Содержание
Четырехквадрантная работа двигателя постоянного тока
Режим двигателя и режим торможения
Двигатель постоянного тока может работать в одном из в двух режимов – в режиме двигателя или в режиме торможения:
- В режиме двигателя происходит преобразование электрической энергию в механическую, двигатель производит крутящий момент, который необходим для осуществления вращения
- В режиме торможения наблюдается обратная ситуация — под действием внешних сил двигатель работает как генератор, преобразуя механическую энергию в электрическую. Нагрузочный момент в этом случае противодействует вращению двигателя
Двигатель может работать как в прямом, так и в реверсном направлении. Таким образом, обеспечивается работа в двигательном режиме или в режиме торможения в двух вариантах направления вращения. Двигатель постоянного тока может работать в обоих направлениях вращения и производить как движение, так и торможение. Эти четыре варианта работы называют четырехквадрантной работой двигателя постоянного тока.
Эти четыре варианта работы называют четырехквадрантной работой двигателя постоянного тока.
Мощность, развиваемая двигателем, определяется произведением угловой скорости на крутящий момент. Режим движения — это такой режим работы двигателя постоянного тока, когда развиваемая им мощность имеет положительный знак. Режим торможения — это режим работы, при котором произведение вектора угловой скорости на крутящий момент имеет отрицательный знак.
Для четырехквадрантной работы двигателя правила знаков скорости и крутящего момента определяются следующим образом:
- Скорость двигателя является положительной при вращении ротора в прямом направлении
- В электромеханических системах с двигателем постоянного тока, осуществляющих поступательное движение вверх и вниз, скорость двигателя при движении вверх является положительной
- Крутящий момент является положительным, если он создает ускорение
- Момент имеет отрицательный знак, если его воздействие вызывает замедление движения
купить блоки управления бесколлекторными двигателями
купить бесколлекторные двигатели
Четырехквадрантная работа двигателя
Четырехквадрантную работу двигателя постоянного тока можно описать следующим образом:
Квадрант I
Мощность, развиваемая электродвигателем в первом квадранте, положительна. Работа осуществляется в двигательном режиме, происходит преобразование электрической энергии в механическую. Работа двигателя в первом квадранте происходит в прямом направлении.
Работа осуществляется в двигательном режиме, происходит преобразование электрической энергии в механическую. Работа двигателя в первом квадранте происходит в прямом направлении.
Квадрант II
Во втором квадранте двигатель вращается в прямом направлении, то есть его скорость имеет положительный знак. Значение крутящего момента имеет отрицательный знак. Направление вращения положительное, то есть скорость положительная, а крутящий момент отрицательный. Следовательно, развиваемая двигателем мощность также имеет отрицательное значение, двигатель работает в режиме генератора, осуществляя противодействие движению. Кинетическая энергия ротора двигателя преобразуется в электрическую энергию. Поэтому работа двигателя во втором квадранте называется торможением в прямом направлении.
Квадрант III
В третьем квадранте и скорость вращения, и крутящий момент имеют отрицательные значения. Их произведение определяет положительное значение мощности. Работа двигателя в третьем квадранте является реверсивным движением.
Их произведение определяет положительное значение мощности. Работа двигателя в третьем квадранте является реверсивным движением.
Квадрант IV
В четвертом квадранте скорость двигателя имеет отрицательное значение, в то время как развиваемый крутящий момент имеет положительный знак. Следовательно, мощность двигателя является отрицательной, что соответствует режиму торможения. Работа двигателя в четвертом квадранте называется реверсивным торможением.
Принцип работы двигателя постоянного тока
MaxPlant
Принцип работы
Двигатели постоянного тока
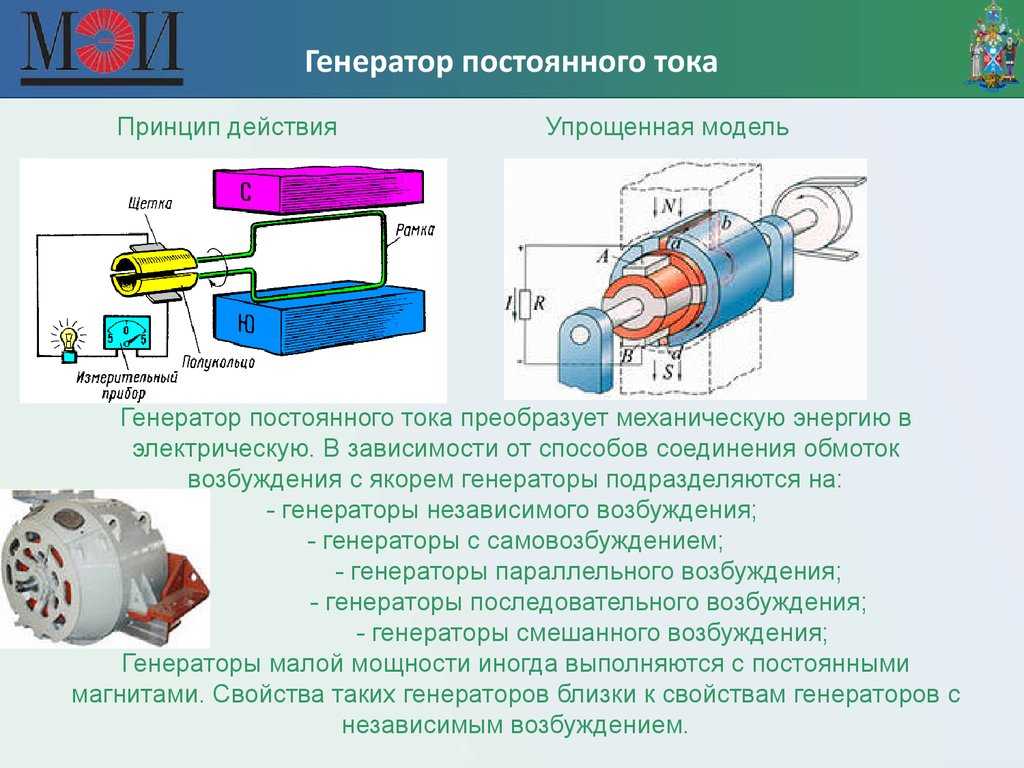
На статоре находится индукторная обмотка (обмотка возбуждения), на которую подаётся постоянный ток —
в результате создаётся постоянное магнитное поле (поле возбуждения).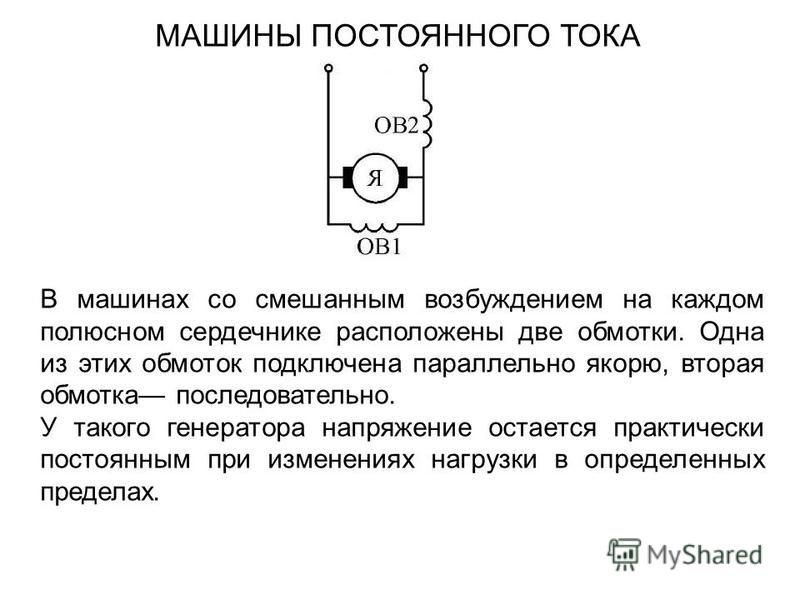
В двигателях с постоянными магнитами поле возбуждения создаётся постоянными магнитами.
