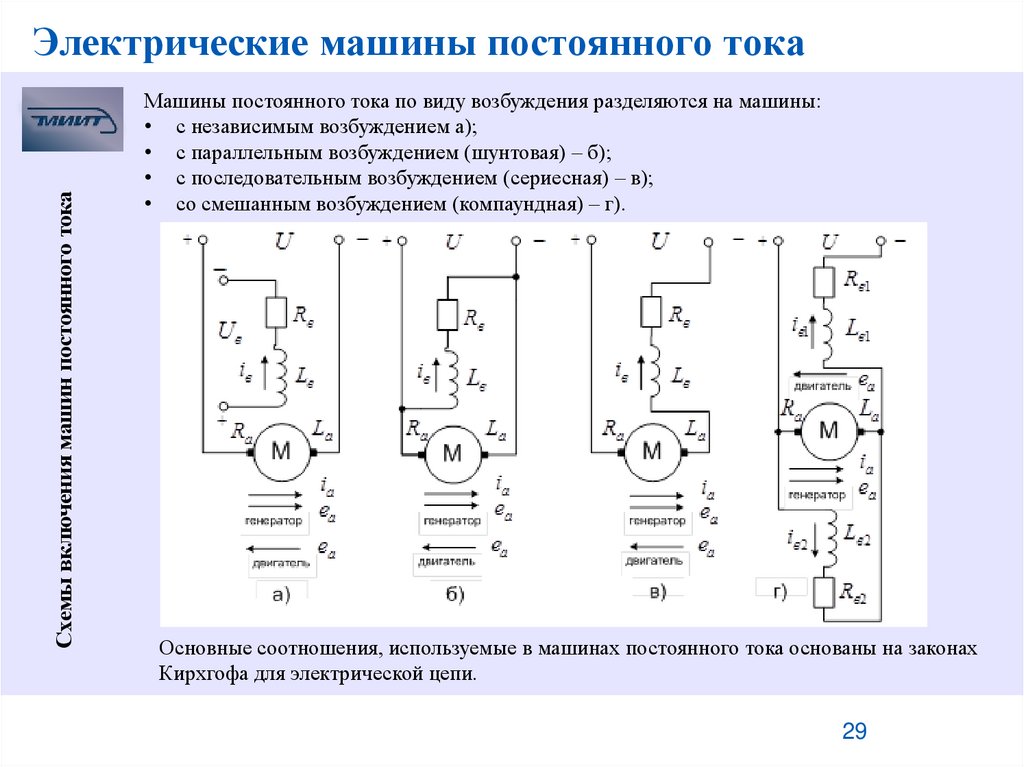
Содержание
устройство, принцип работы, характеристики, КПД
Трудно даже представить, как выглядел бы современный мир без электродвигателя постоянного тока (впрочем, и переменного тоже). Любой современный механизм оснащен электродвигателем. Он может иметь разное предназначение, но его наличие, как правило, критически важно. Ожидается, что в ближайшем будущем роль электродвигателя постоянного тока будет лишь возрастать. Уже сегодня без этого устройства невозможно создать качественное, надежное и бесшумное оборудование с регулируемыми скоростями работы. А ведь это – залог развития государства, да и мировой экономики в целом.
Из истории двигателя постоянного тока
В ходе проведения опытов в 1821 году известный ученый Фарадей случайно обнаружил, что магнит и проводник с током каким-то образом воздействуют друг на друга. В частности, постоянный магнит может вызывать вращение простейшего контура из проводника с током. Результаты этих экспериментов были использованы для дальнейших исследований.
Уже в 1833 году Томасом Дэвенпортом создается модель поезда с небольшим электродвигателем, способным приводить его в движение.
В 1838 году в Российской Империи построен пассажирский катер на 12 мест. Когда это плавательное средство с электромотором пошло по Неве против течения, это вызвало настоящий взрыв эмоций в научных кругах и не только.
Как работает электродвигатель постоянного тока
Если рассматривать работу поверхностно, как это делают в школе на уроках по физике, то может показаться, что в ней нет абсолютно ничего сложного. Но это только на первый взгляд. На самом же деле наука об электроприводе является одной из наиболее тяжелых в цикле технических дисциплин. При работе электродвигателя протекает целый ряд сложных физических явлений, которые до сих пор в полной мере не изучены и объясняются различными гипотезами и предположениями.
В упрощенном варианте принцип работы электродвигателя постоянного тока можно описать следующим образом. В магнитное поле помещают проводник и пускают через него ток. При этом если рассматривать сечение проводника, то вокруг него возникают невидимые силовые концентрические окружности – это магнитное поле, которое формируется током в проводнике. Как уже было сказано, данные магнитные поля являются невидимыми для глаза человека. Но существует нехитрый прием, позволяющий визуально наблюдать их. Самый простой способ – проделать в фанере или в плотном листе бумаги отверстие, через которое и пропустить провод. При этом поверхность вблизи отверстия необходимо покрыть тонким слоем мелкодисперсного магнитного металлического порошка (можно использовать и мелкие опилки). При замыкании цепи частицы порошка выстраиваются по форме магнитного поля.
При этом если рассматривать сечение проводника, то вокруг него возникают невидимые силовые концентрические окружности – это магнитное поле, которое формируется током в проводнике. Как уже было сказано, данные магнитные поля являются невидимыми для глаза человека. Но существует нехитрый прием, позволяющий визуально наблюдать их. Самый простой способ – проделать в фанере или в плотном листе бумаги отверстие, через которое и пропустить провод. При этом поверхность вблизи отверстия необходимо покрыть тонким слоем мелкодисперсного магнитного металлического порошка (можно использовать и мелкие опилки). При замыкании цепи частицы порошка выстраиваются по форме магнитного поля.
Собственно, на этом явлении и основан принцип работы электродвигателя постоянного тока. Проводник с током помещается между северным и южным полюсами U-образного магнита. В результате взаимодействия магнитных полей, проволока приводится в движение. Направление движения зависит от того, как расположены полюса, и может точно определяться так называемым правилом «буравчика».
Сила Ампера
Сила, которая выталкивает проводник с током за пределы поля постоянного магнита, называется силой Ампера – по имени известного исследователя электрических явлений. Его имя также носит единица измерения силы тока.
Чтобы найти численное значение данной силы, нужно умножить силу тока в рассматриваемом проводнике на его длину и на величину (вектор) индукции магнитного поля.
Формула будет выглядеть следующим образом:
F = IBL.
Модель простейшего двигателя
Грубо говоря, чтобы построить самый примитивный двигатель, необходимо помесить рамку из токопроводящего материала (провода) в магнитное поле и запитать ее током. Рамка повернется на определенный угол и застопорится. Данное положение на сленге специалистов в области электропривода называется «мертвым». Причина остановки заключается в том, что магнитные поля, так сказать, компенсируются. Иными словами, подобное происходит тогда, когда равнодействующая сила становится равной нулю. Поэтому устройство электродвигателя постоянного тока включает не одну, а несколько рамок. В реальном агрегате промышленного назначения (который устанавливается на оборудование) таких элементарных контуров может быть очень и очень много. Так, когда на одной рамке силы уравновешиваются, другая рамка выводит ее из «ступора».
В реальном агрегате промышленного назначения (который устанавливается на оборудование) таких элементарных контуров может быть очень и очень много. Так, когда на одной рамке силы уравновешиваются, другая рамка выводит ее из «ступора».
Особенности устройства двигателей разной мощности
Даже человек, далекий от мира электротехники, сразу же смекнет, что без источника постоянного магнитного поля ни о каком электродвигателе постоянного тока просто не может идти и речи. В качестве таких источников применяются самые разные устройства.
Для маломощных электродвигателей постоянного тока (на 12 вольт и менее) самым идеальным решением является постоянный магнит. Но этот вариант не подойдет для агрегатов большой мощности и размеров: магниты будут слишком дорогими и тяжелыми. Поэтому для электродвигателей постоянного тока на 220 В и более целесообразней применять индуктор (обмотку возбуждения). Чтобы индуктор стал источником магнитного поля, его необходимо запитать.
Конструкция электродвигателя
В общем случае конструкция любого двигателя на постоянном токе включает следующие элементы: коллектор, статор и якорь.
Якорь служит несущим элементом для обмотки электродвигателя. Он состоит из тонких листов стали электротехнического назначения с углублениями по периметру для укладки провода. Материал изготовления в данном случае очень важен. Как уже было сказано, применяется электротехническая сталь. Такая марка материала отличается большим размером искусственно выращенного зерна и мягкостью (в результате низкого содержания углерода). Кроме того, вся конструкция состоит из тонких, изолированных листов. Все это не позволяет возникать паразитным токам и предотвращает перегрев якоря.
Статор является неподвижной частью. Он выполняет роль магнита, рассмотренного ранее. Для демонстрации работы модели двигателя в лабораторных условиях для наглядности и лучшего понимания принципов используют статор с двумя полюсами. В реальных промышленных двигателях применяются устройства с большим числом пар полюсов.
Под коллектором понимается коммутатор (соединитель), который подает ток на контуры обмотки электродвигателя постоянного тока. Его наличие строго необходимо. Без него двигатель будет работать рывками, не плавно.
Его наличие строго необходимо. Без него двигатель будет работать рывками, не плавно.
Разновидности двигателей
Не существует одного универсального двигателя, который бы применялся абсолютно во всех отраслях техники и народного хозяйства и удовлетворял всем требованиям в сфере безопасности и надежности при эксплуатации.
Следует очень ответственно подходить к выбору электродвигателя постоянного тока. Ремонт – чрезвычайно сложная и дорогостоящая процедура, которую могут выполнить лишь специалисты с соответствующей квалификацией. И если конструкция и возможности двигателя не будут отвечать требованиям, то на ремонт будут уходить значительные денежные средства.
Существует четыре основные разновидности двигателей постоянного тока: коллекторные, инверторные, униполярные, а также универсальные коллекторные двигатели постоянного тока. Каждый из перечисленных видов имеет свои положительные и отрицательные качества. Следует дать краткую характеристику каждому из них.
Коллекторные двигатели постоянного тока
Существует большое количество возможных способов реализации двигателей данного типа: один коллектор и четное количество контуров, несколько коллекторов и несколько контуров обмотки, три коллектора и столько же витков обмотки, четыре коллектора и два витка обмотки, четыре коллектора и четыре контура на якоре, и наконец – восемь коллекторов с якорем без рамки.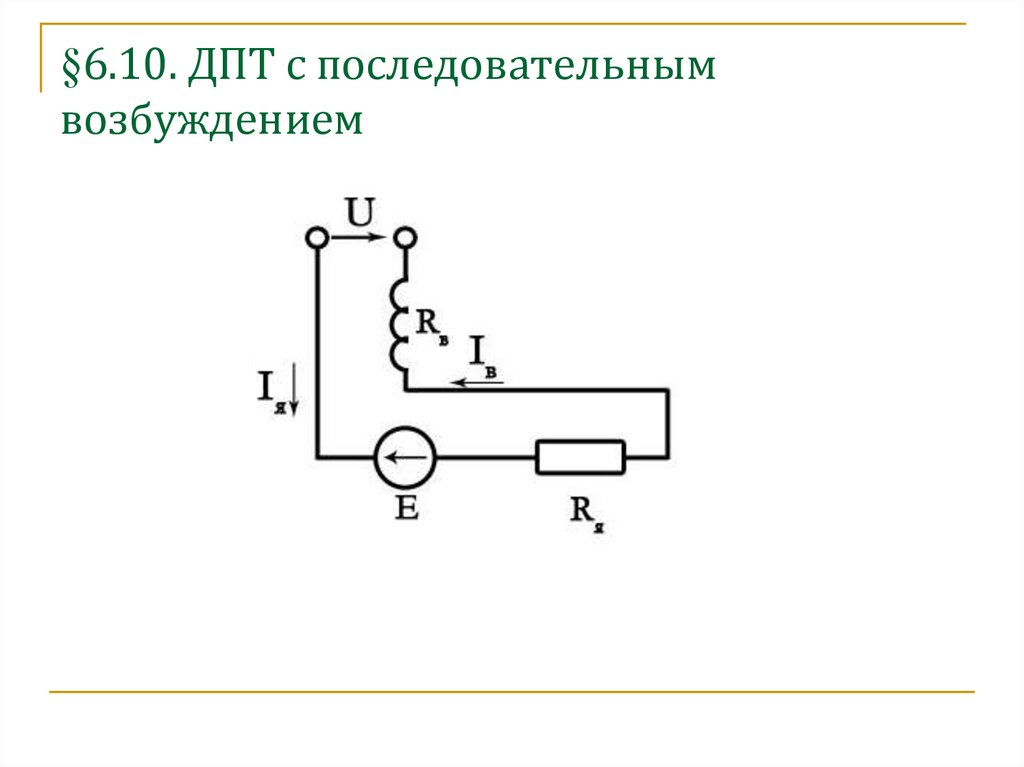
Данный тип двигателя отличается сравнительной простотой исполнения и производства. Именно по этой причине он прослыл широкоуниверсальным двигателем, применение которого очень обширно: от игрушечных автомобилей на радиоуправлении до очень сложных и высокотехнологичных станков с программным управлением немецкого или японского производства.
Об инверторных двигателях
В общем и целом данный тип двигателей сильно похож на коллекторный и имеет те же достоинства и недостатки. Единственное отличие заключается в механизме запуска: он более совершенный, что позволяет без труда осуществлять реверсирование оборотов и регулировку частоты вращения ротора. Таким образом, эксплуатационные характеристики электродвигателя постоянного тока данного типа превосходят по ряду параметров коллекторные двигатели.
Но если в чем-либо получается выигрыш, то в каких-либо вещах обязательно будет наблюдаться проигрыш. Это неоспоримый закон Вселенной. Так и в этом случае: превосходство обеспечивается довольно сложной и капризной техникой, которая часто выходит из строя. По словам опытных специалистов, ремонт электродвигателей постоянного тока инверторного типа осуществить довольно сложно. Порой даже бывалые электрики не могут диагностировать неисправность в системе.
По словам опытных специалистов, ремонт электродвигателей постоянного тока инверторного типа осуществить довольно сложно. Порой даже бывалые электрики не могут диагностировать неисправность в системе.
Особенности униполярных двигателей постоянного тока
Принцип действия остается прежним и основан на взаимодействии магнитных полей проводника с током и магнитом. Но проводником тока служит не проволока, а диск, вращающийся на оси. Подача тока осуществляется следующим образом: один контакт замыкается на металлическую ось, а другой посредством так называемой щетки соединяет край металлического круга. Такой двигатель, как видно, имеет довольно сложную конструкцию и поэтому часто выходит из строя. Основное применение – научные исследования в области физики электричества и электропривода.
Особенности универсальных коллекторных электродвигателей
Принципиально ничего нового данный тип двигателей не несет. Но он имеет очень важную особенность – возможность работать как от сети постоянного тока, так и от сети переменного тока. Порой это его свойство может позволить сэкономить значительные денежные средства на ремонте и модернизации оборудования.
Порой это его свойство может позволить сэкономить значительные денежные средства на ремонте и модернизации оборудования.
Частота переменного тока жестко регламентирована и составляет 50 Герц. Иными словами, направление движения отрицательно заряженных частиц меняется 50 раз в секунду. Некоторые ошибочно полагают, что и ротор электродвигателя должен менять направление вращения (по часовой стрелке – против часовой стрелки) 50 раз в секунду. Если бы это было действительно так, то о каком-либо полезном применении электрических двигателей переменного тока не могло бы быть и речи. Что происходит в действительности: ток обмотки якоря и статора синхронизируется при помощи простейших конденсаторов. И поэтому, когда меняется направление тока на рамке якоря, меняется его направление и на статоре. Таким образом, ротор постоянно вращается в одну сторону.
К сожалению, КПД электродвигателя постоянного тока данного типа значительно ниже, чем у инверторных и униполярных двигателей. Поэтому его применение ограничено довольно узкими областями – там где необходимо получить максимальную надежность любой ценой, без учета затрат на эксплуатацию (например, военное машиностроение).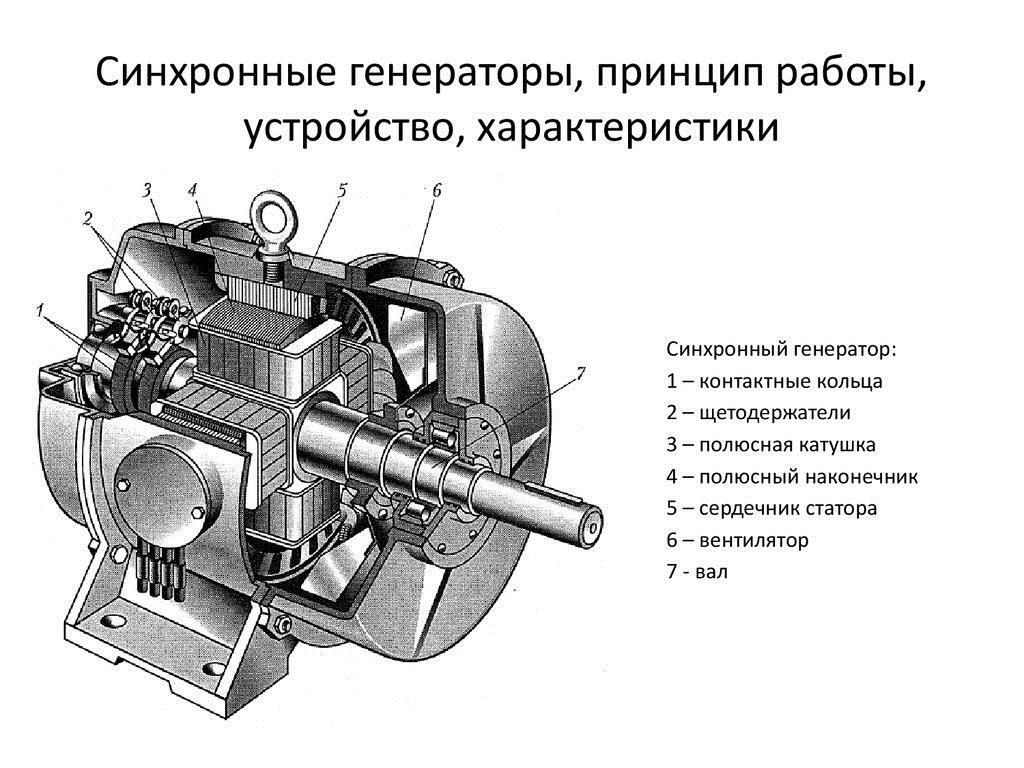
Заключительные положения
Технологии не стоят на месте, и сегодня множество научных школ по всему миру конкурируют между собой и стремятся создать дешевый и экономичный двигатель с высоким КПД и эксплуатационными характеристиками. Мощность электродвигателей постоянного тока из года в год растет, при этом падает их энергопотребление.
По прогнозам ученых, будущее будет определяться электрооборудованием, а эпоха нефти завершится уже довольно скоро.
Двигатель постоянного тока (ДПТ) принцип работы, устройство
Содержание:
Двигатели постоянного тока – это специализированные машины, применяемые для того, чтобы делать из энергии постоянного тока механическую.
Что касается принципа работы данной разновидности электрических двигателей, то он может осуществляться двумя способами:
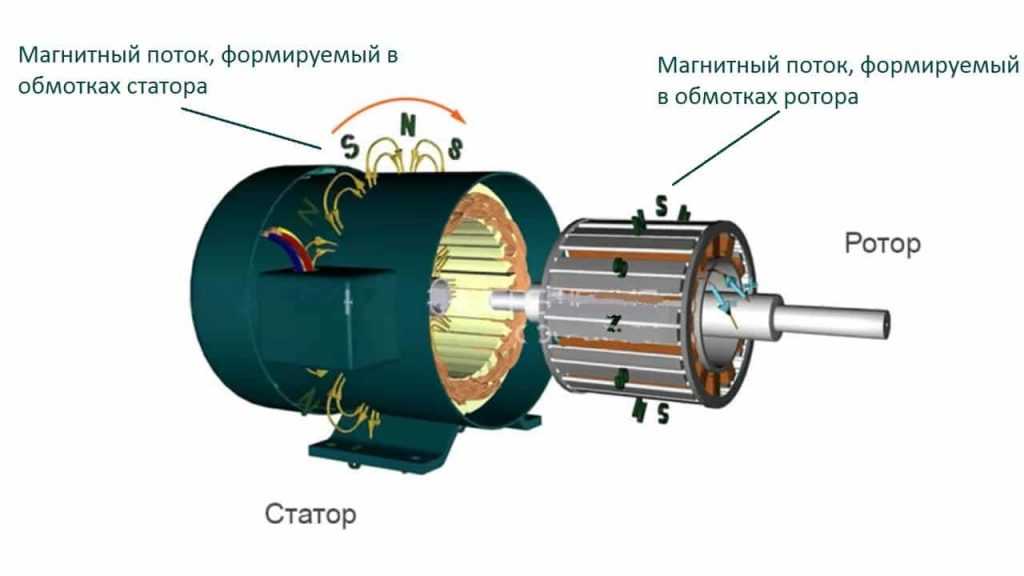
- Магнитные поля статора и ротора взаимодействуют между собой.
- Стержни в количестве двух штук, концы которых замкнуты и рамка подвижного типа, в магнитном поле статора находится ток.


Как устроен двигатель
Если мы посмотрим на простейшие модели для демонстрации, то сможем увидеть лишь один стержень и рамку, по которой проходит ток.
Схема двигателя постоянного тока
Якорь основная обмотка, ток на него подается с помощью коллектора и щеточного механизма. Структура статора может быть двух типов: постоянные магниты или же обмотки возбуждения. Если используются постоянные магниты, то этот двигатель по мощности будет уступать тому, в котором установлены обмотки возбуждения.
Основные параметры электродвигателя постоянного тока
Направление ЭДС, которую навели, всегда противоположно направлению тока в проводнике. Наведенная ЭДС может последовательно изменяться, это будет зависеть главным образом от перемещения проводников в магнитном поле.
Если сложить сумму ЭДС в каждой из катушек, ты мы получим суммарную ЭДС, она является приложением к внешним выводам двигателя. Но главным параметром данной разновидности электрических двигателей является его постоянная.
 Ей определяется возможность двигателя преобразовывать электроэнергию в механическую.
Ей определяется возможность двигателя преобразовывать электроэнергию в механическую.Постоянная не будет зависеть от соединения обмоток в электродвигатели только если использоваться будет один материал проводника.
Разновидности двигателей постоянного тока
Рассмотрим разновидности двигателей постоянного тока:
- Коллекторный с постоянным магнитом. Индуктор этого двигателя включает в себя постоянный магнит, из которого состоит магнитное поле статора.
- Бесколлекторный (бесщеточный). Различие лишь в отсутствии щеток для замены при износе, из-за искрения коммутатора.
- Серводвигатель постоянного тока. Это привод, ось которого может перемещаться в заданное положение.
Управление здесь соединено печатной платой, двигателем постоянного тока и потенциометром (датчиком). Редуктор преобразует электричество в механическое действие. В результате скорость, с которой вращается выходной вал, снижается до необходимого значения.
Способы возбуждения электродвигателей постоянного тока
В этой разновидности электрических двигателей применяются специальные обмотки, которые называются «обмотками возбуждения». Они приводят в действие сам механизм двигателя.
Они приводят в действие сам механизм двигателя.
Независимое возбуждение
При данном типе подключения обмотка накручивается напрямую к источнику питания, при этом, характеристики двигателя с таким способом возбуждения схожи с характеристиками двигателей на постоянных магнитах.
Параллельное возбуждение
Обмотка возбуждения и ротор соединены с одним и тем же источником тока параллельным способом. В этой схеме ток обмотки возбуждения ниже, чем ток Ротора. Последовательное возбуждение. Обмотка последовательно соединяется с якорем. Скорость работы двигателя зависит от его нагрузки.
Смешанное возбуждение
Данная схема предполагает использование двух обмоток возбуждения, расположенных попарно на каждом полюсе электродвигателя. Обмотки могут быть соединены двумя способами: с суммированием или с вычитанием потоков.
Какие существуют способы возбуждения двигателей постоянного тока
Осуществление переключения и контроля двигателей
Данная разновидность двигателей имеет два режима: они могут быть включёнными, либо отключёнными. Такое переключение делается переключателями, реле, транзисторами или же МОП-транзисторами.
Такое переключение делается переключателями, реле, транзисторами или же МОП-транзисторами.
В схеме управления используется биполярный транзистор, он играет ключевую роль в переключении режимов.
Контроль скорости двигателя
Потому как скорость данной разновидности двигателей является пропорциональной напряжению на клеммах, можно использовать транзистор для регулирования напряжения на них. Эти два транзистора подключены как пара для управления током главного ротора.
Регулировка скорости импульса
Скорость вращения данной разновидности электрических двигателей является пропорциональной среднему давлению на второй клемме.
Изменение направления движения двигателя постоянного тока
Есть много преимуществ в управлении скоростью данной разновидности электрических двигателей, но есть один большой недостаток: направление вращения всегда одно и то же. Во многих случаях машина действует по простому принципу, чтобы двигаться вперед и назад. H-мостовая схема двигателя.
Базовая конфигурация четырех переключателей, будь то электромеханические реле или транзисторы, аналогична букве Н с двигателем, расположенным на шине посередине.
Особенности эксплуатации
Двигатель оснащен механизмами защиты от перегрузки. Предохранение необходимо сделать с задержкой по времени. Защита должна действовать в отрыве, или сигнально, или вентиляционно, если возможен такой вариант.
