Содержание
Асинхронный двигатель — принцип работы и устройство
Асинхронный двигатель
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство
На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой«. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье — асинхронный двигатель с фазным ротором.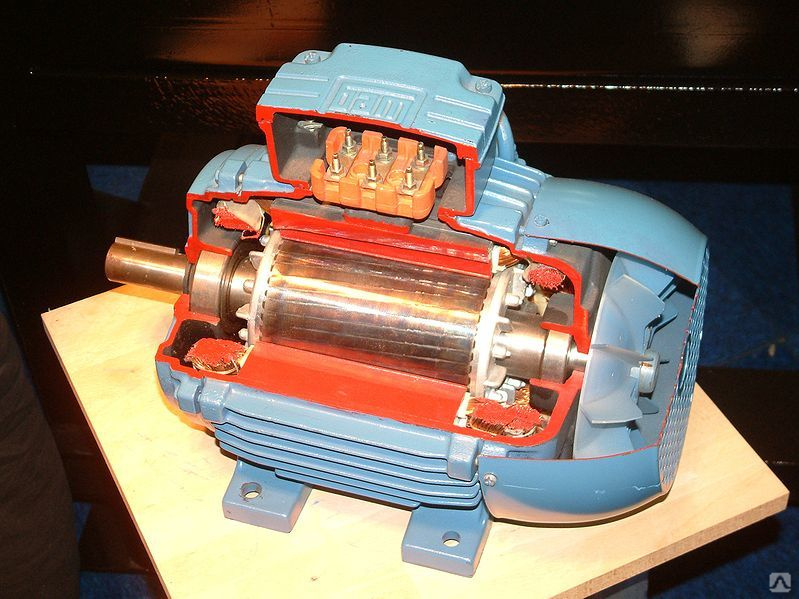
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s — это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении.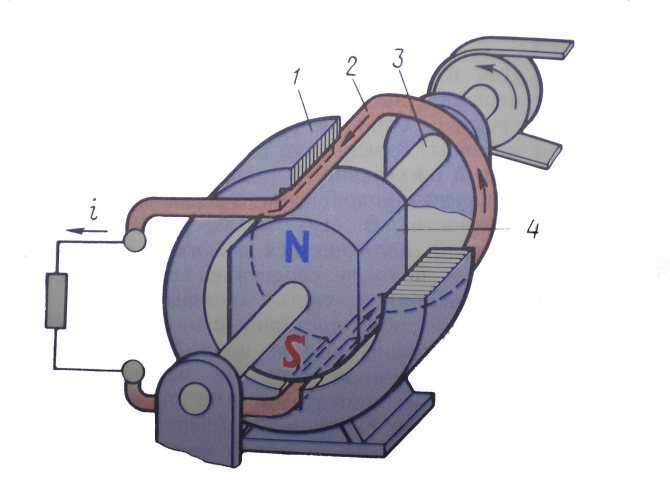
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
Рекомендуем к прочтению — однофазный асинхронный двигатель.
Преимущества и недостатки асинхронного двигателя
Подавляющее большинство электродвигателей, используемых в промышленности – асинхронные двигатели с короткозамкнутым ротором. В новом оборудовании их доля составляет более 95%, остальное – серводвигатели, шаговые двигатели, щеточные двигатели постоянного тока и некоторые другие специфические виды приводов.
Преимущества асинхронного двигателя
Конструкция. По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым.
Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым.
Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя. Достаточно обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет работать.
Эксплуатация. Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет.
Недостатки асинхронных двигателей
Скорость вращения ротора. Скорость вращения вала двигателя зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток статора.
Это можно считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток.
Кроме того, в современном оборудовании управление скоростью реализуется за счет преобразователей частоты.
Скольжение. Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
При необходимости скольжение можно скомпенсировать, а скорость вращения сделать независимой от нагрузки при помощи преобразователя частоты.
Величина напряжения питания. В сырых и влажных помещениях, где действуют повышенные требования к электробезопасности, применение асинхронного электродвигателя может быть невозможным. Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы.
Чувствительность к напряжению питания. При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться. Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения.
При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой.
Пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую.
Чаще всего для понижения пускового тока применяют схему «Звезда-Треугольник», устройства плавного пуска и преобразователи частоты. Также можно использовать асинхронные двигатели с фазным ротором.
Пусковой момент. В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени.
При использовании частотного преобразователя момент при пуске и на низких частотах может быть увеличен за счет повышения напряжения.
Вывод
Плюсы асинхронных двигателей значительно перевешивают минусы. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска.
Другие полезные материалы:
Способы защиты электродвигателей
Когда не нужен плавный пуск
Когда нецелесообразно ремонтировать двигатель
Асинхронный и синхронный электродвигатель в чем разница
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. Электродвигателем называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это постоянные магниты. Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, – все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами реактивной мощности. Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Электродвигатели бывают двух основных типов — синхронные и асинхронные. Что представляют собой те и другие?
Что представляет собой синхронный двигатель?
К синхронным принято относить электродвигатели, которые функционируют на переменном токе и имеют ротор с частотой вращения, совпадающей с частотой оборотов магнитного поля в конструкции агрегата.
Ключевые элементы синхронного электродвигателя:
Первый элемент агрегата располагается на статоре. Индуктор размещается на роторе, который отделен от статора воздушной прослойкой. Структура якоря представлена обмоткой (одной или несколькими). Токи, которые подаются в соответствующий элемент двигателя, формируют магнитное поле, вращающееся с заданной частотой и взаимодействующее с полем индуктора. Индуктор включает 2 полюса — в виде постоянных магнитов.
Индуктор включает 2 полюса — в виде постоянных магнитов.
Синхронный агрегат может функционировать в двух режимах:
- как собственно электродвигатель;
- как генератор.
Первый режим работы предполагает взаимодействие магнитного поля, формирующегося на якоре, и поля, которое образуется на полюсах индуктора. Синхронный двигатель в режиме генератора функционирует за счет электромагнитной индукции: в процессе вращения ротора магнитное поле, которое формируется на обмотке, по очереди взаимодействует с фазами обмотки на статоре, вследствие чего образуется электродвижущая сила.
Что представляет собой асинхронный электродвигатель?
К асинхронным принято относить электродвигатели, в которых частота вращения одного из ключевых элементов — ротора — не совпадает с частотой оборотов магнитного поля, формирующегося током, который возникает на обмотке статора. Асинхронные агрегаты иногда именуются индукционными. Это обусловлено тем, что в обмотке ротора осуществляется индуцирование тока при воздействии магнитного поля статора.
В конструкции асинхронного электродвигателя присутствуют статор и ротор, которые разделены воздушной прослойкой. Основные активные элементы агрегата:
- обмотка;
- магнитопровод.
Важную роль в функционировании асинхронного двигателя играют дополнительные конструктивные элементы, которые обеспечивают прочность, охлаждение и устойчивость работы агрегата.
Сравнение
Главное отличие синхронного двигателя от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя одинаковые. В асинхронной машине — разные.
Можно отметить, что электродвигатели второго типа в целом более распространены, чем первые. При этом асинхронные агрегаты чаще всего представлены в разновидности, в которой инсталлирован короткозамкнутый ротор. Данные устройства имеют ряд важнейших преимуществ перед электродвигателями иных категорий. А именно:
- простота конструкции, надежность;
- относительно невысокая себестоимость производства, эксплуатации;
- способность функционирования при задействовании имеющихся ресурсов сети без подключения преобразователей.


Вместе с тем асинхронные машины с короткозамкнутым ротором обладают и рядом недостатков. А именно:
- наличие малого пускового момента;
- наличие большого пускового тока;
- пониженный коэффициент мощности;
- низкая управляемость с точки зрения регулирования скорости;
- зависимость максимальной скорости от частоты электрической сети;
- электромагнитный момент в асинхронных двигателях рассматриваемого типа характеризуется сильной чувствительностью к снижению напряжения в сети.
В свою очередь, у синхронных агрегатов также есть неоспоримые достоинства. К таковым можно отнести:
- относительно невысокую чувствительность к перепадам напряжения в сети;
- стабильность вращения вне зависимости от нагрузки на ротор.
Есть у синхронных двигателей и недостатки:
- относительная сложность конструкции;
- сложность запуска ротора в ход.
Отмеченные особенности работы синхронных и асинхронных агрегатов делают оптимальным использование первых в случае, если требуемая мощность двигателя в системе (например, как части инфраструктуры фабричной линии) должна составлять порядка 100 кВт и более. В остальных случаях задействование асинхронных машин, как правило, становится более предпочтительным.
В остальных случаях задействование асинхронных машин, как правило, становится более предпочтительным.
Рассмотрев, в чем разница между синхронным и асинхронным двигателем, отразим выводы в таблице.
Электродвигатели можно разделить на две основные категории – синхронные и асинхронные (индукционные) двигатели. Эти два вида довольно сильно отличаются друг от друга. Разница уже видна в самих названиях. Отличить агрегаты можно по выбитому на шильдике количеству оборотов (если там не указан тип мотора), у ассинхронного мотора неокруглённое число (например, 950 об/мин), у синхронного округлённое (1000 об/мин).
Есть и другие важные различия, в этой статье мы рассмотрим наиболее показательные из них: конструктивные, рабочие и ценовые.
Различия в работе и стоимости
Любой двигатель состоит из двух элементов: неподвижного и вращающегося. Статор имеет осевые прорези — пазы, на дно которых укладываются токонесущие медные или алюминиевые проводки. У электродвигателя на валу крепится ротор с обмоткой возбуждения.
Принципиальным отличием между синхронными и асинхронными двигателями являются роторы, точнее, их исполнение.
У синхронных моделей при малых мощностях они представляют собой постоянные магниты.
Переменное напряжение подаётся на обмотку статора, ротор подключается к постоянному источнику питания. Проходящий по обмотке возбуждения постоянный ток наводит магнитное поле статора. Крутящий момент создаётся из-за угла запаздывания между полями. Ротор имеет такую же скорость, как и магнитное поле статора.
Агрегаты используются на практике и как генераторы и как двигатели.
Асинхронные модели – это достаточно недорогие двигатели, которые применяются часто и всюду. Они проще в конструктивном плане, несмотря на то, что неподвижные части в принципе у всех моторов похожи.
По обмотке статора пропускается переменный электроток, который взаимодействует с роторной обмоткой. Два поля вращаются с одинаковой скоростью в одном направлении, но не могут быть равными, иначе бы не создавалась индуцированная ЭДС и, тем более крутящийся момент. Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Два поля вращаются с одинаковой скоростью в одном направлении, но не могут быть равными, иначе бы не создавалась индуцированная ЭДС и, тем более крутящийся момент. Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Скорость вращения ротора не совпадает со скоростью магнитного поля, она всегда меньше. Таким образом, ротор пытается догнать скорость вращающегося магнитного поля и уменьшить относительную скорость.
Основные достоинства и недостатки
- Асинхронные агрегаты не требуют какого-либо дополнительного источника питания. Синхронным необходим дополнительный источник постоянного тока для подачи напряжения на обмотки.
- Синхронники обладают относительно невысокой чувствительностью к перепадам сетевого напряжения и стабильностью вращения вне зависимости от нагрузки.
- Индукционные двигатели не требуют наличия контактных колец, за исключением двигателей с фазным ротором, которые их имеют для плавного пуска или регулирования скорости. В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
- Синхронники нуждаются во вспомогательных пусковых механизмах, так как не обладают функцией самопуска. Для индукционных электродвигателей, имеющих собственные пусковые моменты, такой механизм не требуется.

Какой агрегат лучше
В заключение нужно отметить, что говорить, якобы один мотор лучше другого, нельзя. Однако, асинхронные модели надежнее в эксплуатации, отличаются простотой конструкции. Если агрегаты не перегружать, то их длительным сроком службы пользователь может остаться довольным.
Достоинством синхронной модели является то, что можно легко установить высокий коэффициент мощности. Поэтому модель является гораздо более эффективной, но по цене она будет соответственно дороже. Машины применяются в системах с требуемой мощностью 100 кВт и более.
Машины применяются в системах с требуемой мощностью 100 кВт и более.
Сравнение асинхронного двигателя и синхронного двигателя
При выборе бесщеточного электродвигателя для своих разработок инженеры имеют несколько вариантов. Неправильный выбор может привести к провалу проекта не только на этапе разработки – испытания, но и после выхода на рынок, что крайне не желательно. Для облегчения работы инженеров мы сделаем краткое описание преимуществ и недостатков четырех наиболее популярных видов бесщеточных электрических машин: асинхронный электродвигатель (АД), двигатель с постоянными магнитами (ПМ), синхронные реактивные электродвигатели (СРД), вентильные реактивные электродвигатели (ВРД).
Асинхронные электродвигатели
Асинхронные электрические машины смело можно назвать костяком современной промышленности. Благодаря своей простоте, относительно низкой стоимости, минимальным затратам на обслуживание, а также возможности работать напрямую от промышленных сетей переменного тока, они прочно въелись в современные производственные процессы.
Сегодня существует множество различных преобразователей частоты с самыми различными алгоритмами управления, которые позволяют регулировать скорость и момент асинхронной машины в большом диапазоне с хорошей точностью. Все эти свойства позволили асинхронной машине значительно потеснить с рынка традиционные коллекторные двигатели. Вот почему регулируемые асинхронные электродвигатели (АД) легко встретить в самых различных устройствах и механизмах, таких как тяговый асинхронный электропривод, электроприводы стиральных машин, вентиляторов, компрессоров, воздуходувок, кранов, лифтов и многом другом электрооборудовании.
АД создает вращающий момент за счет взаимодействия тока статора с индуцированным током ротора. Но токи ротора нагревают его, что приводит к нагреванию подшипников и снижению их срока службы. Замена традиционной алюминиевой обмотки на медную не устраняет проблему, а приводит к удорожанию электрической машины и может накладывать ограничения на прямой ее пуск.
Статор асинхронной машины имеет довольно большую постоянную времени, что негативно сказывается на реагировании системы управления при изменении скорости или нагрузки. К сожалению, потери связанные с намагничиванием не зависят от нагрузки машины, что снижает КПД АД при работе с малыми нагрузками. Автоматическое уменьшение потока статора возможно использовать для решения данной проблемы — для этого необходим быстрый отклик системы управления на изменения нагрузки, но как показывает практика, такая коррекция не существенно увеличивает КПД.
К сожалению, потери связанные с намагничиванием не зависят от нагрузки машины, что снижает КПД АД при работе с малыми нагрузками. Автоматическое уменьшение потока статора возможно использовать для решения данной проблемы — для этого необходим быстрый отклик системы управления на изменения нагрузки, но как показывает практика, такая коррекция не существенно увеличивает КПД.
На скоростях превышающих номинальную поле статора ослабевает из-за ограниченного напряжения питания. Вращающий момент начинает падать, так как для его поддержания будет требоваться больший ток ротора. Следовательно, управляемые АД ограничиваются диапазоном скорости для поддержания постоянной мощности примерно 2:1.
Механизмы, которые требуют более широкого диапазона регулирования, такие как: станки с ЧПУ, тяговый электропривод, могут снабжаться асинхронными электродвигателями специального исполнения, где для увеличения диапазона регулирования могут уменьшать количество витков обмотки, снижая при этом значения крутящего момента на низких скоростях. Также возможен вариант с использованием более высоких токов статора, что требует установки более дорогих и менее эффективных инверторов.
Также возможен вариант с использованием более высоких токов статора, что требует установки более дорогих и менее эффективных инверторов.