В обмотку ротора (якорная обмотка) также подаётся постоянный ток, на который со стороны магнитного поля
статора действует сила Ампера — создаётся вращающий момент, который поворачивает ротор на 90 электрических градусов,
после чего щёточно-коллекторный узел коммутирует обмотки ротора – вращение продолжается.
По способу возбуждения двигатели постоянного тока делятся на четыре группы:
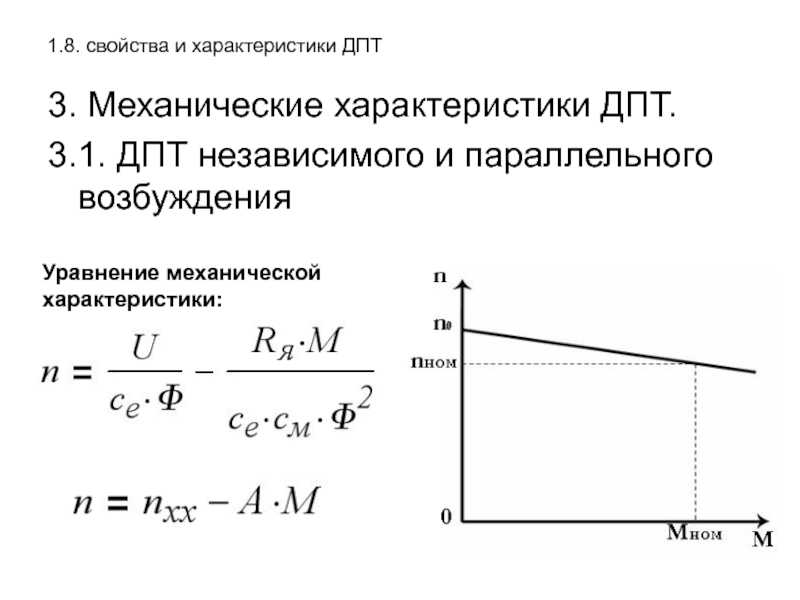
- С независимым возбуждением — обмотка возбуждения питается от независимого источника
- С параллельным возбуждением — обмотка возбуждения включается параллельно источнику питания обмотки якоря
- С последовательным возбуждением — обмотка возбуждения включена последовательно с обмоткой якоря
- Со смешанным возбуждением — у двигателя есть две обмотки: параллельная и последовательная.
Пуск двигателя постоянного тока
При прямом пуске ток якоря может на порядок превышать номинальный, поэтому при пуске в цепь якоря вводится пусковое
сопротивление пусковой реостат.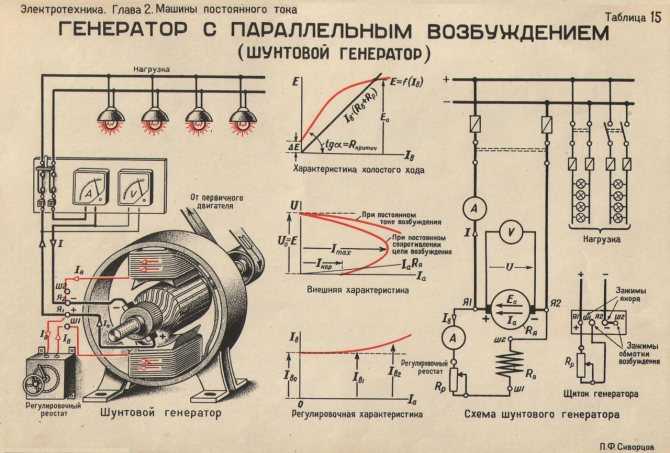 Для плавного пуска реостат делают ступенчатым — в первый момент включаются все ступени
Для плавного пуска реостат делают ступенчатым — в первый момент включаются все ступени
(максимальное сопротивление), по мере разгона двигателя растёт противо-ЭДС, ток якоря уменьшается — ступени выключаются одна
за другой.
Регулирование скорости вращения двигателя постоянного тока
- Скорость ниже номинальной регулируется напряжением на якоре (мощность при этом пропорциональна скорости,
момент неизменен) - Скорость выше номинальной регулируется током обмотки возбуждения — чем слабее поле возбуждения,
тем выше скорость (момент падает при постоянной мощности)
Регулирование питания якоря и обмотки возбуждения осуществляется с помощью тиристорных преобразователей
(приводов постоянного тока).
Преимущества и недостатки двигателей постоянного тока
Преимущества:
- Практически линейные характеристики двигателя:
- механическая характеристика (зависимость частоты от момента)
- регулировочная характеристика (зависимость частоты от напряжения якоря)
- Просто регулировать частоту вращения в широких пределах
- Большой пусковой момент
- Компактный размер.

Недостатки:
- Дополнительные расходы на профилактическое обслуживание коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
- Дороже асинхронных двигателей.