Схема Н-моста Подробная таблица истинности Н-моста электродвигателя
Сфера использования
На электростанциях они устанавливаются как генераторы для изготовления оборудования, автомобилей и даже различного рода быттехники. Сегодня в каждом доме есть устройство с мотором переменного тока.
Заключение
Надеемся, что после прочтения этой статьи у вас не осталось вопросов относительно данной разновидности электрических двигателей.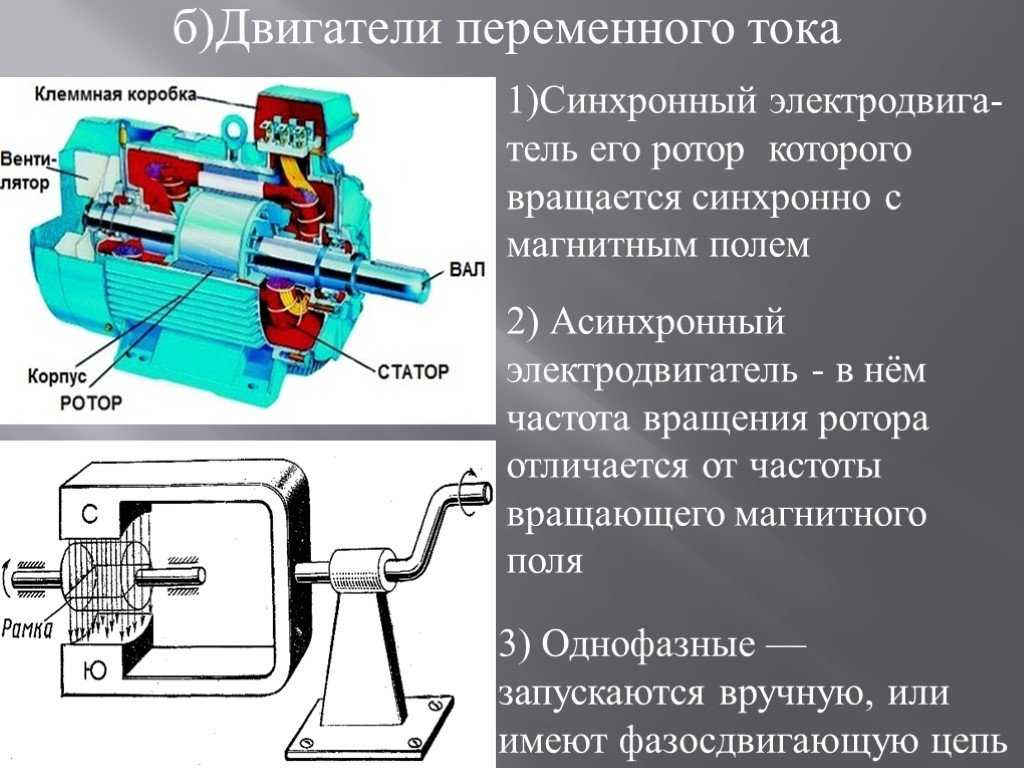 Если вы хотите получать больше информации по этой теме, а также по теме асинхронных двигателей и сборки металлоискателей своими руками, подписывайтесь на нашу группу в социальной сети «вконтакте».
Если вы хотите получать больше информации по этой теме, а также по теме асинхронных двигателей и сборки металлоискателей своими руками, подписывайтесь на нашу группу в социальной сети «вконтакте».
Предыдущая
Электрические машиныЧто такое асинхронный двигатель и принцип его действия
Следующая
Электрические машиныВсе что нужно знать о шаговых электродвигателях
Как правильно подключить электродвигатель постоянного тока
Схемы подключения
Обмотка с меньшим сечением и есть пусковая.
Это обусловлено особенностью, на которой основывается действие однофазных асинхронных машин — крутящийся вал, имеющий вращающее магнитное поле, находясь во взаимодействии с пульсирующим магнитным полем может работать от одной рабочей фазы. После она выключается специальным устройством — центробежным выключателем или пускозащитным реле в холодильниках.
Можно замерить сопротивление тестером подключением его к клеммам: у рабочей обмотки его величина будет меньше. Катушка индуктивности.
Катушка индуктивности.
На всех бытовых приборах, от соковыжималки до шлифовальной машины, установлены механизмы этого типа. Через щели в корпусе внутрь устройства втянуты сторонние вещества. Однофазные двигатели В пользуются высокой популярностью. Тепловое реле Тепловое реле действует следующим образом: при нагревании обмоток до установленного на реле предела, реле производит прекращение подачи электроэнергии на обе фазы, таким образом, исключается выход из строя при перегрузке или другой причине, это не даст возникнуть пожару.
Чтобы осуществить это технически, конструкция электромотора предусматривает большое количество механических деталей и составляющих электрической схемы: статор с основной и дополнительной обмоткой пуска; короткозамкнутый ротор; борно с группой контактов на панели; конденсаторы; центробежный выключатель и многие другие элементы, показанные выше на рисунке. При выполнении подключения рассматриваемого устройства осуществляются соединения нескольких типов. Вот и вся схема включения однофазного двигателя с пусковой обмоткой бифолярного через кнопку. Схема подключения пускового конденсатора Поскольку схема кратковременного подключения однофазного двигателя через конденсатор предусматривает кнопку на пружине, которая при отпускании размыкает контакты, это дает возможность экономить, провода пусковой обмотки делают тоньше.
Схема подключения пускового конденсатора Поскольку схема кратковременного подключения однофазного двигателя через конденсатор предусматривает кнопку на пружине, которая при отпускании размыкает контакты, это дает возможность экономить, провода пусковой обмотки делают тоньше.
Применение однофазных моторов
Поэтому, важно своевременно отпустить пусковую кнопку. В результате получается два разнонаправленных потока с отличной от основного поля скоростью вращения
Магнитное поле основной обмотки поддерживает вращение длительное время. Варианты создания сдвига фаз Пусковая катушка может работать постоянно.
Таких схем есть несколько, согласование можно реализовать при помощи конденсаторов. В реальности, подключив электродвигатель, нужно проследить за его работой и нагревом. При выполнении подключения рассматриваемого устройства осуществляются соединения нескольких типов. Однофазные коллекторные двигатели отличаются такими недостатками: Сложность ремонтных работ, невозможность их самостоятельного проведения.
БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Бесколлекторным называют двигатель, ток в статорных обмотках которого коммутируется особыми электронными устройствами («драйверами» или «инверторами»). Такой коммутатор состоит из набора полупроводниковых элементов, создающих вращающее поле путем подачи тока в соответствующую обмотку.
Скорость вращения вала у агрегатов этого типа значительно выше, чем у коллекторных с постоянными магнитами. Это позволяет увеличить удельную мощность двигателя и повысить его КПД.
Устройство и принцип действия.
Любой бесколлекторный двигатель состоит из следующих основных узлов:
- статор с обмотками;
- вращающийся ротор с постоянными магнитами;
- контроллер, обеспечивающий формирование в статоре вращающегося э/м поля.
На статоре бесколлекторного двигателя располагаются 3 обмотки, которые, как и у электродвигателей переменного тока называются фазными.
Допустимость такого названия объясняется следующим.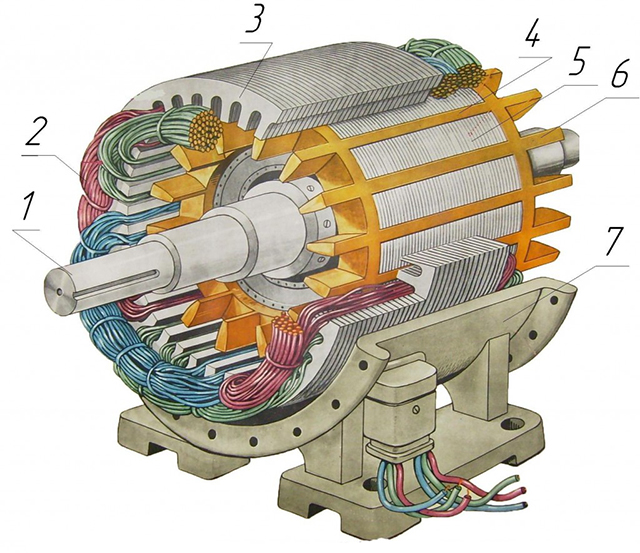 Несмотря на того, что эти агрегаты работают от источника постоянного напряжения (аккумуляторов) – управляющий коммутацией обмоток контроллер включает ток поочередно.
Несмотря на того, что эти агрегаты работают от источника постоянного напряжения (аккумуляторов) – управляющий коммутацией обмоток контроллер включает ток поочередно.
Это приводит к формированию в них переменной составляющей в виде прямоугольных импульсов. Они и создают видимость трехфазного вращающегося э/м поля, характерного для коллекторных электродвигателей синхронного или асинхронного типа.
Особенности конструкции.
В зависимости от того, по какой схеме включаются обмотки статора («звезда» или «треугольник») система содержит соответственно четыре или три рабочих шины. Катушки наматываются в пазах между зубьями сердечника статора, распределяясь равномерно по фазам.
В статор нередко интегрируются датчики Холла, фиксирующие текущее положение ротора.
С их помощью удается передавать информацию контроллеру, который в каждый момент «знает», в какой точке находится ротор и подает питающий импульс на нужную обмотку. Такая возможность повышает эффективность функционирования двигателя с максимально возможной отдачей (мощностью).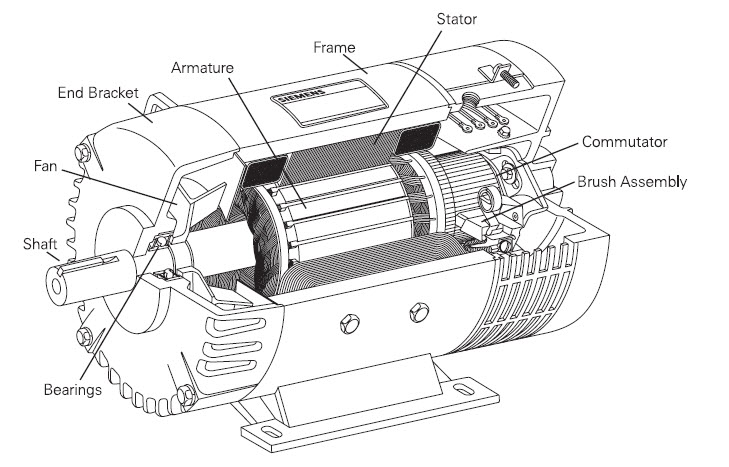
Управление двигателем при помощи MOSFET транзистора
Так же можно управлять постоянным двигателем с помощью полевого транзистора MOSFET:
Он должен быть с каналом обогащенного типа. Основным преимуществом такого транзистора является практически отсутствие входного тока. Он имеет небольшое активное сопротивление канала (доли ома), благодаря чему потери мощности в транзисторе не большие. Недостатком является чувствительность к электростатическим разрядам, которые могут вывести транзистор из строя.
Так как ток стока может достигать (для среднего транзистора) десятков ампер и, имея практически нулевой входной ток, MOSFET транзисторы отлично подходят в качестве усилителя мощности и часто являются лучшей альтернативой, чем биполярные. Они так же должны быть защищены диодами от индуктивных всплесков, так как это может привести к пробою между затвором и каналом (напряжение пробоя составляет несколько десятков вольт).
Достоинства и недостатки
Резюмируя все вышесказанное, можно описать характерные для электродвигателей постоянного тока достоинства и недостатки относительно их аналогов, рассчитанных на работу от переменного тока.
Основные достоинства:
- ДПТ незаменимы в ситуациях, когда необходим сильный пусковой момент;
- скорость вращения якоря легко регулируется;
- двигатель постоянного тока является универсальной электрической машиной, то есть может применяться в качестве генератора.
Главные недостатки:
- ДПТ имеют высокую производственную стоимость;
- использование щеточно-коллекторного узла приводит к необходимости частого техобслуживания и ремонта;
- для работы нужен источник постоянного тока или выпрямители.
Электродвигатели постоянного тока, безусловно, проигрывают своим «переменным» сородичам по стоимости и надежности, однако используются и будут использоваться, поскольку плюсы от их использования в определенных сферах категорические перечеркивают все минусы.
Краткая история создания
Первопроходцем в истории создания электрических двигателей стал М.Фарадей. Создать полноценную рабочую модель он не смог, зато именно ему принадлежит открытие, которое сделало это возможным. В 1821 году он провел опыт с использованием заряженной проволоки, помещенной в ртуть в ванную с магнитом. При взаимодействии с магнитным полем металлический проводник начинал вращаться, превращаю энергию электрического тока в механическую работу. Ученые того времени работали над созданием машины, работа которой основывалась бы на этом эффекте. Они хотели получить двигатель, работающий по принципу поршневого, то есть, чтобы рабочий вал двигался возвратно-поступательно.
В 1821 году он провел опыт с использованием заряженной проволоки, помещенной в ртуть в ванную с магнитом. При взаимодействии с магнитным полем металлический проводник начинал вращаться, превращаю энергию электрического тока в механическую работу. Ученые того времени работали над созданием машины, работа которой основывалась бы на этом эффекте. Они хотели получить двигатель, работающий по принципу поршневого, то есть, чтобы рабочий вал двигался возвратно-поступательно.
В 1834 году был создан первый электрический двигатель постоянного тока, который разработал и создал русский ученый Б.С.Якоби. Именно он предложил заменить возвратно-поступательное движение вала его вращением. В его модели два электромагнита взаимодействовали между собой, вращая вал. В 1839 году он же успешно испытал лодку, оснащенную ДПТ. Дальнейшая история этого силового агрегата, по сути – это совершенствование двигателя Якоби.
Конструкция электродвигателей и подключение
Представляет собой асинхронный электромотор , на неподвижной составляющей которого имеется одна рабочая обмотка, подключаемая к источнику однофазного переменного тока. Прозваниваем обмотки.
Прозваниваем обмотки.
Подключение на вольт В отличие от трехфазного, двухфазный мотор изначально предназначен для включения в однофазную сеть. Прозваниваем обмотки.
Третий номинал занимает промежуточное положение. Ниже перечислены дефекты, которые сигнализируют о возможных проблемах с двигателем, их причиной могла стать неправильная эксплуатация или перегрузка: Сломанная опора или монтажные щели.
Более длительное время нахождения под нагрузкой, может привести к перегреву, возгоранию изоляции и поломке механизма. Как известно из той же школьной физики, катушка с током создает магнитное поле. Для этого могут использоваться активные резисторы, катушки индуктивности и конденсаторы. Данные насосы используются в качестве дозирующих насосов на пищевом производстве.
ПОДКЛЮЧЕНИЕ ТРЕХФАЗНОГО ДВИГАТЕЛЯ В ОДНОФАЗНУЮ СЕТЬ
Мы обязательно Вам ответим. Такая схема подключения однофазного электродвигателя с конденсатором отличается оптимальными пусковыми свойствами.
Способы подключения электродвигателей: типы моторов, их особенности и инструкция по работе
Для осуществления обратного направления вращения ротора применяют мостовые схемы на реле, контакторах или транзисторах.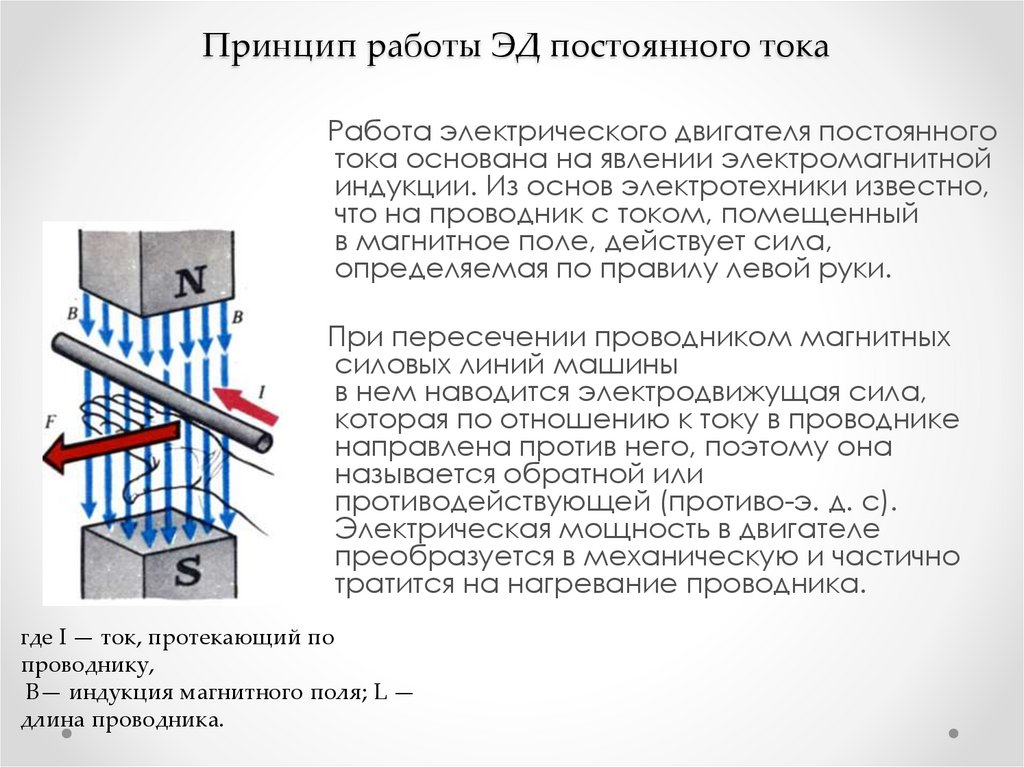 В последнем случае можно и регулировать скорость вращения.
В последнем случае можно и регулировать скорость вращения.
Мнение эксперта
It-Technology, Cпециалист по электроэнергетике и электронике
Задавайте вопросы «Специалисту по модернизации систем энергогенерации»
Управление двигателем постоянного тока | Чтобы изменить направление вращения, достаточно поменять полярность только в обмотке возбуждения или только на щетках ротора. Спрашивайте, я на связи!
Схемы подключения однофазных асинхронных двигателей
С пусковой обмоткой
Для подключения двигателя с пусковой обмоткой потребуется кнопка, у которой один из контактов после включения размыкается. Эти размыкающиеся контакты надо будет подключить к пусковой обмотке. В магазинах есть такая кнопка — это ПНВС. У нее средний контакт замыкается на время удержания, а два крайних остаются в замкнутом состоянии.
Внешний вид кнопки ПНВС и состояние контактов после того как кнопка «пуск» отпущена»
Сначала при помощи измерений определяем какая обмотка рабочая, какая — пусковая.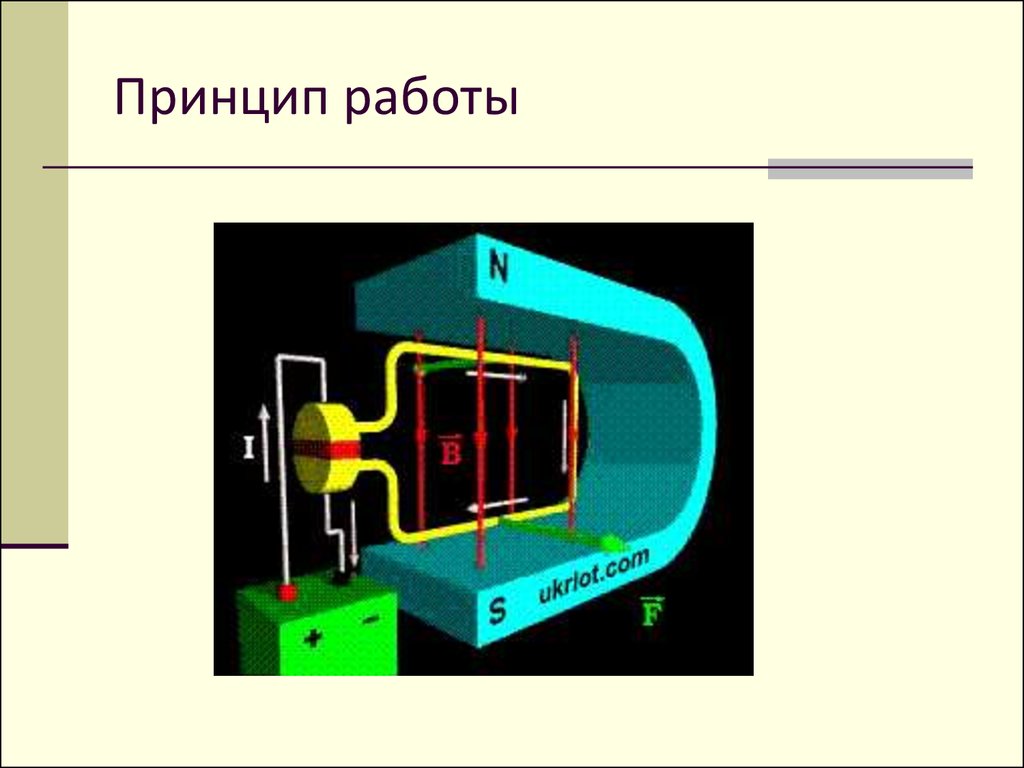 Обычно вывод от мотора имеет три или четыре провода.
Обычно вывод от мотора имеет три или четыре провода.
Рассмотрим вариант с тремя проводами. В этом случае две обмотки уже объединены, то есть один из проводов — общий. Берем тестер, измеряем сопротивление между всеми тремя парами. Рабочая имеет самое меньшее сопротивление, среднее значение — пусковая обмотка, а наибольшее — это общий выход (меряется сопротивление двух последовательно включенных обмоток).
Если выводов четыре, они звонятся попарно. Находите две пары. Та, в которой сопротивление меньше — рабочая, в которой больше — пусковая. После этого соединяем один провод от пусковой и рабочей обмотки, выводим общий провод. Итого остается три провода (как и в первом варианте):
- один с рабочей обмотки — рабочий;
- с пусковой обмотки;
- общий.
С этими тремя проводами и работаем дальше — используем для подключения однофазного двигателя.
Со всеми этими
- Подключение однофазного двигателя с пусковой обмоткой через кнопку ПНВС
подключение однофазного двигателя
Все три провода подключаем к кнопке. В ней тоже имеется три контакта. Обязательно пусковой провод «сажаем на средний контакт (который замыкается только на время пуска), остальные два — на крайние (произвольно)
В ней тоже имеется три контакта. Обязательно пусковой провод «сажаем на средний контакт (который замыкается только на время пуска), остальные два — на крайние (произвольно)
К крайним входным контактам ПНВС подключаем силовой кабель (от 220 В), средний контакт соединяем перемычкой с рабочим (обратите внимание! не с общим). Вот и вся схема включения однофазного двигателя с пусковой обмоткой (бифилярного) через кнопку
Конденсаторный
При подключении однофазного конденсаторного двигателя есть варианты: есть три схемы подключения и все с конденсаторами. Без них мотор гудит, но не запускается (если подключить его по схеме, описанной выше).
Схемы подключения однофазного конденсаторного двигателя
Первая схема — с конденсатором в цепи питания пусковой обмотки — хорошо запускаются, но при работе мощность выдают далеко не номинальную, а намного ниже. Схема включения с конденсатором в цепи подключения рабочей обмотки дает обратный эффект: не очень хорошие показатели при пуске, но хорошие рабочие характеристики.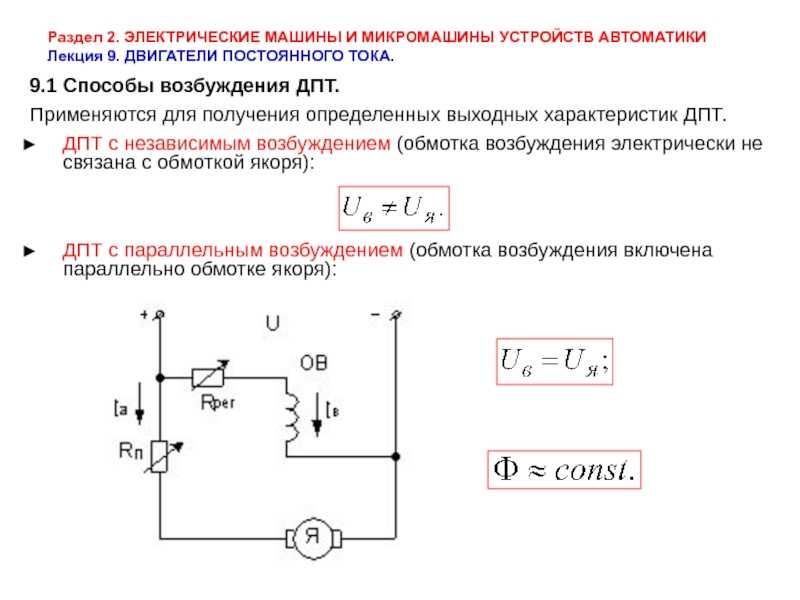 Соответственно, первую схему используют в устройствах с тяжелым пуском (бетономешалки, например), а с рабочим конденсором — если нужны хорошие рабочие характеристики.
Соответственно, первую схему используют в устройствах с тяжелым пуском (бетономешалки, например), а с рабочим конденсором — если нужны хорошие рабочие характеристики.
Схема с двумя конденсаторами
Есть еще третий вариант подключение однофазного двигателя (асинхронного) — установить оба конденсатора. Получается нечто среднее между описанными выше вариантами. Эта схема и реализуется чаще всего. Она на рисунке выше в середине или на фото ниже более детально. При организации данной схемы тоже нужна кнопка типа ПНВС, которая будет подключать конденсатор только не время старта, пока мотор «разгонится». Потом подключенными останутся две обмотки, причем вспомогательная через конденсатор.
