Содержание
Драйвер для биполярного шагового двигателя схема
Ниже представлена принципиальная схема драйвера биполярных шаговых двигателей с двумя L усиленный 48В, 4А. Данный драйвер может использоваться для управления практически любых 2-фазных биполярных гибридных шаговиков с 4 выводами и может обеспечить ток работы до 4 ампер при максимальном напряжении 35В. Цепочкой R9 и C15 можно подбирать частоту ШИМ, при указанных номиналах она выше диапазона слышимых звуков, так что движок не жужжит. Потенциометром RV1 устанавливается рабочий ток двигателя. Если будете гонять на максимальной мощности , то нужно обязательно посадить его на хороший радиатор и поставить кулер, также не забудьте намазать термопастой.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Это интересно!
- Шаговые двигатели и особенности их применения
- Схема простого драйвера для униполярного шагового двигателя
- Схемы управления шаговыми двигателями
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
- Шаговый двигатель
- Как запустить шаговый двигатель схема
- Как запустить шаговый двигатель схема
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Драйвер для Шагового Двигателя Своими Руками Схема
 youtube.com/embed/x4EBfZRVgpw» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/x4EBfZRVgpw» frameborder=»0″ allowfullscreen=»»/>
Это интересно!
Ежедневно в мире производится более 20 млн. В статье обсуждаются особенности построения эффективных систем управления электродвигателями с использованием FPGA, возможности применения FPGA в промышленных сетях и вопросы выбора оптимальной системы управления электроприводом. В настоящее время вопросы повышения энергоэффективности электроприводов выходят на первый план в промышленных приложениях.
В статье рассмотрены такие методы улучшения КПД электродвигателя как применение оптимальных алгоритмов управления и контроль коэффициента мощности ККМ. Показано, что активная ККМ позволяет существенно улучшить энергоэффективность системы. Метод управления ориентацией поля в электроприводах с регулированием скорости вращения улучшает динамические параметры, позволяет выбрать оптимальный электродвигатель и улучшить эффективность системы.
В статье описаны базовые принципы метода, построение схемы управления и применение цифровых сигнальных контроллеров для эффективной реализации системы. Статья представляет собой перевод [1]. Продукция этой фирмы характеризуется высоким качеством и уровнем интеграции аналоговой и цифровой технологий. Одной из удачных разработок компании в г. По сути, она ознаменовала очередной этап эволюции архитектуры и технологии драйверов шаговых двигателей ШД. Для того чтобы по достоинству оценить уровень разработок AMIS, рассмотрим процесс эволюции микросхем для ШД от различных производителей.
Статья представляет собой перевод [1]. Продукция этой фирмы характеризуется высоким качеством и уровнем интеграции аналоговой и цифровой технологий. Одной из удачных разработок компании в г. По сути, она ознаменовала очередной этап эволюции архитектуры и технологии драйверов шаговых двигателей ШД. Для того чтобы по достоинству оценить уровень разработок AMIS, рассмотрим процесс эволюции микросхем для ШД от различных производителей.
Шаговые двигатели были разработаны в начале гг. Главное преимущество ШД — обеспечение точного позиционирования без применения датчиков положения обратной связи. Это преимущество значительно снизило цену систем приводов компьютерной периферии и сделало ее массовым и доступным изделием. По мере совершенствования параметров, удешевления производства, а также упрощения и удешевления схем управления шаговые двигатели завоевали популярность и в других приложениях.
Униполярные двигатели проще в управлении и требуют меньше управляющих элементов. Ранее этот фактор имел решающее значение в цене готового решения. После того, как значительно повысился уровень интеграции и снизилась цена микросхем драйверов, униполярные шаговые двигатели потеряли это преимущество. Если сравнивать их между собой, то биполярный ШД имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент, который пропорционален магнитному полю, создаваемому обмотками статора.
После того, как значительно повысился уровень интеграции и снизилась цена микросхем драйверов, униполярные шаговые двигатели потеряли это преимущество. Если сравнивать их между собой, то биполярный ШД имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент, который пропорционален магнитному полю, создаваемому обмотками статора.
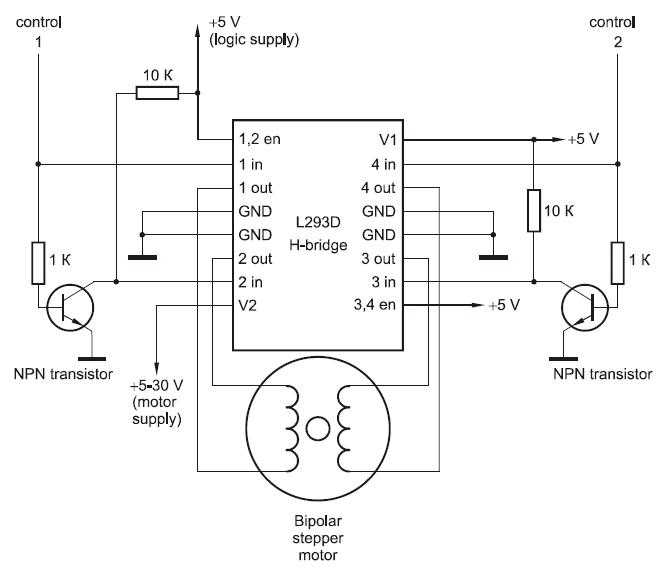
Именно биполярные шаговые двигатели в основном выпускаются производителями. Двигатель имеет две обмотки, каждая из которых управляется мостовой схемой ключей. На рисунке 1 показана базовая схема управления биполярным шаговым двигателем. Для требуемой фазировки токов через обмотки внешняя схема должна обеспечить синхронное управление ключами двух мостовых схем.
Первые схемы управления шаговыми двигателями были реализованы полностью на дискретных элементах и микросхемах комбинационной логики. Базовая схема управления биполярным шаговым двигателем. Первым этапом интеграции стала реализация в одном корпусе элементов моста и простой логики управления его ключами.
Примером такой микросхемы является UC фирмы Unitrode в настоящее время часть TI , которая была разработана до г.
Для управления двигателем требовалось использовать две такие микросхемы и внешний контроллер шаговых перемещений. Применялся линейный токовый режим с большими потерями мощности на обмотках и биполярных транзисторах. Компания Infineon примерно в то же время г. В структуру драйвера стали вводить датчики выходного тока для слежения за токовой перегрузкой в мостовых схемах.
Контроль тока производился отдельно в каждом мосту в нижнем плече через внешний резистивный датчик. Сигналы перегрузки по каждому каналу управления обмотками были доступны внешнему управляющему контроллеру в виде сигналов ошибки открытый коллектор. На следующем этапе эволюции структуры драйвера для снижения потерь в мостовых схемах биполярные транзисторы заменили на DMOS.
Кроме того, стал использоваться метод ШИМ токового управления, который позволил значительно уменьшить рассеиваемую на драйвере мощность.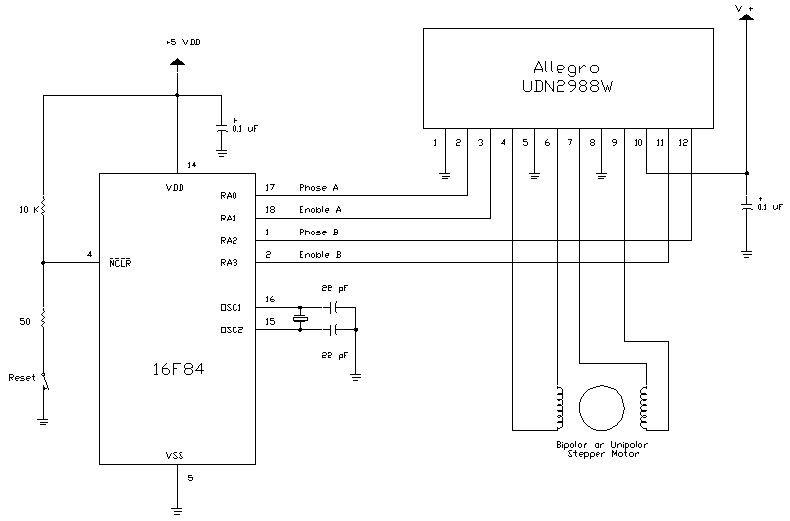 В структуре драйвера появились схемы защиты от перегрузки по току и перегрева кристалла, схемы обнаружения обрыва обмоток и короткого замыкания. Был добавлен режим энергосбережения. На рисунке 2 показаны диаграммы сигналов управления обмотками шагового биполярного двигателя для различных режимов. Обычно используется полношаговый или полушаговый режимы. Драйверы для их поддержки существенно проще и дешевле.
В структуре драйвера появились схемы защиты от перегрузки по току и перегрева кристалла, схемы обнаружения обрыва обмоток и короткого замыкания. Был добавлен режим энергосбережения. На рисунке 2 показаны диаграммы сигналов управления обмотками шагового биполярного двигателя для различных режимов. Обычно используется полношаговый или полушаговый режимы. Драйверы для их поддержки существенно проще и дешевле.
Диаграммы сигналов для управления шаговым двигателем Микрошаговый режим позволяет осуществлять дробление основного шага на несколько позиций и получать непосредственно без редуктора большую точность позиционирования вала двигателя.
Allegro Microsystems была первой фирмой, которая разработала и начала серийный выпуск недорогих интегральных драйверов SLAM и SLAM для двигателей, которые поддерживали режим микрошагового управления г.
На следующем этапе в структуру драйвера была добавлена логика, которая упростила управление двигателем и снизила нагрузку на внешний контроллер.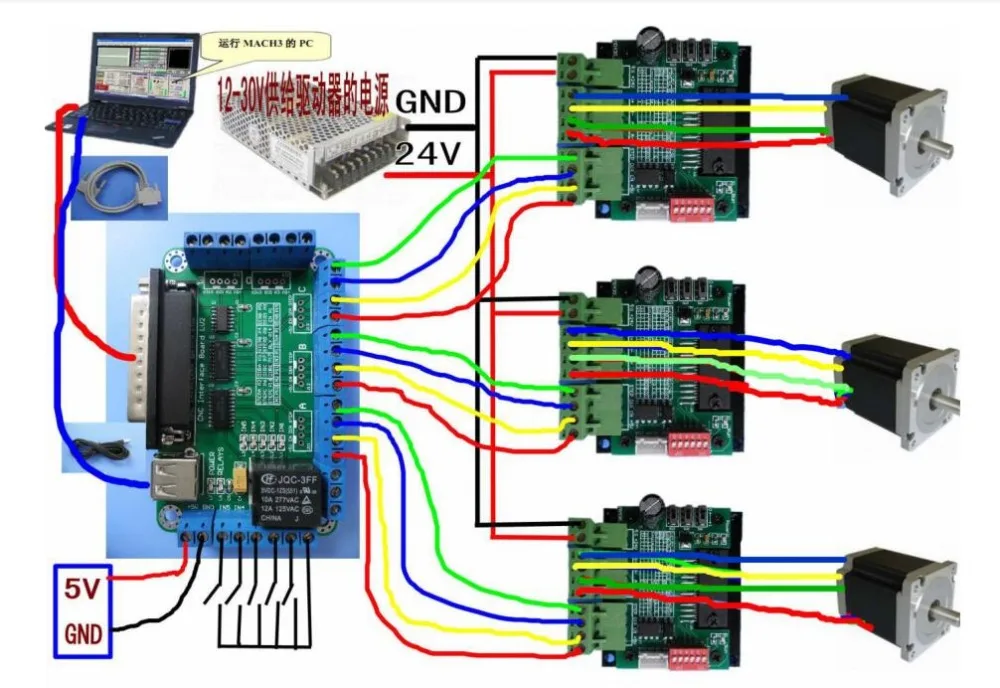 Отныне для управления вращением вала на один шаговый угол требовались всего два сигнала — сигнал направления DIR и тактовый сигнал CLK или NXT , задающий скорость вращения. Этот интерфейс впервые появился у драйверов Allegro Microsystems и в дальнейшем стал использоваться в драйверах других производителей. Шаговые двигатели имеют ряд особенностей управления, связанных с инерционностью вала двигателя с нагрузкой и дискретностью движений вала.
Отныне для управления вращением вала на один шаговый угол требовались всего два сигнала — сигнал направления DIR и тактовый сигнал CLK или NXT , задающий скорость вращения. Этот интерфейс впервые появился у драйверов Allegro Microsystems и в дальнейшем стал использоваться в драйверах других производителей. Шаговые двигатели имеют ряд особенностей управления, связанных с инерционностью вала двигателя с нагрузкой и дискретностью движений вала.
После выполнения каждого шага под управлением токовых импульсов, поданных на обмотки, производилась фиксация вала за счет закорачивания цепей обмоток режим Slow или переполюсовки сигналов для более быстрой фиксации Fast см. Для преодоления этих недостатков потребовалась обратная связь, возможность изменять режимы управления фазами разгона и торможения при выполнении шага и др.
