Содержание
Электромеханический анализ асинхронного двигателя с помощью численного моделирования
В 1800-х годах два ученых — Никола Тесла и Галилео Феррарис — независимо друг от друга пришли к созданию асинхронного двигателя переменного тока (конструкции предложенные учеными различались). Такие машины переменного тока (AC) оказались надежной альтернативой двигателям постоянного тока (DC), которые были популярны в то время. Изучение асинхронных двигателей подразумевает учёт множества физических явлений, которые в них происходят. В данной статье мы покажем, как можно провести детальный электромеханический анализ такого устройства с помощью программного обеспечения COMSOL Multiphysics®.
История развития конструкции асинхронных двигателей
Не смотря на то, что и Никола Тесла и Галилео Феррарис построили ранние версии асинхронных двигателей переменного тока в одно время в 19 веке, Тесле (как большому приверженцу технологий на основе переменного тока) чаще приписывают изобретение двигателя. Это устройство оказалось одной из самых популярных электрических машин, а будущие его модификации оказались долговечными, надежными и адаптируемыми.
Это устройство оказалось одной из самых популярных электрических машин, а будущие его модификации оказались долговечными, надежными и адаптируемыми.
Сверху: Асинхронный двигатель Тесла. Изображение предоставлено Z22 — собственная работа. Доступно по лицензии CC BY-SA 3.0 через Wikimedia Commons. Снизу: Современный трехфазный асинхронный двигатель. Изображение в открытом доступе через Wikimedia Commons.
Инженеры продолжают совершенствовать эти двигатели за счёт детального анализа их производительности, что требует учёта разнообразных физических эффектов. Так, электромеханический анализ конструкции трехфазного асинхронного двигателя можно реализовать за счет функциональных возможностей модулей «Динамика многотельных систем» и «AC/DC» в нашей программе. Давайте рассмотрим демонстрационную модель, которая доступна в библиотеке моделей и приложений COMSOL Multiphysics®, начиная с версии 5.3. (Вы также можете найти её в онлайн-галерее моделей и приложений.)
Численный электромеханический анализ трехфазного асинхронного двигателя
Все ключевые элементы 3D-модели трехфазного асинхронного двигателя представлены на схеме ниже.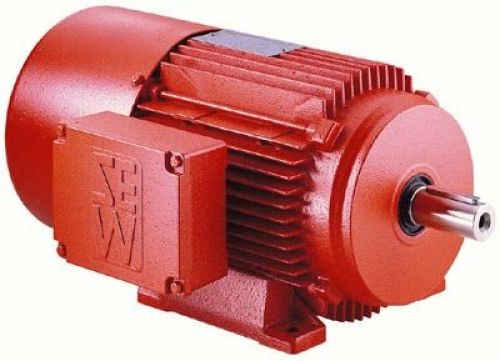 Мы будем явно моделировать каждую деталь за исключением подшипников и основания, которые мы опишем как безмассовые пружины.
Мы будем явно моделировать каждую деталь за исключением подшипников и основания, которые мы опишем как безмассовые пружины.
Геометрическая сборка трехфазного асинхронного двигателя с корпусом.
В нашем примере статор и ротор слегка смещены друг относительно друга, в результате чего появляется асимметрия небольшого воздушного зазора между ними. В результате неё в двигателе возникают вибрации, которые можно проанализировать с помощью численного моделирования. Вихревые токи в роторе при его вращении индуцируются за счёт гармонического тока в обмотках статора.
Сопряженный электродинамический и многотельный механический расчёт в COMSOL Multiphysics®
В модели мы проводим два сопряженных исследования: электродинамический расчёт в 2D и расчёт многотельной динамики в 3D. В этих исследованиях мы используем следующие физические интерфейсы: Rotating Machinery, Magnetic для описания электромагнитных полей в двигателе и Multibody Dynamics для моделирования движения ротора и вибраций корпуса.
Сначала обсудим настройки электромагнитной части модели. Мы используем упрощенную модель, содержащую только три основные части:
- Ламинированный стальной статор с медными обмотками
- Ротор, стальной внутри и алюминиевый снаружи
- Асимметричный воздушный зазор между ними
Обратите внимание, что 2D-геометрия, показанная ниже, является поперечным сечением полной 3D-геометрии. Переменный ток 60 Гц на многовитковых (2045 витков) обмотках статора мы задаем с помощью условия Coil с опцией Homogenized Multi-Turn.
Дополнительная информация о геометрических размерах и электромагнитной модели приведена в документации.