Как выбрать
Выбор двигателя постоянного тока
- Высота оси
- Номинальное напряжение якоря
- Номинальное напряжение возбуждения
- Номинальная частота вращения
- Номинальная мощность
- Номинальный момент
- Номинальный ток якоря
- Мощность возбуждения
- Максимальная частота вращения при понижении поля (выше этой скорости падает мощность)
- Предельно допустимая рабочая скорость (выше этой скорости начинается механическое разрушение)
- КПД
- Момент инерции
- Степень защиты IP
- Степень виброустойчивости (прессы и т.п.)
- Класс изоляции (для работы от преобразователя не ниже F)
- Температура окружающей среды (для работы при отрицательных температурах в условиях русской зимы требуется
специальное исполнение: смазка, вал из специальной стали и т. п.) - Высота установки над уровнем моря (выше 1000 метров падают характеристики)
- Конструктивное исполнение по способу монтажа электродвигателей
- Маслоуплотнённый фланец для присоединения редуктора
- Положение клеммной коробки (справа, сверху и т.д.)
- Тип принудительного охлаждения:
- Конвекционное: воздушный фильтр, контроль расхода воздуха,
встроенный (направление обдува) или внешний (подключение труб) вентилятор - Через теплообменник
- Классификация методов охлаждения электрических двигателей
- Окраска
- Подшипники
- Качения (радиально-упорные)
- Усиленные подшипники для повышенных радиальных нагрузок на валу
- С пополнением смазки
- Для подключения редуктора
- Вал двигателя
- Со шпоночным пазом
- Датчик скорости
- Тахогенератор
- Энкодер
- Тормоз
- Контроль износа щёток
- Окошко для визуального контроля
- Микропереключатель ограничения остаточной длины щёток
- Контроль нагрева двигателя
- Термисторная защита – контроль граничных значений (предупреждение, отключение)
- Непрерывный контроль температуры при помощи датчика KTY
- Подогрев остановленного двигателя (против образования конденсата)
- Уровень шума.
 п.)
п.)
Выбор преобразователя постоянного тока
- Режим работы:
- Одноквадрантный (1Q) — нереверсивный
- Четырёхквадрантный (4Q) — реверсивный.
- Номинальное напряжение питания сети
- Номинальный входной ток
- Напряжение питания (отдельное)
- Вентилятора
- Блока управления (электроники)
- Возбуждения
- Температура окружающей среды
- Высота установки над уровнем моря
- Класс влагостойкости (покрытие плат компаундом)
- Степень защиты IP
- ЭМС-фильтр (фильтр радиопомех).
- Номинальное постоянное напряжение (якоря двигателя)
- Номинальный постоянный ток якоря
- Перегрузочная способность по току
- Номинальная мощность
- Мощность потерь (рассеиваемая мощность) при номинальном токе
- Номинальное постоянное напряжение обмотки возбуждения (напряжение поля)
- Номинальный постоянный ток обмотки возбуждения (ток поля)
- Панель оператора (съёмная, хранение параметров, поддержка русского языка)
- Коммуникационный интерфейс для обмена данными с PLC, HMI (PROFIBUS и др. )
- Точность регулирования
- Встроенные ПИД-регуляторы
- Встроенные функции логического контроллера
- Сигнальные (дискретные и аналоговые) входы-выходы.
Вход:
Выход:
 )
)Мотор-редукторы
Сервопривод
Как работает двигатель постоянного тока?
Электродвигатели постоянного тока сочетают в себе уникальные характеристики производительности и простоту управления, что делает их труднопревзойденными для приложений с регулируемой скоростью. В то время как двигатели переменного тока и средства управления в последнее время развились до такой степени, что стали конкурировать со многими их сильными сторонами, электродвигатели постоянного тока по-прежнему преобладают во многих отраслях, особенно когда требуется компактный, эффективный и быстродействующий двигатель.
Эта статья представляет собой руководство по основам электродвигателей постоянного тока, предоставляя вам информацию, необходимую для самостоятельного решения, подходят ли они для вашего применения.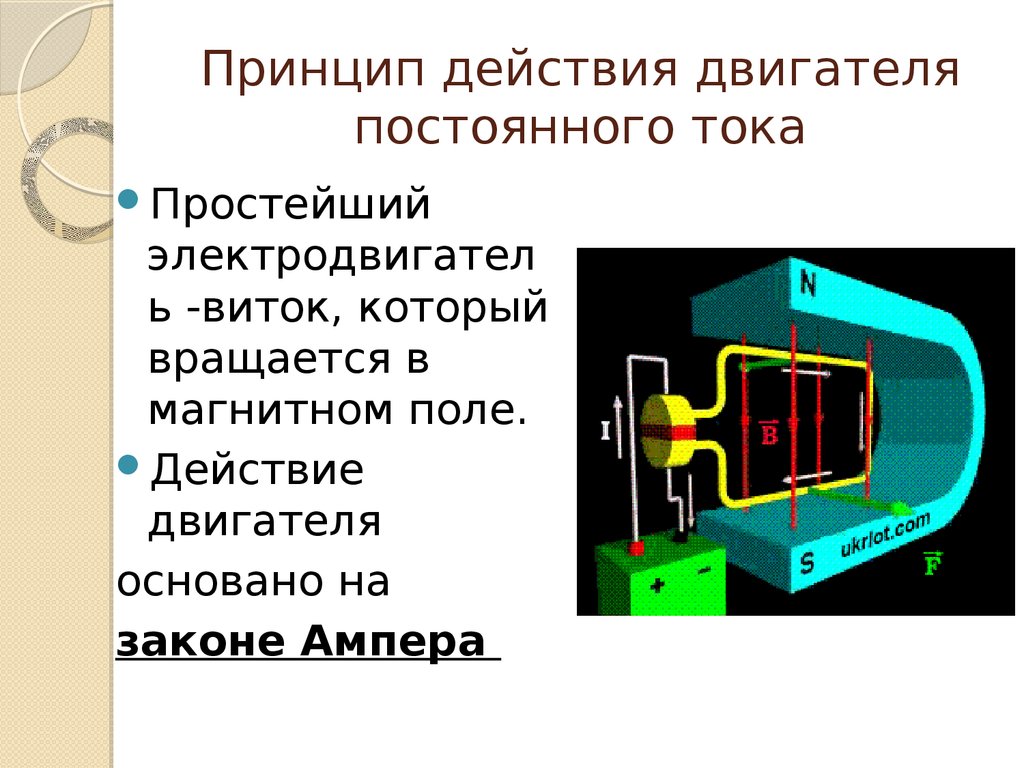
Принципы работы двигателя постоянного тока
Основной принцип работы электродвигателей заключается в том, что провод, по которому течет электрический ток, испытывает физическую силу при прохождении через магнитное поле. Это магнитное поле обычно создается в неподвижной части двигателя (статоре). Он оказывает усилие на проволочные обмотки, прикрепленные к вращающейся части двигателя (якорю), которая прикреплена к выходному валу.