После оценки сигнала обратной связи можно выработать стратегию для изменения параметров управляющих сигналов. Например, если ситуация соответствует зоне проскока на шаг вперед, значит, для данного скоростного режима недостаточна сила торможения. В этом случае можно уменьшить ток активной фазы или использовать режим быстрого торможения. В руководстве по драйверам приводятся методики для выбора оптимальных параметров управления. Для адаптации параметров управляющих сигналов под конкретные параметры двигателя и режим движения, а также возможности динамической подстройки параметров сигналов для устранения потери шага, резонансного эффекта, повышения динамики на больших скоростях был добавлен последовательный интерфейс и соответствующие схемы цифровой регулировки параметров.
В этом случае можно уменьшить ток активной фазы или использовать режим быстрого торможения. В руководстве по драйверам приводятся методики для выбора оптимальных параметров управления. Для адаптации параметров управляющих сигналов под конкретные параметры двигателя и режим движения, а также возможности динамической подстройки параметров сигналов для устранения потери шага, резонансного эффекта, повышения динамики на больших скоростях был добавлен последовательный интерфейс и соответствующие схемы цифровой регулировки параметров.
Параметры загружались в соответствующие режимные регистры. Этот уровень был впервые использован в микросхемах драйверов Allegro Microsystems, а затем появился в структурах драйверов STMicroelectronics, TI, Infineon.
К началу разработки компанией AMIS своей архитектуры драйверов на рынке уже присутствовали драйверы шаговых двигателей, которые имели, с одной стороны, достаточно высокий уровень интеграции, а с другой — набор функциональных параметров, обеспечивавших реализацию оптимальной и дешевой схемы управления. В качестве примера такого драйвера можно привести драйвер-контроллер А Allegro Microsystems. Для его управления использовался ШИМ, в мостовых схемах — полевые ключи; были реализованы различные типы защит от перегрузок.
В качестве примера такого драйвера можно привести драйвер-контроллер А Allegro Microsystems. Для его управления использовался ШИМ, в мостовых схемах — полевые ключи; были реализованы различные типы защит от перегрузок.
Загрузка параметров и управление движением производилась через последовательный интерфейс. Поддерживался режим микрошага. В обеих мостовых схемах использовались два внешних резистивных токовых датчика для контроля перегрузки. Для улучшения формы кривой при микрошаговом режиме в А применялось автоматическое изменение режима спада тока в зависимости от текущего микрошага Mixed Decay Mode.
При ее разработке требовалось создать модульную архитектуру для реализации линейки микросхем с функциональными параметрами, ориентированными на различные варианты применения с разными уровнями цен. Степень интеграции и функциональности должна была соответствовать лучшим на то время образцам интегральных драйверов-контроллеров.
В архитектуре требовались модули, обеспечивавшие расширенные функциональные возможности. На рисунке 4 показана модульная архитектура линейки драйверов AMISxxx. Архитектура микросхем драйверов AMISxxx Белые поля соответствуют резидентным модулям, которые присутствуют во всех микросхемах семейства. Цветными полями маркированы необязательные модули, определяющие специфику и назначение микросхемы драйвера.
На рисунке 4 показана модульная архитектура линейки драйверов AMISxxx. Архитектура микросхем драйверов AMISxxx Белые поля соответствуют резидентным модулям, которые присутствуют во всех микросхемах семейства. Цветными полями маркированы необязательные модули, определяющие специфику и назначение микросхемы драйвера.
В семейство AMISxxx входит семь микросхем A—G , различающихся интерфейсом управления, поддержкой некоторых функций и электрическими характеристиками см. Они отличаются некоторыми функциональными элементами, применением и, что особенно важно, ценой. Первая серия микросхем AMISxx см. При разработке большинства современных приложений она может служить отличной и недорогой альтернативой драйверам Allegro Microsystems, Infineon, Toshiba, TI, National Semiconductor, ROHM, обеспечивая функциональную совместимость.
Их интерфейс управления образован последовательным портом SPI для конфигурирования и мониторинга и специализированными линиями ввода-вывода, в т.
DIR direction определяет направление вращения, а сигнал на входе NXT Next подается в качестве команды для выполнения очередного шага поворота вала.![]()
Скорость движения и режим дробления шага устанавливаются предварительно через режимные регистры драйвера. Работая совместно с внешним микроконтроллером, ИС AMISxx выполняет преобразование заданной команды управления путем генерации на выходе драйверного каскада ШИМ-сигналов. Эта функция открывает широкие возможности по контролю и анализу работы ШД, обнаружению пропуска шага и возврата на шаг назад, введению обратных связей по положению и скорости, не требуя применения каких-либо дополнительных внешних компонентов.
Используется тот же сигнал противо-ЭДС и интегрированный автомат, изменяющий динамические параметры сигналов управления. Вход SWI можно использовать при отладке рабочих режимов или в штатном режиме типа концевика. Алгоритм управления AMISXX реализован в виде конечного автомата, то есть разработчику следует подать команду переместить двигатель в определенное положение, предварительно задав необходимое ускорение и максимальную скорость, а также требуемый размер микрошага.
Определяются рядом уровней нарастающих или спадающих напряжений, которые будут использоваться при выполнении соответствующей фазы по команде, поданной через сетевой интерфейс. Хост-контроллер при этом освобождается от локального контроля данных процессов. Для контроля используется встроенный запрограммированный пользователем автомат.
Заданы начальные и конечные точки процессов, определены ряды значений, устанавливающие степень ускорения и торможения. Выбор за разработчиком. Собственно, наличие счетчика числа шагов не всегда облегчает задачу, если в устройстве так или иначе используется микроконтроллер либо DSP. Расчет траектории производится программно. В большинстве приложений ресурс управляющего микроконтроллера достаточен для того, чтобы решать сложные задачи в реальном масштабе времени.
Поскольку не во всех случаях потребуются предельные режимы движения шагового двигателя, то не понадобится и сложный алгоритм управления динамическими параметрами драйвера. Реализованный в микросхеме интерфейс SPI можно использовать для задания таких параметров драйвера как амплитуда тока, шаговый режим, частота ШИМ.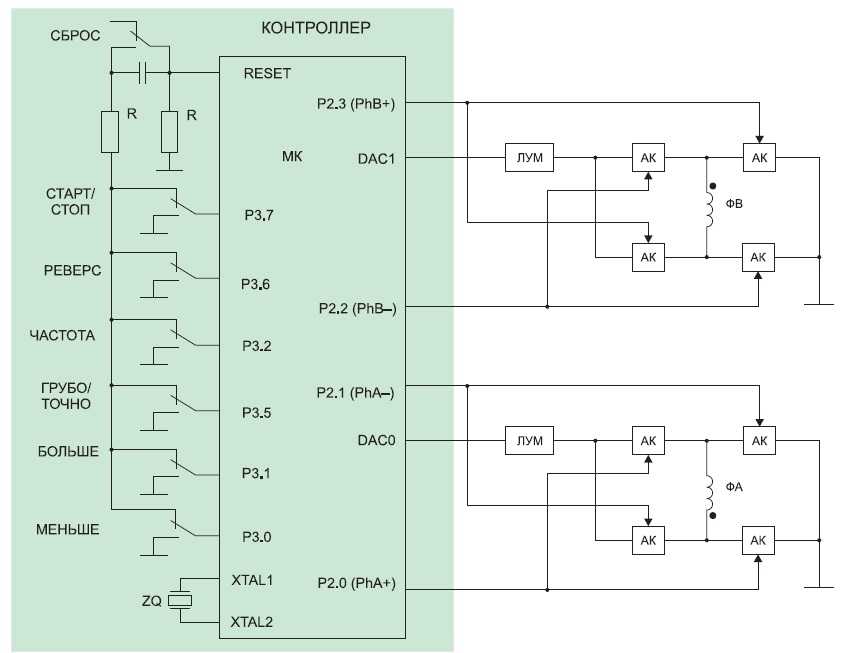 Микросхема драйвера, в свою очередь, передает в микроконтроллер статусы флагов состояния. В состав обоих семейств драйверов шаговых двигателей ON Semiconductor входит обратная связь, которая позволяет сравнивать электрическое и расчетное положение ротора, что можно использовать для контроля функционирования двигателя.
Микросхема драйвера, в свою очередь, передает в микроконтроллер статусы флагов состояния. В состав обоих семейств драйверов шаговых двигателей ON Semiconductor входит обратная связь, которая позволяет сравнивать электрическое и расчетное положение ротора, что можно использовать для контроля функционирования двигателя.
Драйвер AMIS идеально подходит для позиционирования подвижных элементов небольших устройств. Его основные приложения: коррекция угла наклона ламп в автомобильных фарах, кондиционеры, привод холостого хода двигателей, механика систем круиз-контроля, промышленное оборудование, устройства домашней автоматизации. Достигнутый благодаря новой технологии уровень интеграции позволил получить миниатюрный драйвер и уменьшить число сигналов управления.
Возможность объединения в одной ИС аналоговых и силовых каскадов на повышенные напряжения, а также низковольтных цифровых каскадов сделало возможным появление полностью интегрированных контроллеров ШД. Собственно двигатель получил цифровой интерфейс.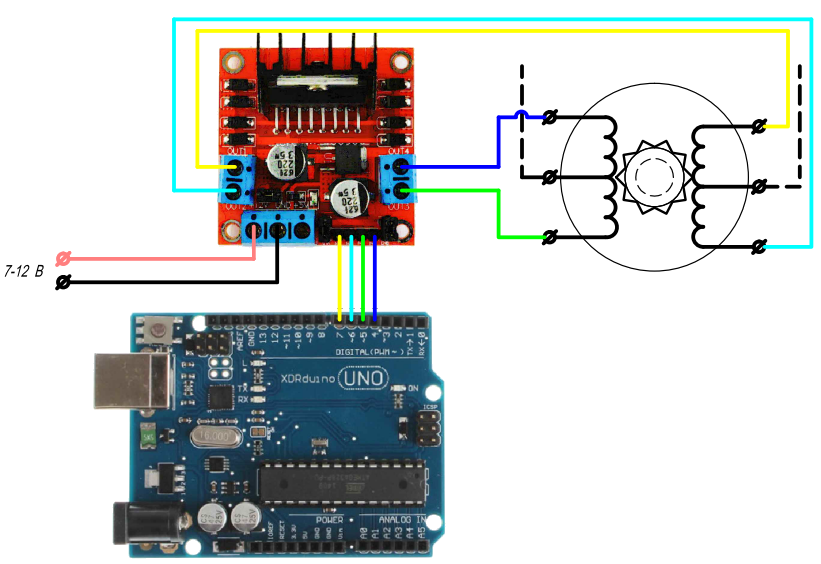
Шаговые двигатели и особенности их применения
Началось мое станкостроение со случайной ссылки на немецкий станок за DM, который на мой взгляд выглядел по детски, однако мог выполнять довольно много занятных функций. В тот момент, меня заинтересовала возможность рисовать платы это было еще до появления в моей жизни ЛУТ. В результате протяженных поисков в сети было найдено несколько сайтов посвященных этой проблеме, однако русскоязычных среди них не было ни одного это было примерно 3 года назад. Все собрал, запустил.
Шаговые двигатели и моторы Ардуино 28BYJ с драйвером ULN . Еще одна схема подключения биполярного шагового двигателя Nema
Схема простого драйвера для униполярного шагового двигателя
OpenRobo Производство на роботах. Драйвер шагового двигателя своими руками Содержание этой части обучения. Как крутить шаговый двигатель. Программа для микроконтроллера на двигатель. Nema Шнур с вилкой. Индикаторная отвертка. Соединитель Nema Драйвер IR Транзистор IRFN.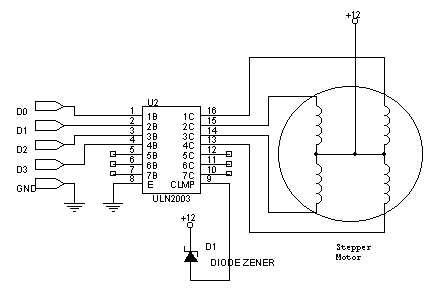
Схемы управления шаговыми двигателями
Предыстория Понадобилось мне прошлой осенью восстановить измерительный стенд. Одна из главных частей стенда — система протяжки лески с закрепленной на ней трубочке сквозь СВЧ-резонатор это такая медная банка весом кг. Причем протяжка должна осуществляться периодически с фиксацией положения на 1мм подвинул, остановился, подождал секунду, ещё на 1мм подвинул, и так далее. Естественно сразу возникла мысль о шаговом двигателе ШД. Но как им управлять?
Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода.
