Содержание
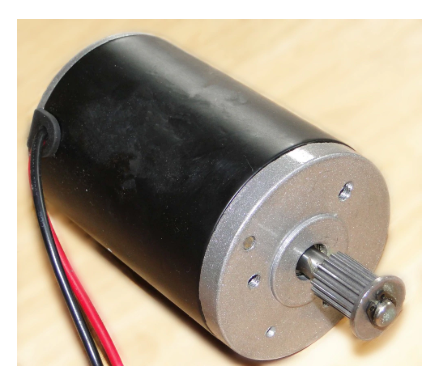
Электронно-коммутируемый бесщеточный двигатель постоянного тока Maxon motor EC-max 30 272765
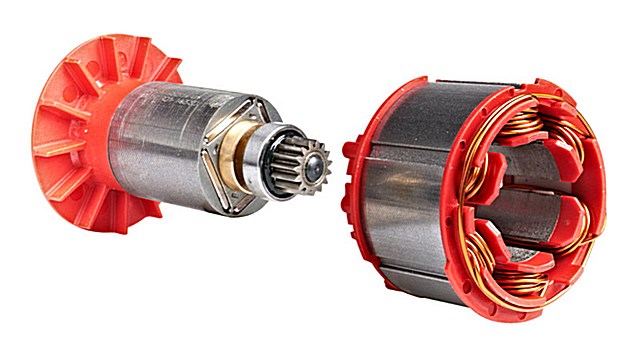
Двигатель серии ЕС-max Maxon motor — это бесщеточный электродвигатель
постоянного тока с магнитными сегментами в роторе и с интегрированной
электроникой коммутации.
Эти двигатели
характеризуются главным образом их выгодной механической характеристикой,
высокой мощностью, чрезвычайно широким диапазоном числа оборотов и конечно, их
непревзойденным сроком службы.
«Сердце» двигателя – это безжелезная
обмотка. Корпус двигателя — простая труба, сделанная из нержавеющей стали – не
магнитный, твердый, нержавеющий. Металлический корпус и фланец двигателя имеют
хорошую теплоотдачу и механическую стабильность. Шпиндель без канавки гарантирует
устойчивость к крутильным колебаниям и плавный ход. Кабели могут быть
направлены и радиально и в осевом направлении от двигателя. Широкий диапазон
вариантов штепселя. Модульная конструкция двигателя с редукторами, датчиками и
Модульная конструкция двигателя с редукторами, датчиками и
тормозами.
Версия двигателя:
— бесщеточный.
|
Характеристика двигателя
(значения при номинальном напряжении)
| |||
|
Номинальная мощность, Вт
|
60
| ||
|
Номинальное
|
48,0
| ||
|
Число оборотов без
|
9340
| ||
|
Сила тока без
|
100
| ||
|
Номинальное число
|
8150
| ||
|
Номинальный крутящий
(макс.
|
62,8
| ||
|
Номинальная сила тока
(макс. продолжительная
|
1,38
| ||
|
Момент при
|
519
| ||
|
Начальная сила тока, А
|
10,7
| ||
|
Макс. КПД, %
|
82
| ||
|
Предельное
|
4,49
| ||
|
Предельная
|
0,573
| ||
|
Моментный коэффициент,
|
48,6
| ||
|
Коэффициент числа
|
197
| ||
|
Градиент числа
|
18,2
| ||
|
Механическая
|
4,17
| ||
|
Момент инерции ротора,
|
21,9
| ||
|
Термические данные
| |||
|
Термическое
|
7,4
| ||
|
Термическое
|
0,5
| ||
|
Тепловая постоянная
|
2,76
| ||
|
Тепловая постоянная
|
1000
| ||
|
Окружающая
|
-40…+100
| ||
|
Макс.
|
+155
| ||
|
Механические данные (шарикоподшипники с
| |||
|
Макс. допускаемое
|
15000
| ||
|
Осевой зазор при
|
<6,0Н=0
>6,0Н=max0,14
| ||
|
Радиальный зазор, мм
|
с натягом
| ||
|
Макс. осевая нагрузка
|
5,5
| ||
|
Макс. сила для
|
98
| ||
|
Макс.
|
25
| ||
|
Другие данные
| |||
|
Число полюсных пар
|
1
| ||
|
Число фаз
|
3
| ||
|
Масса двигателя, г
|
305
| ||
 продолжительный
продолжительный
 допускаемая температура
допускаемая температура
 радиальная
радиальная
Бесщеточные двигатели постоянного тока в Комсомольске-на-Амуре: 500-товаров: бесплатная доставка, скидка-74% [перейти]
Партнерская программаПомощь
Комсомольск-на-Амуре
Каталог
Каталог Товаров
Одежда и обувь
Одежда и обувь
Стройматериалы
Стройматериалы
Текстиль и кожа
Текстиль и кожа
Здоровье и красота
Здоровье и красота
Детские товары
Детские товары
Продукты и напитки
Продукты и напитки
Электротехника
Электротехника
Дом и сад
Дом и сад
Сельское хозяйство
Сельское хозяйство
Промышленность
Промышленность
Мебель и интерьер
Мебель и интерьер
Все категории
ВходИзбранное
Бесщеточные двигатели постоянного тока
Электрический бесщеточный двигатель постоянного тока 12 В с высоким крутящим моментом, редукторный электродвигатель с коробкой передач S30K, двигатель
ПОДРОБНЕЕЕще цены и похожие товары
11 200
Электродвигатель постоянного тока (бесщеточный) 10. 8В для аккумуляторной дрели-шуруповерта BOSCH GSR 12 V -EC (Type 3601JD4081)
8В для аккумуляторной дрели-шуруповерта BOSCH GSR 12 V -EC (Type 3601JD4081)
ПОДРОБНЕЕЕще цены и похожие товары
Электрический бесщеточный двигатель постоянного тока 5 в 6000 об/мин 24 мм 2418 BLDC микро-двигатель с длительным сроком службы и низким уровнем шума
ПОДРОБНЕЕЕще цены и похожие товары
11 186
Эл. двигатель постоянного тока (бесщеточный) 10,8В BOSCH Тип: мотор, Производитель: BOSCH,
ПОДРОБНЕЕЕще цены и похожие товары
14 705
Импортные KNF с бесщеточным двигателем постоянного тока с двумя головками мембранный насос вакуумный насос PU1488-N838.0-3.03 24V 4.0A
ПОДРОБНЕЕЕще цены и похожие товары
11 200
Электродвигатель постоянного тока (бесщеточный) 10.8В для аккумуляторной дрели-шуруповерта BOSCH GSR 10,8V-EC HX (Type 3601JD4150)
ПОДРОБНЕЕЕще цены и похожие товары
11 200
Электродвигатель постоянного тока (бесщеточный) 10. 8В для аккумуляторной дрели-шуруповерта BOSCH GSR 12V-20 HX (Type 3601JD4101)
8В для аккумуляторной дрели-шуруповерта BOSCH GSR 12V-20 HX (Type 3601JD4101)
ПОДРОБНЕЕЕще цены и похожие товары
11 200
Электродвигатель постоянного тока (бесщеточный) 10.8В для аккумуляторной дрели-шуруповерта BOSCH GSR 10,8V-EC HX (Type 3601JD4100)
ПОДРОБНЕЕЕще цены и похожие товары
11 200
Электродвигатель постоянного тока (бесщеточный) 10.8В для аккумуляторной дрели-шуруповерта BOSCH GSR 10,8 V-EC (Type 3601JD40B0)
ПОДРОБНЕЕЕще цены и похожие товары
11 200
Электродвигатель постоянного тока (бесщеточный) 10.8В для аккумуляторной дрели-шуруповерта BOSCH GSR 12 V-EC (Type 3601JD40L1)
ПОДРОБНЕЕЕще цены и похожие товары
27 389
38040
Бесщеточный двигатель постоянного тока 500 Вт 220 В/5000 А SIEG SC2-014 об/мин, реактивный двигатель токарного станка
ПОДРОБНЕЕЕще цены и похожие товары
11 186
Эл. двигатель постоянного тока (бесщеточный) 10,8В для дрели-шуруповерта аккумуляторного BOSCH PS22 (Тип 3601JD4110)
двигатель постоянного тока (бесщеточный) 10,8В для дрели-шуруповерта аккумуляторного BOSCH PS22 (Тип 3601JD4110)
ПОДРОБНЕЕЕще цены и похожие товары
34 943
Электрическая бесщеточная струйная доска для серфинга, кв, Водонепроницаемый морской подводный двигатель постоянного тока с пропеллером
ПОДРОБНЕЕЕще цены и похожие товары
5 444
6532
FLIPSKY H6368 140KV 1720 Вт бесщеточный двигатель постоянного тока для электрического скейтборда E-велосипедных частей —
ПОДРОБНЕЕЕще цены и похожие товары
11 200
Электродвигатель постоянного тока (бесщеточный) 10.8В для аккумуляторной дрели-шуруповерта BOSCH GSR 10,8V-EC (Type 3602D94900)
ПОДРОБНЕЕЕще цены и похожие товары
45 283
Мощные 3 кВт электродвигатели Набор для преобразования электрического автомобиля бесщеточный двигатель постоянного тока жидкий двигатель
ПОДРОБНЕЕЕще цены и похожие товары
11 200
Электродвигатель постоянного тока (бесщеточный) 10. 8В для аккумуляторной дрели-шуруповерта BOSCH GSR 10,8V-EC TE (Type 3601JD4000)
8В для аккумуляторной дрели-шуруповерта BOSCH GSR 10,8V-EC TE (Type 3601JD4000)
ПОДРОБНЕЕЕще цены и похожие товары
19 867
22577
Высокоскоростной бесщеточный дифференциальный двигатель постоянного тока, DC48V60V72V, 3500 Вт, аксессуары для электромобиля
ПОДРОБНЕЕЕще цены и похожие товары
7 035
7994
Маленький магнитный бесщеточный двигатель постоянного тока, 48 В/60 в/72 в, 1500 Вт, 3200 об/мин, дифференциальный двигатель, электрический скутер
ПОДРОБНЕЕЕще цены и похожие товары
STM8-QC бесщёточный двигатель постоянного тока
ПОДРОБНЕЕЕще цены и похожие товары
13 155
18794
Доски для серфинга, моторная лодка, бесщеточный двигатель постоянного тока 65111 IP68, водонепроницаемый, 3000 Вт, КВ, бесщеточный прямой привод,
ПОДРОБНЕЕЕще цены и похожие товары
3660 Швейцарский бесщеточный двигатель постоянного тока для электромобиля двигатель кв с взрывобезопасным регулированием скорости для высокомощного
ПОДРОБНЕЕЕще цены и похожие товары
3660 Швейцарский бесщеточный двигатель постоянного тока для электромобиля двигатель кв с взрывобезопасным регулированием скорости для высокомощного
ПОДРОБНЕЕЕще цены и похожие товары
17 749
Бесщёточный двигатель постоянного тока Тип запчастей: электродвигатели, регуляторы скорости
ПОДРОБНЕЕЕще цены и похожие товары
3 390
3606
Бесщеточный внешний роторный двигатель постоянного тока C6374 кв, неиндуктивный/индуктивный двигатель
ПОДРОБНЕЕЕще цены и похожие товары
Бесщеточный микро-двигатель, электрический двигатель постоянного тока 12 В 24 В, металлические Шестеренчатые двигатели, редукция BLDC, скорость 12 до
ПОДРОБНЕЕЕще цены и похожие товары
11 186
Эл. двигатель постоянного тока (бесщеточный) 10,8В для дрели-шуруповерта аккумуляторного BOSCH GSR 10,8V-EC TE (Тип 3601JD4000)
двигатель постоянного тока (бесщеточный) 10,8В для дрели-шуруповерта аккумуляторного BOSCH GSR 10,8V-EC TE (Тип 3601JD4000)
ПОДРОБНЕЕЕще цены и похожие товары
3 390
3606
Бесщеточный внешний роторный двигатель постоянного тока C6374 кв, неиндуктивный/индуктивный двигатель
ПОДРОБНЕЕЕще цены и похожие товары
2 страница из 18
Почему бесщеточные электродвигатели набирают популярность?
Все больше самых различных моделей электроинструментов применяют на себе бесщеточные электродвигатели. Дело доходит даже до отбойных молотков
Прогресс не стоит на месте, то и дело внедряются новые разработки, благодаря которым техника становится лучше и совершеннее. Так, на смену классических электрических двигателей постепенно приходят бесщеточные (вентильные). Стоит подробнее рассказать о том, по какому принципу они работают, чем отличаются от обычных и в чем их превосходят.
Принцип работы бесщеточного двигателя
В бесщеточном двигателе щеточно-коллекторный узел заменен полупроводниковым коммутатором. Он работает за счет электрических приводов, которые создают магнитное вращающееся поле. Это конструкция нового типа, в которой обмотки на статоре или элементах ротора нет. Разработка такого двигателя – результат использования материалов с большой коэрцитивной силой и уровнем магнитного насыщения, позволяющим получить сильное магнитное поле.
Отсутствие обмотки ротора и механических коммутационных элементов – те технические решения, которые позволяют создавать надежные двигатели по доступной цене. Эти решения существенно упрощают сам процесс их изготовления.
Бесщеточный двигатель может работать как на переменном, так и на непрерывном токе. В случае с непрерывным током он похож на коллекторный двигатель, но у последнего более сложная конструкция, так как основа непременно содержит электронный коммутатор.
Характерные особенности и преимущества бесщеточных двигателей
Бесщеточный двигатель имеет функционал щеточного, но превосходит его по ряду параметров. Единственным его недостатком можно назвать то, что по стоимости он пока превосходит аналоги с классическим мотором, но этот момент в полной мере компенсируется большим перечнем достоинств устройства. Основные преимущества механизма:
- эффективность;
- при намагничивании нет изменений, как и при утечке тока;
- энергонасыщенность;
- скорость вращения и вращающий момент полностью соответствуют;
- большой диапазон смены частоты вращения;
- скорость не зависит от центробежной силы;
- нет узлов, которые нужно часто обслуживать;
- в конструкции применяются легкие и небольшие магниты;
- не нужны коммутатор и обмотка возбуждения.
Сферы применения бесщеточных двигателей
Вентильные двигатели постоянного тока, как правило, применяются для оборудования с мощностью не выше 5 кВт. Для оборудования мощнее использовать такие двигатели нецелесообразно. Постоянные магниты в бесщеточных моторах очень чувствительны к воздействию мощных полей и высоких температур, что нехарактерно для щеточных и индукционных аналогов.
Для оборудования мощнее использовать такие двигатели нецелесообразно. Постоянные магниты в бесщеточных моторах очень чувствительны к воздействию мощных полей и высоких температур, что нехарактерно для щеточных и индукционных аналогов.
Бесщеточные двигатели надежны и хорошо управляемы, поэтому они используются повсеместно, как для мелких механизмов, так и для крупных. Они применяются в автомобильных приводах, электрических мотоциклах, компьютерах, электроинструменте, бытовой технике. Двигатели очень востребованы в промышленности, авиационной технике. Благодаря отсутствию коллекторного узла такие двигатели можно использовать даже в опасных условиях, местах с повышенным уровнем влажности.
Metabo выходит на новый уровень, внедряя бесщеточные двигатели в свою технику
Компания Metabo летом 2019 года презентовала широкой аудитории инновационную для отечественного рынка серию отбойных молотков и сетевых перфораторов SDS-Max. Устройства этой линейки оснащены бесщеточными двигателями, что выгодно отличает их от большинства аналогов. В сетевом инструменте такие двигатели пока применяются не слишком часто, особенно если инструмент очень мощный.
В сетевом инструменте такие двигатели пока применяются не слишком часто, особенно если инструмент очень мощный.
Сетевые инструменты с бесщеточными двигателями обладают всеми теми же преимуществами, что и аккумуляторные инструменты. Ключевые достоинства:
- Бесколлекторная схема повышает КПД мотора. Если сравнить бесщеточный перфоратор Metabo с обыкновенным, то при равном потреблении сетевой мощности оборудование Metabo будет меньше греться и выполнит больше функций.
- Высокая надежность. Инструмент с вентильным двигателем имеет более длительный срок эксплуатации, чем обычный, и не нуждается в частом обслуживании. В нем не нужно будет менять щетки, поэтому расходы на ремонт и обслуживания будут существенно снижены. По технике с высоким уровнем вибрации, как отбойные молотки и перфораторы, преимущество отсутствия щеток в двигателе особенно заметно. Из-за колебаний, однозначно возникающих при долблении и бурении, срок службы щеток в разы сокращается.
 Бесщеточным перфораторам и отбойным молоткам Metabo это не грозит.
Бесщеточным перфораторам и отбойным молоткам Metabo это не грозит. - Частоту вращения мотора легко регулировать и поддерживать на необходимом уровне, даже при увеличении нагрузки, перепадах напряжения, ухудшении формы напряжения. Бесщеточные перфораторы и отбойные молотки Metabo будут высокопроизводительны даже при эксплуатации в сложных условиях.
 Бесщеточным перфораторам и отбойным молоткам Metabo это не грозит.
Бесщеточным перфораторам и отбойным молоткам Metabo это не грозит.
Бесщеточные двигатели обладают массой преимуществ, потому сфера их применения необычайно широка, они используются даже в космической промышленности и ракетостроении. Работающие на таких моторах механизмы с каждым днем становятся популярнее в самых разных сферах.
Что такое бесщеточный двигатель постоянного тока и в чем отличия от синхронного двигателя переменного тока
Update:06-11-2020
Summary:…
Короткий ответ: бесщеточные двигатели постоянного тока и синхронные двигатели переменного тока очень похожи с точки зрения конструкции и работы. Некоторые производители могут даже сгруппировать их вместе в секции синхронного двигателя с постоянными магнитами. Однако ключевым отличием является обмотка катушки статора и соответствующая обратная ЭДС для каждого двигателя. Это дает им разные рабочие характеристики и обусловливает их собственную технологию привода.
