Содержание
Контроллер шагового двигателя схема | KAVMASTER
За какое-то время у меня скопилось много шаговых двигателей, но все не было времени ими заняться, а ведь шаговый двигатель вещь довольно интересная и полезная. Но у многих радиолюбителей возникают проблемы с запуском таких двигателей, вот я и решил собрать контроллер для проверки наиболее часто распространённых шаговых двигателей.
Блок управления шаговым двигателем
Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует очень много типов шаговых двигателей, но самыми простыми в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины (см. Рис.1). Их устанавливают в такие аппараты, как принтер, копир, дисковод и т.д.
Схема управления шаговым двигателем.

На рисунке 2 представлена схема управления шаговым двигателем.
Сперва хотел разработать схему на жесткой логике, но когда определился с функциями, которые она должна выполнять, пришло твердое решение использовать для этих целей микроконтроллер. И так, что можно определить с помощью данного блока управления.
- Можно определить количество шагов.
- Определить один из двух алгоритмов работы двигателя.
- Опробовать работу двигателя в полушаговом режиме.
- Можно опробовать работу в полношаговом режиме.
Еще раз повторюсь, что разновидностей шаговых двигателей много и данный контроллер подойдет не для всех.
Программы управления шаговыми двигателями
Программа управления состоит из пяти подпрограмм, которые переключаются кнопкой BS3 – «Выбор программ». Номер выбранной подпрограммы отображается тремя светодиодами в двоичной системе счисления. При первом включении должен загореться светодиод HL1, индицирующий о том, что включена первая подпрограмма работы шагового двигателя в полушаговом режиме. Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя.
Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя.
Возможно, придется экспериментировать. На скриншоте 1 (передняя панель виртуального осциллографа программы Proteus) можно наблюдать импульсную последовательность и коды полушагов работы двигателя. Некоторые из шаговиков по этому алгоритму у меня не работали.
Полношаговый алгоритм работы шагового двигателя
Подпрограмма №2 – светится второй светодиод. В этой подпрограмме двигатель будет работать по полно шаговому алгоритму, показанному на скрине 2.
Подпрограмма №3 – светятся первый и второй светодиоды. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3.
Количество шагов шагового двигателя
Подпрограмма №4 – светится третий светодиод. Данная подпрограмма обеспечивает один шаг двигателя при каждом нажатии на кнопку «Право». Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Подпрограмма №5 – светятся первый и третий светодиоды. В этой подпрограмме творится тоже самое, только алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 3.
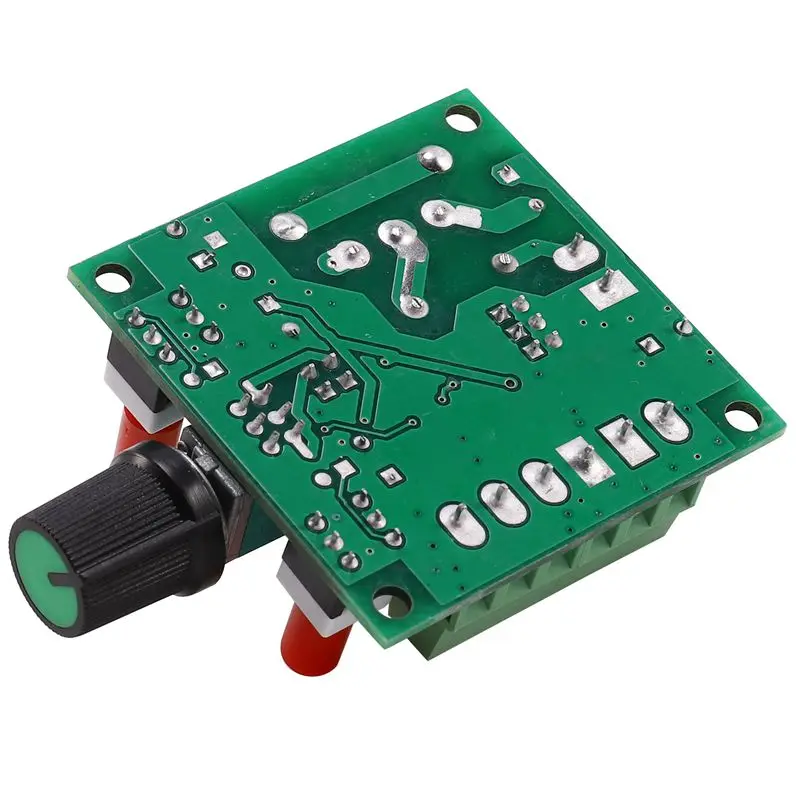
Общий вид платы — на фото.
Файл прошивки, схему и рисунок печатной платы можно скачать по ссылке ниже.