При переключении направления магнитной силы в зависимости от положения ротора якорь ротора попеременно тянется в одном направлении, а затем толкается в противоположном направлении, создавая непрерывное вращательное движение. Этот процесс называется коммутацией.
Критическое различие между двигателями постоянного и переменного тока заключается в том, что для работы двигателя постоянного тока требуется особое коллекторное устройство. Напротив, двигатель переменного тока использует переменный ток входной мощности для управления эффектом переключения.
В щеточном двигателе постоянного тока коллектор имеет проводящую щетку, которая давит на ротор и контактирует с различными частями якоря в зависимости от положения ротора, эффективно используя ротор в качестве переключателя для изменения направления электромагнитного поля. Вместо этого в бесщеточном двигателе постоянного тока используется электронный датчик, обычно датчик Холла, для определения положения ротора и управления коммутацией, что устраняет необходимость в электрическом контакте с ротором.
Типы двигателей постоянного тока
Хотя существует множество вариантов двигателей постоянного тока, есть две ключевые категории, каждая из которых имеет несколько различных типов двигателей.
Двигатели постоянного тока с постоянными магнитами
В двигателях постоянного тока с постоянными магнитами используются магниты либо в якоре, либо в статоре. Эти двигатели могут быть бесщеточными или щеточными.
Бесщеточные двигатели постоянного тока
Если на роторе установлены постоянные магниты, для создания магнитного поля не требуется пропускать электричество через щетки, и такая конфигурация известна как бесщеточный двигатель. Благодаря отсутствию трения и износа щеток бесщеточные двигатели постоянного тока обеспечивают исключительный срок службы, производительность, тихую работу и эффективность (около 90%), что делает их идеальными для приложений, чувствительных к шуму и энергии, таких как HVAC, робототехника и устройства с батарейным питанием. Бесщеточный двигатель постоянного тока определенного типа, известный как шаговый двигатель, может вращаться ступенчато и применять удерживающий крутящий момент, что делает его полезным для робототехники и сервоуправления.
Благодаря отсутствию трения и износа щеток бесщеточные двигатели постоянного тока обеспечивают исключительный срок службы, производительность, тихую работу и эффективность (около 90%), что делает их идеальными для приложений, чувствительных к шуму и энергии, таких как HVAC, робототехника и устройства с батарейным питанием. Бесщеточный двигатель постоянного тока определенного типа, известный как шаговый двигатель, может вращаться ступенчато и применять удерживающий крутящий момент, что делает его полезным для робототехники и сервоуправления.
Использование постоянных магнитов ограничивает бесщеточные двигатели постоянного тока относительно небольшими приложениями. Поскольку для коммутации им требуется электронный датчик, они значительно дороже, чем коллекторные двигатели сопоставимого размера, но экономия энергии может быстро окупить эту разницу.
Щеточные двигатели постоянного тока с постоянными магнитами
Когда в статоре используются постоянные магниты, электричество должно поступать на обмотки ротора, чтобы привести его в действие, и для этого предназначены щетки.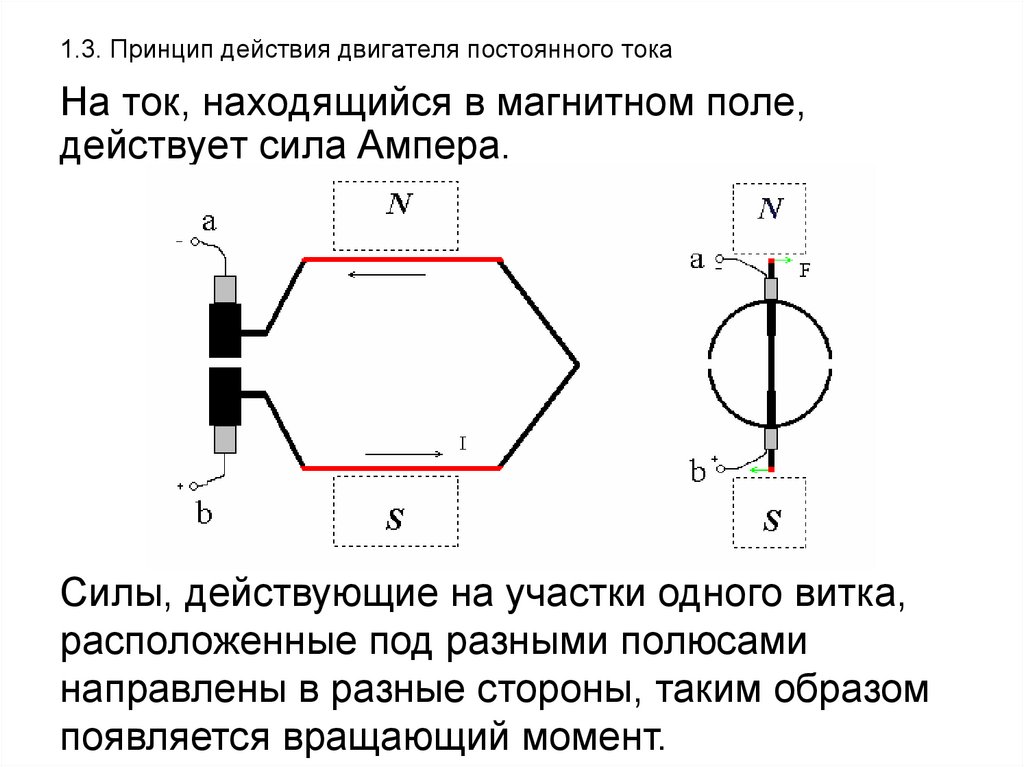 Поскольку точки контакта щеток на роторе построены так, что они попеременно переключают направление магнитного поля ротора, нет необходимости в электронной коммутации. Это снижает стоимость щеточных двигателей постоянного тока, но щетки снижают эффективность примерно до 75%. Износ щеток также создает необходимость их периодической замены и снижает надежность двигателя.
Поскольку точки контакта щеток на роторе построены так, что они попеременно переключают направление магнитного поля ротора, нет необходимости в электронной коммутации. Это снижает стоимость щеточных двигателей постоянного тока, но щетки снижают эффективность примерно до 75%. Износ щеток также создает необходимость их периодической замены и снижает надежность двигателя.