Однако ключевым отличием является обмотка катушки статора и соответствующая обратная ЭДС для каждого двигателя. Это дает им разные рабочие характеристики и обусловливает их собственную технологию привода.
Структурное сходство
Несмотря на особенности их названий, как бесщеточные двигатели постоянного тока, так и синхронные двигатели переменного тока являются бесщеточными, и оба работают с синхронными скоростями. Бесщеточные означает, что они полагаются на электронные устройства (обычно датчики Холла) вместо механических угольных щеток для управления током, подаваемым на обмотки. А синхронизация означает, что их магнитные обмотки ротора и статора вращаются с синхронной частотой или с синхронной скоростью.
Как бесщеточные двигатели постоянного тока, так и синхронные двигатели переменного тока имеют постоянные магниты, встроенные в ротор (обычно 4 или более). Магнит ротора может быть ферритовым, что дешевле, но плотность магнитного потока относительно низкая. Или редкоземельный сплав (например, неодим), который имеет высокую плотность магнитного потока, но в некоторых справочниках его цена очень высока. Статор состоит из металлических пластин, а обмотки (обычно три) размещены в продольных пазах.
Статор состоит из металлических пластин, а обмотки (обычно три) размещены в продольных пазах.
Постоянные магниты ротора создают магнитный поток ротора, а ток, приложенный к обмоткам статора, создает электронные магнитные полюса. Когда положение статора таково, что полюс N ротора близок к полюсу N статора, два полюса отталкиваются друг от друга, и создается крутящий момент.
Разница в работе и производительности
В бесщеточном двигателе постоянного тока обмотка статора намотана в форме трапеции, а генерируемая противодвижущая сила имеет трапециевидную форму волны. Из-за трапециевидной формы сигнала достигается необходимый постоянный ток для лучшей производительности. Напротив, синхронные двигатели переменного тока имеют синусоидальную намотку и создают синусоидальную противоэлектродвижущую силу. Следовательно, для получения лучших характеристик им требуется синусоидальный ток.
Этот тип тока будет влиять на общий шум, создаваемый двигателем. Трапециевидный ток, используемый в бесщеточные мотор-редукторы постоянного тока имеет тенденцию производить огромный слуховой и электронный шум по сравнению с синхронными двигателями переменного тока с синусоидальными приводами.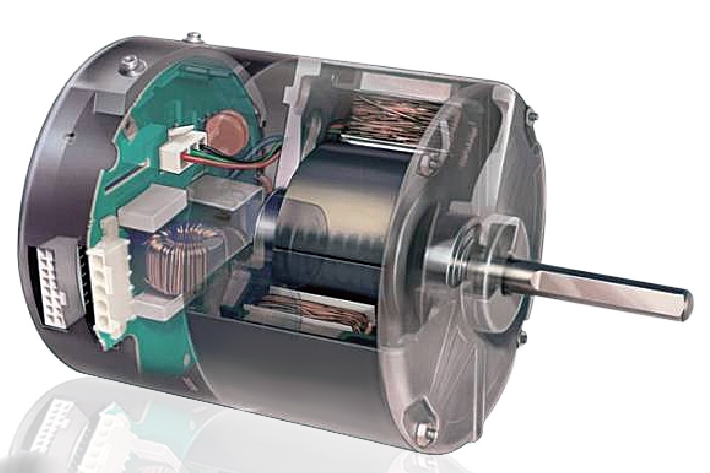
Коммутация, которая заключается в преобразовании фазного тока двигателя в соответствующую электронную катушку, которая определяется положением статора. В бесщеточном двигателе постоянного тока положение ротора обычно контролируется тремя датчиками Холла. И коммутация осуществляется через шесть шагов или каждые 60 электронных углов. Поскольку коммутация является прерывистой, колебания крутящего момента будут генерироваться во время каждой коммутации (каждые 60 градусов).
Благодаря единственному датчику Холла или угловому датчику в сочетании с логикой управления синхронные двигатели переменного тока могут получать выгоду от постоянного контроля положения ротора. Поскольку коммутация является непрерывной, синхронный двигатель переменного тока может работать без колебаний крутящего момента. Однако коммутация синуса требует более сложных алгоритмов управления, чем трапецеидальная коммутация.
Хотя конструкция очень последовательна, разница между постоянным током и обратной ЭДС в бесщеточных двигателях постоянного тока и переменного тока с постоянными магнитами является важной разницей. С точки зрения управления и производительности очень важным фактором является применение соответствующего постоянного тока и управления.
С точки зрения управления и производительности очень важным фактором является применение соответствующего постоянного тока и управления.
PREV:Как подключить шаговый двигатель?NEXT:Бесщеточный DC увеличивает производительность и снижает затраты
Related Products
25W-80мм DC мотор-редуктор со спиральной конической щеткой с прямым углом
25W-80мм DC червячный двигатель с прямым углом мотор-редуктора
40W-80mm DC спиральный конический мотор-редуктор с угловой щеткой
40W-80mm DC червячный мотор с прямым углом щеточного редуктора
40W-90mm DC спиральный конический мотор-редуктор с угловой щеткой
40W-90мм DC червячный двигатель с прямым углом мотор-редуктор
60W-90мм DC спиральный конический мотор-редуктор с угловой щеткой
60W-90мм DC червячный двигатель с прямым углом мотор-редуктора
90W-90мм DC спиральный конический мотор-редуктор с угловой щеткой
90W-90мм постоянного тока червячная передача с прямым углом мотор-редуктор с щеткой
Инструменты с батарейным питанием и бесщеточными двигателями постоянного тока.
В статье рассматриваются основные требования к электроинструментам. Предлагается комплексное решение, базирующееся на компонентах производства компании Infineon Technologies.
ВВЕДЕНИЕ
Инструменты с батарейным питанием становятся все более востребованными не только у профессионалов, но и у любителей мастерить своими руками. Эти инструменты портативны, просты в применении, обеспечивает высокую электробезопасность, а установленные бесщеточные двигатели постоянного тока (BLDC) делают их во многом универсальными. Тем не менее производителям приходится решать задачи по уменьшению массогабаритных показателей инструментов, а также продлевать срок службы батарей.
Одна из главных особенностей устройств с батарейным питанием -управление электродвигателем, характеристики которого обеспечивают требуемую функциональность. В статье рассматриваются проблемы, решение которых позволяет создать электроинструменты, отвечающие актуальным задачам, и обсуждается роль высокоинтегрированных компонентов в этих приборах.
РЫНОК ЭЛЕКТРОИНСТРУМЕНТОВ
Продажи электроинструментов высоки и постоянно увеличиваются. По оценке консалтинговой компании Future Market Insights, в 2015 г. рынок электроинструментов составлял 27 млрд долл., а в 2025 г. ожидается повышение объема рынка до 45 млрд долл. Причем, ежегодный рост рынка за период 2021-2030 гг. составит 5,1%. Этому способствуют многие факторы, к которым относятся благоприятные обстоятельства в строительной промышленности.
В связи с увеличением стоимости переезда при смене жилья многие владельцы предпочитают улучшать жилищные условия своими силами, в частности за счет ремонта, а не смены квартиры. Пандемия в еще большей мере ускорила этот процесс — люди вынуждены проводить больше времени дома, и у них появилась возможность модернизировать свои жилища. Возрастает удельный вес электроинструментов и в промышленности: их все чаще используют на сборочных линиях для повышения эффективности и уменьшения времени сборки.
К основным преимуществам использования электроинструмента в промышленных и домашних условиях относятся его удобство, безопасность и портативность. Немалую роль играет и отсутствие сетевого шнура, о который можно зацепиться. К тому же, он ограничивает перемещение пользователя.
Прежде в таких инструментах устанавливались стандартные двигатели постоянного тока с коллекторно-щеточным узлом и аккумуляторные батареи NiCd или NiMH, что создавало определенные ограничения из-за относительно невысокой надежности электродвигателей. Использование бесщеточных электродвигателей постоянного тока с интегрированным модулем управления значительно улучшило ситуацию и повысило надежность инструмента, а переход на питание от литиево-ионных батарей существенно увеличило время работы инструментов без подзарядки. Конструкция электроинструмента схематично показана на рисунке 1.
Рис. 1. Конструкция электроинструмента с BLDC
ОСНОВНЫЕ ПРОБЛЕМЫ РАЗРАБОТКИ ЭЛЕКТРОИНСТРУМЕНТА
У специалистов, занятых разработкой электроинструментов с батарейным питанием, две проблемы: сократить его массогабаритные показатели и увеличить время работы без подзарядки аккумуляторов. Фактически оба требования противоречат друг другу: чтобы увеличить время работы без подзарядки, необходима большая емкость и, следовательно, размер батареи. Однако при этом возрастают габариты и вес инструмента.
Фактически оба требования противоречат друг другу: чтобы увеличить время работы без подзарядки, необходима большая емкость и, следовательно, размер батареи. Однако при этом возрастают габариты и вес инструмента.
Устранить это противоречие способен электродвигатель BLDC: его КПД и надежность выше, чем у простого двигателя постоянного тока, из-за отсутствия коллекторно-щеточного узла. Двигателям BLDC не требуются ни щетки, ни коллектор, а значит, отсутствуют потери на трение и механический износ. К тому же, габариты BLDC-двигателей меньше при той же мощности. К сожалению, они дороже и ими сложнее управлять.
Поскольку профессиональным пользователям инструменты требуются в течение всего рабочего дня, при проектировании немало внимания следует уделять эргономике. Инструмент должен удобно лежать в руке. Необходимо тщательно продумать его компоновку, размещение батареи и двигателя. Кроме того, инструмент должен быть ударо-и виброустойчив, ведь при работе он постоянно подвергается подобным механическим воздействиям.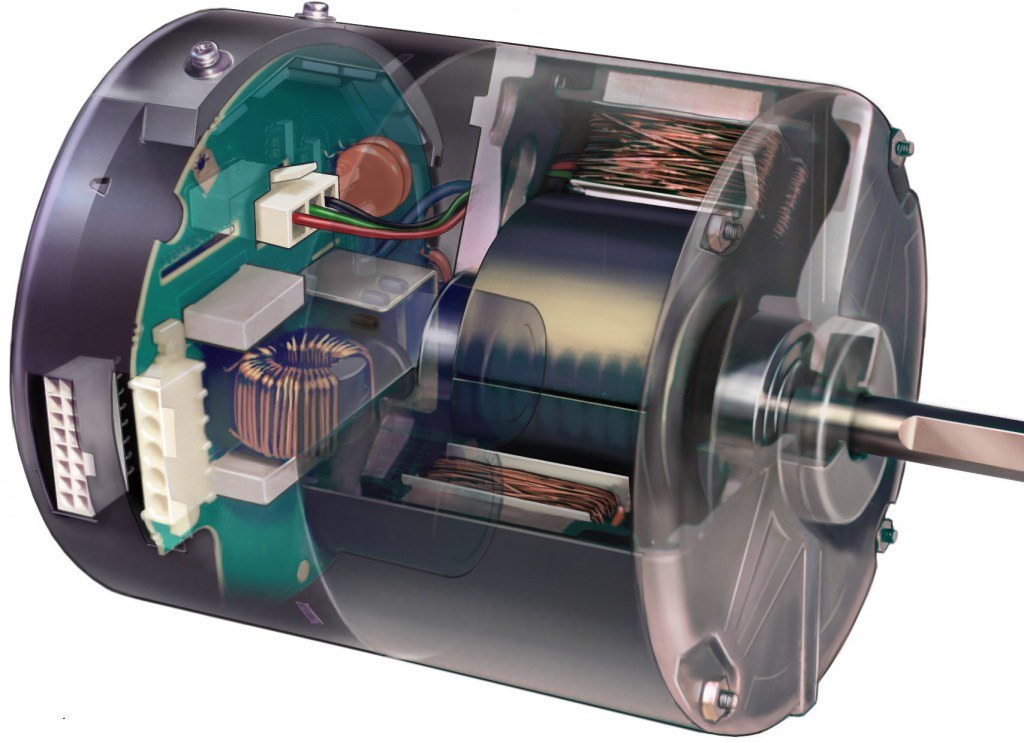 Его требуется надежно защитить от проникновения влаги и пыли, а такая защита ухудшает охлаждение. соответственно, рассеиваемая мощность электропривода инструмента должна быть как можно меньше. И наконец, ненадежный в эксплуатации инструмент нанесет ущерб репутации компании и приведет к финансовым потерям.
Его требуется надежно защитить от проникновения влаги и пыли, а такая защита ухудшает охлаждение. соответственно, рассеиваемая мощность электропривода инструмента должна быть как можно меньше. И наконец, ненадежный в эксплуатации инструмент нанесет ущерб репутации компании и приведет к финансовым потерям.
ОСНОВНЫЕ УЗЛЫ ЭЛЕКТРОИНСТРУМЕНТА
К основным узлам электроинструмента относятся аккумуляторные батареи, схема управления электроприводом, электродвигатель, схема защиты электродвигателя и микроконтроллер (мк), который нередко входит в состав схемы управления. в большинстве случаев аккумулятор съемный и заряжается от внешнего зарядного устройства.
Частота питающего напряжения электродвигателей BLDC обычно регулируется силовым трехфазным инвертором, который управляется ШИм-последовательностью, формируемой микроконтроллером. каждая из трех статорных обмоток BLDC подключается к одной из фаз инвертора; фазы напряжения инвертора сдвинуты на 120° друг относительно друга, измерения выполняются с помощью трех датчиков Холла. существуют два подхода к формированию ШИм-последовательности. в первом случае мк формирует однофазный ШИм-сигнал, а фазовый сдвиг и направление вращения двигателем осуществляется с помощью дополнительных линий порта ввода/вывода. во втором случае мк формирует трехфазную последовательность для прямого управления инвертором.
существуют два подхода к формированию ШИм-последовательности. в первом случае мк формирует однофазный ШИм-сигнал, а фазовый сдвиг и направление вращения двигателем осуществляется с помощью дополнительных линий порта ввода/вывода. во втором случае мк формирует трехфазную последовательность для прямого управления инвертором.
В составе схемы защиты предусмотрены операционные усилители или аналоговые компараторы, измеряющие токи фаз и температуру BLDC-двигателя. выходные сигналы схемы защиты могут непосредственно воздействовать на режим работы электродвигателя, но чаще они поступают в мк, который обеспечивает безопасную работу двигателя. конечно, можно создать систему управления электроприводом из отдельных компонентов, но она окажется довольно громоздкой и сложной, поэтому разработчики предпочитают использовать интегрированное решение.
КОМПОНЕНТЫ КОМПАНИИ INFINEON TECHNOLOGIES ДЛЯ СОЗДАНИЯ ЭЛЕКТРОИНСТРУМЕНТА
Одно из последних изделий компании — высокоинтегрированная микросхема 6EDL7141, которая предназначена для управления трехфазным электроприводом в приложениях с аккумуляторным питанием. Она содержит все основные компоненты для создания электропривода инструмента. ЕЕ основу составляет программируемый полумостовой драйвер затвора трехфазного инвертора с настраиваемым «мертвым» временем, напряжением и током затвора.
Она содержит все основные компоненты для создания электропривода инструмента. ЕЕ основу составляет программируемый полумостовой драйвер затвора трехфазного инвертора с настраиваемым «мертвым» временем, напряжением и током затвора.
На рисунке 2 приведены структурные схемы включения 6EDL7141 для разных режимов управления электродвигателем BLDC. кроме того, реализованы три режима торможения (верхнее плечо, нижнее плечо и переменный). драйверы могут настраиваться на работу с разными MOSFET; при этом не требуется вводить резисторы в цепь затворов или дополнительные диоды, что уменьшает число внешних компонентов.
Рис. 2. Управление электродвигателем BLDC: а) в режиме 6 ШИМ; б) в режиме 1 ШИМ с датчиками Холла; в) в режиме 3 ШИМ и в режиме 1 ШИМ без датчиков Холла
В 6EDL7141 встроены три компаратора, к которым можно подключить датчики Холла, и три операционных усилителя с регулируемым усилением и смещением, которые можно использовать в схеме защиты двигателя для повышения надежности системы. понижающий DC/DC-преобразователь расширяет диапазон входного напряжения до 5,5-70 В при максимальном выходном токе 600 мА, а LDO-стабилизаторы формируют напряжение питания системы с током потребления до 300 мА. В составе силового каскада имеются драйверы затвора верхнего и нижнего плечей и зарядовые насосы для питания драйверов.
понижающий DC/DC-преобразователь расширяет диапазон входного напряжения до 5,5-70 В при максимальном выходном токе 600 мА, а LDO-стабилизаторы формируют напряжение питания системы с током потребления до 300 мА. В составе силового каскада имеются драйверы затвора верхнего и нижнего плечей и зарядовые насосы для питания драйверов.
Микросхема 6EDL7141 отвечает требованиям стандартов электромагнитной совместимости. Тем не менее предусмотрена возможность изменения скорости нарастания выходного сигнала для снижения уровня электромагнитных помех. Структурная схема 6EDL7141 приведена на рисунке 3.
Рис. 3. Структурная схема 6EDL7141
MOSFET СЕМЕЙСТВА OPTIMOS 6 ДЛЯ ЭЛЕКТРОИНСТРУМЕНТОВ
Итак, микросхему 6EDL7141 можно настроить для работы с любыми MOSFET, но оптимальным вариантом являются MOSFET BSC007N04LS6 от компании Infineon Technologies. Эти 40-В MOSFET принадлежат к семейству OptiMOS 6, а их сопротивление открытого канала RDS(ON) = 0,7 мОм считается лучшим в своем классе. Следует обратить внимание и на отличные переключательные характеристики за счет низкой величины суммарного заряда затвора QG. Приведенные характеристики наряду с максимально допустимой температурой перехода 175°C и способностью рассеивать мощность 180 Вт делают эти силовые ключи хорошим выбором для использования в самых сложных электроинструментах.