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
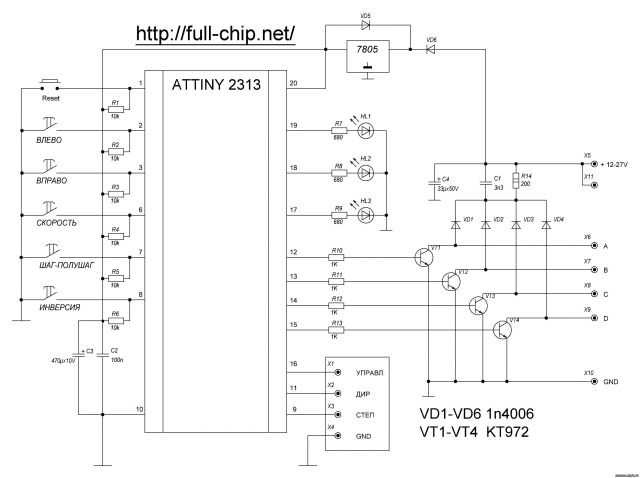
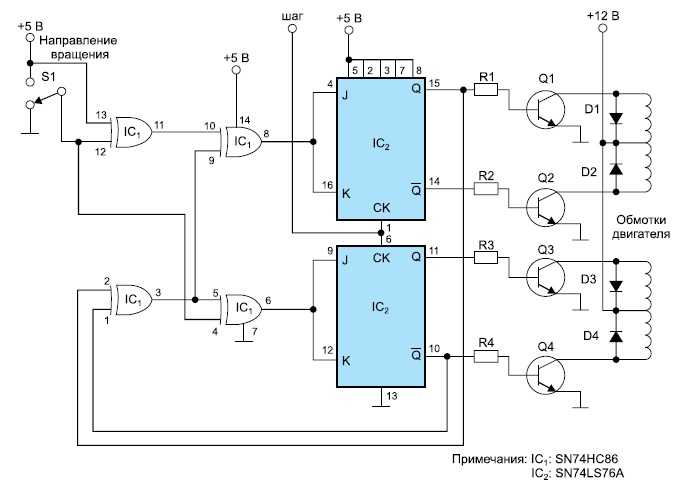
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение прошивка для него. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности. Контроллер не имеет защиты от коротких замыканий обмоток двигателя. Но реализация этой функции значительно усложняет схему, а замыкание обмоток — случай крайне редкий. Я с таким не сталкивался.
Но реализация этой функции значительно усложняет схему, а замыкание обмоток — случай крайне редкий. Я с таким не сталкивался.
Шаговый двигатель
Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер т. Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности. Однако большинство драйверов предназначено для управления биполярными двигателями. Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем. Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя? Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Функциональная схема блока управления шаговым двигателем .. 33 . Основная задача драйвера шагового двигателя заключается в том, что бы . низкий момент, чем у биполярного двигателя тех же габаритов. Тем не.
Как запустить шаговый двигатель схема
Для управления шаговыми двигателями используют специальные устройства — драйверы шаговых двигателей. Популярный драйвер шагового двигателя А работает от напряжения В и может обеспечить ток до 1 А на фазу без радиатора. Рисунок 4.
Как запустить шаговый двигатель схема
Предшественником шагового двигателя является серводвигатель. Шаговые импульсные двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода сервопривода разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства меньше элементов и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала. Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2]. Поэтому в задачах, где требуются высокие характеристики точность, быстродействие используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2]. Поэтому в задачах, где требуются высокие характеристики точность, быстродействие используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Драйвер шагового двигателя своими руками — хотя биполярные шаговые двигатели относительно дороги, для своих физических размеров они обеспечивают высокий вращающий момент.
В статье рассматриваются типы шаговых двигателей, особенности их применения и схемы несложных устройств управления, позволяющие оценить возможности и освоить этот тип двигателей на практике. Статья написана на основании опыта автора по использованию шаговых двигателей в робототехнике. А именно для систем синхронной связи на постоянном токе. Скорость вращения шагового двигателя определяется только частотой следования импульсов управления. Для устройств на основе шаговых двигателей, как правило, не требуется концевых выключателей или каких-то конечных сенсоров. При этом подсчитываются импульсы ЭДС, генерируемые обмоткой двигателя при вращении его ротора внешней силой.
Для устройств на основе шаговых двигателей, как правило, не требуется концевых выключателей или каких-то конечных сенсоров. При этом подсчитываются импульсы ЭДС, генерируемые обмоткой двигателя при вращении его ротора внешней силой.
Ежедневно в мире производится более 20 млн. В статье обсуждаются особенности построения эффективных систем управления электродвигателями с использованием FPGA, возможности применения FPGA в промышленных сетях и вопросы выбора оптимальной системы управления электроприводом. В настоящее время вопросы повышения энергоэффективности электроприводов выходят на первый план в промышленных приложениях. В статье рассмотрены такие методы улучшения КПД электродвигателя как применение оптимальных алгоритмов управления и контроль коэффициента мощности ККМ.
Как подбирать драйвер к шаговому двигателю
Содержание
- Digitrode
- цифровая электроника вычислительная техника встраиваемые системы
- Драйвер шагового двигателя: принцип работы, особенности, как выбрать драйвер
- Как управлять шаговым двигателем
- Универсальные микросхемы для управления шаговым двигателем
- Полнофункциональные драйверы шаговых двигателей
- Микрошаги
- Заключение
- Как подобрать нужный драйвер для управления шаговым двигателем?
- самодельный станок чпу
- Сайт поможет вам в изготовлении своего станка чпу
- Рекомендации по работе с драйверами шаговых двигателей
- Типы шаговых двигателей
- Особенности шаговых двигателей
- Система управления шаговым двигателем
- Драйверы шаговых двигателей
- Особенности и функции драйверов шаговых двигателей
- Дополнительные функции контроллеров шаговых двигателей
- ПОЛЕЗНО Шаговые двигатели, характеристики.
 Драйверы шаговых двигателей, разновидности, настройка.
Драйверы шаговых двигателей, разновидности, настройка. - Alsan
- Alsan
- Видео
 Драйверы шаговых двигателей, разновидности, настройка.
Драйверы шаговых двигателей, разновидности, настройка.Digitrode
цифровая электроника вычислительная техника встраиваемые системы
Драйвер шагового двигателя: принцип работы, особенности, как выбрать драйвер
Как управлять шаговым двигателем
Стандартный шаговый двигатель с постоянными магнитами имеет две обмотки. Если в системе используется биполярный драйвер, вращение достигается путем подачи определенной последовательности сигналов прямого и обратного тока через две обмотки. Таким образом, для биполярного шагового двигателя требуется H-мост для каждой обмотки. В униполярном приводе используются четыре отдельных драйвера, и они не должны иметь возможность подавать ток в обоих направлениях: центр обмотки представляется как отдельное соединение двигателя, а каждый драйвер обеспечивает ток, протекающий от центра обмотки к концу обмотки. Ток, связанный с каждым драйвером, всегда течет в одном и том же направлении.
На рисунке выше представлен биполярный шаговый двигатель (слева) и униполярный (справа). Направление протекания тока в однополярной системе указывает на то, что центр каждой обмотки подключен к напряжению питания двигателя.
Универсальные микросхемы для управления шаговым двигателем
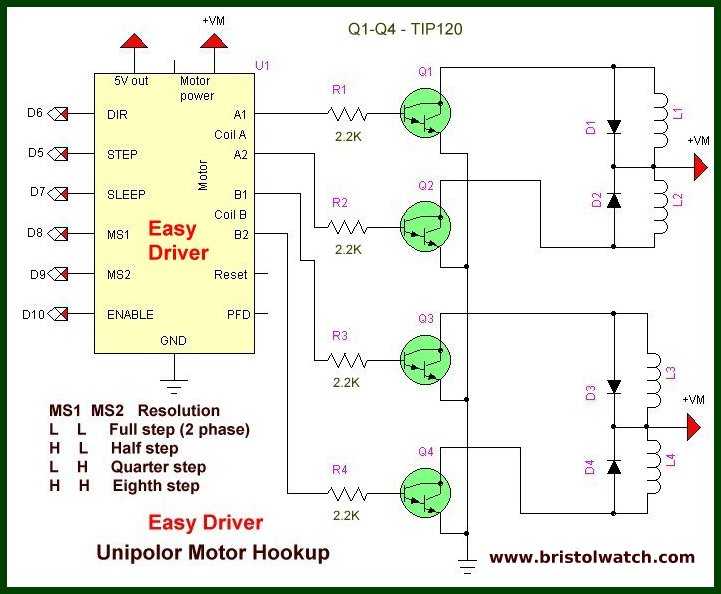
Первое, что нужно иметь в виду – это то, что микросхемы, предназначенные для основных функций управления двигателем могут использоваться с шаговыми двигателями. Вам не нужна микросхема, которая специально помечена или продается как устройство управления шаговым двигателем. Если вы используете биполярный привод, вам нужно два H-моста на шаговый двигатель; Если вы используете однополярный подход, вам нужно четыре драйвера для одного двигателя, но каждый драйвер может быть одним транзистором, потому что все, что вы делаете, это включаете и выключаете ток, а не меняете его направление.
Примером компонента в категории «универсальная микросхема» является DRV8803 от Texas Instruments. Это устройство описано как «драйверное решение для любого приложения переключения нижнего плеча».
Это устройство описано как «драйверное решение для любого приложения переключения нижнего плеча».
В таком устройстве центр обмоток шагового двигателя подключен к напряжению питания, а к обмоткам подается питание путем включения транзисторов нижнего плеча, чтобы они позволяли току течь от источника питания через половину обмотки, далее через транзистор и на землю.
Подход с использованием универсальной микросхемы удобен, если у вас уже есть опыт работы с подходящим драйвером – вы можете сэкономить несколько долларов, повторно использовав старый компонент, или сэкономить время (и уменьшить вероятность ошибок проектирования), включив известную и проверенную микросхему в вашу цепь управления шаговым двигателем. Но более сложная микросхема может обеспечить расширенную функциональность и упростить задачу проектирования, поэтому предпочтительнее взять шаговый драйвер с дополнительными функциями.
Полнофункциональные драйверы шаговых двигателей
Высокоинтегрированные контроллеры шагового двигателя могут значительно сократить объем проектных работ, связанных с применением более мощных шаговых двигателей. Первая полезная особенность, которая приходит на ум – это автоматическая генерация управляющей последовательности, т.е. способность преобразовывать прямые входные сигналы управления двигателем в требуемые последовательности сигналов. Давайте рассмотрим L6208 от STMicroelectronics, в качестве примера.
Первая полезная особенность, которая приходит на ум – это автоматическая генерация управляющей последовательности, т.е. способность преобразовывать прямые входные сигналы управления двигателем в требуемые последовательности сигналов. Давайте рассмотрим L6208 от STMicroelectronics, в качестве примера.
Вместо логических входов, которые напрямую контролируют ток, подаваемый на обмотки двигателя, L6208 имеет:
Этот интерфейс гораздо более интуитивно понятен, чем фактические последовательности включения и выключения, которые применяются к транзисторам, подключенным к обмоткам (пример которых приведен ниже).
Это последовательность для управления биполярным шаговым двигателем. «A» и «B» относятся к двум обмоткам, а столбцы «Q» указывают состояние транзисторов, управляющих током обмотки.
Микрошаги
Как следует из названия, функция микрошага заставляет шаговый двигатель выполнять вращение, которое значительно меньше одного шага. Это может быть 1/4 шага или 1/256 шага или где-то посередине.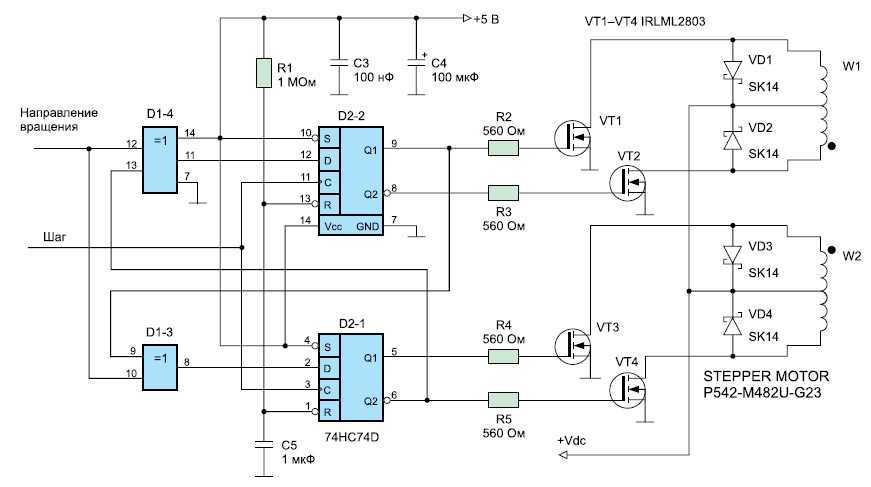 Микрошаг гарантирует точное позиционирование двигателя и обеспечивает более плавное вращение. В некоторых приложениях микрошаг совершенно не нужен. Однако, если ваша система может извлечь выгоду из чрезвычайно точного позиционирования, более плавного вращения или уменьшения механического шума, вам следует рассмотреть возможность использования микросхемы драйвера с возможностью организации микрошагов.
Микрошаг гарантирует точное позиционирование двигателя и обеспечивает более плавное вращение. В некоторых приложениях микрошаг совершенно не нужен. Однако, если ваша система может извлечь выгоду из чрезвычайно точного позиционирования, более плавного вращения или уменьшения механического шума, вам следует рассмотреть возможность использования микросхемы драйвера с возможностью организации микрошагов.
TMC2202 от Trinamic является примером микрошагового контроллера шагового двигателя.
