Содержание
Электронно-коммутируемый бесщеточный двигатель постоянного тока Maxon motor EC45 136207
Двигатель серии ЕС Maxon motor– это бесщеточный электродвигатель
постоянного тока с магнитными сегментами в роторе и с интегрированной
электроникой коммутации.
Эти двигатели характеризуются главным образом
их выгодной механической характеристикой, высокой мощностью, чрезвычайно
широким диапазоном числа оборотов и конечно, их непревзойденным сроком службы.
Программа запаса:
— быстрые сроки поставки,
— в запасе в наших
офисах продаж во всем мире.
Версия двигателя:
— бесщеточный.
— IP54.
|
Характеристика двигателя
(значения при номинальном напряжении)
| |||
|
Номинальная мощность, Вт
|
250
| ||
|
Номинальное
|
24,0
| ||
|
Число оборотов без
|
5250
| ||
|
Сила тока без
|
435
| ||
|
Номинальное число
|
4520
| ||
|
Номинальный крутящий
(макс.
|
310
| ||
|
Номинальная сила тока
(макс. продолжительная
|
7,47
| ||
|
Момент при
|
2420
| ||
|
Начальная сила тока, А
|
55,8
| ||
|
Макс. КПД, %
|
84
| ||
|
Предельное
|
0,430
| ||
|
Предельная
|
0,170
| ||
|
Моментный коэффициент,
|
43,3
| ||
|
Коэффициент числа
|
221
| ||
|
Градиент числа
|
2,19
| ||
|
Механическая
|
4,80
| ||
|
Момент инерции ротора,
|
209
| ||
|
Термические данные
| |||
|
Термическое
|
1,7
| ||
|
Термическое
|
1,1
| ||
|
Тепловая постоянная
|
30,8
| ||
|
Тепловая постоянная
|
1570
| ||
|
Окружающая
|
-20…+100
| ||
|
Макс.
|
+125
| ||
|
Механические данные (шарикоподшипники с
| |||
|
Макс. допускаемое
|
12000
| ||
|
Осевой зазор при
|
<20Н=0
>20Н=max0,14
| ||
|
Радиальный зазор, мм
|
с натягом
| ||
|
Макс. осевая нагрузка
|
20
| ||
|
Макс. сила для
|
182
| ||
|
Макс.
|
180
| ||
|
Другие данные
| |||
|
Число полюсных пар
|
1
| ||
|
Число фаз
|
3
| ||
|
Масса двигателя, г
|
1150
| ||
 допускаемая температура
допускаемая температура
 радиальная
радиальная
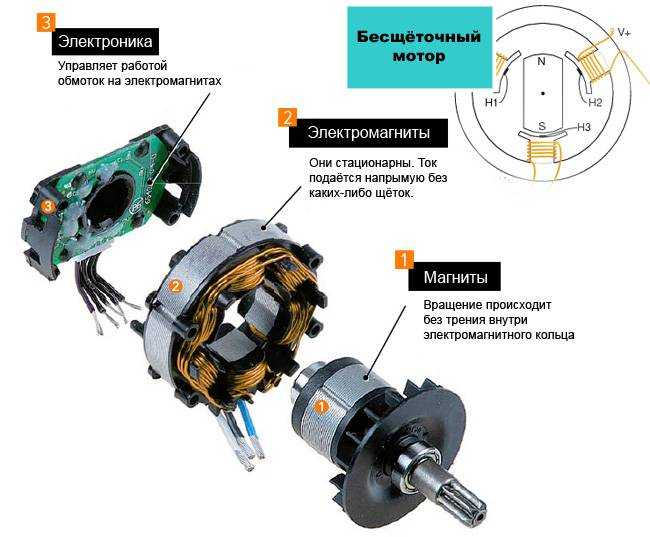
Что такое бесколлекторный двигатель постоянного тока, как он устроен и работает
Главная проблема коллекторных двигателей – это как раз-таки наличие коллекторного узла. Щётки стираются, а ламели изнашиваются, от слоя графитовой пыли между ними происходят замыкания, возникает искрение. Этих проблем нет в асинхронных машинах, но работать от постоянного тока они не могут. Бесколлекторный двигатель постоянного тока лишен обозначенных выше недостатков. О том, что это такое, как работает и где используются двигатели БДПТ мы и поговорим в этой статье.
Бесколлекторный двигатель постоянного тока лишен обозначенных выше недостатков. О том, что это такое, как работает и где используются двигатели БДПТ мы и поговорим в этой статье.
- Определение
- Устройство и принцип действия
- Виды БДПТ
- Схема подключения
- Где применяются бесколлекторные двигатели
- Преимущества и недостатки
Определение
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
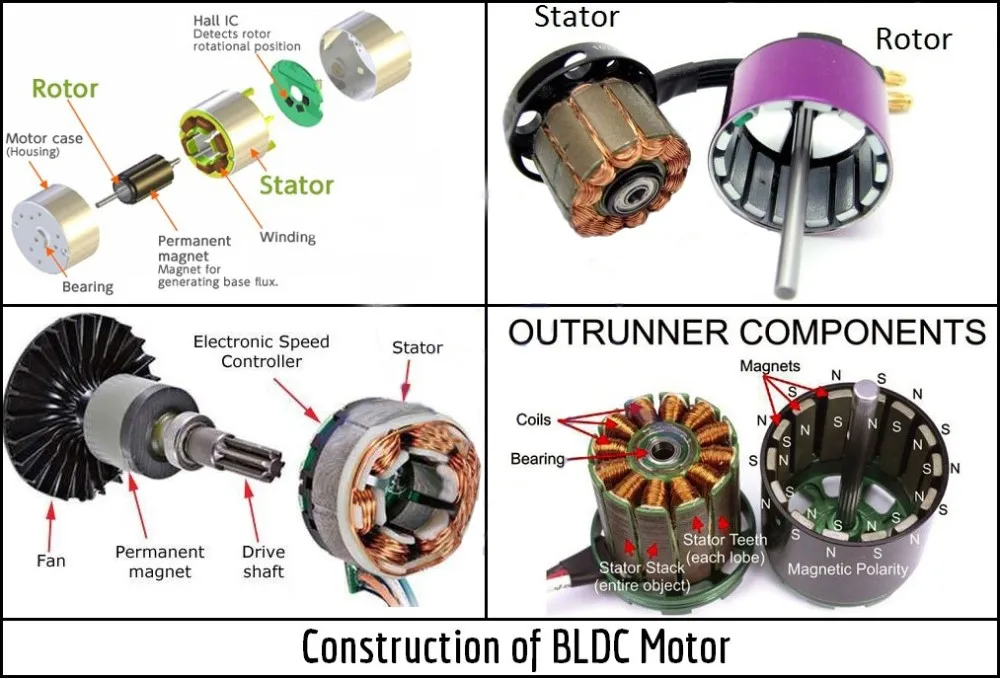
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Виды БДПТ
Теперь давайте разберемся, какими бывают бесколлекторные двигатели на постоянных магнитах. Их классифицируют по форме противо-ЭДС, конструкции, а также по наличию датчиков положения ротора. Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
- BLDC — в них трапецеидальная противо-ЭДС;
- PMSM — противо-ЭДС синусоидальная.
В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
А по конструкции бесколлекторные двигатели постоянного тока бывают:
- С внутренним ротором. Это более привычное представление электродвигателя, когда статор — это корпус, а вращается вал, расположенный в нём. Часто их называют английским словом «Inrunner». Такой вариант обычно применяют для высокооборотистых электродвигателей
- С внешним ротором. Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.
Выбирают конструкцию в зависимости от того для чего нужен бесколлекторный двигатель в конкретном применении.
Современная промышленность выпускает бесколлекторные двигатели как с датчиками положения ротора, так и без них. Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Основные характеристики бесколлекторных двигателей постоянного тока:
- Режим работы — длительный или кратковременный.
- Максимальное рабочее напряжение.
- Максимальный рабочий ток.
- Максимальная мощность.
- Максимальные обороты, часто указывают не обороты, а KV — об/в, то есть количество оборотов на 1 вольт приложенного напряжения (без нагрузки на валу). Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение.
- Сопротивление обмотки (чем оно меньше, тем выше КПД), обычно составляет сотые и тысячные доли Ома.
- Угол опережения фазы (timing) — время, через которое ток в обмотке достигнет своего максимума, это связано с её индуктивностью и законами коммутации (ток в индуктивности не может измениться мгновенно.
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности.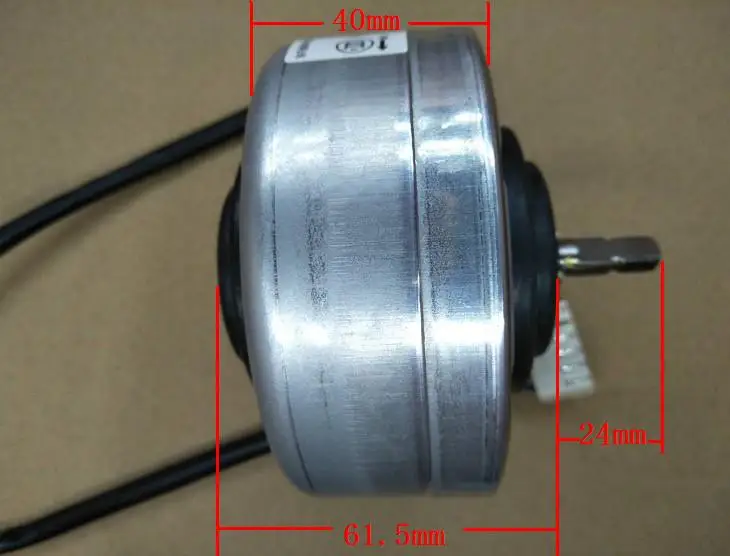 Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.
В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
 com/embed/5-jC5mdcLUs» allowfullscreen=»allowfullscreen»>
com/embed/5-jC5mdcLUs» allowfullscreen=»allowfullscreen»>
Кстати схему из видео для повторения также прикладываем:
Где применяются бесколлекторные двигатели
Сфера применения таких электродвигателей досрочно широка. Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Широкое применение БДПТ нашли в электротранспорте, почти все современные мотор-колеса электросамокатов, велосипедов, мотоциклов и автомобилей — это бесколлекторные двигатели. К слову, номинальное напряжение электродвигателей для транспорта лежит в широком пределе, например, мотор-колесо для велосипеда зачастую работает от 36В или от 48В, за редким исключением и больше, а в автомобилях, например, на Toyota Prius порядка 120В, а на Nissan Leaf – доходит до 400, при том что заряжается от сети 220В (это реализуется с помощью встроенного преобразователя).
На самом деле область применения бесколлекторных электродвигателей очень обширна, отсутствие коллекторного узла позволяет его применять опасных местах, а также в местах с повышенной влажностью, без опасений замыканий, искрения или возгорания из-за дефектов в щеточном узле. Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Преимущества и недостатки
Бесколлекторным двигателям постоянного тока, как и другим видам электромашин, присущи определенные достоинства и недостатки.
Преимущества у БДПТ заключаются в следующем:
- Благодаря возбуждению мощными постоянными магнитами (неодимовыми, например) превосходят по моменту и мощности и имеют меньшие габариты, чем асинхронные двигатели. Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.
- Нет искрящего щеточно-коллекторного узла, который требует регулярного обслуживания.
- При использовании качественного контроллера в отличие от того же КД не выдают помехи в питающую сеть, что особенно важно в радиоуправляемых устройствах и транспорте с развитым электронным оборудованием в бортовой сети.

- КПД более 80, чаще и 90%.
- Высокая скорость вращения, в отдельных случаях до 100000 об/мин.

Но есть и существенный минус: бесколлекторный двигатель без контроллера — просто кусок железа с медной обмоткой. Он никак не сможет работать. Контроллеры стоят недешево и чаще всего их приходится заказывать в интернет-магазинах или с алиэкспресс. Из-за этого использовать БК-моторы в моделях и устройствах домашнего производства не всегда возможно.
Теперь вы знаете, что такое бесколлекторный двигатель постоянного тока, как он работает и где применяется. Надеемся, наша статья помогла вам разобраться во всех вопросах!
Материалы по теме:
- Что такое ротор и статор
- Как собрать простейший электродвигатель в домашних условиях
- Отличие постоянного тока от переменного
Опубликовано 17.06.2019 Обновлено 05.07.2019 Пользователем Александр (администратор)
Китай Бесщеточный электродвигатель постоянного тока
MAINTEX BL6208-01 Бесщеточный двигатель для очистителей воздуха — это разновидность бесщеточного двигателя постоянного тока.
Бесщеточный двигатель постоянного тока состоит из корпуса двигателя и привода и является типичным мехатронным продуктом. Драйвер состоит из силовой электроники и интегральных схем, и его функции: получение сигналов запуска, останова и торможения двигателя для управления запуском, остановкой и торможением двигателя; прием сигналов датчика положения и сигналов прямого и обратного направления для управления обратным ходом. Силовые мосты переменных мостов включаются и выключаются для создания постоянного крутящего момента; команда скорости и сигнал обратной связи скорости принимаются для управления и регулировки скорости; обеспечивают защиту и отображение и т. д.