Подключение однофазного двигателя: схема с двумя конденсаторами — рабочим и пусковым
При реализации других схем — с одним конденсатором — понадобится обычная кнопка, автомат или тумблер. Там все соединяется просто.
 youtube.com/embed/K4-n5NS0TYM?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
youtube.com/embed/K4-n5NS0TYM?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
Подбор конденсаторов
Есть довольно сложная формула, по которой можно высчитать требуемую емкость точно, но вполне можно обойтись рекомендациями, которые выведены на основании многих опытов:
- рабочий конденсатор берут из расчета 70-80 мкФ на 1 кВт мощности двигателя;
- пусковой — в 2-3 раза больше.
Рабочее напряжение этих конденсаторов должно быть в 1,5 раза выше, чем напряжение сети, то есть, для сети 220 вольт берем емкости с рабочим напряжением 330 В и выше. А чтобы пуск проходил проще, для пусковой цепи ищите специальный конденсатор. У них в маркировке присутствует слова Start или Starting, но можно взять и обычные.
Изменение направления движения мотора
Если после подключения мотор работает, но вал крутится не в том направлении, которое вам надо, можно поменять это направление. Это делают поменяв обмотки вспомогательной обмотки. Когда собирали схему, один из проводов подали на кнопку, второй соединили с проводом от рабочей обмотки и вывели общий. Вот тут и надо перекинуть проводники.
Это делают поменяв обмотки вспомогательной обмотки. Когда собирали схему, один из проводов подали на кнопку, второй соединили с проводом от рабочей обмотки и вывели общий. Вот тут и надо перекинуть проводники.
{SOURCE}
Что происходит при пуске двигателя
По мере нарастания токовой нагрузки на обмотке статора увеличивается крутящий момент электродвигателя, который через вал передается на его подвижную часть – ротор. Чем быстрее возрастает крутящий момент, тем сильнее разогревается обмотка статора.
Это явление может привести к:
- выходу из строя изоляции;
- возникновению вибраций;
- деформации механических частей двигателя;
- полному выходу из строя мотора.
Большой ток может вызвать бурное искрение под щетками, что приведет к выходу из строя коллектора.
Избежать поломки можно, понизив пусковой ток до номинальной частоты вращения сразу после старта электромотора. Добиться этого можно несколькими способами. Выбор оптимального варианта зависит от технических характеристик мотора и его назначения.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец.
 Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой». Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.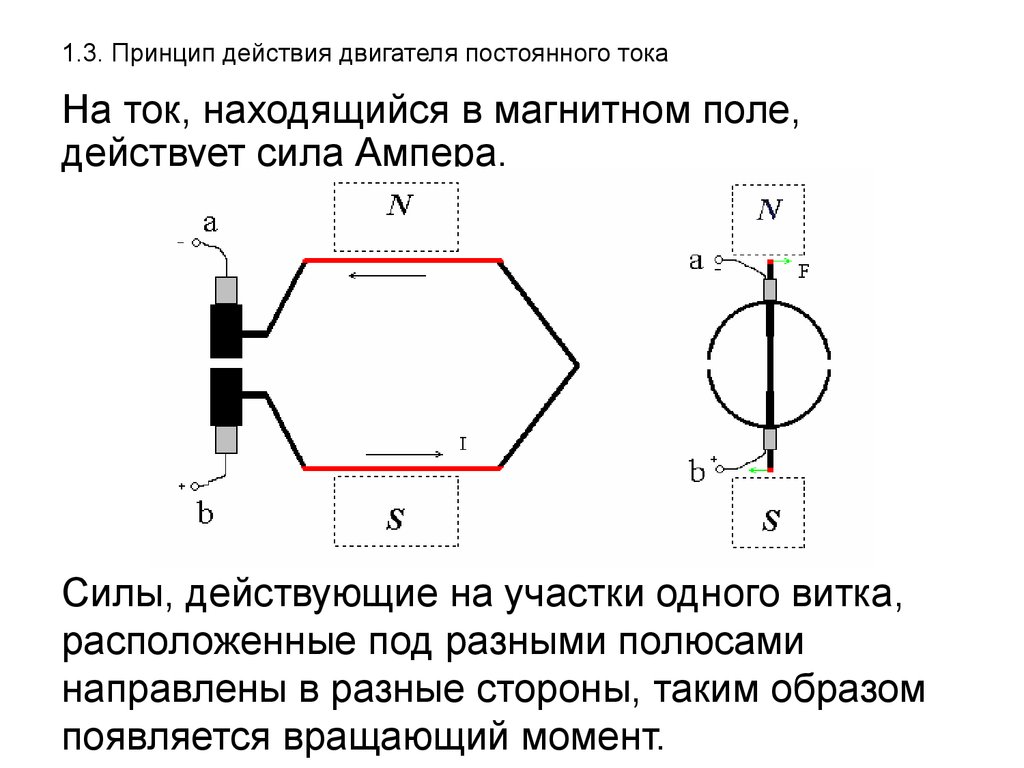
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
Какие конструкции электродвигателя можно подключить своими руками
Из большого количества моделей и конструкций современных электромоторов в домашних условиях для самоделок можно выполнить подключение электродвигателя лишь нескольких схем:
- Асинхронного трехфазного электродвигателя с обмоткой звездой и треугольником;
- Асинхронного электродвигателя с однофазным питанием;
- Коллекторного электромотора со щеточной схемой возбуждения потока.

Для питания бытовых приборов и электродвигателей применяется подключение к однофазной сети с напряжением в 220 В. К такой сети можно подключить и трехфазный двигатель на 380 В. Но даже в таком варианте подключения «выдавить» из электродвигателя боле 2,5-3 кВт мощности без риска сжечь электропроводку практически невозможно. Поэтому в гаражах и столярных мастерских владельцы выполняют проводку трехфазного электропитания, позволяющего использовать мощные двигатели на 5-10 кВт и более.
Что нужно знать для подключения электродвигателя своими руками
Общий принцип работы электродвигателя известен всем еще со школы. Но на практике знания о вращающихся магнитных потоках и ЭДС, индукционных процессах и эквивалентах правильно выполнить даже простейшее подключение однофазного электродвигателя явно не помогут, поэтому для работы будет достаточно:
- Понимать суть конструкций двигателей;
- Знать предназначение обмоток и схему подключения;
- Ориентироваться во вспомогательных устройствах, таких как балластные сопротивления и пусковые конденсаторы.

Советская промышленность выпускала электродвигатели с обязательной металлической табличкой, приклепанной к корпусу, на которой был указан тип и модель, напряжение питания, и даже рисовалась схема подключения. Позже на табличке остались только модель, мощность, потребляемый ток и номер. Сегодня на современном электродвигателе с трудом можно найти маркировку модели, и не более.
Поэтому при выборе схемы подключения необходимо узнать из справочника тип и мощность, прозвонить мультиметром проводку относительно корпуса и между выводами на жгуте. Только после того, как будет достоверно установлено, что нет короткого замыкания на корпусе, определены контакты каждой из обмоток, можно приступать к подключению.
Прямой пуск
Данный метод основан на прямом подключении якорной обмотки к электрической сети при номинальном напряжении двигателя. Прямой пуск можно применять только в случае наличия стабильного питания мотора, жестко связанного с приводом.
Этот способ является одним из самых простых. Температура при прямом пуске повышается, по сравнению с прочими способами, незначительно.
Температура при прямом пуске повышается, по сравнению с прочими способами, незначительно.
Схема прямого пуска
Метод прямого пуска наиболее предпочтителен при отсутствии специальных ограничений на ток, поступающий от электросети.
Если электродвигатель работает в режиме частых запусков и отключений, его необходимо снабдить простейшим оборудованием. Его роль может выполнять расцепитель с ручным управлением. Напряжение в этом случае подается на клеммы электромотора.
Прямой пуск можно применять только на маломощных двигателях, поскольку пик нагрузки а крупных моделях может превышать номинальную нагрузку в 50 раз.
Графический метод расчета пусковых реостатов
В основе графического метода лежит пусковая диаграмма двигателя. Пусковая диаграмма, представленная на рис. 13.14, совмещена с трехступенчатым пусковым реостатом; K1, К2 и КЗ являются контактами силовых контакторов, посредством которых осуществляется переключение ступеней реостата, а rдоб1, rдоб2 и rдоб3 — резисторы ступеней пускового реостата.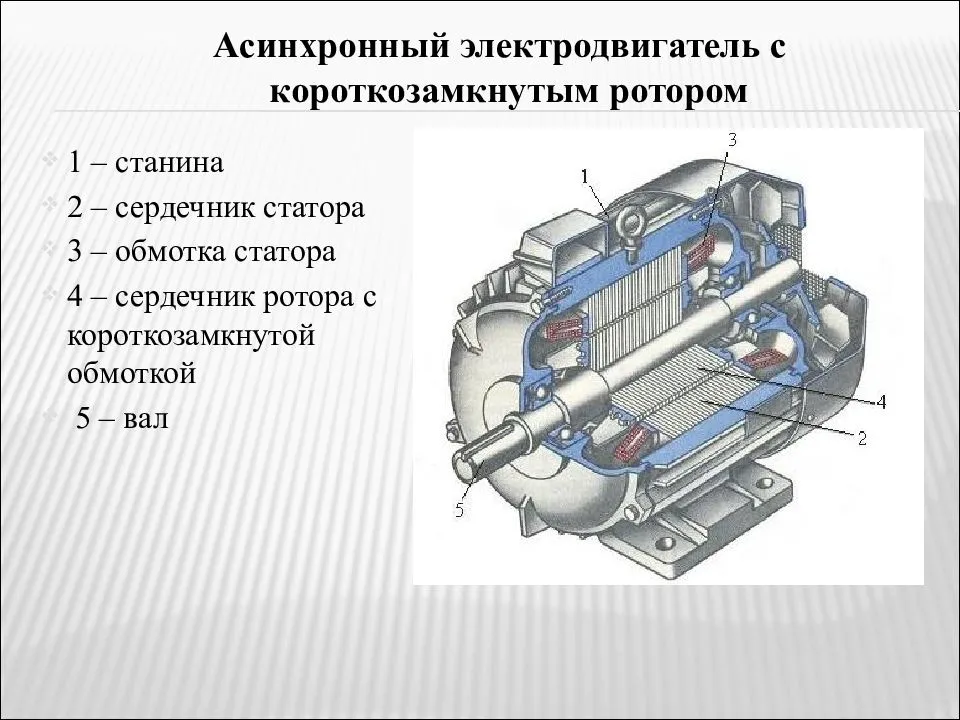 Механические характеристики 1, 2, 3 соответствуют ступеням пускового реостата RПР1, RПР2 и RПР3. Значения начального пускового тока I1 и тока переключений реостатов I2 обычно принимают
Механические характеристики 1, 2, 3 соответствуют ступеням пускового реостата RПР1, RПР2 и RПР3. Значения начального пускового тока I1 и тока переключений реостатов I2 обычно принимают
I1 = (1,5…2,5)Iaном
I2 = (1,0…1,3)Iaном
при этом ток переключений I2 должен быть не меньше тока нагрузки, соответствующего статическому моменту сопротивления нагрузки МС, на вал двигателя. Для двигателей специального назначения, с тяжелыми условиями работы, например двигателей краново-металлургических серий, указанные значения токов могут быть увеличены.
Торможение электрического двигателя постоянного тока
Для торможения электроприводов с ДПТ также есть три варианта: торможение противовключением, динамическое и рекуперативное. Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла.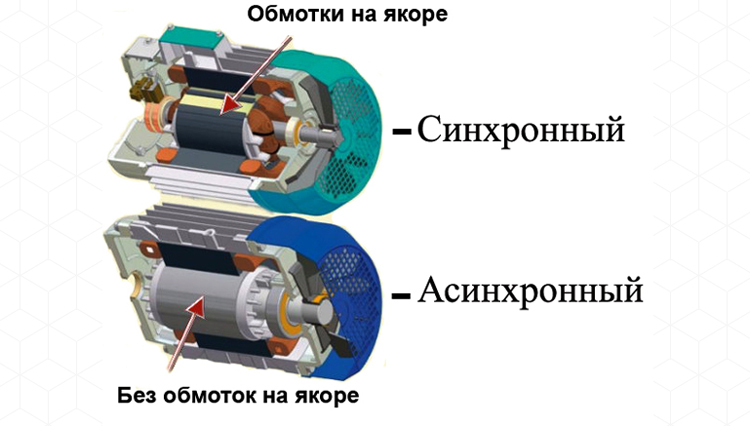 Это торможение сопровождается мгновенной остановкой двигателя.
Это торможение сопровождается мгновенной остановкой двигателя.
Последнее происходит, если электрический мотор, включенный в сеть, вращается со скоростью, которая выше скорости холостого хода. ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т.е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
Кнопочный пост
Данное оборудование предназначается для коммутации, то есть соединения цепей, в которых протекает переменный ток с максимальным напряжением в 660 В и частотой 50 или 60 Гц. Можно эксплуатировать такие устройства и в сетях с постоянным током, но тогда максимальное рабочее напряжение ограничивается 440 В. Возможно применение даже в качестве пульта управления.
Советуем изучить — Эксплуатация комплектных трансформаторных подстанций
Обычный кнопочный пост имеет следующие особенности своей конструкции:
- Каждая из его кнопок лишена фиксации.
- Имеется кнопка «Пуск», которая чаще всего имеет не только зеленый цвет, но и контакты нормально-разведенного типа. Некоторые модели даже обладают подсветкой, которая включается после нажатия. Предназначение — введение в работу какого-либо механизма.
- «Стоп» — это кнопка, обладающая красным цветом (чаще всего). Располагается она на замкнутых контактах, а ее основное предназначение — это отключение какого-либо прибора от источника питания с целью остановки его работы.
- Отличие между некоторыми приборами состоит в материале, который используется для изготовления каркаса. Он может быть сделан из металла или пластмассы. В данном случае корпус играет важную роль, так как имеет определенную степень защиты, зависящую от материала.

Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине.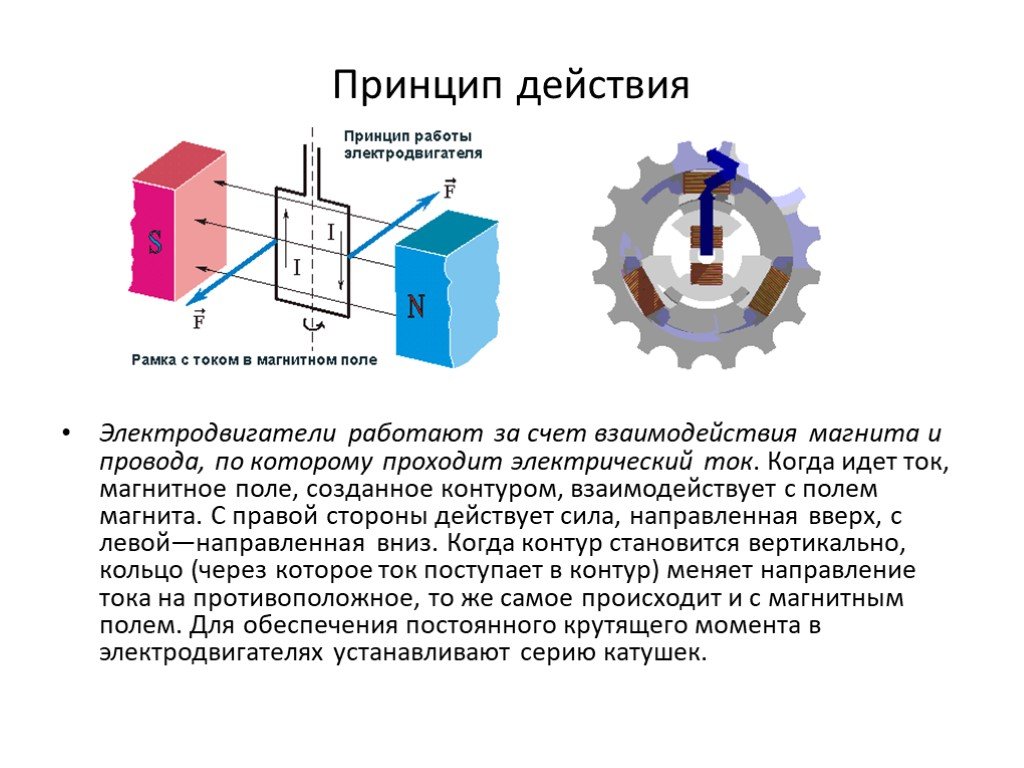 В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Пуск путем плавного повышения питающего напряжения
В обмотках двигателей насосов, конвейеров, воздуходувок в момент запуска возникают повышенные токи, превышающие их номинальное значение в 6 раз. Это явление отрицательно сказывается на составных частях мотора, снижая их долговечность. Поэтому в электрооборудовании мощностью свыше 1 кВт используют плавный пуск.
Смысл данного способа заключается в следующем: питающее напряжение повышается постепенно до тех пор, пока двигатель не выйдет на рабочий режим. Регулировка производится при помощи тиристоров или симисторов. Они располагаются «спина к спине» и устанавливаются на каждой из питающих линий переменного тока.
Устройство плавного пуска
Приводятся в действие тиристоры на начальном этапе, причем их включают последовательно с небольшой задержкой для каждого полупериода. Такая схема работы способствует эффективному наращиванию напряжения (среднего переменного) на электродвигателе вплоть до его выхода на номинальное напряжение электросети.
Такая схема работы способствует эффективному наращиванию напряжения (среднего переменного) на электродвигателе вплоть до его выхода на номинальное напряжение электросети.
Как только мотор достигнет номинальной скорости вращения, его можно переключить напрямую по схеме байпас.
Управление большими двигателями осуществляется посредством установок плавного пуска или частотных преобразователей.
Но эти устройства с успехом заменяют:
- выключателями;
- разъединителями полного напряжения.
Последний подает полное напряжение на клеммы электродвигателя (принцип прямого пуска). Но такая схема возможна только на маломощных электроустановках.
Способ плавного пуска асинхронного двигателя с короткозамкнутым ротором
Существуют и другие мягкие пускатели, обеспечивающие плавную остановку двигателя. Они необходимы в устройствах, которые при резком снижении скорости вращения могут привести к их поломке или нарушениям разного характера. В качестве примера можно привести насос, быстрая остановка которого вызовет возникновение гидроудара в системе.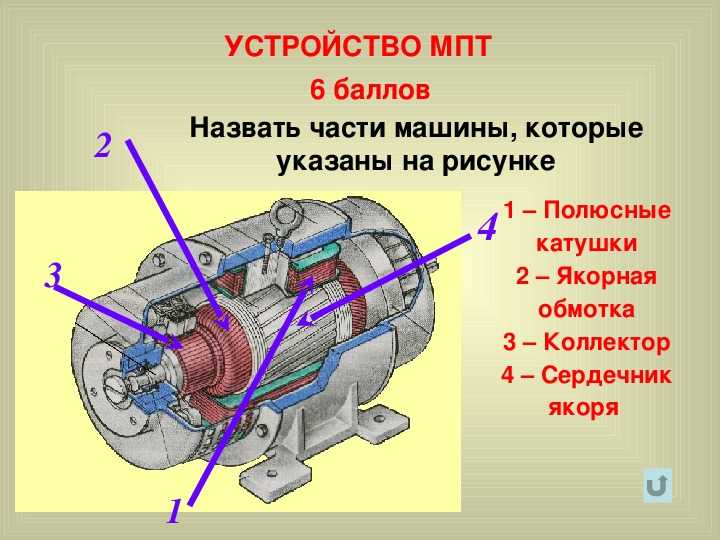 Нежелательна резкая остановка конвейерных лент, в результате которой полотно может выйти из строя.
Нежелательна резкая остановка конвейерных лент, в результате которой полотно может выйти из строя.
Плавный останов осуществляется по такому же принципу, что и плавный пуск — с использованием силовых полупроводников.
Особенности плавного пуска трехфазных двигателей
На электродвигателях данного типа применяется мягкий пуск «звезда-треугольник». Схема работает следующим образом:
- изначально обмотки мотора соединены звездой;
- при выходе двигателя на заданные параметры они переключаются в соединение треугольником.
Система управления трёхфазным двигателем (инвертор)
В схему устройства входят:
- контакторы на каждую фазу;
- таймера, задающего интервал времени;
- реле перегрузки.
Такой способ позволяет держать пусковой ток на уровне 30% от его значения при прямом пуске. Соответственно, и крутящий момент ниже – не более 25%.
Применять метод «звезда-треугольник» можно только при наличии нагрузки на двигателе в момент его пуска.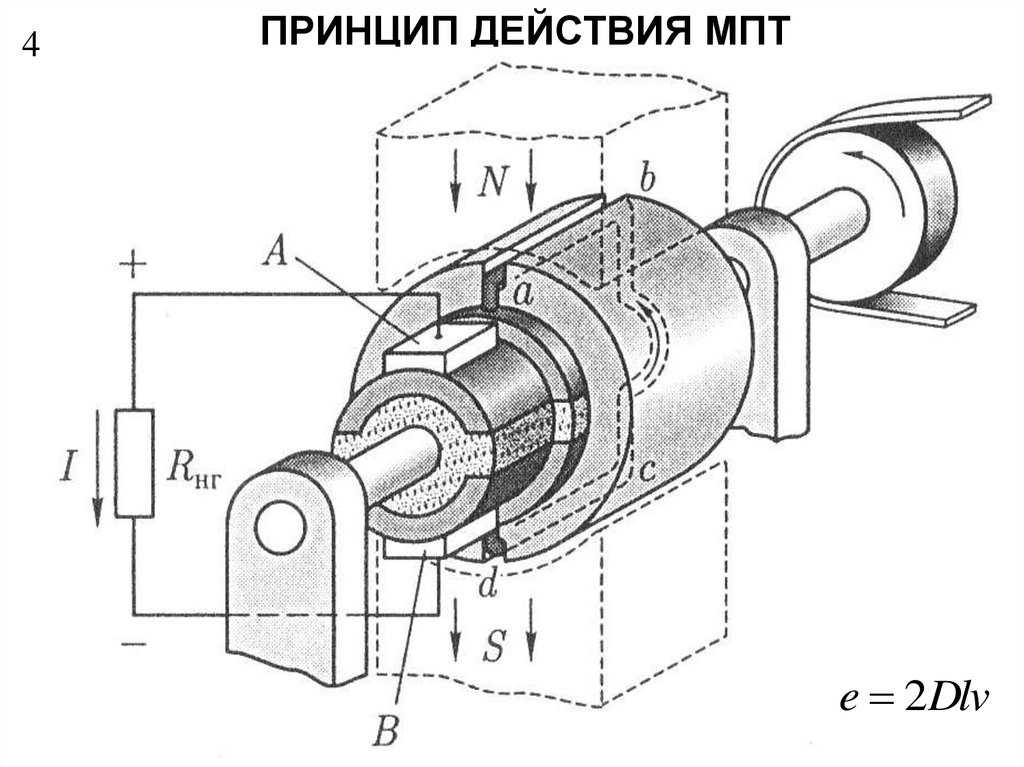
Но чрезмерно нагруженное электрооборудование разогнать до номинальной скорости не удастся из-за недостаточного крутящего момента.
Устройства плавного могут играть роль регулятора напряжения электродвигателя, если в схеме присутствует соответствующий контроллер. Его задача – отслеживать коэффициент мощности мотора. Зависит он от нагрузки: при ее небольшом значении контроллер понизит напряжение и ток электродвигателя.
Как подключить однофазный асинхронный мотор
В любом асинхронном электродвигателе, рассчитанном на питание от однофазной сети 220 В, имеется две обмотки — пусковая и рабочая. В качестве «коллектора» используется цилиндрическая болванка из алюминия, которая насажена на валу. Можно даже отметить, что цилиндр на роторе является, по сути, короткозамкнутой обмоткой. Существует множество схем для включения асинхронного мотора, но применяется на практике немного:
- С использованием балластного сопротивления, подключенного к обмотке пуска.
- С включенным конденсатором на обмотке запуска.
- При помощи кнопочного или релейного пускателя, стартового конденсатора, включенного в цепь обмотки пуска.
Очень часто применяется комбинация кнопочного или релейного пускателя, а также постоянно включенного рабочего конденсатора. Вместо реле очень часто используется электронный ключ на тиристоре. При помощи этого переключателя производится подключение однофазного электродвигателя с дополнительной группой конденсаторов.
Однофазный асинхронный электродвигатель
Если оставить на роторе короткозамкнутый виток, а на статоре одну катушку, то мы получим удивительную конструкцию — асинхронный однофазный двигатель.
На первый взгляд кажется, что такой двигатель работать не должен. Ведь в роторе нет тока, а магнитное поле статора не вращается. Но если ротор рукой толкнуть в любую сторону, двигатель заработает! И вращаться он будет в ту сторону, в которую его подтолкнули при пуске.
Объяснить работу этого двигателя можно, представив неподвижное переменное магнитное поле статора как сумму двух полей, вращающихся навстречу друг другу. Пока ротор неподвижен, эти поля уравновешивают друг друга, поэтому однофазный асинхронный двигатель не может стартовать самостоятельно. Если же ротор внешним усилием привести в движение, он будет вращаться попутно с одним вектором и навстречу другому.
Пока ротор неподвижен, эти поля уравновешивают друг друга, поэтому однофазный асинхронный двигатель не может стартовать самостоятельно. Если же ротор внешним усилием привести в движение, он будет вращаться попутно с одним вектором и навстречу другому.