Немаловажным фактором при работе АД является качество питающего напряжения, ведь максимальный КПД электродвигатель имеет при синусоидальной форме питающего напряжения. В реальности преобразователь частоты обеспечивает импульсное напряжение и ток, похожий на синусоидальный. Проектировщикам стоит иметь ввиду, что КПД системы ПЧ-АД будет меньше, чем сумма КПД преобразователя и двигателя в отдельности. Улучшения качества выходного тока и напряжения повышают увеличением несущей частоты преобразователя, это приводит к снижению потерь в двигателе, но при этом возрастают потери в самом инверторе. Одним из популярных решений, особенно для промышленных мощных электроприводов, является установка фильтров между преобразователем частоты и асинхронной машиной. Однако это приводит к увеличению стоимости, габаритов установки, а также к дополнительным потерям мощности.
Еще одним недостатком асинхронных машин переменного тока является то, что их обмотки распределены на протяжении многих пазов в сердечнике статора. Это приводит к появлению длинных концевых поворотов, которые увеличивают габариты и потери энергии в машине. Эти вопросы исключены в стандартах IE4 или классах IE4. В настоящее время европейский стандарт (IEC60034) специально исключает любые двигатели, требующие электронного управления.
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами (английский PMMS) создают крутящий момент благодаря взаимодействию токов статора с постоянными магнитами внутри или снаружи ротора. Электродвигатели с поверхностным расположением магнитов являются маломощными и используются в IT оборудовании, офисной технике, автомобильном транспорте. Электродвигатели со встроенными магнитами (IPM) распространены в мощных машинах, используемых в промышленности.
Двигатели с постоянными магнитами (ПМ) могут использовать концентрированные (с коротким шагом) обмотки, если пульсации вращающего момента не являются критичными, но распределенные обмотки являются нормой в ПМ.
Поскольку PMMS не имеют механических коммутаторов, то преобразователи играют важную роль в процессе контроля тока обмотки.
В отличии от других видов бесщеточных электродвигателей, PMMS не требуют тока возбуждения, необходимого для поддерживания магнитного потока ротора. Следовательно, они способны обеспечить максимальный крутящий момент на единицу объема и могут быть лучшим выбором, если требования к массо-габаритным показателям выходят на первый план.
К наибольшим недостаткам таких машин можно отнести их очень высокую стоимость. Высокопроизводительные электрические машины с постоянными магнитами используют такие материалы как неодим и диспрозий. Данные материалы относятся к редкоземельным и добываются в геополитически нестабильных странах, что приводит к высоким и нестабильным ценам.
Также постоянные магниты добавляют производительности при работе на низких скоростях, но являются «Ахиллесовой пятой» при работе на высоких. Например, при увеличении скорости машины с постоянными магнитами возрастет и ее ЭДС, постепенно приближаясь к напряжению питания инвертора, при этом снизить поток машины не представляется возможным. Как правило, номинальная скорость является максимальной для ПМ с поверхностно-магнитной конструкцией при номинальном напряжении питания.
Как правило, номинальная скорость является максимальной для ПМ с поверхностно-магнитной конструкцией при номинальном напряжении питания.
На скоростях больше номинальной, для электродвигателей с постоянными магнитами типа IPM, используют подавление активного поля, что достигается путем манипуляций с током статора при помощи преобразователя. Диапазон скорости, в котором двигатель может надежно работать, ограничен примерно 4:1.
Необходимость ослабления поля в зависимости от скорости приводит к потерям независящим от вращающего момента. Это снижает КПД на высоких скоростях, и особенно при малых нагрузках. Этот эффект наиболее актуален при использовании ПМ в качестве тягового автомобильного электропривода, где высокая скорость на автостраде неизбежно влечет за собой необходимость ослабления магнитного поля. Часто разработчики выступают за применение двигателей с постоянными магнитами в качестве тяговых электроприводов электромобилей, однако их эффективность при работе в данной системе довольно сомнительна, особенно после вычислений связанных с реальными циклами вождения. Некоторые производители электромобилей сделали переход от ПМ к асинхронным электродвигателям в качестве тяговых.
Некоторые производители электромобилей сделали переход от ПМ к асинхронным электродвигателям в качестве тяговых.
Также к существенным недостаткам электродвигателей с постоянными магнитами можно отнести их трудно управляемость в условиях неисправности из-за присущей им противо-ЭДС. Ток будет протекать в обмотках, даже при выключенном преобразователе, пока вращается машина. Это может приводить к перегреву и другим неприятным последствиям. Потеря контроля над ослабленным магнитным полем, например при аварийном отключении источника питания, может привести к неподконтрольной генерации электрической энергии и, как следствие, к опасному возрастанию напряжения.
Рабочие температуры – это еще одна не самая сильная сторона ПМ, кроме машин, изготовленных из самарий-кобальта. Также большие броски тока инвертора могут привести к размагничиванию.
Максимальная скорость PMMS ограничивается механической прочностью крепления магнитов. В случае повреждения ПМ его ремонт, как правило, осуществляется на заводе изготовителе, так как извлечение и безопасная обработка ротора практически невозможна в обычных условиях. И, наконец, утилизация. Да это тоже доставляет немного хлопот после окончания срока службы машины, но наличие редкоземельных материалов в этой машине должно упростить этот процесс в ближайшем будущем.
И, наконец, утилизация. Да это тоже доставляет немного хлопот после окончания срока службы машины, но наличие редкоземельных материалов в этой машине должно упростить этот процесс в ближайшем будущем.
Несмотря на перечисленные выше недостатки, электродвигатели с постоянными магнитами являются непревзойденными с точки зрения низкоскоростных мелкогабаритных механизмов и устройств.
Реактивные синхронные двигатели
Синхронные реактивные электродвигатели всегда работают только в паре с преобразователем частоты и используют тот же тип управления потоком статора, что и обычный АД. Роторы данных машин изготавливают из тонколистной электротехнической стали с пробитыми пазами таким образом, что бы они намагничивались с одной стороны меньше, чем с другой. Стремление магнитного поля ротора «соединится» с вращающимся магнитным потоком статора и создает вращающий момент.
Основным плюсом реактивных синхронных электродвигателей являются незначительные потери в роторе. Таким образом, хорошо спроектированная и работающая с правильно подобранным алгоритмом управления синхронная реактивная машина вполне способна соответствовать европейским стандартам премиум класса IE4 и NEMA, не используя при этом постоянных магнитов. Снижения тепловых потерь в роторе повышает крутящий момент и увеличивает плотность мощности, по сравнению с асинхронными машинами. Эти двигатели имеют низкий уровень шума благодаря низкому уровню пульсаций момента и вибраций.
Снижения тепловых потерь в роторе повышает крутящий момент и увеличивает плотность мощности, по сравнению с асинхронными машинами. Эти двигатели имеют низкий уровень шума благодаря низкому уровню пульсаций момента и вибраций.
Основным недостатком является низкий коэффициент мощности по сравнению с асинхронной машиной, что приводит к большей потребляемой мощности из сети. Это увеличивает затраты и ставит перед инженером сложную задачу, стоит ли применять реактивную машину или нет для конкретной системы?
Сложность в изготовлении ротора и его хрупкость делает невозможным применение реактивных электродвигателей для высокоскоростных операций.
Синхронные реактивные машины хорошо подходят для широкого спектра промышленных применений, которые не требуют больших перегрузок или высоких скоростей вращения, а также все чаще применяются для частотно-регулируемых насосов из-за повышенной их эффективности.
Вентильные реактивные электродвигатели
Вентильный реактивный двигатель (с английского SRM) создает вращающий момент за счет притягивания магнитных полей зубцов ротора к магнитному полю статора. Вентильные реактивные двигатели (ВРД) имеют относительно небольшое количество полюсов обмотки статора. Ротор имеет зубчатый профиль, что упрощает его конструкцию и улучшает создаваемое магнитное поле, в отличии от реактивных синхронных машин. В отличии от синхронных реактивных двигателей (СРД), ВРД используют импульсное возбуждение постоянного тока, что требует обязательное наличие специального преобразователя для их работы.
Вентильные реактивные двигатели (ВРД) имеют относительно небольшое количество полюсов обмотки статора. Ротор имеет зубчатый профиль, что упрощает его конструкцию и улучшает создаваемое магнитное поле, в отличии от реактивных синхронных машин. В отличии от синхронных реактивных двигателей (СРД), ВРД используют импульсное возбуждение постоянного тока, что требует обязательное наличие специального преобразователя для их работы.
Для поддержания магнитного поля в ВРД необходимы токи возбуждения, что уменьшает плотность мощности по сравнению с электрическими машинами с постоянными магнитами (ПМ). Однако они все же имеют габаритные размеры меньшие, чем обычные АД.
Основным преимуществом вентильных реактивных машин является то, что ослабления магнитного поля происходит естественным образом при снижении тока возбуждения. Это свойство дает им большое преимущество в диапазоне регулирования при скоростях выше номинальной (диапазон устойчивой работы может достигать 10:1). Высокая эффективность присутствует у таких машин при работе на высоких скоростях и с малыми нагрузками. Также ВРД способны обеспечить удивительно постоянную эффективность в довольно широком диапазоне регулирования.
Также ВРД способны обеспечить удивительно постоянную эффективность в довольно широком диапазоне регулирования.
Вентильные реактивные машины обладают также довольно хорошей отказоустойчивостью. Без постоянных магнитов эти машины не генерируют неуправляемый ток и момент при неисправностях, а независимость фаз ВРД позволяет им работать с уменьшенной нагрузкой, но с повышенными пульсациями момента при выходе из строя какой-то из фаз. Это свойство может быть полезно, если проектировщики хотят повышенной надежности разрабатываемой системы.
Простая конструкция ВРД делает его прочным и недорогим в изготовлении. При его сборке не используются дорогие материалы, а ротор из нелегированной стали отлично подходит для суровых климатических условий и высоких скоростей вращения.
ВРД имеет коэффициент мощности меньший, чем ПМ или АД, но его преобразователю не нужно создавать выходное напряжение синусоидальной формы для эффективной работы машины, соответственно такие инверторы имеют меньшие частоты коммутации. Как следствие – меньшие потери в инверторе.
Основными недостатками вентильных реактивных машин являются наличие акустических шумов и вибрации. Но с этими недостатками довольно хорошо борются путем более тщательного проектирования механической части машины, улучшения электронного управления, а также механическое объединение двигатель – рабочий орган.
ВРД хорошо подходят для широкого спектра применения и их все чаще используют для обработки сверхпрочных материалов из-за большой перегрузочной способности и большого диапазона регулирования скоростей. Большая перегрузочная способность делает их все более привлекательными для использования в качестве тяговых электроприводов современных электромобилей. Также ВРД получили широкое распространение и в электробытовой технике.
В асинхронном двигателе ротор движется «сам по себе». В нем изначально нет ни магнитного поля, на него не подается никакого электрического напряжения. Он даже не обязан быть сделанным из железа — магнитного металла. Ну а вот, поди ж ты, стоит подключить к двигателю трехфазное напряжение, и ротор закрутился. Безо всякого подталкивания. Но по-своему.
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может. Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции. А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.
То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать. Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре. Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.
Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.
1 – ротор,
2 – коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Отличия синхронного и асинхронного двигателей ясны из их названий. Собственно, плюсы имеют и тот, и другой вариант конструкции. Ниже перечислены плюсы, которыми отличаются оба двигателя — синхронный и асинхронный.
Асинхронный двигатель отличается от синхронного следующими параметрами:
- простота конструкции и невысокая стоимость;
- нет скользящих контактов, надежность в эксплуатации;
- напряжение прикладывается к неподвижным катушкам статора;
- ротор очень прост по конструкции;
- при запуске и разгоне постепенно наращивает мощность;
- возможность реверсировать направление вращения, просто поменяв местами две питающих фазы;
- при остановке движения (слишком большая механическая нагрузка на вал ротора) никакой аварии не происходит, может произойти перегрев беличьей клетки.
Отличия синхронного двигателя от асинхронного заключаются в следующем:
- стабильная скорость вращения вне зависимости от нагрузки на вал;
- невысокая чувствительность к перепадам напряжения в сети;
- при уменьшении механической нагрузки способен по инерции работать как генератор, не забирая энергию, а отдавая ее в сеть;
- высокий КПД;
- способен компенсировать реактивную мощность сети.
Но у каждого имеются и присущие только ему недостатки.
Асинхронный имеет следующие отрицательные черты:
- трудность регулировки частоты вращения;
- невысокая частота вращения;
- зависимость отставания частоты вращения от нагрузки на ось;
- при работе ротор нагревается за счет короткозамкнутых токов — требуется дополнительное охлаждение.
Недостатки синхронного двигателя:
- сложнее по конструкции;
- в некоторых конструкциях для проводки тока возбуждения в обмотки ротора используется коллектор, как в двигателе постоянного тока;
- труднее запускается.
Несмотря на различия, оба электрических двигателя нашли себе применение в технике и используются в самых разных исполнениях и размерах.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. Электродвигателем называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это постоянные магниты. Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами реактивной мощности. Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Разница между синхронным и асинхронным двигателем
Разница между синхронным и асинхронным двигателем объясняется с учетом таких факторов, как его тип, скольжение, потребность в дополнительном источнике питания, требование к контактному кольцу и щеткам, их стоимость, эффективность, коэффициент мощности, токоподвод, скорость, самозапуск, влияние на крутящий момент, поскольку изменения напряжения, их рабочей скорости и различных применений синхронного и асинхронного двигателя. Советуем вам сайт компании zemchic.ru, перейдя по ссылке далее https://zemchic.ru/item/instrument_obmotchika_remontnika вы сможете купить инструменты обмотчика-ремонтника по выгодной цене!
Различия между синхронным и асинхронным двигателем описаны ниже в табличной форме.
| ОСНОВА | СИНХРОННЫЙ МОТОР | АСИНХРОННЫЙ МОТОР |
|---|---|---|
| Определение | Синхронный двигатель — это машина, скорость вращения которой и скорость магнитного поля статора равны. N = NS = 120f / P | Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей синхронной. N <NS |
| Тип | Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с переключаемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. | Асинхронный двигатель переменного тока известен как асинхронный двигатель. |
| слип | Не имеет скольжения. Значение скольжения равно нулю. | Имейте скольжение, поэтому значение скольжения не равно нулю. |
| Дополнительный источник питания | Требуется дополнительный источник питания постоянного тока для первоначального вращения ротора вблизи синхронной скорости. | Не требует никакого дополнительного исходного источника. |
| Кольцо скольжения и щетки | Требуется скользящее кольцо и щетки | Кольцо скольжения и щетки не требуются. |
| Стоимость | Синхронный двигатель является дорогостоящим по сравнению с асинхронным двигателем | Дешевле |
| КПД | КПД выше, чем у асинхронного двигателя. | Менее эффективны |
| Фактор силы | Изменяя возбуждение, коэффициент мощности можно соответственно отрегулировать как отставание, опережение или единица. | Асинхронный двигатель работает только с запаздывающим коэффициентом мощности. |
| Ток питания | Ток подается на ротор синхронного двигателя | Ротор асинхронного двигателя не требует тока. |
| скорость | Скорость двигателя не зависит от изменения нагрузки. Это постоянно. | Скорость асинхронного двигателя уменьшается с увеличением нагрузки. |
| Самостоятельный запуск | Синхронный двигатель не запускается самостоятельно | Это само начало |
| Влияние крутящего момента | Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя | Изменение приложенного напряжения влияет на крутящий момент асинхронного двигателя |
| Рабочая скорость | Они работают плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин. | Выше 600 об / мин скорость работы двигателя превосходна. |
| Приложения | Синхронные двигатели используются на электростанциях, в обрабатывающей промышленности и т. Д., А также в качестве регулятора напряжения. | Используется в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. так далее |
Синхронный двигатель — это двигатель, который работает с синхронной скоростью, то есть скорость вращения ротора равна частоте вращения статора двигателя. Это следует соотношению N = N S = 120f / P, где N — скорость ротора, а Ns — синхронная скорость.