MAINTEX BL6208-01 Бесщеточный двигатель для очистителей воздуха Параметры
|
MODEL |
ITEMS |
SPEC |
|
BL6208-01 for Air Purifiers |
Driving Voltage |
24VDC |
|
Voltage Range |
22.  8~25.2VDC 8~25.2VDC
| |
|
Peak current |
2A | |
|
No-load Speed |
2600±10%rpm | |
|
Rated Speed |
2600±10%rpm | |
|
Speed Range |
500~2600rpm | |
|
Rated Torque |
0.081N·m | |
|
Phase number |
3 phases | |
|
Number of Poles |
10 poles | |
|
Direction of Rotation |
CCW | |
|
Weight |
0.286kg | |
|
Diameter |
61.  4mm 4mm
| |
|
Length |
63.6mm |
Чертеж бесколлекторного двигателя MAINTEX BL6208-01 для очистителей воздуха
Применение бесщеточного двигателя MAINTEX BL6208-01 для очистителей воздуха
• Дрон
• Беговая дорожка
• Пистолеты для фасции
• электрические массажеры
• Кондиционеры
• Робот-пылесос
• Диваны с регулируемой спинкой
• Соковыжималка
• Посудомоечные машины
• Стиральные машины
• Поклонник
• Мелкая бытовая техника
• Цепные пилы
• Триммеры
• Воздуходувки
• Хедж-триммер
• Газонокосилки
• Секаторы
• шейкер для оливок
• Секатор для столбов
• Бетонорез
• Металлический милый
• Циркулярная пила
• Угловая шлифовальная машина
• Составные части
• Снегоочиститель
• Мульчер
• Газонокосилка
• Газонокосилка
• Электрическая цепная пила
• Роботы
OEM сервис
【Промышленная энциклопедия】
История развития бесщеточных двигателей постоянного тока
Для широкой публики это относительно новый тип двигателя, который в последние годы стал постепенно применяться в повседневной жизни. Фактически, еще в 1917 году родилась основная идея бесщеточных двигателей постоянного тока, потому что характеристики механических щеток, которые легко изнашиваются, являются фатальным недостатком щеточных двигателей постоянного тока, который влияет на общее применение щеточных двигателей в полевых условиях. Людям нужен двигатель, который можно использовать в течение длительного времени без обслуживания, чтобы заменить его. В то время Бойгер предложил идею замены механических щеток щеточных двигателей постоянного тока выпрямителями, но только в 1955 г. Харрисон и другие подали заявку на первый патент на замену механических щеток щеточного двигателя постоянного тока транзисторной схемой коммутации, что официально ознаменовало рождение современных бесщеточных двигателей постоянного тока.
Фактически, еще в 1917 году родилась основная идея бесщеточных двигателей постоянного тока, потому что характеристики механических щеток, которые легко изнашиваются, являются фатальным недостатком щеточных двигателей постоянного тока, который влияет на общее применение щеточных двигателей в полевых условиях. Людям нужен двигатель, который можно использовать в течение длительного времени без обслуживания, чтобы заменить его. В то время Бойгер предложил идею замены механических щеток щеточных двигателей постоянного тока выпрямителями, но только в 1955 г. Харрисон и другие подали заявку на первый патент на замену механических щеток щеточного двигателя постоянного тока транзисторной схемой коммутации, что официально ознаменовало рождение современных бесщеточных двигателей постоянного тока.
С появлением классического бесщеточного двигателя постоянного тока Mac и его драйвера в 1978 году, а также с разработкой бесщеточных двигателей постоянного тока с прямоугольной волной и бесщеточных двигателей постоянного тока с синусоидальной волной в 1980-х годах, бесщеточные двигатели постоянного тока действительно начали входить в практическую стадию и были быстро развивался.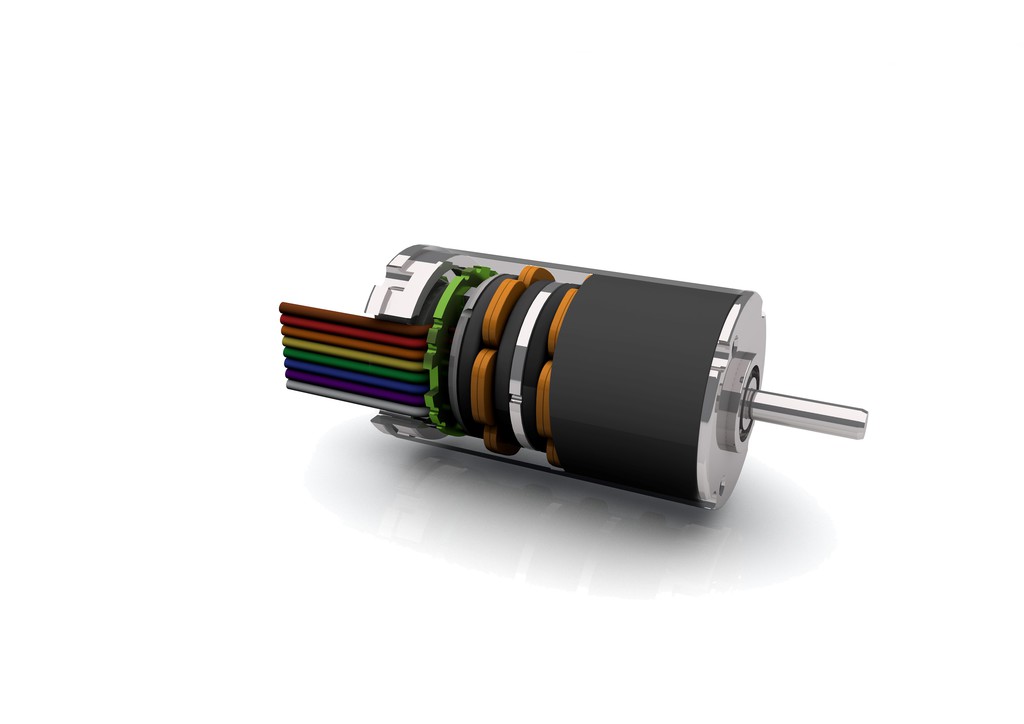 В настоящее время бесщеточные двигатели постоянного тока полностью разработаны на международном уровне. В некоторых более развитых странах они станут доминирующими двигателями в ближайшие несколько лет и постепенно вытеснят другие типы двигателей. В Китае общий уровень бесщеточных двигателей все еще ниже, чем международный уровень. Одна из причин заключается в том, что исследования и разработки в Китае начались в начале 1970-х годов, по крайней мере на полвека позже, чем международное развитие, а уровень исследований не так хорош, как в других развитых странах; другая основная причина заключается в том, что исследовательская работа в нашей стране в основном сосредоточена в некоторых научно-исследовательских учреждениях и высших учебных заведениях, а степень интеграции с практикой все еще относительно низкая, особенно производственные технологии и технологическое оборудование далеко отстают от международных стандартов, который сейчас примерно соответствует международным стандартам конца 1970-х и 1980-х годов.
В настоящее время бесщеточные двигатели постоянного тока полностью разработаны на международном уровне. В некоторых более развитых странах они станут доминирующими двигателями в ближайшие несколько лет и постепенно вытеснят другие типы двигателей. В Китае общий уровень бесщеточных двигателей все еще ниже, чем международный уровень. Одна из причин заключается в том, что исследования и разработки в Китае начались в начале 1970-х годов, по крайней мере на полвека позже, чем международное развитие, а уровень исследований не так хорош, как в других развитых странах; другая основная причина заключается в том, что исследовательская работа в нашей стране в основном сосредоточена в некоторых научно-исследовательских учреждениях и высших учебных заведениях, а степень интеграции с практикой все еще относительно низкая, особенно производственные технологии и технологическое оборудование далеко отстают от международных стандартов, который сейчас примерно соответствует международным стандартам конца 1970-х и 1980-х годов.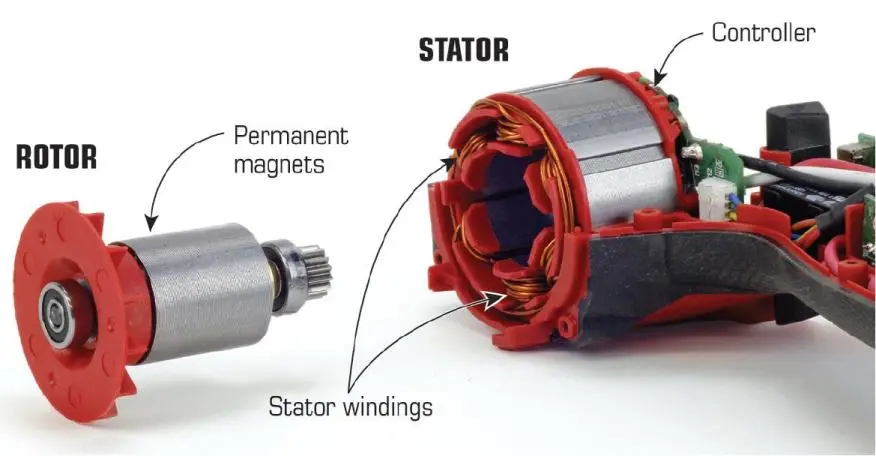 Уровень ранних лет.
Уровень ранних лет.
Наиболее критическая эпоха для применения и развития бесщеточных двигателей постоянного тока — последние 10 лет. По сравнению с щеточными двигателями постоянного тока высокая стоимость бесщеточных двигателей постоянного тока в основном вызвана увеличением количества электронных компонентов. В начале 1980-х годов соотношение цены корпуса двигателя и схемы коммутационного привода составляло примерно 1:10, а высокая стоимость ограничивала разработку бесщеточных двигателей постоянного тока. За последние десять лет, с быстрым развитием силовой электронной технологии и технологии интегрированного управления, электронные компоненты с превосходными и низкими характеристиками создали прекрасные условия для разработки бесщеточных двигателей постоянного тока; Соотношение цены корпуса двигателя и коммутационной схемы привода снижено до 1: 1 ~ 3, что создает предпосылки для массового продвижения применения бесщеточных двигателей постоянного тока.
шаговый двигатель BLDC двигатель шаговый двигатель步进电机 龙岗网站建设深圳сео自贡灯会净水器厂家自贡净水器泉州净水器珠海净水器天津净水器重庆净水器沈阳净水器杭州净水器汕头净水 器苏州 净水 器温州 净水 器宁波 净水 器昆山 净水 器
Типы бесщеточных двигателей: их применение —
В этой статье мы собираемся обсудить типы бесщеточных двигателей. Этот тип электродвигателя не имеет щеток. Щетки — это скользящие устройства, которые пропускают электричество в медную катушку двигателя.
Этот тип электродвигателя не имеет щеток. Щетки — это скользящие устройства, которые пропускают электричество в медную катушку двигателя.
Бесщеточные двигатели бывают многих типов. Конструктивно он бывает двух типов — рабочий или внутренний ротор или внешний и внешний ротор. Что касается сенсоров — сенсорные и бессенсорные. По количеству полюсов — однополюсные и многополюсные. По типу силового сигнала — синусоидальные и трапециевидные бесщеточные двигатели.
«Бесщеточный двигатель» by объяснять под лицензией CC BY-NC-SA 2.0
Объясните, что такое бесщеточный двигатель с внутренним и внешним ротором.
Внутренний ротор и внешний ротор являются классификациями бесщеточные двигатели постоянного тока на основе дизайна. Магнит, используемый в двигателе, является ротором, а обмотка — статором.
Магниты в BLDC помогают двигателю вращаться. Статор создает притягивающий или отталкивающий заряд по направлению к магниту, который раскручивает двигатель. Для BLDC внутреннего ротора ротор находится внутри, а статор — снаружи. Для внешнего ротора конструкция обратная, т.е. ротор снаружи, а статор внутри.
Для BLDC внутреннего ротора ротор находится внутри, а статор — снаружи. Для внешнего ротора конструкция обратная, т.е. ротор снаружи, а статор внутри.
Медведев, Обмотка статора двигателя BLDC, размер нет, под лицензией CC BY-SA 3.0
Объясните: сенсорные и бесщеточные двигатели без сенсоров.
Из названия ясно, что это подразделение бесщеточных двигателей постоянного тока происходит из-за наличия датчиков. Если BLDC имеет датчики внутри двигателя, то это датчик, в противном случае это BLDC без датчиков.
Двигатели BLDC с датчиками имеют датчики положения, которые передают данные о положении в контроллер и обеспечивают правильную синхронизацию схемы движения с положением ротора. Бессенсорный BLDC имеет магниты в роторе и на краю двигателя. Как обороты двигателя вверх он начинает производить электродвижущую энергию в катушках статора.
Подробнее…. Что такое взаимная индуктивность? | Все важные концепции и 10+ формул, которые вам нужно знать
Объясните одно- и многополюсные бесщеточные двигатели.
Полюс в Бесщеточные двигатели постоянного тока относится к числу полюсов постоянного магнита для ротора. Однополюсные двигатели BLDC представляют собой пару однополюсных бесщеточных двигателей. Многополюсные BLDC имеют до четырех пар полюсов.
Многополюсные двигатели BLDC имеют несколько пар полюсов, что обеспечивает плавное вращение, улучшенную производительность на более низких скоростях и повышенную долговечность. Однополюсный двигатель не может достичь этого. Типичный приложения для таких двигателей включают насосы и приложений управления технологическим процессом, где важна скорость.
Типы бесщеточных двигателей — часто задаваемые вопросы
Бесщеточные двигатели постоянного или переменного тока?
Бесщеточные двигатели или двигатели BLDC технически являются синхронными двигателями постоянного тока, но называются двигателями постоянного тока. Возникает очевидный вопрос: почему мы называем это DC и правильно ли? Что ж, это правильно, так как ток питания постоянный.
Двигатель BLDC имеет вал и вращающийся ротор. Значит, это должен быть переменный ток, поскольку магнитное поле должно изменяться, чтобы ротор вращался. Если мы используем источник постоянного тока, ротор остановится после перехода в фиксированное положение. BLDC имеет инвертор, который преобразует источник постоянного тока в переменный, встроенный или внешний.
Изображение Кредиты: Toshiba Semiconductor и системы хранения данных
Какой самый быстрый бесщеточный двигатель?
Вопрос о том, какой из бесщеточных двигателей самый быстрый, остается спорным и неоднозначным. Слово «самый быстрый» может означать двигатель с очень высокими оборотами или двигатель, который может очень быстро управлять дроном FPV.
Размер, скорость и постоянная частота вращения — вот факторы, которые следует учитывать при выборе бесщеточного двигателя. Мы должны выбрать BLDC с более высоким KV. KV — это RPV или количество оборотов на вольт. Если напряжение увеличивается, двигатель быстро вращается. Вот список некоторых бесщеточных двигателей, которые работают очень быстро и эффективно.
Вот список некоторых бесщеточных двигателей, которые работают очень быстро и эффективно.
- Тракшас
- Полет
- Безумный
- betafpv
Бесщеточный двигатель Traxxas; Кредиты изображения: Traxxas.com
Применение двигателя BLDC:
Бесщеточные двигатели постоянного тока или двигатели BLDC являются очень важными компонентами в электронных устройствах, таких как электромобили, системы отопления, вентиляции и кондиционирования, стиральные машины, компрессоры, промышленные роботы, жесткие диски, проигрыватели компакт-дисков и DVD и т. Д.