Скачать файлы
Скачано: 1029, размер: 23.1 KB, дата: 10.Ноя.2018
Купить USB программатор PIC K150 ICSP
1.4. Блок управления шаговым двигателем
Блок
управления линейным шаговым двигателем
БУЛШД обеспечивает питание и управление
двигателем. Блок выполнен в виде сварного
каркаса с направляющими, в которые
вставляются платы, представляющие собой
функционально законченные узлы
электрической схемы.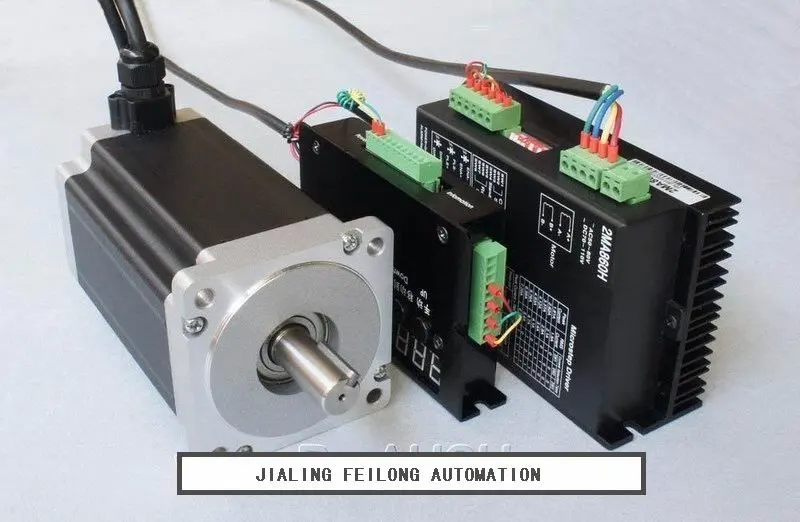 Для поддержания
Для поддержания
нормального температурного режима
работы электрической схемы в блок
встроены два вентилятора.
БУЛШД
получает импульсы перемещения, а также
может получать команды направления от
программного устройства, например от
системы управления IBM.
Цифроаналоговые решающие устройства
преобразует эти импульсы и команды в
ступенчатые синусоидальные и
косинусоидальные формы. Усилители
мощности принимают сигналы управления
с цифроаналоговых преобразователей,
усиливают по мощности и подают на катушки
индуктора. Обратная связь в усилителях
мощности обеспечивает в катушках
индуктора ток, пропорциональный входному
напряжению. Для каждой фазы индуктора
имеется усилитель мощности.В блоке
управления шаговым двигателем используются
2 платы ЦАП – для двух координат, 4 платы
усилителя мощности – управляющие
восьмью фазами шагового двигателя.
Прогр
обеспечение шд.
================================
Список
рекомендуемой литературы
1. Юров
Юров
В.Assembler
СПб.: Питер, 2001.
2.Сабинин
Ю.А. и др. Автономные дискретные
электроприводы с силовыми шаговыми
двигателями. Л.: Энергия. Ленингр. отд-ние,
1980.
3.Гук
М. Аппаратные интерфейсы ПК. Энциклопедия.
– СПб.: Питер, 2002.
4.Мартыничев
А.К. Системы программного управления
производственными установками и
технологическими комплексами: учеб.
пособие. Чебоксары: Изд-во Чуваш.
ун-та,1998.
5.Мартыничев
А.К. Новицкий В.А. Системы программного
управления производственными установками
и технологическими комплексами:
лабораторный практикум. Чебоксары:
Изд-во Чуваш. ун-та,2010. -380с.
5.Техническое
описание автомата сборки плат АСП –
902.
6.Шаговые
приводы в станках с ЧПУ: метод. указания
к лабораторным работам / сост. А.К.
Мартыничев. Чебоксары: Изд-во Чуваш.
ун-та, 1985. 24с.: ил.
7.Афонин
А.А., Билозор Р.Р. Электромагнитный привод
робототехнических систем. Киев, 1986.
Киев, 1986.
8.Гумен
В.Ф., Калининская Т.В. Следящий шаговый
электропривод. Л.: Энергия, 1980.
9.Фигурнов
В.Э. IBM
PC
для пользователя. Изд. 6-е, переработанное
и дополненное – М.: ИНФРА-М, 1996.
10.Комкин
В.Л. Аппаратные системы числового
программного управления. – М.:
Машиностроение, 1989.
11.Хрулев
А.К., Черепанов В.П. Диоды и их зарубежные
аналоги: Справочник. В трех томах. Том
1. – М.:ИП РадиоСофт, 1998.
12.Нефедов
А.В. Интегральные микросхемы и их
зарубежные аналоги. Т.1. – М.: КУбК-а,
1997.
13.Дьяконов
В. Simulink
4. Спец. справочник. – СПб.:Питер, 2002.
В.
Юров. Assembler:
практикум. – СПб.: Питер, 2001.
14.Герман-Галкин
С.Г. Компьютерное моделирование
полупроводниковых систем в MATLAB
6.0:Учебное пособие. – СПб.: КОРОНА принт,
2001.