Поперечное сечение модели трехфазного асинхронного двигателя. Обозначены (A, B и C) три различные катушки статора — три фазы двигателя.
«Переключим передачу» и рассмотрим настройки для механической части задачи. В ней мы используем полную 3D-геометрию, в которой статор, ротор и вал заданы как жесткие тела, при этом ротор жестко закреплен на валу. Упругие шарнирные соединения между ротором и корпусом из конструкционной стали имитируют подшипники, которые поддерживают ротор и через которые передаются усилия/вибрации на корпус. Что касается корпуса, то в модели он рассматривается как упругий, а для его соединения с основанием используются эластичные неподвижные соединения. Угловая скорость ротора определяется заданным крутящим моментом.
Упругие шарнирные соединения между ротором и корпусом из конструкционной стали имитируют подшипники, которые поддерживают ротор и через которые передаются усилия/вибрации на корпус. Что касается корпуса, то в модели он рассматривается как упругий, а для его соединения с основанием используются эластичные неподвижные соединения. Угловая скорость ротора определяется заданным крутящим моментом.
В итоге мы проводим электромеханический расчёт для сопряженных моделей магнитной и многотельной динамической частей двигателя. Так, электромагнитные силы и крутящие моменты, вызванные несоосностью статора и ротора, которые рассчитываются в интерфейсе Rotating Machinery, Magnetic задаются как механические нагрузки в интерфейсе Multibody Dynamics. При этом поворот шарнирного соединения, определяемый в интерфейсе Multibody Dynamics подставляется в интерфейс Rotating Machinery, Magnetic для определения угловой скорости ротора.
Результаты расчёта трехфазного асинхронного двигателя
Давайте рассмотрим данные расчёта временных зависимостей нормы магнитной индукции и электромагнитных сил, действующих на ротор. На графике для электромагнитных сил мы наблюдаем колебания силы в поперечном направлении, которые вызваны несоосностью статора и ротора.
На графике для электромагнитных сил мы наблюдаем колебания силы в поперечном направлении, которые вызваны несоосностью статора и ротора.
Норма магнитной индукции в роторе и статоре с течением времени (слева) и электромагнитные силы ротора в поперечном и осевом направлениях (справа).
Проанализируем расчетные данные по электромагнитному крутящему моменту: когда частота вращения ротора равна электрической частоте статора, электромагнитный момент падает до нуля, если к валу не приложена нагрузка. Задержка по времени, требуемая для выравнивания частоты вращения ротора и электрической частоты статора, зависит от инерции ротора. В этом случае ротору требуется 0.7 секунды для выхода на постоянную скорость.
Электромагнитный крутящий момент ротора (слева) и угловая скорость (справа) в зависимости от времени.
Совместная анимация скорости вращения ротора и распределением механических напряжений по Мизесу в корпусе показывает зоны с высоким напряжением. Области вблизи подшипника и места крепления корпуса на основание имеют самые высокие значения напряжений.
Области вблизи подшипника и места крепления корпуса на основание имеют самые высокие значения напряжений.
Распределение напряжений по Мизесу в корпусе и скорость ротора.
На приведенных ниже графиках показаны силы, действующие на Подшипник 1, Подшипник 2 и Крепление 1, в зависимости от времени. Эти силы передаются через упругий корпус к основанию.
Силы, действующие на подшипник 1 (слева) и подшипник 2 (посередине) в поперечном и осевом направлениях. Силы, действующие на одно из соединений между корпусом и основанием (справа).
Проанализировав частотный спектр электромагнитных сил, мы можем сделать вывод, что частота колебаний составляет 120 Гц, что вдвое превышает электрическую частоту статора. Несмотря на это, график частотного спектра для места соединения корпуса с основанием показывает доминирующий частотный вклад около 60 Гц с несколькими пиками около 83 Гц — первой собственной частоты корпуса асинхронного двигателя.
Частотный спектр электромагнитных сил ротора (слева) и сил в соединении корпус-основание (справа).
Наконец, давайте рассмотрим вращательное (орбитальное) движение ротора, которое возникает в результате вибрации ротора в поперечном направлении относительно статора. Оно вызвано электромагнитными силами, действующими на ротор в поперечном направлении, и конечной жесткостью подшипников, поддерживающих концы ротора. Орбиты, показанные на следующем графике, не являются концентрическими из-за асимметричной инерции ротора в осевом направлении.
Орбитальное движение ротора, сочетающее вращение и вибрации, в местах расположения первого и второго подшипников.