Ниже приведены некоторые приложения BLDC-
- Промышленное использование в линейном и серводвигателе, приводе робота, приводном двигателе экструдера, приводе подачи станка с ЧПУ и т. Д.
- Используется в бытовой технике, такой как вентиляторы, сушилки, насосы, стиральные машины, воздуходувки и т. Д.
- Используется в авиационной промышленности для создания небольших дронов, а также в секторе здравоохранения.
 Д.
Д.Почему двигатели BLDC широко используются в промышленности?
Промышленные двигатели предпочитают BLDC в качестве основного оборудования во многих устройствах. Они очень эффективны, компактны и просты в обслуживании. В настоящее время стоимость этих двигателей также снизилась из-за увеличения их использования.
Производственные процессы требуют точного управления движением и стабильной работы для достойной работы при срабатывании, позиционировании и т. Д. BLDC вырабатывает высокий крутящий момент на низкой скорости, что хорошо для кранов, конвейерных лент. Кроме того, некоторые из них очень долговечны и могут использоваться до 30000 XNUMX часов. Вот почему они широко используются.
Каковы преимущества двигателя BLDC?
Бесщеточные двигатели постоянного тока не имеют коммутаторов или щеток, в отличие от щеточных двигателей постоянного тока. Повышенная долговечность, скорость и ускорение, меньший уровень шума и многие другие аспекты делают двигатель BLDC отличным выбором для различных применений.
Повышенная долговечность, скорость и ускорение, меньший уровень шума и многие другие аспекты делают двигатель BLDC отличным выбором для различных применений.
Вот основные преимущества двигателя BLDC:
- В нем нет щеток, которые ограничивают скорость, производят шум и пыль.
- Он может создавать больший крутящий момент на высокой скорости.
- Он имеет высокий КПД и более длительный срок службы благодаря отсутствию потерь на трение.
Другие преимущества BLDC включают небольшой размер, быстрый отклик, лучший отвод тепла и т. Д.
Почему двигатели BLDC предпочтительны в приложениях с высокими оборотами?
Бесщеточные двигатели постоянного тока имеют отличные характеристики скорости по отношению к крутящему моменту, что делает их пригодными для использования в машинах с высокими оборотами. Электромагнитные помехи, шум и потери также меньше в двигателях BLDC.
Механическая мощность = крутящий момент * скорость. Для большей мощности мы должны увеличить любое из них. В BLDC, когда мы нажимаем на тормоз, крутящий момент увеличивается, а скорость двигателя снижается, сохраняя мощность. Кроме того, компактность BLDC позволяет использовать его во многих современных электронных устройствах, требующих высоких оборотов.
Какие особенности имеет бесщеточный двигатель постоянного тока
Содержание
- 1 Работа двигателей постоянного тока бесщеточного типа
- 1.1 Общие параметры
- 1.2 Общие и отличительные черты
- 1.2.1 Общие характеристики моторов
- 1.2.2 Отличия
- 1.2.3 Бесщеточное возбуждение
- 1.3 Процесс управления
- 1.3.1 Трехфазные модификации
- 1.4 Подбор двигателя
- 1.5 Преимущества применения
- 1.6 Модельный ряд
- 1.6.1 MTS DC 6-30V 5A
- 1.6.2 DC9-60V 400 Вт BLDC
Эффективная работа производственных систем и оборудования – основная задача, решаемая современной автоматикой. В ней задействованы самые разные устройства, среди которых – двигатели бесщеточной конструкции. Рассмотрим же их ключевые особенности.
В ней задействованы самые разные устройства, среди которых – двигатели бесщеточной конструкции. Рассмотрим же их ключевые особенности.
Бесщеточный двигатель постоянного тока трехфазный привод
Моторы бесщеточного типа активно применяются в современной области хозяйственной деятельности, благодаря широкому перечню особенностей, которые существенно выделяют модели от других. Агрегаты компактные и в то же время функциональные, что расширяет перечень сфер, где их можно применять. Также устройства довольно экономичны, что обусловливает их рентабельность и общую выгоду применения. Далее мы обо все расскажем по порядку.
Общие параметры
Бесщеточный или бесколлекторный электродвигатель представляет собой силовой агрегат для работы с постоянным напряжением электросети. Конструктивно компонент похож на электромотор с постоянными магнитами. Ключевая особенность – отсутствие щеток и, как следствие – необходимости их замены или ремонта. Долговечность моторов обусловливается выделением минимума тепла в роторе.
Особенность конструкции состоит в реализации сложной схеме электрического привода, благодаря чему и удается обходиться без щеток. Данная компоновка подразумевает то, что роторное магнитное поле выполняет роль постоянного магнита, который бесперебойно синхронизируется со статорным полем. Эта особенность позволяет точно и быстро контролировать показатели скорости и момента вращения.
Система возбуждения такого двигателя регулируется по-другому, чем у обыкновенных щеточных двигателей. В первую очередь это обусловливается тем, что в конструкцию бесщеточного устройства входят средства, определяющие угловое положение роторов и полюсов магнита. Эти данные в свою очередь необходимы для управления переключениями сигналов. Для чего они используются? Для обеспечения обратной связи при регулировании работы полупроводников. В современных приборах можно смело отказываться от узлов механической коммутации и менять задачи статора и ротора в силовых агрегатах постоянного тока.
Общие и отличительные черты
Итак, в чем же особенность бесщеточного мотора и какие параметры у него общие, а какие отличительные от обычных устройств, работающих от источников питания постоянного тока?
Общие характеристики моторов
Первое, что объединяет устройства этих двух типов – конструкция. Она включает два ключевых элемента:
Она включает два ключевых элемента:
- ротор с катушечными обмотками. Эти элементы могут подключаться к постоянному току изнутри;
- статор с магнитами постоянного действия. Вместо магнитных компонентов могут применяться катушки электромагнитного типа, которые крепятся снаружи.
При питании двигателя от сети типа DC, внутри статора генерируется поле, которое может выполнять одно из двух действий: притягивать или отталкивать роторные магниты. В результате всех этих физических процессов ротор вращается и приводит в действие сопутствующие детали (например лопасти в квадрокоптерах).
Коммутирующий элемент необходим в конструкциях данных моторов для поддержания стабильности работы ротора. Это очень важно, ведь при соответствии детали статорным магнитным силам, он (ротор) попросту остановится. Основная задача, которую выполняет коммутатор – переключение постоянного тока через обмотки, тем самым, регулируя магнитное поле. Роторный элемент может бесперебойно вращаться, на протяжении всего времени подачи питания на мотор.
Отличия
Тип коммутатора – основное отличие между бесщеточными двигателями для DC и обычными моделями постоянного тока. В последнем случае конструкция включает угловые щетки. Главный недостаток этих составных компонентов – быстрое изнашивание.
Чтобы избежать быстрого выхода из строя, в моделях без щеток применяют датчики, как правило – датчики Холла. Назначение этих приборов – точное измерения роторного положения и состояния печатной платы. Микросхема здесь выполняет функции переключателя. Входные параметры датчиков также обрабатываются посредством печатной платы, которая дает возможность с высоким уровнем точности определять необходимый момент для переключения при активном вращении ротора.
Пример платы управления двигателем
Бесщеточное возбуждение
Это процесс уникален выполнением возбудителя и способом выпрямления тока, поступающего из якоря. Подача осуществляется напрямую в обмотки возбуждения ротора синхронного генератора. В роли возбудителя здесь выступает СГ, работающий от переменного тока (ас), обмотки возбуждения которого расположены на статоре и, соответственно, являются неподвижными. Обмотки же якоря установлены на ротор и присоединяются к преобразователю, который постоянно вращается. Ток уже с выпрямленными показателями направляется напрямую в роторную обмотку генератора.
Обмотки же якоря установлены на ротор и присоединяются к преобразователю, который постоянно вращается. Ток уже с выпрямленными показателями направляется напрямую в роторную обмотку генератора.
Процесс управления
Наличие электронного блока управления дает возможность проводить коммутацию элементов обмоток электрического привода. Чтобы определить точно момент переключения с использованием драйвера, необходимо отследить актуальное размещжение ротора. В этом поможет уже известный нам датчик Холла, который располагается непосредственно на приводе.
Если же у вас нет в наличии такого прибора, стоит произвести считывание напряжения, движущегося в обратном направлении. Оно получается в обмотках статора, которые на момент измерений не подсоединены к сети. В таких ситуациях применяется контроллер – специализированное комбинированное решение, позволяющее проводить мониторинг всех изменений и точно определять очередность коммутации. Также контроллерное устройство является основным для старта работы мотора, без него запустить прибор невозможно.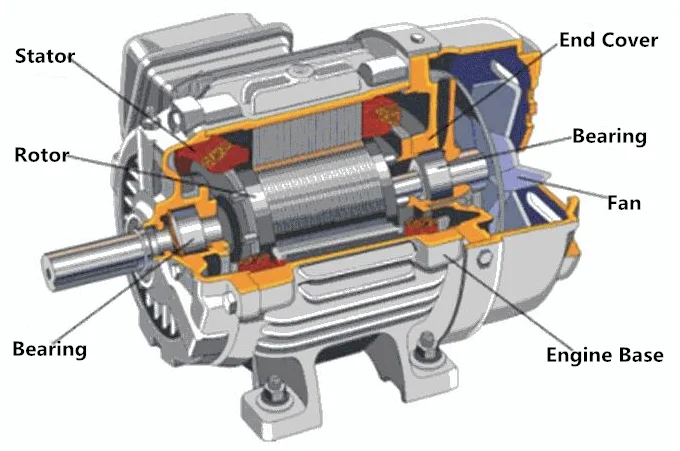
Трехфазные модификации
Данные модификации нередко встречаются среди бесколлекторных устройств, работающих с постоянным током. В частности, такие моторы можно увидеть на авиамоделях. Ключевая особенность – наличие преобразователей, которые и дают возможность работать от трех фаз, делая специализированные импульсы из напряжения DC.
Принцип работы приспособлений осуществляется по такому алгоритму:
- на первую катушку (назовем ее условно «А»), применяются импульсы со значением «+». На другую катушку «В» поступают сигналы с характеристиками «-». Из-за этого, якорь начинает вращаться. Датчики, смонтированные на приводе, фиксируют показания смещения и передают соответствующие сигналы на чувствительные элементы контроллера. После происходит коммутация;
- катушка «А» отключается, а сигнал «+» идет уже на третью обмотку – «С». Компонент «В» не изменяется;
- катушка «С» принимает импульс «плюсовой», «минусово» же подается на «А»;
- работают два компонента: «А» и «В». Каждый из них получает сигналы «+» и «-» соответственно;
- импульс «+» идет на вторую обмотку, а «-» — на третью;
- под конец снова запускается катушка «А», принимающая «плюсовые» импульсы, в то время, как «минусовой» поступает на «С».
 Каждый из них получает сигналы «+» и «-» соответственно;
Каждый из них получает сигналы «+» и «-» соответственно;Напряжения двигателя
Подбор двигателя
Существует множество материалов о том, как можно создать такой мотор самостоятельно. Главное – выбрать подходящий чертеж. Но, все же лучше отдать предпочтение заводским модификациям, которые отличаются высокой компактностью, надежностью и самое главное – безопасностью.
При подборе стоит учитывать параметры драйверов для ШИМ-каналов. Им свойственны такие параметры:
- сила тока. Имеется в виду максимально допустимый ее показатель, применяемый при обычном режиме функционирования приспособления;
- показатель штатного напряжения для обеспечения работы;
- уровни сопротивления электрических цепей контроллера;
- максимальное количество оборотов. Контроллер не даст возможности расширять вращение больше этого числа;
- интенсивность генерирования импульсов. Большинство моделей поддерживают данный параметр в диапазоне 7 – 8 кГц. Модели модернизированные имеют функцию перепрограммирования показателя, что позволяет увеличить его до уровня 16 и даже 32 кГц.
 Контроллер не даст возможности расширять вращение больше этого числа;
Контроллер не даст возможности расширять вращение больше этого числа;Первых 3 параметра напрямую определяют показатель мощности силового агрегата.
DC9-60V 400 Вт BLDC
Преимущества применения
К сильным сторонам устройств относят:
- увеличенный уровень КПД;
- выше показатели базовой мощности;
- оперативное достижение скорости вращения;
- минимум искрообразования;
- простота эксплуатации;
- не необходимости применять охлаждение.
Модельный ряд
Рассмотрим же некоторые популярные модели, представленные в этой категории.
MTS DC 6-30V 5A
MTS DC 6-30V 15A
Модель ШИМ контроллера рассчитана на работу с показателями напряжения 12 – 24 вольт. В процессе работы контролирует скорость работы двигателя.
В процессе работы контролирует скорость работы двигателя.
Параметры:
- 0,01 – 150 Вт – управляемая мощность;
- ШИМ частота – 13 кГц;
- рабочий цикл регулировки – 0 – 100%.
DC9-60V 400 Вт BLDC
Бесщеточный двигатель на 3 фазы, разработан для управления мотором PWM Hall. Конструкция включает модуль для драйвера двигателя и плату управления. Обеспечивает нормальную работу двигателя, аналоговый контроль.
Бесщеточный двигатель принцип работы
Работа бесщеточного электродвигателя основывается на электрических приводах, создающих магнитное вращающееся поле. В настоящее время существует несколько типов устройств, имеющих различные характеристики.
- Использование
- Описание и принцип работы
- Принцип работы БДКП
- Как работает коллекторная машина
- Как осуществляется управление
- Трехфазные бесколлекторные электродвигатели
- Преимущества и недостатки бесщеточных двигателей
С развитием технологий и использованием новых материалов, отличающихся высокой коэрцитивной силой и достаточным уровнем магнитного насыщения, стало возможным получение сильного магнитного поля и, как следствие, вентильных конструкций нового вида, в которых отсутствует обмотка на роторных элементах или стартере.