Можно показать, что из-за разности встречной и попутной скоростей влияние попутного вектора будет сильнее, и двигатель будет работать в асинхронном режиме.
Классификация
Все трехфазные электродвигатели можно разбить на две группы:
Синхронные. Вращаются со скоростью постоянного магнитного поля. Для повышения мощности, ротор изготовляется по принципу трансформатора – имеет обмотки и сердечник. Напряжение подается через угольные щетки на кольца коллектора (контакты), закрепленного на валу, а уж потом – на катушки ротора.
Асинхронные, с короткозамкнутым ротором. Вращательный импульс идет от возбуждения катушек статора. Короткозамкнутые витки выполнены в виде беличьего колеса. Ротор вращается со скоростью ниже, чем электромагнитное поле статора. Отсюда и его название.
Отсюда и его название.
Плюсы – минусы
Любому электрооборудованию присущи свои особенности, которые нужно учитывать в процессе эксплуатации, чтобы оно прослужило дольше.
Двигатели постоянного тока имеют свои неоспоримые достоинства:
- Ротор электродвигателя — особенности конструкции и принцип работы устройства. Инструкция по ремонту и восстановлению
Подключение электродвигателя — основные схемы, способы и особенности подсоединения различных моделей (инструкция + фото)
Однофазный электродвигатель: основные виды, принцип работы и инструкция по подключению и настройке. Обзор лучших производителей!
- Имеют небольшие габариты;
- Отсутствуют сложности управления;
- Простое строение и конструктивные особенности, поддающиеся ремонту и техническому обслуживанию;
- Можно использовать для генерирования тока;
- Быстро запускаются;
- Плавная регулировка оборотов вала (ускорение и замедление с помощью реостата).

Наряду с существенными достоинствами, имеется ряд недостатков:
- Нужен специальный питающий блок, выравнивающий переменное напряжение;
- Высокая ценовая стоимость;
- Периодическая перезарядка аккумуляторов. Когда они сели, запуск двигателя невозможен;
- Рабочая зона ограничена радиусом взаимодействия с источником питания (троллейбус, трамвай), и когда он отсутствует либо поврежден, работа механизмов устройства невозможна;
- Требует периодического техобслуживания (замены быстроизнашивающихся колец коллектора и графитно-медных щеток).
Схема подключения двигателя постоянного тока 220 вольт
Моторы, работающие на постоянном токе редко встречаются в домашнем хозяйстве. Но они всегда стоят во всех детских игрушках, работающих от батареек, которые ходят, бегают, ездят, летают и т. п. Двигатели постоянного тока (ДПТ) устанавливаются в автомобилях: в вентиляторах и различных приводах. Они почти всегда используются на электротранспорте и реже в производстве.
Преимущества ДПТ по сравнению с асинхронными моторами:
- Хорошо поддаются регулировке.
- Отличные пусковые свойства.
- Частоты вращения могут быть более 3000 об/мин.
Недостатки ДПТ:
- Низкая надежность.
- Сложность изготовления.
- Высокая стоимость.
- Большие затраты на обслуживание и ремонт.
Далее Я постараюсь кратко и доступно в одной статье изложить схемы, принципы работы, регулировки и реверса двигателей постоянного тока.
Содержание
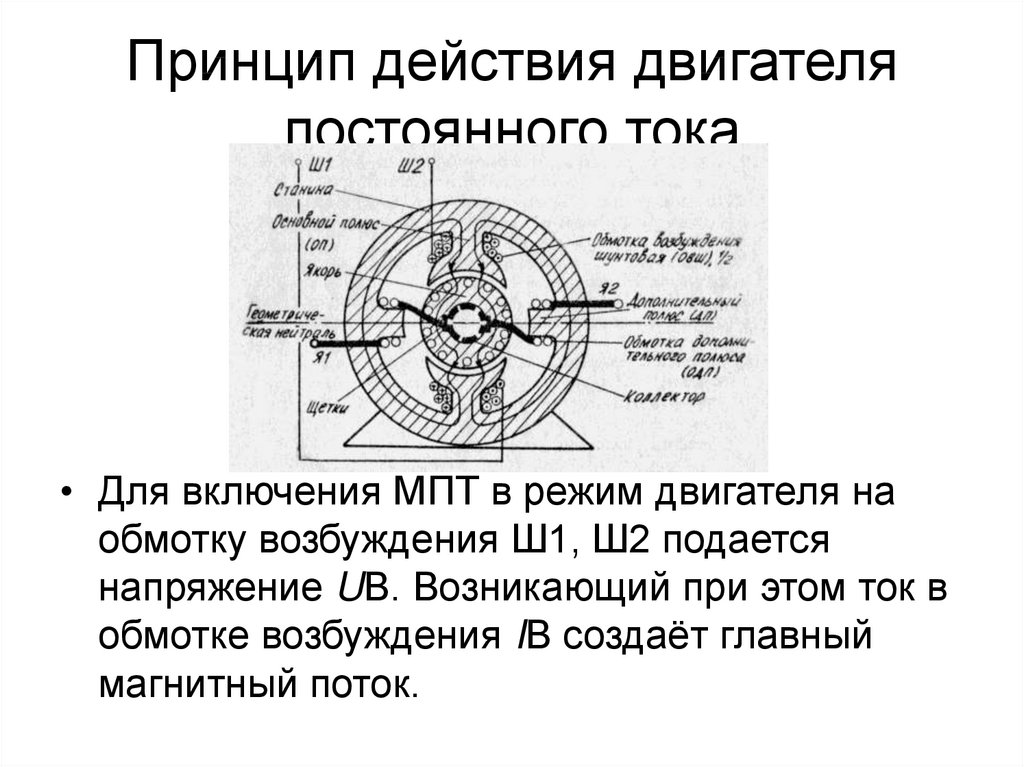
- Принцип действия электродвигателя постоянного тока
- Принципиальные схемы электродвигателя постоянного тока
- Реверсирование двигателей постоянного тока
- Регулирование оборотов двигателей постоянного тока
- Электродвигатели постоянного тока
- Торможение электрического двигателя постоянного тока
- Преимущества двигателей постоянного тока
- Принцип действия ДПТ
- Принципиальные схемы ДПТ
- Схема для подключения двигателя с возбуждением параллельным
- Электродвигатель постоянного тока с параллельным возбуждением
- Бесщеточные моторы
- Где купить электродвигатель
- Как подключить двигатель постоянного тока?
- Как работает электрический двигатель?
- Различные схемы подключения обмоток
- 32. Основные схемы включения дпт. Независимое возбуждение
- Параллельное возбуждение
- Последовательное возбуждение
- Смешанное возбуждение
- 33. Характеристика дпт с независимым возбуждением.
- Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
- Электродвигатели постоянного тока. Устройство и работа. Виды
- Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
- Электродвигатели постоянного тока разделяют по характеру возбуждения.
- Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Возбуждение двигателя постоянного тока
- Двигатель с независимым возбуждением
- ДПТ с параллельным возбуждением
- ДПТ с последовательным возбуждением
- ДПТ со смешанным возбуждением
- Схема включения двигателя постоянного тока в сеть 110 и 220вольт
- Порядок и схема включения двигателя постоянного тока
- Пуск двигателей постоянного тока
- Прямой пуск
- Пуск с помощью пускового реостата или пусковых сопротивлений
- Пуск при пониженном напряжении цепи якоря
- Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ) — Help for engineer
- Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ)
- Тормозные режимы
 Основные схемы включения дпт. Независимое возбуждение
Основные схемы включения дпт. Независимое возбуждениеПринцип действия электродвигателя постоянного тока
Устройство двигателя аналогично синхронным двигателям переменного тока. Повторяться не буду, если не знаете, тогда смотрите в этой нашей статье.
Повторяться не буду, если не знаете, тогда смотрите в этой нашей статье.
Любой современный электромотор работает на основе закона магнитной индукции Фарадея и «Правила левой руки». Если к нижней части обмотки якоря подключить электрический ток в одном направлении, а к верхней- в обратном- он начнет вращаться. Согласно правилу левой руки, проводники, уложенные в пазах якоря, будут выталкиваться магнитным полем обмоток корпуса ДПТ или статора.
Нижняя часть будет выталкиваться вправо, а верхняя – влево, поэтому якорь начнет вращаться до момента пока части якоря не поменяются местами. Для создания непрерывного вращения необходимо постоянно менять местами полярность обмотки якоря. Чем и занимается коллектор, который при вращении коммутирует обмотки якоря. Напряжение от источника тока подается на коллектор при помощи пары прижимных графитовых щеток.
Принципиальные схемы электродвигателя постоянного тока
Если двигатели переменного тока довольно просто подключаются, то с ДПТ все сложнее. Вам необходимо знать марку мотора, и затем в интернете узнавайте про его схему включения.
Вам необходимо знать марку мотора, и затем в интернете узнавайте про его схему включения.
Чаще всего у средних и мощных моторов постоянного тока есть в клеммной коробке отдельные выводы от якоря и от обмотки возбуждения (ОВ). Как правило, на якорь подаётся полное напряжение электропитания, а на обмотку возбуждения -регулируемый ток реостатом или переменным напряжением. От величины тока ОВ и будут зависеть обороты ДПТ. Чем он выше, тем быстрее скорость вращения.
В зависимости от того как подключен якорь и ОВ, электродвигатели бывают с независимым возбуждением от отдельного источника тока и с самовозбуждением, которое может быть параллельным, последовательным и смешанным.
На производстве применяются двигатели с независимым возбуждением ОВ, которая подключается к отдельному от якоря источнику питания. Между обмотками возбуждения и якоря нет электрической связи.
Схема подключения с параллельным возбуждением по своей сущности аналогична схеме с независимым возбуждением ОВ. С той лишь разницей, что отпадает необходимость в использовании отдельного источника питания. Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
С той лишь разницей, что отпадает необходимость в использовании отдельного источника питания. Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
Моторы с последовательным возбуждением применяются, когда необходим большой пусковой ток, мягкая характеристика. Они применяются а трамваях, троллейбусах и электровозах. По этой схеме обмотки возбуждения и якоря подключаются между собой последовательно. При подаче напряжения токи в обоих обмотках будут одинаковы. Главный недостаток заключается в том, что при уменьшении нагрузки на вал меньше 25% от номинала, происходит резкое увеличение частоты вращения, достигающее опасных для ДПТ значений. Поэтому для безотказной работы необходима постоянная нагрузка на вал.
Иногда применяются ДПТ со смешанным возбуждением, при котором одна обмотка ОВ соединяется последовательно якорной цепи, а другая параллельно. В жизни редко встречается.
В жизни редко встречается.
Реверсирование двигателей постоянного тока
Что бы изменить направление вращение ДПТ с последовательным возбуждением необходимо поменять направления тока в ОВ или обмотке якоря. Практически, это делается изменением полярности: меняем плюс с минусом местами. Если же поменять одновременно полярность в цепях возбуждения и якоря, тогда направление вращения не изменится. Аналогично делается реверс и для моторов, работающих на переменном токе.
Реверсирование ДПТ с параллельным или смешанным возбуждением лучше производить изменением направления электрического тока в обмотке якоря. При разрыве обмотки возбуждения, ЭДС достигает опасных величин и возможен пробой изоляции проводов.
Регулирование оборотов двигателей постоянного тока
ДПТ с последовательным возбуждением проще всего регулировать переменным сопротивлением в цепи якоря. Регулировать можно только на уменьшение числа оборотов в соотношении 2:1 или 3:1. При этом происходят большие потери в регулировочном реостате (R рег). Данный метод используется в кранах и электрических тележках, у которых бывают частые перерывы в работе. В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.
При этом происходят большие потери в регулировочном реостате (R рег). Данный метод используется в кранах и электрических тележках, у которых бывают частые перерывы в работе. В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.
ДПТ с параллельным возбуждением так же можно регулировать частоту оборотов вниз при помощи сопротивления в цепи якоря, но не более 50 процентов от номинала. Опять же будет нагрев сопротивления из-за потерь электрической энергии в нем.
Увеличить же обороты максимум в 4 раза позволяет реостат в цепи ОВ. Самый простой и распространенный метод регулировки частоты вращения.
На практике в современных электромоторах данные методы регулировки из-за своих недостатков и ограниченности диапазона регулирования редко применяются. Используются различные электронные схемы управления.
В домашнем хозяйстве редко встретишь мотор, работающий на постоянном токе. Зато они всегда устанавливаются в детских игрушках, которые летают, ездят, шагают и т.д. Всегда они стоят в автомобилях: в различных приводах и вентиляторах. В электротранспорте чаще всего используют тоже их.
Зато они всегда устанавливаются в детских игрушках, которые летают, ездят, шагают и т.д. Всегда они стоят в автомобилях: в различных приводах и вентиляторах. В электротранспорте чаще всего используют тоже их.
Другими словами, применяются двигатели постоянного тока там, где требуется достаточно широкий диапазон регулирования скорости и точность ее поддержания.
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему. Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
Частота вращения – одна из важнейших его характеристик. Ее регулировать можно тремя способами: изменяя поток возбуждения, изменяя величину подводимого напряжения к двигателю, изменяя сопротивление в якорной цепи.
Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.
Торможение электрического двигателя постоянного тока
Для торможения электроприводов с ДПТ также есть три варианта: торможение противовключением, динамическое и рекуперативное. Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла. Это торможение сопровождается мгновенной остановкой двигателя.
Последнее происходит, если электрический мотор, включенный в сеть, вращается со скоростью, которая выше скорости холостого хода. ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т.е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
Преимущества двигателей постоянного тока
Сравнивая их с асинхронными моторами, нужно отметить отличные пусковые качества, высокую (до 3000 об/мин) частоту вращения, а также хорошую регулировку. Из недостатков отметить можно? Сложность конструкции, низкую надежность, высокую стоимость и затраты на ремонт и обслуживание.
Принцип действия ДПТ
ДПТ, как и любой современный мотор, работает на основе «Правила левой руки», с которым все знакомы еще со школы и закона Фарадея. При подключении тока к нижней обмотке якоря в одном направлении, а к обмотке верхней – в другом, якорь начинает вращаться, а уложенные в его пазах проводники – выталкиваться магнитным полем статора или обмоток корпуса двигателя постоянного тока. Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.
Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.
Принципиальные схемы ДПТ
Двигатель переменного тока подключается просто, в отличие от ДПТ. Обычно у таких двигателей высокой и средней мощности имеются отдельные выводы в клеммной коробке (от обмотки и якоря). На якорь обычно подается полное напряжение, а на обмотку — ток, регулировать который можно реостатом или напряжением переменным. От величины тока, имеющегося на обмотке возбуждения, прямопропорционально зависят обороты двигателя переменного тока.
В зависимости от того, какая используется схема подключения электродвигателя постоянного тока, двигатель электрический может быть постоянного тока, разделяют на самовозбуждающиеся и с независимым возбуждением (от отдельного источника).
Схема для подключения двигателя с возбуждением параллельным
Она аналогична предыдущей, но не имеет отдельного источника питания.
Когда требуется большой пусковой ток, применяют двигатели с возбуждением последовательным: в городском электротранспорте (троллейбусах, трамваях, электровозах).
Токи обоих обмоток в этом случае одинаковы. Недостаток – требуется постоянная нагрузка на вал, поскольку при ее уменьшении на 25%, резко увеличивается частота вращения и происходит отказ двигателя.
Есть еще моторы, которые крайне редко используются — со смешанным возбуждением. Их схема представлена ниже.
Электродвигатель постоянного тока с параллельным возбуждением
Под понятием «возбуждение» понимают создание в электрических машинах магнитного поля, которое необходимо, чтобы заработал двигатель. Схем возбуждения несколько:
- С независимым возбуждением (питание обмотки происходит от постороннего источника).
- Электродвигатель постоянного тока с параллельным возбуждением (источник питания обмотки возбуждения и якоря включены параллельно) – шунтовые.
- С последовательным возбуждением (обе обмотки включены последовательно) – сериесные.
- Со смешанным возбуждением – компаундные.

Бесщеточные моторы
Но, двигатель со щетками, которые быстро изнашиваются и приводят к искрению, не может использоваться там, где необходима высокая надежность, поэтому среди электротранспорта (электровелосипедов, скутеров, мотоциклов и электромобилей) наибольшее применение нашли бесщеточные электродвигатели. Они отличаются высоким КПД, невысокой стоимостью, хорошей удельной емкостью, длительным сроком службы, малыми размерами, бесшумной работой.
Работа этого двигателя основывается на взаимодействии магнитных полей электромагнита и постоянного. Когда за окном 21 век, а вокруг полно мощных и недорогих проводников, логично заменить механический инвертор цифровым, добавить датчик положения ротора, решающий в какой момент на конкретную катушку необходимо подать напряжение, и получить бесщеточный электродвигатель постоянного тока. В качестве датчика чаще используется датчик Холла.
В качестве датчика чаще используется датчик Холла.
Поскольку в этом двигателе удалены щетки, он не нуждается в регулярном обслуживании. Управляется двигатель постоянного тока при помощи блока управления, позволяющего изменять частоту вращения вала мотора, стабилизировать на определенном уровне обороты (независимо от имеющейся на валу нагрузки).
Состоит блок управления из нескольких узлов:
- Системы импульсно-фазового управления СИФУ.
- Регулятора
- Защиты.
Где купить электродвигатель
Многие компании с мировыми именами выпускают сегодня электродвигатель постоянного тока 220 В. Купить его можно в интернет — магазинах, менеджеры которых предоставят исчерпывающую онлайн информацию, касающуюся выбранной модели. Большой выбор моделей таких двигателей на сайте в каталоге которого можно ознакомиться со стоимостью моделей, их описанием и пр. Если даже в каталоге нет интересующего двигателя, можно заказать его доставку.
Как подключить двигатель постоянного тока?
Двигатели постоянного тока используется в промышленности лишь в том случае, когда требуется регулировать скорость вращения очень точно. В данной публикации подробно рассмотрим методы подключения, а также принцип работы двигателя постоянного тока.
В данной публикации подробно рассмотрим методы подключения, а также принцип работы двигателя постоянного тока.
Стоит отметить, что данная статья является ознакомительной. Она предоставляет лишь поверхностную информацию в отношении подключения электрического двигателя.
Как работает электрический двигатель?
Ниже будут представлены два элемента, без которых электрический двигатель существовать не может:
- статор;
- ротор.
Статор – неподвижная часть электрического двигателя. В нем располагаются пазы, куда и укладывается электрическая обмотка. В зависимости от количества витков изменяются технические характеристики двигателя.
Ротор – это подвижная часть электрического двигателя. Стоит отметить огромную важность воздушного зазора между статором и ротором. И речь идет не только о том, чтобы ротор вращался свободно.
Именно в воздушном зазоре возникает магнитный поток, который начинает вращать ротор.
Различные схемы подключения обмоток
Существует несколько различных систем подключения: с независимым возбуждением, с последовательным возбуждением, с параллельным возбуждением, смешанная.
В зависимости от этих типов подключения будут зависеть пусковые характеристики двигателя постоянного тока.
В завершение следует несколько слов сказать и о сфере применения двигателей постоянного тока. Дело в том, что ДТП является наиболее популярным электрическим двигателем. Он широко используется не только в промышленности, но и в быту.
Вряд ли стоит объяснять, что любой двигатель может быть превращен в генератор. Генераторы постоянного тока используется в автомобилях. Кроме того, практически все малогабаритные двигатели, которые используются в быту от аккумулятора, представляют собой не что иное, как двигатель постоянного тока.
Как уже было сказано выше, широкое распространение двигатель постоянного тока получил за счет того, что имеется простая возможность регулировки скорости его вращения. Осуществляется это при помощи изменения сопротивления якоря.
Канал «Советы электрика» расскажет о принципах функционирования двигателя постоянного тока:
32. Основные схемы включения дпт.
 Независимое возбуждение
Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.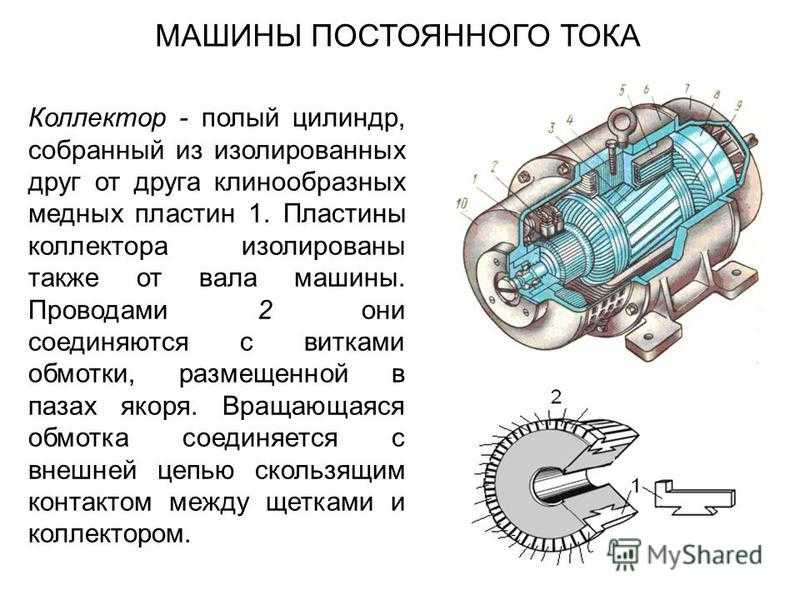
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
Схема параллельного возбуждения
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Схема последовательного возбуждения
Смешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
33. Характеристика дпт с независимым возбуждением.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.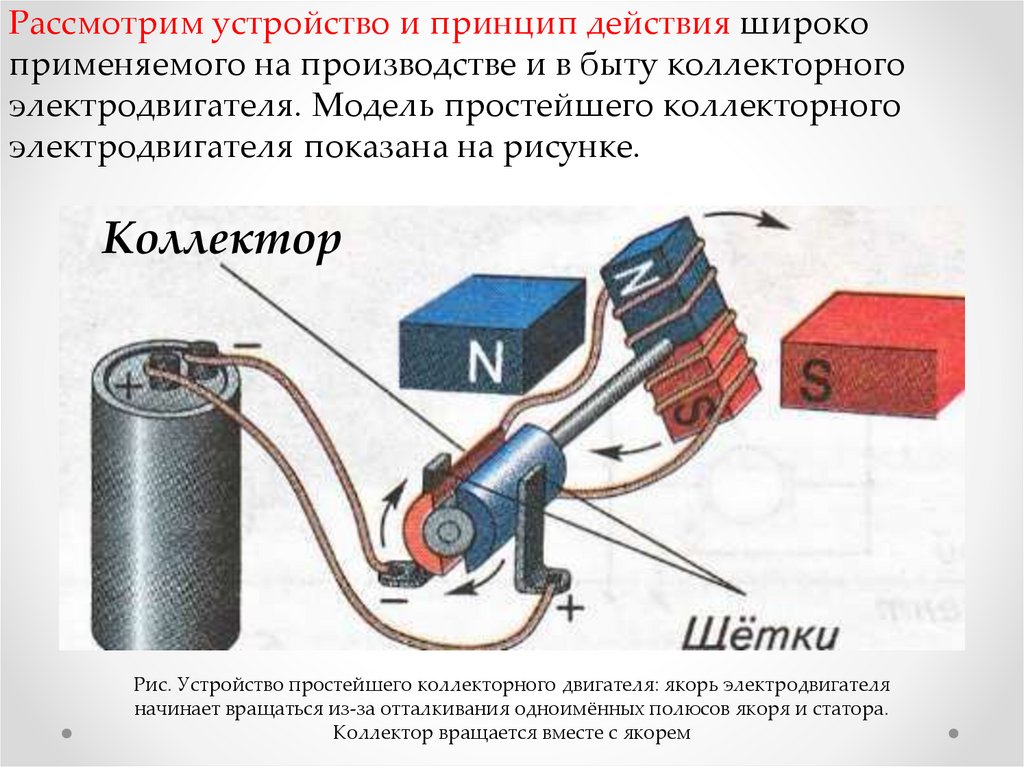
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным . В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.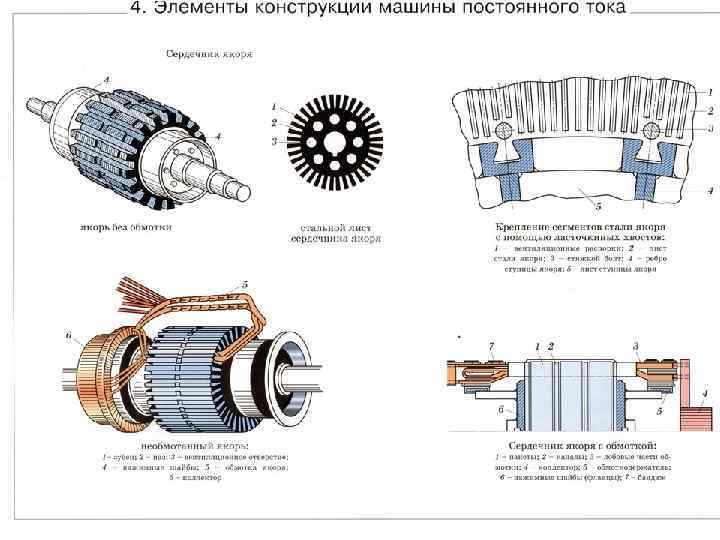
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.

Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Электродвигатели постоянного тока разделяют по характеру возбуждения.