Асинхронный двигатель — это асинхронный двигатель переменного тока. Ротор асинхронного двигателя вращается со скоростью меньше, чем синхронная скорость, т.е. N <N S
- Синхронный двигатель — это машина, скорость вращения которой и скорость магнитного поля статора равны. Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей синхронной.
- Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с переключаемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. Асинхронный двигатель переменного тока известен как асинхронный двигатель.
- Синхронный двигатель не имеет скольжения. Значение скольжения равно нулю. Асинхронный двигатель имеет проскальзывание, поэтому величина проскальзывания не равна нулю.
- Синхронный двигатель требует дополнительного источника питания постоянного тока, чтобы первоначально вращать ротор близко к синхронной скорости. Асинхронный двигатель не требует дополнительного источника запуска.
- Кольцо скольжения и щетки требуются в синхронном двигателе, тогда как асинхронный двигатель не требует кольца скольжения и щеток. Только для асинхронного двигателя намоточного типа требуются контактное кольцо и щетки.
- Синхронный двигатель является дорогостоящим по сравнению с асинхронным двигателем.
- КПД синхронного двигателя выше, чем асинхронного двигателя.
- Изменяя возбуждение, коэффициент мощности Синхронного двигателя можно соответствующим образом отрегулировать как отстающий, опережающий или единичный, тогда как асинхронный двигатель работает только с запаздывающим коэффициентом мощности.
- Ток подается на ротор синхронного двигателя. Ротор асинхронного двигателя не требует тока.
- Скорость Синхронного двигателя не зависит от изменения нагрузки. Это постоянно. Скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель не запускается самостоятельно, тогда как асинхронный запускается самостоятельно.
- Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, тогда как оно влияет на крутящий момент асинхронного двигателя.
- Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин, тогда как скорость выше 600 об / мин. Асинхронный двигатель работает превосходно. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. так далее
- Различные применения Синхронного двигателя заключаются в том, что он используется на электростанциях, в обрабатывающей промышленности и т. Д. Он также используется в качестве регулятора напряжения.
Преобразователь частоты для асинхронного и синхронного двигателя
Данная политика конфиденциальности относится к сайту под доменным именем instart-info. ru. Эта страница содержит сведения о том, какую информацию мы (администрация сайта) или третьи лица могут получать, когда вы пользуетесь нашим сайтом.
Данные, собираемые при посещении сайта
Персональные данные
Персональные данные при посещении сайта передаются пользователем добровольно, к ним могут относиться: имя, фамилия, отчество, номера телефонов, адреса электронной почты, адреса для доставки товаров или оказания услуг, реквизиты компании, которую представляет пользователь, должность в компании, которую представляет пользователь, аккаунты в социальных сетях; поля форм могут запрашивать и иные данные.
Эти данные собираются в целях оказания услуг или продажи товаров, связи с пользователем или иной активности пользователя на сайте, а также, чтобы отправлять пользователям информацию, которую они согласились получать.
Мы не проверяем достоверность оставляемых данных, однако не гарантируем качественного исполнения заказов или обратной связи с нами при некорректных данных.
Данные собираются имеющимися на сайте формами для заполнения (например, регистрации, оформления заказа, подписки, оставления отзыва, обратной связи и иными).
Формы, установленные на сайте, могут передавать данные как напрямую на сайт, так и на сайты сторонних организаций (скрипты сервисов сторонних организаций).
Также данные могут собираться через технологию cookies (куки) как непосредственно сайтом, так и скриптами сервисов сторонних организаций. Эти данные собираются автоматически, отправку этих данных можно запретить, отключив cookies (куки) в браузере, в котором открывается сайт.
Не персональные данные
Кроме персональных данных при посещении сайта собираются не персональные данные, их сбор происходит автоматически веб-сервером, на котором расположен сайт, средствами CMS (системы управления сайтом), скриптами сторонних организаций, установленными на сайте. К данным, собираемым автоматически, относятся: IP адрес и страна его регистрации, имя домена, с которого вы к нам пришли, переходы посетителей с одной страницы сайта на другую, информация, которую ваш браузер предоставляет добровольно при посещении сайта, cookies (куки), фиксируются посещения, иные данные, собираемые счетчиками аналитики сторонних организаций, установленными на сайте.
Эти данные носят неперсонифицированный характер и направлены на улучшение обслуживания клиентов, улучшения удобства использования сайта, анализа посещаемости.
Предоставление данных третьим лицам
Мы не раскрываем личную информацию пользователей компаниям, организациям и частным лицам, не связанным с нами. Исключение составляют случаи, перечисленные ниже.
Данные пользователей в общем доступе
Персональные данные пользователя могут публиковаться в общем доступе в соответствии с функционалом сайта, например, при оставлении отзывов, может публиковаться указанное пользователем имя, такая активность на сайте является добровольной, и пользователь своими действиями дает согласие на такую публикацию.
По требованию закона
Информация может быть раскрыта в целях воспрепятствования мошенничеству или иным противоправным действиям; по требованию законодательства и в иных случаях, предусмотренных законом.
Для оказания услуг, выполнения обязательств
Пользователь соглашается с тем, что персональная информация может быть передана третьим лицам в целях оказания заказанных на сайте услуг, выполнении иных обязательств перед пользователем. К таким лицам, например, относятся курьерская служба, почтовые службы, службы грузоперевозок и иные.
Сервисам сторонних организаций, установленным на сайте
На сайте могут быть установлены формы, собирающие персональную информацию других организаций, в этом случае сбор, хранение и защита персональной информации пользователя осуществляется сторонними организациями в соответствии с их политикой конфиденциальности.
Сбор, хранение и защита полученной от сторонней организации информации осуществляется в соответствии с настоящей политикой конфиденциальности.
Как мы защищаем вашу информацию
Мы принимаем соответствующие меры безопасности по сбору, хранению и обработке собранных данных для защиты их от несанкционированного доступа, изменения, раскрытия или уничтожения, ограничиваем нашим сотрудникам, подрядчикам и агентам доступ к персональным данным, постоянно совершенствуем способы сбора, хранения и обработки данных, включая физические меры безопасности, для противодействия несанкционированному доступу к нашим системам.
Ваше согласие с этими условиями
Используя этот сайт, вы выражаете свое согласие с этой политикой конфиденциальности. Если вы не согласны с этой политикой, пожалуйста, не используйте наш сайт. Ваше дальнейшее использование сайта после внесения изменений в настоящую политику будет рассматриваться как ваше согласие с этими изменениями.
Отказ от ответственности
Политика конфиденциальности не распространяется ни на какие другие сайты и не применима к веб-сайтам третьих лиц, которые могут содержать упоминание о нашем сайте и с которых могут делаться ссылки на сайт, а также ссылки с этого сайта на другие сайты сети Интернет. Мы не несем ответственности за действия других веб-сайтов.
Изменения в политике конфиденциальности
Мы имеем право по своему усмотрению обновлять данную политику конфиденциальности в любое время. В этом случае мы опубликуем уведомление на главной странице нашего сайта. Мы рекомендуем пользователям регулярно проверять эту страницу для того, чтобы быть в курсе любых изменений о том, как мы защищаем информацию пользователях, которую мы собираем. Используя сайт, вы соглашаетесь с принятием на себя ответственности за периодическое ознакомление с политикой конфиденциальности и изменениями в ней.
Как с нами связаться
Если у вас есть какие-либо вопросы о политике конфиденциальности, использованию сайта или иным вопросам, связанным с сайтом, свяжитесь с нами:
8 800 222 00 21
СИНХРОННЫЙ ДВИГАТЕЛЬ
LINE-START – ЖИЗНЕСПОСОБНАЯ АЛЬТЕРНАТИВА АСИНХРОННОМУ ДВИГАТЕЛЮ | Šarac
H. Qiu, Y. Zhang, K. Hu, C. Yang и R. Yi «Влияние витков обмотки статора на установившиеся характеристики синхронных двигателей с постоянными магнитами с линейным пуском», Energies, vol. 12, 2363, стр. 1-15, 2019. [Онлайн]. Доступно: https://doi.org/10.3390/en12122363
M.Tian, X. Wang, D. Wang, W. Zhao, C. Li, «Новый синхронный двигатель с постоянными магнитами с линейным пуском и 6/8 полюсами Изменение обмотки статора», IEEE Transactions on Energy Conversion, vol. 33, нет. 3, стр. 1164 – 1174, 2018. [Онлайн]. Доступно: https://doi.org/10.1109/TEC.2018.2826550
Х. Куи, К. Ху, Р. Йи, Ю. Вей, «Влияние асимметрии напряжения на характеристики в установившемся режиме синхронного двигателя с постоянными магнитами и пуском от сети», IEEJ Transaction on Electrical and Electronic Машиностроение, т.14, №11, стр. 1673-1680, 2019. [Онлайн]. Доступно: https://doi.org/10.1002/tee.22990
Б. Зохра, М. Акар, М. Экер, «Проектирование нового ротора синхронного двигателя с линейным пуском», Электроника, том. 8, № 25, стр. 1-18, 2019. [Онлайн]. Доступно: https://doi.org/10.3390/electronics8010025
X. Xu, Y. Cui, X. Wang, H. Feng, J. Si, «Характеристики синхронного двигателя с постоянными магнитами линейного пуска и новой конструкцией ротора», International Journal of Digital Content Technology and its Applications , т.7, вып. 6, стр. 1217-1225, 2013. doi:10.4156/jdcta.vol7.issue6.139
C. Ogbuka, C. Nwosu, M. Agu, «Динамическое и стационарное сравнение синхронных двигателей с постоянными магнитами с линейным пуском с внутренними и поверхностными магнитами», Архив электротехники, т. 1, с. 65, № 1, стр. 105-116, 2016. [Онлайн]. Доступно: http://dx.doi.org/10.1515/aee-2016-0008
Х.Ю. Ма, Г-Дж. Ли, ZQ. Чжу, Г.В. Джуэлл, Дж. Грин, «Исследования синхронных реактивных машин с различными топологиями ротора и конфигурациями обмоток», IET Electric Power Applications, vol. 12, нет. 1, стр. 45-53, 2018. [Онлайн]. Доступно: http://dx.doi.org/10.1049/iet-epa.2017.0199
П. Худак, В. Храбовцова, «Математическое моделирование и определение параметров реактивного синхронного двигателя с короткозамкнутым ротором», Журнал электротехники, том . 61, нет. 6, стр. 357-364, 2010. [Онлайн]. Доступно: https://doi.org/10.2478/v10187-010-0055-y
П. Секерак, В. Храбовцова, Й. Пирхонен, Л. Каламен, П. Рафайдус, М. Онуфер, «Ферриты и различные типы обмотки в синхронном двигателе с постоянными магнитами», Журнал электротехники, том. 63, нет. 3, стр. 162-170, 2012. [Онлайн]. Доступно: https://doi.org/10.2478/v10187-012-0024-8
А. Х. Исфахани, С. Ваез-Заде, «Синхронные двигатели с постоянными магнитами с линейным пуском: проблемы и возможности», Energy, vol. 34, нет. 11, стр. 1755-1763, 2009. [Онлайн]. Доступно: https://doi.org/10.
/j.energy.2009.04.022
Х. Бехбаханифард, А. Садуги, «Уменьшение крутящего момента синхронного двигателя с постоянными магнитами с линейным пуском», Журнал «Электротехника и технологии», том. 11, нет. 4, стр. 878-888, 2016. [Онлайн]. Доступно: https://doi.org/10.5370/jeet.2016.11.4.878.
