Содержание
Биполярная схема подключения шагового двигателя
Дмитрий Левкин
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи.
Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Конструкция шагового электродвигателя
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах.
Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты.
Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Характеристики
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления.
Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов.
С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.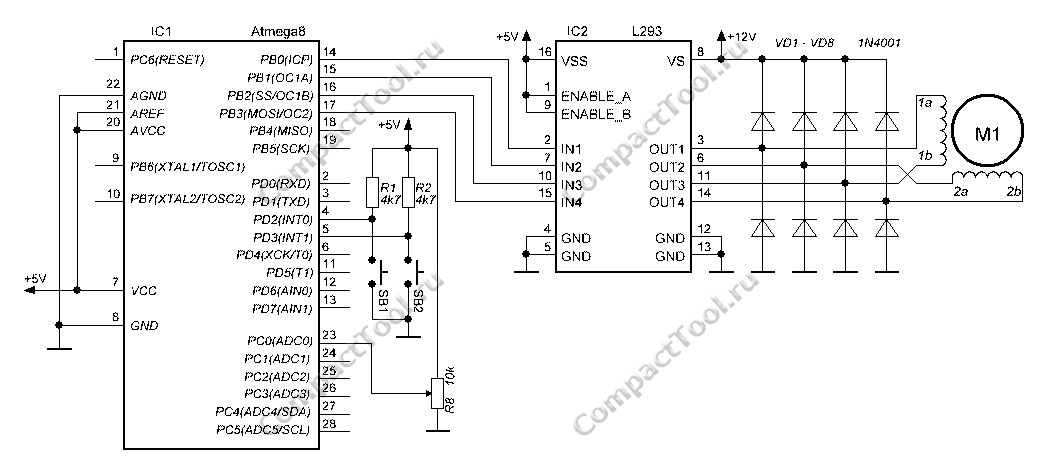
Типы шаговых двигателей
Реактивный шаговый двигатель
Реактивный шаговый двигатель — синхронный реактивный двигатель.
Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам.
В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.

Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала.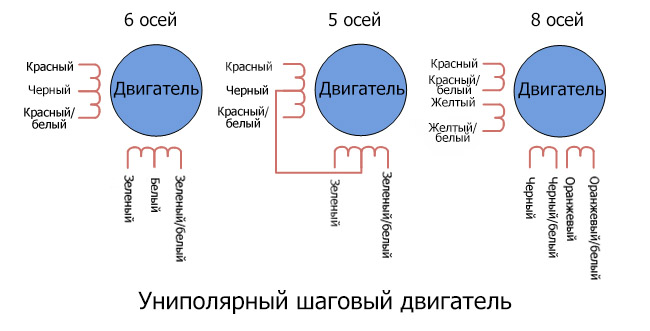 Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°).
Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°).
Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов.
Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода.
Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные.
Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока.
На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока.
Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В.
Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы.
5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель.
Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
 Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении.
Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления.
Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление — комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор — постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
Управление шаговым двигателем
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора.
На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами.
Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Типы шаговых двигателей
- Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
- Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
- Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле.
С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг.
При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает.
Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
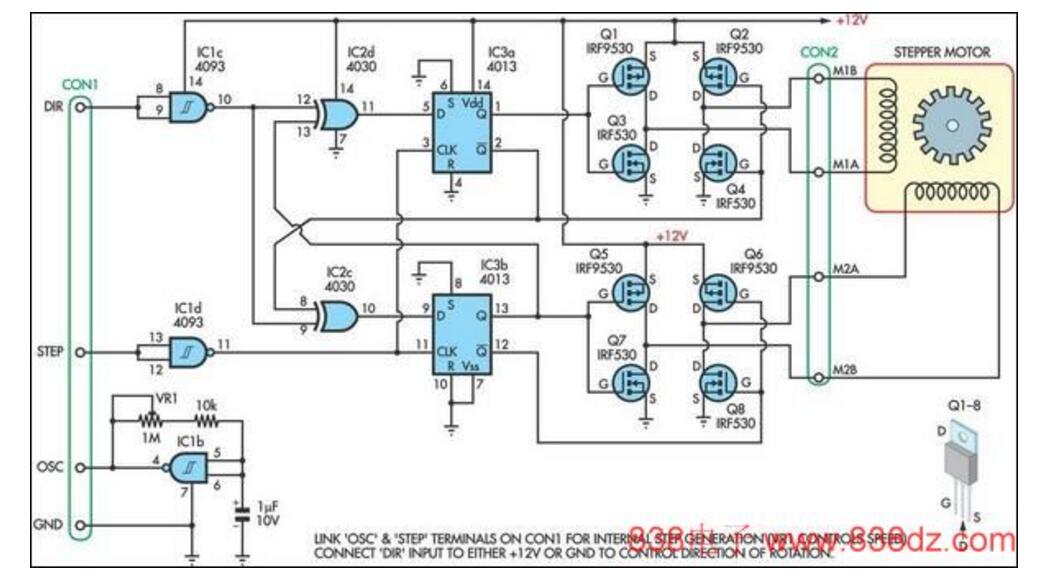
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Originally posted 2018-11-23 11:47:42. Republished by Blog Post Promoter
Шаговый Двигатель Схема Подключения
Формирование импульсов отводится микроконтроллерам например Arduino. В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора.
Путь для повышения магнитного поля — это увеличение тока или числа витков обмоток.
Управление биполярным шаговым двигателем
Двигатели с 4 обмотками имеют преимущество в том, что вы можете подключить обмотки любым удобным для вас образом и получить как биполярный, так и униполярный двигатель. Например, двигатели с дисковым намагниченным ротором. Полушаговое управление интересно тем, что становится возможным более точное позиционирование вала двигателя, благодаря к тому, что к целым шагам добавляются еще и половинки это достигается совмещение предыдущих двух режимов работы, а обмотки чередуются, то включаясь попарно, то по одной. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки на Рисунке 10 они не показаны. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Зависимость момента от скорости, влияние нагрузки Момент, создаваемый шаговым двигателем, зависит от нескольких факторов: скорости. Причиной этого является фильтрующее действие инерции ротора и нагрузки. Управление шаговым двигателем
Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки на Рисунке 10 они не показаны. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Зависимость момента от скорости, влияние нагрузки Момент, создаваемый шаговым двигателем, зависит от нескольких факторов: скорости. Причиной этого является фильтрующее действие инерции ротора и нагрузки. Управление шаговым двигателем
Сморите видео
Современные микроконтроллеры иногда имеют встроенные ЦАПы, которые можно использовать для реализации микрошагового режима взамен специальных контроллеров.
- Шаговый двигатель БЕЗ ДРАЙВЕРА!
- Еще по теме: Кабельные столбики пуэ
Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал. Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А. При этом используется номинальное число шагов. Синусоидальный ток фаз может быть обеспечен применением специальных драйверов. Это означает, что в таком режиме не может быть получен полный момент. Внутри находятся полюсные наконечники в виде ламелей.
Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А. При этом используется номинальное число шагов. Синусоидальный ток фаз может быть обеспечен применением специальных драйверов. Это означает, что в таком режиме не может быть получен полный момент. Внутри находятся полюсные наконечники в виде ламелей.
Виды шаговых двигателей по типу ротора:
После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. Для устранения колебаний момента при работе двигателя в полушаговом режиме можно снижать ток в те моменты, когда включены две фазы. Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А.
Упрощенная схема коммутатора шагового двигателя без реверса. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания. Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения особенно на очень низких скоростях , для устранения шума и явления резонанса. Зависимость момента от угла поворота ротора для двух запитанных обмоток. Обычно у них четыре вывода, две обмотки. В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов рис.
Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения особенно на очень низких скоростях , для устранения шума и явления резонанса. Зависимость момента от угла поворота ротора для двух запитанных обмоток. Обычно у них четыре вывода, две обмотки. В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов рис.
Назначение этих диодов — гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно.
Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы.
Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы.
Обеспечивает паспортное значение электрических характеристик. Драйверы делятся на две категории: Повторяющие форму сигналов. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения.
С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC ON MOSFET, но с учетом рекомендаций, описанных выше. Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
Технические характеристики A4988
Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала.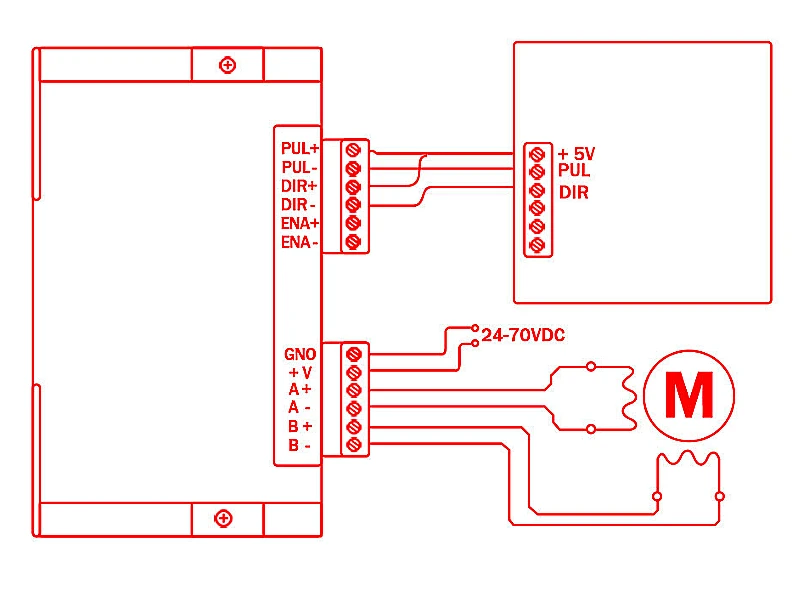 Можно увеличить количество шагов в 16, 32, 64 раза и т.