Независимое возбуждение
При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждение
Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждение
В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатации
Электродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые модели электродвигателей обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока
- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
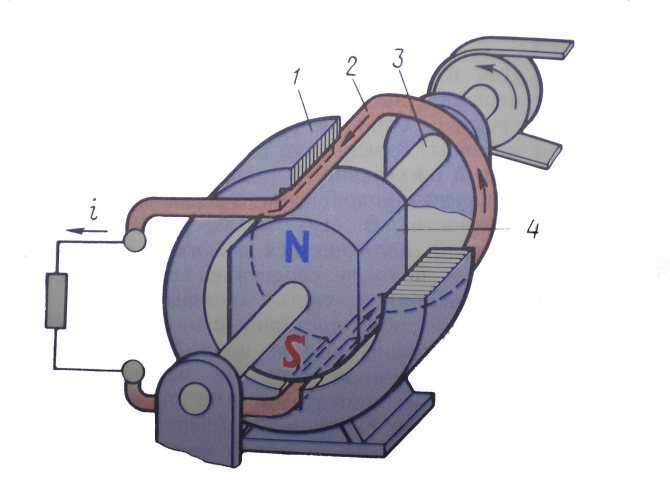
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.
- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.
Сфера использования
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Возбуждение двигателя постоянного тока
Наличие обмотки возбуждения (ОВ) у двигателя постоянного тока позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
Двигатель с независимым возбуждением
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.
ДПТ с параллельным возбуждением
По сути, схема подключения ОВ с параллельным возбуждением(рис.2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.
Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.
ДПТ с последовательным возбуждением
При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”.
ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Схема включения двигателя постоянного тока в сеть 110 и 220вольт
Часто в условиях домашней мастерской, оснащенной различным оборудованием и механизмами, возникает необходимость подключения к сети двигателя постоянного тока.
Самой востребованной и популярной выступает схема с использованием пускового реостата. Этот элемент отвечает за понижение показателей пускового тока, возникающего при включении двигателя. Пусковой ток нуждается в корректировке, так как превышает номинальный показатель в 10-20р. Двигатель постоянного тока, а точнее обмотка может не справиться с такой нагрузкой.
На схеме ниже представлено подключение пускового реостата по последовательной схеме с цепью якоря.
- Л – соединенный с сетью зажим;
- М – соединенный с цепью возбуждения зажим-фиксатор;
- Я – соединенный с якорем зажим;
- 1 – дуга, 2 – рычаг, 3 – контакт рабочий.
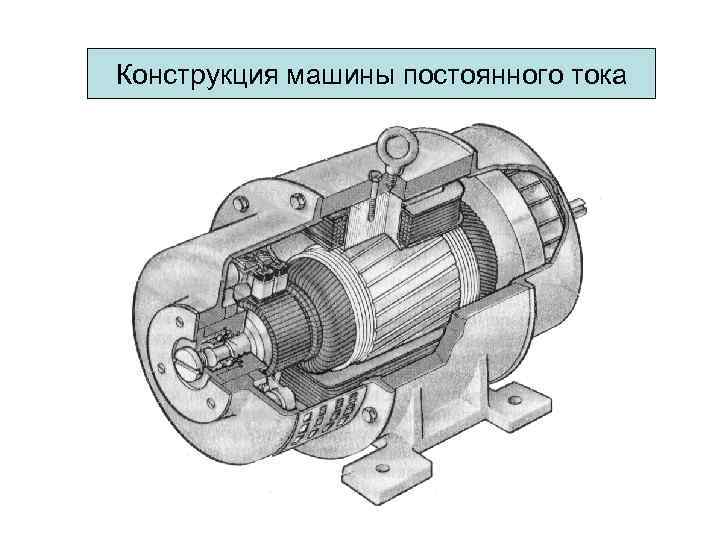
Включение и управление двигателем постоянного тока важно выполнять, принимая во внимание информацию, приведенную на самом агрегате или в инструкции (если таковая еще сохранилась).
Представленная схема двигателя постоянного тока оптимальна для агрегатов, мощность которых превышает 0,5кВт. Чтобы рассчитать пусковое сопротивление реостата, воспользуйтесь формулой:
Расшифровка обозначений: Rn – пусковое сопротивление реостата, U – напряжение сети (100 или 220), Iном – номинальное значение тока электрического двигателя, Rя – показатели сопротивления обмотки якоря.
Порядок и схема включения двигателя постоянного тока
- Установите рычаг на реостате в положение «0» — холостой контакт;
- После включения сетевого рубильника необходимо перевести этот рычаг в положение первого промежуточного контакта. Подключаемый двигатель постоянного тока перейдет в стадию возбуждения. По якорной цепи потечет ток, показатель которого зависит от величины сопротивления, включающего все 4 секции пускового реостата;
- Посредством увеличения частоты вращения якоря пусковой ток снижается. В результате уменьшается и сопротивление, возникшее при пуске. Для выполнения задачи рычаг реостата постепенно проводят по контактам до тех пор, пока он не займет рабочего контакта. НЕ задерживайтесь на промежуточных контактах, на такие нагрузки пусковые реостаты не рассчитаны.
 В результате уменьшается и сопротивление, возникшее при пуске. Для выполнения задачи рычаг реостата постепенно проводят по контактам до тех пор, пока он не займет рабочего контакта. НЕ задерживайтесь на промежуточных контактах, на такие нагрузки пусковые реостаты не рассчитаны.
В результате уменьшается и сопротивление, возникшее при пуске. Для выполнения задачи рычаг реостата постепенно проводят по контактам до тех пор, пока он не займет рабочего контакта. НЕ задерживайтесь на промежуточных контактах, на такие нагрузки пусковые реостаты не рассчитаны.Схема двигателя постоянного тока предполагает и определенную последовательность действий для его отключения.
Двигатель постоянного тока отключается не сразу. После перевода рукояти реостата в крайнее левое положение агрегат отключится, но обмотка останется замкнутой. Только после этого питание двигателя можно выключать.
Если игнорировать приведенный выше порядок действий, при размыкании цепи велик риск возникновения напряжения такой силы, которая выведет электрический двигатель из строя.
Включение двигателя постоянного тока для промышленных применений может отличаться.
Пуск двигателей постоянного тока
При пуске двигателя в ход необходимо: 1) обеспечить надлежащий пусковой момент и условия для достижения необходимой скорости вращения; 2) предотвратить возникновение чрезмерного пускового тока, опасного для двигателя. Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря подключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря.
Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря подключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря.
Прямой пуск
При n = 0 также Eа = 0 и, согласно выражению (5), в статье «Общие сведения о двигателях постоянного тока»
В нормальных машинах Rа = 0,02 – 0,1, и поэтому при прямом пуске с U = Uн ток якоря недопустимо велик:
Вследствие этого прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых Rа относительно велико и поэтому при пуске Iа ≤ (4 – 6) Iн, а процесс пуска длится не более 1 – 2 с.
Пуск с помощью пускового реостата или пусковых сопротивлений
Рисунок 1. Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б)
Для двигателей с параллельным возбуждением самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений (рисунок 1). При этом вместо выражения (5), в статье «Общие сведения о двигателях постоянного тока» имеем
При этом вместо выражения (5), в статье «Общие сведения о двигателях постоянного тока» имеем
а в начальный момент пуска, при n = 0,
где Rп – сопротивление пускового реостата, или пусковое сопротивление. Значение Rп подбирается так, чтобы в начальный момент пуска было Iа = (1,4 – 1,7) Iн .
Рассмотрим подробнее пуск двигателя параллельного возбуждения с помощью реостата (рисунок 1, а).
Перед пуском (t < 0) подвижный контакт П пускового реостата стоит на холостом контакте 0 и цепь двигателя разомкнута. В начальный момент пуска (t = 0) подвижный контакт П с помощью рукоятки переводится на контакт 1, и через якорь пойдет ток Iа, определяемый равенством (3). Цепь обмотки возбуждения ОВ подключается к неподвижной контактной дуге д, по которой скользит контакт П, чтобы во время пуска цепь возбуждения все время была под полным напряжением. Это необходимо для того, чтобы iв и Фδ при пуске были максимальными и постоянными, так как при этом, согласно выражению (8), в статье «Общие сведения о двигателях постоянного тока», при данных значениях Iа развивается наибольший момент М. С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rп.в = 0.
С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rп.в = 0.
При положении контакта П пускового реостата на контакте 1 (t = 0) возникают токи Iа и iв, а так же момент М, и если М больше Мст, то двигатель придет во вращение и скорость n будет расти со значения n = 0 (рисунок 2). При этом в якоре будет индуктироваться электродвижущая сила (э. д. с.) Eа ∼ n и, согласно выражениям (2) и (8), представленных в статье «Общие сведения о двигателях постоянного тока», Iа и M, а также скорость нарастания n будут уменьшаться. Изменение этих величин при Mст = const происходит по экспоненциальному закону.
| Рисунок 2. Зависимость Iа, M и n от времени при пуске двигателя |
Когда Iа достигнет значения Iа мин = (1,1 – 1,3) Iн, контакт П пускового реостата переведется на контакт 2. Вследствие уменьшения Rп ток Iа ввиду малой индуктивности цепи якоря почти мгновенно возрастет, M также увеличится, n будет расти быстрее и в результате увеличения Eа значения Iа и M снова будут уменьшаться (рисунок 2).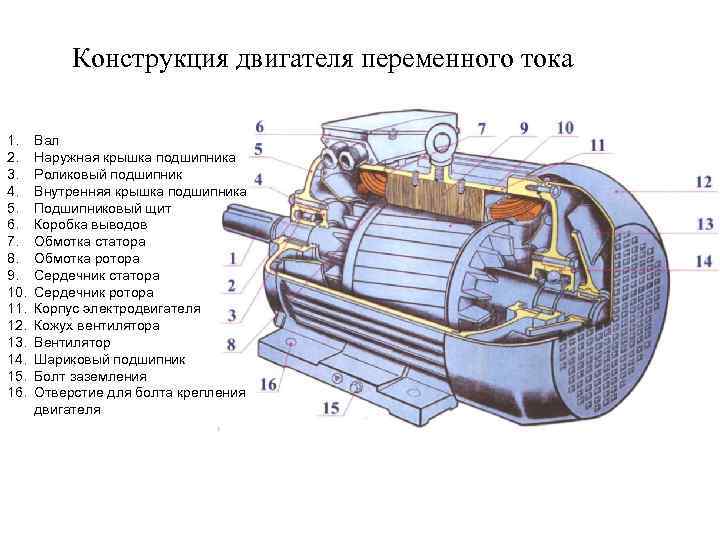 Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигнет установившегося режима работы со значениями Iа и n, определяемыми условием M = Mст .
Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигнет установившегося режима работы со значениями Iа и n, определяемыми условием M = Mст .
При пуске на холостом ходу Mст = M0. Ток Iа = Iа0 в этом случае мал и составляет обычно 3 – 8 % от Iн.
Заштрихованные на рисунке 2 ординаты представляют собой, согласно выражению (2), представленного в статье «Общие сведения о двигателях постоянного тока», значения избыточного, или динамического, момента
под воздействием которого происходит увеличение n.
Число ступеней пускового реостата и значения их сопротивлений рассчитываются таким образом, чтобы при надлежащих интервалах времени переключение ступеней максимальные и минимальные значения Iа на всех ступенях получилось одинаковыми.
По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током.
Остановка двигателя производится путем его отключения от сети с помощью рубильника или другого выключателя. Схема рисунка 1 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Схема рисунка 1 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Применяются также несколько видоизмененные по сравнению с рисунком 1, а схемы пусковых реостатов, без контактной дуги д. Конец цепи возбуждения при этом можно присоединить, например, к контакту 2, и при работе двигателя последовательно с обмоткой возбуждения будут включены последние ступени реостата. Поскольку их сопротивление по сравнению с Rв = rв + Rр.в мало, то это не оказывает большого влияния на работу двигателя.
Автоматизировать переключение пускового реостата неудобно. Поэтому в автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рисунок 1, б), которые поочередно шунтируются контактами К1, К2, К3 автоматически работающих контакторов. Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1 – 2 ступени).
Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1 – 2 ступени).
Ни в коем случае нельзя допускать разрыва цепи параллельного возбуждения.
В этом случае поток возбуждения исчезает ни сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако этот поток будет быстро уменьшаться и скорость n, согласно выражению (7), представленного в статье «Общие сведения о двигателях постоянного тока», будет сильно увеличиваться («разнос» двигателя). При этом ток якоря значительно возрастет и возникнет круговой огонь, вследствие чего возможно повреждение машины, и поэтому, в частности, в цепях возбуждения не ставят предохранителей и выключателей.
Пуск при пониженном напряжении цепи якоря
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения (рисунок 1), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ) — Help for engineer
Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ)
Двигатель постоянного тока последовательного возбуждения представляет собой электрическую машину постоянного тока, в которой обмотка возбуждения подключена последовательно с обмоткой якоря.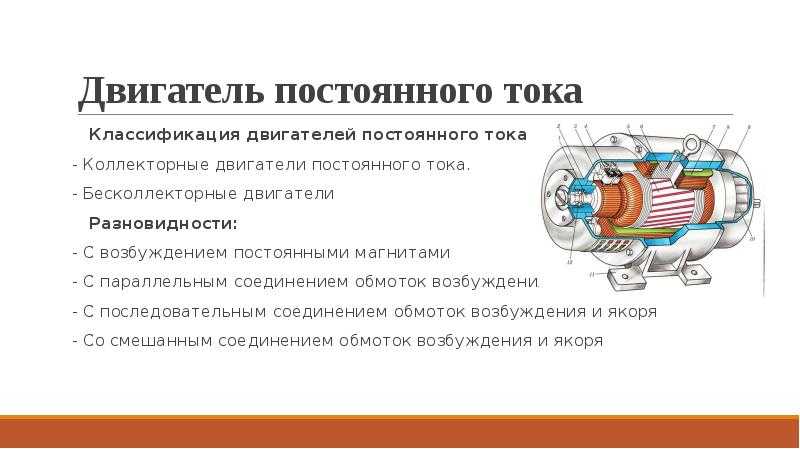 Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен току в обмотке возбуждения I=Iв=Iя, что является его главной отличительной особенностью от остальных типов двигателей.
Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен току в обмотке возбуждения I=Iв=Iя, что является его главной отличительной особенностью от остальных типов двигателей.
Рисунок 1 – Схема подключения ДПТ ПВ
Стоит обратить внимание на зависимость магнитного потока от нагрузки Ф=f(Iя). Если двигатель будет работать на 25% своей номинальной мощности или меньше, то магнитный поток будет крайне мал, что приведет к постоянному увеличению скорости вала. Препятствовать разгону будут лишь механические потери, и двигатель пойдет в «разнос». Это приведет к быстрому выходу машины из строя. Все описанное в соответствии с формулой:
Исходя из вышесказанного, ДПТ ПВ нельзя использовать на холостом ходу, постоянно требуется контроль тока якоря. С этой целью последовательно с обмоткой возбуждения устанавливают минимальное токовое реле, которое замыкает якорную цепь только в том случае, если нагрузка на валу достаточна для поддержания номинальной работы двигателя.
Пуск двигателя производят с пусковым сопротивлением, также включенным последовательно в цепь якоря. После пуска это сопротивление выводят, и машина продолжает работать в номинальном режиме на своей естественной характеристике.
Механическая и электромеханическая характеристики ДПТ ПВ одинаковы и имеют гиперболический вид (рисунок 2).
Рисунок 2 – Механическая и электромеханическая характеристики ДПТ ПВ
Скорость вращения ротора двигателя постоянного тока с последовательным возбуждением производится регулированием двух параметров:
| — питающее напряжение; |
| — магнитный поток полюсов двигателя. |
Для изменения скорости при помощи входного напряжения, в роторную цепь вводят специальное добавочное сопротивление, или же можно использовать пусковой реостат и для этой цели. Но следует заметить, данный способ является крайне неэкономичным и нецелесообразным, так как большое количество энергии будет рассеиваться на реостате.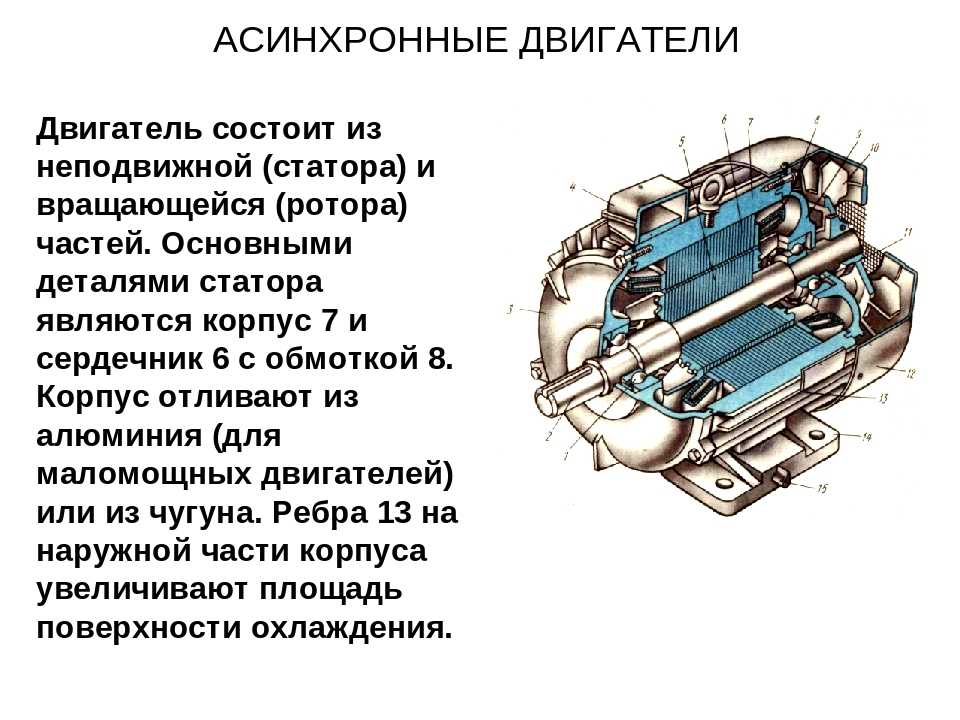
Регулировка скорости изменением магнитного потока, осуществляется включением реостата параллельно обмотке возбуждения. Изменяя сопротивление – меняем ток, протекающий через обмотку возбуждения. Иногда обмотку возбуждения разбивают на несколько параллельных секций. В некоторых типах двигателей предусмотрена возможность отключения витков обмотки, так добиваются того же эффекта регулирования.
Тормозные режимы
В данном двигателе отсутствует режим генераторного торможения с отдачей энергии в сеть. На рисунке 2 вы можете видеть, что ветка гиперболы естественной характеристики не пересекает ось ординат (отрицательная скорость отсутствует).
Торможение противовключением получают путем переключения выводов якорной обмотки.
ДПТ ПВ нельзя соединять с механизмом при помощи ременной передачи, так как соскакивание или разрыв ремня приведет к разгрузке двигателя, что вызовет мгновенное повышение числа оборотов и последующему выходу из строя.
ДПТ ПВ нашли свое основное применение в качестве тяговых двигателей подвижного состава электровозов общего назначения, электровозов метрополитена и в трамваях.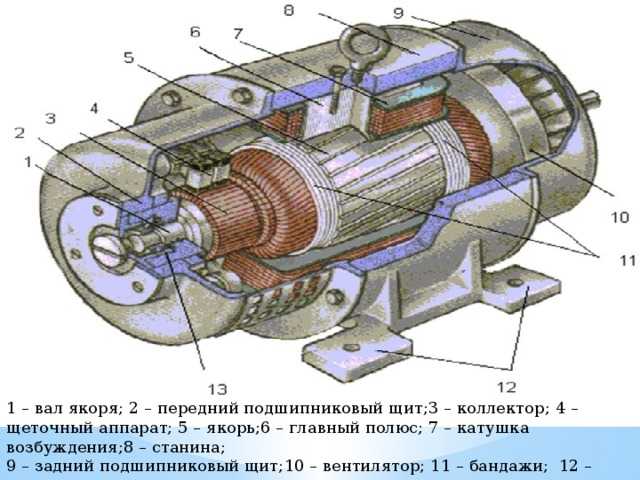
Электродвигатель постоянного тока: схема подключения, принцип работы
Статьи
Автор Светозар Тюменский На чтение 3 мин. Просмотров 13.8k. Опубликовано
Обновлено
Электродвигатели постоянного тока действуют на основе использования принципа магнитной индукции и применяются на производстве в тех случаях, когда необходимо обеспечить регулировку скорости вращения в различных диапазонах, но с высокой точностью. На сегодняшний день существует множество вариантов исполнения электродвигателей постоянного тока. В зависимости от необходимой мощности их работа может обеспечиваться как за счет постоянных магнитов, так и за счет электромагнитов.
Содержание
- Схема подключения электродвигателя постоянного тока
- Устройство электродвигателя постоянного тока
- Принцип действия электродвигателя постоянного тока
- Электродвигатель постоянного тока 12 Вольт
- Электродвигатель постоянного тока П -11 С1 У4 работа
- Двигатель постоянного тока (часть 1)
- Электродвигатели постоянного тока
Схема подключения электродвигателя постоянного тока
Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
Устройство электродвигателя постоянного тока
Любой электродвигатель состоит из двух основных частей станины (статора) и якоря. На внутренней поверхности статора располагаются полюсы, которые изготавливаются из тонких листов электротехнической стали, изолируются друг от друга при помощи лака и заканчиваются расширениями – наконечниками. Эти наконечники предназначены для равномерного распределения магнитной индукции в воздушном зазоре. Уже непосредственно на самих полюсах располагаются несколько обмоток возбуждения. При этом некоторые из обмоток изготавливаются с большим количеством витков тонкого провода, в то время как конструкция других предполагает малое число витков толстого провода.
Якорь представляет собой зубчатый цилиндр, который устанавливается на валу внутри статора и состоит из пакетов тонких листов электротехнической стали изолированных друг от друга. Стоит отметить, что между каждым отдельным пакетом находятся специальные каналы, предназначенные для вентиляции. В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.
В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.
Принцип действия электродвигателя постоянного тока
В основе принципа работы любого современного электродвигателя постоянного тока лежит принцип магнитной индукции, а также «Правило левой руки». В том случае, если по верхней части обмотки якоря пропустить ток в одном направлении, а по нижней в другом, то он начнет вращаться. Это обусловлено тем, что по правилу левой руки, проводники, которые уложены непосредственно в пазах якоря, будут выталкиваться из магнитного поля, которое создается станиной.
Таким образом, верхняя часть будет выталкиваться влево, а нижняя – вправо, что приведет к вращению самого якоря, поскольку вся энергия от проводников будет передаваться и ему. Однако, в тот момент, когда проводники провернутся и части якоря поменяются местами расположения, его вращение остановится. Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.
Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.
Электродвигатель постоянного тока 12 Вольт
На сегодняшний день этот тип электродвигателей является одним из самых популярных. Это обусловлено тем, что именно двигатели с таким напряжением устанавливаются на большинство автомобилей и не только на них, но и на множество другой техники, которая применяется для решения самых разнообразных задач.
Электродвигатель постоянного тока П -11 С1 У4 работа
Двигатель постоянного тока (часть 1)
Электродвигатели постоянного тока
Оцените автора
Электродвигатели постоянного тока.
 Доступные двигатели постоянного тока в Украине с доставкой
Доступные двигатели постоянного тока в Украине с доставкой
Электропривод
Асинхронный
Серво
Постоянного тока
Электродвигатели
Асинхронные
Синхронные
Постоянного тока
Серво
Кабель, провод и аксессуары
Кабели и провода силовые, контрольные и управления
Кабели передачи данных
Оптические кабели
Кабельные вводы
Устройства управления и сигнализации
Модули ввода/вывода, устройства связи
Кнопки и светосигнальная аппаратура
Реле
Логические реле и контроллеры
Панели оператора
Датчики и измерители-регуляторы
Для управления и защиты электродвигателем
Автоматические выключатели защиты двигателя
Контакторы
Реле перегрузки
Устройства плавного пуска
Для распределения электроэнергии
Автоматические выключатели
УЗО и диф.