Обширное распространение переключателей полупроводникового типа с высокой мощностью и приемлемой стоимостью ускорило создание подобных конструкций, облегчило исполнение и избавило от множества сложностей с коммутацией.
Использование
Бесщеточный двигатель постоянного тока с постоянными магнитами встречается в основном в устройствах с мощностью в пределах 5 кВт.
В более мощной аппаратуре их применение нерационально.
Магниты в двигателях данного типа отличаются особой чувствительностью к высоким температурам и сильным полям.
Двигатели активно используются в электрических мотоциклах, автомобильных приводах благодаря отсутствию трения в коллекторе.
Описание и принцип работы
Бесщеточный (бесколлекторный) двигатель постоянного тока очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора.
Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей.
Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Обратимость рассматриваемой установки – ее уникальное свойство. Это значит, что они способны одинаково эффективно функционировать как в режиме двигателя, так и в режиме генератора. Необходимо лишь соответствующим образом выполнить подключение ротора и статора.
В общем виде принцип работы бесщеточного (коллекторного) электрического двигателя таков:
· При подключении электрического двигателя к источнику энергии, ток начинает протекать по обмоткам, как ротора, так и статора машины. В обоих конструктивных элементах начинается образование электромагнитного поля (возбуждения и якоря). Таким образом, взаимодействие двух полей приводит к образованию электромагнитного момента. Инженеры его, как правило, обозначают буквой «М».
· Образованный момент является вращающим. Он не обладает тормозящим эффектом.
· Момент провоцирует вращательное движение якоря.
· При вращении ротора наблюдается индуцирование ЭДС.
Важно! Если нагрузка, оказываемая на вал машины, достигнет определенной величины, это приведет к его вращению в обратную сторону – электрическая машина сменит режим работы, начав выполнять роль генератора.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Появление процессорной техники и силовых транзисторов позволило конструкторам отказаться от узла механической коммутации и изменить роль ротора и статора в электромоторе постоянного тока.
Принцип работы БДКП
В бесколлекторном электродвигателе роль механического коммутатора выполняет электронный преобразователь. Это позволяет осуществить «вывернутая наизнанку» схема БДКП — его обмотки расположены на статоре, что исключает необходимость в коллекторе.
Иными словами, основное принципиальное различие между классическим двигателем и БДКП в том, что вместо стационарных магнитов и вращающихся катушек последний состоит из неподвижных обмоток и вращающихся магнитов. Несмотря на то что сама коммутация в нём происходит похожим образом, её физическая реализация в бесщёточных приводах гораздо более сложна.
Как работает коллекторная машина
Чтобы произвести запуск коллекторного двигателя, потребуется подать напряжение на обмотку возбуждения, которая расположена непосредственно на якоре. При этом образуется постоянное магнитное поле, которое взаимодействует с магнитами на статоре, в результате чего проворачиваются якорь и коллектор, закрепленный на нём. При этом подается питание на следующую обмотку, происходит повтор цикла.
Как осуществляется управление
Электронный блок управления позволяет провести коммутацию обмоток привода. Для определения момента переключения при помощи драйвера отслеживается положение ротора по датчику Холла, установленном на приводе.
В том случае, если нет таких устройств, необходимо считывать обратное напряжение.
Оно генерируется в катушках статора, не подключенных на данный момент времени.
Контроллер — это аппаратно-программный комплекс, он позволяет отслеживать все изменения и максимально точно задавать порядок коммутации.
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током.
Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи.
Они позволяют из постоянного напряжения сделать трехфазные импульсы.
Работа происходит следующим образом:
- На катушку «А» поступают импульсы с положительным значением. На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки «А», при этом импульс положительного значения поступает на обмотку «С». Коммутация обмотки «В» не претерпевает изменений.
- На катушку «С» попадается положительный импульс, а отрицательный поступает на «А».
- Затем вступает в работу пара «А» и «В». На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку «В», а отрицательный на «С».
- На последнем этапе происходит включение катушки «А», на которую поступает положительный импульс, и отрицательный идет к С.
 Коммутация обмотки «В» не претерпевает изменений.
Коммутация обмотки «В» не претерпевает изменений.
И после этого происходит повтор всего цикла.
Преимущества и недостатки бесщеточных двигателей
Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы.
Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.

Что касается недостатков бесщеточных моторов, они также имеются. Отдельно стоит выделить высокую стоимость инструментов, в которых установлены такие двигатели. Второй существенный их недостаток – повышенная сложность и стоимость технического обслуживания.
Чтобы иметь возможность самостоятельно обслуживать бесщеточный электродвигатель, необходимо обладать достаточными знаниями в микроэлектронике. В связи с этим для ремонта и обслуживания такой техники людям часто приходится обращаться в сертифицированные сервисные центры, что влечет за собой дополнительные финансовые издержки.
Бесщеточный двигатель постоянного тока с постоянными магнитами встречается в основном в устройствах с мощностью в пределах 5 кВт. В более мощной аппаратуре их применение нерационально. Магниты в двигателях данного типа отличаются особой чувствительностью к высоким температурам и сильным полям.
Двигатели активно используются в электрических мотоциклах, автомобильных приводах благодаря отсутствию трения в коллекторе. Если своевременно проводить их техническое обслуживание и чрезмерно не перегружать, то ресурса таких установок может хватить на многие годы беспроблемной работы.
Понравилась статья? Расскажите друзьям:
Оцените статью, для нас это очень важно:
Проголосовавших: 6 чел.
Средний рейтинг: 3 из 5.
Все о бесщеточных двигателях в деталях —
Бесщеточный двигатель — это электродвигатель, работающий на постоянном токе (DC) и не имеющий механических щеток и коллектора, как в обычном щеточном двигателе. Хотя первоначальные затраты выше, он предлагает очевидные преимущества по сравнению со щеточным двигателем и является более рентабельным в долгосрочной перспективе. Бесщеточные двигатели используются в различных бестраншейных строительных работах.
Хотя первоначальные затраты выше, он предлагает очевидные преимущества по сравнению со щеточным двигателем и является более рентабельным в долгосрочной перспективе. Бесщеточные двигатели используются в различных бестраншейных строительных работах.
Бесщеточные двигатели иногда называют двигателями BLDC или BL. Электронно-коммутируемые двигатели (ECM, EC-двигатели) и синхронные двигатели постоянного тока являются синонимами.
Бесщеточные двигатели обычно устроены так же, как и синхронные двигатели с постоянными магнитами (СДПМ), хотя они также могут быть переключающими реактивными двигателями или асинхронными двигателями. Они также могут быть бегунками (ротор окружен ротором), бегунами (ротор окружен статором) или осевыми бегунами (ротор окружен статором) (ротор и статор плоские и параллельные).
Коллекторные и бесщеточные двигатели во времени
С 1856 года щеточные двигатели постоянного тока использовались в электрических силовых установках, кранах, бумагоделательных машинах и сталепрокатных заводах, и они все еще широко используются сегодня. Бесщеточные двигатели постоянного тока с электронными регуляторами скорости в значительной степени заменили щеточные двигатели во многих приложениях, поскольку их щетки изнашиваются и требуют частой замены. Из-за высоких требований к применению и сильного шума электрического разряда (называемого электростатическим разрядом, особенно в аэрокосмической технике) износ щеток стал серьезным недостатком, и был произведен новый двигатель.
Бесщеточные двигатели постоянного тока с электронными регуляторами скорости в значительной степени заменили щеточные двигатели во многих приложениях, поскольку их щетки изнашиваются и требуют частой замены. Из-за высоких требований к применению и сильного шума электрического разряда (называемого электростатическим разрядом, особенно в аэрокосмической технике) износ щеток стал серьезным недостатком, и был произведен новый двигатель.
Бесколлекторные двигатели намного новее, они были изобретены на заре изобретения электричества. Первый бесщеточный двигатель постоянного тока (BLDC), названный Т.Г. Уилсон и П.Х. Трики был изобретен в 1962 году в результате достижений в области твердотельных технологий в начале 1960-х годов. Бесщеточные двигатели являются наиболее предпочтительным выбором для компьютерных дисководов, робототехники и самолетов, поскольку они не требуют физического коммутатора.
сравнение бесщеточного и коллекторного двигателя
Бесколлекторные двигатели современности
Ранние бесколлекторные двигатели имели тот недостаток, что не могли генерировать много энергии, несмотря на свою долговечность.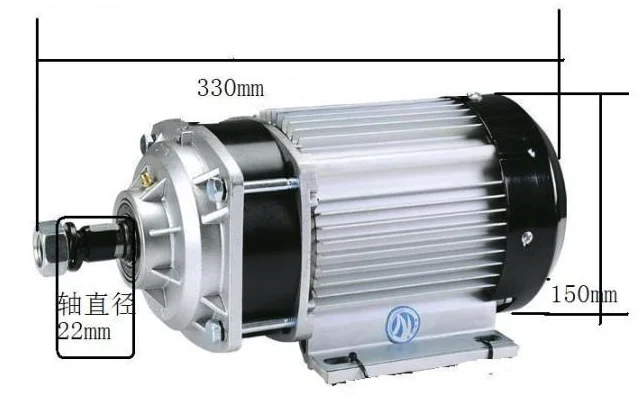 Бесщеточные двигатели могли генерировать столько же (или больше) мощности, сколько и щеточные двигатели, до того, как в 1980-х годах стали доступны более сильные материалы с постоянными магнитами. Роберт Э. Лордо изготовил первый крупногабаритный бесщеточный двигатель постоянного тока в конце 1980-х годов, мощность которого в десять (10) раз превышала мощность предыдущих бесщеточных двигателей.
Бесщеточные двигатели могли генерировать столько же (или больше) мощности, сколько и щеточные двигатели, до того, как в 1980-х годах стали доступны более сильные материалы с постоянными магнитами. Роберт Э. Лордо изготовил первый крупногабаритный бесщеточный двигатель постоянного тока в конце 1980-х годов, мощность которого в десять (10) раз превышала мощность предыдущих бесщеточных двигателей.
Рекомендуемое содержимое:
🟡 Что такое электродвигатели и как они работают?
Современные бесщеточные двигатели преодолевают многие недостатки щеточных двигателей за счет сочетания более высокой выходной мощности, меньшего размера и веса, улучшенного рассеивания тепла и эффективности, более широкого диапазона рабочих скоростей и чрезвычайно низкого электрического шума. Бесщеточные двигатели не имеют электрических соединений, которые могут изнашиваться, что обеспечивает большую надежность и более короткие интервалы технического обслуживания в коммерческих и промышленных приложениях.
Компоненты бесщеточного двигателя
Основные аспекты и конструкция бесщеточных двигателей
Статор типичного бесщеточного двигателя имеет трехфазную обмотку, а ротор содержит постоянный магнит. Он также доступен в однофазной, двухфазной и трехфазной конфигурациях. Как указывалось ранее, обмотка статора создает вращающееся магнитное поле, которое толкает магнитный ротор вперед. Для создания этого магнитного поля на катушку подается трехфазное напряжение.
Итак, как система различает, какие катушки запитаны, а какие должны быть? Для этой цели используется специальный электрический контроллер. Включение тока в ортогональные (перпендикулярные) обмотки осуществляется таким интегрированным коммутационным механизмом. Он также имеет датчики, которые определяют местоположение ротора. Чаще всего используются датчики Холла, однако также используются фотоэлектрические, индуктивные датчики и резольверы.
📌 T Контроллер изменяет соединение двух фаз для изменения направления вращения.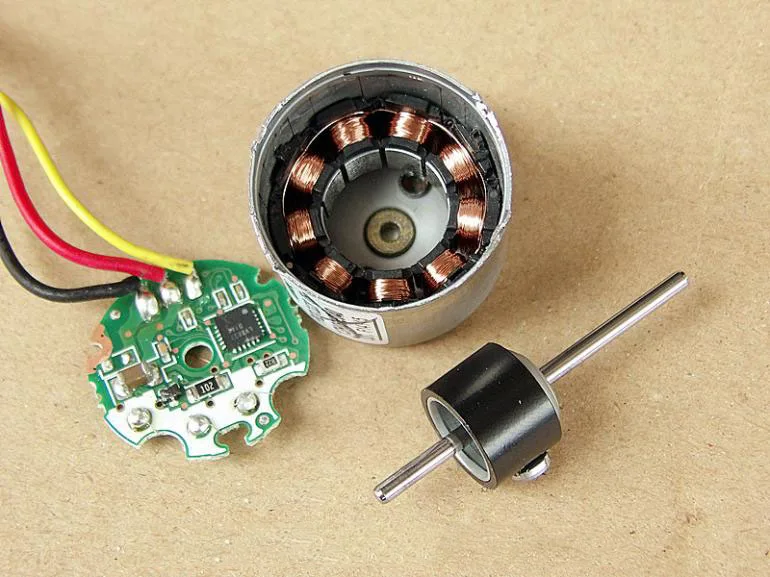 Его также можно использовать в качестве сервопривода или шагового двигателя.
Его также можно использовать в качестве сервопривода или шагового двигателя.
Схема бесщеточного двигателя
Бесщеточные двигатели постоянного тока Преимущества:
Бесщеточные двигатели имеют ряд преимуществ по сравнению с щеточными двигателями: широкий диапазон скоростей;
Недостатки бесколлекторных двигателей
Несмотря на множество преимуществ бесколлекторных двигателей, у них есть и ряд недостатков:
- Стоимость: Бесколлекторные двигатели имеют ряд недостатков, все из которых связаны с их повышенной сложностью конструкции. Для правильной последовательности заряда катушек статора BLDC требуется контроллер переключения. Это увеличивает стоимость производства, что отражается на более высокой стартовой стоимости.
- Усложнение: Добавление сложности увеличивает риск сбоя. Нам не удалось найти ни одного исследования, в котором бы сравнивалась частота отказов щеточных и бесщеточных электроинструментов, хотя часто предполагается, что более сложное оборудование выходит из строя с большей вероятностью.
 Для правильной последовательности заряда катушек статора BLDC требуется контроллер переключения. Это увеличивает стоимость производства, что отражается на более высокой стартовой стоимости.