Размер шага может быть всего лишь 1/32 от полного шага, также здесь есть некоторая функциональность интерполяции, которая обеспечивает «полную плавность 256 микрошагов». Эта микросхема также дает вам представление о том, насколько сложным может быть шаговый драйвер – он имеет интерфейс UART для управления и диагностики, специализированный алгоритм драйвера, который улучшает работу в режиме ожидания и низкоскоростную работу, а также различные другие вещи, о которых вы можете прочитать в 81-страничной документации на TMC2202.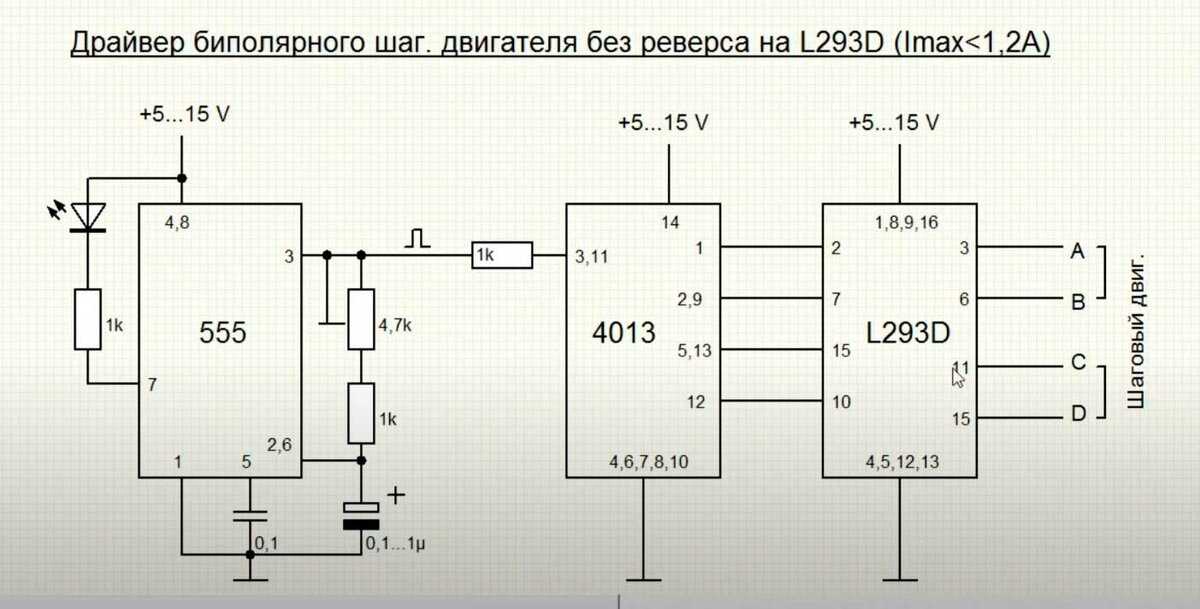
Заключение
Если у вас есть микроконтроллер для генерации последовательностей для управления шаговым двигателем и достаточно времени и мотивации для написания надежного кода, вы можете управлять шаговым двигателем с помощью дискретных полевых транзисторов. Тем не менее, почти во всех ситуациях предпочтительнее использовать какую-либо микросхему, и, поскольку на выбор имеется так много устройств и функций, у вас не должно возникнуть особых проблем с поиском компонента, подходящего для вашего приложения.
Источник
Как подобрать нужный драйвер для управления шаговым двигателем?
Для того, чтобы подобрать замену вышедшему из строю драйверу шагового двигателя, необходимо учесть несколько параметров:
1. Двигатели бывают с 2-х фазным питанием и 3-х фазным.
У 2-х фазных двигателей обычно 2,4,6 или 8 проводов. Для них соответственно необходимы драйверы с выходом питания на 2 фазы. На драйвере клемма, которая отвечает за питание двигателя, обычно подписана: A+, A-, B+, B-.
___________________
Драйвер Leadshine DM442 для двухфазных двигателей _____________________ Двухфазный двигатель Moons 34HD4404-02
У 3-х фазных двигателей обычно 3 или 6 проводов. На драйвере клемма, которая отвечает за питание двигателя, подписана: U, V, W.
________________
Драйвер Leadshine 3ND583 для трёхфазных двигателей _________________ Трёхфазный двигатель Leadshine 573S-09
2. Драйвера тоже должны получать питание для работы.
Обычно им необходимо питание не “жёстко установленное” (например, 48 вольт), а в диапазоне, например, от 20 до 50 вольт (как на примере выше, драйвер 3ND583). Идеально, если диапазон питания старого драйвера и нового пересекаются. В другом случае, необходимо проверить блоки питания оборудования на предмет того, есть ли у них такие выходы питания, чтобы подходили под диапазон питания драйвера.
Например, в лазерном станке стоит материнская плата Ruida RDLC-320a, которая питается от 24 вольт. Значит где-то в оборудовании размещен блок питания, который раздает питание 24 вольта. Значит драйвер можно так же запитать от блока питания, который даёт питание материнской плате.
Значит где-то в оборудовании размещен блок питания, который раздает питание 24 вольта. Значит драйвер можно так же запитать от блока питания, который даёт питание материнской плате.
Если у вас в станке стоит материнская плата Ruida RDLC-320a, то вы без сомнения сможете запитать драйвер Moons SR4H
3. Каждому двигателю необходима своя сила тока (А – амперы) для нормальной работы.
Если поставить силу тока меньшую необходимой, то двигатель в какие-то моменты вообще не будет крутиться, так как ему передаётся малое “усилие”. Наоборот, если поставить слишком высокую силу тока, то двигатель будет перегреваться и может совсем выйти из строя.
Подобрать необходимую силу тока можно из характеристики двигателя. Либо взять драйвер, который ранее работал в сопряжении с данным двигателем, и посмотреть, на какую силу тока он был настроен (для этого на драйвере есть pin-переключатели и соответствующая таблица).
__________________
К двигателю 57HS09 с током фазы 3А подойдёт драйвер Leadshine DM442, у которого можно настроить выдаваемую силу тока от 2,36 до 3,31А
4. Драйвер передает некоторое кол-во импульсов (сигналов) на двигатель для того, чтобы вал двигателя сделал один оборот на 360 градусов. Он может передавать 2 импульса, чтобы двигатель делал один оборот. Или 10 000 импульсов, и двигатель так же будет делать один оборот.
Драйвер передает некоторое кол-во импульсов (сигналов) на двигатель для того, чтобы вал двигателя сделал один оборот на 360 градусов. Он может передавать 2 импульса, чтобы двигатель делал один оборот. Или 10 000 импульсов, и двигатель так же будет делать один оборот.
Кол-во импульсов на один оборот так же настраивается на драйвере pin-переключателями соответственно таблице. Необязательно, чтобы данная характеристика сходилась на старом и на новом драйвере. Но желательно, чтобы значение, установленное на старом драйвере, делилось на одно из возможных значений на новом драйвере без остатка. Таким образом будет проще настроить передаточное число.
Например, на старом драйвере было значение 1000. На новом драйвере значение 200. Тогда передаточное число, которое надо будет подстроить в программе, будет больше в 5 раз. Без остатка.
Если же на старом драйвере было значение 1000, а на новом 300, то передаточное число будет в 3,33(3) раза выше. Это не точная цифра, и подстроить верное передаточное число будет сложнее.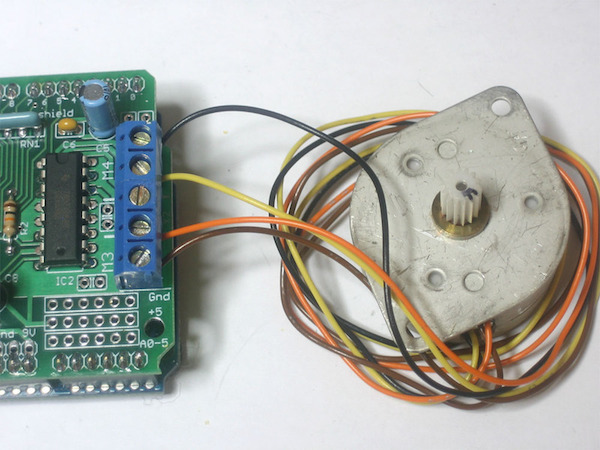
Идеальный вариант, когда на новом драйвере есть значение пульсов на 1 оборот такое же, как и установленное значение на старом драйвере.
Краткая инструкция как быстро подобрать драйвер аналогично тому, который недавно вышел из строя
1. Берем наш старый драйвер и смотрим на расположение pin-переключателей:
_________
3. Драйвер DM442 двухфазный, о чём говорят обозначения A+, A-, B+, B- на одной из колодок.
4. Необходимое питание для драйвера в диапазоне от 20 до 40 вольт, что говорит надпись в нижнем левом углу.
5. В поисках нужного драйвера я наткнулся на драйвер Moons SR4H, который наиболее вероятно подойдёт под замену вышедшему из строя Leadshine DM442.
____________
Источник
самодельный станок чпу
Сайт поможет вам в изготовлении своего станка чпу
Рекомендации по работе с драйверами шаговых двигателей
Вот основные положения, которые желательно соблюдать при работе с драйверами ШД:
1. Драйверы шаговых двигателей ни в коем случае нельзя подключать к источнику переменного тока. Безопасно запитать драйвер можно лишь с помощью выпрямленного постоянного напряжения.
Драйверы шаговых двигателей ни в коем случае нельзя подключать к источнику переменного тока. Безопасно запитать драйвер можно лишь с помощью выпрямленного постоянного напряжения.
2. При работе с шаговыми двигателями нужно внимательно соблюдать полярность подключения управляющих сигналов и силового питания. Несмотря на то, что современные контроллеры шаговых двигателей оснащены системой защиты от переполюсовки, лишняя осторожность в этом деле никогда не повредит.
3. Нельзя подключать драйвер шагового двигателя к серводвигателю или ШД к серводрайверу.
4. Обязательно нужно отключать питание перед тем, как осуществлять подключение драйвера или менять режим его работы.
5. Выключатель (размыкатель) питания можно устанавливать на линии драйвера только до блока питания, со стороны источника 220В. Установка размыкателя после БП строго запрещена.
6. Недопустимо соединять контакт «-» на источнике питания с массой, корпусом, заземлением итд.
7. Драйверы нельзя подключать последовательно по питанию, правильным считается только подключение типа «звезда» (то есть, к блоку питания подсоединяется отдельная линия для каждого драйвера).
8. Напряжение питания не должно превышать максимальные показатели, которые указаны в технических характеристиках конкретного драйвера.
9. Также нельзя подключать драйверы шагового двигателя ко включенному источнику питания или же отключать их от него. Сначала вы должны выполнить все соединения, а потом только включать питание (размыкатель обязательно должен быть установлен со стороны сети).
10. Допускается подключение лишь одного ШД к одного драйверу. Управление одного двигателя несколькими драйверами запрещено. Кроме того, нельзя подключать два драйвера к униполярному шаговому двигателю (даже в том случае, когда один драйвер коммутирует одну пару обмоток, а второй – другую).
11. Отдельное внимание желательно уделить системе охлаждения драйверов (отводу тепла), а также нужно тщательно следить за тем, чтобы контроллеры шаговых двигателей не контактировали с влагой.
12. Рекомендуется монтировать драйверы шаговых двигателей в защищенный электротехнический шкаф. Это позволит обеспечить надежность их работы и безопасность для людей, работающих с данным оборудованием.
Типы шаговых двигателей
Особенности шаговых двигателей
На сегодняшний день существует достаточно большое количество различных двигателей – систем управления механизмами. Одним из наиболее передовых и эффективных их видов по праву считаются шаговые двигатели. В данной статье мы рассмотрим основные особенности строения этой техники, а также расскажем вам о ее существующих разновидностях. Как известно, ШД представляет собой синхронный двигатель, в роторе которого расположены постоянные магниты, а основные направляющие (магнитное поле статора), вращается с помощью электроники.
В ходе своей работы, шаговый двигатель трансформирует управляющие импульсы (шаги) в механическое движение (вращение) ротора. ШД обладают целым рядом преимуществ, по сравнению с другими типами подобного оборудования. Сюда можно отнести их простую и понятную конструкцию, высокую надежность и долговечность, доступную цену, а также высокие показатели крутящего момента при низких скоростях. Однако данная техника также обладает и определенными недостатками – в частности, сюда относится эффект резонанса при низких скоростях и снижение крутящего момента на высоких. Впрочем, современные драйверы шаговых двигателей способны существенно снизить эффект от перечисленных недостатков.
ШД обладают целым рядом преимуществ, по сравнению с другими типами подобного оборудования. Сюда можно отнести их простую и понятную конструкцию, высокую надежность и долговечность, доступную цену, а также высокие показатели крутящего момента при низких скоростях. Однако данная техника также обладает и определенными недостатками – в частности, сюда относится эффект резонанса при низких скоростях и снижение крутящего момента на высоких. Впрочем, современные драйверы шаговых двигателей способны существенно снизить эффект от перечисленных недостатков.