Можно увеличить количество шагов в 16, 32, 64 раза и т.
Поддержка такого режима для указанного драйвера осуществляется микропроцессором, управляющим входами ЦАП. Таким образом, выполняется один шаг.
Шаговые двигатели.
Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки. Режим управления двигателем задается коммутатором. Шаговые двигатели.
Рекомендуем: Необходимый метериал для проведения электричества
Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление — соответственно вдвое меньше. Так, пожалуй, можно дать строгое определение. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой.
Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
Общие сведения:
Микрошаговый режим. Режим удержания уменьшает максимальный ток, потребляемый обмотками двигателя, с двух до одного ампера. Диаграммы, диаграммы
В пределе, шаговый двигатель может работать как синхронный электродвигатель в режиме непрерывного вращения. Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах.
Описание библиотеки для работы с шаговым двигателем В среде разработки Ардуино IDE существует стандартная библиотека Strepper. Гибридный двигатель. Обзор копеечной платы управления шаговым двигателем.
*** Сайт принадлежит Елене Кравцовой Adblockdetector
Изучаем миниатюрный шаговый двигатель
Шаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками. Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем.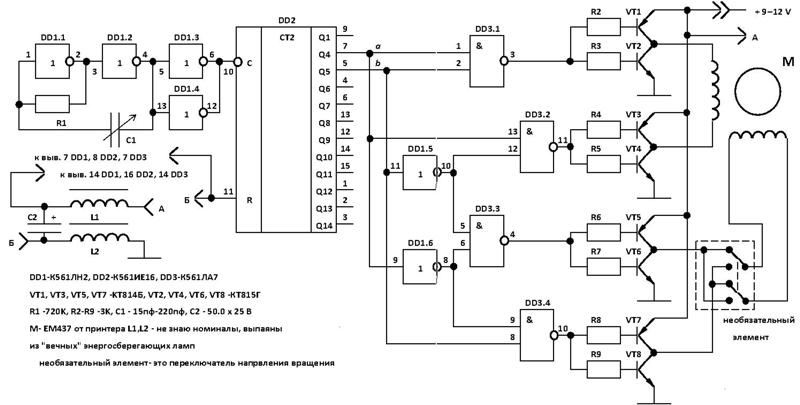 Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов. Результатами своих поисков и экспериментами я поделюсь в этой статье. Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов. Результатами своих поисков и экспериментами я поделюсь в этой статье. Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
- драйвер L293D + микроконтроллер ATtiny44;
- драйвер TMC2208 + микроконтроллер ATtiny44;
- микроконтроллер ATtiny44 (без драйвера).
Собственно вопросы тут может вызвать только последний пункт. Поверьте, я тоже был удивлён, когда наткнулся на ролик (вот он), где парень просто берёт и напрямую цепляет шаговый мотор к пинам микроконтроллера! Но давайте обо всём по порядку.
Знакомство
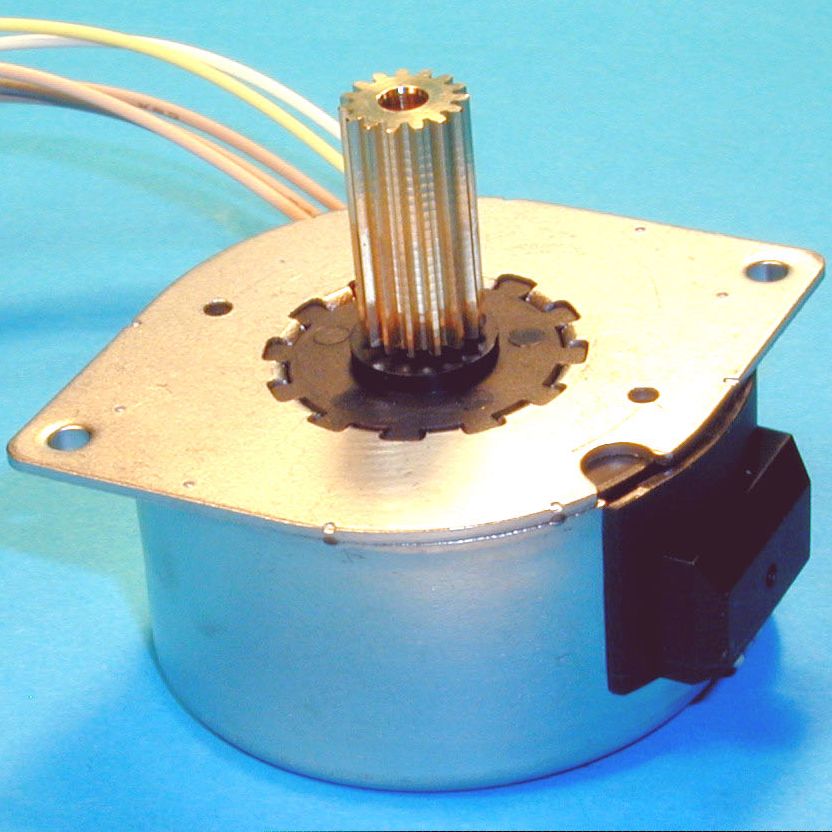
Сначала немного посмотрим на внешний вид нашего героя: Он действительно очень маленький! Согласно умной книжке Петренко С.Ф. «Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным. Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
Посмотрим как он устроен:
Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать. Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
В описании сказано, что напряжение питания 5В. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки. Пробуем подключить.
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга.
Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост.
Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше.
Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.
Итак, схема: Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал. Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан). Вот как выглядит собранная схема на макетной плате: И вот так расположен наш подопытный: Теперь можно приступать к экспериментам. Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В: I=U/R = 5В/26Ом = 190мА Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться. Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны.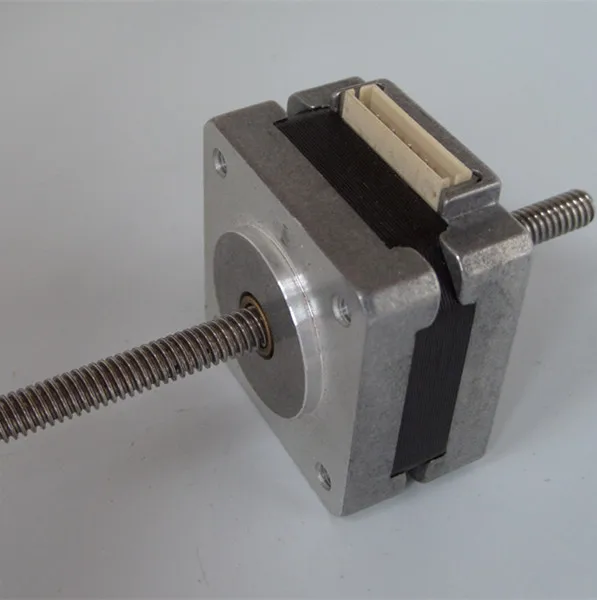 И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
- Полношаговый однофазный это когда одновременно напряжение подаётся только на одну фазу двигателя, ротор делает шаг, затем текущая фаза выключается и включается следующая.
- Полношаговый двухфазный это когда напряжение подаётся одновременно на две фазы мотора, при этом, ротор притягивается одновременно к двум обмоткам, что создаёт больший крутящий момент.
- Микрошаговый режим в этом случае реализуется тот же принцип, что и на полношаговом двухфазном, то есть работают одновременно две обмотки, но напряжение (и как следствие ток) распределяется между ними неравномерно. Фактически, это означает, что мы можем поставить моторчик в неограниченное количество положений (на практике, разумеется, такого сделать нельзя). Увеличивается точность позиционирования.
Попробуем реализовать первые два режима на микросхеме L293D а для микрошагового режима оставим специальный драйвер из второго эксперимента. Исходный код программы выглядит следующим образом: Исходный код в среде WinAVR #define F_CPU 8000000UL // указываем частоту в герцах
Исходный код программы выглядит следующим образом: Исходный код в среде WinAVR #define F_CPU 8000000UL // указываем частоту в герцах
// фьюзы необходимо выставить L: E2; H:DF; Ex:FF;
// это будет частота 8МГц от внутреннего генератора с выключенным предделителем тактовый частоты (включен по умолчанию и равен 8)
#include // подключаем библиотеку АВР
#include // подключаем библиотеку задержек
#include // подключаем библиотеку прерываний
// управление штатным светодиодом
#define LED_pin PA5
#define LED_ON PORTA |=(1
Подключение шагового двигателя Комментировать
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя.
Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ.
ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Подключение шагового двигателя
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами. Каждая из двух фазных обмоток такого электродвигателя имеет пару проводов с непрерывной связью. Драйвер ШД в данном случае подключается пошагово.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам.
Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов.
Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу.
Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов.
Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*.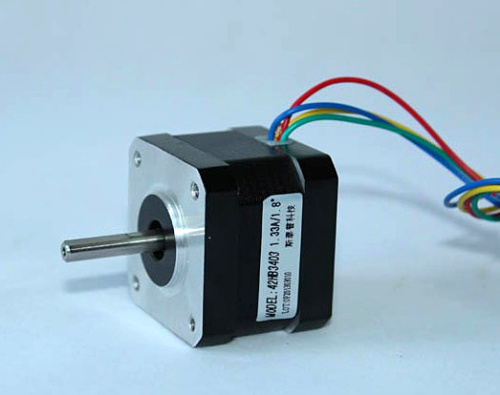 Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
Биполярный шаговый двигатель типоразмер 42 мм, цена в Рефит
Главная
Биполярные
Биполярный шаговый двигатель типоразмер 42 мм
Шаговый двигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками электрический двигатель, в котором подача электрического тока на одну из обмоток приводит к тому, что его ротор фиксируется в строго определённом положении. Последовательное подключение обмоток приводит к вращательному движению на заданный угол. Благодаря этому, угол поворота ротора зависит от количества последовательных переключений обмоток, а скорость вращения ротора равна частоте переключения обмоток умноженной на угол поворота ротора за одно переключение.
Последовательное подключение обмоток приводит к вращательному движению на заданный угол. Благодаря этому, угол поворота ротора зависит от количества последовательных переключений обмоток, а скорость вращения ротора равна частоте переключения обмоток умноженной на угол поворота ротора за одно переключение.
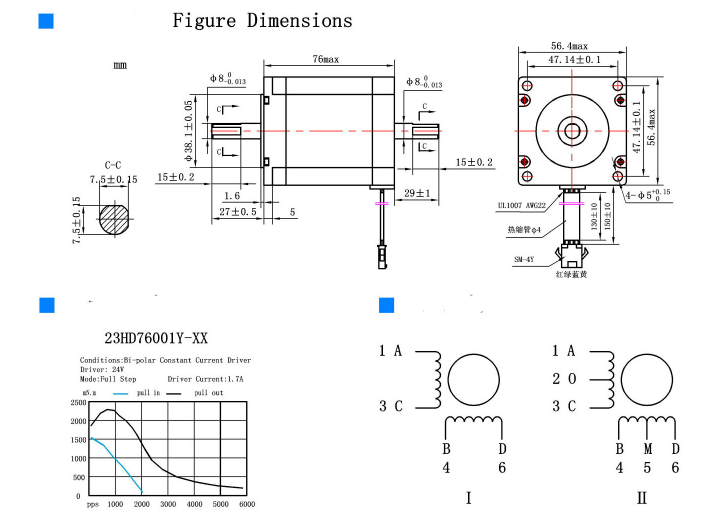
Наибольшее распространение получили двухфазные(биполярные) шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Производитель гарантирует точность шага без нагрузки до 5 % от величины шага. Шаговые двигатели, в зависимости от конструкции и режима управления могут выполненять от доли оборота в секунду до нескольких тысяч оборотов в секунду.
Преимущества и недостатки шагового двигателя:
Преимущества:
- Главное преимущество шаговых приводов — точность. При подаче тока в обмотки шаговый двигатель повернется строго на определенный угол. Ошибка позиционирования в пределах 3 — 5% шага и эта ошибка не накапливается от шага к шагу.
- Зависимость оборотов двигателя от дискретных импульсов позволяет управлять двигателем без обратной связи.
- Стоимость шаговых приводов, в среднем в 1,5-2 раза дешевле сервоприводов. Шаговый привод, как недорогая альтернатива сервоприводу, наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Недостатки:
- Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения. Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ.
- Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага.
Основные характеристики:
- Погрешность шага — 5% (полный шаг, без нагрузки)
- Погрешность сопротивления ±10%
- Погрешность индуктивности ±20%
- Максимальная температура 80º С max (номинальный ток, 2 фазы)
- Рабочий диапазон температур от -20º С до +50ºС
- Сопротивление изоляции 100МΩ Min. , 500VDC
- Диэлектрическая стойкость 500VAC в одну минуту
- Радиальное биение вала 0,02 мм (при нагрузке 450 г)
- Осевое биение вала 0,08 мм (при нагрузке 450 г)
 , 500VDC
, 500VDC
| Модель | Шаг (угол поворота) | Ном. напряжение, V | Ток/ фаза, А | Сопротивление/ фаза, Ω | Индуктивность/ фаза, mH | Момент удержания, кг.см | Кол-во выходов | Масса, кг | Цена за шт. с НДС, грн* |
|---|---|---|---|---|---|---|---|---|---|
| SM42HT38-1684A | 1,8° | 2,8 | 1,68 | 1,65 | 3,2 | 3,6 | 4 | 0,28 | 736.80 |
| 42BHh58W-200-24 | 1,8° | 3,0 | 2,0 | 1,5 | 3,0 | 4,3 | 4 | 0,24 | |
| 42J1848–408 | 1,8° | – | 0,8 | 7,5 | 10 | 4 | 4 | 0,21 | 864.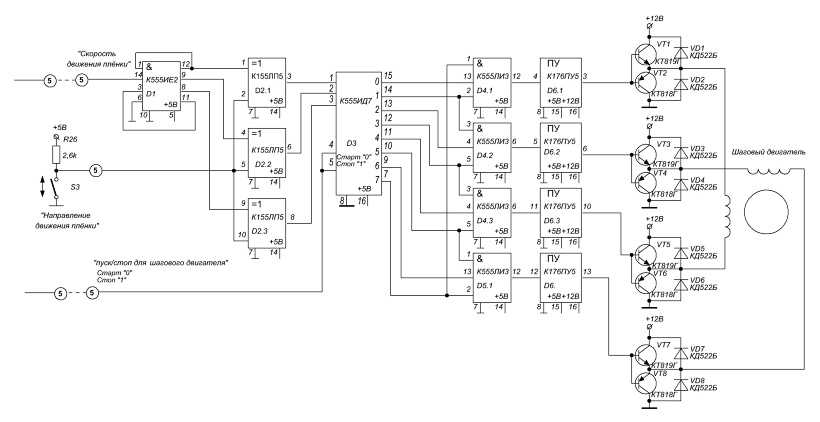 50 50 |
* — указанные цены не являются публичной офертой, носят исключительно информационный характер и могут отличаться от действительных цен.
Скачать:
- каталог шаговых двигателей JMC
- каталог шаговых двигателей SM
- каталог шаговых двигателей CW
Геометрические размеры:
| Модель | LC | L | LA | LB | LE | LF | LZ | LR | LT | S |
|---|---|---|---|---|---|---|---|---|---|---|
| SM42HT38-1684A | 42 | 38 | 31 | 22 | 2 | – | 4,5 | 24 | – | 5 |
| CW42BHh58W-200-24 | 42 | 48 | 31 | 22 | 2 | – | 4,5 | 24 | – | 5 |
| 42J1848-408 | 42 | 40 | 31 | 22 | 1,8 | – | 4 | 24 | – | 5 |
Похожие товары
Биполярный шаговый двигатель типоразмер 110 мм
Биполярный шаговый двигатель типоразмер 86 мм
Биполярный шаговый двигатель типоразмер 60 мм
Добавить комментарий
Copyright © 2022 refit. com.ua All rights reserved.
com.ua All rights reserved.
Created by Siter.in.ua.
Как сделать из обычного двигателя шаговый
Содержание
- Шаговые двигатели (подробный разбор 4 типов)
- Общие сведения:
- Виды шаговых двигателей по типу ротора:
- Какой тип шагового двигателя у меня?
- Виды шаговых двигателей по типу соединения электромагнитов статора:
- Какой тип шагового двигателя у меня?
- Режимы работы шаговых двигателей:
- Пример работы шаговых двигателей с разными видами роторов:
- Подключение шаговых двигателей к Arduino:
- Простой в изготовлении контроллер шагового двигателя из старых деталей
- Шаговый двигатель
- Принципы действия биполярных и униполярных шаговых двигателей
- Виды шаговых двигателей
- Особенности управления
- Основные достоинства
- Основные недостатки
- Характеристики
- Сфера применения
- Шаговый двигатель
- Конструкция шагового электродвигателя
- Характеристики
- Типы шаговых двигателей
- Реактивный шаговый двигатель
- Шаговый двигатель с постоянными магнитами
- Униполярный (однополярный) шаговый двигатель
- Биполярный шаговый двигатель
- Управление шаговым двигателем с постоянными магнитами
- Волновое управление
- Полношаговое управление
- Полушаговое управление
- Гибридный шаговый двигатель
- Видео
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно).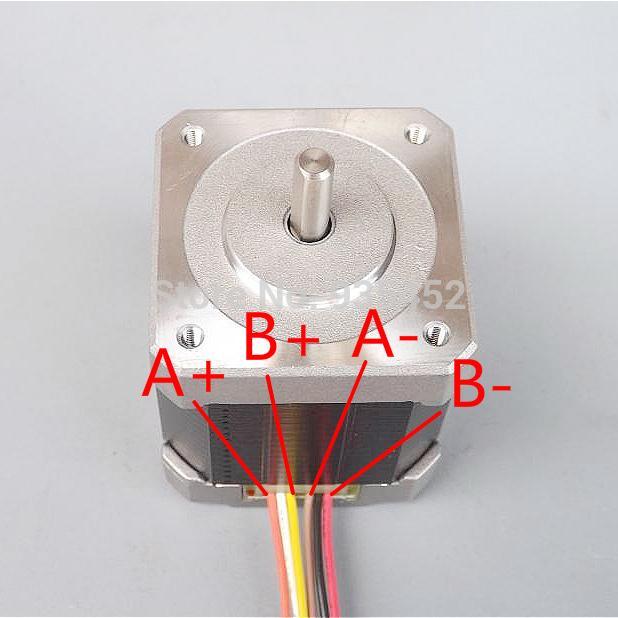 Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель.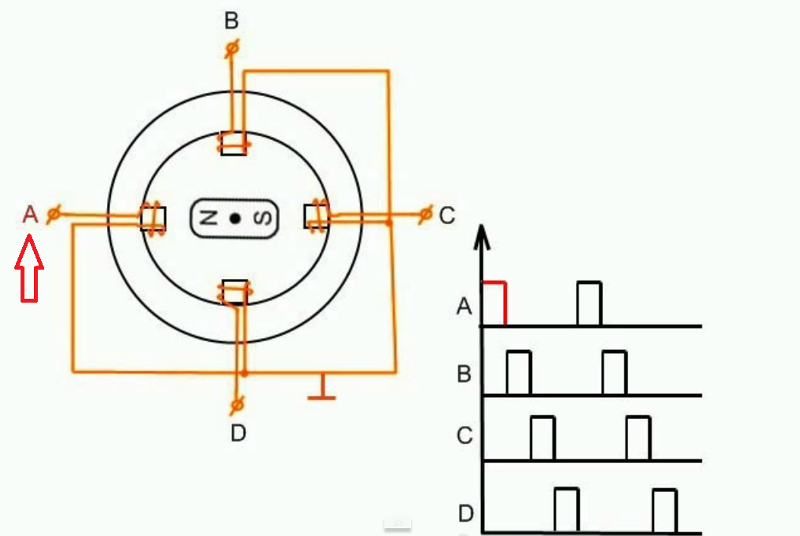 Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
Источник
Простой в изготовлении контроллер шагового двигателя из старых деталей
Шаг 1.