Хотите внимательно разобрать данный пример электромеханического расчёта? Откройте учебную модель с помощью кнопки, расположенной ниже.
Материалы учебной модели
Узнайте больше про асинхронные двигатели и электромеханическое моделирование
- Ознакомьтесь с несколькими статьями нашего корпоративного блога, в которых разбирается сопряжение механических и электродинамических расчётов:
- Численное моделирование чувствительных элементов акселерометра для измерения больших ускорений
- Компания ETREMA анализирует магнитострикционные материалы с помощью моделирования
- Прочитайте о моделировании асинхронных двигателей в блоге COMSOL:
- Анализ ассинхронного двигателя: Верификационная задача TEAM
- Как автоматизировать проектирование обмоток в электрических машинах с использованием приложения для моделирования
схема.
 Электродвигатели постоянного и переменного тока
Электродвигатели постоянного и переменного тока
В статье вы узнаете, что такое электродвигатели переменного тока, рассмотрите их устройство, принцип действия, область применения. Стоит отметить, что сегодня в промышленности более 95 процентов всех используемых двигателей приходится на асинхронные машины. Они получили большое распространение в связи с тем, что у них высокая надежность, они могут служить очень долго за счёт своей ремонтопригодности.
Принцип работы асинхронных двигателей
Чтобы понять, как функционирует электродвигатель, можно провести небольшой эксперимент. Конечно, для этого потребуется наличие специального инструмента. Установите магнит в форме подковы так, чтобы он приводился в движение при помощи ручки. Как вы знаете, у магнита имеется два полюса. Между ними необходимо расположить цилиндр, изготовленный из меди. С таким расчетом, что он может свободно вокруг своей оси вращаться. Теперь сам эксперимент. Начинаете раскручивать магнит, при этом создается поле, которое двигается. Внутри медного цилиндра начинают возникать вихревые токи, которые противодействуют полю магнита.
Внутри медного цилиндра начинают возникать вихревые токи, которые противодействуют полю магнита.
В результате этого медный цилиндр начинает вращение в ту сторону, в которую двигается постоянный магнит. Причем его скорость оказывается несколько ниже. Причина этого — при равной скорости силовые линии перестают пересекаться с полем магнита. Магнитное поле вращается синхронно. А вот скорость движения самого магнита несинхронна. А если немножко сократить определение, то асинхронна. Отсюда и название электрической машины — асинхронного электродвигателя. Если грубо, то схема электродвигателя переменного тока примерно такая же, как и в приведенном эксперименте. Только магнитное поле создается статорной обмоткой.
Двигатели постоянного тока
Они несколько отличаются от асинхронных электродвигателей переменного тока. Во-первых, в нём имеется одна или две статорных обмотки. Во-вторых, способ изменения частоты вращения ротора несколько иной. Но направление вращения ротора изменяется переполюсовкой (у асинхронных машин меняются местами фазы питающей сети). Изменить скорость ротора двигателя постоянного тока можно, если увеличить или уменьшить напряжение, подаваемое на статорную обмотку.
Изменить скорость ротора двигателя постоянного тока можно, если увеличить или уменьшить напряжение, подаваемое на статорную обмотку.
Двигатель постоянного тока не может работать без обмотки возбуждения, которая находится на роторе. Передача напряжения происходит при помощи щеточного узла. Это самый ненадежный элемент конструкции. Щетки, изготовленные из графита, со временем стираются, что приводит к выходу из строя мотора, ему необходим ремонт. Заметьте, что электродвигатели постоянного и переменного тока имеют одни и те же элементы, но их конструкции отличаются существенно.
Конструкция электродвигателя
Как и любая другая нестатическая электрическая машина, асинхронный двигатель состоит из двух основных частей — статора и ротора. Первый элемент неподвижный, на нём размещаются три обмотки, которые соединяются по определенной схеме. Ротор является подвижным, его конструкция называется «беличьей клеткой». Причина такого названия в том, что внутреннее устройство очень похоже на колесо с белкой.
Последней, конечно же, нет в электродвигателе. Центровка ротора производится при помощи двух крышек, устанавливаемых на статоре. В них имеются подшипники, которые облегчают вращение. На задней части электродвигателя устанавливается крыльчатка. С ее помощью проводится охлаждение электрической машины. На статоре сделаны ребра, которые улучшают теплоотдачу. Таким образом электродвигатели переменного тока работают в нормальном тепловом режиме.