Система управления шаговым двигателем
Indexer – контроллеры шаговых двигателей, представлены в виде микропроцессора, который генерирует импульсы «НАПРАВЛЕНИЕ» и «ШАГ», в соответствии с сигналами, которые он получает от пользователя. Помимо этого, контроллеры также выполняют и другие, более сложные функции. Силовой частью ШД является его драйвер – он преобразовывает сигналы от контроллера в силовые импульсы, которые необходимы для движения ротора. Современный рынок шаговых двигателей предлагает покупателям весьма большой выбор драйверов к ним. Для каждой модели драйвера характерны определенная величина тока и формы импульсов. Драйверы шаговых двигателей не являются универсальными, каждый из них совместим лишь с конкретной моделью ШД. Если вы собираетесь приобрести надежный и долговечный двигатель, то крайне важным решением будет подбор драйвера к нему.
Современный рынок шаговых двигателей предлагает покупателям весьма большой выбор драйверов к ним. Для каждой модели драйвера характерны определенная величина тока и формы импульсов. Драйверы шаговых двигателей не являются универсальными, каждый из них совместим лишь с конкретной моделью ШД. Если вы собираетесь приобрести надежный и долговечный двигатель, то крайне важным решением будет подбор драйвера к нему.
Современные шаговые двигатели делятся на 3 основные типа:
• Двигатели с переменным магнитным сопротивлением
• Двигатели с постоянными магнитами
• Гибридные двигатели
Каждый из этих разновидностей имеет особое строение и механизм работы. Например, постоянные магниты нельзя использовать в двигателях с переменным сопротивлением. В результате у таких моделей ШД отсутствует функция стопорного момента (detent torque). Из-за этого двигатели с переменным магнитным сопротивлением, в большинстве случаев, не могут достигнуть высоких показателей крутящего момента. Что же касается двигателей с постоянными магнитами, то их величина шага довольно велика – не менее 7.5°. Эта характеристики связана с особенностями конструкции ротора данных ШД. Кроме того, такие двигатели обладают достаточно низкой ценой, однако скорость их вращения оставляет желать лучшего.
Что же касается двигателей с постоянными магнитами, то их величина шага довольно велика – не менее 7.5°. Эта характеристики связана с особенностями конструкции ротора данных ШД. Кроме того, такие двигатели обладают достаточно низкой ценой, однако скорость их вращения оставляет желать лучшего.
Гибридные же шаговые двигатели обладают ротором с постоянными магнитами и многополюсным статором. Благодаря этому, такие модели ШД демонстрируют умеренную величину шага (около 1,8°) и достойные показатели крутящего момента (до 300 кгс/см). Стопорный момент у такого оборудования равняется примерно 10%, от показателей синхронизирующего статического момента.
Кроме того, шаговые двигатели отличаются друг от друга по способу питания. Здесь существуют:
• Униполярные двигатели
• Биполярные двигатели
Шаговый двигатель является униполярным в том случае, когда отводы от середины обмоток объединены между собой внутри самого двигателя. Таким образом, пользователю доступно только 5 выводов, что бывает крайне редко.
Таким образом, пользователю доступно только 5 выводов, что бывает крайне редко.
Драйверы шаговых двигателей
Особенности и функции драйверов шаговых двигателей
Драйвер (контроллер) шагового двигателя представляет собой устройство-набор микросхем, которое обеспечивает его правильную работу и заставляет двигатель четко выполнять сигналы управления. В сфере управления ШД существуют определенные стандарты – это сигналы STEP, DIR и ENABLE. Сигнал STEP отвечает за шаг двигателя, DIR – за направление вращения, а ENABLE является сигналом включения самого драйвера. Говоря научным языком, контроллеры шаговых двигателей – это силовые электронные устройства, управляющие высоковольтными/сильноточными обмотками шагового двигателя на основе цифровых сигналов управления. С их помощью двигатель выполняет свою непосредственную функцию – делает шаги (то есть, вращается).
Как известно, шаговые двигатели имеют более сложную структуру и систему управления, по сравнению с теми же обычными коллекторными двигателями.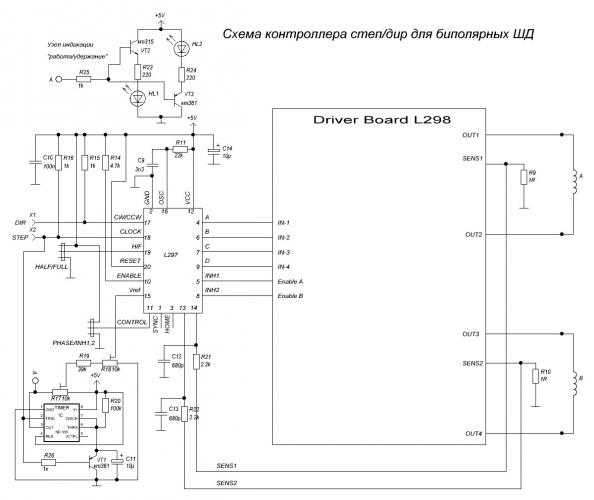 Чтобы эффективно управлять ими, нужно переключать уровень напряжения в обмотках в определенной последовательности и одновременно поддерживать контроль тока. Поэтому, чтобы упростить обслуживание данных механизмов, были внедрены вспомогательные устройства управления – драйверы шаговых двигателей. Они позволяют контролировать вращения ротора двигателя, в зависимости от сигналов управления и в после этого делить физический шаг шагового двигателя на мелкие дискреты с помощью электроники.
Чтобы эффективно управлять ими, нужно переключать уровень напряжения в обмотках в определенной последовательности и одновременно поддерживать контроль тока. Поэтому, чтобы упростить обслуживание данных механизмов, были внедрены вспомогательные устройства управления – драйверы шаговых двигателей. Они позволяют контролировать вращения ротора двигателя, в зависимости от сигналов управления и в после этого делить физический шаг шагового двигателя на мелкие дискреты с помощью электроники.
Для того, чтобы обеспечить полноценную работу устройства, к контроллерам шагового двигателя подключаются сигналы управления, сам ШД через обмотки, а также источник питания. Стандартные сигналы управления для такого оборудования – это сигналы STEP\DIR (или же CW\CCW), а также сигнал ENABLE.
Протокол STEP\DIR
Сигнал STEP – основной сигнал шага, тактирующий. Один его импульс поворачивает ротор двигателя на один шаг. Важно, что здесь имеется в виду не физический шаг шагового двигателя, а специальный шаг, параметры которого определяются драйвером (например, 1:1, 1:8, 1:16). Как правило, драйверы шаговых двигателей отрабатывают этот шаг по заднему или же переднему фронту импульса.
Как правило, драйверы шаговых двигателей отрабатывают этот шаг по заднему или же переднему фронту импульса.
Сигнал DIR – сигнал направления, потенциальный сигнал. В режиме логической единице шаговый двигатель вращается по часовой стрелке, а в режиме нуля – против нее. Также можно выставить значения этих параметров в обратной последовательности. Есть возможность инвертировать сигнал DIR из программы управления или же изменить последовательность подключения фаз двигателя с помощью драйвера (в разъеме его подключения).
Протокол CW/CWW
Сигнал CW – сигнал шага, тактирующий сигнал. Его импульс также поворачивает ротор. Один сигнал – один шаг ротора, коэффициенты которого устанавливаются драйвером (1:1, 1:16, 1:8 итд). Шаг отрабатывается драйвером по переднему или заднему фронту импульса.
Сигнал ENABLE – сигнал включения/выключения драйвера, потенциальный сигнал. При логической единице (5В на вход) драйвер выключается, и обмотки шагового двигателя обесточиваются. При нуле (0В на вход) драйвер включен и обмотки запитаны.
При нуле (0В на вход) драйвер включен и обмотки запитаны.
Дополнительные функции контроллеров шаговых двигателей
• Контроль перегрузок по току
• Контроль напряжения в питании, в том числе и защита от эффекта обратной ЭДС. Если вращение ротора замедляется, шаговый двигатель начинает вырабатывать дополнительное напряжение, которое суммируется с напряжением питания и на краткий период времени увеличивает его. Чем сильнее замедление, тем больше растет напряжение обратной ЭДС, и тем больше скачет напряжение питания. Такой скачок напряжения негативно влияет на драйвер и может даже вывести его из строя, поэтому драйверы шаговых двигателей оснащены системой защиты от колебаний питающего напряжения. Если показатели напряжения превышают пороговое значение, драйвер автоматически отключается.
• Контроль изменения полюсов (переполюсовки) при подключении питающего напряжения и сигналов управления.
• Режим экономии электрического тока, подаваемого на обмотки ШД при его простое (определяется отсутствием сигнала STEP).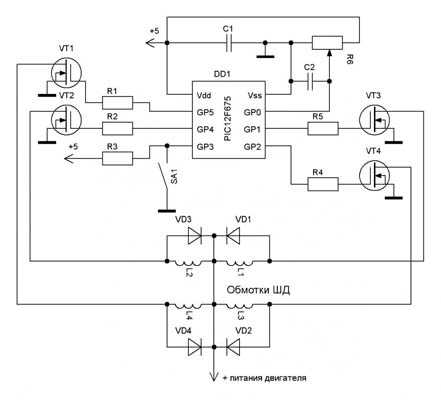 Он позволяет уменьшить нагрев двигателя и снизить расход потребляемого тока (в режиме AUTO-SLEEP).
Он позволяет уменьшить нагрев двигателя и снизить расход потребляемого тока (в режиме AUTO-SLEEP).
• Автоматическая система-компенсатор среднечастотного резонанса шагового двигателя. Резонанс часто возникает при работе ШД (в диапазоне 6-12 об/сек.) и негативно влияет на его работу. В частности, двигатель начинает гудеть, работать нестабильно и в итоге ротор останавливается. Это явление во многом зависит от механической нагрузки и параметров шагового двигателя. Автоматический компенсатор помогает полностью устранить явление резонанса, сделать вращение его ротора устойчивым и равномерным при любых диапазонах частот.
• Схема изменений формы фазовых токов с функцией увеличения их частоты. Также она называется морфинг – то есть, переход от микрошага к обычному шагу двигателя при увеличении частоты тока. Как известно, максимальный момент (заявленный в ТХ) отдается двигателем лишь при режиме полного шага. Поэтому, обычные драйверы шаговых двигателей (без морфинга) позволяют двигателям работать лишь на 70% от их максимальной мощности. Драйвер с функцией морфинга обеспечивает максимальную отдачу двигателя во всех частотных диапазонах.
Драйвер с функцией морфинга обеспечивает максимальную отдачу двигателя во всех частотных диапазонах.
• Генератор частоты STEP (встроенный) – это функция, позволяющая осуществить пробный запуск контроллера шагового двигателя без необходимости подключения к ПК или какому-либо другому внешнему генератору. Также с его помощью можно устанавливать простые системы перемещения опять таки без использования компьютера.
Источник
ПОЛЕЗНО Шаговые двигатели, характеристики. Драйверы шаговых двигателей, разновидности, настройка.
Alsan
Alsan
МЕСТНЫЙ СТАРОЖИЛА
На форуме периодически всплывают вопросы о драйверах шаговых двигателей и их настройке. Решил разобраться с этим делом для себя, возможно кому-нибудь также пригодится.
Для начала разновидности двигателей Nema17.
17HS4401 ток 1,7A – обычные
17HS8401 ток 1,8А – более мощные
17HS4402 ток 1,3A – по некоторым сведениям менее шумные, чем 17HS4401
(здесь важен ток двигателя, для дальнейших расчетов).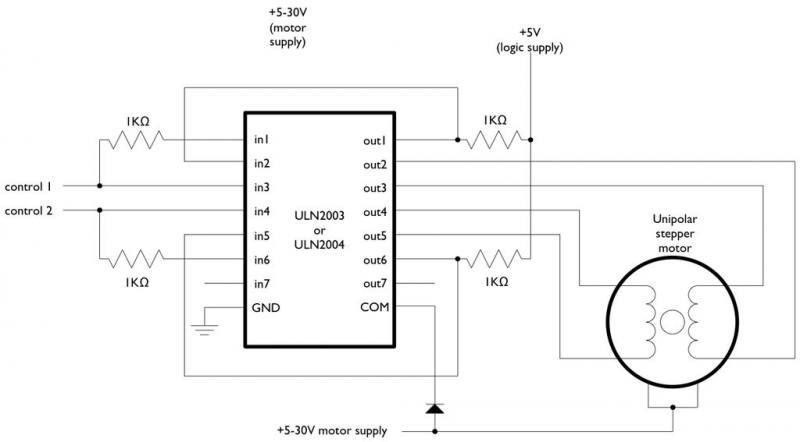
А4988
Встречаются варианты разного цвета.
Поэтому нужно обращать внимание не на цвет, а на микросхему драйвера.
Схема и распиновка:
Характеристики А4988
Напряжения питания логической части: 3-5,5 В
Напряжения питания силовой части: 8-35 В
Максимальный ток без дополнительного охлаждения: 1 А
Максимальный ток с дополнительным охлаждением: 2 А
Дробление шага: 1, 1/2, 1/4, 1/8, 1/16
Защита от перегрузок и перегрева
Значение микрошага устанавливается комбинацией сигналов на входах MS1, MS2, и MS3. Есть пять вариантов дробления шага.