Коллекторные двигатели постоянного тока с постоянными магнитами используются в небольших и недорогих устройствах, таких как бытовая электроника и бытовая техника.
Двигатели постоянного тока с обмоткой возбуждения
Двигатели постоянного тока с обмоткой возбуждения используют электромагниты как на якоре ротора, так и на обмотках возбуждения статора без каких-либо постоянных магнитов, что делает их экономически эффективными для крупных промышленных применений. В этих двигателях используются коммутационные щетки, требующие периодической замены. Существует три основных типа двигателей с обмоткой возбуждения.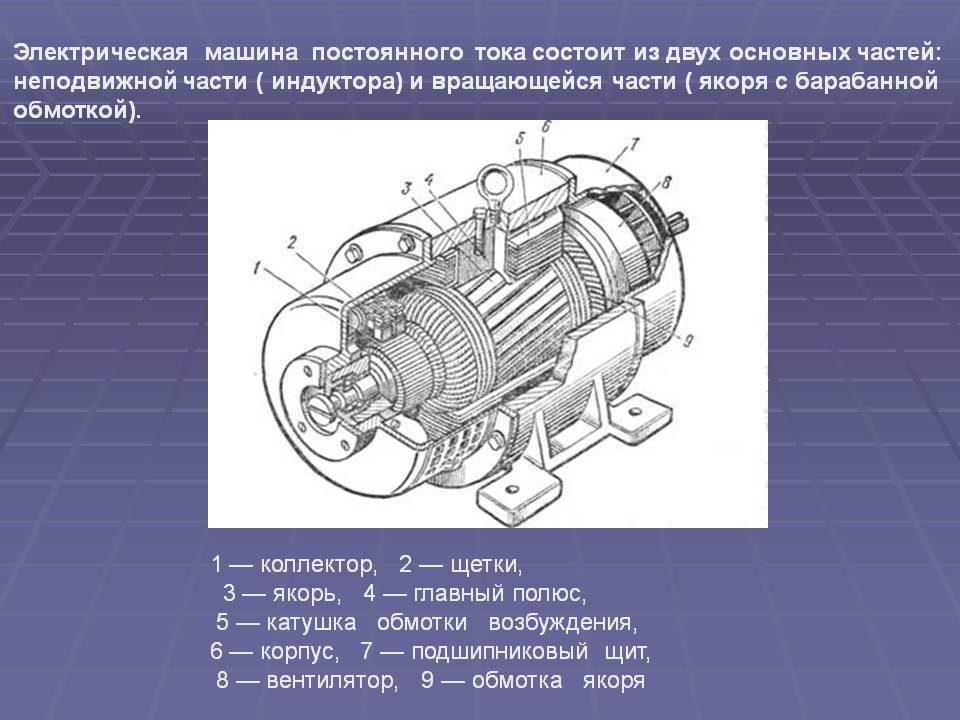
Двигатели постоянного тока серии
Двигатели с последовательным возбуждением имеют обмотки якоря и статора, соединенные последовательно, что означает, что полный ток проходит на якорь. Это обеспечивает гораздо большую скорость и крутящий момент, но затрудняет достижение контроля скорости, поскольку скорость изменяется пропорционально нагрузке. Двигатели с последовательным возбуждением обычно используются в приложениях, требующих высокого пускового момента и мощности без необходимости точного управления скоростью, например, в стартерах и электроинструментах.
Шунтирующие двигатели постоянного тока
Шунтирующие двигатели постоянного тока имеют параллельную обмотку якоря и обмотки возбуждения, что позволяет питать их независимо друг от друга. Это делает управление скоростью относительно простым и дает им уникальную возможность поддерживать постоянную скорость, в основном, независимо от изменений нагрузки. Компромисс заключается в том, что ток распределяется между обмотками якоря и обмотками возбуждения, что приводит к меньшему крутящему моменту, чем у двигателей постоянного тока с последовательной обмоткой. Шунтирующие двигатели постоянного тока обычно используются в приложениях, требующих постоянной или регулируемой скорости, таких как смесители, насосы, конвейеры и подъемники.
Шунтирующие двигатели постоянного тока обычно используются в приложениях, требующих постоянной или регулируемой скорости, таких как смесители, насосы, конвейеры и подъемники.
Комбинированные двигатели постоянного тока
Комбинированные двигатели представляют собой компромисс между последовательными и шунтирующими двигателями постоянного тока с обоими типами обмотки в одном корпусе. Это делает их лучшими из обоих миров, если вам требуется как высокий крутящий момент, так и разумное управление скоростью.
Управление двигателем постоянного тока
Для большинства двигателей постоянного тока управление скоростью относительно простое по сравнению с двигателями переменного тока. Поскольку скорость двигателя пропорциональна напряжению в обмотках двигателя, технически все, что вам нужно, это простая схема регулировки напряжения ШИМ.
Хотя этой схемы может быть достаточно для некоторых приложений, она не может адаптироваться к изменениям скорости, вызванным изменениями нагрузки. Подходящий регулятор скорости будет отслеживать фактическую скорость двигателя, повышая или понижая напряжение для поддержания желаемой скорости.
Подходящий регулятор скорости будет отслеживать фактическую скорость двигателя, повышая или понижая напряжение для поддержания желаемой скорости.
Также легко изменить направление вращения двигателя постоянного тока, поменяв полярность напряжения на клеммах двигателя. Для этого обычно используется простая схема H-моста без использования механических переключателей.
Регуляторы скорости постоянного тока не требуют настройки, а их простота и низкая стоимость делают двигатели постоянного тока отличным выбором для многих типов приложений с переменной скоростью.
Выбор двигателя постоянного тока
Процесс выбора двигателя постоянного тока подобен любому другому электродвигателю. Хотя может быть много разных переменных, которые вам необходимо учитывать, начните с определения того, существуют ли какие-либо ограничения по физическим размерам, где будет размещаться двигатель, особенно в портативных устройствах и бытовой технике. Затем определите доступное напряжение, а также скорость и крутящий момент, необходимые для вашего приложения.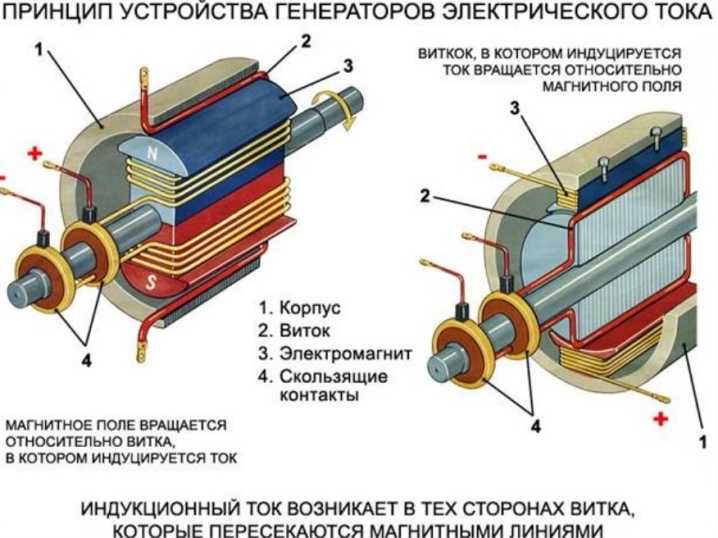 Сравните эту информацию с имеющимися у вас вариантами.