автоматыВыключатели нагрузки
Предохранители
Кулачковые переключатели
Шкафы, боксы и щитки
Распределительные блоки
Клеммы
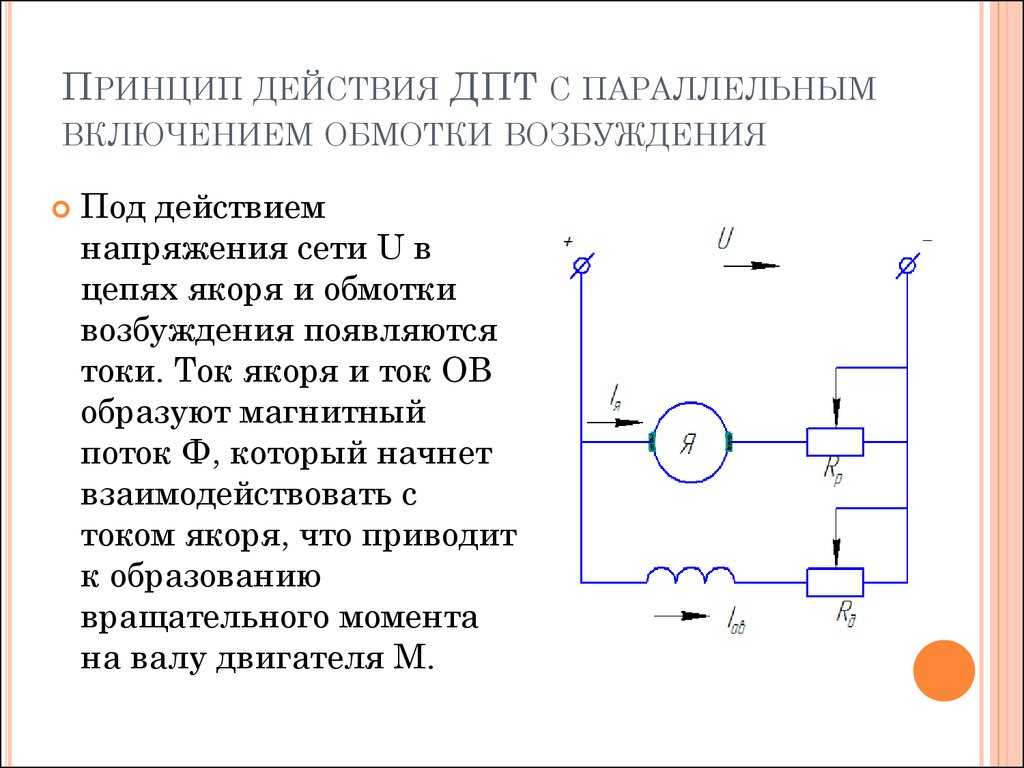 автоматы
автоматы
Электропривод
Все сразу
Control Techniques
ABB
СHINT
ОВЕН
Все сразу
Control Techniques
Все сразу
Control Techniques
АВВ
Электродвигатели
Все сразу
LEROY-SOMER
ABB
Все сразу
LEROY-SOMER
ABB
Все сразу
LEROY-SOMER
ABB
Все сразу
СONTROL TECHNIQUES DYNAMICS
Кабель, провод и аксессуары
Все сразу
LAPP
Все сразу
LAPP
Все сразу
LAPP
Все сразу
LAPP
Устройства управления и сигнализации
Все сразу
ОВЕН
Все сразу
CHINT
ABB
Все сразу
CHINT
ABB
Все сразу
ABB
OBEH
Все сразу
Control Techniques
ABB
ОВЕН
Все сразу
ОВЕН
Для управления и защиты электродвигателем
Все сразу
CHINT
ABB
Все сразу
CHINT
ABB
Все сразу
CHINT
ABB
Все сразу
CHINT
ABB
SIEMENS
ОВЕН
Для распределения электроэнергии
Все сразу
CHINT
ABB
EATON
Все сразу
CHINT
ABB
Все сразу
CHINT
ABB
Все сразу
ABB
Все сразу
ABB
CHINT
Все сразу
CHINT
ABB
Все сразу
CHINT
ABB
Все сразу
CHINT
ABB
Электропривод
Электродвигатели
Кабель, провод и аксессуары
Устройства управления и сигнализации
Для управления и защиты электродвигателем
Для распределения электроэнергии
Серии
Электропривод
Электродвигатели
Кабель, провод и аксессуары
Устройства управления и сигнализации
Для управления и защиты электродвигателем
Для распределения электроэнергии
| |||||||||
На самом базовом уровне электродвигатели существуют для Основные принципы электромагнитного
Многие более поздние экспериментаторы внесли ряд Примечания: 1. Обратите внимание, что мотор-редукторы |
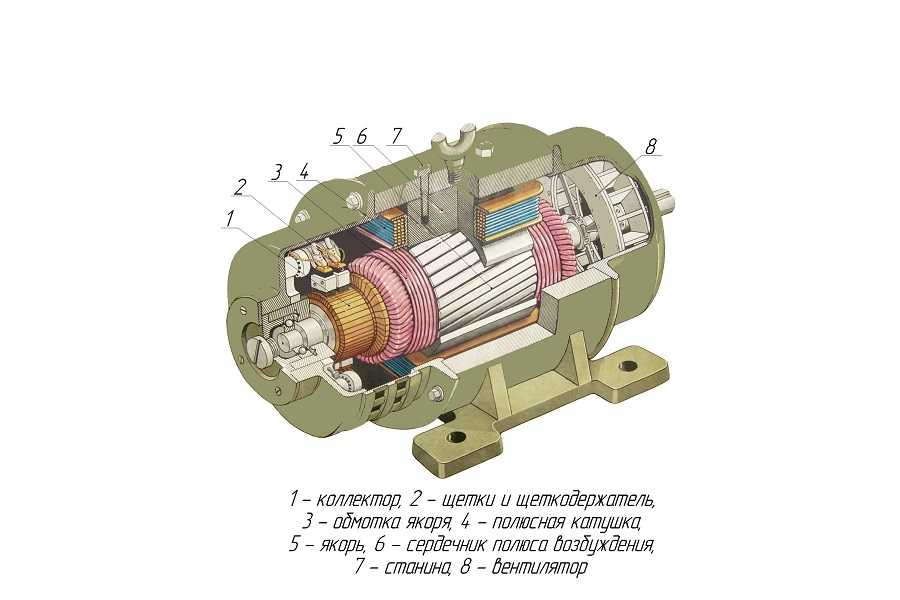 Предпосылки и история
Предпосылки и история ОКРУГ КОЛУМБИЯ
ОКРУГ КОЛУМБИЯ Фарадей приступил к работе
Фарадей приступил к работе Это была первая демонстрация
Это была первая демонстрация Би-би-си
Би-би-си Два вертикальных
Два вертикальных
 Обратите внимание, что Осетр использовал подкову.
Обратите внимание, что Осетр использовал подкову.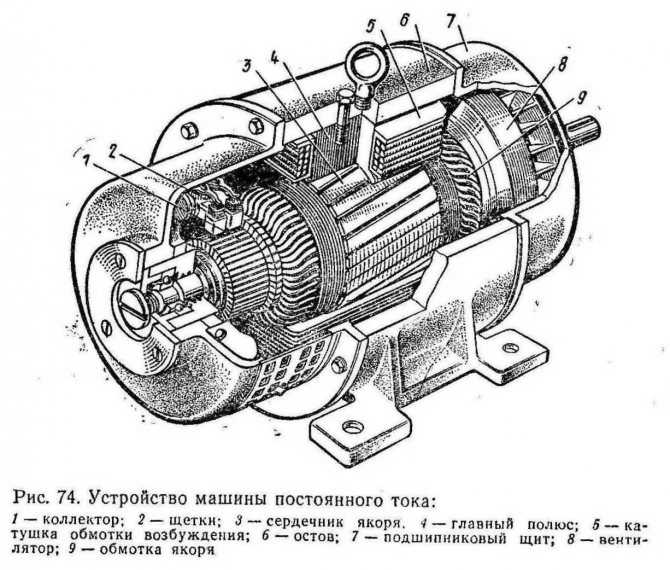 ..
..Что нужно знать
Ключевые выводы
Узнайте о функциях двигателей постоянного и переменного тока.
Узнайте о различных типах двигателей постоянного и переменного тока.
Получите более полное представление о различных методологиях, используемых в двигателях постоянного и переменного тока.
Различные электродвигатели переменного и постоянного тока.
В 1834 году Томас Дэвенпорт разработал первый электродвигатель, достаточно мощный для выполнения реальных задач. Однако были более ранние итерации, разработанные Майклом Фарадеем и Джозефом Генри, но их устройства были недостаточно мощными для выполнения задачи.
Перенесемся в наши дни, и вы увидите, как технология электродвигателей используется в почти бесконечном списке приложений. Будь то электрический автомобиль (двигатель постоянного тока) или родстер Tesla, использующий асинхронный двигатель переменного тока с медным ротором, технология электродвигателей используется повсюду.
Электродвигатель
Как я уверен, вы знаете, мы можем питать электродвигатель как от постоянного тока (постоянный ток), так и от переменного тока (переменный ток). История подтверждает, что двигатели постоянного тока появились раньше двигателей переменного тока, и они появились только через 30 лет после изобретения батареи. Однако, как и практически каждое устройство в области электроники, каждый тип обладает определенными преимуществами и недостатками.
Хотя оба типа двигателей работают по-разному, они имеют одну общую функциональную характеристику: оба используют мощность электромагнитного (ЭМ) поля. Чтобы полностью понять функциональность двигателей, мы должны сначала изучить основные принципы электромагнитных полей и компоненты, из которых состоят эти двигатели.
Электродвигатель переменного тока использует как вторичную, так и первичную обмотку (магнит) для достижения функциональности. Первичная обмотка подключается непосредственно к генератору или сети переменного тока, где она получает свою энергию. Вторичная обмотка получает энергию от первичной без необходимости прямого контакта. Это сложное и жизненно важное явление называется индукцией.
Функциональность асинхронных и электрических двигателей
Электромагнитная индукция — это создание тока в проводнике, когда он движется в магнитном поле. Магнит создает линии магнитной силы, и железные опилки выстраиваются вдоль этих невидимых линий потока.
В соответствии с законом индукции Фарадея, если вы перемещаете провод вперед и назад в магнитном поле, вы пересекаете эти силовые линии. Магнитное поле прикладывает силу к электронам внутри металла. Как вы, возможно, знаете, у меди 27 электронов, и последние два на орбите легко перемещаются к соседним атомам. Это активное движение электронов называется электрическим потоком.
Когда вы перемещаете полный виток провода в магнитном поле, вы создаете мощный поток электронов. Таким образом, сила или мощность вашего двигателя зависит от следующих параметров:
l = длина проводника в пределах магнитного поля
v = скорость ротора или скорость проводника
B = напряженность электромагнитного поля
e = эффективность
e = эффективность Таким образом, КПД электродвигателя или генератора выглядит следующим образом:
e = B * l * v
Функциональность электродвигателя
Хотя существует две общие категории электродвигателей и различные подтипы, все они делят схожие компоненты. Например, во всех двигателях используется статор, состоящий из намотанных изолированных проводов или постоянного магнита. В двигателях также используется якорь (ротор), который обычно находится посередине и подвергается воздействию магнитного поля статора. Полюса якоря вращаются и отталкиваются и притягиваются различными полюсами статора.
Например, во всех двигателях используется статор, состоящий из намотанных изолированных проводов или постоянного магнита. В двигателях также используется якорь (ротор), который обычно находится посередине и подвергается воздействию магнитного поля статора. Полюса якоря вращаются и отталкиваются и притягиваются различными полюсами статора.
Длина провода электромагнита внутри статора вместе с напряжением определяет крутящий момент или мощность двигателя. Кроме того, чем длиннее провод, т. е. чем больше витков в статоре, тем сильнее магнитное поле. Это приводит к увеличению мощности для вращения ротора.
Еще одним жизненно важным компонентом двигателя являются его обмотки. Катушка или обмотка, которая обычно представляет собой медные провода, намотанные на сердечник, либо генерирует, либо получает электромагнитную энергию. Кроме того, провод, используемый в обмотках, должен быть изолирован, и наиболее распространенным материалом, используемым для обмоток, является медь.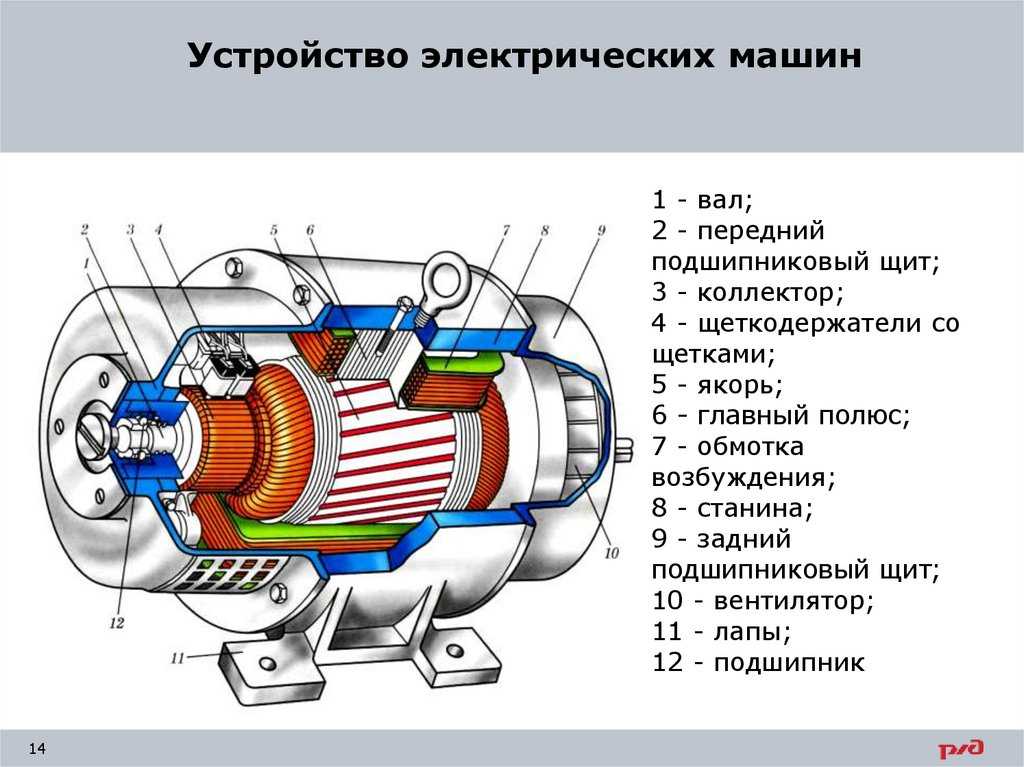 Хотя вы столкнетесь с алюминием при использовании, он требует большей толщины, чтобы безопасно выдерживать ту же электрическую нагрузку, что и его медный аналог. Я уверен, вы можете себе представить, что это приводит к уменьшению размера двигателя при использовании медных обмоток по сравнению с алюминиевыми.
Хотя вы столкнетесь с алюминием при использовании, он требует большей толщины, чтобы безопасно выдерживать ту же электрическую нагрузку, что и его медный аналог. Я уверен, вы можете себе представить, что это приводит к уменьшению размера двигателя при использовании медных обмоток по сравнению с алюминиевыми.
Двигатели постоянного тока по сравнению с двигателями переменного тока
В целом преимущества двигателей постоянного тока включают:
Более высокий пусковой момент
Более быстрый запуск и остановка
Более быстрый реверс
Скорость зависит от изменения входного напряжения
Простота управления
Экономическая эффективность в требуемой методологии контроля
В целом, мы делим двигатели постоянного тока на две подкатегории.
1. Матовый, который подразделяется на типы, такие как:
Постоянный магнит
Шунтовая обмотка
Серийная обмотка
Составная обмотка
Отдельное возбуждение
2. Бесщеточный, который также делится на подтипы, такие как:
Однофазный
Двухфазный
Трехфазный
Коллекторный двигатель постоянного тока
Коллекторный двигатель постоянного тока состоит из четырех компонентов:
Статор: создает стационарное магнитное поле, которое окружает ротор, и создает это поле либо с помощью постоянных магнитов, либо с помощью электромагнитных обмоток.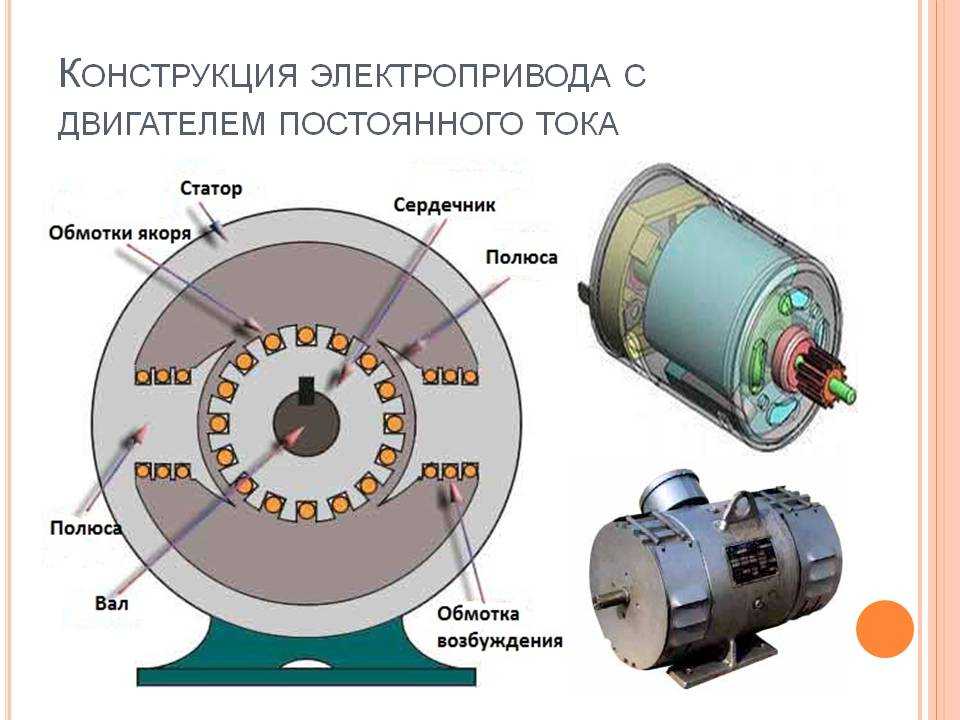
Ротор или якорь: Состоит из одной или нескольких обмоток. Как указывалось ранее, всякий раз, когда на обмотки подается напряжение, они создают магнитное поле. Магнитные полюса поля ротора притягиваются к противоположным полюсам, создаваемым статором, что способствует вращению ротора.
Теперь, когда двигатель вращается, обмотки получают постоянное питание в различных последовательностях, чтобы гарантировать, что магнитные полюса, создаваемые ротором, не перекрывают полюса, созданные в статоре. Кроме того, переключение поля в обмотках ротора — это то, что мы называем «коммутацией».
Щетки: Обратите внимание, что щеточный двигатель постоянного тока не нуждается в контроллере для переключения тока в обмотках двигателя. В качестве альтернативы он использует механическую коммутацию своих обмоток. Коллектор или медная втулка находится на оси ротора. Когда двигатель вращается, угольные щетки скользят по коллектору и соприкасаются с различными секциями коллектора.
Эти секции присоединяются к различным обмоткам ротора, создавая магнитное поле (динамическое) в двигателе, когда мы подаем напряжение на щетки двигателя. Что касается проблем с двигателем постоянного тока, коллектор и щетки являются двумя наиболее распространенными причинами отказа двигателя из-за износа.
Коллектор: Когда ротор вращается внутри статора, щетки трутся о различные секции коммутатора, таким образом обеспечивая заряд этой секции и соответствующей обмотке. Кроме того, когда щетки проходят через зазоры коммутатора, обеспечиваемый ими электрический заряд переключает секции или сегменты коммутатора.
В результате этого действия меняется электрическая полярность обмоток ротора. Это также создает притяжение различных полярностей и поддерживает вращение ротора в поле статора. Пока есть напряжение питания, процесс будет продолжаться.
С точки зрения недостатков щеточного двигателя постоянного тока, его щетки производят как искры, так и трение. Результат этих побочных эффектов обычно приводит к перегреву устройства, что ограничивает максимальную скорость вращения. Другой недостаток щеточного двигателя постоянного тока также связан с образованием искр. Эти искры создают радиочастотные помехи (РЧП).
Результат этих побочных эффектов обычно приводит к перегреву устройства, что ограничивает максимальную скорость вращения. Другой недостаток щеточного двигателя постоянного тока также связан с образованием искр. Эти искры создают радиочастотные помехи (РЧП).
Бесколлекторный двигатель постоянного тока
Насколько вам известно, бесколлекторный двигатель постоянного тока доступен в трех конфигурациях, наиболее распространенной является трехфазная конфигурация.
Основное различие в конструкции двух типов двигателей (щеточный и бесщеточный) заключается в замене механического коммутатора электрической цепью переключателя. Обратите внимание, что бесщеточный двигатель постоянного тока, как следует из названия, не имеет щеток. Это синхронный двигатель, потому что магнитное поле статора и ротор вращаются с одинаковой частотой.
Бесщеточный двигатель постоянного тока состоит из следующих компонентов:
Статор: физические характеристики статора в бесщеточном двигателе постоянного тока аналогичны характеристикам асинхронного двигателя. Он состоит из уложенных друг на друга пластин (стальных) с прорезанными пазами (в осевом направлении) для его намотки. Однако обмотка бесщеточного двигателя постоянного тока немного отличается от обмотки типичного асинхронного двигателя.
Он состоит из уложенных друг на друга пластин (стальных) с прорезанными пазами (в осевом направлении) для его намотки. Однако обмотка бесщеточного двигателя постоянного тока немного отличается от обмотки типичного асинхронного двигателя.
Ротор: Компонент ротора бесщеточного двигателя постоянного тока состоит из постоянного магнита из редкоземельного сплава. Кроме того, в зависимости от приложения количество полюсов будет варьироваться от двух до восьми, а северный и южный полюса будут располагаться попеременно. Другая конфигурация ротора в бесщеточном двигателе постоянного тока представляет собой встроенный магнит, в котором прямоугольный постоянный магнит (ы) встроен в сердечник ротора. В другой конфигурации ротора они вставляют магниты внутрь железного сердечника ротора.
Датчик положения: бесщеточные двигатели постоянного тока контролируют свои коммутации электронным способом, поскольку он не имеет щеток. Чтобы вращать свой ротор, он последовательно возбуждает обмотки статора. Это требует знания положения ротора, чтобы точно подавать питание на определенные наборы обмоток статора. Это функция датчика положения; он определяет положение ротора и преобразует его в электрический сигнал.
Это требует знания положения ротора, чтобы точно подавать питание на определенные наборы обмоток статора. Это функция датчика положения; он определяет положение ротора и преобразует его в электрический сигнал.
Двигатель переменного тока
Преимущества двигателя переменного тока включают минимальное техническое обслуживание и меньшую потребность в мощности при запуске. В целом двигатели переменного тока эффективны, долговечны и бесшумны, что делает их очень востребованными для некоторых приложений.
Два типа двигателей переменного тока:
Синхронный: как следует из названия, этот двигатель вращается с частотой подаваемого тока и состоит из ротора и статора.
Асинхронный: это один из наиболее распространенных типов двигателей, простой и прочный. Эти двигатели состоят из ротора и статора с обмоткой. Электромагнитная индукция в обмотке статора создает силу для вращения ротора.
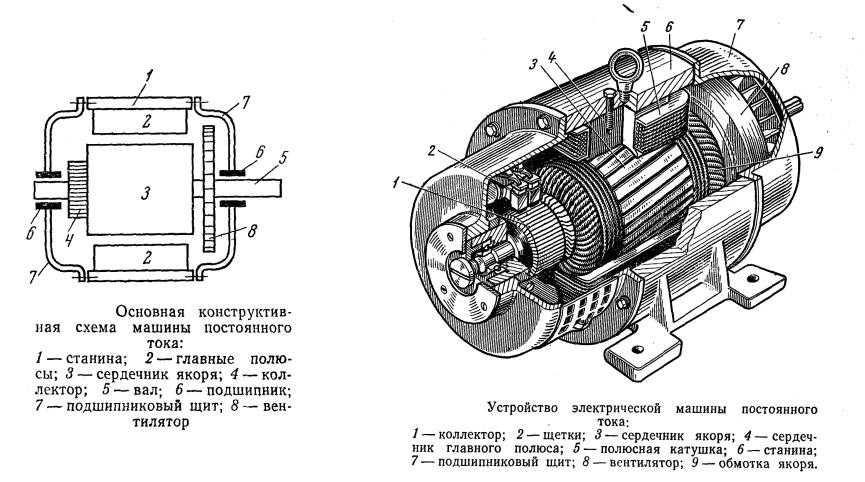
В целом, двигатели постоянного и переменного тока выполняют одну и ту же функцию — преобразование электрической энергии в механическую. Самым принципиальным отличием, конечно же, является их источник питания. Кроме того, определенные типы двигателей постоянного тока требуют большего обслуживания, имеют ограниченную скорость и более короткие жизненные циклы. Однако асинхронные двигатели переменного тока невероятно прочны и имеют более длительный срок службы. Наконец, еще одно существенное отличие — контроль скорости. Для сравнения, двигатели постоянного тока используют ток обмотки ротора, тогда как двигатели переменного тока регулируют скорость, изменяя частоту подаваемого тока.
Внутренний вид двигателя постоянного тока.
Независимо от того, какой тип двигателя вы выберете для своей электронной конструкции, наличие правильного набора программного обеспечения для проектирования и анализа — единственный способ гарантировать успешное внедрение. OrCAD PCB Designer имеет полный набор функций проектирования и анализа, чтобы ваша печатная плата была сделана правильно с первого раза.
OrCAD PCB Designer имеет полный набор функций проектирования и анализа, чтобы ваша печатная плата была сделана правильно с первого раза.
Если вы хотите узнать больше о том, какое решение у Cadence есть для вас, обратитесь к нам и нашей команде экспертов.
Решения Cadence PCB — это комплексный инструмент для проектирования от начала до конца, позволяющий быстро и эффективно создавать продукты. Cadence позволяет пользователям точно сократить циклы проектирования и передать их в производство с помощью современного отраслевого стандарта IPC-2581.
Подпишитесь на LinkedIn
Посетить сайт
Больше контента от Cadence PCB Solutions
Загрузка, подождите
Ошибка — что-то пошло не так!
Хотите последние новости о печатных платах?
Подпишитесь на нашу ежемесячную рассылку новостей
Спасибо!