Статор асинхронного двигателя
Стоит отметить, что у статора современных асинхронных электродвигателей полюсы невыраженные. Если говорить проще, то внутри вся поверхность идеально гладкая. В целях уменьшения потерь на вихревых токах, сердечник набирается из очень тонких листов стали. Эти листы очень плотно прилегают друг другу и впоследствии закрепляются в корпусе из стали. Статор имеет пазы для закладывания обмоток.
Обмотки изготовлены из медного провода. Соединение их производится в «звезду» или «треугольник». В верхней части корпуса имеется небольшой щиток, полностью заизолированный. В нем находятся контакты для подключения и соединения обмоток. Причем соединить обмотки можно при помощи перемычек, устанавливаемых в этом щитке. Устройство электродвигателя переменного тока позволяет быстро провести соединение обмоток в нужную схему.
В нем находятся контакты для подключения и соединения обмоток. Причем соединить обмотки можно при помощи перемычек, устанавливаемых в этом щитке. Устройство электродвигателя переменного тока позволяет быстро провести соединение обмоток в нужную схему.
Ротор асинхронного электродвигателя
О нем было уже немного сказано. Он похож на беличью клетку. Конструкция ротора собирается из тонких стальных листов, как и статора. В пазах ротора находится обмотка, но она может быть нескольких типов. Все зависит от того, фазный или короткозамкнутый ротор. Наиболее распространенные последние конструкции. Толстые медные стержни укладываются в пазы без изоляционного материала. С обоих концов эти стержни соединяются медными кольцами. Иногда вместо «беличьей клетки» применяются литые роторы.
Но есть еще электродвигатели переменного тока с фазным ротором. Они используются намного реже, в основном для электродвигателей, у которых очень большая мощность. Второй случай, при котором необходимо использовать фазные роторы в электродвигателях — создание большого усилия в момент запуска. Правда, для этого необходимо использовать специальный реостат.
Правда, для этого необходимо использовать специальный реостат.
Способы запуска асинхронного электродвигателя
Запустить асинхронный электродвигатель переменного тока несложно, достаточно только подключить статорные обмотки в трехфазную сеть. Производится подключение при помощи магнитных пускателей. Благодаря им можно практически автоматизировать запуск. Даже реверс сделать можно без особых трудностей. Но в некоторых случаях необходимо снижать напряжение, которое подводится к статорным обмоткам.
Производится это благодаря использованию схемы подключения типа «треугольник». При этом запуск производится, когда обмотки соединены по схеме «звезда». При увеличении числа оборотов, достижении максимального значения обмотки необходимо переключить на схему «треугольник». При этом происходит уменьшение потребляемого тока примерно в три раза. Но необходимо учитывать, что не каждый статор может нормально функционировать при подключении по схеме «треугольник».
Регулирование частоты вращения
В промышленности и быту все большую популярность приобретают частотные преобразователи. С их помощью можно легким движением руки изменить скорость вращения ротора. Стоит заметить, что электродвигатели переменного тока используются совместно с частотными преобразователями в большинстве механизмов. Он позволяет осуществить тонкую настройку привода, при этом нет необходимости использовать магнитные пускатели. Все органы управления подключаются к контактам на частотном преобразователе. Настройки позволяют изменять время разгона ротора электродвигателя, его остановки, время минимальной и максимальной скорости, а также множество других защитных функций.
С их помощью можно легким движением руки изменить скорость вращения ротора. Стоит заметить, что электродвигатели переменного тока используются совместно с частотными преобразователями в большинстве механизмов. Он позволяет осуществить тонкую настройку привода, при этом нет необходимости использовать магнитные пускатели. Все органы управления подключаются к контактам на частотном преобразователе. Настройки позволяют изменять время разгона ротора электродвигателя, его остановки, время минимальной и максимальной скорости, а также множество других защитных функций.
Заключение
Теперь вы знаете, как происходит работа электродвигателя переменного тока. Даже изучили конструкцию наиболее популярного асинхронного двигателя. Он является самым дешевым из всех, которые представлены на рынке. Кроме того, для его нормального функционирования нет необходимости использовать различные вспомогательные устройства. В частности, реостаты. И только такое дополнение, как частотный преобразователь, способно облегчить эксплуатацию асинхронного электродвигателя, существенно расширить его возможности.