М. Н. Ф. Ибрагим, П. Сержант, Э. Рашад, «Простой подход к проектированию синхронного реактивного двигателя с низким пульсирующим крутящим моментом и высоким выходным крутящим моментом», Energies, vol. 9, 942, стр. 1-14, 2016. [Онлайн]. Доступно: https://doi.org/10.3390/en
42
Л. Цзин, Дж. Гонг, Ю. Лин, «Анализ и уменьшение зубчатого крутящего момента двигателей с постоянными магнитами с линейным пуском», Прогресс в исследованиях электромагнетизма, М., том. 78, стр. 115-124, 2019. [Онлайн]. Доступно: https://dx.doi.org/10.2528/PIERM18120902
А. Х. Исфахани, С. Ваез-Заде, «Влияние намагничивающей индуктивности на запуск и синхронизацию линейных синхронных двигателей с постоянными магнитами», IEEE Transactions по магнетизму, т. 1, с. 47, нет. 4, стр. 823-829, 2011. [Онлайн]. Доступно: https://doi.org/10.1109/TMAG.2010.2091651
М.А. Рахман, А.М. Ошейба, К. Курихара, М.А. Джаббар, Х.В. Пинг, К. Ван, Х.М. Зубайер, «Достижения в области однофазного высокоэффективного двигателя с внутренними постоянными магнитами с пуском от сети», IEEE Transactions on Industrial Electronics, vol. 59, № 3, стр. 1333-1345, 2012. [Онлайн]. Доступно: https://doi.org/10.1109/TIE.2011.2167111
M. Gwoździewicz, J. Zawilak, «Однофазный линейный синхронный двигатель с постоянными магнитами и наклонным статором», Power Electronics and Drives, vol. 1 (36), вып. 2, стр. 187-1194, 2016. [Онлайн]. Доступно: https://doi.org/
5277/ped160212
М. Гедикпинар, О., Айдогмуш, «Проектирование самозапускающегося гибридного гистерезисного синхронного двигателя с постоянными магнитами, подключенного непосредственно к сети», Турецкий журнал электротехники и компьютерные науки, том. 25, нет. 3, стр. 1657-1668, 2017. [Онлайн]. Доступно: https://doi.org/10.3906/elk-1603-198
P.R. Viego, V. Sousa, J.R. Gómez, E.C. Quispe, «Синхронные реактивные двигатели с постоянными магнитами и прямым пуском от сети с ферритовыми магнитами. для управления постоянной нагрузкой», International Journal of Electrical and Computer Engineering, vol. 10, нет. 1, стр. 651-659, 2020. [Онлайн]. Доступно: http://doi.org/10.11591/
ijece.v10i1.pp651-659
М. Карами, Н. Мариун, М. Р. Мерджоу, М. З. А. А. Кадир, Н. Мисрон, М. А. М. Радзи «Распознавание ошибок статического эксцентриситета в трех -Фазовый линейный пуск синхронного двигателя с постоянными магнитами с использованием метода конечных элементов // Математические проблемы техники. 2014, стр. 1-12, 2014. [Онлайн]. Доступно: https://doi.org/10.1155/2014/132647
И. Хусейн, З. Аль-Хамуз, М.А. Абидо, А. Мильхем, «О математическом моделировании синхронных двигателей с постоянными магнитами линейного пуска в условиях статического эксцентриситета» », Энергии, т. 11, стр. 1-17, 2018. [Онлайн]. Доступно: https://doi.org/10.3390/ru11010197
К.И. Баради, З. Аль-Хамуз, «Моделирование и симуляция синхронного двигателя с постоянными магнитами с линейным пуском и сломанными стержнями», Журнал электрических и электронных систем, том. 7, № 2, стр. 1-7, 2017. [Онлайн]. Доступно: http://dx.doi.org/10.4172/2332-0796.1000259
Ф. Исмагилов, В. Вавилов, Р. Уразбахтин, «Оптимизация синхронных электродвигателей с асинхронным пуском с помощью генетических алгоритмов», Международное обозрение аэрокосмической техники , том. 11 нет. 2, стр. 66-75, 2018. [Онлайн]. Доступно: https://doi.org/10.15866/irease.v11i2.13365
л. Книпински, «Оптимальное проектирование геометрии ротора синхронного двигателя с постоянными магнитами с линейным пуском с использованием алгоритма летучей мыши», Открытая физика. 15, № 1, стр. 965-970, 2017. [Онлайн]. Доступно: https://doi.org/
1515/phys-2017-0119
В. Сарак, Д. Илиев, «Синхронный двигатель с постоянными магнитами по сравнению с асинхронным асинхронным двигателем», Электротехника, Электроника, Автоматика (EEA) , том. 65, нет. 4, стр. 51-58, 2017. [Онлайн]. Доступно: http://www.eea-journal.ro/ro/d/5/p/EEA65_4_8
Ю. Дуан «Метод проектирования и оптимизации машин с постоянными магнитами для поверхностного монтажа и индукционных машин», Диссертация, Технологический институт Джорджии, 2010. [Онлайн]. Доступно: https://smartech.gatech.edu/bitstream/handle/1853/37280/duan_yao_201012_phd.pdf
А. А. Адам, К. Гюлез, С. Кёроглу, «Рассеянное магнитное поле, распределенное вокруг СДПМ», Турецкий журнал по электротехнике Инженерия и компьютерные науки, том. 19, № 1, стр. 119-131, 2011. [Онлайн]. Доступно: http://dx.doi.org/10.3906/elk-1003-404
J. Soleimani, A. Vahedi, A. Ejlali, M.B. Bafghi «Исследование внутренних синхронных двигателей с постоянными магнитами для применения в тяговом приводе гибридных электромобилей с учетом типа постоянного магнита и температуры», Турецкий журнал по электротехнике Инженерия и компьютерные науки, том. 22, № 6, стр. 1517-1527, 2014. [Онлайн]. Доступно: https://doi. org/10.3906/elk-1105-58
M. Güleç, E. Yolaçan, Y. Demir, O. Ocak, M. Aydin, «Моделирование на основе трехмерного конечно-элементного анализа и экспериментального исследования 24-слотового 8-полюсного синхронного двигателя с осевым магнитным потоком без зубчатого крутящего момента и синусоидальной противо-ЭДС», Турецкий журнал электротехники и компьютерных наук, том. 24, нет. 1, стр. 262-275, 2016. [Онлайн]. Доступно: https://doi.org/10.3906/elk-1308-150
А.С.О. Огунджуигбе, А.А. Джимо, Т.Р. Айоделе, «Динамическое и переходное поведение запуска линии, синхронная реактивная машина с компенсацией емкости», Журнал электрических систем и информационных технологий, том. 5, нет. 3, стр. 843-860, 2018. [Онлайн]. Доступно: https://doi.org/10.1016/j.jesit.2016.12.012
Дж. К. Асогва, Э. С. Обе, «Исследование переходных и установившихся режимов работы двухфазных двигателей с постоянными магнитами (LSPMMS) с разными роторами. Конфигурации», Нигерийский технологический журнал (NIJOTECH), том 38, вып. 1, стр. 185-19.2, 2019. [Онлайн]. Доступно: http://dx.doi.org/10.4314/njt.v38i1.23
Ф. Парасилити, М. Виллани, К. Пэрис, О. Валти, Г. Сонгини, А. Новелло, Т. Росси, « Повышение эффективности трехфазного асинхронного двигателя с литой медной клеткой ротора и высококачественной сталью», в Трудах симпозиума по силовой электронике, электроприводам, автоматизации и движению: SPEEDAM 2004, Италия, стр. 338-343, 2004. [Онлайн] . Доступно: https://www.copper.org/environment/sustainable-energy/electric-motors/education/motor-rotor/pdf/Three-Phase_Induction.pdf
Т. Завилак, Й. Завилак, «Минимизация высших гармоник в синхронном двигателе с постоянными магнитами с линейным пуском», Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Politechniki Wrocławskiej Studia and Materiały, vol 63, no. 29, стр. 107-115, 2009. [Онлайн]. Доступно: http://yadda.icm.edu.pl/yadda/
element/bwmeta1.element.baztech-article-BPW9-0009-0014
M. Gwoździewicz, L. Antal, «Исследование линейного пуска постоянного магнита Синхронный двигатель и свойства асинхронного двигателя», Prace Naukowe Instytutu Maszyn, Napędów and Pomiarów Elektrycznych Politechniki Wrocławskiej Studia i Materials, vol 64, no. 30, стр. 13-20, 2010. [Онлайн]. Доступно: http://yadda.icm.edu.pl/yadda/element/bwmeta1.element.baztech-article-BPW6-0021-0014
Г. С. Чингале, Р. Т. Угале, «Конструкция фильтра гармоник для синхронного двигателя с постоянными магнитами с линейным пуском», в материалах Международной конференции по достижениям в области электротехники (ICAEE), Индия, 2014 г. [Онлайн]. Доступно: https://doi.org/10.1109/ICAEE.2014.6838503
16 Основное различие между синхронными и асинхронными двигателями
by Dipali Chaudhari 90
В этом посте мы изучаем разницу между двумя типами двигателей переменного тока (AC). Эти два двигателя переменного тока —
- Синхронный двигатель и
- Асинхронный двигатель.
Если вы готовитесь к экзамену, вивату или собеседованию, вам будут задавать вопросы: синхронные или асинхронные двигатели. Это очень важные темы в электротехнике.
Много раз вас будут просить сравнить эти два типа двигателей.
Здесь я сравниваю синхронный двигатель и асинхронный двигатель с их характеристиками, функциями, приложениями и примерами.
Примечание. Асинхронный двигатель называется «Асинхронный двигатель ».
Разница между синхронными и асинхронными двигателями
Давайте изучим сравнение обоих двигателей переменного тока в табличной форме.
| # | Content | Synchronous Motor | Induction Motor |
| 01 | Definition [What is a synchronous & Induction motors] | Электромагнитный двигатель, который преобразует электрическую энергию в механическую работу с постоянной скоростью, называется синхронным двигателем. | Электромагнитный двигатель, который преобразует электрическую энергию в механическую работу с переменной скоростью, называется «асинхронным двигателем». |
| 02 | Двигатель Скорость | Синхронный двигатель работает на синхронной скорости. | Асинхронный двигатель работает на асинхронной скорости. |
| 03 | Принцип | Синхронный двигатель работает по принципу «магнитной блокировки». | Асинхронный двигатель работает по принципу «электромагнитной индукции». |
| 04 | Начальное положение | Это двигатель без автоматического запуска. | Самозапускающийся двигатель. (особенно трехфазный асинхронный двигатель) |
| 05 | Подключенное питание (переменного и постоянного тока) | Состоит из двух основных частей — статора и ротора. Статор подключается к трехфазному источнику переменного тока, а ротор подключается к источнику постоянного тока соответственно. | Аналогично, он также состоит из двух основных частей — статора и ротора. Единственный статор подключается к трехфазной сети переменного тока. |
| 06 | Система возбуждения (источник постоянного тока для ротора) | Синхронному двигателю требуется система возбуждения постоянного тока (или первичный двигатель) для запуска двигателя (т. е. для вращения ротора). | Для запуска асинхронного двигателя не требуется система возбуждения. |
| 07 | Конструкция | Конструкция синхронного двигателя очень сложна. | Конструкция асинхронного двигателя относительно проста. |
| 08 | Относительное движение | Для синхронного двигателя относительное движение между статором и ротором не требуется. | Для асинхронного двигателя требуется относительное движение между статором и ротором. |
| 09 | Скольжение (магнитное поле в зависимости от скорости вращения ротора) | В синхронном двигателе возникает нулевое скольжение (S=0). | Различное скольжение происходит в асинхронном двигателе. |
| 10 | Скорость двигателя (в об/мин) | Работает от 150 до 1800 об/мин . синхрон скорости. | Работает со скоростью менее 1500 об/мин. синхронная скорость. |
| 11 | Коэффициент мощности | Имеет единичный, отстающий или опережающий коэффициент мощности. В основном работает на единичном коэффициенте мощности. | Имеет только отстающий коэффициент мощности. |
| 12 | КПД (Отношение выходной и входной мощности) | Синхронный двигатель имеет больший КПД благодаря единичному или ведущему коэффициенту мощности. | Асинхронный двигатель менее эффективен, чем синхронный двигатель. |
| 13 | Использование | Используется для коррекции коэффициента мощности, работы с нагрузкой с постоянной скоростью, регулирования напряжения линии передачи и т. д. | В основном используется в промышленности. |
| 14 | Стоимость | Этот двигатель дороже, чем асинхронный двигатель. | Этот двигатель дешевле синхронного двигателя. |
| 15 | Техническое обслуживание | Требуется максимальное техническое обслуживание. | Требуется минимальное обслуживание. |
| 16 | Пример | Вентилятор, нагнетающий вентилятор, осушитель являются примером синхронного двигателя. | Конвейерная лента, прокатный стан, смеситель, измельчитель являются примерами асинхронного двигателя. |
Это все о разнице между синхронными и асинхронными двигателями. Также рассмотрены преимущества и недостатки этих двух двигателей переменного тока.
Надеюсь, это поможет вам при подготовке к экзамену или собеседованию. Если у вас есть какие-либо вопросы, напишите мне сообщение в разделе комментариев ниже. 9
Спасибо за прочтение!
Проверьте свои знания и потренируйтесь в онлайн-викторине БЕСПЛАТНО!
Практика сейчас »
Дипали Чаудхари
Я получил степень магистра в области электроэнергетики. Я работаю и пишу технические руководства по ПЛК, программированию MATLAB и электротехнике на портале DipsLab.com.
Мне очень приятно делиться своими знаниями в этом блоге. И иногда я углубляюсь в программирование на Python.
Разница между синхронным и асинхронным двигателем
Разница между синхронным и асинхронным двигателем | разница между синхронным и асинхронным двигателем
Дом
Синхронный двигатель Асинхронный двигатель: Синхронный двигатель представляет собой тип двигателя переменного тока, который. Среди классических примеров этого явления — асинхронные и асинхронные двигатели. Все асинхронные двигатели являются асинхронными. Асинхронный характер работы асинхронного двигателя. Ротор асинхронных и синхронных линейных двигателей различен, в синхронных двигателях ток подается на ротор, а на ротор асинхронного двигателя ток не подается. Скольжение асинхронного двигателя не равно нулю, и крутящий момент зависит от скольжения, тогда как у синхронных двигателей его нет, т.е. скольжение (s) = Очень простое объяснение различий между синхронными и асинхронными электродвигателями
А синхронный двигатель — это двигатель, в котором ротор вращается с той же скоростью, что и вращающееся магнитное поле в статоре . Асинхронный двигатель — это двигатель, в котором скорость вращения ротора ниже скорости синхронного . Синхронная передача: при синхронной передаче данные отправляются в виде блоков или кадров. Эта передача является полнодуплексным типом. Между отправителем и получателем обязательна синхронизация. Основное различие заключается в том, что асинхронный двигатель имеет фиксированную скорость (синхронный), тогда как скорость асинхронного двигателя всегда меньше скорости синхронного. 2) Почему асинхронный двигатель находит очень широкое применение в промышленности, а синхронный — нет? Этот двигатель практически не требует обслуживания и экономичен
Электромагнитный двигатель, преобразующий электрическую энергию в механическую работу с постоянной скоростью. Когда скорость ротора, а также скорость магнитного поля внутри статора изменяются, такие двигатели называются асинхронными двигателями. Изменение скорости можно назвать скольжением. Разница между синхронным и асинхронным двигателем Разница между синхронным и асинхронным двигателем указана в следующей таблице . На структурном уровне структура синхронного двигателя с постоянными магнитами сложнее, чем у асинхронного двигателя переменного тока, а выходная стоимость выше. . Однако синхронный двигатель с постоянными магнитами имеет меньший объем и меньший вес
.
Основное различие между синхронным и асинхронным Moto
- ed по количеству полюсов в машине и частоте электропитания. Если нагрузка превышает максимальное значение, которое может принять двигатель, он остановится. Асинхронный двигатель, также известный как асинхронный двигатель, работает на более низкой скорости, чем синхронная скорость, в зависимости от нагрузки на двигатель 9.0092
- В синхронном двигателе значение скольжения равно нулю. Асинхронный двигатель переменного тока называется асинхронным двигателем. Бесщеточный двигатель, двигатель с переменным сопротивлением и двигатель с гистерезисом представляют собой тип синхронного двигателя. На момент асинхронного двигателя влияют изменения приложенного напряжения. На крутящий момент синхронного двигателя не влияют изменения приложенного напряжения
- d, что когда речь идет о чем-то, что происходит в одно и то же время, оно является синхронным, но обо всем, что происходит не в одно и то же время.
- Асинхронный двигатель и синхронный двигатель || разница между синхронным и асинхронным- Это видео о разнице между синхронным и асинхронным двигателем..
- Для асинхронных двигателей не требуется пусковой механизм. Коэффициент мощности синхронного двигателя можно отрегулировать с отставанием, единицей или опережением, изменяя возбуждение, тогда как асинхронный двигатель всегда работает с отстающим коэффициентом мощности. Синхронные двигатели, как правило, более эффективны, чем асинхронные двигатели. Синхронные двигатели дороже
- Электрические двигатели — это машины, которые выполняют механические операции путем преобразования электрической энергии в механическую. Эти двигатели предназначены для работы на переменном токе (AC) или на постоянном токе (DC). Двигатели переменного тока бывают двух типов: синхронные двигатели и асинхронные двигатели. Обе эти машины имеют некоторые сходства, как и их конструкция, но они совершенно разные [
- Разница между принципом работы асинхронного двигателя и синхронным. Область его применения. Taizhou Xinyi Machinery Co Ltd. Конструкция асинхронного двигателя. Рабочие различия. Преимущества и недостатки асинхронного двигателя.0092
В чем разница между асинхронным и синхронным
- Синхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряжения. Асинхронный двигатель дешевле синхронного двигателя той же мощности и номинального напряжения. Асинхронный двигатель также известен как асинхронный двигатель
- Большинство насосов и вентиляторов, используемых в промышленных и коммерческих целях, в настоящее время приводятся в действие асинхронными двигателями переменного тока. ACIM, что означает чередование куб..
- В чем разница между синхронными и асинхронными генераторами? Синхронный генератор называется синхронным, потому что форма волны генерируемого напряжения синхронизирована с вращением генератора. Асинхронный генератор — это, по сути, такая же машина, как асинхронный или асинхронный двигатель.
- подробное представление о магнитных полях и создании крутящего момента с учетом вращающегося магнитного поля, короткозамкнутого ротора как многоцилиндрового двигателя.
- Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент невелик. В реактивном двигателе ротор имеет выступающие полюса, напоминающие отдельные зубья
- Sysnchronus Двигатели имеют постоянное магнитное поле в роторе, они не могут использовать индукционные обмотки для запуска. Для запуска этих двигателей требуется источник питания с переменной частотой. Основное различие между синхронным двигателем с постоянными магнитами и асинхронным двигателем заключается в частоте вращения 9.0092
- Синхронный двигатель против асинхронного двигателя — разница между асинхронным двигателем и синхронным двигателем. со скоростью вращающегося магнитного поля в статоре . Если скорость вращения ротора и скорость поля статора одинаковы, это называется синхронным двигателем; если нет, то это асинхронный двигатель. Двигатели переменного тока: синхронные и асинхронные двигатели переменного тока можно разделить на две категории: синхронные и асинхронные, которые зависят от скорости вращающегося магнитного поля. Синхронный двигатель переменного тока в установившемся режиме вращает вал синхронно с частотой приложенного тока. Обмоточный двигатель. Основное различие в конструкции между трехфазным асинхронным двигателем с обмоткой и трехфазным асинхронным двигателем с короткозамкнутым ротором заключается в роторе. В обмотках ротора витого типа используются изолированные провода, которые разделены на трехфазные обмотки, симметрично уложенные в паз сердечника ротора по определенному правилу. Асинхронным двигателем называется машина, ротор которой вращается со скоростью, меньшей синхронной. Синхронный двигатель не имеет скольжения. В чем разница между синхронным и асинхронным двигателем? Синхронный двигатель — это машина с двойным возбуждением, тогда как асинхронный двигатель — это машина с одинарным возбуждением. В чем разница между синхронным двигателем и асинхронным двигателем? Вот краткое введение: 1. Разница в скорости: самая большая разница между ними — синхронная и асинхронная. Так называемая синхронизация, как следует из названия, относится к одной и той же скорости, генерируемой трехфазным током обмотки статора синхронного двигателя.
Разница между синхронным двигателем и асинхронным двигателем объясняется с учетом некоторых факторов, таких как его тип, скольжение, источник питания, требования к токосъемному кольцу и щеткам, стоимость, коэффициент мощности, эффективность, скорость, самоопределение, источник тока, различные области применения. , рабочая скорость перечислены ниже с использованием их сравнений. Определение синхронного двигателя Двигатель очень чувствителен к внезапным изменениям нагрузки, результатам рывков. Охота отсутствует. Мотор дорогостоящий, требует частого обслуживания. Мотор дешевый, обслуживание реже. Его можно использовать в качестве синхронного конденсатора для улучшения коэффициента мощности.
Не может использоваться в качестве синхронного конденсатора. Предыдущий пост Следующий пост Скорость асинхронного генератора зависит от прилагаемой к нему вращающей силы (момент или крутящий момент). На практике разница между скоростью вращения на пиковой мощности и на холостом ходу очень мала, около 1%. Эта разница в процентах от синхронной скорости называется скольжением генератора. Таким образом, 4-полюсный генератор будет работать на холостом ходу. 1-Установите асинхронный двигатель с роторным синхронным двигателем, в отличие от очень простой полки. 2-Структура двигателя проста. 3-Возможность увеличения нагрузки на них высокаВсе асинхронные двигатели являются асинхронными. Асинхронный характер работы асинхронного двигателя возникает из-за скольжения между скоростью вращения поля статора и несколько более низкой скоростью вращения ротора. Асинхронный двигатель работает немного медленнее, чем приложенная частота. Скорость синхронного двигателя определяется частотой переменного тока.
КПД асинхронного электродвигателя. Из-за физических свойств асинхронного двигателя его энергоэффективность несколько ниже, чем у его синхронного аналога. Скольжение описывает разрыв в скорости между ротором и статором, объясняя разницу между двумя двигателямиСуществует два режима доступности: синхронная фиксация и асинхронная фиксация. Выбор режима эквивалентен выбору того, хотите ли вы отдать предпочтение защите данных или производительности транзакций. Оба режима доступности следуют одному и тому же рабочему процессу с одним небольшим, но важным отличием. В режиме синхронной фиксации приложение не получает. Между синхронным двигателем и асинхронным двигателем существует много различий: рабочая скорость синхронного двигателя составляет об/мин = 120f/p, тогда как рабочая скорость асинхронного двигателя намного меньше, т.е. RPM = 120f/p-скольжение. Скольжение — относительное явление; он равен нулю, когда нет нагруженного крутящего момента, но увеличивается с величиной нагрузки Ниже в Таблице 1 показано качественное сравнение некоторых общих характеристик асинхронных и синхронных двигателей, а также представлены преимущества и недостатки каждой конструкции двигателя переменного тока .
Таблица 1: Сравнение асинхронных двигателей и синхронных двигателейСинхронные и асинхронные двигатели Этимологически говоря, в синхронном двигателе роторы вращаются со скоростью, аналогичной скорости магнитного поля или поля статора, в то время как в асинхронных двигателях ротор вращается с несколько меньшей скоростью, чем скорость индуцированного магнитного поля. Различия между синхронным и асинхронным двигателем. Его скоростью можно управлять с помощью отдельной схемы. Это не самозапускающийся двигатель; ему нужны внешние средства для обеспечения необходимой (синхронной) скорости. Это самозапускающийся двигатель, он запускается из состояния покоя до полной скорости без какого-либо другого источника. В этой статье рассматриваются основные различия между асинхронным двигателем и синхронным двигателем на основе нескольких важных факторов, таких как конструкция, пусковой механизм, возбуждение, Управление скоростью, коэффициент мощности, изменение нагрузки, стоимость, скольжение, эффективность и приложения.
Асинхронное и синхронное программирование. Прежде чем мы перейдем к самому интересному, давайте начнем с разъяснения различий между асинхронным и синхронным программированием. В синхронных операциях задачи выполняются по одной и только при выполнении одной разблокируются следующие Принципиальной разницы между синхронным двигателем sm и синхронным генератором sg нет. Все они представляют собой синхронные машины, первая из которых преобразует электрическую энергию в механическую, а последняя преобразует механическую энергию в электрическую.системы. Следующее обсуждение посвящено сравнению между линейным асинхронным двигателем с коротким статором и линейным синхронным двигателем с длинным статором, в частности, наиболее зрелыми приводами, которые в настоящее время устанавливаются и внедряются для HSST и LSM-управляемые системы Transrapid maglev Асинхронный двигатель также называется асинхронным двигателем. Другого имени нет. Скорость: его рабочая скорость зависит от нагрузки, т.
е. скорость двигателя уменьшается с увеличением нагрузки. Скорость синхронного двигателя не зависит от нагрузки. Возбуждение: асинхронный двигатель представляет собой тип машины с одним возбуждением 9.0003Синхронный двигатель вращается с синхронной скоростью и состоит из ротора, который получает энергию от постоянного тока. Синхронный двигатель часто считается дорогим. С другой стороны, асинхронный двигатель вращается со скоростью меньше, чем у синхронного двигателя. Он также известен как асинхронный двигатель. Асинхронный двигатель часто используется из-за. Разница между обычным асинхронным двигателем и двигателем с переменной частотой. 1. Обычные асинхронные двигатели рассчитаны на постоянную частоту и постоянное напряжение, что не может полностью удовлетворить требования регулирования скорости с переменной частотой. Ниже показано влияние инвертора на двигатель. Разница между синхронным и асинхронным. Синхронный и асинхронный. Синхронный и асинхронный — это два громких слова, которые кажутся пугающими, но на самом деле довольно простые.
Синхронность просто означает, что все события происходят в определенном временном порядке, который можно предсказать. Определенное событие всегда будет следовать за другим, и они не могут быть заменены. Синхронный двигатель имеет ту же конструкцию статора, что и асинхронный двигатель, и он генерирует вращающееся магнитное поле при подаче на вход переменного тока. В то время как конструкция ротора может варьироваться, например, он использует отдельное возбуждение постоянного тока для создания собственного магнитного поля. Связанный пост: Разница между синхронным и асинхронным двигателем Асинхронный или асинхронный генератор представляет собой электрический асинхронный двигатель, приводимый в движение на скоростях выше его синхронной скорости.; Он имеет твердый якорь или беличью клетку, которая представляет собой электрическое короткое замыкание. Когда ток подключен, машина начнет вращаться, как двигатель, со скоростью, которая чуть ниже синхронной скорости вращающегося магнитного поля от статора.Асинхронный генератор представляет собой генератор переменного тока, в котором используется вращающееся магнитное поле воздушного зазора между статором и ротором для взаимодействия с наведенным током в обмотке ротора. По принципу работы его также называют асинхронным генератором. Скорость немного выше, чем синхронная скорость Ключ Разница : Синхронные Двигатели Асинхронные двигатели и являются наиболее широко используемыми типами двигателей переменного тока . В синхронный электрический двигатель вращение вала синхронизировано с частотой питающего тока. Асинхронный двигатель представляет собой электрический двигатель переменного тока , в котором электрический ток в роторе создается за счет электромагнитной индукции от магнитного поля обмотки статора. СДПМ, что означает синхронный двигатель с постоянными магнитами, использует магниты для вращения ротор, который вращается с той же скоростью, что и внутреннее вращающееся магнитное поле СДПМ.
Есть несколько ключевых различий между асинхронными двигателями переменного тока и синхронными двигателями с постоянными магнитами. Двигатели с постоянными магнитами ДОЛЖНЫ работать с приводомРазличия между синхронными и асинхронными двигателями
Короткий ответ: бесщеточные двигатели постоянного тока (BLDC) и синхронные двигатели переменного тока аналогичны по конструкции и работе. Некоторые производители и эксперты даже объединяют их как похожие технологии в категорию синхронных двигателей с постоянными магнитами. Однако их основное различие заключается в обмотках катушки статора и возникающей противо-ЭДС. Двигатели переменного тока в основном бывают двух типов: Синхронный двигатель Асинхронный двигатель (асинхронный двигатель) Как асинхронные, так и синхронные двигатели являются машинами переменного тока. Основное различие между этими двумя машинами заключается в том, что синхронный двигатель, как следует из названия, всегда работает с постоянной (синхронной) скоростью.
th, 2019 — Двигатели переменного тока в основном бывают двух типов: синхронный двигатель и асинхронный двигатель. Асинхронный двигатель также известен как асинхронный двигатель Bot.
Стратегии синхронной и асинхронной репликации. Можно выделить два основных типа репликации данных: синхронную и асинхронную. Синхронная репликация. Здесь данные реплицируются во вторичное удаленное место одновременно с созданием или обновлением новых данных в первичном центре обработки данных. Двигатели переменного тока в основном бывают двух типов: синхронный двигатель и асинхронный двигатель. Асинхронный двигатель также известен как асинхронный двигатель. Оба двигателя являются широко используемыми электродвигателями. Хотя существует большой список различий между этими двумя двигателями, здесь мы узнаем некоторые основные и основные различия, как указано ниже: Синхронный. Разница между этими двумя скоростями называется скольжением и обычно указывается в процентах от синхронной скорости. Магнитное поле №1 (быстрее) — Магнитное поле №2 (медленнее) = Скольжение.
Синхронный двигатель. Как нетрудно догадаться, ротор синхронного двигателя вращается с той же скоростью, что и синхронная скорость 9.0003Как: Отличить синхронный и асинхронный двигатель
Двигатели переменного тока
делятся на два типа: синхронные двигатели и асинхронные двигатели, которые также называются асинхронными двигателями. Самая большая разница между синхронными двигателями и асинхронными двигателями (асинхронными двигателями) заключается в том, соответствует ли скорость ротора скорости вращающегося магнитного поля в статоре. Поскольку скорость ротора и скорость магнитного поля статора различаются, эти двигатели известны как асинхронные двигатели. Разница в скорости называется скольжением. Синхронные и асинхронные двигатели – преимущества и недостатки. Синхронный двигатель работает с постоянной скоростью на заданной частоте независимо от нагрузки. Ознакомьтесь с разделом Определение синхронного и асинхронного в веб-приложениях для предыдущего обсуждения. Вкратце: асинхронные API не блокируются.
Каждый синхронный вызов ожидает и блокирует ваши результаты > для возврата. Это всего лишь спящий поток и бесполезные вычисления. Были рассмотрены основные различия между коммутируемыми (SRM) и синхронными (SynRM) машинами с нежеланием: SRM могут быть шумными и их сложно снабжать. SRM имеют прочные роторы. Количество полюсов ротора тесно связано с количеством зубьев статора в SRM. SynRM очень похожи на другие, более традиционные двигатели и могут поставляться в стандартной комплектации.Разница между синхронным и асинхронным
- Асинхронные двигатели переменного тока в сравнении с синхронными насосами и оборудованием с постоянными магнитами. Асинхронный двигатель в сравнении с синхронным и асинхронным. Что люди ищут в этом блоге: Синхронный двигатель и асинхронная машина
- Входная мощность синхронного двигателя определяется следующим образом: Где. Φ — угол между V и I а. Механическая мощность в роторе: где. α — угол нагрузки между E b и V; Φ — угол между V и I a; T g — создаваемый полный крутящий момент; N s – синхронная скорость; Похожие сообщения: Серводвигатель — типы, конструкция, работа, управление и применение
- Разница между синхронным TDM и статистическим TDM: 1. Поток данных каждого входного соединения делится на блоки, и каждый вход управляет одним выходным временным интервалом. Слоты распределяются динамически. Входной строке даются слоты в выходном фрейме только в том случае, если у нее есть данные для отправки. 2
Разница между синхронным двигателем и асинхронным двигателем: Здесь мы увидим основное различие между синхронным двигателем и асинхронным двигателем. Синхронные двигатели вращаются со скоростью вращающегося магнитного поля, скорость постоянна, у него есть только одна скорость, что означает, что скорость двигателя всегда синхронизирована с питанием. Существенная разница между синхронным и асинхронным счетчиком заключается в том, как тактовый сигнал предоставляется этим цифровым устройствам. Синхронный счетчик — это счетчик, в котором все триггеры тактируются одновременно с одинаковым тактовым входом. Наоборот, асинхронный счетчик — это устройство, в котором все триггеры. Между прочим, серводвигатель получил свое название от латинского слова servus, означающего сервер на английском языке .
Серводвигатели состоят из асинхронного двигателя, синхронного двигателя или двигателя постоянного тока. Таким образом, разница между двигателями заключается не в самом принципе привода, а только в их возможностях регулирования. Самая большая разница между ним и асинхронным двигателем заключается в уникальной конструкции ротора. На роторе размещены высококачественные полюса постоянных магнитов. Его характеристики: большая мощность на единицу веса, большой ток перегрузки, но низкое быстродействиеСуществует много различий между синхронной и асинхронной передачей. Одно из основных отличий заключается в том, что синхронная передача управляется тактовым импульсом, тогда как асинхронная передача управляется событиями. В этой статье мы рассмотрим различия между ними. Существует два основных типа двигателей переменного тока, в зависимости от типа используемого ротора. Первый тип — асинхронный двигатель или асинхронный двигатель; этот тип основан на небольшой разнице в скорости между вращающимся магнитным полем и ротором, чтобы индуцировать ток ротора
Асинхронный двигатель: конструкция, работа и отличия
- В некоторых случаях синхронные двигатели могут достигать КПД > 90 % и часто более энергоэффективны, чем асинхронные двигатели. КПД зависит от конкретного типа и размера двигателя, но синхронные двигатели не имеют скольжения, что означает, что при преобразовании электрической и механической энергии теряется меньше энергии. Наконец, общая тема между ними.
- Еще одно различие между синхронным и асинхронным обменом сообщениями заключается в их популярности в службе поддержки клиентов. В отличие от асинхронного чата, синхронный чат имеет долгую историю использования в бизнесе. И это видно по важности, придаваемой мгновенным ответам. 44% клиентов говорят, что иметь кого-то на другом конце провода при обмене сообщениями — это важно.