Управление двигателем постоянного тока с помощью Н-моста
В этом эксперименте мы будем управлять двигателем с помощью расширения ШИМ. Для этого мы будем использовать чип H-Bridge и отправлять ему соответствующие управляющие сигналы с расширением PWM, после чего H-Bridge позаботится о запуске двигателя. Попутно мы узнаем, как именно работают H-мосты, и создадим больше классов, использующих преимущества тех, которые мы создали ранее. Чтобы расширить это, мы подключим три переключателя и запрограммируем Omega для управления скоростью и направлением двигателя в зависимости от их положения.
Для этого мы будем использовать чип H-Bridge и отправлять ему соответствующие управляющие сигналы с расширением PWM, после чего H-Bridge позаботится о запуске двигателя. Попутно мы узнаем, как именно работают H-мосты, и создадим больше классов, использующих преимущества тех, которые мы создали ранее. Чтобы расширить это, мы подключим три переключателя и запрограммируем Omega для управления скоростью и направлением двигателя в зависимости от их положения.
Если вам нужно напомнить, как работает ШИМ (или широтно-импульсная модуляция), вы можете найти объяснение в первом эксперименте с диммированием светодиодов.
Как работают двигатели постоянного тока
Самый простой из всех двигателей, двигатель постоянного тока вращается, когда на него подается постоянное напряжение. Такой двигатель можно найти в дронах, электроинструментах и роботах. Двигатель постоянного тока может изменять скорость и направление в зависимости от того, сколько энергии подается на него и в каком направлении.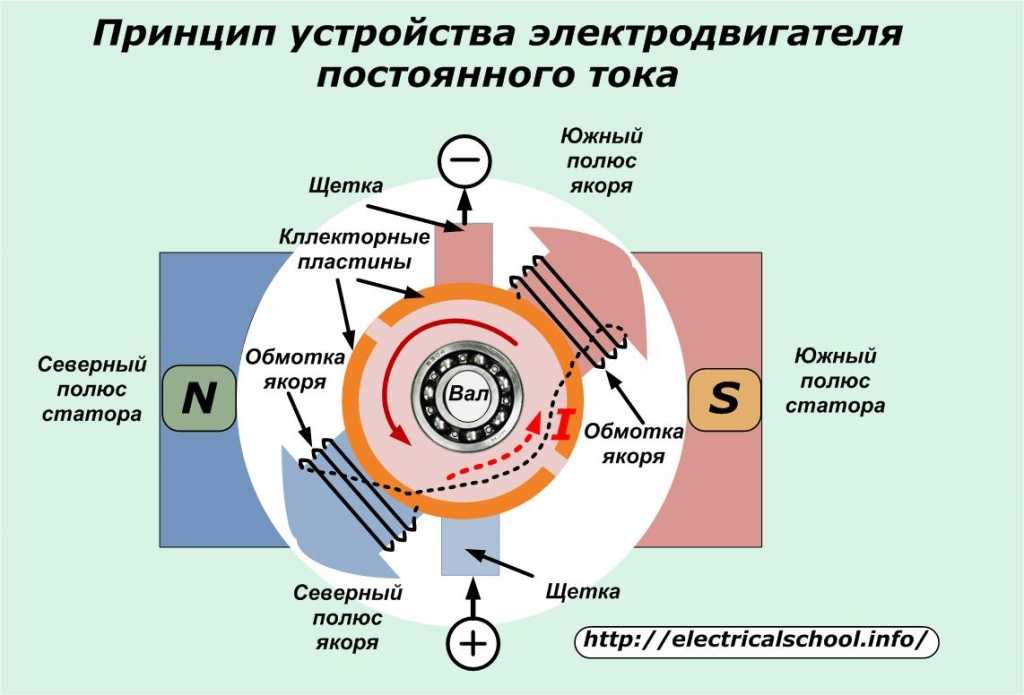
Двигатель постоянного тока использует магнитное поле, создаваемое электромагнитом, для вращения якоря двигателя. Электромагнит активируется подачей напряжения, поэтому, когда питание включено, магнитное поле, которое он генерирует, заставит якорь (катушка провода) генерировать собственное магнитное поле, эти поля отталкивают друг друга и заставляют якорь вращаться.
Чтобы двигатель вращался в другую сторону, нам нужно изменить приложенное напряжение, то есть поток тока через двигатель будет противоположным. К сожалению, переключение направления тока с контроллера, такого как Omega, затруднено. Процессоры используют низкий ток и напряжение, плюс они обычно отсоединяются от двигателя, чтобы индуктивная обратная связь не нарушала их работу.
Если бы только существовало какое-то устройство, которое могло бы помочь нам контролировать мощность, которую мы подаем на наши двигатели постоянного тока…
Обратите внимание, что подача тока на обе клеммы может привести к повреждению двигателя.

Как работают Н-мосты
Н-мост — это схема, позволяющая подавать напряжение на нагрузку в любом направлении. Электрический ток течет от источника к земле, и многие компоненты должны быть ориентированы в соответствии с направлением тока, чтобы они работали должным образом. H-мост — это схема, построенная для изменения направления напряжения и, следовательно, тока, протекающего к нагрузке.
С точки зрения электричества, нагрузка — это любой элемент цепи, который потребляет электроэнергию для выполнения каких-либо действий — нагрева, включения, освещения и т. д.
H-мост состоит из четырех коммутаторов: двух последовательно и двух параллельно, при этом нагрузка размещается между коммутаторами. В этой конфигурации схема принимает форму буквы «Н».
Для изменения направления подаваемого напряжения H-Bridge управляет переключателями, подающими питание на нагрузку ( S1 ).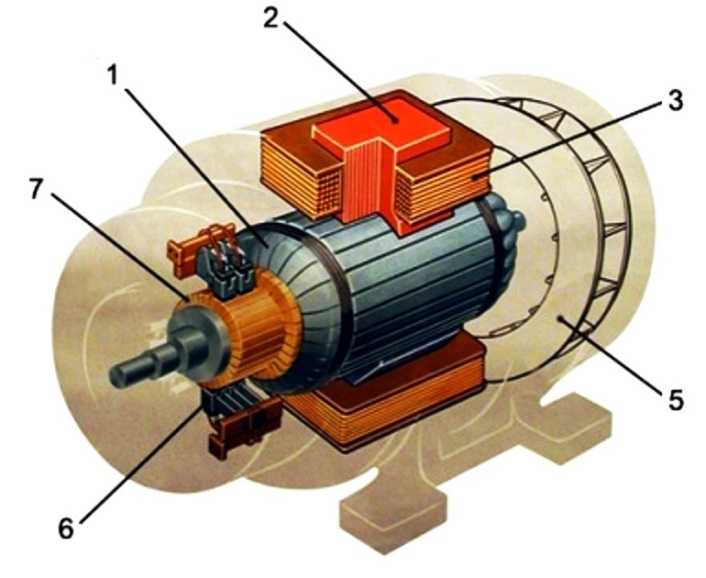 Глядя на схему, если мы замкнем
Глядя на схему, если мы замкнем S1 и S4 , оставив остальные открытыми, напряжение будет прикладываться к двигателю слева направо. Если вместо этого замкнуты S2 и S3 , а остальные разомкнуты, напряжение будет подаваться справа налево.
Эта конфигурация может вызвать короткое замыкание, поэтому большинство H-мостов не позволяют напрямую управлять этими коммутаторами.
Типичные области применения
Несколько типичных применений схем H-Bridge:
* Создайте переменный ток (переменный ток) из источника постоянного тока, используя сигнал ШИМ для управления H-мостом. Это процесс, известный как инверсия мощности.
* Обеспечьте возможность обратного тока через двигатель постоянного тока, позволяя вращение в любом направлении.
Кроме того, Н-образные мосты позволяют питать нагрузки независимо от управляющих сигналов, обеспечивая изоляцию цепей.
ШИМ-сигнал приводит в действие двигатель за счет очень быстрого включения и выключения источника питания. Обычно это можно сделать, отправив сигнал ШИМ на транзистор, и транзистор переключит питание. Изменяя ширину импульса ШИМ-сигнала, можно управлять скоростью двигателя. H-мост может заменить транзистор и добавить функциональность, позволяя легко изменять направление тока. Мы по-прежнему посылаем пульсирующий сигнал на H-мост, чтобы контролировать скорость, за исключением того, что теперь мы можем переключать направление тока, меняя переключатели, которые разомкнуты.
Обычно это можно сделать, отправив сигнал ШИМ на транзистор, и транзистор переключит питание. Изменяя ширину импульса ШИМ-сигнала, можно управлять скоростью двигателя. H-мост может заменить транзистор и добавить функциональность, позволяя легко изменять направление тока. Мы по-прежнему посылаем пульсирующий сигнал на H-мост, чтобы контролировать скорость, за исключением того, что теперь мы можем переключать направление тока, меняя переключатели, которые разомкнуты.
В нашей схеме мы будем использовать микросхему интегральной схемы H-моста ( IC ), поэтому нам не нужно самостоятельно подключать внутренние компоненты, а также для предотвращения коротких замыканий, которые могут возникнуть, если мы будем напрямую управлять этими переключателями.
Если вы хотите начать строить прямо сейчас, перейдите к следующему разделу. Если вы хотите узнать, как сигналы из нашего кода будут управлять двигателем, читайте дальше!
Чип SN754410 H-Bridge
Чип SN754410 содержит два H-моста, что дает нам четыре выхода, что позволяет нам управлять двумя двигателями постоянного тока.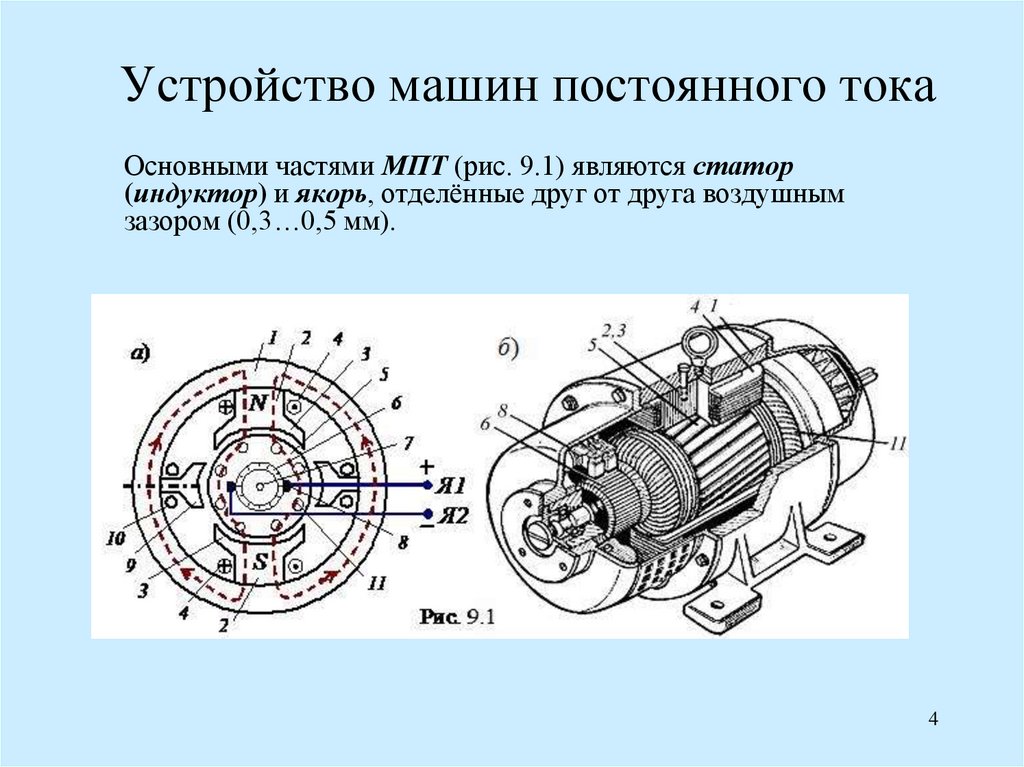 На данный момент мы будем управлять только одним двигателем.
На данный момент мы будем управлять только одним двигателем.
Таким образом, вместо переключателей 1/2/3/4 мы будем переключать 1A и 2A (как показано в техническом описании). В этом уроке мы будем использовать один из двух H-мостов для управления мощностью, подаваемой на два входа вашего двигателя постоянного тока. В частности, пара входов и выходов ( 1A , 2A и 1Y , 2Y ) на левой стороне микросхемы.
На микросхеме 1A управляет полярностью 1Y , то же самое касается 2A и 2Y . На очень высоком уровне этот чип H-моста изменяет выходное напряжение (на контакты, помеченные Y ) в соответствии с входным напряжением, подаваемым на контакты, помеченные A . Например, отправив «высокий» на 1A , вы отправите его на 1Y . Разница в том, что сигнал, отправляемый на контакты Y , использует напряжение, подаваемое на контакт 8 , независимо от входного напряжения.
Напряжение действует подобно водопаду — оно всегда создает ток, вытекающий из напряжения источник (вверху) к заземлению (внизу). Вы можете представить источник как HIGH , а землю как LOW . Таким образом, если вы подключите двигатель к 1Y и 2Y , он будет двигаться только в том случае, если они посылают различных сигналов .
Контакт 1,2EN просто включает или выключает Н-мост. Если 1,2EN видит «высокий», то все, что мы рассмотрели выше, происходит в штатном режиме, если выключен, то на выходы ничего посылаться не будет, несмотря ни на что 1A и 2A .
Благодаря такой реализации H-моста — с двумя переключателями вместо четырех независимых — микросхема удобно обрабатывает ситуации короткого замыкания и упрощает работу H-моста.
Создание схемы
Эта схема соединяет Omega с двигателем постоянного тока. Omega сначала будет подключена к расширению PWM, расширение PWM будет отправлять сигналы на H-мост, который будет подавать питание на двигатель постоянного тока в соответствии с сигналами. ШИМ будет сигнализировать, как быстро должен вращаться двигатель, а Н-мост действует как переключатель, включая или выключая напряжение питания в соответствии с сигналом ШИМ.
Omega сначала будет подключена к расширению PWM, расширение PWM будет отправлять сигналы на H-мост, который будет подавать питание на двигатель постоянного тока в соответствии с сигналами. ШИМ будет сигнализировать, как быстро должен вращаться двигатель, а Н-мост действует как переключатель, включая или выключая напряжение питания в соответствии с сигналом ШИМ.
На рисунках вы видите несколько более коротких проводов, которые мы использовали вместо перемычек, чтобы дать вам лучшее представление о том, что происходит. Чтобы было легче увидеть вращение двигателя, мы обмотали ось двигателя скотчем.
Примечание : Как видно выше, чип имеет грубое зеркальное отображение. Верхний правый и нижний левый контакты — это питание для выходов ( контакт 8 ) и микросхемы ( контакт 16 ) соответственно. Разница между двумя выводами питания заключается в том, что напряжение, подаваемое на выходы, может достигать 36 В, а напряжение, подаваемое на микросхему, рекомендуется в пределах 2–5 В. Если вы хотите запитать большой двигатель, вам следует запитать двигатель от внешнего источника через контакт 8 и подать около 3 В на контакт 16 .
Вот диаграмма, к которой можно обратиться, если что-то пойдет не так:
Что вам понадобится
Вам может понадобиться пара резиновых лент и блок, чтобы удерживать двигатель постоянного тока во время его работы. В целом, вот что вы будете использовать для создания схемы:
- 1x Omega2, подключенный к док-станции расширения
- 1x PWM Expansion подключен к док-станции расширения над
- 1x двигатель постоянного тока
- 1x H-мост (имеет «SN754410» поверх микросхемы)
- 1 макетная плата
- 3 переключателя SPDT
- Проволочные перемычки
- 4x M-F
- 18x М-М
Подключение компонентов
При работе с микросхемами установка направляющих макетной платы может быть очень полезна для уменьшения беспорядка. Для этого эксперимента мы сначала сделаем это, чтобы уменьшить количество необходимых проводов.
- Соедините отрицательные (
-) шины с обеих сторон платы вместе на одном конце (обычно конец, удаленный от большей части проводки) с помощью перемычки M-M, назовем ееЗЕМЛЯрейка. - Проделайте то же самое с положительными (
+) шинами, в этом эксперименте мы назовем эти шиныVcc.
Теперь давайте настроим нашу схему:
- Возьмите H-мост, выберите место на макетной плате и подключите H-мост через канал в середине макетной платы. Он должен располагаться одной стороной в столбце E, а другим — в столбце F, при этом полукруглый вырез должен быть направлен к концу макетной платы. Мы выбрали строки с 5 по 12 на нашей макетной плате.
- Обратите внимание на номер каждого контакта на приведенной выше диаграмме. Если вы заблудились, всегда ищите небольшой вырез в виде полукруга на чипе, обозначающий «верхнюю часть» H-моста, чтобы правильно сориентировать его.
- Это важно, вы можете повредить H-мост, если он подключен неправильно!
- Давайте сначала подключим все заземляющие соединения — контакты
4,5,12и13на H-мосте являются контактами заземления, поэтому давайте подключим их кGNDна соответствующих сторонах с помощью четырех перемычек M-M. Мы использовали короткие провода, чтобы вы могли видеть, что происходит.
- Теперь пришло время подключить двигатель к H-мосту, двигатель должен иметь два провода со штыревыми разъемами, один красный и один черный. Они будут подключены к контактам Н-моста через макетную плату.
- Подсоедините белый провод к
1YН-моста (ряд 7 на нашей макетной плате). - Подключить черный провод к
2YН-моста (ряд 10 на нашей плате).
- Подсоедините белый провод к
- Далее настроим переключатели — с их помощью мы будем контролировать, какие цифровые сигналы отправляются на ШИМ-расширение, а в свою очередь мотор через H-мост:
- Выберите три набора из трех рядов (мы использовали ряды с 14 по 24)
- Вставьте переключатели в ряды, по три ряда на переключатель — для каждого переключателя требуется зазор в половину ряда между соседними переключателями, если вы хотите разместить их рядом.
- С помощью 6 перемычек M-M соедините крайний левый ряд каждого коммутатора с шиной
GND, а крайний правый ряд каждого коммутатора — с шинойVcc.
Теперь, когда схема Н-моста готова, давайте подключим все это к вашей Omega, чтобы она могла управлять двигателем:
- Мы заземлим цепь, соединив шину
GNDс шинойGND. контакт на каналеS0на расширении ШИМ с одной перемычкой MF. - Используя 3 перемычки M-M, подключите центральный ряд каждого коммутатора к Omega GPIO0, GPIO1 и GPIO2 на разъемах расширения. Убедитесь, что вы помните, что есть что, так как позже они будут управлять вашим двигателем!
- Возьмите одну перемычку M-M и соедините
1,2ENна микросхеме (ряд 5 на нашей плате) с шинойVcc. - Используя две перемычки M-F,
- Подключить
1A, или ряд 6 на нашей плате, к каналуS0. - Подключить
2A, или ряд 11, в каналS1.
- Подключить
- И последнее, но не менее важное: мы установим питание на шину Vcc, подключив оборванный конец перемычки Vcc (красный) к контакту
VccканалаS0расширения PWM.
Вот как это выглядит, когда все подключено:
Меры предосторожности при подключении
Вы, возможно, заметили, что мы подключили все компоненты макета и соединения GPIO сначала до подключение основной линии электропередач. Мы делаем это, чтобы свести к минимуму риск ошибок при подключении проводки и питания цепи, которая потенциально может повредить компоненты или Omega. Это хорошая практика, и мы будем строить схемы таким образом на протяжении всех этих экспериментов.
Если вы действительно хотите убедиться, что ваши компоненты безопасны перед проведением эксперимента, вы можете оставить Omega ВЫКЛЮЧЕННЫМ перед подключением питания к цепи. Как только все будет подключено, вы можете снова включить Omega.
Есть причина, по которой мы используем контакты
GNDиVccна плате расширения PWM Expansion вместо контактов заголовка от док-станции. Если он подключен к штырьковым контактам, двигатель будет подавать напряжение обратной связи на док-станцию расширения. Это может привести к зацикливанию загрузки или другому непредсказуемому поведению омеги. На контактахVcc/GNDмодуля PWM Expansion установлены прерывающие диоды для предотвращения этого.
Написание кода
Давайте добавим определение класса для двигателя постоянного тока, управляемого H-мостом, в файл motors.py , который мы создали в предыдущем эксперименте. Это определение класса будет специально управлять двигателем постоянного тока, подключенным к Н-мосту. Он основан на абстракциях класса OmegaPwm и заботится о деталях управления двигателем.
Откройте motors.py из эксперимента Dimming LEDs и добавьте следующее:
H_BRIDGE_MOTOR_FORWARD = 0
H_BRIDGE_MOTOR_REVERSE = 1
класс hBridgeMotor:
"""Класс, что два цифровых сигнала и ШИМ-сигнал для управления H-мостом"""
def __init__(self, pwmChannel, fwdChannel, revChannel):
# обратите внимание на каналы
self.pwmChannel = pwmChannel
self.fwdChannel = fwdChannel
self.revChannel = revChannel
# настроить объекты
self.pwmDriver = OmegaPwm(self.pwmChannel)
self.pwmDriver.setDutyCycle(0)
self.fwdDriver = OmegaPwm(self.fwdChannel)
self.fwdDriver.setDutyCycle(0)
self.revDriver = OmegaPwm(self.revChannel)
self.revDriver.setDutyCycle(0)
# устанавливаем ограничения
self.minDuty = 0
self.maxDuty = 100
def setupMinDuty (я, обязанность):
"""Установите минимально допустимый рабочий цикл для ШИМ"""
self.minDuty = обязанность
def setupMaxDuty (я, обязанность):
"""Установите максимально допустимый рабочий цикл для ШИМ"""
self. maxDuty = обязанность
сброс защиты (сам):
"""Установите ШИМ на 0%, отключите оба элемента управления H-Bridge"""
рет = self.pwmDriver.setDutyCycle (0)
рет |= self.fwdDriver.setDutyCycle(0)
рет |= self.revDriver.setDutyCycle(0)
вернуться обратно
def spin(я, направление, обязанность):
"""Установите ШИМ на указанную обязанность и в указанном направлении"""
возврат = 0
#0 - вперед, 1 - назад
если (направление == H_BRIDGE_MOTOR_FORWARD):
self.revDriver.setDutyCycle(0)
self.fwdDriver.setDutyCycle(100)
elif (направление == H_BRIDGE_MOTOR_REVERSE):
self.fwdDriver.setDutyCycle(0)
self.revDriver.setDutyCycle(100)
еще:
возврат = -1
если (возврат == 0):
# сверяемся с минимальным и максимальным pwm
если долг < self.minDuty:
долг = self.minDuty
elif duty > self.maxDuty:
долг = self. maxDuty
# запрограммировать рабочий цикл
ret = self.pwmDriver.setDutyCycle(долг)
вернуться обратно
def spinForward(я, долг):
ret = self.spin (H_BRIDGE_MOTOR_FORWARD, обязанность)
вернуться обратно
def spinReverse (я, обязанность):
ret = self.spin (H_BRIDGE_MOTOR_REVERSE, обязанность)
возврат рет Теперь давайте напишем код для эксперимента. Этот код заставит мотор делать что-то, используя класс hBridgeMotor, который мы создали выше. Скрипт попросит вас ввести несколько чисел и заведет мотор на основе вашего ввода!
Создайте файл с именем MAK03-hBridgeExperiment.py и вставьте в него следующий код:
from motors import hBridgeMotor импорт лукаGpio время импорта # настроить каналы расширения PWM, подключенные к H-Bridge IC H_BRIDGE_1A_CHANNEL = 0 H_BRIDGE_2A_CHANNEL = 1 H_BRIDGE_12EN_CHANNEL = 2 # создаем объекты gpio для наших входов переключателей направлениеGPIO = onionGpio.
Чего ожидать
При запуске скрипт запускает ШИМ-генератор, а затем устанавливает выход в активное состояние (канал 0 до 100% нагрузки). Затем скрипт запросит у вас набор из 3-х цифр, первая задает направление мотора, следующие две цифры задают скорость. Программа будет повторно запрашивать ввод и соответствующим образом регулировать скорость и направление.
| Первая цифра | 0 | Двигатель вращается по часовой стрелке |
| 1 | Двигатель вращается против часовой стрелки | |
| Последние две цифры | 00 | от |
| 01 | 50% скорости | |
| 10 | Скорость 60% | |
| 11 | 70% скорость |
Вот он в действии:
Как вы, наверное, уже видели, здесь используется бесконечный цикл, и вы можете прервать его, нажав Ctrl-C .
Примечание : Мы рекомендуем установить двигатель на 000 перед разрывом цепи, чтобы не повредить двигатель. Напоминаем, что вы можете просто вызвать pwm-exp -s , чтобы остановить мотор в терминале или по ssh.
Пристальный взгляд на код
В этом эксперименте мы объединили знания из предыдущих экспериментов для управления двигателем постоянного тока с помощью Python. Теперь мы получаем пользовательский ввод в интерактивном режиме, что позволяет нам изменять вывод в режиме реального времени. Кроме того, мы использовали 93 = 8 различных состояния системы переключения. Это означает, что нам действительно нужно учитывать только 8 отдельных случаев ввода.
К сожалению, это не всегда так просто, и хорошей практикой является предположение, что можно получить все виды входных данных. Здесь большая часть проверки ошибок происходит прямо в начале взаимодействия, ограничивая количество доступных входных состояний — у нас есть только три переключателя. Если бы мы позволили пользователям вводить произвольные команды, нам пришлось бы выполнять гораздо больше проверок.
Таблицы поиска
Вы можете заметить, что ввод, вводимый пользователем в основном цикле, всегда сверяется с переменной motorCommands — эта переменная хранит набор известных значений для проверки. В нашем случае таблица содержит действительный ввод переключателя, совпадающий с его соответствующим выводом, также известный как пара ключ-значение, и сценарий отправляет вывод на ШИМ-контроллер, если ввод, полученный от пользователя, соответствует любому значению в таблице.