Для правильной последовательности заряда катушек статора BLDC требуется контроллер переключения. Это увеличивает стоимость производства, что отражается на более высокой стартовой стоимости.Аккумуляторный инструмент, такой как дрель
Бесщеточные двигатели Применение
Бесщеточные двигатели выполняют многие функции, которые раньше выполняли коллекторные двигатели постоянного тока, но стоимость и сложность управления не позволяют бесщеточным двигателям полностью заменить коллекторные двигатели в недорогих секторах. Бесколлекторные двигатели, с другой стороны, стали доминировать во многих приложениях, включая компьютерные жесткие диски и CD/DVD-плееры. Бесщеточные двигатели используются исключительно для питания небольших охлаждающих вентиляторов в электрических устройствах.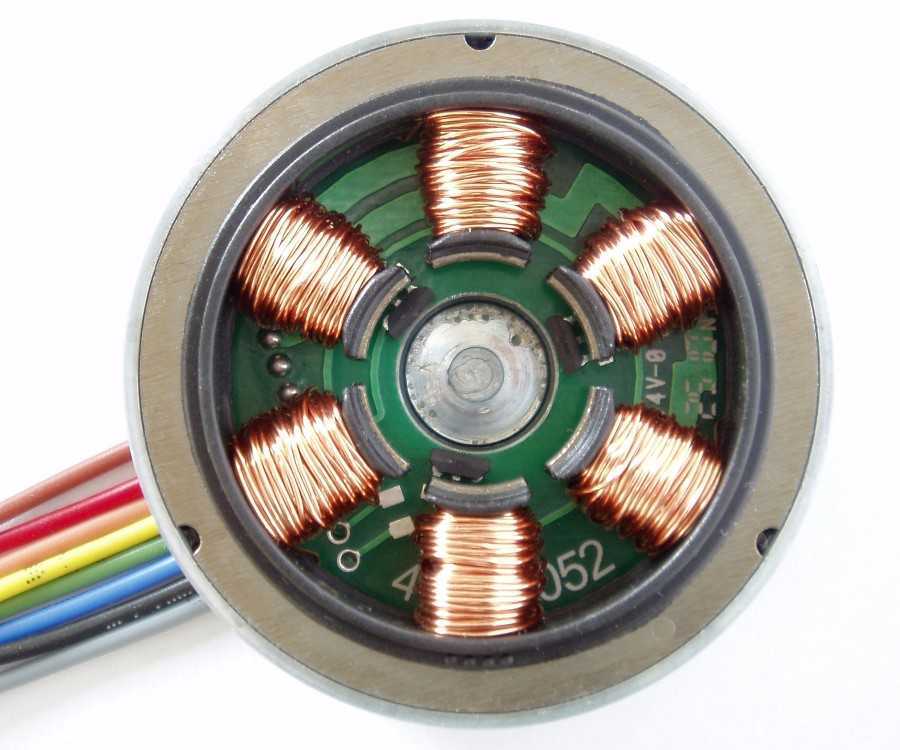 Они распространены в беспроводных электроинструментах, где повышенная эффективность двигателя позволяет использовать его в течение длительного времени без перезарядки аккумулятора. В проигрывателях с прямым приводом для граммофонных пластинок используются низкоскоростные маломощные бесщеточные двигатели.
Они распространены в беспроводных электроинструментах, где повышенная эффективность двигателя позволяет использовать его в течение длительного времени без перезарядки аккумулятора. В проигрывателях с прямым приводом для граммофонных пластинок используются низкоскоростные маломощные бесщеточные двигатели.
Аккумуляторные инструменты
Многие современные аккумуляторные инструменты используют бесщеточные двигатели, в том числе струнные триммеры, воздуходувки, циркулярные и сабельные пилы, дрели/шуруповерты. Бесщеточные двигатели имеют больше преимуществ по сравнению с щеточными двигателями (малый вес, высокая эффективность) для портативного оборудования с батарейным питанием, чем для больших стационарных инструментов, подключенных к розетке переменного тока, поэтому внедрение в этой части рынка было более быстрым.
Какой вариант лучше, щеточный или бесщеточный?
Бесщеточные двигатели для начинающих обеспечивают исключительную производительность и длительный срок службы. Эти типы требуются в приложениях, где требуется высокая скорость вращения и устойчивость к перегреву. Такое оборудование используется в роботах, медицинском оборудовании, станках с ЧПУ и другом дорогостоящем и ответственном промышленном оборудовании как часть системы охлаждения. Бесщеточные устройства того же размера более мощные, чем щеточные. Он также используется в ситуациях, когда требуются долговечные электродвигатели, не требующие особого обслуживания.
Эти типы требуются в приложениях, где требуется высокая скорость вращения и устойчивость к перегреву. Такое оборудование используется в роботах, медицинском оборудовании, станках с ЧПУ и другом дорогостоящем и ответственном промышленном оборудовании как часть системы охлаждения. Бесщеточные устройства того же размера более мощные, чем щеточные. Он также используется в ситуациях, когда требуются долговечные электродвигатели, не требующие особого обслуживания.
Коллекторные двигатели постоянного тока имеют меньшую мощность и стабильность, чем щеточные двигатели постоянного тока. Однако это недорого и просто. В результате гаджеты не выполняют сложных или длительных действий. В быту такая технология применяется в автомобилях, грузоподъемных механизмах, детских радиоуправляемых моделях и различных предметах быта (например, дрели). Из-за трения щеток и быстрого износа они требуют регулярного обслуживания, однако они очень долговечны в сложных промышленных условиях.
youtube.com/embed/JU08mR_isaw?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
Часто задаваемые вопросы ❓
Как интерпретировать цифры на бесщеточном двигателе?
Бесщеточные двигатели обычно обозначаются четырехзначным кодом, например , где обозначает ширину статора, а обозначает высоту статора. По сути, чем больше число и чем больше крутящий момент может создать двигатель, тем он шире и выше.
Сколько магнитов в бесщеточном двигателе?
Две катушки печатной платы взаимодействуют с шестью круглыми постоянными магнитами блока вентиляторов.
Как определить размер бесщеточного двигателя?
При определении размера бесщеточного двигателя постоянного тока проще всего начать с подбора размера двигателя (диаметра, длины). Диаметр колеблется от 13 до 30 миллиметров. Диаметр и длина бесщеточных щелевых двигателей постоянного тока измеряются в дюймах.
Аккумуляторные инструменты с бесщеточными двигателями лучше?
Бесщеточные двигатели превосходят щеточные по многим параметрам. Пользователи могут извлечь выгоду из снижения затрат на техническое обслуживание, повышения эффективности, а также меньшего количества тепла и шума.
Каков ожидаемый срок службы бесщеточных двигателей?
Если вам нужен двигатель, который прослужит долго, используйте бесщеточный двигатель. Срок службы щеточных двигателей ограничен типом щеток и составляет в среднем от 1000 до 3000 часов, но бесщеточные двигатели могут работать десятки тысяч часов.
Заключение 🧾
Бесколлекторный двигатель постоянного тока — блестящая идея, которая произвела революцию в области электродвигателей. Они просты и обтекаемы по конструкции, что позволяет транспортным средствам, таким как радиоуправляемые автомобили и дроны, работать с оптимальной эффективностью и контролем.
В этом посте мы рассмотрели, как работают двигатели, компоненты внутри них и многие типы двигателей BLDC. Мы также обсудили электромагнетизм и то, как ESC регулирует скорость двигателя. Эта основа позволяет нам понять, как максимизировать эффективность и как потребности колеблются в зависимости от предполагаемой функции дрона.-
Как работает бесщеточный двигатель постоянного тока
Содержание
Бесщеточные двигатели постоянного тока бесщеточные двигатели постоянного тока обычно способны достичь эффективность 85-90 процентов, в то время как у коллекторных двигателей обычно около 75-80 процентов. Щетки со временем изнашиваются, часто вызывая искры, которые могут быть опасны и могут сократить срок службы двигателя. Рекомендуется использовать бесщеточные двигатели постоянного тока, они тише, эффективнее и служат дольше. Двигатели BLDC предлагают множество преимуществ по сравнению с другими типами электродвигателей.
Как работает бесщеточный двигатель постоянного тока
Для лучшего понимания того, как работают бесщеточные двигатели, мы должны сначала вспомнить, как работают щеточные двигатели постоянного тока, поскольку они использовались в течение некоторого времени до появления бесщеточных двигателей постоянного тока.
В этом типе двигателя электрический ток пропускается через катушки, установленные в постоянном магнитном поле. Ток генерирует магнитные поля внутри катушек. Это приводит к перемещению катушек, поскольку каждая катушка оттягивается от другого полюса, а затем притягивается к противоположной стороне магнитного поля. Чтобы катушки продолжали вращаться, необходимо постоянно изменять направление тока, чтобы полярность катушек постоянно менялась, что заставляет катушки «преследовать» другие неподвижные полюса. Питание катушек подается постоянными токопроводящими щетками, которые соприкасаются с вращающимся коммутатором; это движение коммутатора, которое меняет направление тока, протекающего через катушки. Коллектор и щетки являются основными компонентами, которые отличают щеточный двигатель постоянного тока от двигателей других типов.
На картинке выше показана основная идея двигателя щетки. Неподвижные щетки подают электрический ток на вращающийся коммутатор. Когда коммутатор вращается, он постоянно меняет направление тока, протекающего через катушки, меняет полярность катушек, чтобы гарантировать, что они остаются в направлении по часовой стрелке. Коллектор может вращаться, потому что он соединен с ротором, на котором установлены катушки.
Почему бесколлекторные двигатели постоянного тока вращаются
Как следует из названия, в бесщеточных двигателях постоянного тока щетки не используются. В щеточных двигателях щетки передают ток через коммутатор к обмоткам ротора. Как бесколлекторный двигатель передает энергию катушкам на роторе? Он не может передавать, так как катушки не размещены в роторе. Ротор действует как постоянный магнит. Катушки не вращаются, а связаны со статором. Поскольку катушки не двигаются, нет необходимости в щетках или коммутаторе.
Преимущества бесщеточного двигателя постоянного тока
Бесщеточный двигатель постоянного тока с тремя катушками в статоре будет иметь 6 электрических проводов (по два на каждую катушку), которые подключены к катушкам. В большинстве случаев три провода соединены внутри, а остальные три провода торчат из корпуса двигателя (в отличие от двух проводов, которые выступают из двигателя щеток, как описано ранее). Проводка внутри корпуса двигателя BLDC сложнее, чем просто подключение отрицательного и положительного проводов к аккумуляторной ячейке. Мы более подробно изучим работу этих двигателей в следующем сегменте, который мы рассмотрим в этой серии. В заключение рассмотрим преимущества двигателей BLDC.
Основным преимуществом является их эффективность, поскольку они могут работать непрерывно при максимальной силе вращения (крутящем моменте). Щеточные двигатели, напротив, могут создавать максимальный крутящий момент при низких оборотах. Чтобы электрический щеточный двигатель создавал такой же крутящий момент, что и бесщеточная версия, модели потребуются магниты гораздо большего размера. Таким образом, даже самые маленькие двигатели BLDC будут обеспечивать большую мощность.
Еще одно важное преимущество, связанное с предыдущим, — это возможность управления. Бесщеточный двигатель BLDC управляется с помощью механизмов обратной связи, которые точно обеспечивают требуемый крутящий момент и скорость. Точный контроль снижает потребление энергии, а также производство тепла. когда двигатели питаются от батарей, продлевает срок службы батарей.
Двигатели постоянного тока BLDC также могут обеспечить более длительный срок службы и меньший электрический шум благодаря отсутствию щеток. Щеточные двигатели — отличный выбор, потому что коллектор и щетки изнашиваются из-за постоянного контакта, а также могут вызывать искрение при соприкосновении. В частности, электрический шум, он вызван сильными искрами, которые обычно возникают в местах, где щетки проходят через зазоры внутри коллектора. По этой причине двигатели BLDC обычно предпочтительнее в ситуациях, когда важно минимизировать электрические шумы.
Недостатки бесщеточного двигателя постоянного тока
К недостаткам бесщеточных устройств относятся возможность размагничивания постоянных магнитов, проблемы с контролем величины потока и высокая цена преобразователя, которая растет с ростом уровня мощности машины. Бесщеточные двигатели также страдают от пульсаций магнитного крутящего момента. Несмотря на то, что существует много исследований, посвященных двигателям BLDC, небольшое количество публикаций посвящено изучению электромагнитных явлений, таких как анализ электромагнитного поля, анализ магнитного сопротивления и температурные эффекты. Анализ пульсации крутящего момента обычно фокусируется на отставании крутящего момента.
Применение бесщеточных двигателей постоянного тока
Мы убедились, что бесщеточные двигатели постоянного тока обладают высокой эффективностью и управляемостью, а также имеют длительный срок службы. Для чего они работают? Благодаря своей эффективности и долговечности они часто используются в приборах, работающих в непрерывном режиме. Они уже давно используются в стиральных машинах, кондиционерах и других электронных устройствах для потребителей, а в последнее время они теперь используются в вентиляторах, и их эффективность позволила им резко снизить потребление энергии.
Их также можно использовать для управления вакуумными машинами. В одном случае изменение программы управления вызвало значительное увеличение скорости двигателя, что является одним из примеров превосходных возможностей управления, предлагаемых этими двигателями.
Двигатели постоянного тока BLDC также можно использовать для вращения жестких дисков. их долговечность обеспечивает надежность приводов в течение длительного времени. Кроме того, их энергоэффективность помогает сократить потребление энергии в области, где это становится все более важным.
Мы можем ожидать, что двигатели BLDC будут использоваться чаще в ближайшем будущем. Они, вероятно, будут использоваться для управления сервисными роботами, небольшими роботами, которые предоставляют услуги вне производства. Можно предположить, что шаговые двигатели могут лучше подходить для такой работы, в которой можно использовать импульсы для обеспечения точного управления позиционированием. Однако двигатели BLDC больше подходят для управления силами. В случае с шаговым двигателем, поддерживающим положение объекта, например манипулятора робота, потребуется массивный и постоянный ток. При использовании двигателя BLDC все, что требуется, — это постоянный ток, который пропорционален внешней силе, и это позволяет более эффективно контролировать силу. Двигатели BLDC также могут заменить щеточные двигатели постоянного тока на мобильных тележках и тележках для гольфа. Наряду с более высокими характеристиками двигатели BLDC также могут обеспечивать более точное управление, что, в свою очередь, может продлить срок службы батареи.