От старого сканера:
Для управляющего компьютера:
Шаг 2.
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Шаг 3.
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.
Шаг 4.
Шаг 5.
Шаг 6.
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите «C: cncTURBOCNC». Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно «A: cncTURBOCNC». Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню «Configure». При помощи клавиш со стрелками выберите «number of axis». Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем «1». Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню «Configure» выберите пункт «Configure axes», затем дважды нажмите Enter.
Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню «Configure». При помощи клавиш со стрелками выберите «number of axis». Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем «1». Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню «Configure» выберите пункт «Configure axes», затем дважды нажмите Enter.
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке «Drive Type». При помощи стрелки вниз выберите пункт «Phase». Снова при помощи Tab выберите ячейку «Scale». Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48.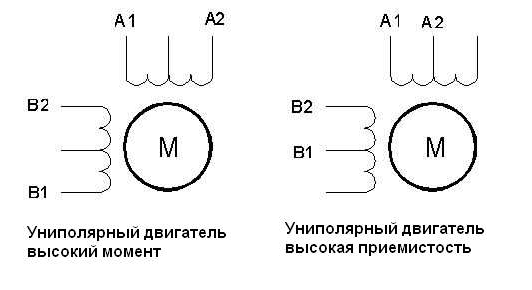 Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.
Шаг 7.
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске. Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.
Шаг 8.
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером.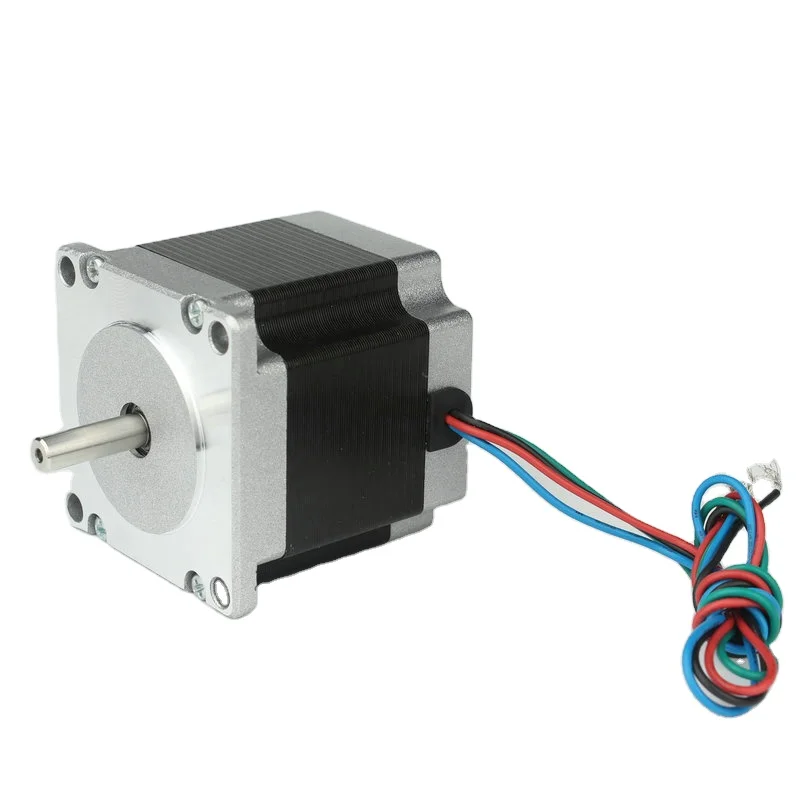 Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.
Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.
Шаг 9.
Изготовление корпуса
Часть 1
Шаг 10.
Изготовление корпуса
Часть 2
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.
Шаг 11.
Для настройки первой оси делайте все как было сказано выше, для второй оси тоже, но в строках первых четырех фаз введите следующее:
«XXXX1000XXXX
XXXX0100XXXX
XXXX0010XXXX
XXXX0001XXXX»
Для третьей оси в строках первых четырех фаз введите:
«XXXXXXXX1000
XXXXXXXX0100
XXXXXXXX0010
XXXXXXXX0001″
Перевод: Piyavka, по заказу РадиоЛоцман
Источник
Шаговый двигатель
Шаговый двигатель представляет собой устройство, преобразующее электрическую энергию в механическую. По конструкции это бесколлекторный синхронный мотор с ротором, совершающим дискретные перемещения с фиксацией положения после каждого смещения. Величина шага строго определена, что позволяет вычислять абсолютную позицию ротора, подсчитав количество шагов.
По конструкции это бесколлекторный синхронный мотор с ротором, совершающим дискретные перемещения с фиксацией положения после каждого смещения. Величина шага строго определена, что позволяет вычислять абсолютную позицию ротора, подсчитав количество шагов.
Принципы действия биполярных и униполярных шаговых двигателей
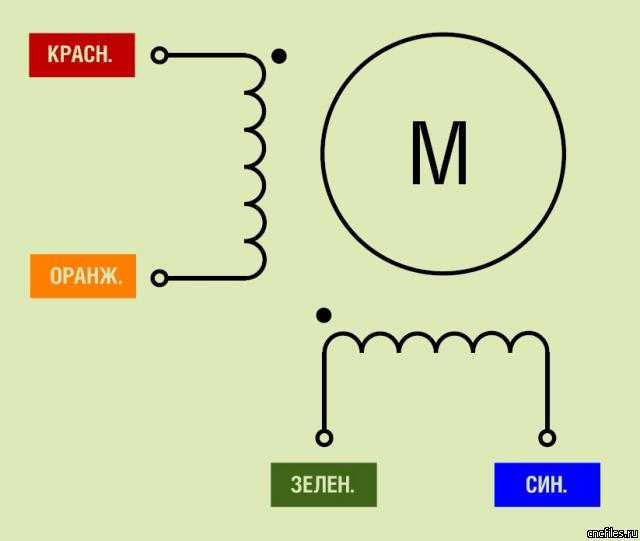
Биполярный
Основные элементы шагового двигателя – ротор и статор. Первый представляет собой постоянный двухполюсный магнит. Он располагается на валу устройства. Статор – это замкнутый магнитопровод в виде кольца, он состоит из двух обмоток, половинки которых находятся на противоположных полюсах. На обмотке АВ – вертикально размещенные, на СD – горизонтально расположенные.
Униполярный
Выше был описан принцип работы биполярного шагового двигателя – у него для каждой фазы предусмотрено две обмотки. Чтобы менять магнитное поле, необходимо каждую обмотку:
Осуществить коммутацию позволяет мостовой драйвер, который представляет собой сложную микросхему. Такой вариант подходит, если ток коммутации не превышает 2 А. Решить вопрос с управлением биполярным двигателем значительно сложнее при потребности в больших коммутационных токах. Значительно проще менять магнитное поле в статоре шагового двигателя, если использовать устройство с униполярными обмотками. В этом случае один вывод у всех четырех обмоток подсоединен к плюсовому выводу, а А, В, С и D последовательно подсоединяются к минусовому сигналу. В результате при каждой коммутации создается магнитное поле, заставляющее ротор двигателя повернуться. Коммутация по такому принципу обеспечивается четырьмя ключами, которые замыкают обмотки на землю. Управление ключами обычно осуществляется с выводов микроконтроллера.
Такой вариант подходит, если ток коммутации не превышает 2 А. Решить вопрос с управлением биполярным двигателем значительно сложнее при потребности в больших коммутационных токах. Значительно проще менять магнитное поле в статоре шагового двигателя, если использовать устройство с униполярными обмотками. В этом случае один вывод у всех четырех обмоток подсоединен к плюсовому выводу, а А, В, С и D последовательно подсоединяются к минусовому сигналу. В результате при каждой коммутации создается магнитное поле, заставляющее ротор двигателя повернуться. Коммутация по такому принципу обеспечивается четырьмя ключами, которые замыкают обмотки на землю. Управление ключами обычно осуществляется с выводов микроконтроллера.