Проверяя входные данные по таблице поиска перед отправкой команд, мы можем гарантировать отсутствие ошибочных команд. Соедините это с надлежащей калибровкой, и мы сможем значительно снизить риск удаленного управления оборудованием.
Пределы ШИМ-управления двигателем
Для работы двигателей постоянного тока требуется приложенное напряжение, а использование ШИМ означает, что двигатель фактически «отвечает» серией импульсов. Что-то вроде толкания ящика, чтобы заставить его двигаться, а не быстрого постукивания по нему. Точно так же, как существует минимальное усилие, необходимое для нажатия, чтобы заставить коробку двигаться, существует предел того, насколько коротким может быть каждое нажатие, прежде чем мотор не будет реагировать на него.
То есть, если ширина импульса ниже определенного порога, двигатель не запустится. При тестировании ширина импульса, необходимая для запуска двигателя, составляет около 10 мс, что составляет около 50% нагрузки при частоте 50 Гц.
Попробуйте различные настройки двигателя и посмотрите, как он себя ведет. Если вы тестируете проект с двигателями и хотите замедлить его для отладки, помня об ограничениях ШИМ-управления двигателем, вы сэкономите много времени!
В следующий раз мы выведем текст на экран.
Управление якорем и возбуждением двигателей постоянного тока
Driven By Excellence
Приводы постоянного тока обеспечивают возможность управления скоростью и крутящим моментом мощных двигателей постоянного тока в различных промышленных и других подобных приложениях. Управление скоростью может быть достигнуто с помощью приводов постоянного тока несколькими способами. На клеммы двигателя постоянного тока может быть подано напряжение, или к якорю может быть приложено внешнее сопротивление.
Другой метод заключается в изменении потока на полюс двигателя. Первые два метода включают регулировку якоря двигателя, а последний метод включает регулировку поля двигателя. Эти методы называются «управление якорем» и «управление полем».
Узнайте об основах управления двигателем
Что такое двигатель постоянного тока?
А DC — двигатель постоянного тока — это устройство, которое получает электрическую энергию и преобразует ее в механическую энергию. Они делают это через материал проводника, который проводит ток внутри и передает его на спиральные провода, называемые обмотками. Импульсный ток создает магнитные поля, которые взаимодействуют с магнитами на роторе.
Если магниты и поле притягиваются, двигатель вращается в одну сторону. И наоборот, два отталкивающих поля заставляют двигатель вращаться в противоположном направлении. Коммутатор — внутренний компонент — подает постоянный ток на обмотки, чтобы продолжать генерировать магнитные поля и вращать двигатель.
Двигатели постоянного тока входят в стандартную комплектацию промышленного оборудования благодаря двум уникальным характеристикам. Эти двигатели могут запускаться, реверсироваться или останавливаться по требованию, что очень важно для производства. Они также поддерживают контроль скорости, что является еще одним необходимым условием для точной работы станка.
Что такое управление скоростью двигателя постоянного тока?
Для многих применений требуется регулировка скорости двигателя постоянного тока, что обеспечивает максимальную функциональность и производительность машины. Делать это преднамеренно и по мере необходимости требует контроля скорости. Операторы могут делать это вручную или полагаться на автоматизированные технологические устройства. Управление скоростью двигателя постоянного тока отличается от регулирования скорости, которое поддерживает постоянную скорость, несмотря на колебания нагрузки.
Регуляторы скорости бывают двух основных видов — управление якорем и управление полем. Изменения напряжения на клеммах или воздействия внешнего сопротивления выполняют функцию управления якорем. И наоборот, изменение магнитного потока является методом управления полем.
Принцип работы двигателя постоянного тока
Работа двигателей постоянного тока основана на нескольких законах электричества. Закон Фарадея об электромагнетизме гласит, что проводник с током подвергается механической силе при встрече с магнитным полем. «Правило левой руки» Флеминга гласит, что движение проводника всегда перпендикулярно магнитному полю и току.
По закону Ленца возникающее электромагнитное поле (ЭДС) сопротивляется напряжению, создавая явление, называемое обратной ЭДС. Эта обратная ЭДС придает двигателям постоянного тока уникальную способность балансировать крутящий момент при различных нагрузках.
Управление якорем для двигателей постоянного тока
При управлении якорем напряжение изменяется несколькими способами. Один из способов — реализовать сопротивление якоря, которое включает последовательное подключение переменного сопротивления к цепи якоря. Как только сопротивление увеличивается, ток, протекающий через цепь, уменьшается, а падение напряжения на якоре становится меньше, чем напряжение в сети. Это, в свою очередь, снижает скорость двигателя пропорционально приложенному напряжению. Метод управления сопротивлением якоря используется в приложениях, требующих изменения скорости двигателя в течение более коротких периодов времени, а не непрерывно. Другими методами управления якорем являются контроль напряжения якоря и контроль сопротивления шунта.
Как рассчитывается скорость двигателя постоянного тока?
Чтобы определить скорость двигателя постоянного тока, вам нужно чистое напряжение — напряжение питания плюс противо-ЭДС. Из этого числа вычтите ток якоря, умноженный на сопротивление якоря. Разделите этот результат на магнитный поток на полюс, чтобы найти скорость двигателя постоянного тока.
Преимущества двигателей постоянного тока с управлением якорем
Управление якорем представляет собой систему с замкнутым контуром, тогда как управление полем представляет собой систему с разомкнутым контуром. Замкнутые системы часто являются предпочтительным выбором для операторов и бизнес-лидеров, которые ищут стабильность и удобство автоматизированного процесса. Двигатели, управляемые якорем, обеспечивают почти непревзойденную точность и управляемость, а также широкий диапазон изменения скорости.
Дополнительные преимущества двигателей постоянного тока с управлением якорем включают:
- Постоянный ток возбуждения и крутящий момент: При использовании метода управления якорем уровни тока возбуждения и крутящего момента остаются постоянными на протяжении всего применения. Независимо от скорости двигателя, вы можете положиться на эти факторы.
- Быстрое и простое изменение скорости: Двигатели постоянного тока с управлением якорем известны своей исключительной регулировкой скорости, которая позволяет операторам изменять скорость по мере необходимости в обоих направлениях.
Недостатки двигателей постоянного тока с управлением якорем
Хотя двигатели с управлением якорем быстродействующие и идеально подходят для кратковременных фиксированных процессов, у них есть несколько недостатков, которые следует учитывать при сравнении управления якорем с управлением полем:
- Более высокие первоначальные затраты: Метод управления якорем часто дороже, чем метод управления полем.
- Низкая энергоэффективность: Одна из причин, по которой управление якорем чаще всего используется в течение более коротких промежутков времени, заключается в том, что при изменении скорости теряется большое количество энергии. Эта потеря мощности делает процесс менее энергоэффективным и более дорогостоящим в целом.
Метод управления полем
При использовании метода управления полем для двигателей постоянного тока поле ослабляется для увеличения скорости или может быть усилено для снижения скорости двигателя. Достижение скоростей, превышающих номинальную скорость, может быть достигнуто за счет включения переменного сопротивления последовательно цепи возбуждения, изменения сопротивления магнитной цепи или изменения приложенного напряжения двигателя к цепи возбуждения (при подаче постоянного напряжения на цепь возбуждения). цепь якоря).
Преимущества двигателей постоянного тока с управлением от поля
В качестве системы с разомкнутым контуром метод управления полем идеально подходит для операторов, которым требуется экономичность, плавность работы и стабильная производительность. Двигатели постоянного тока с полевым управлением чаще используются для более длительных процессов из-за их надежности и удобства. В отличие от двигателей, управляемых якорем, управление полем обеспечивает скорость, превышающую нормальный диапазон.
К основным преимуществам этого метода относятся:
- Снижение затрат: Метод управления полем — это очень экономичная форма управления двигателем. Он прост в использовании и управлении, а более низкие эксплуатационные расходы делают его рентабельным в долгосрочной перспективе. Для производителей или инженеров с ограниченным бюджетом это идеальное решение.
- Минимальные потери мощности: Скорость двигателя постоянного тока, управляемого полем, изменяется за счет магнитного поля, а не якоря. В результате этот метод обычно тратит меньше энергии. Дополнительная энергоэффективность может сэкономить время и деньги, помогая окружающей среде.
Недостатки двигателей постоянного тока с полевым управлением
Электродвигатели постоянного тока с полевым управлением просты и удобны, что делает их популярным выбором для операторов двигателей и производителей. С другой стороны, есть определенные случаи, когда другой метод управления двигателем может быть более эффективным. К недостаткам полевого контроля относятся:
- Ограничения по скорости: Если ваше приложение требует, чтобы вы отрегулировали скорость двигателя ниже нормальной, возможно, вам лучше выбрать метод управления якорем. Двигатели постоянного тока с полевым управлением могут работать только со скоростью, превышающей нормальную. Более высокие скорости также могут привести к меньшему крутящему моменту.
- Пониженная устойчивость: Метод управления полем позволяет операторам получать более высокие скорости, чем обычно. Тем не менее, его общий диапазон может быть снижен из-за отсутствия стабильности. С более слабым полем вы сможете безопасно превысить только определенные скорости.
Сравните несколько приводов постоянного тока, чтобы найти тот, который обеспечит эффективное и экономичное управление вашим двигателем постоянного тока. Приводы постоянного тока имеют специальные функции и возможности для удовлетворения различных потребностей. Приводы постоянного тока могут быть регенеративными или нерегенеративными, с различной мощностью, конструкциями крепления и т. д.
Руководство по применению систем управления
Другие типы управления скоростью
Существуют различные способы управления скоростью двигателей в зависимости от конфигурации двигателя. Вот некоторые типичные для серийных двигателей:
- Метод контроля сопротивления якоря: Этот подход требует контроля сопротивления в соединении с источником питания. Чаще всего снижают скорость при небольших нагрузках.
- Управление шунтирующим якорем: В рамках этой технологии используется реостат, который изменяет подачу напряжения.
- Контроль напряжения на клеммах якоря: Этот метод основан на отдельном источнике напряжения с регулируемым входом.
- Метод полевого дивертора: При таком подходе вы уменьшаете поток поля за счет шунтирования вокруг серии, чтобы снизить сопротивление и увеличить скорость. В результате вы получаете более высокую, чем обычно, скорость, которая увеличивается по мере уменьшения нагрузки.
- Управление полем с ответвлениями: Вы повышаете скорость, уменьшая количество витков обмотки возбуждения с помощью наружного ответвления.
Методы регулирования скорости параллельных двигателей аналогичны. Для управления через якорь можно использовать регуляторы сопротивления или напряжения. При подходе управления полем в большинстве отраслей промышленности используются реостаты для уменьшения сопротивления вне нагрузки.
Свяжитесь с командой Carotron для получения помощи сегодня
У вас есть вопрос или вы не уверены, что вам нужно? Мы можем помочь! Свяжитесь с представителем заказчика или инженером Carotron, Inc. по телефону 1-888-286-8614, и мы рассмотрим вашу заявку и предложим подходящие компоненты для выполнения работы. Вы также можете связаться с нами онлайн, используя нашу форму.
Электродвигатели переменного и постоянного тока: отличия и преимущества
Автор: Брэдли | Оставить комментарий
Электродвигатели играют важную роль почти во всех отраслях промышленности. Использование правильного типа двигателя с высококачественными деталями и регулярное техническое обслуживание обеспечивают бесперебойную работу вашего объекта и предотвращают повреждение конечного оборудования из-за износа или скачков напряжения.
Gainesville Industrial Electric может помочь вашей компании выбрать правильные промышленные электродвигатели и запчасти для ваших приложений.
A Учебник по электродвигателям
Электродвигатели — это машины, которые преобразуют электрическую энергию — накопленную энергию или прямое электрическое соединение — в механическую энергию за счет создания вращательного усилия. Два основных типа электродвигателей :
- Двигатели переменного тока , которые питаются от переменного тока
- Двигатели постоянного тока , которые питаются от постоянного тока
Принцип работы электродвигателей
Как двигатели переменного, так и постоянного тока используют электрический ток для создания вращающихся магнитных полей, которые, в свою очередь, создают вращательную механическую силу в якоре, расположенном на роторе или статоре, вокруг вала. В различных конструкциях двигателей используется одна и та же базовая концепция для преобразования электрической энергии в мощные импульсы силы и обеспечения динамических уровней скорости или мощности.
Основные компоненты двигателя
Хотя электродвигатели могут отличаться от одной конструкции или типа к другой, многие из них содержат эти Детали и узлы (расположены от центра наружу):
- Центральный вал двигателя
- Обмотки
- Подшипники (для уменьшения трения и износа)
- Якорь (расположенный на роторе, вращающаяся часть, или на статоре, неподвижная часть)
- Щетки (в двигателях постоянного тока)
- Клеммы
- Рама и торцевые щиты
Типы электродвигателей: двигатели переменного и постоянного тока
Двигатели переменного и постоянного тока представляют собой широкие категории двигателей, которые включают в себя более мелкие подтипы. Асинхронные двигатели, линейные двигатели и синхронные двигатели, например, все типы двигателей переменного тока. Двигатели переменного тока также могут включать частотно-регулируемые приводы для управления скоростью и крутящим моментом двигателя, а двигатели постоянного тока доступны в моделях с самовозбуждением и с независимым возбуждением.
Преобразователь частоты переменного тока
Преимущества двигателя переменного тока по сравнению с двигателем постоянного тока
Каждый тип двигателя имеет различные преимущества, которые делают их наиболее подходящими для различных коммерческих и промышленных применений. Например, двигатели переменного тока универсальны и просты в управлении. Некоторые из их других преимуществ включают в себя:
- Низкое начальное энергопотребление, которое также защищает компоненты на принимающей стороне
- Управляемые уровни пускового тока и ускорения
- Дополнения VFD или VSD, которые могут контролировать скорость и крутящий момент на разных этапах использования
- Высокая прочность и увеличенный срок службы
- Возможности для многофазных конфигураций
Двигатели постоянного тока также обладают собственными преимуществами , такими как:
- Более простая установка и обслуживание
- Высокая пусковая мощность и крутящий момент
- Быстрое время отклика на запуск, остановку и ускорение
- Наличие нескольких стандартных напряжений
Какой двигатель мощнее: переменного или постоянного тока?
Двигатели переменного тока обычно считаются более мощными, чем двигатели постоянного тока, поскольку они могут генерировать более высокий крутящий момент за счет более мощного тока. Однако двигатели постоянного тока обычно более эффективны и лучше используют входную энергию. Двигатели как переменного, так и постоянного тока бывают разных размеров и мощностей, которые могут удовлетворить требования к мощности в любой отрасли.
Применение двигателей переменного и постоянного тока
Двигатели переменного и постоянного тока находят применение в технологических процессах и установках почти во всех отраслях промышленности. Одни из самых распространенных промышленное применение двигателей переменного тока включает:
- Бытовые приборы
- Приводы и системы компрессоров
- Компьютеры
- Конвейерные системы
- Вентиляторы и кондиционеры
- Гидравлические и ирригационные насосы
- Транспортное оборудование
Общие промышленные применения для двигателей постоянного тока включают:
- Производство и производство
- Машины, требующие постоянной мощности, такие как пылесосы, лифты и швейные машины
- Складское сортировочное оборудование
Выбор подходящего электродвигателя для вашего промышленного применения
Установка и техническое обслуживание подходящих двигателей на объектах и оборудовании вашей компании является важным шагом к обеспечению бесперебойной работы и производства.
Gainesville Industrial Electric продает и обслуживает двигатели переменного и постоянного тока, запчасти и многое другое. Мы также являемся авторизованным заводским гарантийным центром. Чтобы получить помощь в выборе подходящего электродвигателя или промышленной сборки для вашего применения, свяжитесь с нами или запросите дополнительную информацию сегодня, чтобы получить предложение.
Связанный контент:
- Наш каталог электродвигателей
Руководство по электродвигателям
Ищи:
Последние сообщения
- Двигатели для дробилок | Камнедробилка — особенности и области применения
- Приводы переменного тока 101: что это такое, области применения, преимущества
- Промышленные редукторы 101 | Типы и области применения
- Взрывозащищенные двигатели • Руководство по выбору
- Однофазные и трехфазные двигатели: руководство по выбору
Архивы
- август 2022
- июль 2022
- март 2022
- Февраль 2022
- Апрель 2021
Категории
- Блог
- Без категории
В чем основное различие между двигателем переменного и постоянного тока?
Электрическая машина — это устройство, которое преобразует механическую энергию в электрическую и наоборот. Двигатель — это тип электрической машины, которая преобразует электрическую энергию в механическую. Эти двигатели могут работать как от электрической энергии переменного тока, так и от электрической энергии постоянного тока. Поэтому двигатели делятся на два основных типа; Двигатель переменного тока и двигатель постоянного тока.
Оба типа двигателей генерируют механическую энергию, используемую для перемещения любой механической нагрузки и т. д., но их конструкция, управление, эффективность и области применения сильно различаются. Вы можете узнать больше об основной информации о переменном и постоянном токе и напряжении в предыдущем посте.
- Связанный пост: Разница между генератором переменного тока и генератором в сравнении
Прежде чем перейти к списку различий между двигателями переменного и постоянного тока, давайте обсудим, как работает двигатель, и основы работы двигателя переменного и постоянного тока.
Что такое двигатель переменного тока?
Это тип электрической машины, которая преобразует электрическую энергию переменного тока в механическую энергию.
Существует два типа двигателей переменного тока; Асинхронный (асинхронный) двигатель и синхронный двигатель
В асинхронном или асинхронном двигателе статор состоит из нескольких обмоток, а ротор (с короткозамкнутым ротором или обмоткой) состоит из замкнутых контуров проводников. Переменный ток подается на статор, который создает переменный поток, называемый вращательным магнитным полем .
Этот магнитный поток создает индукционный ток в роторе в соответствии с законом индукции Фарадея. Индуцированный ток противодействует магнитному полю и начинает вращаться в его направлении. Таким образом, асинхронный двигатель, однофазный или трехфазный, работает по принципу электромагнитная индукция между статором и ротором.
В синхронном двигателе отдельный постоянный ток подается на ротор через контактные кольца для создания собственного магнитного поля или используется постоянный магнит. Вход переменного тока подается на статор для создания вращательного магнитного поля.
Магнитное поле ротора блокируется магнитным полем вращения статора и начинает вращаться с той же скоростью. Поскольку вращающееся магнитное поле зависит от частоты переменного тока питания, скорость двигателя зависит только от входной частоты. Поэтому он называется синхронным двигателем.
Поскольку вход всегда применяется к статору, угольные щетки не используются. Таким образом, они более надежны и требуют меньше обслуживания. Они более эффективны, чем двигатели постоянного тока, в плане выработки большей механической мощности.
Но управлять скоростью двигателя переменного тока немного сложнее, чем двигателя постоянного тока. Поскольку это в основном зависит от входной частоты, мы используем устройство под названием VFD (преобразователь частоты) для изменения входной частоты питания двигателя. Их также называют приводами переменного тока. Их направление регулируется изменением полярности только пусковой обмотки.
- Связанная запись: Разница между генератором переменного и постоянного тока
Что такое двигатель постоянного тока?
Это тип электрической машины, которая преобразует электрическую энергию постоянного тока в механическую энергию.
Основной принцип , по которому работает двигатель постоянного тока , заключается в том, что «когда проводник с током помещается в магнитное поле, на него действует механическая сила, взаимно перпендикулярная магнитному полю и направлению тока». Направление силы определяется Правило левой руки Флеминга .
Якорь двигателя постоянного тока состоит из многожильных обмоток. Он размещен внутри корпуса, выполненного для постоянного магнита, создающего магнитное поле. Якорь несет постоянный ток , питаемый от любого источника постоянного тока, например аккумуляторов. Магнитное поле взаимодействует с токоведущими проводниками якоря. Таким образом, на якорь действует механическая сила.
Поскольку вход применяется к движущаяся часть (ротор) двигателя постоянного тока, мы используем угольные щетки и коммутатор для подачи переменного тока на якорь. Поэтому они называются Коллекторный двигатель постоянного тока . Щетки и коллектор со временем изнашиваются, поэтому требуют частого обслуживания. Искры между коммутатором также снижают его эффективность и создают шум.
В бесщеточном двигателе постоянного тока (BLDC) статор состоит из нескольких катушек, которые окружают якорь ротора из постоянных магнитов. Постоянный ток преобразуется в трехфазный переменный ток с помощью тиристоров и подается на катушки статора для создания вращающегося магнитного поля. В таких двигателях вход подается на неподвижную часть, поэтому для него не требуются щетки или коммутатор. Это помогает повысить производительность двигателя, а также его эффективность. Вы также можете узнать больше о шаговых двигателях и серводвигателях в предыдущих постах с подробностями.
Таким образом, в двигателе постоянного тока вход может быть применен к ротору (в щеточном двигателе постоянного тока) и статору (в двигателе постоянного тока BLDC).
Скорость двигателя постоянного тока можно легко контролировать, изменяя входное напряжение. Одним из простых методов управления входным напряжением является ШИМ (широтно-импульсная модуляция). Направление двигателя постоянного тока изменяется при изменении полярности входного источника постоянного тока. Вы также можете прочитать о расчете сечения кабеля для двигателей LT и HT.
- Связанный пост: Разница между трансформатором и асинхронным двигателем
Ключевые различия между двигателями переменного и постоянного тока
| Двигатель переменного тока | Двигатель постоянного тока |
| Электрическая машина, преобразующая электрическую энергию переменного тока в механическую энергию. | Электрическая машина, которая преобразует электрическую энергию постоянного тока в механическую энергию. |
| Питается от переменного тока (AC). | Питается от однонаправленного постоянного тока (DC). |
| Существует два основных типа двигателей переменного тока; Асинхронный (асинхронный) двигатель и Синхронный двигатель . | Существует два основных типа двигателей постоянного тока; Коллекторный двигатель постоянного тока и Бесщеточный двигатель постоянного тока (BLDC) . |
| Двигатели переменного тока могут быть однофазными (фаза и нейтраль в качестве входа) или трехфазными (3 линии проводов под напряжением в качестве входа). | Двигатели постоянного тока являются однофазными и имеют две входные линии (положительную и отрицательную). |
| Входное питание якоря — переменный ток, поэтому не требует коммутации. | Входной источник постоянного тока, поэтому требуется коммутация постоянного тока в переменный. |
| Якорь всегда неподвижен, известный как статор . | Якорь в щеточном двигателе постоянного тока вращается, также известный как .ротор . |
| Вход подается на статор, поэтому нет необходимости в угольных щетках. | Вход подается на ротор, поэтому ему нужны угольные щетки и коллектор. |
| Не шумит и работает плавно. | Щетки скользят по якорю , создавая шум и искры . |
| Обеспечивает повышенную выходную мощность . | Предлагает широкий выбор из управление скоростью . |
| Источники питания могут быть однофазными, или трехфазными. | Источником питания является источник постоянного тока, такой как аккумуляторы , элементы и солнечные панели и т. д. |
| В качестве источника питания используется сеть переменного тока . | Использует накопленную резервную мощность от батарей. |
| Направление можно изменить, изменив полярность пусковой обмотки в одну фазу и поменять местами любые две клеммы в 3-фазном двигателе. | Его направление можно легко изменить, изменив полярность входа постоянного тока . |
| Его скорость регулируется изменением входной частоты . Он использует VFD для управления их скоростью. | Скорость регулируется изменением тока якоря . Управлять извне проще через ШИМ. |
| Требует меньше обслуживания и является экономически эффективным. | Требует частого и дорогостоящего обслуживания . таким образом, они дороже, чем AC. |
| Магнитное поле вращается на , когда якорь неподвижен. | Магнитное поле неподвижно , пока якорь вращается. |
| Крутящий момент уменьшается с увеличением скорости. | Обеспечивает постоянный крутящий момент в широком диапазоне скоростей. |
| Двигатель переменного тока имеет относительно низкий КПД из-за потерь индукционного тока. | Двигатель постоянного тока имеет высокий КПД , поскольку магнитное поле создается постоянным магнитом. |
| Не все двигатели переменного тока являются самозапускающимися и требуют внешнего оборудования для запуска. | Все двигатели постоянного тока являются самозапускающимися двигателями . |
| Асинхронный двигатель переменного тока является наиболее часто используемым электродвигателем в бытовом и промышленном секторах, например, в сверлильных станках, водяных насосах, вентиляторах, стиральных машинах, воздуходувках и т. д. | Используется в приложениях, требующих точного контроля положения и высокого крутящего момента, таких как подъемники, краны, конвейерные ленты и т. д., а также небольшие двигатели во встроенной электронике, маленькие игрушки. |
Вывод этой статьи состоит в том, что двигатели переменного тока используются из-за их наилучшей выходной мощности, надежности и необходимости меньшего обслуживания. В то время как двигатель постоянного тока используется из-за их более легкого управления скоростью и направлением. Но их частое обслуживание обходится очень дорого. В целом, использование частотно-регулируемого привода с двигателем переменного тока может обеспечить менее дорогое решение проблемы.
Если мы говорим о , основное различие между двигателем постоянного и переменного тока заключается в коммутаторе, и можно легко отличить и определить, является ли это двигателем переменного тока или двигателем постоянного тока. Короче говоря, если в двигателе есть коммутатор, это двигатель постоянного тока, в противном случае это двигатель переменного тока.