15.Терехов
В.М. Системы управления электроприводов:
Учебник для студентов высших учебных
заведений.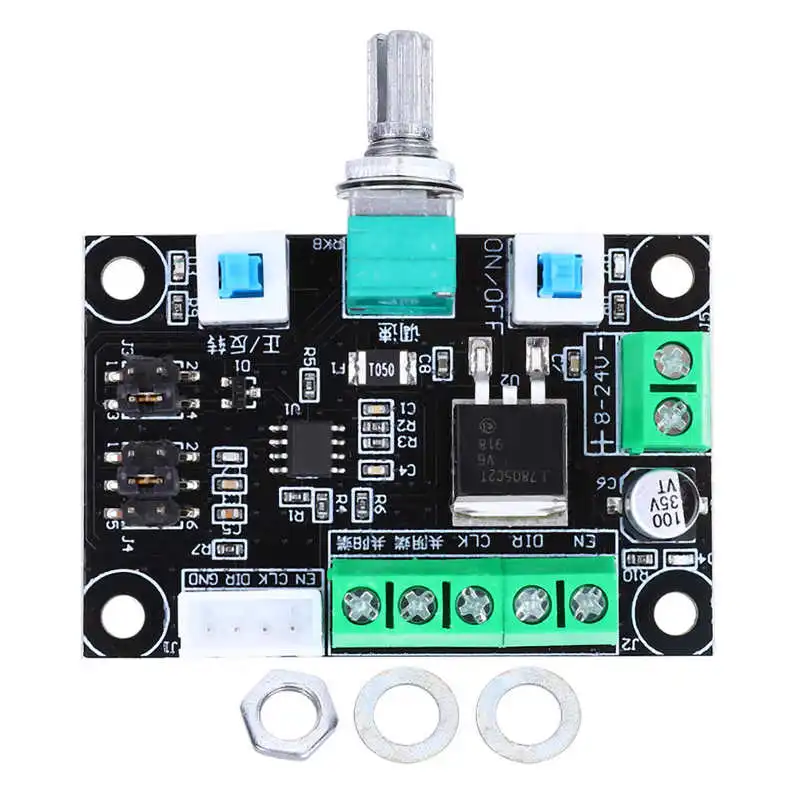 – М.: Издательский центр
– М.: Издательский центр
«Академия», 2005.
17.Джордейн
Р Справочник программиста персональных
компьютеров типа IBM
PC,
XT
и AT:
пер. с англ. М.: Финансы и статистика
1992. 544 с.:ил.
19.
Иванов Ю.В., Лакота Н.А. Гибкая автоматизация
производства РЭА с применением
микропроцессоров и роботов: учеб. пособие
для вузов. М.: Радио и связь, 1987.
БЛОК УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ SMCU3
Блок управления биполярным шаговым двигателем Microstep SMCU3 предназначен для управления малыми и средними станками с ЧПУ (для обработки дерева и сплавов легких металлов, гравировки, координатного сверления, газовой резки, гидроабразивной резки и т.д. ).
SMCU3 — блок управления для управления максимум 4 шаговыми двигателями. Блок управления содержит коммутационную плату IO4 со слотами для установки до 4-х микрошаговых приводов МСТ-107 и одну плату питания с моторным тормозом ПСБ-1.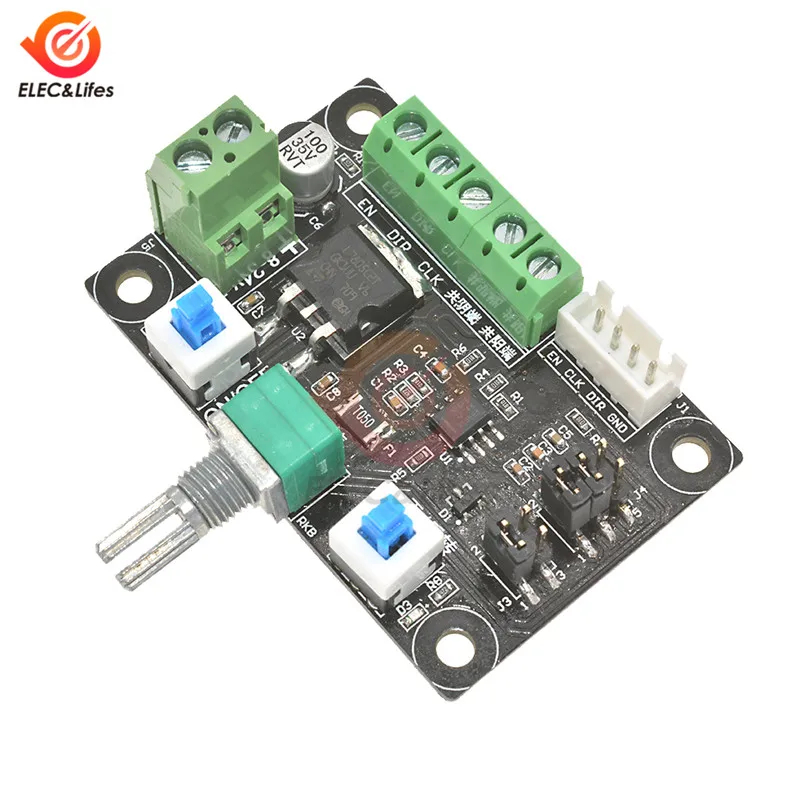
Передняя панель содержит четыре разъема для шагового двигателя, один разъем для 5 концевых выключателей и для аналогового выходного сигнала, а также разъем Centronics (IEEE1284), который используется для подключения блока управления SMCU3 к ПК с помощью стандартного кабеля принтера.