Бесщеточные двигатели постоянного тока BLDC, подходящие для дронов. Их способность обеспечивать точное управление делает их идеальными для многороторных дронов, в которых движение дрона точно контролируется за счет контроля скорости вращения каждого двигателя.
Каталожные номера:
https://www.ebmia.pl/wiedza/porady/automatyka-porady/silnik-bezszczotkowy-bldc-co-to-jest-jak-dziala-zastosowanie/
Применение и преимущества по сравнению с щеточными двигателями
Один из самых полезных типов двигателей на современном рынке называется бесщеточным двигателем. Вот что вам нужно знать о двигателях BLCD, различных типах, их применении, их преимуществах и их отличиях от щеточных двигателей. Как вы скоро узнаете, эти моторы могут творить удивительные вещи.
Свяжитесь с нами
Что такое бесщеточный двигатель постоянного тока и как он работает?
В отличие от обычных двигателей, в которых для выработки энергии используется набор металлических катушек, бесщеточный двигатель постоянного тока использует электричество для передачи сигналов через набор электромагнитных катушек. Эти сигналы заставляют катушки вращаться, что, в свою очередь, приводит к вращению вала. Вал можно использовать для питания оборудования или для передачи мощности другому оборудованию.
Конструкцию бесщеточных двигателей постоянного тока часто называют конструкцией с разомкнутой цепью, потому что, когда двигатель не работает, катушки разомкнуты и не генерируют энергию.
Традиционные двигатели постоянного тока часто называют «щеточными» двигателями постоянного тока, поскольку они содержат ряд медных щеток внутри двигателя, которые помогают передавать ток от источника питания к электромагнитам. Напротив, бесщеточные двигатели постоянного тока не содержат щеток и вместо этого используют постоянные магниты для передачи энергии.
Понимание основ бесщеточных двигателей постоянного тока
Бесщеточные двигатели имеют характеристики, аналогичные характеристикам традиционных щеточных двигателей постоянного тока, но одно очевидное отличие заключается именно в том, что следует из названия: у модели бесщеточных двигателей постоянного тока нет щеток. Для вас это изменение означает, что двигатели BLDC более надежны, поскольку требуется меньше оборудования.
Без использования щеток двигатель BLDC также более надежен и имеет более длительный срок службы, чем щеточные двигатели, что, в свою очередь, позволяет вашей компании сэкономить деньги на дополнительных расходах, связанных с будущим обслуживанием или полной заменой этого оборудования. Поскольку щетки также могут изнашиваться во время работы двигателя, это может вызвать искрение и привести к пожару, дополнительным проблемам и расходам для вашей компании.
Эффективность двигателя BLDC по сравнению с традиционным коллекторным двигателем является еще одним преимуществом использования бесщеточного двигателя. Бесщеточные двигатели имеют в целом более высокую скорость и крутящий момент и производят меньше шума, чем традиционные щеточные двигатели. Они также работают более эффективно и практически не теряют мощности, что является проблемой, которая может сопровождать щеточные двигатели из-за повышенного трения, вызванного щетками. Сообщается, что двигатели BLDC достигли скорости от 85 до 9.КПД составляет 0 процентов, что выше, чем у стандартных коллекторных двигателей, на 75–80 процентов.
Бесщеточные двигатели постоянного тока также должны иметь электронную коммутацию, что означает, что двигатель регулируется механизмом управления. Эта функция позволяет 3-фазному двигателю BLDC изменять скорость в разной степени, а также быстро ускоряться и замедляться, чтобы обеспечить наиболее эффективное использование мощности и производительности, когда речь идет о выходной мощности. Двигатели BLDC также обычно весят меньше, чем щеточные двигатели, но они могут обеспечивать аналогичную выходную мощность.
Типы двигателей BLDC
Существует два типа двигателей BLDC: с фиксированной частотой и с переменной частотой. Двигатели BLDC с фиксированной частотой имеют постоянную частоту вращения. Частотно-регулируемые двигатели BLDC имеют переменную частоту вращения. Оба типа поставляются с разными диапазонами оборотов для использования в разных приложениях.
- Фиксированная частота вращения: Бесступенчатый двигатель постоянного тока с фиксированной частотой вращения имеет постоянную частоту вращения при каждом значении скорости. Они распространены в приложениях, которые не требуют контроля скорости, включая наружное оборудование.
- Переменная скорость вращения: Частота вращения двигателя постоянного тока с переменной скоростью вращения может быть увеличена или уменьшена с помощью системы управления. Они распространены в приложениях, требующих контроля скорости, включая промышленное оборудование.
Преимущества двигателей BLDC
Диапазон скоростей с переменной нагрузкой
Для щеточных двигателей требуется так называемый коммутатор, который изменяет фазу магнитного поля в двигателе, чтобы поддерживать движение якоря. В двигателе постоянного тока с бесщеточной конструкцией коллектор заменен электронной функцией управления, управляющей вращением якоря. Наиболее широко используемыми двигателями постоянного тока для бесщеточных конструкций являются трехфазные двигатели, которые позволяют изменять скорость двигателя с разной скоростью. Этот уровень управления еще больше расширяет возможности применения бесщеточного двигателя постоянного тока.
Выдающийся диапазон постоянного крутящего момента
Благодаря электронному управлению наши бесщеточные двигатели постоянного тока могут создавать различные значения крутящего момента и выходной мощности. TelcoMotion предлагает широкий выбор бесщеточных двигателей постоянного тока с типоразмерами NEMA и метрическими размерами. Некоторые особенности нашей линейки двигателей:
- Диапазон размеров от 0,5 до 3,4 дюйма
- Выходная мощность до 660 Вт
- Невероятная долговечность
- Компактный размер
- Высокая скорость и высокая эффективность
Настраиваемые параметры
В то время как традиционные коллекторные двигатели постоянного тока невероятно чувствительны и просты в управлении, они полагаются на прямой контакт между щетками и коллектором. С другой стороны, бесщеточные двигатели обычно имеют более длительный срок службы и требуют минимального обслуживания или вообще не требуют его. Двигатель Telco с бесщеточной конструкцией постоянного тока — очевидный выбор для всех ваших потребностей.
Где применяются двигатели BLDC?
Бесколлекторные двигатели
используются для самых разных целей в коммерческом и промышленном мире благодаря их способности обеспечивать высокую скорость и эффективную работу. Кроме того, большинство современных устройств оснащены двигателями BLDC, что делает их очевидным выбором по сравнению с традиционными коллекторными двигателями.
Например, они обычно используются для промышленного позиционирования, требующего высокой точности, например, при проектировании жесткого диска ПК и другого электронного оборудования, такого как проигрыватели DVD и записывающие устройства Blu-ray. Другие области применения двигателей BLDC включают:
- Отопление, вентиляция и кондиционирование воздуха
- Электрические транспортные средства
- Насосы
- Лабораторное оборудование
- Топливные управления
- Стоматологические инструменты
- Электродвигатели переменного тока используют электромагниты в статоре, которые потребляют электроэнергию. Вместо этого в щеточных двигателях и двигателях BLDC обычно используются постоянные магниты.
- Во-вторых, в двигателях переменного тока наблюдается явление, известное как «скольжение», которое представляет собой «разницу между скоростью вращения ротора и скоростью вращающегося магнитного поля в статоре». Хотя скольжение неизбежно возникает при создании крутящего момента в двигателе переменного тока, оно напрямую связано с потерями мощности из-за нагрева.
- В-третьих, все двигатели переменного тока имеют потери реактивной мощности, а двигатели постоянного тока — нет.
- Двигатели постоянного тока, как правило, проще в установке, чем двигатели переменного тока.
- Водяные насосы
- Эльваторы
- остаются постоянными даже при изменении нагрузки на двигатель. Вот почему двигатели переменного тока часто используются в тяжелых промышленных условиях с постоянной скоростью.
- . потому что щетка и коллектор не трутся друг о друга и не изнашиваются (как это происходит в щеточных двигателях). Фактически, щеточные двигатели постоянного тока служат около 1000–3000 часов работы, тогда как двигатели BLDC — около 20 000 часов работы.
- Бесщеточные двигатели также имеют более высокую выходную скорость, они обычно могут работать примерно в шесть раз быстрее, чем щеточные двигатели.
- Скорость двигателей BLDC также считается более стабильной. Это связано с тем, что могут легко возникнуть расхождения между скоростью вращения ротора и скоростью вращающегося магнитного поля статора в двигателе переменного тока. Как мы упоминали ранее в этой статье, это явление называется «скольжением» и напрямую связано с потерями мощности из-за нагревания, которые также имеют место в коллекторных двигателях постоянного тока. В двигателях BLDC не происходит проскальзывания, что устраняет вызванные им расхождения в скорости.
- Двигатели постоянного тока могут мгновенно запускаться, останавливаться и реверсироваться, что очень важно, когда речь идет об управлении и эксплуатации производственного оборудования. По этой причине во многих «приложениях управления движением» используются двигатели постоянного тока с постоянными магнитами.
- Коллекторные двигатели имеют более низкие капитальные затраты, чем бесщеточные двигатели, поскольку для бесщеточных двигателей требуется контроллер для обеспечения «последовательности напряжения между тремя фазами». Однако щеточные двигатели изнашиваются быстрее; иногда приходится заменять щетки, что увеличивает затраты на техническое обслуживание. Если вы считаете двигатели BLDC более выгодным вложением, они могут быть дешевле в долгосрочной перспективе, потому что они практически не требуют обслуживания и служат намного дольше.
. видеть, что бесщеточный двигатель — хорошая вещь, чтобы иметь. Хитрость заключается в том, чтобы знать, где его найти. У Telco прочная репутация производителя одних из лучших когда-либо созданных бесколлекторных двигателей.
Выбор между щеточным и бесщеточным двигателями
Чтобы выбрать двигатель, который наилучшим образом соответствует вашим потребностям, вам необходимо иметь общее представление о различиях между щеточными и бесщеточными двигателями. Основное различие между щеточными и бесщеточными двигателями заключается в том, что первый оснащен щеткой и коллектором, а второй щетки не имеет. Бесщеточным двигателям не нужны щетки, потому что они основаны на электромагнетизме.
Так что выгоднее иметь? Считается, что бесщеточные двигатели превосходят щеточные, потому что они более эффективны. Бесщеточный двигатель обычно на 10-15% эффективнее, чем средний коллекторный двигатель.
Бесщеточные двигатели также безопаснее в использовании, поскольку щеточные двигатели имеют плохую привычку генерировать больше искр, что может быть опасно.
Найдите лучшие бесколлекторные двигатели постоянного тока прямо здесь, в Telco!
Вам нужны бесщеточные двигатели постоянного тока для вашего бизнеса? Тогда вам нужно связаться с Telco. У нас есть широкий выбор двигателей BLDC и превосходная репутация, с которой другие просто не могут конкурировать.
Найдите лучшие бесщеточные двигатели постоянного тока для своего бизнеса сегодня в Telco!
Свяжитесь с нами
Бесщеточный двигатель постоянного тока (BLDC) Преимущества
Что такое электродвигатель
Терминология, связанная с электродвигателем, может быть очень запутанной. Существуют двигатели переменного и постоянного тока, и каждый из них состоит из разных типов и типов типов, а затем два типа могут быть одинаковыми, но названными по разным характеристикам и т. д. Какой бы запутанной ни была эта терминология, мы живем в мир, наполненный электродвигателями, поэтому любой может извлечь выгоду из того, что сможет различать их.
Например, когда вы думаете о новом электроинструменте, вы наверняка столкнетесь с термином «бесщеточный электродвигатель постоянного тока» в качестве основной характеристики. Но какую пользу это дает на самом деле? Чем эти двигатели отличаются от других электродвигателей? И как они работают? Если вы задали себе любой из этих вопросов, вы попали в нужное место.
Начнем с основ. Электродвигатель используется для преобразования электрической энергии в механическую. Вообще есть два вида электричества (переменный ток и постоянный ток). Двигатели переменного тока преобразуют электричество переменного тока в механическую энергию, а двигатели постоянного тока — в электричество постоянного тока. Как двигатели переменного тока, так и двигатели постоянного тока используют электрический ток для создания вращающегося магнитного поля, которое, в свою очередь, вращает якорь двигателя. Короче говоря, все двигатели работают за счет вращения магнитного поля, разница заключается в том, как конструкция двигателя делает это. Двигатели переменного тока обычно более мощные, чем двигатели постоянного тока, в то время как двигатели постоянного тока могут быть на 30% более эффективными.
Поскольку рынки смещаются в сторону использования бесщеточных двигателей постоянного тока из-за их многочисленных преимуществ, возможно, вам интересно, что представляет собой этот тип двигателя и чем он отличается от двигателей переменного тока и щеточных двигателей постоянного тока. В этой статье мы рассмотрим эти различия, а затем углубимся в то, что делает бесколлекторный двигатель постоянного тока таким революционным в мире электродвигателей. Мы также коснемся еще более недавней эволюции бесщеточных двигателей постоянного тока: двигателя с электронной коммутацией (EC).
Различные типы электрических двигателей
Типы электрических двигателей Copyright Argentum
ves vs Corqu электродвигателей, необходимо понимать некоторую терминологию. Например, мощный «крутящий момент» может принести большую пользу некоторым двигателям. Но есть разница между «крутящим моментом» и «мощностью»; крутящий момент всего механическая энергия (или сила), а мощность равна суммарной электрической энергии (мощность).
Формула мощности для электродвигателей
Формула крутящего момента Copyright Argentum
Асинхронные и синхронные двигатели типы двигателей при погружении в эту тему. Вот простое определение каждого из этих терминов применительно к двигателям:
Асинхронный: магнитные поля статора и ротора вращаются с разной скоростью для создания крутящего момента. Магнитное поле ротора обычно медленнее, чем у статора в асинхронных двигателях.
Синхронный: магнитные поля статора и ротора вращаются с одинаковой скоростью для создания крутящего момента.