Следует обратить внимание и на отличные переключательные характеристики за счет низкой величины суммарного заряда затвора QG. Приведенные характеристики наряду с максимально допустимой температурой перехода 175°C и способностью рассеивать мощность 180 Вт делают эти силовые ключи хорошим выбором для использования в самых сложных электроинструментах.
Показатель качества QG х RDS(ON) MOSFET семейства OptiMOS 6 улучшен на 29% по сравнению с MOSFET предыдущего поколения, а величина QGD х RDS(ON) — на 46%. Такие параметры обеспечивают необходимую эффективность электроинструмента. MOSFET BSC007N04LS6 выпускаются в 8-выводном корпусе для поверхностного монтажа SuperSO8 (см. рис. 4) размером 5х6 мм и легко встраиваются в конструктив электроинструмента.
Рис. 4. MOSFET BSC007N04LS6 семейства OptiMOS 6
ПОДДЕРЖКА РАЗРАБОТКИ
Микросхема 6EDL7141 легко конфигурируется и настраивается с помощью графического интерфейса пользователя (GUI) и входит в программное обеспечение от Infineon, которое находится в свободном доступе. Интуитивно понятный интерфейс позволяет выбрать параметры системы из всплывающих меню и сохранить параметры конфигурации в отдельном файле, а также создать прошивку управления электроприводом, которую затем можно загрузить в МК через встроенный интерфейс SPI.
Интуитивно понятный интерфейс позволяет выбрать параметры системы из всплывающих меню и сохранить параметры конфигурации в отдельном файле, а также создать прошивку управления электроприводом, которую затем можно загрузить в МК через встроенный интерфейс SPI.
С помощью GUI можно контролировать состояние 6EDL7141 и содержимое его регистров в процессе работы, что делает его в высшей степени полезным при разработке и отладке. Вскоре в помощь разработчику компания начнет производить оценочную плату (EVAL_6EDL7141_TRAP_1SH), показанную на рисунке 5. Она оптимизирована для питания от 18-В батарей и реализует трапециевидную форму напряжения питания BLDC-двигателей. Для приобретения платы рекомендуется связаться со службой технической поддержки компании.
Рис. 5. Оценочная плата (EVAL_6EDL7141_TRAP_1SH)
В состав платы входят шесть MOSFET BSC007N04LS6, которые позволяют увеличить мощность управляемого двигателя BLDC. При необходимости на плату для них устанавливаются радиаторы. система управления базируется на мк XMC1400 компании Infineon. в ее состав входит отладчик, подключаемый к компьютеру через порт USB. Исходный код мк создан в интегрированной среде Eclipsebased DE, DAVE. с помощью платы EVAL_6EDL7141_TRAP_1SH удобно оценить возможности системы управления с использованием 6EDL7141 и мк XMC1400, а также отладить алгоритмы управления с функциями, встроенными специально для использования в электроинструменте.
При необходимости на плату для них устанавливаются радиаторы. система управления базируется на мк XMC1400 компании Infineon. в ее состав входит отладчик, подключаемый к компьютеру через порт USB. Исходный код мк создан в интегрированной среде Eclipsebased DE, DAVE. с помощью платы EVAL_6EDL7141_TRAP_1SH удобно оценить возможности системы управления с использованием 6EDL7141 и мк XMC1400, а также отладить алгоритмы управления с функциями, встроенными специально для использования в электроинструменте.
ВЫВОДЫ
Многие пользователи предпочитают инструменты с батарейным питанием благодаря их портативности, мобильности и безопасности. после того как в электроинструментах стали использоваться литиево-ионные батареи и электродвигатели BLDC, они практически сравнялись по характеристикам с сетевыми инструментами.
При проектировании электроинструментов разработчикам приходится решить несколько проблем: создать удобное в использовании изделие с длительным временем работы без подзарядки батарей и придерживаться ограничений по размеру и весу инструмента. кроме того, электродвигатели BLDC хотя и легче, но управлять ими сложнее.
кроме того, электродвигатели BLDC хотя и легче, но управлять ими сложнее.
Преодолеть все препоны можно только с помощью высокоинтегрированного решения. в составе недавно выпущенной микросхемы управления трехфазным двигателем 6EDL7141 компании Infineon предусмотрено большинство элементов схемы управления электроинструментом. силовые MOSFET не входят в состав 6EDL7141, что позволяет подобрать оптимальные MOSFET из семейства OptiMOS для решения разных задач.
Совместно с 6EDL7141 используется мк семейства XMC; при этом для проектирования всего изделия применяется среда разработки DAVE IDE, также в свободном доступе имеется графический интерфейс пользователя, облегчающий настройку, конфигурирование и отладку всего решения.
Поскольку рынок электроинструментов демонстрирует стабильный рост, компания Infineon продолжает инвестировать в разработку комплексных решений для него. продукция, которая появится в ближайшее время, будет иметь более высокий уровень интеграции и работать с более высоким батарейным напряжением.
Опубликовано в журнале «Электронные Компоненты», №10, 2021
Бесщеточный мотор постоянного тока
Содержание
- Общие сведения, устройство, сфера применения
- Принцип работы
- Отличия коллекторного и бесколлекторного двигателя
- Как запустить бесколлекторный двигатель?
- Управление бесколлекторным двигателем
- Трёхфазный бесколлекторный электродвигатель постоянного тока
- Преимущества и недостатки
- Немного терминологии
- Что такое бесколлекторный двигатель?
- Преимущества и недостатки
- Что происходит в регуляторе бесколлекторного двигателя?
- Датчики положения, двигатели без датчиков
- В каких случаях применяют бесколлекорные двигатели с датчиками, а в каких – без датчиков? В чем их отличие?
- Три фазы
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
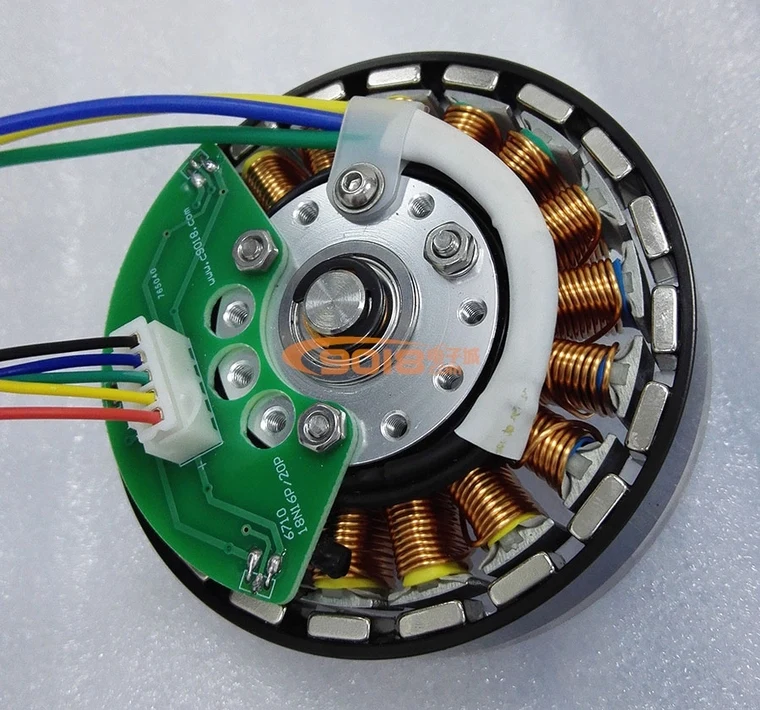
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
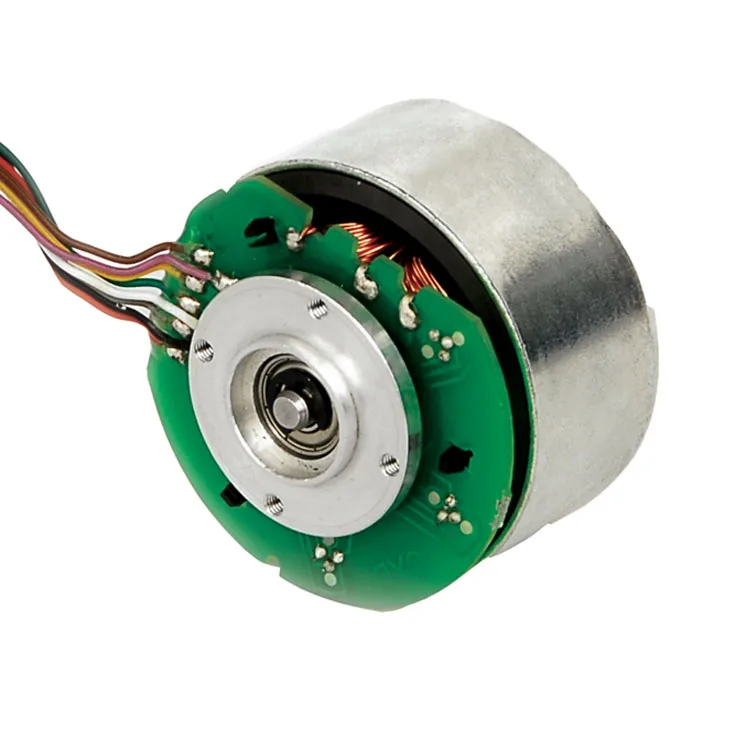
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Бесколлекторный двигатель в компьютерном дисководе
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Фазы работы бесколлекторного привода
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.

Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.

В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
BLDC (Brushless Direct Current) – Бесщёточные электродвигатели постоянного тока , либо по другому, бесколлекторные электродвигатели постоянного тока.
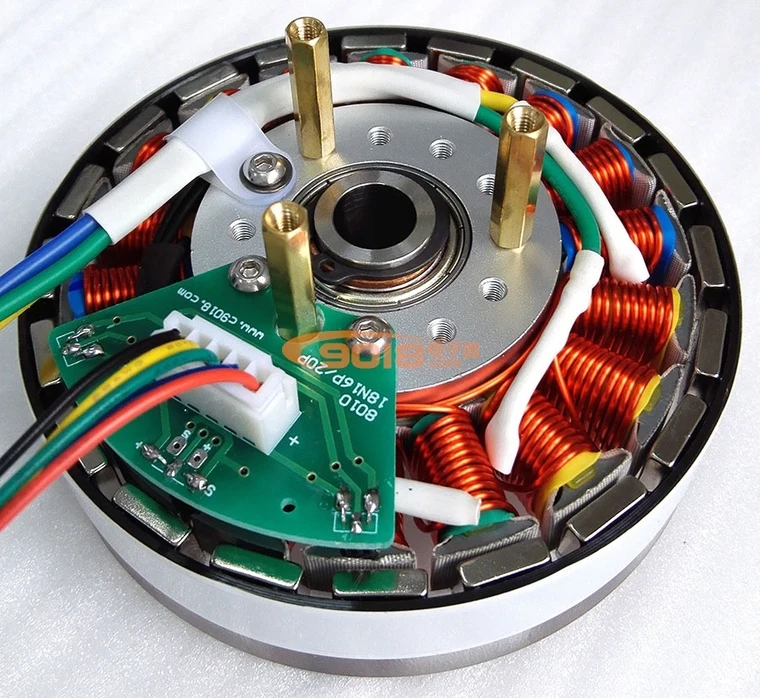
Мотор относится к классу вентильных двигателей: бесконтактный двигатель постоянного тока с возбуждением от постоянных магнитов (неодим-железо-бор). Определение положения ротора в любой момент времени обеспечивают 3 датчика Холла (для сенсорных контроллеров управления).
Применяются моторы в приводах электротранспорта: электромотоциклах, электроавтомобилях и т.п.
Питаются от источников постоянного тока 48В, 60В, 72В, 96В, 120В. Для работы требуется контроллер, соответствующей мощности.
Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Доступным языком опишу общие сведения, устройство, алгоритмы управления бесколлекторным двигателем. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Опишу устройство и алгоритм работы регулятора, методику выбора силовых ключей и основных параметров регулятора. Логическим завершением публикаций будет схема регулятора.
Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей. Также немаловажную роль сыграло появление мощных неодимовых магнитов.
Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
Немного терминологии
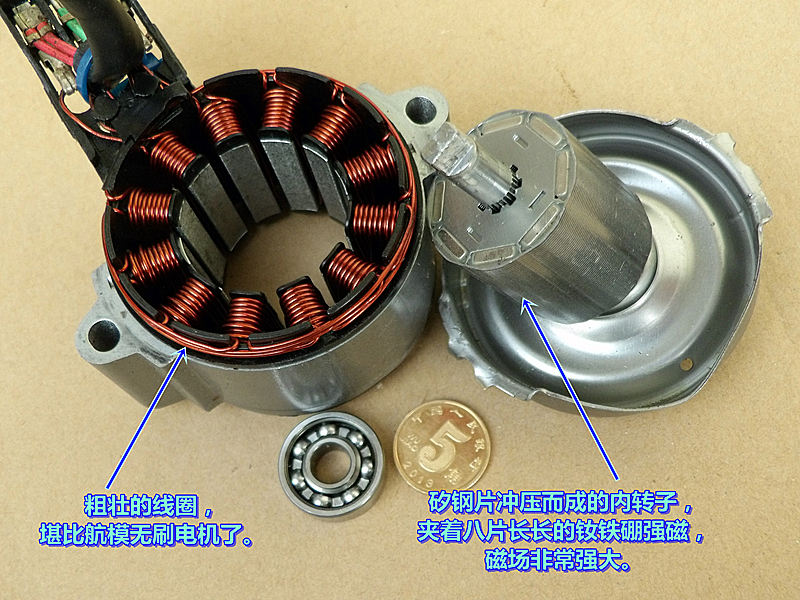
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому, далее в тексте ротор – магниты, статор – обмотки.
Для управления двигателем применяется электронный регулятор. В зарубежной литературе Speed Controller или ESC (Electronic speed control).
Что такое бесколлекторный двигатель?
Попробуем разобраться, что собой представляет бесколлекторный двигатель постоянного тока (Brushles Direct Current Motor). В самой этой фразе уже кроется ответ – это двигатель постоянного тока без коллектора. Функции коллектора выполняет электроника.
Функции коллектора выполняет электроника.
Преимущества и недостатки
Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники – просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
Что происходит в регуляторе бесколлекторного двигателя?
То же самое делает и электроника, управляющая бесколлекторным двигателем – в нужные моменты подключает постоянное напряжение на нужные обмотки статора.
Датчики положения, двигатели без датчиков
Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Эти методы также будут рассмотрены позднее. Следует обратить внимание на существенный момент: этот способ актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает.
Эти методы также будут рассмотрены позднее. Следует обратить внимание на существенный момент: этот способ актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает.
В каких случаях применяют бесколлекорные двигатели с датчиками, а в каких – без датчиков? В чем их отличие?
В тех случаях, когда конструктивно невозможно разместить датчики в корпусе двигателя, используют двигатели без датчиков. Конструктивно такие двигатели практически не отличаются от двигателей с датчиками. А вот электронный блок должен уметь управлять двигателем без датчиков. При этом блок управления должен соответствовать характеристикам конкретной модели двигателя.
Если двигатель должен стартовать с существенной нагрузкой на валу двигателя (электротранспорт, подъёмные механизмы и т.п.) – применяют двигатели с датчиками. Если двигатель стартует без нагрузки на валу (вентиляция, воздушный винт, применяется центробежная муфта сцепления и т. п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
Три фазы
Трехфазные бесколлекторные двигатели приобрели наибольшее распространение. Но они могут быть и одно, двух, трех и более фазными. Чем больше фаз, тем более плавное вращение магнитного поля, но и сложнее система управления двигателем. 3-х фазная система наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила столь широкое распространение. Далее будет рассматриваться только трехфазная схема, как наиболее распространенная. Фактически фазы – это обмотки двигателя. Поэтому если сказать «трехобмоточный», думаю, это тоже будет правильно. Три обмотки соединяются по схеме «звезда» или «треугольник». Трехфазный бесколлекторный двигатель имеет три провода – выводы обмоток, см. рисунок.
Трехфазный бесколлекторный двигатель имеет три провода – выводы обмоток, см. рисунок.
Двигатели с датчиками имеют дополнительных 5 проводов (2-питание датчиков положения, и 3 сигналы от датчиков).
В трехфазной системе в каждый момент времени напряжение подается на две из трех обмоток. Таким образом, есть 6 вариантов подачи постоянного напряжения на обмотки двигателя, как показано на рисунке ниже.
Это позволяет создать вращающееся магнитное поле, которое будет проворачиваться «шагами» на 60 градусов при каждом переключении. Но не будем забегать наперед. В следующей статье будут рассмотрены устройство бесколлекторного двигателя, варианты расположения магнитов, обмоток, датчиков и т.д., а позже будут рассмотрены алгоритмы управления бесколлекторными двигателями.
Бесколлекторные моторы «на пальцах» Что такое бесколлекторные моторы и как управлять бесколлекторными моторами:
Бесщеточные двигателипротив щеточных двигателей
Двигатель постоянного тока — одна из самых фундаментальных машин за последние 200 лет. Этот электродвигатель использует постоянный ток для создания вращательного движения и позволил разработчикам создавать электроинструменты, мобильное оборудование, компьютерные компоненты и другие бесценные устройства с батарейным питанием. Они представляют собой класс, отличный от двигателей переменного тока, которые столь же многочисленны, но имеют другие преимущества (узнайте больше в нашей статье о синхронных двигателях и асинхронных двигателях). Класс двигателей постоянного тока широко разделен на коллекторные двигатели постоянного тока и бесщеточные двигатели постоянного тока, и эта статья поможет тем, кто хочет понять, что отличает один двигатель постоянного тока от другого. Будут объяснены основные принципы, лежащие в основе обоих типов двигателей постоянного тока, а затем будет проведено их сравнение, чтобы показать, где каждая машина работает лучше всего в промышленности.