Сравните эту информацию с имеющимися у вас вариантами.
Для небольших применений бесщеточные двигатели обеспечивают выдающуюся эффективность в компактном и прочном корпусе, а щеточные двигатели с постоянными магнитами более экономичны. В последнее время повышенное внимание к энергоэффективности привело к снижению стоимости бесщеточных двигателей, и они являются отличным выбором практически для любых небольших установок.
Более крупные промышленные двигатели, скорее всего, будут двигателями с обмоткой возбуждения, поскольку они не требуют использования дорогих постоянных магнитов. Если вы отдаете предпочтение высокому пусковому крутящему моменту и не нуждаетесь в точном управлении скоростью двигателя, идеально подойдет серийный двигатель постоянного тока. Если вам требуется, чтобы скорость была постоянной и контролируемой, лучшим выбором будут шунтирующие двигатели постоянного тока.
Резюме
Теперь, когда вы понимаете основы двигателей постоянного тока, вы сможете определить, какой тип лучше всего соответствует вашим требованиям. Мы предлагаем широкий выбор двигателей постоянного тока и средств управления, поэтому вы можете создать привод электродвигателя, обеспечивающий требуемую производительность.
Мы предлагаем широкий выбор двигателей постоянного тока и средств управления, поэтому вы можете создать привод электродвигателя, обеспечивающий требуемую производительность.
Есть вопросы? Свяжитесь с нашими экспертами.
Свяжитесь с нашей командой экспертов по электронной почте или телефону.
1-800-890-7593
[email protected]
Как работает бесщеточный двигатель постоянного тока
- Задачи проектирования
Войти
Добро пожаловать!Войти в свой аккаунт
ваше имя пользователя
ваш пароль
Забыли пароль?
Создать учетную запись
Политика конфиденциальности
Регистрация
Добро пожаловать!Зарегистрируйте аккаунт
ваш адрес электронной почты
ваше имя пользователя
Пароль будет отправлен вам по электронной почте.
Политика конфиденциальности
Восстановление пароля
Восстановить пароль
ваш адрес электронной почты
Поиск
Изменено:
Статьи категории
Содержание
Бесщеточные двигатели постоянного тока бесщеточные двигатели постоянного тока обычно способны достигать КПД 85-90 процентов, в то время как щеточные двигатели обычно имеют КПД около 75-90%. 80 процентов. Щетки со временем изнашиваются, часто вызывая искры, которые могут быть опасны и могут сократить срок службы двигателя. Рекомендуется использовать бесщеточные двигатели постоянного тока, они тише, эффективнее и служат дольше. Двигатели BLDC предлагают множество преимуществ по сравнению с другими типами электродвигателей.
Как работает бесщеточный двигатель постоянного тока
Чтобы лучше понять, как работают бесщеточные двигатели, мы должны сначала вспомнить, как работают щеточные двигатели постоянного тока, поскольку они использовались в течение некоторого времени до появления бесщеточных двигателей постоянного тока.
В этом типе двигателя электрический ток пропускается через катушки, установленные в постоянном магнитном поле.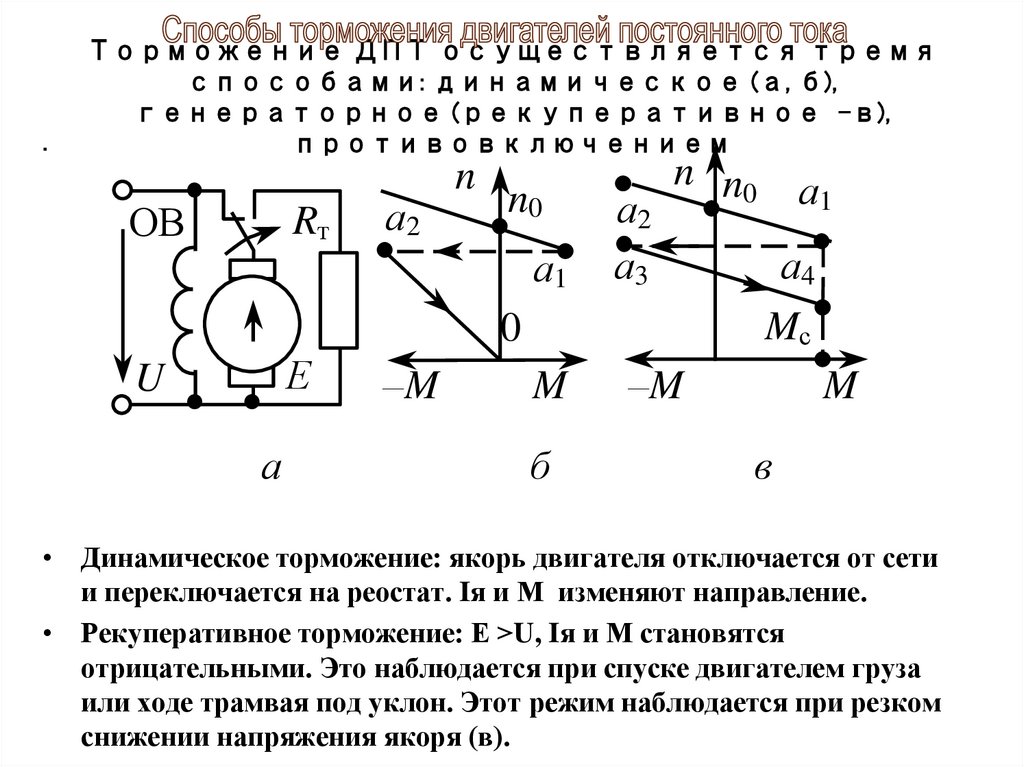 Ток генерирует магнитные поля внутри катушек. Это приводит к перемещению катушек, поскольку каждая катушка оттягивается от другого полюса, а затем притягивается к противоположной стороне магнитного поля. Чтобы катушки продолжали вращаться, необходимо постоянно изменять направление тока, чтобы полярность катушек постоянно менялась, что заставляет катушки «преследовать» другие неподвижные полюса. Питание катушек подается постоянными токопроводящими щетками, которые соприкасаются с вращающимся коммутатором; это движение коммутатора, которое меняет направление тока, протекающего через катушки. Коллектор и щетки являются основными компонентами, которые отличают щеточный двигатель постоянного тока от двигателей других типов.