Управление шаговым двигателем осуществляется по трем линиям, STEP, DIR и ENA (enable). Это означает, что для многоосевого управления можно использовать уже разработанное популярное программное обеспечение, такое как: Mach3, Mach4, LinuxCNC (бесплатно), TurboCNC (бесплатно), KCam и подобные.
Для питания блока управления SMCU3 необходимо предусмотреть трансформатор номинальной мощностью 300-400 ВА с двумя вторичными выходами: 18-28В переменного тока / 10-14А и 12-18В переменного тока / 350мА. Дополнительные сведения о силовом трансформаторе можно найти в руководстве пользователя платы питания с моторным тормозом ПСБ-1.
SMCU3 Руководство пользователя
Фотогалерея
Посмотреть встроенную галерею изображений в Интернете по адресу:
https://www. audiohms.com/en/cnc-electronics-products/drives-and-control-units-for-stepper-motors/stepper-motor-control-unit-smcu3#sigProId5bb417504f
audiohms.com/en/cnc-electronics-products/drives-and-control-units-for-stepper-motors/stepper-motor-control-unit-smcu3#sigProId5bb417504f
ОПИСАНИЕ ВХОДА- ВЫХОДНЫЕ КОНТАКТЫ
| Описание — функция | Номер контакта на стороне ПК (разъем DB25) | Тип линии на стороне ПК | Аннотация |
| Ось Y ШАГ | 4 | Выход | — |
| Ось Y DIR | 5 | Выход | — |
| Ось Z ШАГ | 6 | Выход | — |
| Ось Z DIR | 7 | Выход | — |
| Ось А ШАГ | 8 | Выход | — |
| Ось A DIR | 9 | Выход | — |
| ENA (включение) | 17 | Выход | — |
| Сигнал безопасности (нагнетательный насос) | 14 | Выход | Выход Может быть включен и выключен по выбору |
| Шпиндель — Реле 1 | 1 | Выход | Опционально аналоговый выход 0–5 В или 0–10 В |
| Охлаждающая жидкость — Выпуск 2 | 16 | Выход | — |
| Концевой выключатель 1 (SW1) | 10 | Ввод | — |
| Концевой выключатель 2 (SW2) | 11 | Ввод | — |
| Концевой выключатель 3 (SW3) | 12 | Ввод | — |
| Концевой выключатель 4 (SW4) | 13 | Ввод | — |
| Аварийный останов — концевой выключатель 5 (SW5) | 15 | Ввод | — |
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
| Характеристики | Описание — Значение |
| Тип | Блок управления с микрошаговыми приводами для биполярного шагового двигателя |
| Частота ШИМ | 19 кГц |
| Номер оси | 1–4 |
| Шаговые двигатели тока | 7,5 А макс. (устанавливается с использованием одного внешнего резистора на ось) (устанавливается с использованием одного внешнего резистора на ось) |
| Соединение с ПК | Через параллельный (LPT) порт |
| Входы | 5 цифровых оптоизолированных входов для подключения концевых выключателей |
| Выходы | — 2 релейных выхода 220 В переменного тока / 5 А макс. |
| Размеры (ширина x глубина x высота) | — |
| Вес нетто | — |
ПРИМЕЧАНИЕ: Спецификации могут быть изменены без уведомления
Пололу. Моторный двигатель. Motor Driver 36v4, вид снизу с размерами.
Мощный драйвер шагового двигателя Pololu 36v4, вид сверху. |
|---|
Высокомощный драйвер шагового двигателя Pololu 36v4 сочетает в себе микросхему драйвера шагового двигателя DRV8711 от Texas Instruments с внешними МОП-транзисторами, что позволяет управлять большими биполярными шаговыми двигателями при рабочем напряжении от 8 В до 50 В.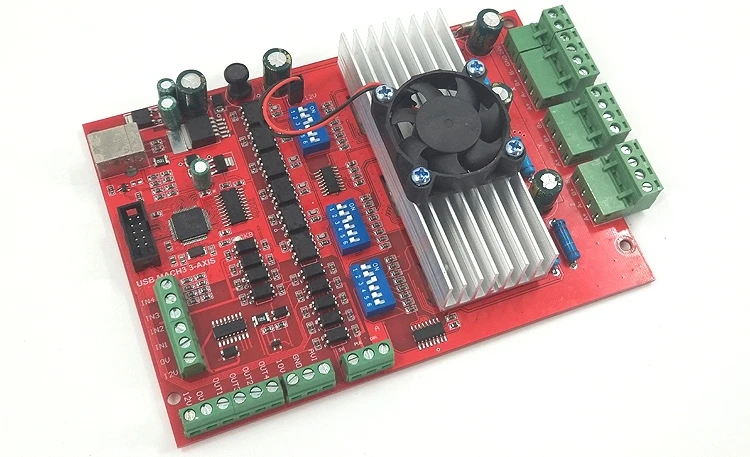 Драйвер DRV8711 имеет множество конфигурируемых настройки, поэтому см. техническое описание DRV8711 для подробного объяснения его функций и способов их использования (у нас также есть библиотека Arduino, которая упрощает начало работы, предоставляя основные функции для настройки и работы с драйвером).