Этот электродвигатель использует постоянный ток для создания вращательного движения и позволил разработчикам создавать электроинструменты, мобильное оборудование, компьютерные компоненты и другие бесценные устройства с батарейным питанием. Они представляют собой класс, отличный от двигателей переменного тока, которые столь же многочисленны, но имеют другие преимущества (узнайте больше в нашей статье о синхронных двигателях и асинхронных двигателях). Класс двигателей постоянного тока широко разделен на коллекторные двигатели постоянного тока и бесщеточные двигатели постоянного тока, и эта статья поможет тем, кто хочет понять, что отличает один двигатель постоянного тока от другого. Будут объяснены основные принципы, лежащие в основе обоих типов двигателей постоянного тока, а затем будет проведено их сравнение, чтобы показать, где каждая машина работает лучше всего в промышленности.
Коллекторные двигатели
Коллекторные двигатели постоянного тока (часто называемые просто «щеточными двигателями») являются одними из старейших электродвигателей и используют постоянный ток с механической коммутацией для выработки механической энергии.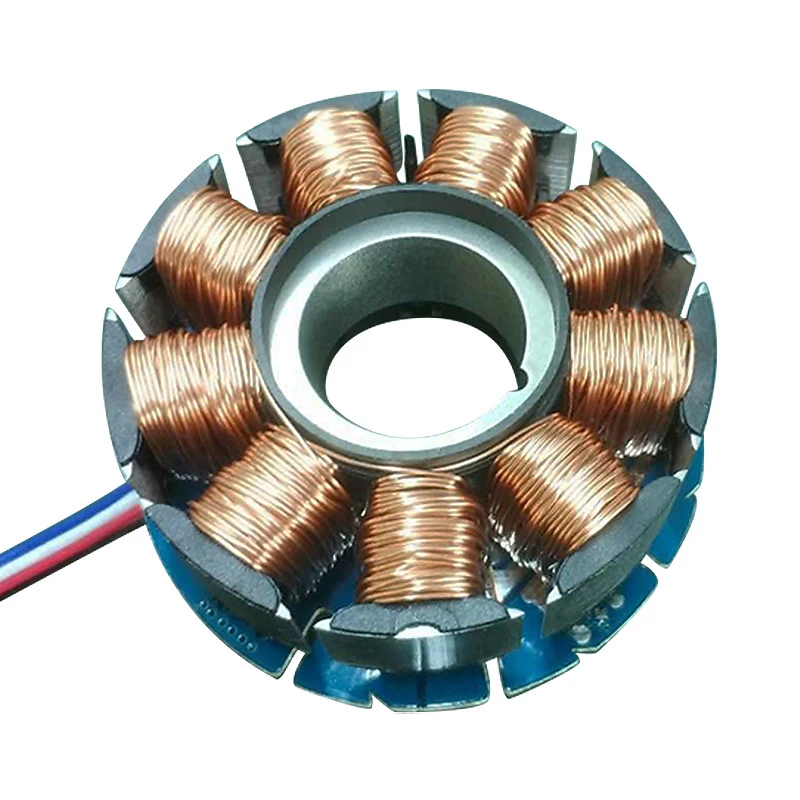 Легче всего понять, как работает коллекторный двигатель, показав его различные компоненты, а на рисунке 1 показана принципиальная принципиальная схема коллекторных двигателей:
Легче всего понять, как работает коллекторный двигатель, показав его различные компоненты, а на рисунке 1 показана принципиальная принципиальная схема коллекторных двигателей:
.
Рис. 1: Принципиальная принципиальная схема коллекторных двигателей постоянного тока. Обратите внимание, что поле статора не обязательно подключено к цепи; его источник питания и ориентация — основное различие между коллекторными и бесщеточными двигателями постоянного тока.
Эти двигатели, как следует из их названия, используют щетки для подключения источника питания постоянного тока к узлу ротора, который является компонентом двигателя, содержащим якорь, коллекторные кольца и выходной вал. Статор или внешний корпус двигателя содержит поле постоянного магнита, создаваемое либо постоянным магнитом, либо некоторой неподвижной катушкой электромагнита (показанной на рисунке 1 как «поле статора»). Постоянное магнитное поле имеет полюса (магнитные пары север-юг), и их линии магнитного поля постоянно проходят через весь узел ротора. Этот узел получает питание, когда щетки пережимают кольца коммутатора, направляющие ток через якорь и его обмотки. При прохождении тока через эти катушки якорь становится собственным электромагнитом и взаимодействует с постоянными полюсами поля статора. Поскольку узел ротора может свободно вращаться, поле, создаваемое якорем, будет отталкивать поле статора, вызывая вращение вала. Это вращение пропорционально токам возбуждения якоря и статора, и изменение этих токов приведет к изменению выходных характеристик.
Этот узел получает питание, когда щетки пережимают кольца коммутатора, направляющие ток через якорь и его обмотки. При прохождении тока через эти катушки якорь становится собственным электромагнитом и взаимодействует с постоянными полюсами поля статора. Поскольку узел ротора может свободно вращаться, поле, создаваемое якорем, будет отталкивать поле статора, вызывая вращение вала. Это вращение пропорционально токам возбуждения якоря и статора, и изменение этих токов приведет к изменению выходных характеристик.
Рисунок 1 намеренно нечетко показывает, как подключено поле статора; это связано с тем, что в некоторых типах двигателей постоянного тока обмотки возбуждения статора соединяются по-разному, чтобы создавать разные эффекты двигателя. Чтобы узнать об этих вариантах, ознакомьтесь с нашими статьями о двигателях постоянного тока с последовательной обмоткой и шунтирующих двигателях постоянного тока.
Двигатели постоянного тока
относительно недороги, просты в управлении и ремонте и выпускаются в сотнях форм, идеально подходящих для многих условий, особенно экстремальных. Некоторые коллекторные двигатели также могут питаться от переменного тока, например, универсальные двигатели, что придает этим машинам дополнительную универсальность в применении. Несмотря на это, коллекторные двигатели широко используются уже много лет, и, хотя они не такие сложные, как некоторые более новые двигатели, они по-прежнему обеспечивают мощность для многих приложений сегодня.
Некоторые коллекторные двигатели также могут питаться от переменного тока, например, универсальные двигатели, что придает этим машинам дополнительную универсальность в применении. Несмотря на это, коллекторные двигатели широко используются уже много лет, и, хотя они не такие сложные, как некоторые более новые двигатели, они по-прежнему обеспечивают мощность для многих приложений сегодня.
Бесщеточные двигатели постоянного тока
В отличие от щеточных двигателей, бесщеточные двигатели постоянного тока (двигатели BLDC), что неудивительно, не создают движение с помощью щеток. Вместо этого они берут постоянное магнитное поле, обычно находящееся в статоре коллекторного двигателя, и помещают его вокруг ротора в виде настоящих магнитов. Статоры двигателей BLDC состоят из электромагнитных катушек (попарно расположенных вокруг ротора), которые электрически включаются и выключаются с помощью электрической системы управления. При включении пара полюсов будет притягивать постоянные полюса ротора, заставляя его поворачиваться в исходное положение. Если полюса статора включаются и выключаются последовательно, то оператор может заставить ротор вращаться с некоторой желаемой частотой; другими словами, электрическое включение и выключение полюсов статора заставит ротор вращаться, создавая механическую энергию. Эта электрическая коммутация имитирует вращающееся магнитное поле (RMF), присутствующее в типичных трехфазных двигателях переменного тока, но позволяет пользователю задавать скорость двигателя, крутящий момент и положение двигателя BLDC. Операторам предоставляется диапазон полезных скоростей и крутящих моментов, синхронизированных с входной частотой, посредством регулировки величины и направления постоянного тока, протекающего через катушки статора.
Если полюса статора включаются и выключаются последовательно, то оператор может заставить ротор вращаться с некоторой желаемой частотой; другими словами, электрическое включение и выключение полюсов статора заставит ротор вращаться, создавая механическую энергию. Эта электрическая коммутация имитирует вращающееся магнитное поле (RMF), присутствующее в типичных трехфазных двигателях переменного тока, но позволяет пользователю задавать скорость двигателя, крутящий момент и положение двигателя BLDC. Операторам предоставляется диапазон полезных скоростей и крутящих моментов, синхронизированных с входной частотой, посредством регулировки величины и направления постоянного тока, протекающего через катушки статора.
Хотя двигатели BLDC проще по конструкции, они требуют электрической коммутации, а не механической коммутации, как в щеточных двигателях. Они должны постоянно использовать датчики для определения углового положения выходного вала и использовать контроллер для переключения тока в нужное время. Электрическая коммутация увеличивает сложность этих двигателей, но также снижает потребность в обслуживании щеток, повреждения от трения и нежелательную вибрацию/шум, которые часто встречаются в щеточных двигателях. Кроме того, они гораздо более эффективны, обладают высокой динамической реакцией и работают на разных скоростях, что делает их особенно подходящими для непрерывных приложений с регулируемой скоростью. Чтобы узнать больше об этих двигателях, прочитайте нашу статью о бесщеточных двигателях постоянного тока.
Электрическая коммутация увеличивает сложность этих двигателей, но также снижает потребность в обслуживании щеток, повреждения от трения и нежелательную вибрацию/шум, которые часто встречаются в щеточных двигателях. Кроме того, они гораздо более эффективны, обладают высокой динамической реакцией и работают на разных скоростях, что делает их особенно подходящими для непрерывных приложений с регулируемой скоростью. Чтобы узнать больше об этих двигателях, прочитайте нашу статью о бесщеточных двигателях постоянного тока.
Сравнение бесщеточных и коллекторных двигателей постоянного тока
В этой статье будут сравниваться некоторые категории, общие для обоих типов двигателей постоянного тока, чтобы показать явные преимущества каждой конструкции. Таблица 1 показывает эти сравнения; обратите внимание, что они являются обобщенными, поскольку оба этих типа двигателей бывают разных размеров, и поэтому их трудно сравнивать в цифрах.
Таблица 1: Сравнение коллекторных и бесщеточных двигателей.

Характеристики | Коллекторные двигатели | Бесщеточные двигатели |
Сложность | Простой | Комплекс |
Кривая скорости/крутящего момента | Умеренно плоский/линейный | Плоский/линейный |
Плотность мощности | В среднем | Высокий |
Эффективность | В среднем | Высокий |
Диапазон скоростей | Низкий/Нет | Высокий |
Срок службы | В среднем | Длинный |
Стоимость | Низкий | Высокий |
Сложность двигателей BLDC увеличивает как их рабочие характеристики, так и их стоимость. Хотя из таблицы 1 видно, что двигатели BLDC превосходят щеточные двигатели почти во всех категориях, это происходит потому, что они используют сложные электрические контроллеры, которые резко увеличивают их цену. Кроме того, несмотря на то, что они имеют более высокий средний срок службы, чем щеточные двигатели, из-за отсутствия обслуживания щеток, их сложнее и дороже ремонтировать, когда они все же выходят из строя из-за их сложности. Покупатели должны определить, повлияет ли сложность двигателя постоянного тока на их проект негативно.
Хотя из таблицы 1 видно, что двигатели BLDC превосходят щеточные двигатели почти во всех категориях, это происходит потому, что они используют сложные электрические контроллеры, которые резко увеличивают их цену. Кроме того, несмотря на то, что они имеют более высокий средний срок службы, чем щеточные двигатели, из-за отсутствия обслуживания щеток, их сложнее и дороже ремонтировать, когда они все же выходят из строя из-за их сложности. Покупатели должны определить, повлияет ли сложность двигателя постоянного тока на их проект негативно.
Кривая скорость/крутящий момент двигателя показывает реакцию крутящего момента в зависимости от скорости. Для двигателей постоянного тока эта кривая обычно представляет собой прямую линию, что означает, что крутящий момент линейно зависит от скорости. Двигатели BLDC и их кривые крутящего момента/скорости чрезвычайно линейны, поскольку их электрическая коммутация позволяет более точно контролировать скорость и крутящий момент.
Удельная мощность двигателя описывает его номинальную мощность в л. с. или кВт по сравнению с его геометрическим объемом. Это значение полезно для приложений, которые требуют высокой скорости/крутящего момента в небольшом корпусе (например, электроинструменты, стиральные машины и т. д.). Двигатели BLDC имеют более высокую удельную мощность, поскольку они обеспечивают высокий крутящий момент в состоянии покоя, который можно поддерживать более эффективно, чем в коллекторных двигателях постоянного тока.
с. или кВт по сравнению с его геометрическим объемом. Это значение полезно для приложений, которые требуют высокой скорости/крутящего момента в небольшом корпусе (например, электроинструменты, стиральные машины и т. д.). Двигатели BLDC имеют более высокую удельную мощность, поскольку они обеспечивают высокий крутящий момент в состоянии покоя, который можно поддерживать более эффективно, чем в коллекторных двигателях постоянного тока.
Щетки и механические коллекторные кольца снижают общий КПД щеточных двигателей, так как больше энергии теряется на нагрев и трение. В двигателях BLDC эти детали не используются, и в результате они более эффективно преобразуют постоянный ток в механическую энергию. Их электрические схемы управления также могут оптимизировать энергопотребление, что позволяет экономить энергию на двигателе, когда он не используется или в приложениях с низким энергопотреблением.
Диапазон скоростей коллекторных двигателей постоянного тока не сравним с тем, что может обеспечить двигатель BLDC. В то время как щеточные двигатели имеют различные диапазоны скоростей, электрическая коммутация, присутствующая в двигателях BLDC, позволяет им обеспечивать гораздо больший диапазон скоростей.
В то время как щеточные двигатели имеют различные диапазоны скоростей, электрическая коммутация, присутствующая в двигателях BLDC, позволяет им обеспечивать гораздо больший диапазон скоростей.
Щёточные двигатели обычно имеют номинальный срок службы щёток, чтобы операторы знали, когда их необходимо заменить. Поскольку в них используются механические коммутаторы и щетки, существует риск искрения, а также выхода из строя, что сокращает срок службы щеточных двигателей. Двигатели BLDC служат намного дольше, так как нет трения или необходимости периодического обслуживания, а также нет риска искрения. Срок службы щеточных двигателей можно увеличить за счет частых профилактических или плановых проверок технического обслуживания, но они могут быть утомительными, когда существует практически не требующая обслуживания альтернатива. Хотя оба типа двигателей считаются надежными, двигатели BLDC имеют меньший риск отказа.
Может показаться, что щеточные двигатели просто худший вариант, чем двигатели BLDC, и это была бы правильная оценка, если бы не цена. Коллекторные двигатели не только намного дешевле в расчете на единицу, чем двигатели BLDC того же размера, но и затраты на их установку также довольно низкие. Коллекторные двигатели также не требуют электрических систем управления, которые часто дороже, чем двигатели BLDC, для которых они требуются. Таким образом, хотя двигатели BLDC в целом обеспечивают больше преимуществ, они делают это по очень буквальной цене. Если стоимость является важной характеристикой (а она всегда должна быть такой), следует в первую очередь рассмотреть коллекторные двигатели, прежде чем рассматривать конструкции BLDC.
Коллекторные двигатели не только намного дешевле в расчете на единицу, чем двигатели BLDC того же размера, но и затраты на их установку также довольно низкие. Коллекторные двигатели также не требуют электрических систем управления, которые часто дороже, чем двигатели BLDC, для которых они требуются. Таким образом, хотя двигатели BLDC в целом обеспечивают больше преимуществ, они делают это по очень буквальной цене. Если стоимость является важной характеристикой (а она всегда должна быть такой), следует в первую очередь рассмотреть коллекторные двигатели, прежде чем рассматривать конструкции BLDC.
Оба этих двигателя бесценны в таких продуктах, как автомобили, компьютеры, игрушки, производство и многое другое, поэтому существует множество вариантов выбора двигателя постоянного тока. Просто обязательно ознакомьтесь с преимуществами и рисками использования любой из этих машин и используйте спецификации проекта, чтобы определить, какая из них подходит лучше всего.
Резюме
В этой статье представлено краткое сравнение бесщеточных двигателей постоянного тока и коллекторных двигателей постоянного тока. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- http://srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30.pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- http://www.ece.ua.edu/courses/material/EE410-Wms2/Electric%20motors.pdf
- https://www.monolithicpower.com
- https://www.top-ee.com/applications-of-dc-motor/
Другие товары для двигателей
- Типы катушек индуктивности и сердечников
- Типы контроллеров двигателей и приводов
- Типы двигателей постоянного тока
- и двигатели постоянного тока — в чем разница?
- Все об асинхронных двигателях — что это такое и как они работают
- Типы двигателей переменного тока
- Все о синхронных двигателях — что это такое и как они работают
- Понимание двигателей
- — как они работают?
- Что такое двигатель с короткозамкнутым ротором и как он работает?
- Что такое двигатель с фазным ротором и как он работает?
- Все о реактивных двигателях — что это такое и как они работают
- Все о бесщеточных двигателях постоянного тока: что это такое и как они работают
- Все о двигателях с постоянными магнитами — что это такое и как они работают
- Все о двигателях постоянного тока с обмоткой серии — что это такое и как они работают
- Все о шунтирующих двигателях постоянного тока: что это такое и как они работают
- Все о шаговых двигателях — что это такое и как они работают
- и серводвигатели — в чем разница?
- Все о контроллерах двигателей переменного тока — что это такое и как они работают
- Синхронные двигатели и асинхронные двигатели — в чем разница?