При выборе шагового двигателя следует учитывать, что биполярный, при тех же габаритах, что и униполярный, обеспечивает больший крутящий момент. Выигрыш достигает 40 %. Это связано с тем, что в шаговом униполярном двигателе задействуется одна обмотка, а в биполярном две. Преимуществом устройства с одной обмоткой является простое управление.
Виды шаговых двигателей
Существует несколько разновидностей. К наиболее востребованным относятся модели с переменным магнитным сопротивлением, с постоянным магнитом и гибридные.
Устройства с переменным магнитным сопротивлением
Такие шаговые двигатели не имеют постоянных магнитов в роторе. Для изготовления ротора зубчатой формы используется магнитомягкий материал. Его вращение обеспечивается за счет замыкания магнитного поля статора через зубцы, располагающиеся вблизи полюсов. Зубцы к полюсам притягиваются и ротор поворачивается. Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Устройства с постоянными магнитами
На примере такого устройства выше разъяснялся принцип работы шаговых двигателей. В реальности роторы таких двигателей имеют несколько постоянных магнитов. От их количества зависит число шагов, за которое ротор выполняет полный оборот.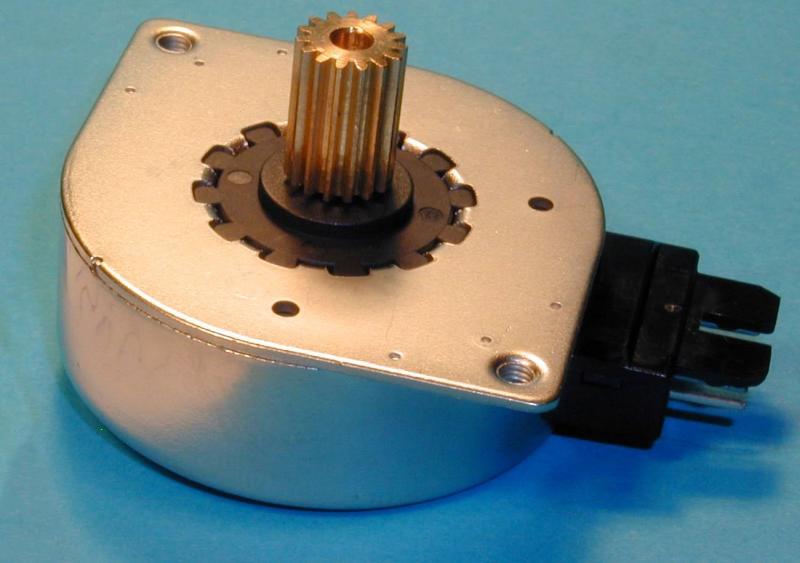 Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Гибридные устройства
В конструкции шаговых гибридных двигателей присутствует и зубчатый ротор, и постоянные магниты. Функционирует устройство по тому же принципу, что и двигатель с постоянными магнитами, но гибридный вариант отличается большим числом полюсов. За счет такого количества полюсов у гибридных шаговых двигателей больший момент, выше скорость и меньше величина шага. Максимальное число на один оборот может доходить до 400, при этом угол шага составляет 0,9 градусов. Гибридные устройства сложнее в изготовлении и дороже шаговых устройств других типов, но благодаря высокой функциональности пользуются спросом.
Особенности управления
Для управления двигателем с дискретным движением ротора используются следующие режимы: полношаговый, полушаговый и микрошаговый.
Полношаговый режим
При таком способе двигателем производится попеременная коммутация фаз.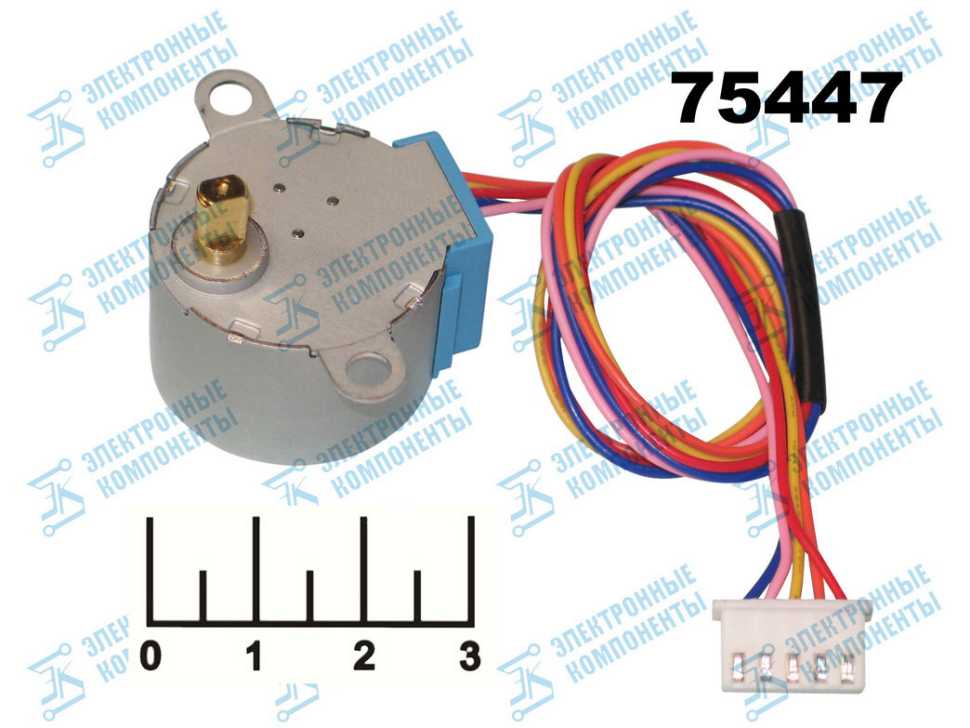 При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
Полушаговый режим
Если каждый второй шаг включать одну фазу, а между этим включать сразу две, можно увеличить количество перемещений на один оборот в два раза. Такая коммутация, соответственно, в два раза уменьшает угол шага. При этом достичь полного момента в полушаговом режиме невозможно. Режим активно используется, так как позволяет простым способом вдвое увеличить число шагов двигателя. Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания. Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания. Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Микрошаговый режим
Чтобы максимально увеличить число шагов двигателя, используется микрошаговый режим. Для этого требуется включить две фазы и распределить ток обмоток неравномерно. При смещении магнитного поля статора относительно полюсов смещается и сам ротор. У диспропорции токов между рабочими фазами двигателя обычно наблюдается дискретность, которая определяет величину микрошага. Количество микрошагов на один оборот ротора шагового двигателя может составлять более 1 000. Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Основные достоинства
К достоинствам шаговых двигателей относят:
К недостаткам шаговых двигателей можно отнести:
Характеристики
Двигатель шагового типа является сложным механическим и электротехническим устройством. Список основных характеристик, которые следует учитывать при выборе устройства, включает:
Сфера применения
Шаговые двигатели рассчитаны на использование в составе устройств с дискретным управлением, где необходимо точно позиционировать исполнительные механизмы. Также они применяются в промышленном оборудовании с программным управлением, где требуется обеспечить непрерывное движение по заданной траектории и импульсное влияние исполнительными механизмами. Ротор шагового двигателя способен поворачиваться на заданный угол и на определенное количество оборотов вокруг своей оси. Благодаря этому шаговые устройства позволяют позиционировать считывающие головки проигрывателей оптических дисков, дисковых накопителей, печатающих головок сканеров, принтеров и иных устройств. Такие двигатели широко используются не только на производстве и в составе бытовой техники. Эти устройства востребованы радиотехниками, робототехниками, мастерами-любителями, изготавливающими самодельные станки с ЧПУ, движущиеся устройства и т. д. Для управления применяются специально разработанные контроллеры либо сложные электронные схемы. Управлять импульсными сигналами, заставляющими двигатель работать в заданном режиме, также можно через порт компьютера.
Такие двигатели широко используются не только на производстве и в составе бытовой техники. Эти устройства востребованы радиотехниками, робототехниками, мастерами-любителями, изготавливающими самодельные станки с ЧПУ, движущиеся устройства и т. д. Для управления применяются специально разработанные контроллеры либо сложные электронные схемы. Управлять импульсными сигналами, заставляющими двигатель работать в заданном режиме, также можно через порт компьютера.