Асинхронные и мотор-редукторы переменного тока
Информация о продукте
Решения
Техническая информация
Размер двигателя
Загрузки
Виртуальный выставочный зал
Свяжитесь с нами
αSTEP
Шаговые двигатели
Бесщеточные двигатели постоянного тока
Серводвигатели
Редукторные двигатели переменного тока
Линейные приводы
Поворотные приводы
Сетевые продукты
Вентиляторы охлаждения
Бесплатная доставка для онлайн-заказов. Принять условия.
Асинхронные двигатели и мотор-редукторы > Асинхронные двигатели с постоянной скоростью > Асинхронные двигатели
Однофазные асинхронные двигатели переменного тока и мотор-редукторы
Асинхронные двигатели переменного тока оптимальны для однонаправленной и непрерывной работы, такой как конвейерная система. Все, что вам нужно, это подключить конденсатор и подключить двигатель к сети переменного тока, и двигатель можно будет легко использовать.
- 1 Вт (1/750 л.с.) до 400 Вт (1/2 л.с.)
- Мотор-редукторы с параллельным валом, прямоугольным сплошным валом, прямоугольным полым валом
- Доступны выходные валы из нержавеющей стали
- Круглый вал (без шестерни) Типы
- Доступен электромагнитный тормоз
- Однофазный 110/115 В переменного тока или однофазный 220-230 В переменного тока
Трехфазные асинхронные двигатели переменного тока и мотор-редукторы
Асинхронные двигатели переменного тока оптимальны для однонаправленной и непрерывной работы, такой как конвейерная система. Все, что вам нужно, это подключить двигатель к сети переменного тока, и двигатель можно легко использовать.
- 6 Вт (1/125 л.с.) до 3 л.с.
- Мотор-редукторы с параллельным валом, прямоугольным сплошным валом, прямоугольным полым валом
- Круглый вал (без шестерни) Типы
- Доступен электромагнитный тормоз
- Трехфазный 200–230 В переменного тока или трехфазный 208/230/460 В переменного тока
- Инверторы продаются отдельно
Асинхронные двигатели переменного тока и мотор-редукторы
На следующем рисунке показана конструкция асинхронного двигателя переменного тока.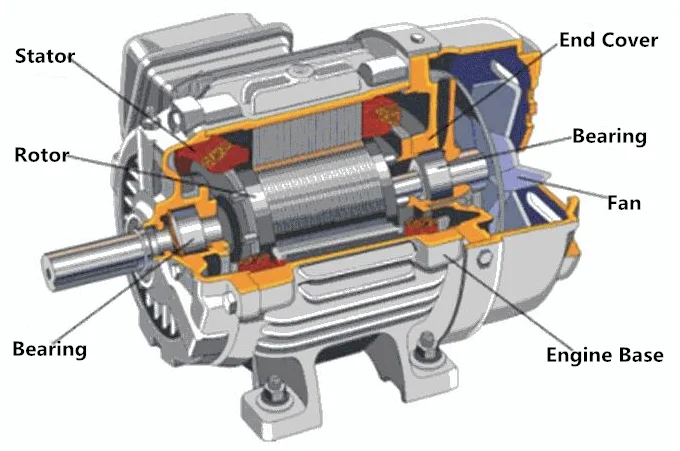
1. Фланцевый кронштейн Литой алюминиевый кронштейн с механической обработкой, запрессованный в корпус двигателя
2. Статор Состоит из сердечника статора из пластин электромагнитной стали и медной катушки с полиэфирным покрытием. и изоляционная пленка
3. Корпус двигателя Литой под давлением алюминий с механической обработкой внутри
4. Ротор Электромагнитные стальные пластины с литым под давлением алюминием
5. Выходной вал Доступны модели с круглым валом и с валом-шестерней. Металл, используемый в валу, — S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке.
6. Шариковый подшипник
7. Токоподводы Токоподводы с термостойким полиэтиленовым покрытием
8. Окраска Запекание из акриловой смолы или меламиновой смолы
— Torque Motors0018
На приведенном ниже рисунке показаны характеристики скорости и момента асинхронных двигателей.
Двигатель без нагрузки вращается со скоростью, близкой к синхронной. По мере увеличения нагрузки скорость двигателя падает до уровня (P), при котором достигается баланс между нагрузкой и крутящим моментом двигателя (Tp). Если нагрузка увеличивается дальше и достигает точки М, двигатель не может генерировать больший крутящий момент и останавливается в точке R.
Другими словами, двигатель может работать в стабильном диапазоне между M и O, в то время как диапазон между R и M подвержен нестабильности.
Асинхронные двигатели доступны двух типов: однофазные (с конденсатором) и трехфазные асинхронные двигатели. У однофазного двигателя пусковой момент обычно меньше рабочего момента, тогда как трехфазный двигатель имеет относительно больший пусковой момент.