Двигатели переменного тока
Хотя другие электродвигатели были изобретены ранее, когда в 1887 году был изобретен асинхронный двигатель переменного тока, это все еще была революция. Никола Тесла изобрел его в 1887 году и запатентовал в 1888 году. Асинхронный двигатель представляет собой асинхронный двигатель, и ему приписывают начало второй промышленной революции за счет «резкого повышения эффективности производства энергии и обеспечения возможности распределения электроэнергии на большие расстояния». . В 1891, двигатели переменного тока вышли на новый уровень, когда компания General Electric начала разработку трехфазных асинхронных двигателей. В настоящее время наиболее распространенным типом двигателя переменного тока является новый вариант асинхронного двигателя, называемый трехфазным двигателем с короткозамкнутым ротором. Итак, когда мы сравниваем двигатели с двигателями переменного тока, мы говорим именно о двигателе переменного тока.
Как работает асинхронный двигатель переменного тока
В двигателе с короткозамкнутым ротором переменный ток течет к статору (стальному кольцу, содержащему другие компоненты двигателя). Статор остается неподвижным, но ток создает магнитное поле, которое меняется в зависимости от частоты переменного тока. Магнитное поле наводит ток на ротор (это называется индукцией), и взаимодействие магнитных полей на статоре и роторе вращает якорь двигателя, создавая крутящий момент. Ниже приведена схема двигателя переменного тока.
Как работает трехфазный асинхронный двигатель переменного тока Изображение предоставлено инженерным мышлением
Преимущества двигателей переменного тока: они могут подавать более высокий электрический ток.
2. Асинхронные двигатели, такие как двигатель с короткозамкнутым ротором, обычно имеют более высокую рабочую скорость, чем синхронные двигатели. Примечание: двигатели постоянного тока синхронны.
Двигатель переменного тока этого типа обычно работает со скоростью около 1500 об/мин, тогда как синхронные двигатели переменного тока плавно и стабильно работают на более низких скоростях. Однако, несмотря на то, что 1500 об/мин — это неплохо, имейте в виду, что бесколлекторные двигатели постоянного тока иногда могут работать со скоростью до 100 000 об/мин.
3. Более длительный срок службы, чем у щеточных двигателей постоянного тока
Все асинхронные двигатели переменного тока являются бесщеточными. Меньше движущихся частей означает меньшее трение и нагрев, что снижает износ компонентов двигателя. Отсутствие щеток, коллекторов и контактных колец также делает их дешевле.
4. Силовые нагрузки более защищены
Двигатели переменного тока имеют более низкую пусковую мощность.
5. Resists изменения скорости, даже когда нагрузка изменяется
Недостатки к двигателям переменного тока
. эффективные бесщеточные двигатели постоянного тока. Две вещи, которые способствуют этой неэффективности:
Установка
Применение для двигателей переменного тока:
Двигатели постоянного тока
Существует два типа двигателей постоянного тока: коллекторные и бесщеточные (BLDC). Бесщеточные двигатели постоянного тока также можно разделить на два типа: однофазные и трехфазные. Между двигателями переменного тока, щеточными двигателями постоянного тока и бесщеточными двигателями постоянного тока бесщеточные двигатели постоянного тока, по-видимому, обеспечивают наибольшие преимущества: у них нет «потерь возбуждения» по сравнению с двигателями переменного тока, а также нет трения щеток и потерь тепла / энергии по сравнению с щеточными двигателями постоянного тока. .
Первый BLDC двигатель был разработан в 1962 наряду с достижениями в твердотельной технологии. Хотя эти ранние двигатели BLDC были долговечными, они не могли генерировать большой мощности. В конце 1980-х годов Роберт Э. Лордо разработал первый крупногабаритный бесщеточный двигатель постоянного тока, который был в 10 раз мощнее, чем предыдущие бесщеточные двигатели постоянного тока. Бесщеточные двигатели постоянного тока все чаще вытесняют двигатели переменного тока. Благодаря своей скорости, точности и эффективности они теперь могут заменить двигатели переменного тока для промышленных применений, таких как водяные насосы и системы отопления, вентиляции и кондиционирования воздуха.
Коллекторные и бесщеточные двигатели постоянного тока
Как следует из названия, бесщеточные двигатели постоянного тока не имеют щеток, а щеточные двигатели постоянного тока имеют. Щетки в щеточных двигателях постоянного тока не имеют щетины, как у зубной щетки, они обычно сделаны из углерода и действуют как пружины. Они используются для обеспечения катушек (намотанных вокруг ротора) током, заставляющим двигатель вращаться. Простая разница в двигателе, имеющем щетки или не имеющем их, имеет много последствий для эффективности, применения, стоимости и сложности оборудования.
Изображение предоставлено для схемы щеточного двигателя постоянного тока (Технические материалы)
Схема бесщеточного двигателя постоянного тока (Изображение предоставлено)
Различия в работе щеточных и бесщеточных двигателей постоянного тока
0 объясняют эти схемы и различия в работе щеточных двигателей и двигателей постоянного тока BLDC, двигатель BLDC, по сути, вывернут наизнанку; Двигатели BLDC имеют постоянные магниты на роторе и электромагниты на статоре. Эта конструкция устраняет необходимость в щетках, поскольку устраняет необходимость в щетках для отражения электромагнитного поля (что и делается в щеточном двигателе). В двигателях BLDC вместо этого используется цифровой контроллер для зарядки электромагнитов в статоре, чтобы вращать ротор на полные 360 градусов.
Изображение Кредит для Sontian Motor
Преимущества безмолвных двигателей DC (BLDC)
1. Lifetime
2. Выходная скорость и точность
3. Меньшие эксплуатационные расходы и меньшее техническое обслуживание
4. Эффективность. моторы). Это отсутствие контакта означает, что в бесщеточных двигателях также отсутствует трение и тепло. Меньшие потери энергии в виде тепла делают бесщеточный двигатель более эффективным. Фактически, двигатели BLDC обычно имеют КПД 85-9.0%, тогда как у щеточных моторов обычно только 75-80%. Это означает, что, например, для таких приложений, как электроинструменты, эта повышенная эффективность продлевает срок службы батареи (это означает, что между зарядками можно сделать больше).
Источник изображения для статьи «Эффективность двигателей с ЕС»
5. Размер
- Бесщеточные двигатели также более компактны. Даже с электронным контроллером их бесщеточная конструкция все еще легче, что позволяет использовать оборудование, в котором они используются, также более компактно (например, драйвер M18 Milwaukee).
6. Крутящий момент и управление
- Двигатели BLDC также имеют более высокое «соотношение крутящего момента к массе» и повышенный крутящий момент на ватт подводимой мощности (повышенная эффективность). Кроме того, двигатели BLDC сохраняют крутящий момент на разных уровнях скорости, в то время как щеточные двигатели испытывают небольшую потерю крутящего момента на более высоких скоростях.
- Поскольку компьютеры управляют электрическим током в двигателе BLDC, двигатели BLDC могут обеспечить гораздо более точное управление движением.
Недостатки бесколлекторных двигателей постоянного тока
Несмотря на их многочисленные преимущества, было бы упущением, если бы мы не рассмотрели недостатки бесколлекторных двигателей постоянного тока. Это действительно сводится к стоимости и сложности; Двигатели BLDC имеют более сложную конструкцию, поскольку в них используется электронное устройство связи и часто используются датчики. Эти сложности не только увеличивают стоимость двигателей BLDC, но также предполагается, что «более сложное оборудование с большей вероятностью выйдет из строя». Поэтому, если вы ищете двигатель для менее требовательного и экономичного применения, щеточный двигатель постоянного тока или двигатель переменного тока, вероятно, отлично подойдут.
Приложения
Бесколлекторные двигатели постоянного тока (BLDC)
- Электроинструменты
- Компьютерные вентиляторы и жесткие диски во многих бытовых приборах или робототехнике.
- Электромобили (EV)
- Приложения для управления движением
- Посудомоечные машины
- Холодильники и морозильники
- А теперь… HVAC! Фактически, бесщеточные двигатели постоянного тока в системах ОВКВ выполняют ту же работу, что и двигатели переменного тока, но двигатели постоянного тока позволяют системам ОВКВ «работать как минимум на 50 % эффективнее, чем [с] двигателями переменного тока».
Коллекторные двигатели постоянного тока
Эти двигатели до сих пор используются в простых устройствах, где нет необходимости в постоянной работе двигателей, например, в стеклоочистителях, автомобильных окнах и двигателях регулировки положения сиденья в автомобилях.
Кроме того, они часто по -прежнему используются в:
- Насосы с аккумулятором
- Медицинское оборудование
- Принтеры
Электронная смена (EC) Motor
9002. Эта статья на этой статье. Двигатели переменного тока, коллекторные двигатели постоянного тока и двигатели BLDC, но есть еще один тип двигателя, о котором вы услышите, прочитав несколько статей о двигателях BLDC: двигатель с электронной коммутацией (EC).
Мы тоже сталкивались с этим типом, но не смогли определить разницу между бесщеточными двигателями постоянного тока и двигателями постоянного тока. На самом деле, EE Power утверждает, что «двигатель с электронной коммутацией — это трехфазный бесщеточный двигатель постоянного тока. Он состоит из трех основных компонентов: печатной платы, электронного блока управления и трехфазного двигателя с ротором на постоянных магнитах». Похоже, что ЕС-двигатель — это просто бесконтактный двигатель постоянного тока, который характеризуется методом коммутации, а не наличием щеток . ЕС-двигатели также отличаются от двигателей BLDC прошлого тем, что они «могут подключаться напрямую к источникам питания переменного тока с помощью встроенной электроники». Итак, для целей этой статьи мы будем рассматривать их как новую эволюцию двигателей BLDC, но не отдельно от них.
По данным Enervex, в настоящее время существует два типа EC-двигателей:
- С внутренним управлением: этот EC-двигатель часто потребляет мощность переменного тока и преобразует ее в мощность постоянного тока в своей схеме. Вы бы управляли этим мотором с помощью встроенной электроники.
- Внешнее управление: этот двигатель также может потреблять энергию переменного тока, а также преобразовывать переменный ток в постоянный. Поскольку печатная плата или частотно-регулируемый привод (ЧРП), управляющий этим двигателем, расположена снаружи, этот тип «предлагает расширенный диапазон регулирования скорости и множество вариантов управления скоростью». Дополнительный контроль скорости и опции обусловлены тем фактом, что в этом типе ЕС-двигателя нет «внутренней электроники, которая может быть повреждена». Это также позволяет использовать ЕС-двигатели с внешним управлением в высокотемпературных приложениях.
Если бы мы добавили эти два типа двигателей в нашу блок-схему (сверху), она могла бы выглядеть так: питались от «переменного тока», учитывая, что это бесщеточные двигатели постоянного тока. Но, немного покопавшись, мы смогли прояснить и это. ЕС-двигатели используют постоянное напряжение, а их системы управления преобразуют мощность постоянного тока в точные импульсы, чтобы заставить их работать. Несмотря на то, что двигатели постоянного тока используют источник питания постоянного тока, ток переключается на переменный (или, скорее, импульсный постоянный ток), чтобы питать обмотки двигателя, что необходимо делать с помощью высокочастотного переменного тока. ЕС-двигатели находят все более широкое применение, в том числе: небольшие вентиляторы, серводвигатели, системы управления движением, небольшие бытовые приборы и даже конвейерные ленты и конденсаторы.
Что мы узнали
Электродвигатели используются практически во всех отраслях промышленности, включая медицину, сельское хозяйство, автомобилестроение и контроль микроклимата внутри помещений (отопление, охлаждение, вентиляция и т. д.). Из-за этого, даже если вы не инженер-электрик или инженер-механик, все равно полезно знать основы электродвигателя (особенно если вы находитесь на рынке для нового электроинструмента и задаетесь вопросом, что такое бесщеточный двигатель постоянного тока). ).
Бесщеточные двигатели постоянного тока (BLDC) завоевывают популярность на протяжении десятилетий благодаря своим многочисленным преимуществам по сравнению с двигателями переменного тока и коллекторными двигателями постоянного тока. Как мы рассмотрели в этой статье, эти преимущества в основном включают более длительный срок службы, более высокую эффективность и меньшие требования и затраты на техническое обслуживание. Часто определяется, что эти преимущества экономят деньги в долгосрочной перспективе и, следовательно, перевешивают более высокие первоначальные затраты на двигатель BLDC. Мы надеемся, что по мере развития технологий, связанных с двигателями BLDC и EC, эти двигатели станут более надежными, компактными и экономичными.
Как примечание автора, это была сложная тема для освещения. Итак, если у вас есть что добавить, включая вопросы или комментарии, мы рекомендуем вам связаться с нами через наш веб-сайт и сообщить нам об этом! Особенно, если вы думаете, что мы пропустили что-то важное.
Подведение итогов
Переход от двигателей переменного тока к двигателям, работающим от постоянного тока, — это лишь один из способов, которым все больше и больше наших повседневных устройств питаются от электричества постоянного тока (DC). С ростом количества устройств и систем зданий, питающихся от электричества постоянного тока, становится все более очевидным, что мы переживаем электрическую революцию. Фактически, потребление постоянного тока в зданиях может достигать 74% в зданиях, в которых используются зарядные устройства для электромобилей и оборудование ОВКВ с двигателями постоянного тока. Со всеми этими устройствами (а теперь и с растущим числом двигателей), которым требуется электричество постоянного тока, имеет смысл питать наш мир постоянного тока электричеством постоянного тока. В настоящее время наши линии электропередач обеспечивают электроэнергию переменного тока (AC), но вы можете сократить потери энергии в своем здании, внедрив систему распределения электроэнергии постоянного тока. Если вы хотите узнать больше об этом, вы можете посетить веб-сайт Cence, чтобы прочитать об их системе питания постоянного тока с поддержкой plug-and-play для коммерческих зданий.
Управление двигателем, часть 1: Введение в бесколлекторные двигатели постоянного тока Видео
Из серии:
Блок управления двигателем
Мелда Улусой, MathWorks
Изучите основы бесколлекторных двигателей постоянного тока (BLDC). Двигатели BLDC имеют много преимуществ по сравнению с щеточными двигателями постоянного тока. Они имеют высокую эффективность и низкие эксплуатационные расходы и широко используются в бытовой технике, робототехнике и автомобильной промышленности.