Источник
Шаговый двигатель
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.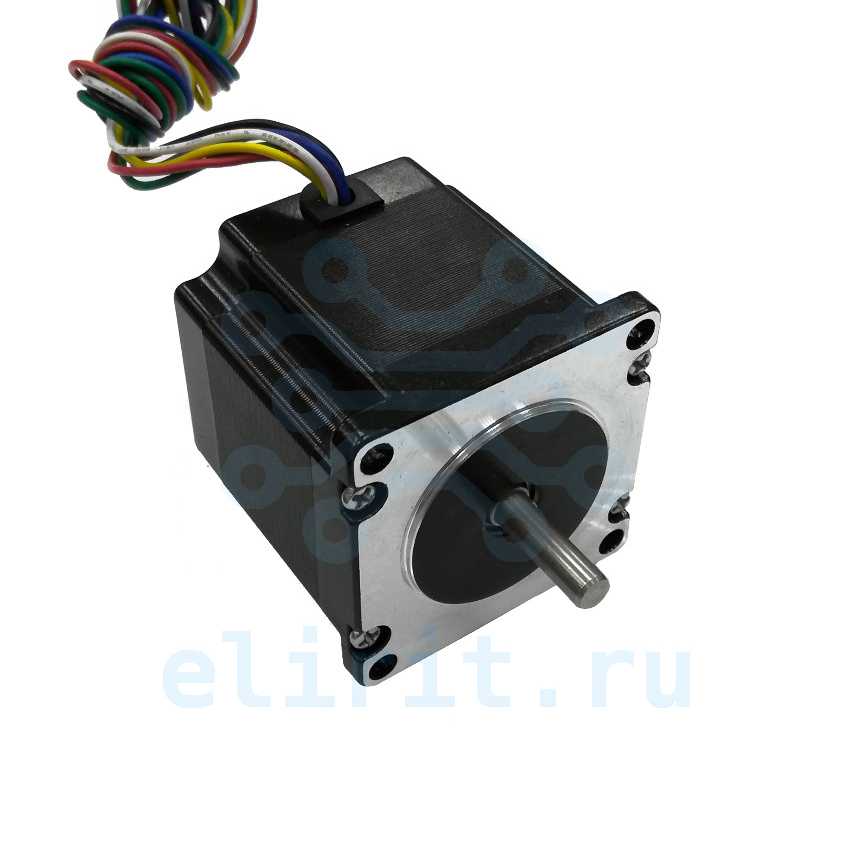
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Конструкция шагового электродвигателя
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Характеристики
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Типы шаговых двигателей
Реактивный шаговый двигатель
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].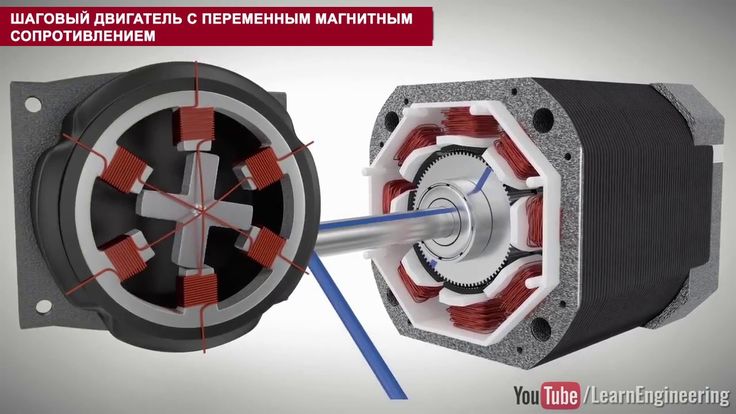
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом.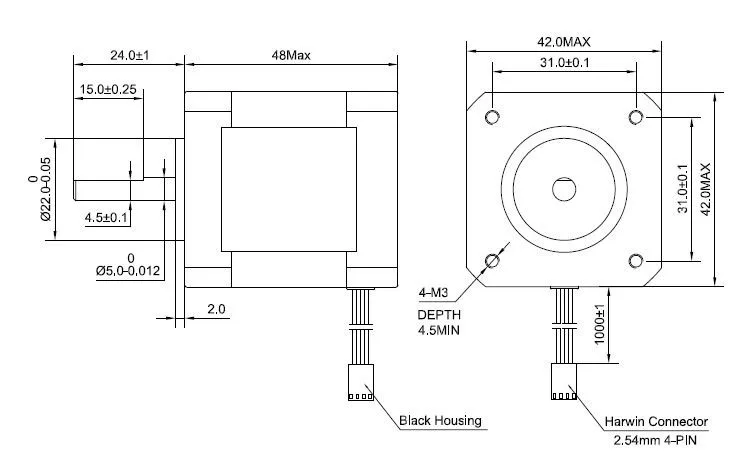 Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления.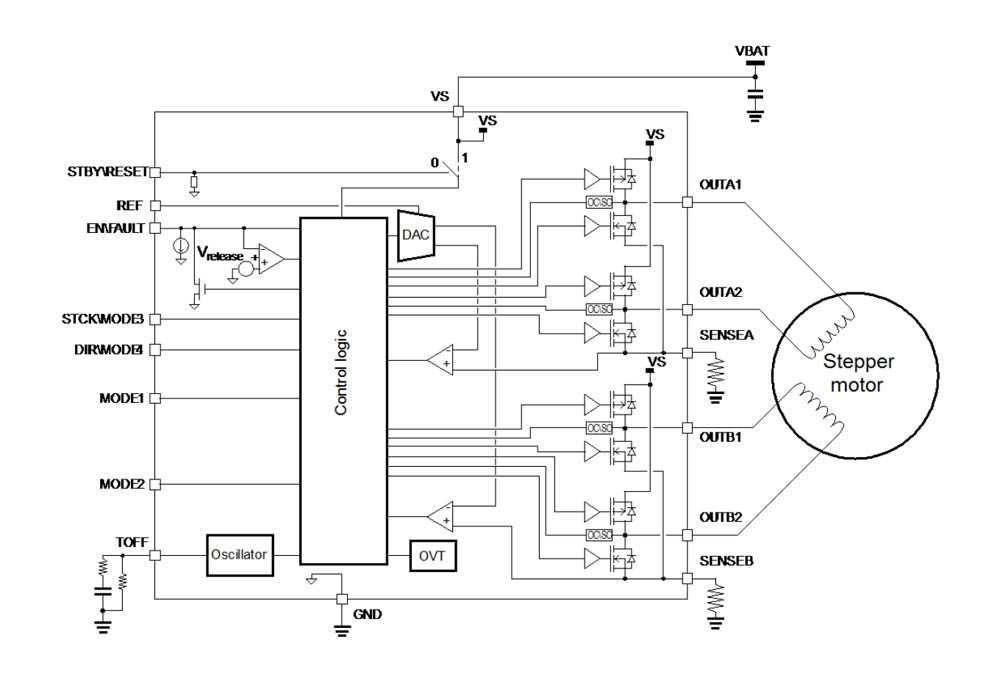 Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Гибридный шаговый двигатель
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
Источник
Видео
Самоделки из шагового двигателя.Зарядка для телефона,фонарик и высоковольтный преобразователь.
Переделка шагового двигателя в обычный биполярный
Принцип работы шагового двигателя
Шаговый двигатель своими руками
🌑 ГЕНЕРАТОР ИЗ ШАГОВОГО ДВИГАТЕЛЯ ИЛИ ТАК ЛИ ОН ХОРОШ? ПРОВЕДЕМ ЭКСПЕРИМЕНТ ИГОРЬ БЕЛЕЦКИЙ
ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]
Шаговый двигатель, как подключить без сложностей!!!!
Принцип работы шагового двигателя на примере Nema 17/ ШД HS4401
ШАГОВЫЙ ДВИГАТЕЛЬ ПРОСТОЙ ДРАЙВЕР ДЛЯ НЕГО
🔨 КАК ЗАПУСТИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ 💡 Без Драйвера!
Управление фазами шагового двигателя
Существует несколько способов управления фазами шагового двигателя.
Первый способ обеспечивается попеременной
коммутации фаз, при этом они не перекрываются, в один момент времени
включена только одна фаза (рис 8а). Этот способ называют «one phase on»
full step или wave drive mode. Точки равновесия ротора для каждого шага
совпадают с точками равновесия ротора у незапитанного
двигателя. Недостатком этого способа управления является то, что для
биполярного двигателя в один и тот же момент времени иcпользуется 50%
обмоток, а для униполярного — только 25%. Это означает, что в таком режиме
не может быть получен полный момент.
Рис. 8. Различные способы управления фазами шагового двигателя.
Второй способ — управление фазами с перекрытием: две фазы
включены в одно и то же время. Его называют «two-phase-on» full step или
просто full step mode. При этом способе управления ротор фиксируется в
промежуточных позициях между полюсами статора (рис.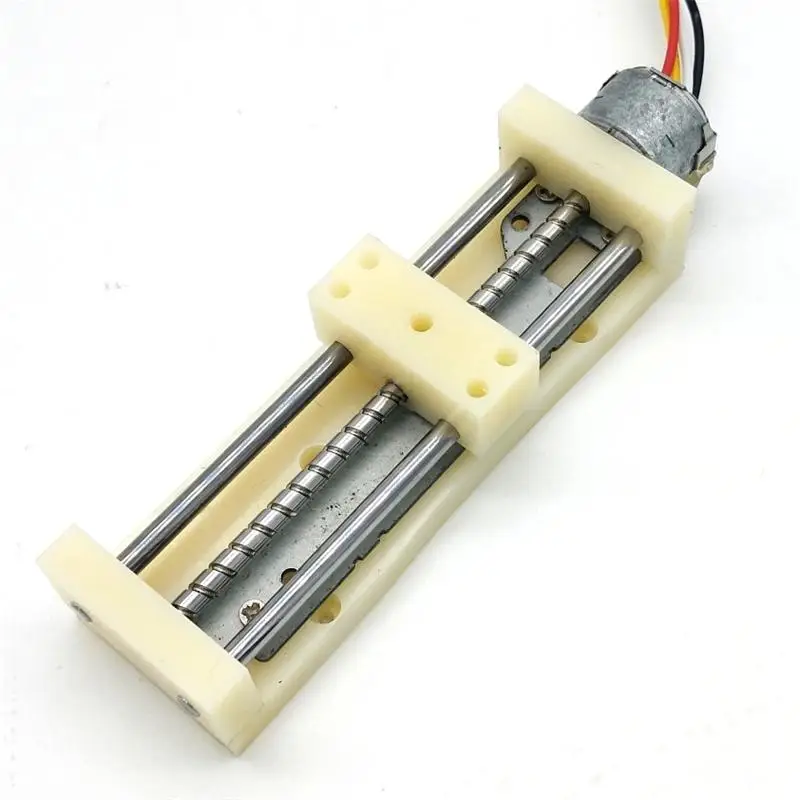 8б) и обеспечивается
8б) и обеспечивается
примерно на 40% больший момент, чем в случае одной включенной фазы. Этот
способ управления обеспечивает такой же угол шага, как и первый способ, но
положение точек равновесия ротора смещено на пол-шага.