Крутящий момент двигателя изменяется пропорционально примерно удвоенному напряжению питания.
Например, если 110 В подается на двигатель с номинальным напряжением 100 В, крутящий момент, создаваемый двигателем, увеличивается примерно до 120 %. В этом случае температура двигателя повысится и может превысить допустимый диапазон.
В этом случае температура двигателя повысится и может превысить допустимый диапазон.
Если 90 В подается на тот же двигатель, крутящий момент, создаваемый двигателем, уменьшается примерно до 80%. В этом случае двигатель может не работать с автоматическим оборудованием должным образом.
По вышеуказанным причинам напряжение источника питания должно поддерживаться в пределах ±10% от номинального напряжения. В противном случае, когда напряжение питания колеблется за пределами указанного выше диапазона, температура двигателя может подняться выше допустимого диапазона или крутящий момент двигателя может упасть, что приведет к нестабильной работе оборудования.
- Поиск по артикулу
- Слайд с содержанием
- Слайд с содержанием
Как работают асинхронные двигатели переменного тока?
Motors 101: Как работают асинхронные двигатели переменного тока?
[email protected] | Позвоните сегодня: 763-383-6936
Если вы когда-либо включали вентилятор в жаркий день или загружали белье в стиральную машину, вы лично сталкивались с асинхронным двигателем переменного тока. Это одни из самых универсальных и часто используемых двигателей в мире, а также один из многих типов электродвигателей, которые мы настраиваем в соответствии с вашими потребностями.
Это одни из самых универсальных и часто используемых двигателей в мире, а также один из многих типов электродвигателей, которые мы настраиваем в соответствии с вашими потребностями.
Несмотря на то, что конструкция асинхронных двигателей проста, принципы их работы требуют небольшого пояснения.
Асинхронные двигатели переменного тока: богатая история использования
История изобретения асинхронного двигателя насчитывает более 100 лет. Хотя несколько человек внесли свой вклад в его разработку, его изобретение часто приписывают Николе Тесле. Он был первым, кто подал заявку на патент в Соединенных Штатах в 1887 году.
В то же время Джордж Вестингауз разрабатывал систему получения электроэнергии от переменного тока, что имело решающее значение для успеха асинхронного двигателя. Westinghouse заключила контракт с Tesla на разработку двигателя, но только когда General Electric лицензировала и усовершенствовала конструкцию 10 лет спустя, родился двигатель, который мы используем сегодня.
Асинхронные двигатели переменного тока: богатая история использования
История изобретения асинхронного двигателя насчитывает более 100 лет. Хотя несколько человек внесли свой вклад в его разработку, его изобретение часто приписывают Николе Тесле. Он был первым, кто подал заявку на патент в Соединенных Штатах в 1887 году.
В то же время Джордж Вестингауз разрабатывал систему получения электроэнергии от переменного тока, что имело решающее значение для успеха асинхронного двигателя. Westinghouse заключила контракт с Tesla на разработку двигателя, но только когда General Electric лицензировала и усовершенствовала конструкцию 10 лет спустя, родился двигатель, который мы используем сегодня.
Две основные части: статор и ротор
Асинхронный двигатель переменного тока состоит из двух основных компонентов:
- Статор
- Ротор , камера, в которой вращается ротор. Статор создает магнитную силу через переменный ток, который «заставляет» ротор вращаться.

Статор
Статор образован кольцом электромагнитов. Он состоит из тонких стальных или железных слоев с прорезями, сложенных вместе в виде цилиндра. Медная проволока наматывается в чередующихся направлениях через внутреннюю часть цилиндра, создавая магнитные полюса.
Когда переменный ток протекает через эти проволочные катушки, они образуют пары чередующихся полюсов, один северный и один южный. Этот ток заставляет направленный поток и полярность полюсов прыгать между северным и южным полюсами с каждым полупериодом. Это приводит к переменному магнитному полю, которое вращается с единой силой.
Ротор
Ротор также состоит из группы электромагнитов, расположенных вокруг цилиндра. Этот похожий на ось аппарат прижимается внутри статора. Магнитные поля, индуцированные внутри ротора, притягиваются к магнитному полю, создаваемому статором, следуя за ним по мере его вращения с каждым полупериодом переменного тока.
Этот тип двигателя называется асинхронным, потому что магнитное поле, создаваемое в статоре, индуцирует магнитное поле в роторе.