Ток генерирует магнитные поля внутри катушек. Это приводит к перемещению катушек, поскольку каждая катушка оттягивается от другого полюса, а затем притягивается к противоположной стороне магнитного поля. Чтобы катушки продолжали вращаться, необходимо постоянно изменять направление тока, чтобы полярность катушек постоянно менялась, что заставляет катушки «преследовать» другие неподвижные полюса. Питание катушек подается постоянными токопроводящими щетками, которые соприкасаются с вращающимся коммутатором; это движение коммутатора, которое меняет направление тока, протекающего через катушки. Коллектор и щетки являются основными компонентами, которые отличают щеточный двигатель постоянного тока от двигателей других типов.
На картинке выше показана основная идея двигателя щетки. Неподвижные щетки подают электрический ток на вращающийся коммутатор. Когда коммутатор вращается, он постоянно меняет направление тока, протекающего через катушки, меняет полярность катушек, чтобы гарантировать, что они остаются в направлении по часовой стрелке.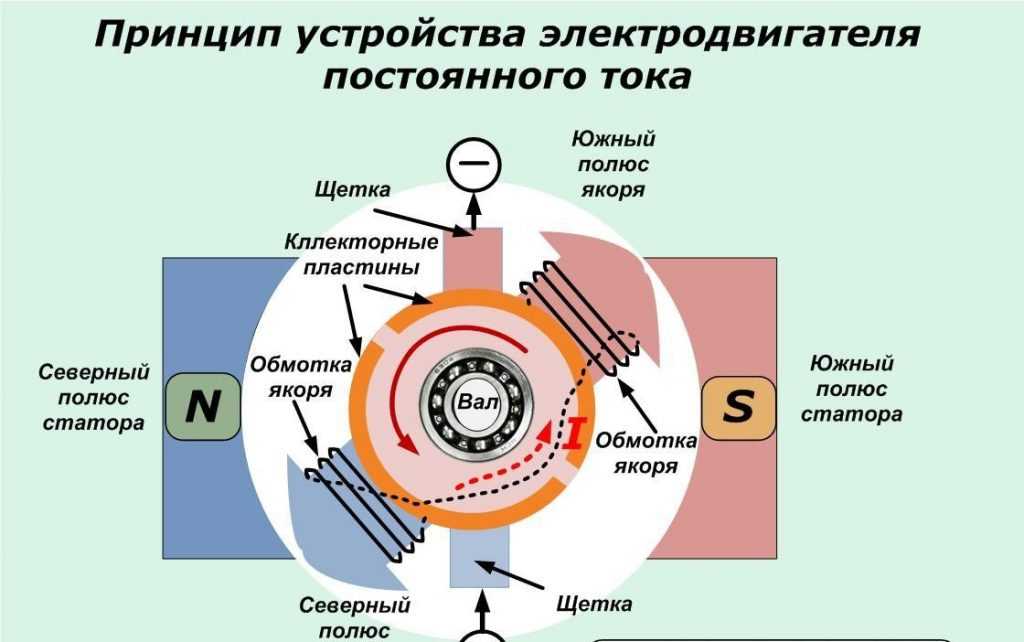 Коллектор может вращаться, потому что он соединен с ротором, на котором установлены катушки.
Коллектор может вращаться, потому что он соединен с ротором, на котором установлены катушки.
Почему бесщеточные двигатели постоянного тока вращаются
Как следует из названия, в бесщеточных двигателях постоянного тока щетки не используются. В щеточных двигателях щетки передают ток через коммутатор к обмоткам ротора. Как бесколлекторный двигатель передает энергию катушкам на роторе? Он не может передавать, так как катушки не размещены в роторе. Ротор действует как постоянный магнит. Катушки не вращаются, а связаны со статором. Поскольку катушки не двигаются, нет необходимости в щетках или коммутаторе.
Преимущества бесщеточного двигателя постоянного тока
Бесщеточный двигатель постоянного тока с тремя катушками в статоре будет иметь 6 электрических проводов (по два на каждую катушку), которые подключены к катушкам. В большинстве случаев три провода соединены внутри, а остальные три провода торчат из корпуса двигателя (в отличие от двух проводов, которые выступают из двигателя щеток, как описано ранее). Проводка внутри корпуса двигателя BLDC сложнее, чем просто подключение отрицательного и положительного проводов к аккумуляторной ячейке. Мы более подробно изучим работу этих двигателей в следующем сегменте, который мы рассмотрим в этой серии. В заключение рассмотрим преимущества двигателей BLDC.
Проводка внутри корпуса двигателя BLDC сложнее, чем просто подключение отрицательного и положительного проводов к аккумуляторной ячейке. Мы более подробно изучим работу этих двигателей в следующем сегменте, который мы рассмотрим в этой серии. В заключение рассмотрим преимущества двигателей BLDC.
Основным преимуществом является их эффективность, поскольку они могут работать непрерывно при максимальной силе вращения (крутящем моменте). Щеточные двигатели, напротив, могут создавать максимальный крутящий момент при низких оборотах. Чтобы электрический щеточный двигатель создавал такой же крутящий момент, что и бесщеточная версия, модели потребуются магниты гораздо большего размера. Таким образом, даже самые маленькие двигатели BLDC будут обеспечивать большую мощность.
Еще одно важное преимущество, связанное с предыдущим, — это возможность управления. Бесщеточный двигатель BLDC управляется с помощью механизмов обратной связи, которые точно обеспечивают требуемый крутящий момент и скорость. Точный контроль снижает потребление энергии, а также производство тепла. когда двигатели питаются от батарей, продлевает срок службы батарей.
Точный контроль снижает потребление энергии, а также производство тепла. когда двигатели питаются от батарей, продлевает срок службы батарей.
Двигатели постоянного тока BLDC также могут обеспечить более длительный срок службы и меньший электрический шум благодаря отсутствию щеток. Щеточные двигатели — отличный выбор, поскольку коллектор и щетки изнашиваются из-за постоянного контакта, а также могут вызывать искрение при соприкосновении. В частности, электрический шум вызван сильными искрами, которые обычно возникают в местах, где щетки проходят через зазоры внутри коллектора. По этой причине двигатели BLDC обычно предпочтительнее в ситуациях, когда важно минимизировать электрические шумы.