Третий способ является комбинацией первых двух и
называется полушаговым режимом, «one and two-phase-on» half step или
просто half step mode, когда двигатель делает шаг в половину основного.
Этот метод управления достаточно распространен, так как двигатель с
меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового
двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза,
а в остальных случаях запитаны две (рис. 8в). В результате угловое
перемещение ротора составляет половину угла шага для первых двух способов
управления. Кроме уменьшения размера шага этот способ управления позволяет
частично избавиться от явления резонанса. Полушаговый режим обычно не
позволяет получить полный момент, хотя наиболее совершенные драйверы
реализуют модифицированный полушаговый режим, в котором двигатель
обеспечивает практически полный момент, при этом рассеиваемая мощность не
превышает номинальной.
Еще один способ управления называется микрошаговым режимом
или micro stepping mode. При этом способе управления ток в фазах нужно
менять небольшими шагами, обеспечивая таким образом дробление половинного
шага на еще меньшие микрошаги. Когда одновременно включены две фазы, но их
токи не равны, то положение равновесия ротора будет лежать не в середине
шага, а в другом месте, определяемом соотношением токов фаз. Меняя это
соотношение, можно обеспечить некоторое количество микрошагов внутри
одного шага. Кроме увеличения разрешающей способности, микрошаговый режим
имеет и другие преимущества, которые будут описаны ниже. Вместе с тем, для
реализации микрошагового режима требуются значительно более сложные
драйверы, позволяющие задавать ток в обмотках с необходимой дискретностью.
Полушаговый режим является частным случаем микрошагового режима, но он не
требует формирования ступенчатого тока питания катушек, поэтому часто
реализуется.
Держи его!
В полношаговом режиме с двумя включенными фазами положения
точек равновесия ротора смещены на пол-шага. Нужно отметить, что эти
положения ротор принимает при работе двигателя, но положение ротора не
может сохраняться неизменным после выключения тока обмоток. Поэтому при
включении и выключении питания двигателя ротор будет смещаться на
пол-шага. Для того, чтобы он не смещался при остановке, необходимо
подавать в обмотки ток удержания. То же справедливо и для полушагового и
микрошагового режимов. Следует отметить, что если в выключенном состоянии
ротор двигателя поворачивался, то при включении питания возможно смещение
ротора и на большую, чем половина шага величину.
Ток удержания может быть меньше номинального, так как от
двигателя с неподвижным ротором обычно не требуется большого момента.
Однако есть применения, когда в остановленном состоянии двигатель должен
обеспечивать полный момент, что для шагового двигателя возможно. Это
Это
свойство шагового двигателя позволяет в таких ситуациях обходиться без
механических тормозных систем. Поскольку современные драйверы позволяют
регулировать ток питания обмоток двигателя, задание необходимого тока
удержания обычно не представляет проблем. Задача обычно заключается просто
в соответствующей программной поддержке для управляющего микроконтроллера.
Полушаговый режим
Основным принципом работы шагового двигателя является
создание вращающегося магнитного поля, которое заставляет ротор
поворачиваться. Вращающееся магнитное поля создается статором, обмотки
которого соответствующим образом запитываются.
Для двигателя, у которого запитана одна
обмотка, зависимость момента от угла поворота ротора относительно точки
равновесия является приблизительно синусоидальной. Эта зависимость для
двухобмоточного двигателя, который имеет N шагов на оборот (угол шага в
радианах S = (2*pi)/N), показана на рис. 9.
9.
Рис. 9. Зависимость момента от угла
поворота ротора для одной запитанной обмотки.
Реально характер зависимости может быть несколько другой,
что объясняется неидеальностью геометрии ротора и статора. Пиковое
значение момента называется моментом удержания. Формула, описывающая
зависимость момента от угла поворота ротора, имеет следующий вид:
T = — Th*sin((pi/2)/S)*Ф),
где T — момент, Th — момент удержания,
S — угол
шага,
Ф — угол поворота ротора.
Если к ротору приложить внешний момент, который превышает
момент удержания, ротор провернется. Если внешний момент не превышает
момента удержания, то ротор будет находится в равновесии в пределах угла
шага. Нужно отметить, что у обесточенного двигателя момент удержания не
равен нулю вследствие действия постоянных магнитов ротора. Этот момент
Этот момент
обычно составляет около 10% максимального момента, обеспечиваемого
двигателем.
Иногда используют термины «механический угол поворота
ротора» и «электрический угол поворота ротора». Механический угол
вычисляется исходя из того, что полный оборот ротора составляет 2*pi
радиан. При вычислении электрического угла принимается, что один оборот
соответствует одному периоду угловой зависимости момента. Для приведенных
выше формул Ф является механическим углом поворота ротора, а электрический
угол для двигателя, имеющего 4 шага на периоде кривой момента, равен
((pi/2)/S)*Ф или (N/4)*Ф, где N — число шагов на оборот. Электрический
угол фактически определяет угол поворота магнитного поля статора и
позволяет строить теорию независимо от числа шагов на оборот для
конкретного двигателя.
Если запитать одновременно две обмотки
двигателя, то момент будет равен сумме моментов, обеспечиваемых обмотками
по отдельности (рис. 10).
10).
Рис. 10. Зависимость момента от угла поворота ротора для двух запитанных обмоток.
При этом, если токи в обмотках одинаковы, то точка
максимума момента будет смещена на половину шага. На половину шага
сместится и точка равновесия ротора (точка e на рисунке). Этот факт и
положен в основу реализации полушагового режима. Пиковое значение момента
(момент удержания) при этом будет в корень из двух раз больше, чем при
одной запитанной обмотке.
Th2 = 2 0.5*Th1,
где Th2 — момент удержания при двух
запитанных обмотках,
Th1 — момент удержания при одной
запитанной обмотке.
Именно этот момент обычно и указывается в характеристиках шагового двигателя.
Величина и направление магнитного поля показаны на векторной диаграмме (рис. 11).
11).
Рис. 11. Величина и направление магнитного поля для разных режимов питания фаз.
Оси X и Y совпадают с направлением магнитного поля,
создаваемого обмотками первой и второй фазы двигателя. Когда двигатель
работает с одной включенной фазой, ротор может занимать положения 1, 3, 5,
7. Если включены две фазы, то ротор может занимать положения 2, 4, 6, 8. К
тому же, в этом режиме больше момент, так как он пропорционален длине
вектора на рисунке. Оба эти метода управления обеспечивают полный шаг, но
положения равновесия ротора смещены на пол-шага. Если скомбинировать два
этих метода и подать на обмотки соответствующие последовательности
импульсов, то можно заставить ротор последовательно занимать положения 1,
2, 3, 4, 5, 6, 7, 8, что соответствует половинному шагу.
По сравнению с полношаговым режимом, полушаговый режим имеет следующие преимущества:
- более высокая разрешающая способность без применения
более дорогих двигателей - меньшие проблемы с явлением резонанса. Резонанс
приводит лишь к частичной потере момента, что обычно не мешает
нормальной работе привода.
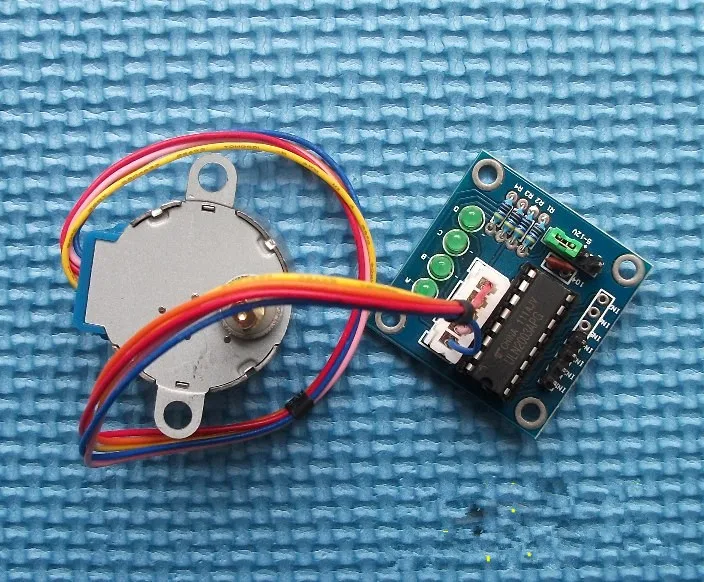 Резонанс
Резонанс
Недостатком полушагового режима является довольно
значительное колебание момента от шага к шагу. В тех положениях
ротора, когда запитана одна фаза, момент составляет примерно 70% от
полного, когда запитаны две фазы. Эти колебания могут явиться причиной
повышенных вибраций и шума, хотя они всё равно остаются меньшими, чем в
полношаговом режиме.