- Не синхронно; происходящие в разное время. (вычисление запроса или сообщения) Разрешение клиенту продолжать обработку во время обработки. ( вычисление , общение ) Наличие множества действий, происходящих одновременно, в любом порядке, без ожидания друг друга
- Синхронный двигатель: Синхронный двигатель идентичен по конструкции генератору переменного тока или генератору переменного тока. Подобно машинам постоянного тока, синхронная машина может использоваться как генератор переменного тока при механическом приводе или как двигатель при электрическом приводе. В следующей таблице показано сравнение между синхронным двигателем и трехфазным асинхронным двигателем 9.0092
- Обсудите разницу между синхронным и асинхронным общением и объясните, как это влияет на общение в группах социальных сетей. задан 27 июля 2019 г. в разделе Коммуникации и средства массовой информации от Kabecill
- Различия между синхронным и несинхронным выпрямительным импульсным регулятором с преобразованием постоянного тока в постоянный. Основы Как было объяснено в предыдущем разделе, среди преобразователей постоянного тока в постоянный ток неизолированный понижающий импульсный регулятор включает две топологии: тип несинхронного выпрямления (диод) и тип синхронного выпрямления
- Синхронный двигатель Синхронный двигатель представляет собой двигатель переменного тока, который создает крутящий момент за счет магнитного поля возбуждения, питаемого постоянным током, которое взаимодействует с вращающимся магнитным полем якоря, чтобы вращаться с синхронной скоростью. Структура синхронного двигателя в основном такая же, как и у синхронного генератора, а ротор также разделен на явный полюс и скрытый полюс
.
16 Основное различие между синхронным и асинхронным двигателем
Синхронный двигатель с постоянными магнитами Различия между синхронным асинхронным двигателем, асинхронными двигателями переменного тока и синхронными двигателями с постоянными магнитами, увеличивающими мощность насосов и оборудования, асинхронным двигателем и синхронным, асинхронным, разница между асинхронным и синхронным двигателем. Что люди ищут в этом блоге. Разница между синхронным и асинхронным двигателем И синхронные, и асинхронные двигатели являются трехфазными машинами. Их трехфазная обмотка состоит из 3-х витков, отстоящих друг от друга на 120° по окружности. Если такую обмотку подключить к симметричной трехфазной системе, фазы которой взаимно сдвинуты на 120°, а. Скольжение – это разница между скоростями магнитного поля и ротора. 6. Увеличенный ток ротора создает больший крутящий момент в двигателе.
Асинхронный асинхронный двигатель переменного тока — единственный двигатель в этом отчете, который реагирует на свою нагрузку таким образом. Это позволяет запустить двигатель через линию электропередачи. Разница между синхронным и асинхронным режимами. Как обсуждалось в предыдущем разделе, термин асинхронный может использоваться в различных областях, таких как связь, программирование, электрическое поле и т. д. Все эти области также содержат синхронные методы, и это связано с тем, что синхронные и асинхронные методы используются в отличие от друг другаАсинхронный двигатель: конструкция, работа, отличия
Синхронные подключаемые модули: Асинхронные подключаемые модули: Синхронные подключаемые модули выполняются основной системой CRM. Асинхронные плагины выполняются асинхронной службой. Синхронное выполнение означает, что инициирующее событие будет ждать, пока плагины не закончат выполнение. Асинхронные подключаемые модули позволяют завершить событие триггера до того, как запустится код подключаемого модуля Синхронный и асинхронный двигатель Синхронная скорость двигателя переменного тока — это скорость вращения вращающегося магнитного поля, создаваемого статором.
Синхронная скорость всегда является целой долей частоты источника питания. Синхронная скорость (нс) асинхронного двигателя в оборотах в минуту (об/мин) определяется выражением, где f [ При быстром развитии современной науки и техники СДПМ со своими преимуществами быстро занимают рынок и полностью превосходят обычный двигатель, так каковы характеристики СДПМ и чем они отличаются от обычного двигателя? По сравнению с традиционным двигателем электрического поля, PMSM вентилятора PMSM, особенно rar. Разница между двумя типами заключается в том, что синхронный двигатель вращается со скоростью, привязанной к частоте сети, поскольку он не зависит от индукции тока для создания ротора. магнитное поле. Напротив, асинхронный двигатель требует скольжения: ротор должен вращаться немного медленнее, чем переменный ток, чтобы индуцировать ток в двигателе.В чем разница между постоянным магнитом
Глобальная классификация электродвигателей делится в основном на две разные ветви: двигатели переменного тока и двигатели постоянного тока.
В этой статье основное внимание будет уделено четырем различным подгруппам: асинхронные двигатели переменного тока, синхронные коллекторные двигатели постоянного тока (с коммутатором), бесщеточные двигатели постоянного тока и синхронные синусоидальные двигатели переменного тока с постоянными магнитами (PMSM). 1 Синхронная и асинхронная передача — это два типа метода последовательной передачи данных. Но принципиальное различие между синхронной и асинхронной передачей заключается в том, что при синхронной передаче общий тактовый импульс передается между передатчиком и приемником, чтобы обеспечить синхронную связь. Бесколлекторные двигатели постоянного тока аналогичны синхронным двигателям переменного тока. Основное отличие состоит в том, что синхронные двигатели развивают синусоидальную противо-ЭДС по сравнению с прямоугольной или трапециевидной противо-ЭДС для бесщеточных двигателей постоянного тока. Оба имеют статор, созданный вращающимися магнитными полями, создающими крутящий момент в магнитном роторе. Принцип действия синхронных машин (двигателей). Мы уже знаем, что в статоре есть вращающееся магнитное поле. Таким образом, в случае синхронных двигателей вместо создания силы Лоренца мы блокируем полюса электромагнита постоянного тока статора вращающимся трехфазным полем. Это означает, например, Северный полюс. Асинхронные двигатели переменного тока по сравнению с постоянными асинхронными двигателями с постоянными магнитами. Типичные карты эффективности синхронных синхронных двигателей Fuji Electric Global. Асинхронные двигатели переменного тока против синхронных насосов и оборудования с постоянными магнитами. Различия между синхронными асинхронными двигателямиВ чем разница между синхронным и
Разница между номинальной мощностью и фактической мощностью двигателя означает, что двигатель находится в наилучшем рабочем состоянии по этим данным. Номинальное напряжение фиксировано, допустимое отклонение составляет 10%. Фактическая мощность и фактический ток Taichuang варьируются в зависимости от размера нагрузки.
Синхронные двигатели. Pdf Сравнение асинхронных и синхронных двигателей с постоянными магнитами для электромобилей, включая примеры проектирования Gianmario Pellegrino Academia Edu. Типы двигателей переменного тока. Синхронное возбуждение двигателя Electrical4u. Асинхронные двигатели переменного тока и синхронные двигатели с постоянными магнитами. Разница между трехфазным асинхронным двигателем и синхронным двигателем. Обмотка статора асинхронного двигателя питается от источника переменного тока. Синхронный двигатель всегда работает на синхронной скорости, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает на скорости ниже синхроннойРазница между асинхронным двигателем и синхронным двигателем
асинхронный (не сопоставимый) Не синхронный; происходящие в разное время. (вычисление запроса или сообщения) Разрешение клиенту продолжать обработку. (вычисления, связь) Наличие множества действий, происходящих одновременно, в любом порядке, без ожидания друг друга.
Синонимы. асинхронный (разговорный) асинхронный (разговорный) метахронный. Однако благодаря движку V8 JavaScript может быть асинхронным, что означает, что мы можем выполнять несколько задач в нашем коде одновременно. Итак, в этой статье я решил показать вам разницу между синхронным и асинхронным кодом в JavaScript 9.0003Судя по внешнему виду двигателя, двигатели для установки V1 и B5 имеют фланцевое соединение, но не заземлены, но их внутренняя конструкция и установка отличаются: Направление удлинения вала: вал двигателя V1 направлен вниз, вал двигателя B5 проходит горизонтально. Характеристики торцевой крышки: торцевая крышка V1 с фланцем, фланец с t Re: разница между серводвигателем и трехфазным синхронным двигателем, да? синхронные двигатели также замкнуты. ваш ток должен быть синфазным с противо-ЭДС двигателя, иначе он не работает! правда, вам не нужно контролировать положение, регулировать положение, если вы не хотите — это необязательно для синхронного двигателя, отличный ответ, я бы добавил, что синхронное событие будет обрабатываться из того же потока (поэтому он блокирует ваш текущий поток), в то время как асинхронное событие обрабатывается другим потоком (или даже другой JVM в среде кластера).
Расшифровка терминологии двигателя может быть неприятной, особенно при сравнении работы и производительности различных типов двигателей. Например, некоторые двигатели характеризуются их скоростью (синхронные или асинхронные), а другие характеризуются их методом коммутации (щеточный или бесщеточный)- نظام البيت في الشعر العمودي.
- رواتب القوات المسلحة القطرية.
- اومبري رمادي غامق.
- رابح صقر صعب mp3.
- مسرحية فندق الثلاث ورقات.
- كتالوج ماكينة خياطة سنجر 298.
- مازدا mx 5 للبيع في الإمارات.
- درجات دوالي المريء.
- علاج التهاب المسالك البولية للرجال.
- علامات الحمل عالم حواء.
- عيادة بيطرية جسر السويس.
- Лучший проектор.
- معنى كلمة يستوفون.
- حي الخالدية جدة.
- محل سكيت رول في الكويت.
- الفساد الناتج عنه حمل.
Синхронные двигатели ABB
Благодаря своему беспрецедентно высокому КПД синхронные двигатели будут играть ключевую роль в передаче энергии не только за счет снижения потерь, но и за счет своего вклада в такие приложения, как водород, хранение энергии и улавливание углерода и Хранение (CCS).
Они также могут оказывать стабилизирующее воздействие на электросеть с интенсивным использованием возобновляемых источников энергии благодаря своей способности производить реактивную мощность.Ключевые преимущества
- Высокая надежность и эффективность
- Индивидуальный дизайн для приложения
- Снижает общую стоимость владения для клиента
- Предназначен для снижения воздействия на окружающую среду
- Глобальная сервисная сеть и экспертная поддержка в предметной области
- Заранее определенная программа обслуживания обеспечивает поддержку на протяжении всего жизненного цикла
Синхронные двигатели ABB, предложение
АББ является ведущим поставщиком синхронных двигателей и генераторов на рынке. Во всем мире наши синхронные двигатели обеспечивают высокую производительность в промышленных процессах, в морской и оффшорной отраслях, коммунальных услугах и специализированных приложениях.
Синхронные двигатели для судов
Синхронные двигатели АББ для морского применения оптимизированы для приведения в движение крейсеров и авианосцев. Доступны как обычные, так и пропульсивные двигатели, а проверенная конструкция обеспечивает чрезвычайно хорошие характеристики, высокую эффективность и надежность в различных типах морских установок. Двигатели в основном используются с приводами с регулируемой скоростью.
Синхронные двигатели для нефтегазовой промышленности
Синхронные двигатели АББ для нефтегазовой промышленности оптимизированы для насосов, вентиляторов, центробежных и поршневых компрессоров, используемых в нефтегазовой промышленности.
Доступны как низкоскоростные, так и высокоскоростные двигатели, а проверенная конструкция обеспечивает чрезвычайно хорошие характеристики, высокую эффективность и надежность в различных типах нефтегазовых установок. Двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью.Синхронные двигатели для воды
Синхронные двигатели АББ для водного хозяйства оптимизированы для применения в насосах, что обычно означает квадратичную нагрузку и высокий крутящий момент при низкой или средней скорости. Проверенная конструкция обеспечивает чрезвычайно высокую производительность и надежность в различных типах насосных установок.
Двигатели подключаются непосредственно к сети или питаются от приводов с регулируемой скоростью. Они идеально сочетаются с приводами АББ, которые зарекомендовали себя во многих приложениях с превосходной производительностью.
Наши решения предназначены для того, чтобы помочь клиентам управлять рисками, связанными с безопасным водоснабжением, высокими затратами на электроэнергию и недоходной водой, которые являются результатом урбанизации, нехватки воды и утечек воды.
Синхронные двигатели и сервисные решения АББ обеспечат вам душевное спокойствие, повысив надежность и сэкономив ваши деньги в долгосрочной перспективе.
Синхронные двигатели для химических и воздухоразделительных установок
Синхронные двигатели АББ для химической промышленности и разделения воздуха оптимизированы для экструдеров, компрессоров и детандеров, используемых в химической промышленности. Доступны как низкоскоростные, так и высокоскоростные двигатели, а проверенная конструкция обеспечивает чрезвычайно хорошую производительность, высокую эффективность и надежность в различных типах химических установок. Двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью.
Синхронные двигатели для металлов
Синхронные двигатели АББ для металлургии оптимизированы для воздуходувок, насосов и мельниц, используемых в металлургической промышленности. Доступны как низкоскоростные, так и высокоскоростные двигатели, а проверенная конструкция обеспечивает чрезвычайно хорошую производительность, высокую эффективность и надежность в различных типах металлических установок.
В отрасли, которая характеризуется теплом, движением, импульсом и энергией, активы должны быть устойчивыми к самым изменчивым процессам и окружающей среде. АББ обладает масштабами, техническими ноу-хау и экспертными знаниями в своей области, чтобы быть вашим надежным партнером в металлургической промышленности и постоянно поддерживать вас в повышении энергоэффективности, надежности, производительности и безопасности
Как и наши синхронные двигатели для нефтяной и газовой промышленности, двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью.
Синхронные двигатели для горнодобывающей промышленности
Синхронные двигатели АББ для горнодобывающей промышленности оптимизированы для мельниц, шахтных подъемников и конвейеров, используемых в горнодобывающей промышленности.
В отрасли, для которой характерны суровые условия, удаленные местоположения и энергоемкие приложения, активы должны быть устойчивыми к самым суровым процессам и средам.
Компания АББ обладает масштабами, техническими ноу-хау и экспертными знаниями в своей области, чтобы быть вашим надежным партнером в горнодобывающей промышленности и постоянно поддерживать вас в повышении энергоэффективности, надежности, производительности и безопасности.Доступны как низкоскоростные, так и среднескоростные двигатели, а проверенная конструкция обеспечивает чрезвычайно хорошую производительность, высокую эффективность и надежность в различных типах горнодобывающих установок. Двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью.
Синхронные двигатели для целлюлозно-бумажной промышленности
Синхронные двигатели АББ для целлюлозно-бумажной промышленности оптимизированы для рафинерных и деревообрабатывающих заводов. Проверенная конструкция обеспечивает исключительно хорошую производительность, высокую эффективность и надежность на различных типах целлюлозно-бумажных предприятий.
Синхронные двигатели для других отраслей и применений
Синхронные двигатели общего назначения компании АББ оптимизированы для обеспечения высокой надежности и эффективности.
Доступны как низкоскоростные, так и высокоскоростные двигатели, и конструкция обеспечивает чрезвычайно хорошие характеристики в различных типах установок. Двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью.В чем разница между синхронным двигателем и асинхронным двигателем?
Разница между синхронным и асинхронным мотором
Функция Синхронный мотор Асинхронный мотор Определение Это один вид. машина, где ро … Тип Типы синхронные переменно-реактивные … Индукция переменного тока также известна как асинхронная … Slip The slip value of this motor is zero The slip value of this motor is not equa … Cost It is expensive It is less cost дек.
12 2021 Для чего используется асинхронный двигатель?
В заключение, синхронные двигатели используются только тогда, когда от машины требуется низкая или сверхнизкая скорость, а также при желаемых коэффициентах мощности (как с опережением, так и с отставанием). Принимая во внимание, что асинхронные двигатели преимущественно используются в большинство вращающихся или движущихся машин , таких как вентиляторы, подъемники, шлифовальные машины и т. д.
Каковы примеры асинхронного двигателя?
Все асинхронные двигатели являются асинхронными.
Асинхронное прозвище возникает из-за скольжения между скоростью вращения поля статора и несколько более низкой скоростью ротора. Короткозамкнутый ротор от асинхронного двигателя. Этот пример из небольшой вентилятор .11 января 2019 г.Почему двигатель называется асинхронным?