Недостатки бесщеточного двигателя постоянного тока
К недостаткам бесщеточных устройств относятся возможность размагничивания постоянных магнитов, проблемы с контролем величины магнитного потока и высокая цена преобразователя, которая растет с ростом уровня мощности машины.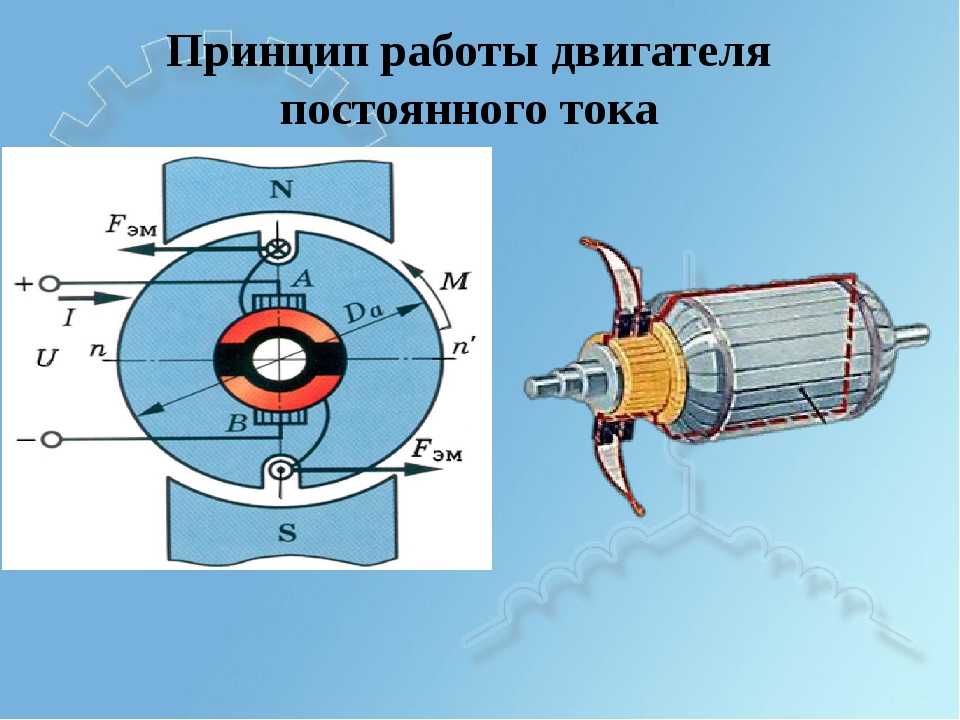 Бесщеточные двигатели также страдают от пульсаций магнитного крутящего момента. Несмотря на то, что существует много исследований, посвященных двигателям BLDC, небольшое количество публикаций посвящено изучению электромагнитных явлений, таких как анализ электромагнитного поля, анализ магнитного сопротивления и температурные эффекты. Анализ пульсации крутящего момента обычно фокусируется на отставании крутящего момента.
Бесщеточные двигатели также страдают от пульсаций магнитного крутящего момента. Несмотря на то, что существует много исследований, посвященных двигателям BLDC, небольшое количество публикаций посвящено изучению электромагнитных явлений, таких как анализ электромагнитного поля, анализ магнитного сопротивления и температурные эффекты. Анализ пульсации крутящего момента обычно фокусируется на отставании крутящего момента.
Применение бесщеточных двигателей постоянного тока
Мы убедились, что бесщеточные двигатели постоянного тока обладают высокой эффективностью и управляемостью, а также имеют длительный срок службы. Для чего они работают? Благодаря своей эффективности и долговечности они часто используются в приборах, работающих в непрерывном режиме. Они уже давно используются в стиральных машинах, кондиционерах и других электронных устройствах для потребителей, а в последнее время они теперь используются в вентиляторах, и их эффективность позволила им резко снизить потребление энергии.
Их также можно использовать для управления вакуумными машинами. В одном случае изменение программы управления вызвало значительное увеличение скорости двигателя, что является одним из примеров превосходных возможностей управления, предлагаемых этими двигателями.
Двигатели постоянного тока BLDC также можно использовать для вращения жестких дисков. их долговечность обеспечивает надежность приводов в течение длительного времени. Кроме того, их энергоэффективность помогает сократить потребление энергии в области, где это становится все более важным.
Мы можем ожидать, что двигатели BLDC будут использоваться чаще в ближайшем будущем. Они, вероятно, будут использоваться для управления сервисными роботами, небольшими роботами, которые предоставляют услуги вне производства. Можно предположить, что шаговые двигатели могут лучше подходить для такой работы, в которой можно использовать импульсы для обеспечения точного управления позиционированием. Однако двигатели BLDC больше подходят для управления силами. В случае с шаговым двигателем, поддерживающим положение объекта, например манипулятора робота, потребуется массивный и постоянный ток. При использовании двигателя BLDC все, что требуется, — это постоянный ток, который пропорционален внешней силе, и это позволяет более эффективно контролировать силу. Двигатели BLDC также могут заменить щеточные двигатели постоянного тока на мобильных тележках и тележках для гольфа. Наряду с более высокими характеристиками двигатели BLDC также могут обеспечивать более точное управление, что, в свою очередь, может продлить срок службы батареи.
В случае с шаговым двигателем, поддерживающим положение объекта, например манипулятора робота, потребуется массивный и постоянный ток. При использовании двигателя BLDC все, что требуется, — это постоянный ток, который пропорционален внешней силе, и это позволяет более эффективно контролировать силу. Двигатели BLDC также могут заменить щеточные двигатели постоянного тока на мобильных тележках и тележках для гольфа. Наряду с более высокими характеристиками двигатели BLDC также могут обеспечивать более точное управление, что, в свою очередь, может продлить срок службы батареи.
Бесщеточные двигатели постоянного тока BLDC, подходящие для дронов. Их способность обеспечивать точное управление делает их идеальными для многороторных дронов, в которых движение дрона точно контролируется за счет контроля скорости вращения каждого двигателя.
Ссылки:
https://www.ebmia.pl/wiedza/porady/automatyka-porady/silnik-bezszczotkowy-bldc-co-to-jest-jak-dziala-zastosowanie/
Michal
Электроника и телекоммуникации инженер с дипломом магистра электроэнергетики.