Драйвер DRV8711 имеет множество конфигурируемых настройки, поэтому см. техническое описание DRV8711 для подробного объяснения его функций и способов их использования (у нас также есть библиотека Arduino, которая упрощает начало работы, предоставляя основные функции для настройки и работы с драйвером).
Мощность драйвера зависит от внешних двойных Н-мостов, которые позволяют драйверу подавать непрерывный ток до 4 А на фазу без какого-либо дополнительного охлаждения, такого как радиаторы или принудительный поток воздуха. (При достаточном дополнительном охлаждении драйвер может поддерживать ток примерно до 6 А на фазу; дополнительную информацию, включая важную информацию о безопасном использовании этого продукта, см. в разделе «Соображения по рассеиванию мощности» ниже.)
Основные характеристики
- Широкий диапазон рабочего напряжения от 8 В до 50 В
- Высокая мощность: может непрерывно обеспечивать до 4 А на фазу без дополнительного охлаждения (макс.
 6 А при достаточном дополнительном охлаждении)
6 А при достаточном дополнительном охлаждении) - Широкие возможности настройки через интерфейс SPI
- Дополнительные контакты управления STEP/DIR (степпингом также можно управлять только через интерфейс SPI)
- Девять различных шагов разрешения вплоть до 256 микрошагов: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага, 1/32 шага, 1/64 шага, 1/ 128 шагов и 1/256 шагов
- Регулируемое управление током позволяет установить максимальный выходной ток, что позволяет использовать напряжения выше номинального напряжения вашего шагового двигателя для достижения более высокой частоты шагов
- Адаптивное время гашения, регулируемое время затухания и различные режимы затухания тока позволяют создавать сверхплавные профили движения через интерфейс SPI
- Дополнительный выход STALL включает обнаружение остановки при микрошаге
- Дополнительный выход BEMF позволяет использовать более продвинутые алгоритмы управления и обнаружения останова на основе обратной ЭДС шагового двигателя
- Драйвер поддерживает альтернативный режим работы для управления двумя коллекторными двигателями постоянного тока с ШИМ-входами вместо одного биполярного шагового двигателя с входами STEP/DIR
- Входы, совместимые с логикой 1,8 В, 3,3 В и 5 В
- Все цифровые выходы имеют открытый сток с подтяжкой к внешнему напряжению IOREF для использования с системами, отличными от 5 В (IOREF можно подключить к соседнему контакту 5V OUT для использования с системами 5 В)
- Блокировка при пониженном напряжении, защита от перегрузки по току, защита от короткого замыкания и защита от обратного напряжения (до 40 В)
- Arduino и примеры эскизов, которые предоставляют основные функции для настройки и работы с драйвером
 6 А при достаточном дополнительном охлаждении)
6 А при достаточном дополнительном охлаждении)Доступны библиотека
.
В качестве альтернативы этому драйверу шагового двигателя, наш многоинтерфейсный USB-контроллер шагового двигателя большой мощности Tic 36v4 имеет аналогичные характеристики мощности и предлагает высокоуровневые интерфейсы (USB, последовательный TTL, I²C, аналоговое напряжение, квадратурный энкодер и RC). сервоимпульсы для хобби), которые облегчают использование в некоторых приложениях. Программное обеспечение для настройки Tic позволяет изменять многие параметры драйвера через USB, устраняя необходимость прямого использования SPI для настройки DRV8711.
Обновление от 19 сентября 2019 г.: Сейчас мы поставляем небольшую версию (md38b) с улучшенной устойчивостью к шумам и отказам при высоких входных напряжениях и высоких ограничениях по току.