Двигатели переменного тока
Однофазные промышленные двигатели
Шаговые двигатели
Другие товары от Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Бесщеточный двигатель постоянного тока (BLDC)
По технологии
Дискретные и силовые модули
МОП-транзисторы
Силовые модули
Карбид кремния (SiC)
Все остальные
Управление питанием
Устройства с питанием от PoE
Драйверы ворот
Преобразование переменного тока в постоянный
Все остальные
Signal Conditioning & Control
Sensors
Motor Control
Custom & ASSP
Interfaces
Wireless Connectivity
Timing, Logic & Memory
By Solution
Automotive
Industrial
Cloud
5G & Enterprise
Интернет вещей (IoT)
Мобильный телефон
Узнайте больше о
Карбид кремния (SiC)
Полная экосистема компонентов для поддержки конструкций с широкополосным питанием, включая SiC-диоды, SiC-MOSFET и SiC-модули.
Просмотр продукта
Быстрые ссылки:
Новые продуктыУслуги по продуктам
Автомобильная промышленность
ADASPowertrain, Safety and SecurityBody Electronics and LED LightingTechnologyЭлектрификация транспортных средств
Промышленность
ТехнологииПромышленная автоматизацияУмные зданияЭнергетическая инфраструктура
5G и облачная энергия
Телекоммуникационная инфраструктураServer Power
Интернет вещей (IoT)
ТехнологииСвязьУправление питанием IoTПлатформы прототипирования IoTSensing
Medical
Аудиология FocusClinical Point-of-CarePortable Medical DevicesMedical Imaging Devices
Aerospace & Defense
Защита от несанкционированного доступа Active ShieldRad Hard Space & Hi-Rel ASICsRad Hard Aerospace ASIC
Товарищества
Партнерство Субару
Экосистемные партнеры
Узнайте больше о датчике дождя и света!
Датчики дождя и света представляют собой небольшие оптико-электронные модули, обычно размещаемые в зеркале заднего вида автомобиля.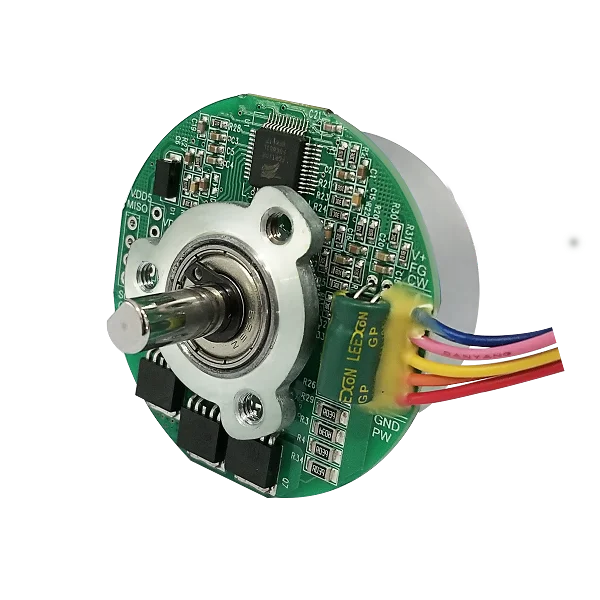
View Solution
Инструменты и ПО
Инструмент рекомендации продукта+Интерактивные блок-схемыИнструменты оценки/разработкиВеб-дизайнер+Инструменты дизайнаStrata Developer StudioSimulation/SPICE Models
Ресурсы
Библиотека видеоТехническая документацияБиблиотека ПОPower Webinars
Техническая поддержкаПоддержка продаж и распространенияЧасто задаваемые вопросы
Свяжитесь с нами
Службы поставщиков
Форумы сообщества
Bluetooth Low Energy Sub-GHz
Вам нужна техническая поддержка?
Отправить билет
Вы предпочитаете человека? Позвоните нам!
AMER: 011 421 33 790-2910
EMEA: 00421 33 790-2910
О onsemi
Качество и надежностьКорпоративный информационный бюллетеньЛидерствоПартнеры по экосистемеИнтеллектуальная собственностьМестонахождение
Экология, социальная сфера и управление
Годовой отчет об устойчивом развитииРазнообразие, равенство и инклюзивность Программа Giving NowЭтика и соблюдение нормативных требованийСоциальная ответственность
Свяжитесь с нами
События
ВебинарыВыставки
Новости и СМИ
Объявления для прессыВ новостяхБлогСМИ КонтактыБиблиотека изображений
Связи с инвесторами
СобытияУправлениеФинансыИнформация об акцияхНовостиРесурсы
Вы ищете, чем заняться? Присоединяйтесь к нам на выставке VISION!
4-6 октября 2022 г.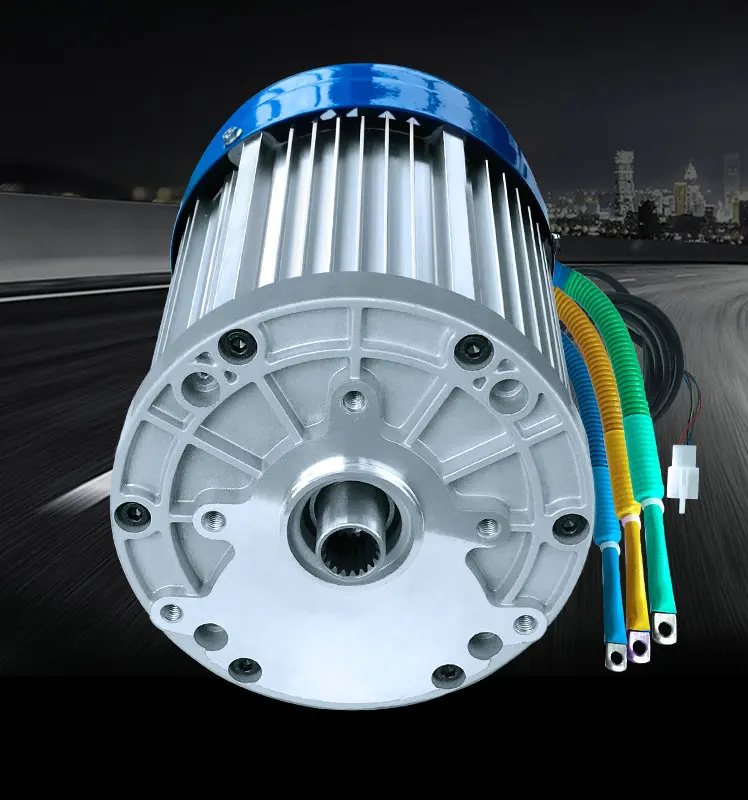
onsemi продемонстрирует свои интеллектуальные сенсорные решения для промышленных рынков. Наши специалисты будут доступны на стенде, чтобы обсудить и помочь вам в поддержке ваших приложений и задач проектирования.
Считайте меня!
Search & ApplyEarly CareersExperienced Careers
Стажировки
Подать заявку на стажировкуОтношения с университетамиЧасто задаваемые вопросы
Кто мыКарьерные преимущества
Где мы
Автомобильный
АДАС
 collapse-target-1506
collapse-target-1506просмотра
В салоне
Чувство
Переднее зондирование
Датчик дождя и света
«/>
Силовой агрегат, Безопасность
 collapse-target-150737304″/>
collapse-target-150737304″/>Модуль управления коробкой передач (TCM)
Модуль управления силовым агрегатом (PCM)
Электроника кузова и светодиодное освещение
 collapse-target-150737366″/>
collapse-target-150737366″/>ОВКВ
Усовершенствованные системы переднего освещения (AFLS)
Внешнее освещение
Внутреннее освещение
Модуль управления дверью
Модуль управления кузовным оборудованием (BCM)
Умная распределительная коробка (SJB)
Технологии
 collapse-target-150737428″/>
collapse-target-150737428″/>Семья Хаябуса
Решения для драйверов ворот
ADAS и семейство AD
Электрификация автомобиля
 collapse-target-1506
collapse-target-1506- «/>
Преобразователь постоянного тока высокого напряжения в постоянный
Быстрая зарядка электромобилей постоянным током
Вспомогательные системы электромобиля
48-вольтовый преобразователь постоянного тока в постоянный
48-вольтовый стартер-генератор
Тяговый инвертор
Бортовое зарядное устройство (OBC)
промышленный
 collapse-target-150690277″/>
collapse-target-150690277″/>
Технологии
Управление активами
Комплект для разработки двигателей (MDK)
Индустриальная автоматизация
 collapse-target-150737490″/>
collapse-target-150737490″/>Преобразование мощности
Промышленный лидар
Машинное зрение
Подключенное освещение
Управление активами
Промышленный привод
 collapse-target-150743256″/>
collapse-target-150743256″/>Двигатели переменного тока
Бесщеточный двигатель постоянного тока (BLDC)
Робототехника
Умные Здания
 collapse-target-152204782″/>
collapse-target-152204782″/>Подключенное освещение
Энергетическая инфраструктура
Быстрая зарядка электромобилей постоянным током
Хранилище энергии
Источник бесперебойного питания (ИБП)
Солнечные энергетические решения
 collapse-target-150744031″/>
collapse-target-150744031″/>Отдельная фаза
Трехфазный
5G и облачная мощь
collapse-target-152203015″/>
Телекоммуникационная инфраструктура
Радиоблок 5G
Базовая станция
Мощность сервера
collapse-target-150737459″/>
Вспомогательная мощность
Основная мощность
Блок питания стойки
Защита автобуса
Интернет вещей (IoT)
collapse-target-150690308″/>
Технологии
Платформы сбора энергии
Комплекты для разработки датчиков
Решения USB Type-C
Связь
collapse-target-150738296″/>
Питание через Ethernet (PoE)
Bluetooth с низким энергопотреблением
ЗИГБИ
Wi-Fi
Управление питанием Интернета вещей
Платформы прототипирования Интернета вещей
Чувство
collapse-target-150738389″/>
Восприятие изображения
Медицинский
Аудиологический фокус
Клинический пункт оказания медицинской помощи
Портативные медицинские приборы
Медицинские устройства визуализации
Аэрокосмическая промышленность и оборона
collapse-target-150690401″/>
Активный щит против несанкционированного доступа
Rad Hard Space и Hi-Rel ASIC
ASIC Rad Hard Aerospace
12 В 24 В 36 В 48 В Производитель бесщеточных двигателей постоянного тока (BLDC) | GEMS Motor
Наш самый большой 12-вольтовый бесконтактный двигатель постоянного тока — GM57BLY9.
5-130 (12 В, 100 Вт, 3000 об/мин, 0,33 Нм, диаметр 57 мм * длина 95 мм)
Наш самый большой двигатель постоянного тока 24 В — GM86BLF105-230 (24 В, 400 Вт, 3000 об/мин, 1,28 Нм, 80 мм * 56 мм) и*1 GM60BLF141-230 (24 В, 400 Вт, 3000 об / мин, 1,28 нм, 60 мм*60 мм*141 мм)
Наш самый большой мотор BLDC 48 В-GM110BLF170-430 (48 В, 2000 Вт, 3000RPM, 6.4NM, 110MM*110MM*17020 Мммм. GEMS Motor производит и поставляет бесщеточные двигатели с рамой NEMA 17 23 34 42 и метрическим размером 42–110 мм. Большинство наших двигателей могут быть специально разработаны для работы с напряжением 12 В, 24 В, 36 В, 48 В или выше. GEMS предлагает различные варианты смазочных материалов и двигатели класса IP65 для экстремальных температур, запыленности и влажности. Встроенные датчики Холла или энкодеры также доступны для приложений, где требуется точная обратная связь по положению и скорости. GEMS Motor также предлагает широкий ассортимент бесщеточных мотор-редукторов и бесщеточных двигателей постоянного тока со встроенным драйвером.
Двойной вал и монтажные фланцы доступны по запросу.
Бесщеточные двигатели постоянного тока, также известные как бесколлекторные двигатели постоянного тока или двигатели постоянного тока, имеют гораздо более длительный срок службы, чем щеточные двигатели постоянного тока, поскольку в них отсутствуют изнашиваемые щетки. Это дает вам лучшую долгосрочную ценность для ваших инвестиций. Еще одним важным преимуществом бесколлекторных двигателей является их высокий КПД. Бесщеточные двигатели также идеально подходят для приложений, работающих на высоких скоростях, таких как электроинструменты и бесщеточные воздуходувки. Во многих случаях бесщеточные двигатели изготавливаются многополюсными, например: 4-полюсными или 8-полюсными, что увеличивает крутящий момент за счет скорости. В таких приложениях чрезвычайно высокие обороты не требуются, но желательно иметь высокий крутящий момент. Пожалуйста, проверьте технические характеристики двигателя ниже, чтобы получить информацию о максимальной скорости и крутящем моменте.
NEMA 17, 42 мм, от 24 до 48 В, бесщеточный двигатель постоянного тока [Технический паспорт]
12 В, 24 В, 2000 об/мин 4000 об/мин ~8000 Н·дюйм-9 zO6 Н·м (высокоскоростной двигатель BLDC, 0,0000 об/мин) 36Oz-in), 13 ~ 105 watts
| Model | GM42BLF 40-128-H | GM42BLF 60-113 | GM42BLF 60-123 | GM42BLF 60-130 | GM42BLF 40-240 | GM42BLF 60-240 | GM42BLF 80-240 | GM42BLF 100-240 | GM42BLF 40-220 | GM42BLF 60-214 | GM42BLF 60-270 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Количество полюсов | 8 полюсов | ||||||||||||||||||||||
| Количество фаз | 3 фазы | ||||||||||||||||||||||
| Номинальное напряжение | Volt | 12 | 12 | 12 | 12 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | |||||||||||
| Rated speed | RPM | 3000 | 1300 | 2300 | 3000 | 4000 | 4000 | 4000 | 4000 | 2000 | 1400 | 7000 | |||||||||||
| Номинальный крутящий момент | Унц-дюйм | 8,9 | 17,7 | 17,7 | 17,7 | 8,9 | 17,7 | 26,9 | 36 | 8. 9 | 77 | 3 36 | 8.9 | 7,7 | 8.9 | 7.7 | 8.9 | 7,7 | 8.9 | 7.7 | 8.9 | 7.7 | . |
| Nm | 0.063 | 0.125 | 0.125 | 0.125 | 0.063 | 0.125 | 0.19 | 0.25 | 0.063 | 0.125 | 0.125 | ||||||||||||
| Номинальный ток | А | 2.4 | 2.5 | 4 | 5 | 1.8 | 3.5 | 5.2 | 6.6 | 0.9 | 1.3 | 6.2 | |||||||||||
| Rated power | Watt | 20 | 16 | 29 | 38 | 26 | 52 | 79 | 105 | 13 | 18 | 90 | |||||||||||
| Пиковый крутящий момент | Унц-дюйм | 26,9 | 53,1 | 53,1 | 53,1 | 26,9 | 53,1 | 80,7 | 107 | 26,9 | 53,1 | 53,1 | 53. 1 | 53,1 | 53,1 | 53,1 | |||||||
| Nm | 0.19 | 0.375 | 0.375 | 0.375 | 0.19 | 0.375 | 0.57 | 0.75 | 0.19 | 0.375 | 0.375 | ||||||||||||
| Пиковый ток | А | 7,2 | 7 | 11 | 14 | 5,4 | 10,5 | 15,6 | 20 | 2,7 | 3,9 | 03,8 | |||||||||||
| Rotor inertia | g.c㎡ | 24 | 48 | 48 | 48 | 24 | 48 | 72 | 96 | 24 | 48 | 48 | |||||||||||
| Длина L | мм | 40 | 60 | 60 | 60 | 40 | 60 | 80 | 100 | 40 | 60 | 60 | |||||||||||
| Weight | Kg | 0.33 | 0.45 | 0. 45 | 0.45 | 0.33 | 0.45 | 0.65 | 0.8 | 0.33 | 0.45 | 0.45 |
*Некоторые модели могут быть специально разработаны для источника питания 12 В 24 В 36 В или 48 В, а номинальная скорость может быть любой от 1000 об/мин до 8000 об/мин
NEMA 23, 57 мм 12 В 24 В 48 В Бесщеточный двигатель постоянного тока [Технические характеристики]
24 В, 1000 об/мин ~ 3000 об/мин, 30 унций на дюйм ~ 115 унций на дюйм (0,2 Нм ~ 0,8 Нм), 2 watts
| Model | GM57BLF59-230 | GM57BLF80-230 | GM57BLF101-230 | GM57BLF122-230 | |
|---|---|---|---|---|---|
| Количество полюсов | 8 полюсов | ||||
| Номер фазы | 3 фазы | ||||
| Номинальное напряжение | Вольт | 24 | 24 | 24 | 36 |
| Номинальная скорость | Об/мин | 3000 | 3000 | 3000 | 3000 |
| Номинальный крутящий момент | Унц-дюйм | 28,3 | 56,6 | 85 | 115 |
| Н·м | 0,2 | 0,4 | 0,6 | 0,8 | |
| Номинальный ток | А | 4 | 8 | 12 | 15 |
| Номинальная мощность | Вт | 63 | 125 | 188 | 250 |
| Пиковый крутящий момент | Унц-дюйм | 85 | 170 | 255 | 343 |
| Н·м | 0,6 | 1,2 | 1,8 | 2,4 | |
| Пиковый ток | А | 12 | 23,5 | 36 | 45 |
| Задняя ЭДС | В/КРПМ | 6. 23 | 6.3 | 6.3 | 6.3 |
| Инерция ротора | g.c㎡ | 120 | 170 | 220 | 270 |
| Длина корпуса | мм | 59 | 80 | 101 | 122 |
| Вес | кг | 0,65 | 1 | 1,4 | 2 |
*Некоторые модели могут быть специально разработаны для питания 12 В 24 В 36 В или 48 В, а номинальная скорость может быть любой от 1000 об/мин до 3000 об/мин
Спецификация]
24 В, 2000 об/мин 4000 об/мин 6000 об/мин, высокоскоростной двигатель постоянного тока, 8 унций на дюйм ~ 64 унции на дюйм (0,055 Нм~ 0,45 Нм), 17 Вт ~ 140 Вт (1/3 л.с.)