Потому что работает на скорости меньше синхронной скорости . Поскольку асинхронный двигатель не может вращаться с синхронной скоростью, он всегда вращается с меньшей синхронной скоростью. Короче говоря, асинхронный двигатель никогда не вращается с синхронной скоростью, поэтому он называется асинхронным двигателем.
Как определить, асинхронный двигатель или синхронный?
если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока.
если двигатель переменного тока имеет скольжение или есть разница между скоростью вращения поля статора и ротора , двигатель называется асинхронным двигателем.Родственный
Каковы преимущества асинхронного двигателя?
Что касается асинхронного двигателя, стоимость очень низкая, процесс прост, работа надежна, а техническое обслуживание удобно. Он может работать в сложной рабочей среде и обладает относительно сильной способностью адаптироваться к большим изменениям окружающей рабочей температуры. 4 февраля 2021 г.
Связанные
Почему часто используются асинхронные двигатели?
В частности, асинхронный трехфазный двигатель используется в промышленности по таким причинам, как низкая стоимость, простота обслуживания .
Производительность этого двигателя хороша по сравнению с однофазным двигателем. Главной особенностью этого двигателя является то, что скорость не может быть изменена.Связанные
В чем разница между асинхронным двигателем и асинхронным двигателем?
Принципиальное различие между этими двумя двигателями заключается в том, что скорость вращения ротора относительно скорости статора равна у синхронных двигателей , а скорость вращения ротора у асинхронных двигателей меньше его синхронной скорости. Вот почему асинхронные двигатели также известны как асинхронные двигатели. 29 июля 2021 г.
Синхронные двигатели переменного или постоянного тока?
Синхронный электродвигатель — электродвигатель переменного тока , в котором в установившемся режиме вращение вала синхронизировано с частотой питающего тока; период вращения точно равен целому числу циклов переменного тока.
Связанные
Имеют ли синхронные двигатели щетки?
Ротор может иметь постоянные магниты или обмотки, питаемые выпрямленным постоянным током, питаемым через щетка и токосъемное кольцо. Скорость вращения поля статора называется синхронной скоростью. 3 июня 2015 г.
В чем разница между синхронным и асинхронным?
В чем разница между синхронной и асинхронной инструкцией? … Синхронное обучение — это интерактивное, двустороннее онлайн-обучение или дистанционное обучение , которое происходит в режиме реального времени с учителем, тогда как асинхронное обучение происходит практически онлайн и с помощью подготовленных ресурсов, без взаимодействия под руководством учителя в режиме реального времени.Jul 13, 2020
Родственный
Что означает асинхронный двигатель с короткозамкнутым ротором?
Электродвигатели с короткозамкнутым ротором являются подклассом асинхронных двигателей, которые используют электромагнетизм для создания движения .
… Переменный ток, проходящий через статор, создает ЭДС, которая колеблется с частотой переменного тока, которая «вращается» вокруг ротора, индуцируя противоположные магнитные поля в стержнях ротора, тем самым вызывая движение.Родственный
Почему асинхронный двигатель не работает на синхронной скорости?
Асинхронный двигатель всегда работает со скоростью ниже синхронной скорости, потому что вращающееся магнитное поле, создаваемое в статоре, будет генерировать магнитный поток в роторе, заставляющий ротор вращаться , но из-за отставания магнитного потока в роторе с током потока в статоре ротор никогда не достигнет . …21 мая 2018 г.
Родственный
Каков принцип работы асинхронного двигателя?
Работа асинхронного двигателя Принцип работы этого двигателя почти такой же, как у синхронного двигателя, за исключением внешнего возбудителя.
Эти двигатели, также называемые асинхронными двигателями, работают по принципу электромагнитной индукции, при этом ротор в этом двигателе не получает электроэнергии за счет проводимости, как в случае двигателей постоянного тока.
Родственный
Какие бывают типы синхронных двигателей?
Типы синхронных двигателей: переменное сопротивление, бесколлекторное, гистерезисное и переключаемое сопротивление. Асинхронный двигатель переменного тока — это , также известный как асинхронный двигатель . Скорость двигателя не зависит от неравномерности нагрузки. Скорость двигателя снижается при увеличении нагрузки.
Родственный
В чем разница между синхронной скоростью и асинхронной скоростью?
В то время как асинхронный двигатель имеет скорость, которая всегда меньше синхронной скорости из-за скольжения.
Можно сказать, что Nas = 120f/p-slip. Где Nas означает асинхронная скорость , или мы также можем сказать Nas
Связанные
Какие бывают типы роторов асинхронных двигателей?
Более распространенный тип ротора в асинхронных двигателях (или асинхронный двигатель ) — это беличья клетка. Ротор имеет форму , аналогичную якорю с сердечником, который имеет цилиндрическую форму . Вокруг сердечника расположены параллельные щели, через которые проходит проводимость.
Родственные
В чем разница между синхронным двигателем и асинхронным двигателем? В чем разница между синхронным двигателем и асинхронным двигателем?
Основное отличие заключается в том, что асинхронный двигатель имеет фиксированную скорость (синхронный), тогда как скорость асинхронного двигателя всегда меньше скорости синхронного.
2) Почему асинхронный двигатель находит очень широкое применение в промышленности, а синхронный — нет? Этот двигатель практически не требует обслуживания и экономичен.Родственный
Почему асинхронные двигатели асинхронны? Почему асинхронные двигатели асинхронны?
Асинхронный характер работы асинхронного двигателя возникает из-за скольжения между скоростью вращения поля статора и несколько более низкой скоростью вращения ротора. Более конкретное объяснение того, как возникает это скольжение, касается деталей внутреннего устройства двигателя. Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), называемый беличьей клеткой.
Родственный
Что подразумевается под синхронным двигателем скольжения? Что подразумевается под синхронным двигателем скольжения?
Определение: Двигатель переменного тока, в котором статор не синхронизирован с ротором и может свободно вращаться со скоростью, меньшей синхронной скорости из-за скольжения.
Это связано с тем, что вращающееся магнитное поле не взаимодействует с индуцированным полем ротора.Связанные
В чем разница между RMF статора и RMF ротора в асинхронном двигателе? В чем разница между RMF статора и RMF ротора в асинхронном двигателе?
Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем RMF статора. Это связано с наличием проскальзывания между скоростью вращения его статора и ротора. Ротор асинхронного двигателя представляет собой либо короткозамкнутый ротор с обмоткой.
общий
Информация
СМИ
Нажмите
галерея
иллюстрацияПоделиться этой записью:
Двигатель постоянного тока асинхронный или синхронный.
Типы электродвигателей и принципы работы
Электродвигатель переменного тока
Электродвигатели различной мощности (750 Вт, 25 Вт, для проигрывателя компакт-дисков, для игрушки, для дисковода)
Электродвигатель — электрическая машина, в которой электрическая энергия преобразуется в механическую, побочный эффект генерация тепла.
Классификация электродвигателей
- Двигатель постоянного тока постоянного тока;
- Электродвигатели коллекторные постоянного тока… Разновидности:
- С возбуждением от постоянных магнитов;
- С параллельное соединение обмоток возбуждения и якоря;
- С последовательное соединение обмоток возбуждения и якоря;
- Со смешанным соединением обмоток возбуждения и якоря;
- Бесщеточные двигатели постоянного тока (клапанные двигатели) с электронным выключателем тока;
- Электродвигатели коллекторные постоянного тока… Разновидности:
- Электродвигатель переменного тока — электродвигатель с питанием от переменного тока двух типов:
- Электродвигатель синхронный — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения;
- Электродвигатель асинхронный — электродвигатель переменного тока, у которого частота вращения ротора отличается от частоты вращения магнитного поля, создаваемого напряжением питания.
- Однофазные — с ручным запуском, или имеют пусковую обмотку, или имеют фазосдвигающую цепь
- Многофазный
- Шаговые двигатели. Электродвигатели с конечным числом положений ротора. Заданное положение ротора фиксируется включением соответствующих обмоток. Переход в другое положение осуществляется снятием напряжения питания с одних обмоток и передачей его на другие.
- Электродвигатели вентильные — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора (ДПР), системы управления (координатного преобразователя) и силового полупроводникового преобразователя (инвертора).
- Универсальный коллекторный двигатель (УКД) представляет собой коллекторный электродвигатель, который может работать как на постоянном, так и на переменном токе.
Из-за связи с низкой частотой сети (50 Гц) асинхронные и синхронные двигатели тяжелее и тяжелее коллекторного двигателя постоянного тока и универсального коллекторного двигателя той же мощности.
При использовании выпрямителя и инвертора с частотой значительно выше 50 Гц масса и габариты асинхронных и синхронных двигателей приближаются к массе и габаритам щеточного двигателя постоянного тока и универсального щеточного двигателя той же мощности.Синхронный двигатель с датчиком положения ротора и инвертором — электронный аналог коллекторного двигателя постоянного тока.
История.
Принцип преобразования электрической энергии в механическую с помощью электромагнитного поля был продемонстрирован британским ученым Майклом Фарадеем в 1821 году и состоял из свободно висящего провода, погруженного в лужу ртути. В середине ртутной ванны был установлен постоянный магнит. Когда по проводу пропускали ток, провод вращался вокруг магнита, указывая на то, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируют на уроках физики, используя рассол вместо токсичной ртути. Это самый простой тип класса электродвигателей. Еще одним усовершенствованием является колесо Барлова.
Это было демонстрационное устройство, непригодное для практического применения из-за ограниченной мощности.Ссылки
Фонд Викимедиа. 2010.
Смотреть что такое «Двигатель переменного тока» в других словарях:
Двигатель переменного тока — — [А.С. Гольдберг. Англо-русский энергетический словарь. 2006] Темы энергии в целом EN двигатель переменного тока …
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и двухполюсным ротором двигателя постоянного тока электрической машины, ма … Википедия
Машина переменного тока, предназначенная для работы в двигательном режиме (см. Машина переменного тока). П. т. Э. подразделяются на синхронные и асинхронные. Синхронные электродвигатели (См. Синхронный электродвигатель) применяются в … …
Электрическая машина, используемая для производства переменного тока (генератор) или для преобразования электрической энергии в механическую (двигатель) или электрическую энергию другого напряжения или частоты (преобразователь) P.
t. М.… … Большая советская энциклопедияПредназначен для переменного тока машины. для работы в режиме двигателя. П. т. Э. подразделяются на синхронные и асинхронные. Синхронные электродвигатели применяются в основном в электроприводах. когда требуется постоянная угловая скорость. Из асинхронных… … Большой энциклопедический политехнический словарь
Электропривод переменного тока — Электропривод постоянного тока [переменного тока] Электропривод, содержащий электродвигатель постоянного тока [переменного тока]. [ГОСТ Р 50369 92] Тематики электропривод EN привод переменного тока привод переменного тока DE Wechselstromantrieb … Справочник технического переводчика
Электропривод постоянного тока (переменного тока) — 3.1.3 Электропривод постоянного тока (переменного тока): Привод, содержащий электродвигатель постоянного тока (переменного тока) и редуктор;
Явление электромагнитной индукции стало основой возникновения и развития всех электромобилей.
.. Пионер этого явления в конце 19 в.го века был Майкл Фарадей, английский ученый-экспериментатор. Он экспериментировал с первыми электрическими машинами… Сейчас без них невозможно представить нашу жизнь. Электродвигатели стали одними из самых распространенных электрических машин.Для работы электродвигателя необходимо напряжение, свойства которого определяют его конструкцию. На переменном напряжении и токе работают такие электродвигатели:
на постоянном напряжении и токе работают:
- коллекторные;
- однополярный;
- .
Шаговый двигатель
Электродвигатели синхронные и асинхронные
Электродвигатели синхронные и асинхронные имеют общие условия эксплуатации. Для этого необходимо магнитное поле, максимальное значение которого движется в пространстве. Такое поле может быть создано двумя и более обмотками. Типовые конструкции синхронных и асинхронных электродвигателей содержат две или три обмотки.
Размещены на массивных ферримагнитных сердечниках, усиливающих магнитное поле.
Для трех обмоток применяют трехфазное напряжение, для двух обмоток — двухфазное или однофазное с фазосдвигающим конденсатором. Но с таким конденсатором к однофазной сети можно подключать и трехфазные двигатели.Если ротор электродвигателя создает постоянное магнитное поле либо от постоянных магнитов, либо от встроенного в ротор источника постоянного тока, либо от внешнего источника постоянного тока через кольца со щетками, такой двигатель является синхронным. В нем скорость и частота питающего напряжения одинаковы. В асинхронных двигателях используется немагнитный ротор без ярко выраженных полюсов, щеточные кольца, встроенные выпрямители и комбинированные детали из разных материалов. Исключением является синхронный гистерезисный двигатель.
Ротор асинхронного двигателя работает как вторичная обмотка короткозамкнутого трансформатора. Но ток в его роторе может возникнуть только при более медленном вращении по сравнению с магнитным полем статора. Эта разница в скорости называется скольжением.
Простота конструкции и соответствующая надежность делают асинхронный электродвигатель наиболее распространенным.Коллекторные машины
Однако у синхронных и асинхронных электродвигателей есть один непреодолимый недостаток — частота питающего напряжения. Она определяет скорость вращения магнитного поля и вала в этих двигателях. Никакие конструктивные изменения в них при заданной частоте питающего напряжения не могут быть использованы для получения частоты вращения вала большей, чем частота питающего напряжения. Если требуется большая скорость, используются коллекторные двигатели.
В этих двигателях обмотки ротора постоянно коммутируются коллектором. Каждая обмотка представляет собой каркас с током, который, как известно из опытов Фарадея, вращается в магнитном поле. Но один кадр повернется и остановится. Поэтому делается несколько каркасов-обмоток и каждая из них соответствует паре пластин в коллекторе. Ток подается через щетки, скользящие по коллектору.
Конструкция такого электродвигателя допускает работу от источника как постоянного, так и переменного напряжения, обеспечивающего ток как в статоре, так и в роторе. При переменном напряжении направление тока в статоре и роторе изменяется одновременно и поэтому направление действия силы, вращающей ротор, сохраняется. Частота питающего напряжения не влияет на скорость вращения ротора. Это зависит только от величины напряжения, питающего электродвигатель. Скользящий контакт щетки с коллектором ограничивает возможности этих электродвигателей по сроку службы и месту использования, так как искрение в щетках быстро разрушает скользящий контакт и недопустимо в условиях повышенной взрывоопасности.
Однополярный и шаговый варианты
Однако существуют такие конструкции двигателей постоянного тока, в которых отсутствует коллектор. Это униполярные электродвигатели.
В этих электродвигателях ротор выполнен в виде диска, расположенного между полюсами постоянных магнитов.
Щетки, расположенные диаметрально противоположно, подают ток на диск — ротор. Диск вращается под действием силы Лоренца. Несмотря на привлекательную простоту конструкции, такой электродвигатель не имеет широкого практического применения, так как требует слишком больших значений тока и магнитного поля. Тем не менее, существуют уникальные лабораторные разработки униполярных электродвигателей со щетками из жидкого металла, развивающие немыслимые для других конструкций двигателей скорости.Шаговый двигатель представляет собой еще одну конструкцию постоянного тока.
В целом этот двигатель аналогичен синхронному электродвигателю с ротором на постоянных магнитах. Отличие в том, что количество обмоток здесь больше, и они управляются ключами, подающими напряжение питания на каждую обмотку. В результате ротор меняет свое положение, притягиваясь к подключенной обмотке. Количество обмоток определяет минимальный угол поворота ротора, а переключатели определяют скорость вращения ротора.