Входящее в комплект оборудование
Этот продукт поставляется со всеми установленными компонентами для поверхностного монтажа, как показано на рисунке. Однако для сборки входящих в комплект деталей со сквозными отверстиями требуется пайка.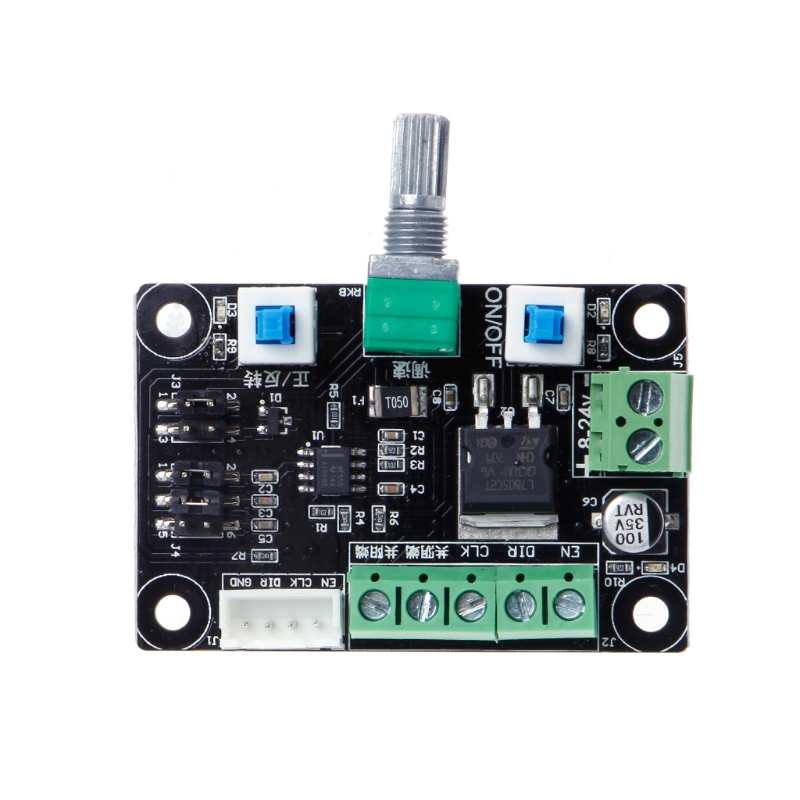 В комплект входят следующие детали со сквозными отверстиями:
В комплект входят следующие детали со сквозными отверстиями:
- Два 1×12-контактных отрывных разъема 0,1″ вилки
- Три 2-контактных клеммных блока 3,5 мм (для питания платы и выходов двигателя)
- Одна перемычка 0,1″ (для дополнительного подключения IOREF к соседнему контакту V5 при использовании этого драйвера в 5-вольтовых системах)
Вилки диаметром 0,1″ можно сломать или разрезать на более мелкие части по желанию и впаять в меньшие сквозные отверстия. Эти разъемы совместимы с макетными платами без пайки, 0,1-дюймовыми розетками и нашими премиальными и предварительно обжатыми перемычками. Клеммные колодки можно впаять в отверстия большего размера, чтобы обеспечить удобное временное подключение ненагруженных силовых проводов и проводов двигателя (см. наше короткое видео об установке клеммной колодки). Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате для наиболее компактной установки.
Использование драйвера
Распиновка
| PIN-код | Описание |
|---|---|
| ВИН | Подключение питания платы от 8 В до 50 В (защита от переполюсовки до 40 В). |
| ВМ | Этот контакт обеспечивает доступ к источнику питания двигателя после защиты от обратного напряжения MOSFET (см. схему платы внизу этой страницы). Его можно использовать для подачи защищенного от обратного тока питания на другие компоненты системы. Этот контакт также можно использовать с соседним контактом GND для добавления внешнего электролитического конденсатора в системах, где была бы полезна дополнительная шунтирующая емкость. |
| Земля | Точки заземления для источника питания двигателя и опорного заземления. Источник управления и драйвер двигателя должны иметь общую землю. |
| ВЫХ 1 | Выход двигателя: «положительный» конец катушки фазы А. |
| ВЫХОД2 | Выход двигателя: «отрицательный» конец катушки фазы А. |
| БУТ1 | Выход двигателя: «положительный» конец обмотки фазы B. |
| БУТ2 | Выход двигателя: «отрицательный» конец обмотки фазы B. |
| V5 (ВЫХОД) | Регулируемый выход 5 В: этот контакт обеспечивает доступ к напряжению от внутреннего регулятора DRV8711. Регулятор может обеспечить только до 10 мА, поэтому он в первую очередь полезен только для жесткого подключения входов платы к высокому уровню и подачи питания на выходы платы с открытым стоком. Он вообще не предназначен для питания внешних устройств. Примечание: этот выход 5 В отключен, когда устройство находится в спящем режиме. |
| ИОРЕФ | Все сигнальные выходы платы (кроме BEMF) представляют собой выходы с открытым стоком, которые подтягиваются к IOREF, поэтому на этот вывод следует подавать логическое напряжение системы управления (например, 3,3 В для использования в 3,3 В системах). Для удобства его можно подключить к соседнему контакту V5 (OUT), когда он используется в системе 5 В. |