| Model | GM57BLY 95-130 | GM57BLY 115-120 | GM57BLY 45-230 | GM57BLY 55-230 | GM57BLY 55-265 | GM57BLY 75-230 | GM57BLY 75-270 | GM57BLY 95-230 | GM57BLY 95-215 | GM57BLY 115-230 | GM57BLY 115-215 | GM57BLY 115-340 | |||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Количество полюсов | 4 полюса | ||||||||||||||||||||||||||||||||||
| Количество фаз | 3 фазы | ||||||||||||||||||||||||||||||||||
| Rated voltage | Volt | 12 | 12 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 36 | ||||||||||||||||||||||
| Rated speed | RPM | 3000 | 2000 | 3000 | 3000 | 6500 | 3000 | 7000 | 3000 | 1500 | 3000 | 1500 | 4000 | ||||||||||||||||||||||
| Rated torque | Oz-in | 48 | 64 | 8 | 16 | 16 | 32 | 32 | 48 | 48 | 64 | 64 | 64 | ||||||||||||||||||||||
| Nm | 0. 33 | 0.45 | 0.055 | 0.11 | 0.11 | 0.22 | 0.22 | 0.33 | 0.33 | 0.45 | 0.45 | 0.45 | |||||||||||||||||||||||
| Рейтинг ток | A | 13 | 13 | 1,16 | 2,4 | 4,3 | 4,8 | 10 | 6,6 | 10 | 6,6 | 10 | 6,6 | 10 | 6,6 | 10 | 6,6 | 8,6 | 4,3 | 7,6 | |||||||||||||||
| Rated power | Watt | 100 | 100 | 17 | 35 | 72 | 70 | 154 | 105 | 50 | 140 | 70 | 180 | ||||||||||||||||||||||
| Пик крутящий момент | унции в | 144 | 144 | 24 | 48 | 48 | 96 | 96 | 149 | 96 | 9638 14 | 144 | 192 | 192 | 192 | ||||||||||||||||||||
| Nm | 1 | 1. 35 | 0.165 | 0.33 | 0.33 | 0.66 | 0.66 | 1 | 1 | 1.35 | 1.35 | 1.35 | |||||||||||||||||||||||
| Пиковой ток | A | 40 | 40 | 3,48 | 7,2 | 12,9 | 14,4 | 30 | 19 1 | 14,4 | 30 | 19 1933 197.8 | 9,9 | 25,8 | 12,9 | 22,8 | |||||||||||||||||||
| Rotor inertia | g.c㎡ | 173 | 230 | 32 | 75 | 75 | 119 | 119 | 173 | 173 | 230 | 230 | 230 | ||||||||||||||||||||||
| Длина L | мм | 95 | 115 | 45 | 55 | 55 5 | 95 | 95 | 115 | 115 | 115 | ||||||||||||||||||||||||
| Weight | Kg | 1 | 1.25 | 0.33 | 0. 44 | 0.44 | 0.75 | 0.75 | 1 | 1 | 1.25 | 1.25 | 1.25 |
*Некоторые модели могут быть специально разработаны для источника питания 12 В 24 В 36 В или 48 В, а номинальная скорость может быть любой от 2000 об/мин до 6000 об/мин
NEMA 24, 60 мм, 24 В, 48 В, бесщеточный двигатель постоянного тока [Технические характеристики]
24 В, 48 В, 1000 об/мин 3000 об/мин, 0,3 Нм ~ 1,3 Нм (46 унций-дюйм-1), 0,3 Нм ~ 1,3 Нм·дюйм
| Model | GM60BLF 78-430 | GM60BLF 99-430 | GM60BLF 99-460 | GM60BLF 120-430 | GM60BLF 120-445 | GM60BLF 140-430 | GM60BLF 78-230 | GM60BLF 99-218 | GM60BLF 99-230 | GM60BLF 120-230 | GM60BLF 120-210 | GM60BLF 141-230 | GM60BLF 120-108 | GM60BLF 99-340 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Количество полюсов | 8 полюсов | ||||||||||||||
| Количество фаз | 3 фазы | ||||||||||||||
| Rated voltage | Volt | 48 | 48 | 48 | 48 | 48 | 48 | 24 | 24 | 24 | 24 | 24 | 24 | 12 | 36 |
| Номинальная скорость | Об/мин | 3000 | 3000 | 6000 | 3000 | 4500 | 80033 3000 | 1800 | 3000 | 3000 | 1000 | 3000 | 800 | 03083 40083 | |
| Rated torque | Oz-in | 46 | 93 | 93 | 136 | 136 | 183 | 46 | 93 | 93 | 143 | 143 | 186 | 143 | 93 |
| Н·м | 0,32 | 0,65 | 0. 65 | 0.95 | 0.95 | 1.28 | 0.32 | 0.65 | 0.65 | 1 | 1 | 1.3 | 1 | 0.65 | |
| Rated current | A | 3.5 | 6.5 | 13 | 9.5 | 14 | 12 | 7 | 7.3 | 12.2 | 15 | 6 | 19 | 8 | 11 |
| Rated power | Watt | 100 | 200 | 400 | 300 | 450 | 400 | 100 | 120 | 204 | 314 | 100 | 408 | 80 | 260 |
| Peak torque | Oz-in | 140 | 280 | 280 | 407 | 407 | 550 | 137 | 280 | 280 | 430 | 430 | 557 | 430 | 280 |
| Nm | 0. 96 | 1.95 | 1.95 | 2.85 | 2.85 | 3.84 | 0.96 | 1.95 | 1.95 | 3 | 3 | 3.9 | 3 | 1.95 | |
| Пиковый ток | А | 10,5 | 19,5 | 39 | 28,5 | 42 | |||||||||
| 20 | 21,9 | 36,5 | 45 | 18 | 57 | 24 | 383 | ||||||||
| Rotor inertia | kg.c㎡ | 0.24 | 0.48 | 0.48 | 0.72 | 0.72 | 0.96 | 0.24 | 0.48 | 0.48 | 0.72 | 0.72 | 0.96 | 0.72 | 0,48 |
| Длина L | мм | 78 | 99 | 99 | 120 | 120 | 141 | 78 | 99 | 99 | 120 | 120 | 141 | 120 | 99 |
| Weight | Kg | 0. 85 | 1.25 | 1.25 | 1.65 | 1.65 | 2.05 | 0.85 | 1.25 | 1.25 | 1.65 | 1.65 | 2 | 1.65 | 1,25 |
*Некоторые модели могут быть специально разработаны для питания 24 В, 36 В или 48 В, а номинальная скорость может быть любой от 1000 до 4000 об/мин.
]
48 Вольт, 310 Вольт, 2000 об / мин 4000 об / мин 6000 об / мин.
86-460
106-430
126-430
126-450
86-695
106-620
126-620
126-630
307 3033 175 90
4| 1,4 | 2,1 | |||||||||||||
| Rotor power | Watt | 126 | 250 | 220 | 376 | 628 | 380 | 140 | 280 | 376 | ||||
| Peak torque | Oz-in | 175 | 175 | 300 | 429 | 429 | 175 | 300 | 645 | 645 | ||||
| Н·м | 1,2 | 1,2 | 2,1 | 3 | 3 | 1,2 | 2,1 | 4,5 | ||||||
| Torque constant | Nm/A | 0.08 | 0.05 | 0.1 | 0.1 | 0.06 | 0. 16 | 0.86 | 0.86 | 0.6 | ||||
| Пиковый ток | А | 15 | 24 | 21 | 36 | 60 | 7,5 | 2,4 | 4,2 | 6,3 | ||||
| Rotor inertia | g.c㎡ | 390 | 390 | 530 | 650 | 650 | 390 | 530 | 650 | 650 | ||||
| Body length | mm | 86 | 86 | 106 | 126 | 126 | 86 | 106 | 126 | 126 | ||||
| Вес | кг | 2 | 2 | 2,5 | 3 | 3 | 2 | 2,5 | 3 | 3 | 3 | 3 | 3 | 3 |
*Некоторые модели могут быть изготовлены по индивидуальному заказу для соответствия источникам питания 24 В 36 В 48 В 60 В 170 В и 325 В, а номинальная скорость может быть любой от 1000 до 6000 об/мин
NEMA 3 Двигатель постоянного тока [Технический паспорт]
24 В, 48 В, 1000 об/мин, 3000 об/мин, 50 унций на дюйм ~ 350 унций на дюйм (0,35 Нм ~ 2,4 Нм), 110 Вт ~ 750 Вт (1 л. с.)
| Model | GM86BLW 80-233 | GM86BLF 75-230 | GM86BLF 90-230 | GM86BLF 105-230 | GM86BLF 115-215 | GM86BLF 75-430 | GM86BLF 90-430 | GM86BLF 105-430 | GM86BLF 115-410 | GM86BLF 115-430 | GM86BLF 145-415 | GM86BLF 145-430 | GM86BLW115-450 | ГМ86БЛФ 145-630 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Количество полюсов | 8 полюсов | ||||||||||||||||||||
| Количество фаз | 3 фазы | ||||||||||||||||||||
| Номинальное напряжение | Вольт | 24 | 24 | 24 | 24 | 24 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | 8 30 | ||||||
| Rated speed | RPM | 3000 | 3000 | 3000 | 3000 | 1500 | 3000 | 3000 | 3000 | 1000 | 3000 | 1500 | 3000 | 5000 | 3000 | ||||||
| Номинальный крутящий момент | Oz-in | 229 | 60 | 136 | 183 | 229 | 60 | 136 | 183 | 229 | 229 | 350 | 350 | 390 | 350 | ||||||
| Nm | 1. 6 | 0.42 | 0.95 | 1.28 | 1.6 | 0.42 | 0.95 | 1.28 | 1.6 | 1.6 | 2.4 | 2.4 | 2,7 | 2,4 | |||||||
| Rated current | A | 28 | 8.5 | 15 | 20 | 13 | 4.3 | 8 | 10 | 4.5 | 13 | 11 | 21 | 35 | 3.5 | ||||||
| Рейтинг Power | Ватт | 500 | 130 | 300 | 400 | 250 | 130 | 300 30038 | 400 | 0038 | 170 | 500 | 370 | 750 | 1400 | 750 | |||||
| Peak torque | Oz-in | 420 | 180 | 408 | 550 | 686 | 180 | 408 | 550 | 686 | 686 | 1000 | 1000 | 1100 | 1000 | ||||||
| Н·м | 3 | 1,26 | 2,85 | 3,84 | 4,8 | 1,26 | 2,85 | 3,84 | 4,8 | 4,8 | 7 | 7 | 8 | 7 | 8 | 7 | 8 | 7 | 8 | 7 | |
| Rotor inertia | kg. c㎡ | 0.8 | 0.4 | 0.8 | 1.2 | 1.6 | 0.4 | 0.8 | 1.2 | 1.6 | 1.6 | 2.4 | 2.4 | 2 | 2,4 | ||||||
| Длина корпуса L | mm | 80 | 75 | 90 | 105 | 115 | 75 | 90 | 105 | 115 | 115 | 145 | 145 | 115 | 145 | ||||||
| Weight | Kg | 2.5 | 1.6 | 2 | 2.6 | 3.2 | 1.6 | 2 | 2.6 | 3.2 | 3.2 | 3.9 | 3.9 | 3,9 | 3,9 |
*Некоторые модели могут быть специально разработаны для источников питания 24 В 36 В 48 В 60 В 170 В и 325 В, а номинальная скорость может быть любой от 1000 об/мин до 3000 об/мин. [Технический паспорт]
48 В, 2000 об/мин, 4000 об/мин, 6000 об/мин, высокоскоростной двигатель постоянного тока, номинальный крутящий момент 0,7 Н·м ~ 2,5 Н·м (100 унций на дюйм ~ 350 унций на дюйм), 300 Вт (0,4 л. с.) ~ 785 Вт (1 л.с.)
| Модель | GM86BLF 80-430 | GM86BLF 105B-430 | GM86BLF 115B-430 | 902-643 902-643 | ||
|---|---|---|---|---|---|---|
| Количество полюсов | 4 полюса | |||||
| Количество фаз | 3 фазы | |||||
| Номинальное напряжение | Вольт | 48 | 48 | 48 | 48 | |
| Номинальная скорость | Об/мин | 3000 | 3000 | 3000 | 3000 | |
| Номинальный крутящий момент | Унц-дюйм | 143 | 258 | 300 | 356 | |
| Н·м | 1 | 1,8 | 2,1 | 2,5 | ||
| Номинальный ток | А | 8,3 | 14 | 17 | 18,3 | |
| Мощность ротора | Вт | 314 | 550 | 640 | 785 | |
| Пиковый крутящий момент | Унц-дюйм | 426 | 800 | 900 | 1068 | |
| Н·м | 3 | 5,6 | 6,3 | 7,5 | ||
| Пиковый ток | А | 25 | 42 | 51 | 55 | |
| Задняя ЭДС | В/КРПМ | 13,7 | 13,7 | 13,3 | 13,3 | |
| Инерция ротора | кгс㎡ | 1,2 | 2,3 | 2,6 | 3,2 | |
| Длина корпуса | мм | 80 | 105 | 115 | 130 | |
| Вес | кг | 2,3 | 3,4 | 3,8 | 4,3 |
*Некоторые модели могут быть рассчитаны на питание 24 В 36 В 48 В 60 В 170 В и 325 В, а номинальная скорость может быть любой от 2000 об/мин до 4000 об/мин
NEMA 34, 90 мм от 24 В до 325 В. Бесщеточные двигатели постоянного тока [Лист данных]
24 Вольт 48 Вольт 325 Вольт, 2000rpm 4000rpm 6000rpm, 1 нм ~ 2,5 NM (143 Ozin ~ 358 ozin), 315 watt ~ 785 ~ 785 ~ 735 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 735 ~ 735 ~ 735 ~ 735 ~ 735 ~ 2,5 NM (143 Ozin ~ 358).
| Модель | GM90BLF 85-230 | GM90BLF 110-430 | GM90BLF | |
|---|---|---|---|---|
| Количество полюсов | 4 полюса | |||
| Номер фазы | 3 фазы | |||
| Номинальное напряжение | Вольт | 24 | 48 | 48 |
| Номинальная скорость | Об/мин | 3000 | 3000 | 3000 |
| Номинальный крутящий момент | Унц-дюйм | 143 | 260 | 358 |
| Н·м | 1 | 1,8 | 2,5 | |
| Номинальный ток | А | 18 | 14 | 18,3 |
| Мощность ротора | Вт | 315 | 565 | 785 |
| Пиковый крутящий момент | Унц-дюйм | 430 | 773 | 1073 |
| Н·м | 3 | 5,4 | 7,5 | |
| Пиковый ток | А | 54 | 42 | 55 |
| Задний ЭДС | В/КРПМ | 13 | 13,7 | 13,3 |
| Инерция ротора | кгс㎡ | 1,6 | 2,5 | 3,4 |
| Длина корпуса | мм | 85 | 110 | 135 |
| Вес | кг | 3,5 | 4,5 | 5 |
*Некоторые модели могут быть специально разработаны для питания 24 В 36 В 48 В 60 В 170 В и 325 В, а номинальная скорость может быть любой от 2000 об/мин до 6000 об/мин
NEMA 42, 110 мм 48 В 170 В 325 В бесщеточные двигатели постоянного тока.
), 1000W ~ 3000W, 1.5 hp ~ 4 hp
| Model | GM110BLF 110-430 | GM110BLF 140-430 | GM110BLF 170-430 | GM110BLF 170-415 | GM110BLF 110-630 | GM110BLF 170-630 | GM110BLF 230-630 | GM110BLF 230-730 | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Количество полюсов | 8 полюсов | |||||||||||||||||||||||
| Количество фаз | 3 фазы | |||||||||||||||||||||||
| Номинальное напряжение | Вольт | 48 | 48 | 48 | 48 | 310 | 310 310 3100033 310 | 520 | ||||||||||||||||
| Continuous rated speed | RPM | 3000 | 3000 | 3000 | 1500 | 3000 | 3000 | 3000 | 3000 | |||||||||||||||
| Continuous rated torque | Oz-in | 455 | 688 | 915 | 915 | 455 | 915 | 1373 | 1373 | |||||||||||||||
| Н·м | 3,2 | 4,8 | 6,4 | 6,4 | 3,2 | 6,4 | 9,6 | 9,6 | ||||||||||||||||
| Рейтинг ток | A | 28 | 40 | 53 | 27 | 4,1 | 8,2 | 13 | 7,3 | |||||||||||||||
| Рейтинг Power | Ватт | 1000 | 1500 | 2000 | 1000 | 1000 | 2000 | 3000 | 339 | 2000 | 3000 | 33339 | 2000 | 3000 | 3 3000 | 2000 | 3000 | 3000 | 2000 | 3000 | 2000 | 3000 | 0038 | |
| Peak torque | Oz-in | 1430 | 2050 | 2860 | 2860 | 1430 | 2860 | 4290 | 4290 | |||||||||||||||
| нм | 10 | 15 | 20 | 20 | 10 | 20 | 30 | 30 | ||||||||||||||||
| Пиковый ток | А | 80 | 120 | 150 | 80 | 13 | 25 | 39 | 22 | |||||||||||||||
| Rotor inertia | Kg. c㎡ | 3 | 4.5 | 6 | 6 | 3 | 6 | 9 | 9 | |||||||||||||||
| Length L+25mm | mm | 110+25 | 140+25 | 170+25 | 170+25 | 110+25 | 170+25 | 230+25 | 230+25 | |||||||||||||||
| Вес | кг | 4,5 | 5,8 | 7 | 7 | 4,5 | 7 | 9,5 | 9,5 |
* Некоторые модели могут быть изготовлены по индивидуальному заказу для соответствия источникам питания 48 В 60 В 170 В и 325 В, а номинальная скорость может быть любой от 1000 об/мин до 3000 об/мин. Приводные системы Схема
по
Чарльз Фрик
Скачать PDF
Системы боеприпасов быстро становятся такими же ограниченными по стоимости, как и другие области техники, поскольку затраты растут, а клиенты требуют продуктов меньшего размера и большей дальности. Чтобы эффективно управлять этими боеприпасами в полете, небольшая система управления (CAS) выполняет небольшие точные регулировки для размещения стабилизаторов и регулировки воздушного потока над корпусом. Традиционно эти системы были пневматическими или приводились в действие щеточным двигателем постоянного тока с редуктором, но современные достижения в области электроприводов, включая бесщеточные двигатели постоянного тока (BLDC), позволили создать меньшие, легкие, дешевые и более эффективные конструкции CAS. Однако это происходит за счет дополнительной сложности системы для управления тремя фазами BLDC.