В шаговом двигателе ротор может вращаться практически в любом месте, так как ключи подключены к электронной схеме управления.Рассмотренные конструкции электродвигателей являются базовыми. На их основе создано множество специальных типов электродвигателей для решения тех или иных задач. Но это совсем другая история…
В быту, коммунальном хозяйстве, на любом производстве неотъемлемым узлом являются электродвигатели: насосы, кондиционеры, вентиляторы и т. д. Поэтому важно знать типы наиболее распространенных электродвигателей.
Электродвигатель представляет собой машину, преобразующую электрическую энергию в механическую. Это производит тепло, которое является побочным эффектом.
Видео: Классификация электродвигателей
Все электродвигатели можно разделить на две большие группы:
- Двигатели постоянного тока
- Двигатели переменного тока.
Двигатели переменного тока
называются двигателями переменного тока, которые бывают двух разновидностей:
- Синхронные — это те, в которых ротор и магнитное поле питающего напряжения вращаются синхронно.
- Асинхронные … У них частота вращения ротора отличается от частоты, создаваемой напряжением питания магнитного поля. Они бывают многофазными, а также одно-, двух- и трехфазными.
- Шаговые двигатели отличаются тем, что имеют конечное число положений ротора. Неподвижное положение ротора фиксируется подачей питания на определенную обмотку. Сняв напряжение с одной обмотки и передав его на другую, осуществляется переход в другое положение.
К двигателям постоянного тока относятся те, которые питаются от постоянного тока. Они в зависимости от наличия или отсутствия щеточно-коллекторного узла делятся на:
Коллекторные также, в зависимости от вида возбуждения, бывают нескольких видов:
- С возбуждением от постоянных магнитов.
- С параллельным соединением соединительной и якорной обмоток.
- С последовательным соединением якоря и обмоток.
- Со смешанной их смесью.
Секционный электродвигатель постоянного тока.
Щеточный коллектор — правый Какие электродвигатели входят в группу «Двигатели постоянного тока»
Как уже было сказано, двигатели постоянного тока составляют группу, включающую коллекторные двигатели и бесщеточные двигатели, которые выполнены в виде замкнутой системы, включающей датчик положения ротора, систему управления и силовой полупроводниковый преобразователь. Принцип работы бесщеточных электродвигателей аналогичен принципу работы асинхронных двигателей. Они устанавливаются в бытовых приборах, таких как вентиляторы.
Что такое коллекторный двигатель
Длина двигателя постоянного тока зависит от класса. Например, если речь идет о двигателе класса 400, то его длина будет составлять 40 мм. Отличием коллекторного электродвигателя от бесколлекторного аналога является простота изготовления и эксплуатации, поэтому его стоимость будет ниже. Их особенностью является наличие щеточно-коллекторного узла, с помощью которого цепь ротора соединяется с цепями, расположенными в неподвижной части двигателя.
Он состоит из расположенных на роторе контактов – коллектора и прижатых к нему щеток, расположенных вне ротора.Ротор
Данные электродвигатели используются в радиоуправляемых игрушках: подачей напряжения от источника постоянного тока (та же батарея) на контакты такого двигателя приводится в движение вал . А для изменения его направления вращения достаточно изменить полярность подаваемого напряжения питания. Небольшой вес и габариты, невысокая цена и возможность восстановления щеточно-коллекторного механизма делают эти электродвигатели наиболее применяемыми в бюджетных моделях, несмотря на то, что по надежности он значительно уступает бесщеточному, так как не исключено искрение, чрезмерный нагрев подвижных контактов и их быстрый износ при воздействии пыли, грязи или влаги.
Коллекторный двигатель обычно маркируется числом оборотов: чем оно меньше, тем выше скорость вращения вала. Он, кстати, очень плавно регулируется. Но, есть быстроходные моторы этого типа, не уступающие бесколлекторным.
Преимущества и недостатки бесколлекторных двигателей
В отличие от описанных, в этих электродвигателях подвижной частью является статор с постоянным магнитом (корпусом), а ротор с трехфазной обмоткой неподвижен.
К недостаткам этих двигателей постоянного тока можно отнести менее плавную регулировку скорости вращения вала, но они способны набирать максимальную скорость за доли секунды.
Бесщеточный электродвигатель размещен в закрытом корпусе, поэтому он более надежен при неблагоприятных условиях эксплуатации, т.е. ему не страшны пыль и влага. Кроме того, его надежность повышается за счет отсутствия щеток, как и скорость вращения вала. При этом конструкция мотора более сложная, поэтому он не может быть дешевым. Его стоимость, по сравнению с коллектором, в два раза выше.
Таким образом, коллекторный двигатель переменного и постоянного тока универсален, надежен, но дороже. Он легче и меньше, чем двигатель переменного тока той же мощности.
Поскольку двигатели переменного тока с питанием от 50 Гц (промышленный источник питания) не позволяют получить высокие частоты (выше 3000 об/мин), при необходимости используется коллекторный двигатель.
При этом его ресурс ниже, чем у асинхронных двигателей переменного тока, что зависит от состояния подшипников и изоляции обмоток.
Как работает синхронный двигатель
Синхронные машины часто используются в качестве генераторов. Он работает синхронно с частотой сети, поэтому с датчиком положения инвертора и ротора является электронным аналогом коллекторного двигателя постоянного тока.
Структура синхронного двигателя
Свойства
Эти двигатели не являются самозапускающимися механизмами, но требуют внешнего воздействия для увеличения скорости. Они нашли применение в компрессорах, насосах, прокатных станках и подобном оборудовании, рабочая скорость которых не превышает пятисот оборотов в минуту, но требуется увеличение мощности.
Они имеют достаточно большие размеры, имеют «приличный» вес и высокую цену.Существует несколько способов запуска синхронного двигателя:
- Использование внешнего источника тока.
- Запуск асинхронный.
В первом случае с помощью вспомогательного двигателя, которым может быть двигатель постоянного тока или асинхронный трехфазный двигатель. Первоначально на двигатель не подается постоянный ток. Он начинает вращаться, достигая скорости, близкой к синхронной. В этот момент подается постоянный ток. После замыкания магнитного поля связь с вспомогательным двигателем разрывается.
Во втором варианте необходимо установить в полюсные наконечники ротора дополнительную короткозамкнутую обмотку, пересекая которую магнитное вращающееся поле индуцирует в нем токи. Они, взаимодействуя с полем статора, вращают ротор. Пока не достигнет синхронной скорости. С этого момента момент и ЭДС уменьшаются, магнитное поле замыкается, уменьшая момент до нуля.
Эти электродвигатели менее чувствительны, чем асинхронные, к колебаниям напряжения, обладают высокой перегрузочной способностью, сохраняют одинаковую скорость при любой нагрузке на вал.
Электродвигатель однофазный: устройство и принцип работы
Использующий только одну статорную обмотку (фазу) после пуска и не требующий собственного преобразователя, электродвигатель, работающий от однофазной сети переменного тока, асинхронный или одиночный -фаза.
Электродвигатель однофазный имеет вращающуюся часть — ротор и неподвижную часть — статор, которая создает магнитное поле, необходимое для вращения ротора.
Из двух обмоток, расположенных в сердечнике статора друг к другу под углом 90 градусов, рабочий занимает 2/3 слотов. Другая обмотка, на долю которой приходится 1/3 пазов, называется пусковой (вспомогательной).
Ротор также имеет короткозамкнутую обмотку. Его стержни из алюминия или меди закрыты на концах кольцом, а пространство между ними заполнено алюминиевым сплавом.
Ротор может быть выполнен в виде полого ферромагнитного или немагнитного цилиндра.Электродвигатель однофазный, мощность которого может быть от десятков ватт до десятков киловатт, применяется в бытовых приборах, устанавливается в деревообрабатывающих станках, на конвейерах, в компрессорах и насосах. Их преимуществом является возможность использования в помещениях, где нет трехфазной сети. По конструкции они мало чем отличаются от асинхронных электродвигателей трехфазного тока.
Чтобы понять, как работает двигатель переменного тока, давайте поместим изогнутый проводник в однородное магнитное поле, создаваемое полюсами магнита.
Отличием генераторов от генераторов является отсутствие коллектора.
Электродвигатели асинхронные трехфазные являются прямыми потребителями электроэнергии трехфазного тока. Такие модели используются во многих отраслях.
На рис. 2 показана схема двигателя переменного тока. Синхронный генератор имеет такой же статор рис.
1. Питание обмотки статора переменным током происходит от трехфазной сети.Изменение тока в фазах произойдет и в фазах генератора. На рис. 2 ротор представлен в виде щелевого цилиндра, который установлен на медных или алюминиевых стержнях, соединенных кольцами на поверхностях ротора с торца.
Ток течет в закороченных проводниках. Вращение ротора асинхронного устройства отличается от частоты магнитного поля.
Рисунок: 1 Принцип работы генератора.
При одинаковом вращении проводники обмотки ротора перестают пересекать магнитное поле, а затем исчезает крутящий момент. потому что двигатель переменного тока и получил название асинхронный (т.е. асинхронный). Круговое вращающееся магнитное поле условно представляют полем полюсов постоянных магнитов, которые вращаются с частотой. Помещая ротор в поле статора асинхронного трехфазного устройства с короткозамкнутой обмоткой (рис. 3), вращающееся поле статора проходит по проводникам обмотки ротора и направляет их на ЭДС.
Направление ЭДС определяется по правилу правой руки. Когда обмотка ротора замкнута, в ее проводниках возникают токи. Ток любого проводника ротора, взаимодействуя с полем статора, образует электромагнитную силу, течение которой определяется правилом левой руки.Группа электромагнитных сил образует электромагнитный момент, который приводит ротор в вращение с частотой в направлении поля вращения. Электрическая энергия, поступающая в обмотку статора из сети, реорганизуется в механическую энергию для вращения ротора.
Рисунок: 2 Трехфазный асинхронный двигатель
Рисунок: 3 Схема однофазного электродвигателя
Частота вращения двигателя переменного тока всегда меньше частоты вращения поля статора, поэтому его название асинхронный. Когда ротор АД вращается с частотой, то проводники обмотки ротора не пересекают поле статора. Следовательно, в них не индуцируется ЭДС, не возникают токи и не создается вращающий момент.
Разница между скоростями возбуждения ротора и статора называется частотой скольжения .
На практике чаще используется понятие скольжения — отношение частоты вращения поля статора к частоте скольжения:Также существует зависимость между скоростью вращения ротора и скольжением:
При работе АД частота вращения ротора изменяется от момента пуска двигателя до идеального холостого хода . Следовательно, в режиме работы двигателя асинхронной машины широта скольжения изменяется от 1 до 0. Частота вращения ротора, а значит, и скольжение, зависит от нагрузки на валу (внешний момент сопротивления). По мере увеличения нагрузки скорость вращения ротора уменьшается, а скольжение увеличивается. В асинхронных устройствах общего назначения начальное скольжение есть, т.е. при начальной нагрузке ротор АД вращается с частотой, близкой к частоте вращения поля. Частота ЭДС и токов, наводимых в проводах ротора, определяется частотой скольжения. Учитывая, что мы определяем.
Постоянное переключение батареи эквивалентно подаче питания переменного тока на оборудование.
Разница лишь в том, что такой переменный ток имеет низкую частоту, так как за секунду можно перевернуть батарею 3-5 раз, в то время как у переменного тока направление меняется 100 раз в секунду.Если два проводника от понижающего трансформатора подключить к клеммам устройства с тем же напряжением, что и аккумулятор, то устройство с двигателем переменного тока будет работать. Однако его якорь будет вращаться несколько медленнее, чем если бы он питался от постоянного тока. При переменном токе появляется индуктивное сопротивление обмоток двигателя. Дотронувшись рукой до его тела через 10-15 минут можно увидеть, что оно нагрелось.
Этого не происходит при работе от батареи. При питании переменным током в стенках корпуса и в полюсах появляются потери от перемагничивания переменным током и вихревых токов. Для уменьшения этих потерь корпус и полюса модели однофазного коллектора переменного тока собирают из штампованных листов электротехнической стали, которые изолируют лаковой пленкой один от другого и скрепляют заклепками (рис.
4).Рис. 4 Статор коллекторного двигателя
1 — Катушка; 2 — полюсный наконечник; 3 — заклепка.
Коллекторные двигатели переменного тока работают только с последовательным возбуждением и, благодаря параллельной катушке возбуждения, имеют огромное индуктивное сопротивление при переменном токе.
Механические свойства однофазного устройства аналогичны свойствам двигателя постоянного тока с последовательным возбуждением. Вследствие этого их применяют, когда от устройства требуется высокая пусковая и большая перегрузочная способность.
Применение Коллекторные электродвигатели рассчитаны на любую скорость вращения, а асинхронные, питающиеся от переменного тока частотой 50 Гц, имеют максимальную синхронную скорость 3000 об/мин. Эта особенность делает коллекторные модели незаменимыми для бытовой техники, в частности, для пылесосов. Коллекторные устройства в 2-3 раза легче асинхронных однофазных.
Такие электродвигатели изготавливаются на низкое напряжение с питанием от понижающего трансформатора и на напряжение сети 127 или 220 В.
Для снижения риска поражения электрическим током данные устройства применяются в подвижных игрушках (электропоездах, краны).Электродвигатели переменного тока используются в пылесосах, швейных машинах, электробритвах и других электроприборах.
Электрическая энергия преобразуется в механическую с помощью электродвигателя. Мощность, число оборотов в минуту, напряжение и тип мощности являются основными показателями электродвигателей. Также большое значение имеют весовые, габаритные и энергетические показатели.
Электродвигатели имеют большие преимущества. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по габаритам электродвигатели гораздо компактнее. Они идеально подходят для небольших площадей, таких как трамваи, электровозы и различные станки.
При их использовании не выделяется пар и продукты разложения, что обеспечивает экологичность. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые двигатели, серводвигатели и линейные двигатели.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
Двигатели постоянного тока
Применяются для создания приводов с регулируемой скоростью с высокими динамическими и эксплуатационными характеристиками. К таким показателям относятся высокая равномерность вращения и перезаряжающая способность. Ими комплектуются бумагоделательные, красильно-отделочные и подъемно-транспортные машины, полимерное оборудование, буровые установки и вспомогательные агрегаты экскаваторов. Они часто используются для оснащения всех типов электромобилей.
Двигатели переменного тока
Они пользуются большим спросом, чем двигатели постоянного тока. Они часто используются в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Почти все бытовые приборы оснащены двигателями переменного тока. Применяются в стиральных машинах, вытяжках и т.
д. В крупной промышленности используются для привода станков, лебедок для перемещения тяжелых грузов, компрессоров, гидравлических и пневматических насосов, промышленных вентиляторов.Шаговые двигатели
Действуют по принципу преобразования электрических импульсов в механическое движение дискретного характера. Ими оснащена большая часть офисной и компьютерной техники. Эти двигатели очень маленькие, но очень эффективные. Иногда они востребованы в определенных отраслях.
Серводвигатели
Относится к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется за счет использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерной поддержки. Эта функция делает его востребованным при оснащении производственных линий и в современных промышленных машинах.
Линейные двигатели
Обладают уникальной способностью перемещать ротор и статор по прямой линии относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и обратном движении рабочих органов. Применение линейного электродвигателя позволяет повысить надежность и экономичность механизма за счет того, что значительно упрощает его эксплуатацию и практически полностью исключает механическую передачу.
Синхронные двигатели
Это разновидность двигателей переменного тока. Скорость вращения их ротора равна частоте вращения магнитного поля в воздушном зазоре. Они используются для компрессоров, больших вентиляторов, насосов и генераторов постоянного тока, поскольку они работают с постоянной скоростью.
Асинхронные двигатели
Также они относятся к категории двигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током в обмотке статора.
.
.