MS1 MS1 MS1 Дробление шага
0 0 0 1
1 0 0 1/2
0 1 0 1/4
1 1 0 1/8
1 1 1 1/16
Настройка Vref для A4988
Vref = Imax * 8 * (Rs)
Imax — ток двигателя;
Rs — сопротивление резистора. В моем случае Rs = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Исходя из этого, при длительной работе, на практике можно использовать коэффициент 0,6
Получается для Для 17HS4401, с током 1,7А Vref = 1,7 * 8 * 0,100*0,6=0,816 (0,82)
Характеристики:
шаг:1, 1/2, 1/4, 1/8, 1/16, 1/32.
Регулировка тока на обмотках двигателя, переменным резистором опорного напряжения.
Источника питания для двигателей от 8,2 В до 45 В.
Встроенный регулятор напряжения для логических цепей. Возможность подключения к логике как 3,3 В, так и 5 В.
Защита от перегрева (отключение при нагреве драйвера 150 градусов).
Защита по превышению тока обмоток.
Защита по пониженному напряжению.
Защита от короткого замыкания на землю.
При токе до 1,5 А на обмотку способен работать без радиаторов и дополнительного охлаждения.
Регулировку тока двигателя следует производить выставив переменным резистором опорное наряжение (на выводах 12,13 микросхемы или на «среднем контакте резистора») из расчета 1 к 2, т.е 0,5В соответствует 1А, напряжению 1В соответствует 2А.
Обратите внимание, что переходное отверстие (золотистое) на плате, возле выводов 12,13 не является контактом для проверки опорного напряжения, это линия питания двигателей.
Режим микрошага устанавливается путем подачи «1» на контакты MODE0, MODE1, MODE2. (В случае установки драйвера на RAMPS это перемычки MS1, MS2, MS3)
M0 M1 M2 Режим микрошага
не стоит не стоит не стоит полный
стоит не стоит не стоит 1/2
не стоит стоит не стоит 1/4
стоит стоит не стоит 1/8
не стоит не стоит стоит 1/16
стоит не стоит стоит 1/32
не стоит стоит стоит 1/32
стоит стоит стоит 1/32
DRV8825 расчет Vref
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для шагового двигателя 17HS4401: Vref = 1,7 / 2 = 0,85В
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Детальное описание драйверов А4988 и DRV8825 в архиве А4988_DRV8825.rar
Источник
Видео
Как выбрать драйвер шагового двигателя
Сравнение драйверов шаговых двигателей. Что купить?
Обзор шаговых двигателей или как подобрать шаговый двигатель
Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
Обзор копеечной платы управления шаговым двигателем.
Как настроить драйвер шагового двигателя
✅ 47. Драйвер DM542 подключение
A4988 vs DRV8825 vs LV8727 Тест драйверов
Обзор драйверов для шагового двигателя.
Как микрошаг влияет на момент шагового двигателя?
MX1508 1,5A драйвер биполярного шагового двигателя SO-16
Электронные компоненты +7(960) 490-10-40
Избранное
0
Сравнение
0
Войти
Зарегистрироваться
КОРЗИНА
товаров: 0
сумма: 0 р.
- Аккумуляторы
- Аккумуляторы литиевые
- Аккумуляторы свинцово-кислотные Prometheus
- Аккумуляторы металл-гидридные
- Аккустические элементы
- Динамики
- Пьезоизлучатели, зуммеры
- Электромагнитные излучатели
- Ардуино и конструирование
- Адаптеры интерфейсов для ардуино
- Адаптеры питания
- Ардуино платформы
- Аудио усилители
- Датчики для ардуино и робототехники
- Динамики, зуммеры, пьезозвуковые излучатели
- Дисплеи, индикаторы, светодиодные матрицы
- Драйверы двигателей
- Корпуса
- Макетные панели беспаечные
- Модули расширения (shields)
- Модули релейные
- Наборы обучающие
- Наборы обучающие для пайки
- Насосы водяные
- Программаторы
- Прочие модули и устройства
- Радиомодули, Wi-fi, bluetooth, GSM
- Регуляторы, преобразователи напряжения, зарядки Li-ion АКБ
- Робототехника
- Сервоприводы
- Таймеры настраиваемые, программируемые
- Устройства ввода (клавиатуры, кнопки и др. )
- Шаговые двигатели
- Шлейфы, кабели, провода, соединители
- 3D печать
- Хранение модулей и деталей
- Электродвигатели
- Батарейки
- Блоки питания, адаптеры
- Адаптеры сетевые
- Лабораторные блоки питания
- Импульсные блоки питания
- Источники питания для поверхностного монтажа
- Трансформаторы силовые 220В
- Варисторы
- Вводы кабельные
- Вентиляторы
- Напряжение 5В DC
- Напряжение 12В DC
- Напряжение 24В DC
- Напряжение 220В AC
- Герконы
- Диоды
- Диоды
- Стабилитроны
- Диодные мосты и сборки
- Динисторы
- Зарядные устройства
- Измерительные приборы
- Мультиметры
- Измерители-регуляторы, индикаторы
- Индуктивности
- Дроссели
- Фильтры электромагнитных помех (EMI фильтры)
- Ферритовые кольца
- Инструмент
- Зажимы
- Инструмент
- Ионисторы
- Кабели, Провод, Шнуры
- Кварцевые резонаторы
- Клеммники на плату
- Клеммники акустические
- Клеммники-соединители проводов
- Кнопки, выключатели, переключатели, тумблеры и др.
- Кнопки тактовые
- DIP переключатели 2,54 мм
- DS-213 Серия
- DS-228 Серия
- KAN Серия (Кнопки триггеры)
- KCD Переключатели клавишные
- MPBS Серия, металлические
- PBS-11 Серия
- PBS-110 Серия
- PS-серия (6-пин)
- PS-2 Серия
- R13-507 Серия
- SK -Серия, Микропереключатели ползунковые
- SS-Серия, Микропереключатели ползунковые
- Переключатели многосекционные
- Тумблеры
- Комплектующие для компьютера
- Конденсаторы
- Конденсаторы электролитические
- Конденсаторы металлопленочные
- Конденсаторы подстроечные
- Конденсаторы керамические
- Конденсаторы корректирующие
- Конденсаторы подавления ЭМП
- Конденсаторы пусковые
- Конденсаторы SMD
- Концевые выключатели
- KW7 Серия
- KW10 Серия
- КW11 Серия
- ME Серия
- Корпуса для РЭА, Ардуино проектов и др.
- Корпуса для предохранителей
- Конвертеры постоянного напряжения
- Лампы накаливания
- E10 Патрон
- Лампы подсветки монитора (CCFL лампы)
- Магниты неодимовые
- Макетные платы
- Метизы, крепления, винты, гайки
- Метизы пластиковые
- Метизы металлические
- Микрофоны
- Микросхемы
- Аудиоусилители (УНЧ)
- Драйверы двигателей
- Драйверы ключей
- Драйверы питания
- Драйверы светодиодов и индикаторов
- Интерфейсы
- Источники опорного напряжения (ИОН)
- Компараторы
- Контроллеры заряда батарей
- Логика
- Микросхемы АВТО
- Микросхемы датчики и сенсоры
- Микросхемы для ПК, Ноутбук, Планшет
- Микросхемы телевизионные
- Микроконтроллеры
- Мультиконтроллеры
- Операционные усилители
- Отечественные микросхемы
- Память
- Прочие микросхемы
- Сборки транзисторов
- Стабилизаторы, регуляторы напряжения
- Таймеры
- ШИМ Контроллеры и коммутаторы напряжения
- PFC Контроллеры
- Оптопары и оптодрайверы
- Панельки для микросхем
- Пасики магнитофонов и тд.
- Паяльники
- Комплектующие паяльников
- Паяльные материалы и принадлежности
- Паяльные материалы
- Перемычки (джамперы)
- Предохранители
- 392 Серия, TE5, Предохранители
- 382 Серия, TE5, Предохранители
- АВТО, МОТО Предохранители
- КЕРАМИЧЕСКИЕ Предохранители
- СТЕКЛЯННЫЕ Предохранители
- САМОВОССТАНАВЛИВАЮЩИЕСЯ Предохранители
- Промышленная электроника
- Датчики промышленные
- Измерители-регуляторы, индикаторы
- Регуляторы переменного напряжения
- Радиаторы охлаждения
- Разное
- Диагностика автомобиля
- Лазерные указатели
- Разбор ТВ, мониторов и др. техники
- Сенсорные выключатели
- Щетки угольные и щеточные узлы
- Разъемы
- 2X-Серия Разъемы
- AC, DC Разъемы питания
- AC, DC Разъемы приборные
- AM-Серия Разъемы
- AMW-Серия Разъемы автомобильные
- ATX-Серия Разъемы ПК
- BNC Разъемы ТВ, Радио
- D-SUB Разъемы ПК
- DIN-Серия Разъемы аккустические
- Dupont-2. 54мм Разъемы
- GX-Серия Разъемы авиационные
- JTAG-Серия Разъемы приборные
- KF2510 Разъемы приборные
- RCA Разъемы
- SM2.54 Разъемы приборные
- TCP/IP Разъемы сетевые
- Mini USB Разъемы
- Micro USB Разъемы
- Type-C Разъемы
- USB Разъемы
- Xh3.54 Разъемы приборные
- Расходные материалы
- Клей
- Кабельные вводы
- Наконечники на провод
- Провод монтажный
- Прокладки изолирующие теплопроводные
- Текстолит
- Трубка термоусадочная (ТУТ)
- Трубка термостойкая
- Резисторы
- Резисторы постоянного сопротивления
- Резисторы переменные
- Резисторы подстроечные
- Фоторезисторы
- Реле
- Реле электромагнитные
- Светодиодная продукция
- Светодиодные ленты
- Адресные светодиоды
- Светодиоды DIP, 3 мм корпус
- Светодиоды DIP, 5 мм корпус
- Светодиоды DIP, 8мм
- Светодиоды DIP, 10 мм корпус
- Светодиоды SMD, ТВ Подсветка дисплея
- Светодиоды SMD, 0603
- Светодиоды SMD, 0805
- Светодиоды SMD, 1206
- Светодиоды SMD, 3014
- Светодиоды SMD, 3528
- Светодиоды SMD, 5630
- Светодиоды высокой мощности
- Светодиоды матричные
- Светодиодные индикаторы
- Инфракрасные диоды
- Текстолит
- Термисторы
- Термисторы силовые, защитные
- Термисторы NTC, Серии MF52
- Термисторы NTC, Серии MF58
- Термопредохранители
- Термопредохранители серии RH01, (250В 2A)
- Термопредохранители серии RY, (250В 10A)
- Термостаты
- KSD301-Серия
- Тиристоры, симисторы
- Товары для авто
- Транзисторы
- Транзисторы импортные
- Транзисторы отечественные
- Трансформаторы
- Трансформаторы силовые
- Трансформаторы силовые торроидальные
- Трансформаторы аудио
- Трансформаторы измерительные
- Фонари
- Шлейфы, ленточные кабели
- Электровакуумные лампы
- Электродвигатели
- Двигатели постоянного тока
- Двигатели переменного тока
- Шаговые двигатели
- Энкодеры
 )
)


 техники
техники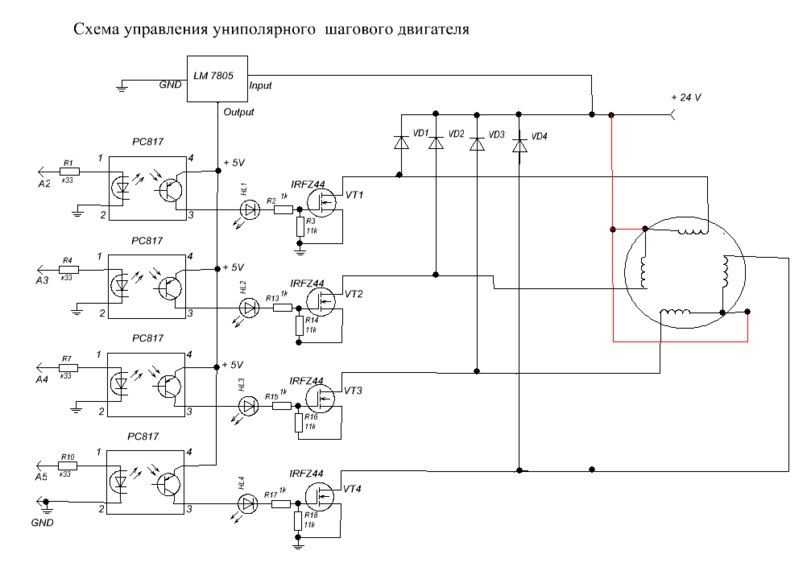 54мм Разъемы
54мм РазъемыОписание
MX1508 Драйвер биполярного шагового двигателя (4вх/4вых)
- Напряжение питяния: 3. ..10В
- Ток нагрузки: 1,5A max
- Кол-во каналов: 4. (использует 4 цифровых порта Ардуино платформы)
 ..10В
..10В Товары для
сравнения
сравнить
Просмотренные товары
новости
19 сентября 2022, 10:10
Поступление ШИМ контроллеров
17 августа 2022, 12:56
Поступление полевых транзисторов
27 июля 2022, 16:08
Поступление инструмента для ремонта
01 июля 2022, 14:34
Поступление новых модулей Ардуино
27 июня 2022, 16:16
СНИЖЕНИЕ ЦЕН!!!