Вы узнаете:
- Внутреннее устройство BLDC
- Как смоделировать BLDC в Simulink ® с помощью Simscape Electrical™ и исследовать форму напряжения противо-ЭДС
- Как BLDC управляется с помощью шестиступенчатой коммутации (трапециевидное управление)
- Как BLDC и синхронные машины с постоянными магнитами (PMSM) обычно управляются с помощью трапецеидального и полевого управления, соответственно
Посмотрите это видео, чтобы узнать, как построить модель БКЭП с нуля и смоделировать его противо-ЭДС с помощью Simscape Electrical.
Модель, использованная в этом видео, доступна в этом репозитории GitHub.
В этой серии мы поговорим о бесщеточных двигателях постоянного тока. В этом видео мы расскажем об основах и о том, как работают эти моторы, а в следующих мы подробнее обсудим управление моторами.
От повседневных устройств до более сложных машин используются бесщеточные двигатели постоянного тока, которые преобразуют электрическую энергию во вращательное движение. Бесщеточные двигатели постоянного тока, также называемые BLDC, предлагают множество преимуществ по сравнению со своими щеточными аналогами. BLDC обеспечивают более высокую эффективность и требуют меньшего обслуживания, и поэтому они заменили щеточные двигатели во многих приложениях за последние несколько десятилетий.
Оба типа двигателей работают по похожему принципу, в котором вращательное движение создается за счет притяжения и отталкивания магнитных полюсов постоянных и электромагнитов. Однако способ управления этими двигателями сильно отличается. Для BLDC требуется сложный контроллер для преобразования мощности постоянного тока в трехфазное напряжение, в то время как щеточным двигателем можно легко управлять с помощью постоянного напряжения.
Здесь мы покажем вам упрощенную анимацию коллекторного двигателя постоянного тока. Пропуская постоянный ток через обмотки катушки, мы генерируем электромагнит с этими полюсами. Затем эти полюса взаимодействуют с полюсами постоянного магнита и заставляют ротор вращаться. Обратите внимание, что через каждые пол-оборота ротора, чтобы ротор продолжал вращаться, нам нужно переставлять полюса электромагнита, что делается путем переключения полярности тока в обмотках катушки. Такое переключение фаз называется коммутацией. В щеточных двигателях коммутация происходит механически, когда щетки соприкасаются с коллектором ротора при вращении двигателя. Из-за этого физического контакта щетки со временем изнашиваются, что влияет на работу двигателя.
BLDC преодолевают недостатки щеточных двигателей, заменяя механическую коммутацию коммутацией с электронным управлением. Чтобы лучше понять это, давайте посмотрим на структуру двигателя BLDC.
Вы можете думать о BLDC почти как о перевернутой версии коллекторного двигателя, потому что постоянные магниты теперь становятся ротором, а обмотки катушки становятся статором. Существуют двигатели с различным расположением магнитов, в которых статор может иметь разное количество обмоток , а ротор может иметь несколько пар полюсов. Помимо различных конфигураций, вы также можете встретить двигатели с аналогичной структурой, синхронные машины с постоянными магнитами или СДПМ.
BLDC и PMSM определяются как синхронные двигатели с постоянными магнитами в их роторах. Их ключевым отличием является форма напряжения противо-ЭДС. Двигатели действуют как генератор, когда они вращаются. Это означает, что в статорах индуцируется напряжение обратной ЭДС, которое противодействует напряжению привода двигателя. Обратная ЭДС является важной характеристикой двигателя, поскольку, глядя на ее форму, мы можем сказать, какой у нас тип двигателя, а также определяет тип алгоритма управления, который нам нужно использовать для управления нашим двигателем. BLDC имеют трапециевидную форму и обычно управляются трапециевидным управлением. Но СДПМ управляются полевым управлением, потому что они демонстрируют синусоидальную обратную ЭДС. Иногда двигатели PMSM и BLDC используются взаимозаменяемо в сообществе по управлению двигателями, что может вызвать путаницу в отношении их профилей противо-ЭДС. Но в этой серии видеороликов мы будем называть двигатели с трапециевидной противо-ЭДС BLDC, а двигатели с синусоидальной противо-ЭДС — СДПМ.
Простой способ наблюдения за формой обратной ЭДС – это моделирование. Мы можем смоделировать BLDC с одной парой полюсов и клеммами с разомкнутой цепью. Это означает, что ни одна из катушек не управляется. Но мы можем приложить некоторый крутящий момент, чтобы вращать ротор, чтобы он действовал как генератор, а затем измерить напряжение в фазе А, что даст нам противо-ЭДС фазы А. Как вы видите на этом осциллографе, противо-ЭДС двигателя BLDC имеет трапециевидную форму, которая включает в себя области, где напряжение остается постоянным. Это говорит нам о том, что мы можем управлять этим двигателем с помощью постоянного напряжения.
Далее мы поговорим о внутренней работе двигателя. Для этого мы будем использовать простую конфигурацию, в которой ротор состоит только из одной пары полюсов, а статор состоит из трех катушек, расположенных под углом 120 градусов. Катушки могут получать питание, пропуская через них ток, который мы будем называть фазами A, B и C. Северный полюс ротора показан красным, а синий представляет южный полюс.
В настоящее время ни одна из катушек не находится под напряжением, а ротор неподвижен. Приложение напряжения к двум фазам, А и С, создает комбинированное магнитное поле вдоль пунктирной линии. В результате теперь ротор начинает вращаться, чтобы выровняться с магнитным полем статора, как показано на этой анимации.
Существует шесть возможных способов возбуждения пар катушек. Коммутируя две фазы одновременно, мы можем заставить магнитное поле статора вращаться, что заставит ротор вращаться и оказаться в положениях, показанных на анимации. Угол ротора измеряется относительно горизонтальной оси, и существует шесть различных положений ротора, каждое из которых находится на расстоянии 60 градусов друг от друга. Это означает, что если мы сможем коммутировать правильные фазы каждые 60 градусов, мы сможем заставить двигатель вращаться. И это называется шестиступенчатой коммутацией или трапециевидным управлением. Обратите внимание, что при большем количестве пар полюсов коммутация происходит чаще. Чтобы правильно коммутировать двигатель в нужное время с правильными фазами, нам нужно знать положение ротора, которое обычно измеряется с помощью датчиков Холла.
Давайте обсудим, как полюса взаимодействуют друг с другом. Здесь стрелки представляют относительные магнитные силы, а толщина стрелки указывает на напряженность поля. Эти два одинаковых полюса отталкивают друг друга, заставляя ротор вращаться против часовой стрелки. В то же время противоположные полюса притягиваются друг к другу, и ротор продолжает вращаться в том же направлении. Когда он совершает поворот на 60 градусов, происходит следующая коммутация. Давайте также покажем магнитное поле статора, которое мы обсуждали ранее на анимации. Как видите, коммутация происходит таким образом, что ротор никогда не выравнивается с магнитным полем статора, а всегда преследует его.
Вот два факта, которые могут объяснить такое поведение. Во-первых, когда магнитные поля ротора и статора идеально совпадают, двигатель создает нулевой крутящий момент. Поэтому мы никогда не позволяем им выравниваться. Во-вторых, максимальный крутящий момент возникает, когда поля расположены под углом 90 градусов друг к другу. Таким образом, цель состоит в том, чтобы приблизить этот угол к 90 градусам. Однако в двигателях BLDC мы никогда не достигаем 90 градусов с помощью шестиступенчатой коммутации, но угол колеблется в некотором диапазоне. И это благодаря простому характеру трапециевидного управления. Но более продвинутые методы, такие как поле-ориентированное управление, обычно используемые для управления СДПМ, как мы обсуждали ранее, позволяют генерировать больший крутящий момент, достигая 90 градусов между магнитными полями статора и ротора.
Для управления фазами шестиступенчатой коммутации используется трехфазный инвертор для преобразования мощности постоянного тока в трехфазные токи, которые показаны на анимации красным и синим цветом. Чтобы подать положительный ток на одну из фаз, необходимо включить переключатель, подключенный к этой фазе на стороне высокого напряжения. А для отрицательного тока переключатель низкой стороны должен быть включен. Постоянное напряжение преобразуется трехфазным инвертором, чтобы поддерживать постоянную скорость двигателя. Но чтобы управлять двигателем на различных скоростях, нам нужно иметь возможность регулировать приложенное напряжение. Один из способов сделать это — использовать ШИМ. Но об этом мы поговорим подробнее в следующих видео. Для получения дополнительной информации о двигателях BLDC не забудьте перейти по ссылкам под этим видео.
Код загрузки и файлы
Получите модели, используемые в этом видео
Сопутствующие товары
- Simscape Electrical
Узнать больше
Скачать модель, использованную в этом видео
Бесплатное пробное ПО для проектирования силовой электроники
Simulink для электрификации
Управление двигателем BLDC с помощью Simulink
Сообщество управления силовой электроникой
Повышение квалификации для перехода на электромобили
Получите технические документы и видеоролики, объясняющие моделирование и симуляцию контроллеров двигателей
BLDC Motors — Oz Robotics
BLDC Motors — Oz Robotics
Сортировать по популярностиСортировать по среднему рейтингуСортировать по последнимСортировать по цене: от низкой к высокойСортировать по цене: от высокой к низкойСортировать по В продаже
Показано 1–35 из 146 результатов
RMD-X8 Pro V2 Двигатель с драйвером V3 Редукторный двигатель BLDC Блинчик с энкодером и приводом CAN BUS
Распродажа!
389,00 $
Торговая марка: MyActuatorБесколлекторный двигатель MAD M8C08 IPE V2.
0 180 кВ для мультироторов, гексакоптеров и октокоптеров с длительным временем полета269,00 $ Бренд: MAD Components
Бесколлекторный двигатель MAD M8C08 IPE V2.0 100 кВ для мультироторов, гексакоптеров и октокоптеров с длительным временем полета
269,00 $ Марка: MAD Components
Бесколлекторный двигатель MAD M8C08 IPE V2 150 кВ для мультироторов, гексакоптеров и октокоптеров с длительным временем полета
269,00 $ Бренд: MAD Components
Бесщеточный двигатель MAD M8C08 IPE V2 85 кВ для мультикоптера, гексакоптера и октокоптера с длительным временем полета
269,00 $ Бренд: MAD Components
BLDC мотор для дронов T-MOTOR MN4012 KV340
92,90 $ Торговая марка: Т-Мотор
- Интеллектуальный двигатель постоянного тока
, интегрированный с контроллером — MyActuator RMD-X4
215,00 $ Торговая марка: MyActuator
RMD-X10 V3 Серводвигатель постоянного тока BLDC с большим крутящим моментом 50 Н·м для роботов-манипуляторов и четвероногих роботов, RS485 с новым драйвером V3
Распродажа!
539,00 $
Торговая марка: MyActuatorДвигатель BLDC для дронов Высокоэффективный и тяговый Т-образный двигатель P80Ⅲ без штифта KV100 KV120
199,90 $ Марка: T-Motor
BLDC Drone Motor с отличными характеристиками охлаждения T-MOTOR MN501-S с рейтингами KV240, KV300 и KV360
99,90 $ Бренд: T-Motor
RMD-X10 V3 Серводвигатель BLDC с большим крутящим моментом 50 Н·м Применение для четвероногого робота-манипулятора, CAN BUS
Распродажа!
539,00 $
Торговая марка: MyActuatorMyActuator RMD-X4 Микродвигатель 1:6 Полая конструкция Высокая точность Легкий вес Высокая скорость 600 об/мин
215,00 $ Торговая марка: MyActuator
MyActuator RMD-X4 1:6 Микродвигатель Высокоточный Легкий BLDC 24 В Высокоскоростной 600 об/мин CAN BUS
169,00 $ Торговая марка: MyActuator
MyActuator RMD-X4 Микромотор 1:6 Высокая точность Легкий BLDC 24 В Низкоскоростная шина CAN 250 об/мин
$169.
00 Торговая марка: MyActuator RMD-L-9025 Низкоскоростной серводвигатель постоянного тока с высоким крутящим моментом Блинчик Плоская конструкция Прямой драйвер 12–30 В CAN BUS
210,00 $ Торговая марка: MyActuator
RMD-L-9010 12-30 В 150 Вт Бесщеточный серводвигатель постоянного тока Встроенный кодировщик FOC Driver Rotbo Arm Turntable
175,00 $ Торговая марка: MyActuator
RMD-L-9015-35T 1.67N.M 12-30v Smart DC Servo Motor Turntable Gimbal Robot Arm 14-битный энкодер CAN BUS
180,00 $ Торговая марка: MyActuator
RMD-L-7015-23T BLDC Двигатель, интегрированный с контроллером двигателя и датчиком положения CAN BUS
125,00 $ Торговая марка: MyActuator
RMD-L-5015-10T Диаметр 50 мм 24 В 0,38 Н. М 50 Вт 14-битный энкодер Двигатель постоянного тока для Rc Car Robot Boat CAN BUS
98,00 $ Торговая марка: MyActuator
RMD-L-5005 Микро бесщеточный серводвигатель постоянного тока Привод карданного двигателя 12–24 В, 50 Вт, CAN-ШИНА
86,00 $ Торговая марка: MyActuator
RMD-L-4015 12-24 В микро бесщеточный роторный серводвигатель постоянного тока для скейтборда CAN BUS
89,00 $ Торговая марка: MyActuator
Водонепроницаемый бесщеточный серводвигатель постоянного тока для манипулятора робота CAN BUS
238,00 $ Торговая марка: MyActuator
RMD-X10 V3 BLDC серводвигатель для четвероногого робота-манипулятора и CAN BUS с драйвером V1
529,00 $ Торговая марка: MyActuator
Двигатель BLDC для дронов вертикального взлета и посадки от T-Motor MN801-S KV150
249,99 $ Бренд: T-Motor
RMD-X8 S2 V3 MyActuator Бесщеточный серводвигатель постоянного тока с большим крутящим моментом 25 Н.