Дополнительная сложность возникает из ряда источников. Во-первых, в то время как для традиционного коллекторного двигателя постоянного тока требуется только один H-мост, для BLDC требуются три отдельные пары полевых МОП-транзисторов для управления фазами. Это добавляет небольшую стоимость и требует дополнительной площади земли на печатной плате. При управлении этими полевыми МОП-транзисторами необходимо соблюдать осторожность, чтобы избежать протекания тока, который может вывести из строя полевые МОП-транзисторы, если одновременно активируются верхние и нижние транзисторы. Особое внимание следует уделить мертвому времени, вставляемому между верхней и нижней линиями возбуждения для широтно-импульсной модуляции (ШИМ).
С точки зрения программного обеспечения, обычным коллекторным двигателем можно управлять с помощью простого ПИД-контура, в то время как для BLDC потребуются более сложные контуры и стратегии коммутации, обычно измеряющие токи обмотки, фазные напряжения, угол ротора и скорость.
Строительство BLDC
BLDC представляет собой набор электромагнитов на статоре с постоянными магнитами, прикрепленными к подвижному ротору. Двигатель может быть либо инраннерным (магниты внутри катушек), либо аутраннерным (магниты снаружи катушек). На рисунке 1 показаны инраннер и аутраннер BLDC. В обоих случаях три фазы проводов (U, V, W или A, B, C) наматываются на зубья статора. Эти обмотки последовательно запитываются, чтобы притягивать и отталкивать постоянные магниты (красный/синий).
Рисунок 1. Inrunner против Outrunner.
Стандартный микропроцессор или DSP не имеют силы тока привода для адекватного питания катушек напрямую, поэтому каскад инвертора мощности, состоящий из полевых МОП-транзисторов (по два на фазу), обычно используется для преобразования привода ШИМ из интерфейса управления в требуемое высокое напряжение. привод для мотора.
Обычно в трехфазном инверторе используется шесть N-канальных МОП-транзисторов (см. верхнюю часть рис. 2), которые создают состояния переключения, показанные в нижней части рис. 2. Несколько состояний переключения не показаны: 001, 010. , 011 и 101. 1 означает, что один из трех верхних МОП-транзисторов включен. Эти состояния отображаются в пространстве состояний, как показано шестью секторами на рис. 3. При включении и выключении переключателей напряжение, подаваемое на обмотки, может достигать максимума 2/3 × В DC . Естественным расширением этой стратегии является применение ШИМ к каждой паре МОП-транзисторов. Изменяя скважность сигналов ШИМ, генерируемое напряжение в обмотках может создавать широкий диапазон напряжений в зависимости от разрешения системы генерации ШИМ.
Рис. 2. Трехфазный инвертор и состояния переключения.
Рисунок 3. Переключение представлений в пространстве состояний и разделение на Сектор I по Сектор VI.
Без ШИМ вполне естественной стратегией коммутации является простое последовательное питание каждой пары обмоток (то есть блочная коммутация или шестиступенчатая коммутация). Для этой стратегии одна или две фазы подключаются к высокому уровню, а остальные обмотки — к низкому. При последовательном включении фаз магниты на роторе притягиваются к каждой фазе, и ротор начинает вращаться. Чтобы определить, на какие фазы подавать питание, три датчика Холла обычно устанавливаются на статоре с разницей в 60 электрических градусов друг от друга. Датчики Холла обнаруживают каждый из магнитов ротора и генерируют 3-битную цифровую последовательность, которая используется для определения следующей области коммутации. Хотя эта стратегия хорошо работает для недорогих систем управления двигателем, она страдает от пульсаций крутящего момента на низких скоростях. Кроме того, эта пульсация крутящего момента вызывает акустический шум и вносит ошибку позиционирования, если двигатель используется для позиционирования/сервоприводов. 1
Синусоидальная коммутация работает по принципу выравнивания токов статора с потоком статора в BLDC. BLDC движется за счет трапециевидного тока через обмотки. Каждый из этих токов должен быть сдвинут по фазе на 120°. Синхронный двигатель с постоянными магнитами (PMSM) похож на BLDC, но требует синусоидальных токов для привода. Блок-схема привода СДПМ представлена на рисунке 4. Простое управление скоростью достигается за счет использования датчика скорости или оценки на основе датчика положения вала и параметров двигателя. Синусоидальный привод особенно хорошо работает на низких скоростях, но выходит из строя на более высоких скоростях, поскольку электрическая частота необходимой синусоидальной волны также должна увеличиваться со скоростью. На более высоких скоростях двигателю требуются более высокие крутящие моменты, что приводит к отставанию фазных токов. 2 Для надлежащего управления на более высоких скоростях обычно необходимо вводить фазовое опережение, чтобы поддерживать правильное выравнивание векторов крутящего момента и магнитного потока.
Рис. 4. Синусоидальный привод СДПМ.
Для преодоления этой проблемы может быть реализована более совершенная схема управления, называемая полевым управлением (FOC). Как и в случае с другими стратегиями коммутации, FOC может быть реализован без датчика с оценкой положения и скорости на основе противо-ЭДС, генерируемой обмотками, или с датчиками положения и тока. В основе ВОК лежит управление векторами крутящего момента и потока, поступающими в обмотки двигателя. Генерация этих векторов исходит из желаемой скорости, подаваемой на двигатель.
Используя электрические и механические константы двигателя (момент инерции, коэффициент трения, индуктивность и сопротивление обмоток статора и постоянная противо-ЭДС), контуры ПИ на рис. 5 преобразуют желаемую скорость в величины постоянного тока. Для управления электрическим циклом двигателя эти величины необходимо преобразовать в систему отсчета ротора (рис. 6) для получения V α и V β с помощью преобразования Парка. Следующим шагом в FOC является преобразование V α и V β в значения ШИМ, отправляемые на блок инвертора ШИМ. Обычно для этого процесса используется либо схема синусоидальной модуляции (SPWM), либо схема модуляции пространственного вектора (SVPWM или SVM).
Рис. 5. Блок-схема ВОК.
Рис. 6. Преобразование параметров управления в ВОК.
Как упоминалось ранее, управляя переключением МОП-транзисторов внутри силового инвертора, можно создать представление пространственного вектора, как на рис. 3. Пространство между соседними единичными векторами кодируется для создания сектора между 1 и 6, соответствующего шесть коммутационных секторов электрического цикла коммутации. Крупный план сектора 1 с рисунка 3 показан на рисунке 7. Вектор напряжения V REF состоит из векторов напряжения V α и V β , а угол θ представляет собой арктангенс V d , деленный на V q . 3 На рисунке 7 показано, что V REF может быть получен с использованием двух смежных единичных векторов (V 1 и V 2 ) и пребывания в каждом состоянии определенного количества времени (соответствующего рабочему циклу). Этот рабочий цикл можно рассчитать с помощью уравнений, аналогичных тем, которые получены из векторной математики (см. рис. 8).
Рис. 7. Сектор 1 пространства состояний.
Расчет U, V, W по векторному уравнению
Рисунок 8. Время секторов из опорных векторов.
Из уравнений на рис. 7 время ШИМ можно найти, используя нормализованное время 1,0 (равное полному 100% рабочему циклу) и вычитая T n и T n+1 . Сектор можно определить с помощью дополнительных расчетов, как показано на рисунке 9.
Рисунок 9. Определение сектора.
После того, как рабочие циклы рассчитаны и отправлены в модуль PWM контроллера, достигается управление без обратной связи с использованием FOC. Теперь необходимо интегрировать обратную связь, чтобы обеспечить управление с обратной связью. Как показано на рис. 4, токи трех обмоток измеряются и преобразуются с использованием обратных преобразований Кларка и обратного преобразования Парка. Чтобы измерить эти токи, можно использовать несколько различных стратегий: шунтирование в соответствии с каждой фазной обмоткой, один шунт нижнего конца между тремя нижними МОП-транзисторами и землей, фазовые шунты под каждым МОП-транзистором на землю или шунты на стороне высокого напряжения между каждым из них. верхний МОП-транзистор и V DC . Если конструкция ограничена по стоимости, метод с использованием двух шунтов на одной линии с обмотками обеспечивает хорошее измерение, поскольку это обеспечивает прямой способ измерения тока двух обмоток напрямую. Третий ток можно рассчитать, используя закон тока Кирхгофа и сумму 0. Дополнительным преимуществом является то, что ток можно измерить в любой момент, а не только при включенных нижних или верхних МОП-транзисторах. После измерения этих токов их следует нормализовать в диапазоне [–1, +1], используя максимальный ток, измеряемый шунтирующей системой.
Для определения положения и скорости можно использовать энкодеры (относительные или абсолютные), датчики Холла, резольверы или магнитные угловые датчики. Однако в зависимости от разрешения датчика могут потребоваться дополнительные схемы оценки положения и скорости. Независимо от технологии, измеренный угол необходимо преобразовать в электрический угол, чтобы синхронизировать коммутацию с фактическим положением ротора и включить преобразования ротора. Угловая скорость также должна быть известна, но обычно она хранится в механической области, чтобы соответствовать желаемой входной скорости.
Зная фактическое положение и скорость ротора, можно выполнить обратное/обратное преобразование Парка и Кларка для преобразования фазных токов из системы отсчета неподвижного статора во вращающуюся систему отсчета в системе отсчета d, q. Контуры PI для результирующих членов ошибок тока и скорости создают векторы ошибок, которые затем возвращаются обратно в прямые преобразования Парка и Кларка, и процесс управления может повторяться.
Как быстро должен повториться этот процесс? Ответ зависит от характеристик двигателя. Частота ШИМ обычно выбирается вне слышимого диапазона (от 15 кГц до 30 кГц), чтобы двигатель не резонировал на слух. Затем FOC и необходимые контуры управления реализуются в подпрограмме обслуживания прерывания PWM, так что новые значения для PWM доступны для следующего цикла PWM. Это налагает жесткие временные ограничения на процедуру FOC, поскольку любое время, затраченное на обслуживание прерывания PWM, является временем, не затраченным на обслуживание других аспектов управляющего процессора (таких как последовательные интерфейсы для программ на базе ПК). При частоте ШИМ 30 кГц каждая ISR ШИМ составляет всего 33,3 мкс. Так что каждая микросекунда имеет значение! Необходимо соблюдать осторожность, чтобы свести к минимуму вычислительные затраты для синуса и косинуса и других вычислений с плавающей запятой. Как правило, предпочтительно, чтобы подпрограмма FOC занимала менее 50% доступного времени PWM ISR, чтобы процессор мог обслуживать другие периферийные устройства, такие как UART, для обслуживания менее важных задач, таких как изменение желаемой скорости или установка нового положения.
Отдельные компоненты
Учитывая и без того сложный характер реализации FOC, тщательный выбор компонентов может помочь свести к минимуму дополнительные проблемы системной интеграции. Analog Devices предлагает ряд компонентов для сигнальных цепей управления двигателем. Эти детали включают драйверы затворов, датчики абсолютного угла и эффекта Холла, датчики тока и изоляционные изделия.
Простую блок-схему компонентов сигнальной цепи управления двигателем можно увидеть на рисунке 10. На верхнем уровне положение и скорость вала BLDC определяются с помощью датчика угла ADA4571 AMR и преобразователя магнитного поля AD22151. Токи фазных обмоток измеряются с помощью встроенных шунтирующих резисторов, а усилители измерения тока AD8418 снимают синфазное напряжение ШИМ. 8-битный 18-разрядный АЦП LTC2345-18 преобразует 6-кратное аналоговое напряжение от датчиков в цифровую область для микроконтроллера. Микроконтроллер использует эти сигналы для расчета рабочего цикла ШИМ, который отправляется на аппаратные таймеры. Драйверы МОП-транзисторов LT1158 действуют как драйверы затворов для шести МОП-транзисторов силового инвертора.
Рис. 10. Блок-схема цепочки сигналов управления двигателем.
LT1158 — это интегрированный полумостовой N-канальный драйвер MOSFET. В то время как напряжение питания может варьироваться от 5 В до 30 В постоянного тока, логика формы входного сигнала ШИМ может принимать уровни ТТЛ или КМОП. Кроме того, один вход ШИМ преобразуется в высокий и низкий управляющие сигналы MOSFET, в то время как микросхема автоматически вставляет адаптивное мертвое время. Это означает, что частота ШИМ может изменяться динамически, а мертвое время автоматически вставляется для защиты полевых МОП-транзисторов от пробоя тока без необходимости внесения изменений в код или регистры таймера ШИМ.
Рис. 11. Драйвер двойного N-канального МОП-транзистора LT1158.
Встроенный анизотропный магниторезистивный (AMR) датчик ADA4571 способен измерять поворот на 180° с точностью до 0,5°. Этот датчик работает от одного источника питания от 2,7 В до 5 В и потребляет всего 7 мА с включенной температурной компенсацией. Выход этого датчика представляет собой две аналоговые синусоидальные волны (V SIN , V COS ) с центром около 2,5 В (питание 5 В). Как только напряжения V SIN и V COS оцифрованы, их можно перевести в угол по простой формуле:
Рис. 12. Датчик ADA4571 AMR.
Для измерения абсолютного вращения на 360° ADA4571 можно комбинировать с датчиком магнитного поля с линейным выходом (эффект Холла), таким как AD22151. AD22151 предназначен для работы от одного источника питания 5 В и выдает напряжение, линейно пропорциональное магнитному полю, приложенному перпендикулярно корпусу. Во время нормальной работы устройство потребляет максимум 10 мА и может обнаруживать биполярные или униполярные поля с различной степенью усиления. Преимуществом этого датчика является аналоговое выходное напряжение, которое можно легко добавить в систему, уже измеряющую аналоговые величины, такие как выходы датчика тока или дополнительные аналоговые датчики угла. Поместив AD22151 перпендикулярно ADA4571, можно программно соединить выходные сигналы вместе, чтобы обеспечить определение 360-градусного движения диаметрального магнита, установленного на валу.
Наряду с датчиками угла, ВОК с датчиками требуют точного измерения фазных токов через BLDC. AD8418 — это двунаправленный усилитель для измерения тока с нулевым дрейфом, хорошо подходящий для этой задачи. Этот внешний шунтирующий усилитель работает с коэффициентом усиления 20 В/В по температуре с диапазоном подавления синфазного сигнала от –2 В до +70 В. Усилитель также воспринимает двунаправленные токи через шунт, что особенно полезно при измерении фазных токов для BLDC. Деталь рассчитана на работу с напряжением питания В S между 2,7 В и 5 В, с аналоговым выходным напряжением, близким к V S /2. Если питание выбрано для 5 В, выходное напряжение составляет около 2,5 В, как и в ADA4571.
Рисунок 13. Датчик тока AD8418.
Для датчиков с аналоговым выходом результаты должны быть преобразованы в цифровую форму. Несмотря на то, что существует множество АЦП, LTC2345 особенно подходит для управления двигателем благодаря 8 одновременным каналам дискретизации. Выборка синхронизируется с одним нарастающим фронтом на линии преобразования. Фазные токи и выходы датчика абсолютного угла затем могут быть синхронизированы с одним и тем же моментом времени во время ШИМ с выравниванием по центру. Работа с одним источником питания 5 В упрощает конструкцию источника питания, при этом потребляя менее 20 мА. Отдельное выходное напряжение цифровой логики позволяет LTC2345 взаимодействовать с микроконтроллерами, процессорами или FPGA с более низким напряжением. Благодаря гибкому характеру диапазонов аналоговых входов смещение 2,5 В датчиков положения и тока может быть автоматически удалено аппаратно с помощью аналоговых входных каналов (IN–). Данные могут выводиться из LTC2345 с использованием выходов SDO с различной тактовой частотой в зависимости от требуемой пропускной способности дискретизации.
Рисунок 14. Блок-схема LTC2345.
Выводы
С ростом распространенности BLDC в исполнительных системах управления требуются более совершенные алгоритмы, датчики и приводные схемы. Синусоидальная и FOC — две стратегии коммутации, которые обеспечивают точное управление BLDC. Обе стратегии требуют точного измерения угла ротора BLDC, что может быть затруднено без правильных компонентов. Однако ADA4571 и AD22151 упрощают это измерение. LT1158 упрощает линии возбуждения ШИМ для трех фаз для БКЭПТ за счет уменьшения количества линий ШИМ и исключения расчетов мертвого времени. AD8418 упрощает ток обмотки, а LTC2345 легко оцифровывает и синхронизирует выходы нескольких аналоговых датчиков. Эти компоненты составляют небольшую часть портфолио Analog Devices для приложений управления двигателями. Для получения дополнительной информации и помощи по проектированию посетите веб-сайт Analog Devices.
использованная литература
1 Шиён Ли. «Сравнительное исследование методов коммутации трехфазного бесщеточного двигателя постоянного тока с постоянными магнитами». 2009.