все новости
Бренды
Все бренды
Что такое биполярные шаговые двигатели?
`;
Ларри Рэй Палмер
Биполярные шаговые двигатели представляют собой тип шагового двигателя переменного тока (AC), в котором используются электромагнитные катушки, активируемые по команде, для вращения вала. С помощью этой системы вал можно вращать размеренными движениями, а также реверсировать. В отличие от униполярных шаговых двигателей, биполярный двигатель позволяет потоку электрического тока двигаться в обоих направлениях, тем самым уменьшая количество катушек, необходимых для выполнения задачи.
Функция биполярных шаговых двигателей довольно проста.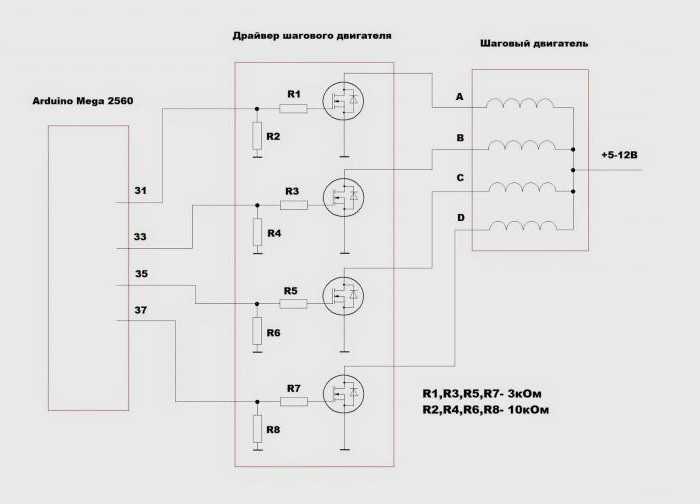 Драйвер шагового двигателя посылает импульс электрического тока через катушку двигателя. Катушка находится под напряжением, становясь электромагнитом. Это создает реакцию с валом двигателя, притягивая ротор к катушке. Затем драйвер подает питание на следующую катушку в серии, и процесс повторяется.
Драйвер шагового двигателя посылает импульс электрического тока через катушку двигателя. Катушка находится под напряжением, становясь электромагнитом. Это создает реакцию с валом двигателя, притягивая ротор к катушке. Затем драйвер подает питание на следующую катушку в серии, и процесс повторяется.
Одним из уникальных аспектов шаговых двигателей является то, что драйвер также может указать двигателю выполнять функции, отличные от простого вращения в одном направлении. Драйверы шаговых двигателей могут заставить биполярные шаговые двигатели работать вперед, назад или попеременно между двумя точками. В сочетании с контроллером шагового двигателя функцией драйвера можно управлять извне, что позволяет оператору также ускорять или замедлять движение вала.
В сочетании с контроллером шагового двигателя функцией драйвера можно управлять извне, что позволяет оператору также ускорять или замедлять движение вала.
В некоторых случаях используется специальный тип контроллера, называемый микрошаговым двигателем, в сочетании с биполярным шаговым двигателем и драйвером. Микрошаговый двигатель обеспечивает еще больший контроль, поскольку отдельные шаги двигателя далее делятся на микрошаги. Например, если бы у человека был восьмиступенчатый двигатель, а микрошаговый двигатель делал 100 микрошагов за шаг, вал двигателя можно было бы перемещать в 800 различных точках по ходу его вращения, а не только на восемь исходных шагов.
Униполярный шаговый двигатель менее эффективен, чем биполярный шаговый двигатель аналогичного размера, потому что биполярный двигатель выполняет ту же функцию, используя вдвое меньше катушек. Это достигается за счет включения специального привода биполярного шагового двигателя, который передает электричество по отдельным катушкам в двух направлениях. Эта двойная полярность позволяет мгновенно остановить или изменить направление вращения вала.
Шаговые двигатели
используются для различных приложений, в которых желательны управляемые движения. Например, они часто встречаются в промышленном сварочном оборудовании и оборудовании для точной резки. Этот тип оборудования особенно хорошо подходит для создания любительской робототехники, поскольку шаговый двигатель и драйвер значительно дешевле, чем сервоприводы.
Например, они часто встречаются в промышленном сварочном оборудовании и оборудовании для точной резки. Этот тип оборудования особенно хорошо подходит для создания любительской робототехники, поскольку шаговый двигатель и драйвер значительно дешевле, чем сервоприводы.
Преодоление вибрации вращения — драйвер двухфазного биполярного шагового двигателя серии CVD
Легко минимизировать вибрацию с помощью доступной передовой технологии
В идеале шаговые двигатели должны работать плавно, без вибрации во всех диапазонах скоростей. На самом деле они работают с некоторой вибрацией на низких, средних или высоких скоростях, вызывая нежелательный шум. Этот тип вибрации называется «вибрацией вращения», и разработка системы подавления вибрации вращения является серьезной проблемой. Чтобы преодолеть это, шаговый двигатель обычно разбивает на множество более мелких шагов. Однако при современных технологиях одного микрошага недостаточно. Не все драйверы или микросхемы шаговых двигателей одинаково справляются с вибрацией при вращении. В этом техническом документе объясняются преимущества технологии драйвера двухфазного биполярного шагового двигателя серии CVD.
На самом деле они работают с некоторой вибрацией на низких, средних или высоких скоростях, вызывая нежелательный шум. Этот тип вибрации называется «вибрацией вращения», и разработка системы подавления вибрации вращения является серьезной проблемой. Чтобы преодолеть это, шаговый двигатель обычно разбивает на множество более мелких шагов. Однако при современных технологиях одного микрошага недостаточно. Не все драйверы или микросхемы шаговых двигателей одинаково справляются с вибрацией при вращении. В этом техническом документе объясняются преимущества технологии драйвера двухфазного биполярного шагового двигателя серии CVD.
Улучшение контроля тока
Применение метода определения токов отдельных фаз с использованием новейшей микропроцессорной технологии с передовыми алгоритмами
Управление двигателем означает управление током, протекающим через обмотки двигателя. Если ток, протекающий через обмотки двигателя, можно контролировать, двигатель будет работать более плавно. Для этого становится важным способ определения тока обмотки двигателя.
Для этого становится важным способ определения тока обмотки двигателя.
Исторически сложилось так, что одним из преимуществ технологии 5-фазного шагового двигателя является то, что в цепях используется метод обнаружения тока во всех фазах, который одновременно определяет токи всех 5 кабелей (проводов) двигателя, подключенных к двигателю. Поскольку для этого метода требовалась только одна схема обнаружения, схема была простой. Однако этот метод не может обнаружить обратный ток, который не проходит через схему обнаружения. Из-за этого управление током становится нестабильным, что приводит к дополнительным этапам разработки драйвера для контроля вибрации.
Драйвер CVD компании Oriental Motor использует метод определения тока отдельных фаз для улучшения управления током, который обнаруживает 5 различных токов отдельно или, в случае 2-фазного драйвера CVD, 4 различных контроля тока (см. рис. 1), используя новейшая микропроцессорная технология с запрограммированными усовершенствованными алгоритмами.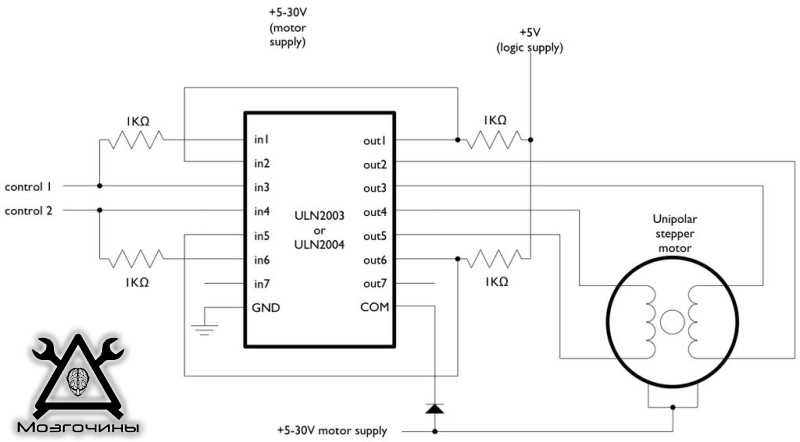
Максимальный крутящий момент с коррекцией тока
Максимальный выходной крутящий момент двигателя за счет использования характеристик электромагнитного тока двигателя
Выходной крутящий момент двигателя пропорционален току в диапазоне, где ток обмотки двигателя соответствует пропорциональному выходному крутящему моменту. По мере увеличения тока, т. е. к обмоткам подается ток, превышающий номинальный, из-за явления магнитного насыщения, вызванного реакцией якоря на магнитный поток, соотношение тока и крутящего момента постепенно отклоняется от пропорционального соотношения (см. рис. 2). Чтобы увеличить выходной крутящий момент двигателя, необходимо эффективно использовать диапазон, в котором происходит отклонение пропорционального соотношения.
Advanced Microstepping
Smooth Drive, использующий новейший микропроцессор, позволяет использовать микрошаги во всех диапазонах скоростей
Поскольку шаговые двигатели работают и останавливаются при каждом угле шага, они способны к высокоточному управлению положением. Однако, поскольку скорость вращения ротора изменяется при вращении на каждом основном шаге, это может стать причиной вибрации или шума. Для подавления этого типа вибрации был реализован микрошаг. Микрошаговая технология — это технология, которая делит базовый угол шага двигателя путем управления током, протекающим через обмотку двигателя. За счет уменьшения угла шага сводится к минимуму изменение скорости при движении на один шаг вперед, что позволяет добиться низкой вибрации.
Однако, поскольку скорость вращения ротора изменяется при вращении на каждом основном шаге, это может стать причиной вибрации или шума. Для подавления этого типа вибрации был реализован микрошаг. Микрошаговая технология — это технология, которая делит базовый угол шага двигателя путем управления током, протекающим через обмотку двигателя. За счет уменьшения угла шага сводится к минимуму изменение скорости при движении на один шаг вперед, что позволяет добиться низкой вибрации.
CVD, в дополнение к микрошагу, предлагает технологию Smooth Drive, самую передовую функцию микрошага, без необходимости увеличения количества импульсов, посылаемых драйверу. CVD с включенным Smooth Drive автоматически выполняет микрошаги до 2048 шагов (0,0008°) на полный шаг двигателя (1,8°). Большинство микрошаговых драйверов обеспечивают разрешение до 51 200 микрошагов на оборот (0,007°). При включенном Smooth Drive это значительно улучшает общую производительность во всех диапазонах скоростей, а не только в более низком диапазоне скоростей (рис.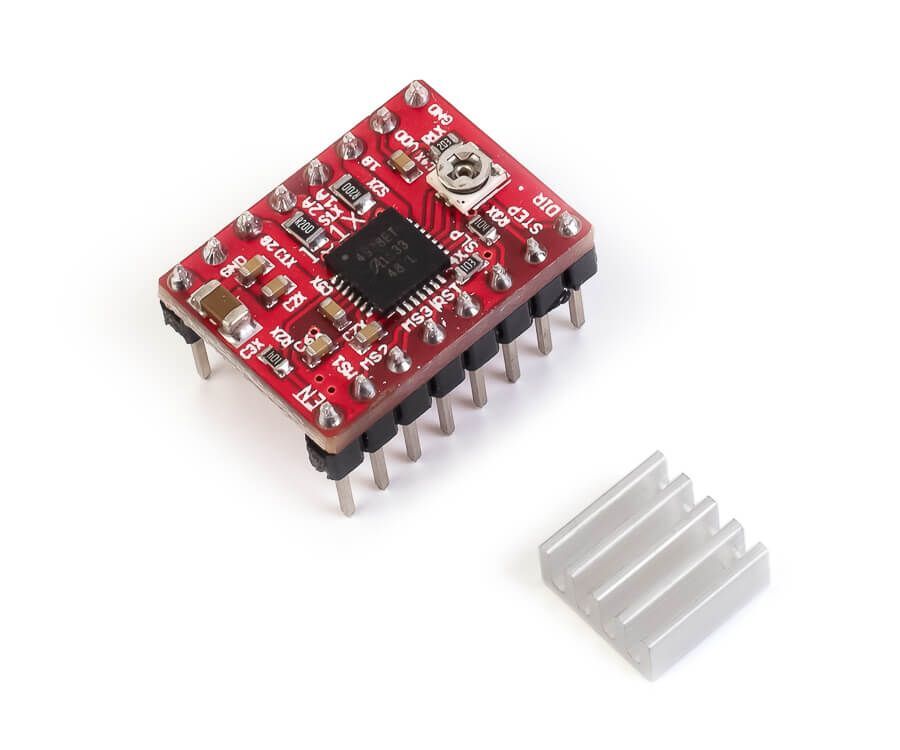 3), резко снижая вибрацию, которая может вызывать ошибки шага. Это позволяет использовать более широкое расчетное окно скорости двигателя для результатов производительности.