| ШАГ/ВХОД1 | Изменения на этом входе перемещают ток двигателя на один шаг вверх или вниз в таблице транслятора (даже если двигатель отключен). Степпингом также можно управлять через интерфейс SPI, поэтому этот вывод является необязательным. В режиме внешнего ШИМ этот вывод работает как AIN1, а не как STEP, и напрямую управляет состоянием выхода AOUT1. Степпингом также можно управлять через интерфейс SPI, поэтому этот вывод является необязательным. В режиме внешнего ШИМ этот вывод работает как AIN1, а не как STEP, и напрямую управляет состоянием выхода AOUT1. |
| НАПРАВЛ./АИН2 | Вход, определяющий направление вращения шагового двигателя. Направление также можно контролировать через интерфейс SPI, поэтому этот вывод не является обязательным. В режиме внешнего ШИМ этот контакт работает как AIN2, а не как DIR, и напрямую управляет состоянием выхода AOUT2. |
| СДАТО | Вывод данных SPI. (Этот вывод также часто называют «MISO».) Этот вывод является выходом с открытым стоком и подтягивается к IOREF на плате. |
| СДАТИ | Ввод данных SPI. (Этот контакт также часто называют «MOSI».) |
| СКЛК | Вход синхронизации SPI. |
| СКС | Вход выбора чипа SPI. Логические переходы на этом выводе необходимы для связи SPI, даже если это единственное устройство на шине SPI.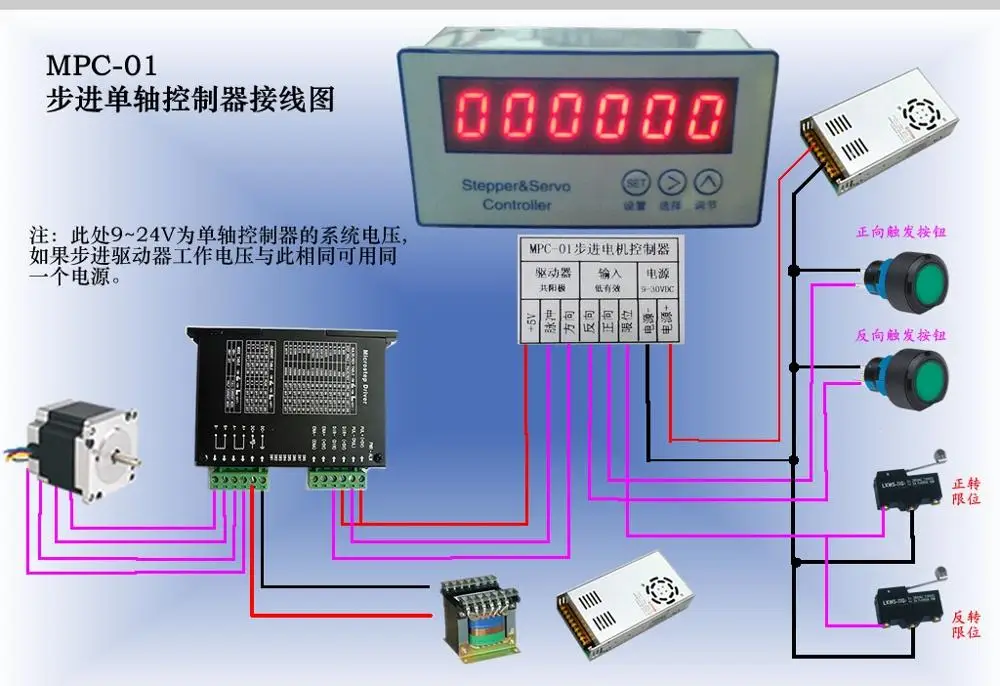 |
| СОН | По умолчанию драйвер устанавливает на этом контакте низкий уровень, что переводит его в спящий режим с низким энергопотреблением, когда схема драйвера двигателя и внутренний регулятор 5 В отключены, а все аналоговые схемы переводятся в состояние низкого энергопотребления. Цифровая схема по-прежнему работает в спящем режиме, поэтому к регистрам устройства можно получить доступ через последовательный интерфейс, пока IOREF подается извне. На этот контакт должен быть подан высокий уровень, чтобы включить устройство. |
| СБРОС | Вход сброса микросхемы. Высокий логический уровень на этом входе сбрасывает всю внутреннюю логику, включая индексатор и регистры устройства, и отключает выходы драйвера. Примечание: вывод RESET не работает, пока устройство находится в спящем режиме. |
| НЕИСПРАВНОСТЬ | Выход с открытым стоком, который переходит в низкий уровень при возникновении ошибки перегрузки по току, предварительного драйвера, перегрева или пониженного напряжения. Этот вывод подтягивается к IOREF, что по умолчанию делает его высоким. Этот вывод подтягивается к IOREF, что по умолчанию делает его высоким. |
| БИН1 | В режиме внешнего ШИМ BIN1 напрямую управляет состоянием выхода BOUT1. Этот вывод не используется в режиме индексатора (т.е. при использовании этого устройства в качестве драйвера шагового двигателя). |
| БИН2 | В режиме внешнего ШИМ BIN2 напрямую управляет состоянием выхода BOUT2. Этот вывод не используется в режиме индексатора (т.е. при использовании этого устройства в качестве драйвера шагового двигателя). |
| СТОЛ/БЭМФВ | Выход с открытым стоком, подтянутый к IOREF на плате. В режиме внутреннего обнаружения опрокидывания выход становится низким при обнаружении опрокидывания. В режиме обнаружения внешнего опрокидывания выход становится низким, когда доступно достоверное измерение противо-ЭДС. |
| БЭМФ | Аналоговый выход, представляющий противо-ЭДС двигателя. Сигнал на этом выводе может быть дополнительно обработан микроконтроллером для реализации более продвинутых алгоритмов управления и обнаружения останова. |
Для получения дополнительной информации об этих выводах см. техническое описание DRV8711.