2 Даниэль Коллинз. «Часто задаваемые вопросы: что такое синусоидальная коммутация для двигателей постоянного тока?» Советы по управлению движением.
3 Джин-Ву Юнг. «Проект № 2 Космический векторный инвертор ШИМ». Университет штата Огайо, февраль 2005 г.
Автор
Чарльз Фрик
Чарльз (Час) Фрик — инженер по системным приложениям в Aerospace and Defense Group в Гринсборо, Северная Каролина. До прихода в ADI Час получил две степени бакалавра наук в области робототехники и электротехники в Вустерском политехническом институте в 2016 году. С момента прихода в ADI в 2016 году он работал над всевозможными проектами внутренних и внешних заказчиков, затрагивающими области проектирования печатных плат, встроенного кода C. , графические интерфейсы MATLAB, автоматизация тестирования Python, управление двигателем и многое другое. Вне работы Часа, скорее всего, можно найти либо работающим на своем Jeep Wrangler JLR в гараже, либо катающимся по бездорожью (вероятно, покрытым грязью) в Национальном лесу Ухарри со своей женой и пушистым питбулем «Атлас».
Понимание эффекта ШИМ при управлении бесщеточным двигателем постоянного тока
Цели обучения
- Понимание коммутации бесщеточного двигателя постоянного тока.
- Обзор регулирования ШИМ для бесщеточных двигателей постоянного тока.
- Узнайте пределы ШИМ для бесколлекторных двигателей постоянного тока.
Разработчики систем управления движением часто сталкиваются с трудностями при выборе или разработке электроники, использующей широтно-импульсную модуляцию (ШИМ) для управления бесщеточными двигателями постоянного тока. Полезно помнить о некоторых основных физических явлениях, чтобы избежать непредвиденных проблем с производительностью. В этом документе приведены общие рекомендации по использованию ШИМ-драйвера с бесщеточным двигателем постоянного тока.
Рис. 1: Пример Н-моста трехфазного двигателя, состоящего из шести транзисторов и подключенного к трем фазам двигателя. Предоставлено: Portescap
Коммутация бесщеточного двигателя постоянного тока
В отличие от щеточных двигателей постоянного тока, в которых коммутация осуществляется механически щетками, бесщеточные двигатели постоянного тока коммутируются электронным способом. Это означает, что фазы двигателей включаются и выключаются последовательно в соответствии с относительным положением ротора по отношению к статору. Для трехфазного бесщеточного двигателя постоянного тока драйвер состоит из шести электронных переключателей (обычно транзисторов), обычно называемых трехфазным Н-мостом (см. рис. 1). Эта конфигурация позволяет использовать три двунаправленных выхода для питания трех фаз двигателя.
Рис. 2: Схематическое сечение запуска бесщелевого двигателя постоянного тока Шаг 3. Синяя область — это ротор с двухполюсным постоянным магнитом. Магнитное поле, создаваемое магнитом, показано синей стрелкой. Оранжевая область — трехфазная обмотка. Когда ток течет из фазы A в фазу C, он индуцирует магнитное поле, которое для упрощения представлено оранжевой стрелкой. Ротор будет вращаться, когда обе стрелки выровняются. Привод будет коммутировать фазы (вращая магнитное поле статора, оранжевая стрелка), чтобы поддерживать угол как можно ближе к 90 градусов между магнитными полями статора и ротора (максимальный создаваемый крутящий момент). Предоставлено: Portescap
Открытие и закрытие транзисторов в определенной последовательности возбуждает фазы двигателя для поддержания оптимальной ориентации магнитного поля, индуцируемого статором по отношению к магниту ротора (см. рис. 2, рис. 3 и рис. 4).
Рис. 3. Фазный ток и состояние датчика Холла с шестиступенчатой коммутацией. Предоставлено: Portescap
Двигатель может приводиться в действие широко используемой шестиступенчатой трапециевидной коммутацией (см. рис. 3) или может использоваться для достижения более совершенного векторного управления, также называемого поле-ориентированным управлением (FOC). , в зависимости от сложности электроники (см. рис. 4).
Рис. 4: Фазный ток при использовании усилителя на ВОК. Предоставлено: Portescap
Регулирование ШИМ для бесщеточных двигателей постоянного тока
В щеточном (см. рис. 5) или бесщеточном двигателе постоянного тока (см. рис. 6) рабочая точка (скорость и крутящий момент) приложения может варьироваться. Роль усилителя состоит в том, чтобы изменять напряжение питания или ток, или и то и другое, для достижения желаемого выходного сигнала движения.
Часто существует два разных способа изменения напряжения или тока:
- Линейные драйверы (или линейные усилители)
- Драйверы прерывателя (или линейные усилители).
Линейные усилители регулируют мощность, подаваемую на двигатель, путем изменения напряжения или тока. Мощность, которая не передается двигателю, рассеивается (потеря мощности, см. рис. 6). В результате для рассеивания мощности требуется большой радиатор, что увеличивает размер усилителя и затрудняет его интеграцию в приложение.
Усилитель-прерыватель модулирует напряжение (и ток) путем включения и выключения силовых транзисторов. Основным преимуществом является экономия энергии, когда транзистор выключен. Это помогает продлить срок службы батареи приложения, меньше нагревает электронику и позволяет уменьшить размер электроники. Большую часть времени в усилителях с прерывателем используется метод ШИМ.
Рисунок 5: Сравнение архитектуры управления движением между щеточным двигателем постоянного тока и бесщеточным двигателем постоянного тока. Предоставлено: Portescap
Метод ШИМ заключается в изменении рабочего цикла на фиксированной частоте (см. рис. 7) для регулировки напряжения или тока в пределах желаемого целевого значения. Обратите внимание, что одним из преимуществ метода ШИМ для прерывания тока по сравнению с другими методами является то, что частота переключения является фиксированным параметром. Это облегчает разработчикам электроники фильтрацию генерируемых акустических и электромагнитных помех.
Рис. 6: Пример линейного усилителя, питающего двигатель. Мощность, постоянно рассеиваемая драйвером для этой катушки двигателя, составляет: P_dissipated (усилитель) = (24 – 19) * 1 = 5 Вт Предоставлено: Portescap
двигатель — это полное напряжение шины. Когда транзистор открыт 50 % времени, среднее напряжение, подаваемое на двигатель, составляет половину напряжения на шине. Когда транзистор закрыт 100% времени, на двигатель не подается напряжение.
Рисунок 7: Различные рабочие циклы ШИМ. Обратите внимание, что частота одинакова для всех случаев, тогда как среднее напряжение (пунктирная линия) пропорционально коэффициенту заполнения. Предоставлено: Portescap
Эффект индуктивности в бесщеточных двигателях постоянного тока
Двигатель постоянного тока характеризуется индуктивностью L, сопротивлением R и противоэлектродвижущей силой (противо-ЭДС) E, включенными последовательно. Обратная ЭДС представляет собой напряжение, вызванное магнитной индукцией (закон индукции Фарадея-Ленца), которое противодействует приложенному напряжению и пропорционально скорости двигателя. См. рис. 8, на котором показан двигатель при включенной и выключенной ШИМ.
Рисунок 8: Упрощенные эквивалентные схемы, представляющие двигатель постоянного тока, когда ШИМ включен (слева) и выключен (справа). Для простоты правая схема соответствует режиму медленного затухания (ток рециркулирует в двигателе). Предоставлено: Portescap
А пока, для простоты, давайте не будем рассматривать обратную ЭДС.
При подаче напряжения или отключении напряжения в цепи RL дроссель будет препятствовать изменению тока. При приложении напряжения U к цепи RL ток будет следовать экспоненциальному росту первого порядка, динамика которого зависит от электрической постоянной времени τ, равной отношению L/R (см. рис. 9).). Оно асимптотически достигнет стационарного значения, то есть 99,7% U/R, после 5-кратного увеличения постоянной времени.
Рис. 9: Экспоненциальный рост тока в цепи RL. Предоставлено: Portescap
Такое же экспоненциальное поведение будет наблюдаться при разрядке цепи RL. См. рис. 10.
На практике бесщеточные усилители постоянного тока имеют довольно высокую частоту ШИМ и не позволяют току достичь установившегося состояния. Эта частота обычно выше 50 кГц, поэтому ток можно правильно модулировать с достаточным количеством циклов, возникающих на каждом этапе коммутации. Для частоты ШИМ 50 кГц время цикла закрытия и открытия транзистора равно 20 мкс. Учитывая шестиступенчатую коммутацию, время одной коммутации для двигателя с одной полюсной парой, работающего со скоростью 40 000 об/мин (667 Гц), займет 250 мкс. Это позволит, по крайней мере, 250/20 = 12,5 циклов ШИМ в течение одного шага коммутации.
Рисунок 10: Экспоненциальное падение тока в цепи RL. Предоставлено: Portescap
Бесщеточные двигатели постоянного тока имеют электрическую постоянную времени τ, равную нескольким сотням микросекунд. Таким образом, у тока будет время среагировать во время каждого цикла ШИМ (см. рис. 11). Однако механическая постоянная времени находится в диапазоне нескольких миллисекунд, поэтому разница между механической и электрической постоянной времени составляет 10. Поэтому ротор самого двигателя не успеет среагировать при переключении напряжения на типичных частотах ШИМ. Низкие частоты ШИМ в несколько тысяч герц могут вызывать вибрации ротора и слышимый шум. Желательно выходить за пределы слышимого спектра, то есть как минимум выше 20 кГц.
Пределы ШИМ для бесколлекторных двигателей постоянного тока
ШИМ приводит к нарастанию и падению тока в каждом цикле. Разница между минимальным и максимальным значением тока называется пульсацией тока ∆ I (см. рис. 11). Пульсации сильного тока могут быть проблематичными. Желательно, чтобы он был как можно ниже.
Рис. 11: Типичные пульсации тока, генерируемые ШИМ с частотой 50 кГц в установившемся режиме (рабочий цикл 80 %). Рабочий цикл одинаков в обоих случаях, поэтому средний ток одинаков. На графике слева показаны низкие пульсации тока. Среднеквадратичное значение тока близко к среднему значению тока. На графике справа показаны высокие пульсации тока. Среднеквадратичное значение тока значительно выше, чем среднее значение тока. Предоставлено: Portescap
Крутящий момент двигателя постоянного тока пропорционален среднему току, как показано в формуле:
Обратите внимание, что для крутящего момента двигателя необходимо учитывать средний ток I avg . Средний ток зависит только от рабочего цикла и не зависит от пульсаций тока. Как видно на рис. 11, средний ток в обоих случаях одинаков (одинаковый рабочий цикл), тогда как пульсации сильно различаются (разная электрическая постоянная времени).
В отличие от щеточных двигателей постоянного тока, бесщеточные двигатели постоянного тока не имеют щеток. Сильные пульсации тока не являются проблемой для самого срока службы. Пульсации тока будут иметь большое влияние на потери двигателя, вызывая ненужный нагрев. Пульсации тока будут генерировать два типа потерь:
Потери в Джоулях
Пульсации тока будут увеличивать среднеквадратичное значение тока, которое является значением, учитываемым при расчете потерь в Джоулях. Пульсации будут генерировать дополнительный нагрев без увеличения среднего тока и, следовательно, без увеличения крутящего момента. Обратите внимание, что это прямоугольная зависимость от среднеквадратичного значения тока.
Если T – период времени ШИМ, среднеквадратичное значение тока можно рассчитать по формуле: изменение магнитного поля в проводящем материале будет индуцировать напряжение, которое затем будет генерировать циркулирующие токи, называемые вихревыми токами.
Потери на вихревые токи пропорциональны квадрату скорости двигателя и квадрату тока двигателя. Основываясь на практических измерениях, когда пульсации тока высоки, дополнительные потери в стали могут стать значительными. Важно, чтобы пульсации тока были как можно меньше.
Давайте определим формулу текущей пульсации, чтобы мы могли определить рекомендации по ее минимизации.
Из схемы двигателя (см. рис. 8) мы можем вывести уравнение двигателя:
Предположим, что изменение тока является линейным в течение коротких периодов времени T_ON и T_OFF. Следовательно, мы можем переписать дифференциальное уравнение следующим образом:
В предположении установившегося состояния пульсации тока постоянны:
Таким образом, два уравнения можно объединить в одно:
Мы можем упростить уравнение, введя коэффициент заполнения D и частоту ШИМ f ШИМ:
Отсюда мы можем вывести формулу пульсаций тока ∆I:
2
03 Вариация пульсаций тока в зависимости от рабочего цикла ШИМ представляет собой параболу, как показано на рисунке 12.
Рисунок 12: Пульсации тока в зависимости от рабочего цикла ШИМ. Предоставлено: Portescap
Максимальное значение пульсаций достигается при коэффициенте заполнения 50%, т.е. D=0,5:
Из уравнения. 15, there are several parameters influencing:
- The power supply U PWM
- The duty cycle D
- The PWM frequency f PWM
- The inductance L.
Recommendations to минимизация пульсаций тока в бесщеточных двигателях постоянного тока
Мы можем дать некоторые рекомендации по минимизации пульсаций:
Уменьшить или адаптировать напряжение питания
Пульсации тока пропорциональны напряжению питания. Наличие высокого напряжения питания может быть полезно для достижения экстремальных рабочих точек, требующих высокой скорости или большей мощности. Однако, если приложение не требует высокой скорости или мощности, более низкое напряжение питания будет полезно для уменьшения пульсаций тока. Работа в той же точке нагрузки с более низким напряжением питания также увеличит рабочий цикл, что еще больше уменьшит пульсации тока. Важно удерживать рабочий цикл ШИМ как можно дальше от 50%, что является наихудшим случаем (рис. 12).
Увеличение частоты ШИМ
Чем выше частота, тем короче время цикла ШИМ; следовательно, у тока будет меньше времени для роста. Для бесколлекторных двигателей постоянного тока рекомендуются частоты ШИМ не менее 50 кГц. Частоты ШИМ 80 кГц и более были бы даже более подходящими для двигателей с очень малой электрической постоянной времени.
Увеличение индуктивности
Бесщеточные двигатели постоянного тока имеют очень маленькое значение индуктивности. Рекомендуется добавить внешние индуктивности, так как они будут замедлять нарастание и падение тока, тем самым уменьшая пульсации тока. Кроме того, указанное значение индуктивности дано для частоты ШИМ 1 кГц. Поскольку индуктивность двигателя изменяется в зависимости от частоты ШИМ, при типичной частоте ШИМ 50 кГц индуктивность может уменьшиться до 70 % от указанного значения. Часто добавляют дополнительные индуктивности в несколько десятков мкГн. Оптимальное значение индуктивности часто подтверждается экспериментально. Необходимо добавить дополнительные индуктивности, как показано на рис. 13.
Рисунок 13: Бесщеточный двигатель с дополнительной индуктивностью. Предоставлено: Portescap
Хотя это решение решит текущую проблему с пульсациями, может быть непросто интегрировать дополнительные индуктивности, особенно когда пространство ограничено. Поэтому часто целесообразно сначала изучить два других варианта.
ШИМ имеет много преимуществ и является наиболее широко используемым решением для бесколлекторных драйверов постоянного тока. Установка соответствующего напряжения ШИМ и использование высокой частоты ШИМ поможет уменьшить пульсации и избежать использования дополнительных индуктивностей. Сегодняшняя стоимость электронных компонентов делает простым решением использование высокой частоты ШИМ. Разработчики электроники должны учитывать эти параметры при разработке системы управления движением, когда важны размер и вес электроники (например, портативные устройства со встроенной электроникой) или когда срок службы батареи является ключевым критерием (дополнительная энергия, рассеиваемая джоулевыми потерями на внутреннее сопротивление). дополнительных индуктивностей).
Матье Буа, , инженер по приложениям, Portescap. Под редакцией Марка Т. Хоске, менеджера по содержанию, Control Engineering, CFE Media , [email protected].
КЛЮЧЕВЫЕ СЛОВА: Бесщеточные двигатели постоянного тока, широтно-импульсная модуляция
ПОСМОТРИТЕ ЭТО
Вы решаете проблемы выбора или разработки электроники с использованием бесщеточных двигателей с широтно-импульсной модуляцией (ШИМ)?
ОНЛАЙН
www.controleng.com/discrete-manufacturing/motors-drives
www.portescap.com
У вас есть опыт и знания по темам, упомянутым в этом содержании? Вам следует подумать о том, чтобы внести свой вклад в нашу редакционную команду CFE Media и получить признание, которого вы и ваша компания заслуживаете. Нажмите здесь, чтобы начать этот процесс.
Управление бесщеточным двигателем постоянного тока (BLDC)
1-5
из
10
документы
Сортировать поРелевантностиНовости/ДатаОт А до ЯОт Я до А
Примечание по применению
PDF Редакция 2 6 октября 2016 г.
2.1 MBAN5263АнглийскийПримечание по применению
PDFRev 018 февраля 20142.0 MBAN4870EnglishСвязанный файл:
AN4870SW
Примечание по применению
PDFRev 018 февраля 2014 г.
964.6 KBAN4862Английский,
中文Связанный файл:AN4862SW
Примечание по применению
PDFRev 019 июля 2013 г.514.4 KBAN4776Английский
Примечание по применению
PDFRev 0 30 ноября 20112.
2 MBAN4413EnglishСвязанный файл:AN4413SW
Примечание по применению
PDFRev 031 октября 2011 г. 796.7 KBAN4376Английский,
中文Примечание по применению
PDFRev 0.
0230 июля 2005579.5 KBAN2983АнглийскийБрошюра
PDFRev 0Dec 3, 2012451.8 KBBBCNTRLBLDCARTАнглийский
Брошюра
PDFRev 015 ноября 2012 г. 482.9 KBBBAPPSSMAPPLARTАнглийский
Брошюра
PDFRev 015 ноября 2012 г.