3), резко снижая вибрацию, которая может вызывать ошибки шага. Это позволяет использовать более широкое расчетное окно скорости двигателя для результатов производительности.
Минимизация пульсаций крутящего момента
Коррекция синусоидального тока, подаваемого на двигатель
Колебание выходного крутящего момента при смене фаз возбуждения называется пульсацией крутящего момента. Теоретически пульсации крутящего момента не возникают из-за изменения крутящего момента, возникающего в каждой фазе, на синусоидальную волну. Если зависимость тока двигателя и генерируемого крутящего момента находится в линейной форме, пульсации крутящего момента не возникнут из-за изменения тока в каждой фазе на синусоидальную волну. Однако зависимость тока двигателя и генерируемого крутящего момента НЕ имеет линейной формы. Поэтому при изменении тока в каждой фазе на синусоидальную волну происходит искажение момента там, где значение тока велико, что вызывает вибрацию. Короче говоря, работа с высоким выходным крутящим моментом и низкой вибрацией требует дополнительного механизма управления.
Короче говоря, работа с высоким выходным крутящим моментом и низкой вибрацией требует дополнительного механизма управления.
Для решения этой проблемы драйвер CVD соответствующим образом корректирует фазу синусоидального тока, подаваемого на двигатель. Это создало эффект коррекции искажения амперметрических характеристик, позволяя одновременно работать с низкой вибрацией и высоким выходным крутящим моментом. Кроме того, это повысило точность положения остановки.
На рис. 4 показано, насколько улучшаются характеристики вибрации при вращении с фазовой коррекцией. Пиковое значение вибрации значительно улучшается за счет активации фазовой коррекции.
Оптимальное значение фазовой коррекции изменяется в зависимости от магнитных свойств двигателя. По этой причине для каждого драйвера, объединенного с двигателем, устанавливается оптимальная величина коррекции.
После рассмотрения магнитных свойств двигателя осуществляется контроль тока, что обеспечивает высокую производительность. Это одна из сильных сторон Oriental Motor, где разрабатываются как двигатели, так и драйверы.
Это одна из сильных сторон Oriental Motor, где разрабатываются как двигатели, так и драйверы.
Версия для печати
Драйверы шаговых двигателей — Robot Gear Australia
Дом
Контроллеры двигателей
Шаговый двигатель
Драйверы шаговых двигателей позволяют управлять шаговыми двигателями с микроконтроллера. Драйвер двигателя подает высокие токи, необходимые для того, чтобы двигатель двигался с шагом в любом направлении. Входы от микроконтроллера сигнализируют, когда делается каждый шаг и в каком направлении.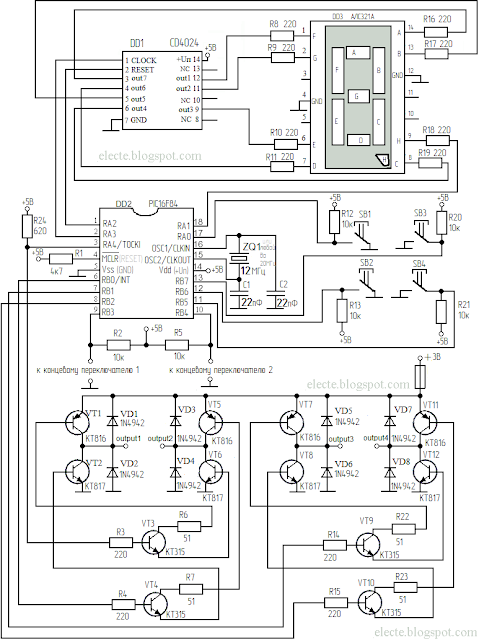
Поиск по категории
Прозрачный
Держатель драйвера шагового двигателя A4988
Код: MCU-60059
Плата драйвера шагового двигателя A4988 — это плата от Pololu для простого в использовании A49 от Allegro.Драйвер биполярного шагового двигателя на 88 микрошагов. Драйвер имеет регулируемое ограничение тока и пять различных разрешений микрошагов. Драйвер работает от сети 8 – 35 В и может…
Подробнее…
$
28,95
На складе в Австралии
У нашего поставщика нет в наличии
Держатель драйвера шагового двигателя A4988 (масса, штыри разъема припаяны)
Код: SKU-003468
Это упакованная версия нашего держателя драйвера шагового двигателя A4988, который поставляется с установленными вилочными контактами. Пожалуйста, посетите страницу этого продукта для получения дополнительной информации о драйвере.
Пожалуйста, посетите страницу этого продукта для получения дополнительной информации о драйвере.
Подробнее…
$
31,95
На складе в Австралии
У нашего поставщика нет в наличии
Держатель драйвера шагового двигателя A4988 (массовый, без контактов разъема)
Код: SKU-003462
Это упакованная версия нашего держателя драйвера шагового двигателя A4988, который поставляется без контактных штырей. Пожалуйста, посетите страницу этого продукта для получения дополнительной информации о драйвере.
Пожалуйста, посетите страницу этого продукта для получения дополнительной информации о драйвере.
Подробнее…
$
28,95
На складе в Австралии
У нашего поставщика нет в наличии
Держатель драйвера шагового двигателя A4988, Black Edition
Код: SKU-003056
Наш держатель драйвера шагового двигателя Black Edition A4988 является более производительной заменой оригинального A49. 88 носитель драйвера шагового двигателя.
88 носитель драйвера шагового двигателя.
Подробнее…
$
28,95
На складе в Австралии
Мы можем отправить еще 42 в течение 7-10 дней.
AMIS-30543 Носитель драйвера шагового двигателя
Код: SKU-003460
Это коммутационная плата для микрошагового биполярного драйвера шагового двигателя AMIS-30543 компании ON Semiconductor, который имеет регулируемое SPI ограничение тока, 11 ступенчатых режимов (от полного шага до 1/128 шага), обратную ЭДС обратную связь, которую можно использовать для обнаружение опрокидывания или дополнительное управление с обратной связью, а также.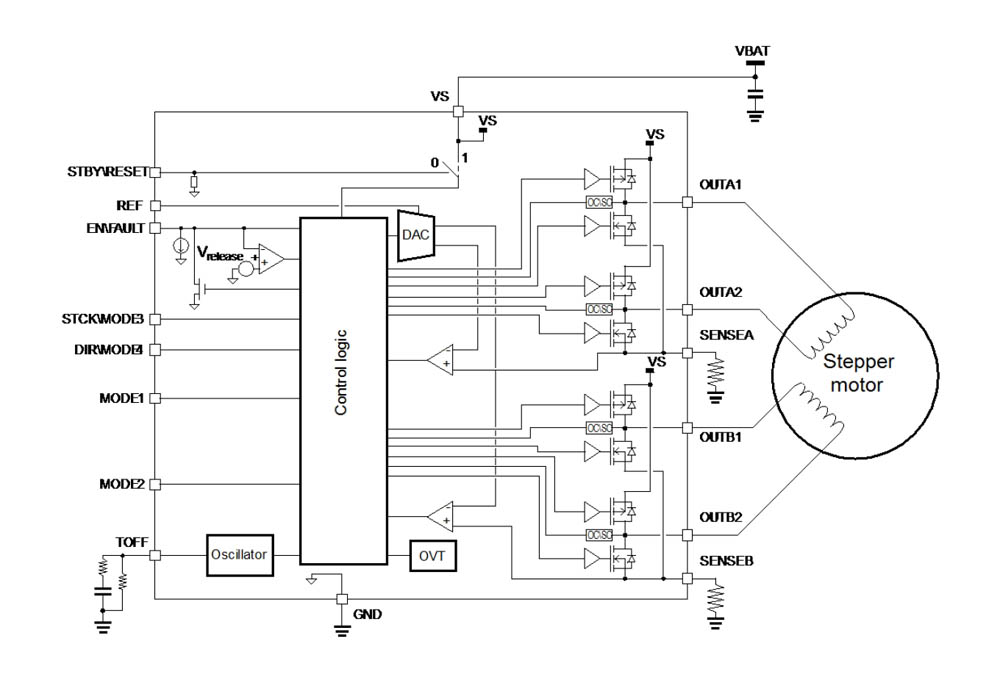 ..
..
Подробнее…
$
34,95
На складе в Австралии
Мы можем отправить еще 28 в течение 7-10 дней.
Драйвер шагового двигателя DRV8825 High Current V2
Код: MCU-60105
Плата драйвера шагового двигателя DRV8825 V2 представляет собой коммутационную плату для микрошагового биполярного драйвера шагового двигателя DRV8825 от TI. DRV8825 имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также шесть микрошагов разрешения (до 1/32 шага). Работает от 8,2 В — 45 В и…
Работает от 8,2 В — 45 В и…
Подробнее…
$
37,95
На складе в Австралии
Мы можем отправить еще 1 через 7-10 дней
DRV8825 Держатель драйвера шагового двигателя, сильноточный (объемный, выводы разъема припаяны)
Код: SKU-003470
Это упакованная версия нашего носителя драйвера шагового двигателя DRV8825, который поставляется с установленными контактными штырьками.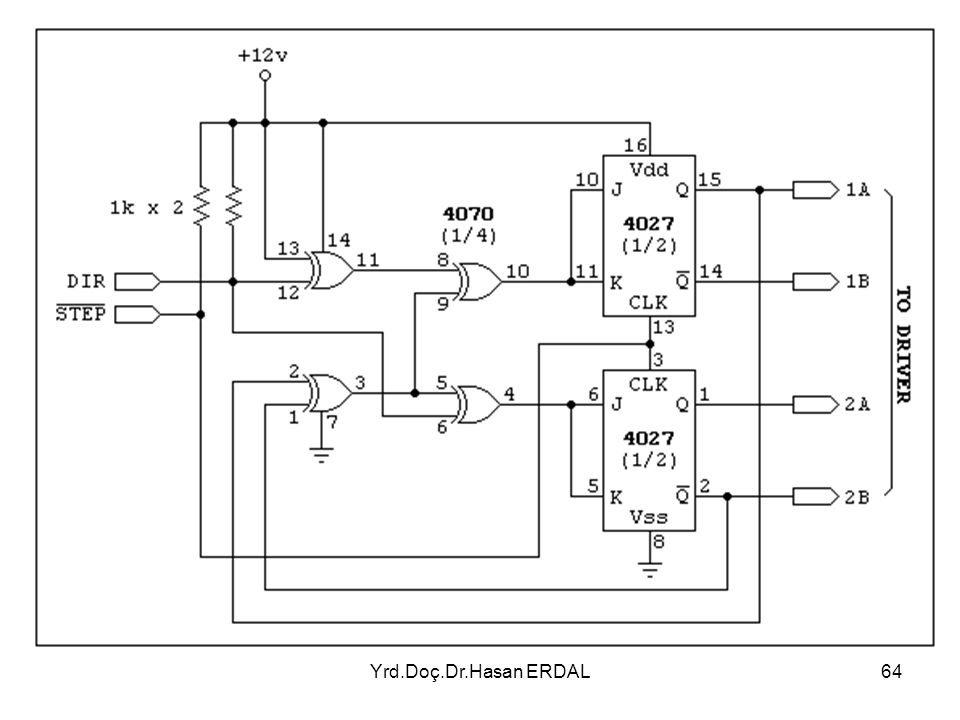 Пожалуйста, посетите страницу этого продукта для получения дополнительной информации о драйвере.
Пожалуйста, посетите страницу этого продукта для получения дополнительной информации о драйвере.
Подробнее…
$
40,95
На складе в Австралии
У нашего поставщика нет в наличии
DRV8825 Держатель драйвера шагового двигателя, сильноточный (контакты разъема припаяны)
Код: SKU-003467
Эта версия нашего шасси драйвера шагового двигателя DRV8825 поставляется с установленными штырьковыми контактами, поэтому для его использования с соответствующим 16-контактным разъемом или макетной платой без пайки не требуется пайка. Дополнительную информацию о драйвере см. на странице продукта DRV8825 с драйвером драйвера шагового двигателя.
Дополнительную информацию о драйвере см. на странице продукта DRV8825 с драйвером драйвера шагового двигателя.
Подробнее…
$
40,95
На складе в Австралии
У нашего поставщика нет в наличии
DRV8834 Драйвер драйвера шагового двигателя низкого напряжения
Код: MCU-60122
Плата драйвера шагового двигателя DRV8834 представляет собой коммутационную плату для микрошагового биполярного драйвера шагового двигателя DRV8834 от TI. DRV8834 имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также шесть микрошагов разрешения (до 1/32 шага). Работает от 2,5 В — 10,8 В и…
DRV8834 имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также шесть микрошагов разрешения (до 1/32 шага). Работает от 2,5 В — 10,8 В и…
Подробнее…
$
15,95
На складе в Австралии
Мы можем отправить еще 4 в течение 7-10 дней.
EasyDriver — Драйвер шагового двигателя
Код: SKU-001841
EasyDriver — это простой в использовании драйвер шагового двигателя, совместимый со всем, что может выдавать цифровой импульс от 0 до 5 В (или импульс от 0 до 3,3 В, если вы припаяете SJ2 на EasyDriver).