При высоком входном напряжении (особенно выше 30 В) и высоких ограничениях по току интерфейс SPI драйвера с большей вероятностью будет подвержен влиянию электрических помех от драйвера и шагового двигателя, что может привести к ошибкам связи. Вы можете уменьшить эти помехи с помощью тщательной проводки и экранирования, а также снизить риск неожиданного поведения, приняв соответствующие меры предосторожности при обмене данными по SPI (например, прочитайте и проверьте настройки конфигурации после их записи и избегайте настройки драйвера, когда выходы двигателя отключены). включено).
В качестве альтернативы рассмотрите возможность использования нашего многоинтерфейсного USB-контроллера мощного шагового двигателя Tic 36v4, который обеспечивает интерфейсы высокого уровня для настройки и управления (что делает ненужной прямую связь SPI).
Общая типовая схема подключения
Типовая схема подключения микроконтроллера к драйверу шагового двигателя Pololu High-Power 36v4. |
|---|

Несмотря на то, что High-Power Stepper Motor Driver 36v4 позволяет управлять шаговым двигателем через простой интерфейс шага и направления, его необходимо сначала включить и настроить через интерфейс SPI после каждого включения питания. Это означает, что управляющий микроконтроллер должен быть способен действовать как мастер SPI (либо с периферийным SPI, либо с программным SPI), и он должен быть подключен к контактам SDATI, SCLK и SCS. Хотя выводы SDATO и FAULT не требуются для использования этого драйвера, обычно рекомендуется использовать их для отслеживания ошибок.
Типовая схема подключения (только для систем 5 В)
Типовая схема подключения микроконтроллера с логическим напряжением 5 В к драйверу шагового двигателя Pololu High-Power 36v4. |
|---|
Драйвер шагового двигателя высокой мощности 36v4 имеет внутренний стабилизатор 5 В, который можно использовать для питания IOREF в тех случаях, когда плата используется в системах 5 В. Мы предоставляем закорачивающий блок для подключения V5 к IOREF, или для более компактного соединения вы можете соединить перемычкой для поверхностного монтажа, расположенной рядом с этими контактами (выделено на рисунке ниже).
Мы предоставляем закорачивающий блок для подключения V5 к IOREF, или для более компактного соединения вы можете соединить перемычкой для поверхностного монтажа, расположенной рядом с этими контактами (выделено на рисунке ниже).
Обратите внимание, что подача IOREF от V5 не позволяет получить доступ к регистрам устройства через SPI, когда устройство находится в спящем режиме, поскольку выход регулятора V5 отключен, когда SLEEP находится на низком уровне.
Перемычка для поверхностного монтажа для контактов V5 и IOREF драйвера шагового двигателя высокой мощности Pololu 36v4. |
|---|
Библиотека Arduino и код примера
Мы написали библиотеку драйверов мощных шаговых двигателей для Arduino, которая предоставляет базовые функции для настройки и работы драйвера с помощью контроллера, совместимого с Arduino или Arduino. Библиотека включает в себя несколько примеров эскизов.
Соображения по рассеиваемой мощности
Высокомощный драйвер шагового двигателя 36v4 может обеспечивать непрерывный ток до 4 А на фазу в типичных условиях, но фактический ток, который он может обеспечить, будет зависеть от того, насколько хорошо вы можете охлаждать модуль. Печатная плата драйвера предназначена для отвода тепла от МОП-транзисторов, но производительность можно улучшить, добавив радиатор или принудительный поток воздуха. (Наоборот, производительность будет снижена в приложениях, которые ограничивают рассеивание тепла, таких как высокие температуры окружающей среды или работа в корпусах.) При достаточном дополнительном охлаждении драйвер может подавать до 6 А на фазу, прежде чем превысит номинальную мощность 1 Вт 30 Токоизмерительные резисторы мОм.
Ограничение тока драйвера устанавливается через интерфейс SPI. Вы можете подтвердить правильность настройки, используя мультиметр для измерения фактического тока через одну из катушек, когда шаговый двигатель находится в полношаговом режиме, а не в шаговом. Ток, который вы измеряете таким образом, будет составлять примерно 70% от установленного предела. Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Ток, который вы измеряете таким образом, будет составлять примерно 70% от установленного предела. Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Предупреждение: Этот драйвер двигателя не имеет функции отключения при перегреве (в то время как микросхема DRV8711 имеет защиту от перегрева, первыми перегреваются внешние МОП-транзисторы). Перегрев может привести к необратимому повреждению привода двигателя.