Способом устранения колебаний момента является поднятие
момента в положениях с одной включенной фазой и обеспечение таким образом
одинакового момента во всех положениях ротора. Это может быть достигнуто
путем увеличения тока в этих положениях до уровня примерно 141% от
номинального. Некоторые драйверы, такие как PBL 3717/2 и PBL 3770A фирмы
Ericsson, имеют логические входы для изменения величины тока. Нужно
отметить, что величина 141% является теоретической, поэтому в приложениях,
требующих высокой точности поддержания момента эта величина должна быть
подобрана экспериментально для конкретной скорости и конкретного
двигателя.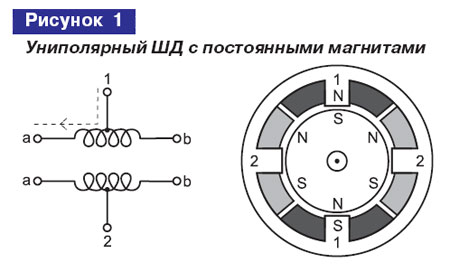 Поскольку ток поднимается только в те моменты, когда включена
Поскольку ток поднимается только в те моменты, когда включена
одна фаза, рассеиваемая мощность равна мощности в полношаговом режиме при
токе 100% от номинального. Однако такое увеличение тока требует более
высокого напряжения питания, что не всегда возможно. Есть и другой подход.
Для устранения колебаний момента при работе двигателя в полушаговом режиме
можно снижать ток в те моменты, когда включены две фазы. Для получения
постоянного момента этот ток должен составлять 70.7% от номинального.
Таким образом реализует полушаговый режим, например, микросхема драйвера
A3955 фирмы Allegro.
Для полушагового режима очень важным является переход в
состояние с одной выключенной фазой. Чтобы заставить ротор принять
соответствующее положение, ток в отключенной фазе должен быть уменьшен до
нуля как можно быстрее. Длительность спада тока зависит от напряжения на
обмотке в то время, когда она теряет свою запасенную энергию. Замыкая в
Замыкая в
это время обмотку на источник питания, который представляет максимальное
напряжение, имеющееся в системе, обеспечивается максимально быстрый спад
тока. Для получения быстрого спада тока при питании обмоток двигателя
H-мостом все транзисторы должны закрываться, при этом обмотка через диоды
оказывается подключенной к источнику питания. Скорость спада тока
значительно уменьшится, если один транзистор моста оставить открытым и
закоротить обмотку на транзистор и диод. Для увеличения скорости спада
тока при управлении униполярными двигателями подавление выбросов ЭДС
самоиндукции предпочтительнее осуществлять не диодами, а варисторами или
комбинацией диодов и стабилитрона, которые ограничат выброс на большем, но
безопасном для транзисторов уровне.
Микрошаговый режим
Микрошаговый режим обеспечивается путем
получения поля статора, вращающегося более плавно, чем в полно- или
полушаговом режимах.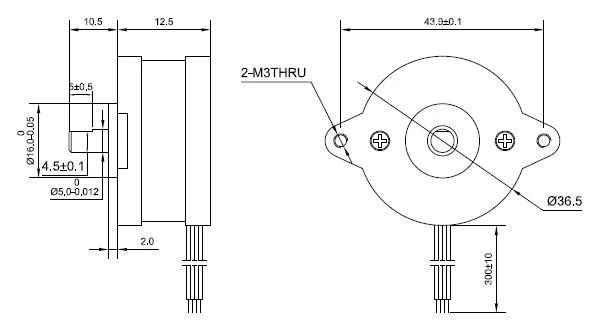 В результате обеспечиваются меньшие вибрации и
В результате обеспечиваются меньшие вибрации и
практически бесшумная работа вплоть до нулевой частоты. К тому же меньший
угол шага способен обеспечить более точное позиционирование. Существует
много различных микрошаговых режимов, с величиной шага от 1/3 полного шага
до 1/32 и даже меньше. Шаговый двигатель является синхронным
электродвигателем. Это значит, что положение равновесия неподвижного
ротора совпадает с направлением магнитного поля статора. При повороте поля
статора ротор тоже поворачивается, стремясь занять новое положение
равновесия.
Рис. 12. Зависимость момента от угла
поворота ротора в случае разных значений тока фаз.
Чтобы получить нужное направление магнитного поля,
необходимо выбрать не только правильное направление токов в катушках, но и
правильное соотношение этих токов.
Если одновременно запитаны две обмотки двигателя, но токи
в этих обмотках не равны (рис.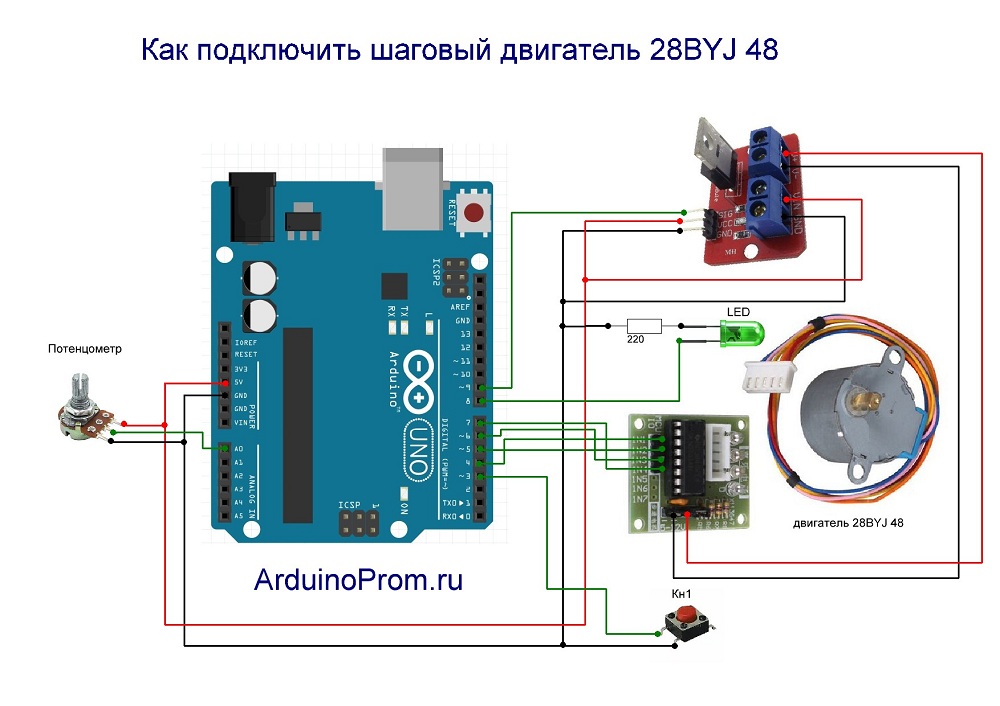 12), то результирующий момент будет
12), то результирующий момент будет
Th = ( a2 + b2 )0.5,
а точка равновесия ротора сместится в точку
x = ( S / (pi/2) ) arctan( b / a ),
где a и b — момент, создаваемый первой и второй фазой
соответственно,
Th — результирующий момент удержания,
x —
положение равновесия ротора в радианах,
S — угол шага в
радианах.
Смещение точки равновесия ротора говорит о том, что ротор
можно зафиксировать в любой произвольной позиции. Для этого нужно лишь
правильно установить отношение токов в фазах. Именно этот факт
используется при реализации микрошагового режима.
Ещё раз нужно
отметить, что приведенные выше формулы верны только в том случае, если
зависимость момента от угла поворота ротора синусоидальная и если ни одна
часть магнитной цепи двигателя не насыщается.
В пределе, шаговый двигатель может работать как синхронный
электродвигатель в режиме непрерывного вращения. Для этого токи его фаз
Для этого токи его фаз
должны быть синусоидальными, сдвинутыми друг относительно друга на 90
град.
Результатом использования микрошагового режима является
намного более плавное вращение ротора на низких частотах. На частотах в 2
— 3 раза выше собственной резонансной частоты ротора и нагрузки,
микрошаговый режим дает незначительные преимущества по сравнению с полу-
или полношаговым режимами. Причиной этого является фильтрующее действие
инерции ротора и нагрузки. Система с шаговым двигателем работает подобно
фильтру нижних частот. В микрошаговом режиме можно осуществлять только
разгон и торможение, а основное время работать в полношаговом режиме. К
тому же, для достижения высоких скоростей в микрошаговом режиме требуется
очень высокая частота повторения микрошагов, которую не всегда может
обеспечить управляющий микроконтроллер. Для предотвращения переходных
процессов и потери шагов, переключения режимов работы двигателя (из
микрошагового режима в полношаговый и т. п.) необходимо производить в те
п.) необходимо производить в те
моменты, когда ротор находится в положении, соответствующем одной
включенной фазе. Некоторые микросхемы драйверов микрошагового режима имеют
специальный сигнал, который информирует о таком положении ротора.
Например, это драйвер A3955 фирмы Allegro.
Во многих приложениях, где требуются малые относительные
перемещения и высокая разрешающая способность, микрошаговый режим способен
заменить механический редуктор. Часто простота системы является решающим
фактором, даже если при этом придется применить двигатель больших
габаритов. Несмотря на то, что драйвер, обеспечивающий микрошаговый режим,
намного сложнее обычного драйвера, всё равно система может оказаться более
простой и дешевой, чем шаговый двигатель, плюс редуктор. Современные
микроконтроллеры иногда имеют встроенные ЦАПы, которые можно использовать
для реализации микрошагового режима взамен специальных контроллеров. Это
позволяет сделать практически одинаковой стоимость оборудования для
полношагового и микрошагового режимов.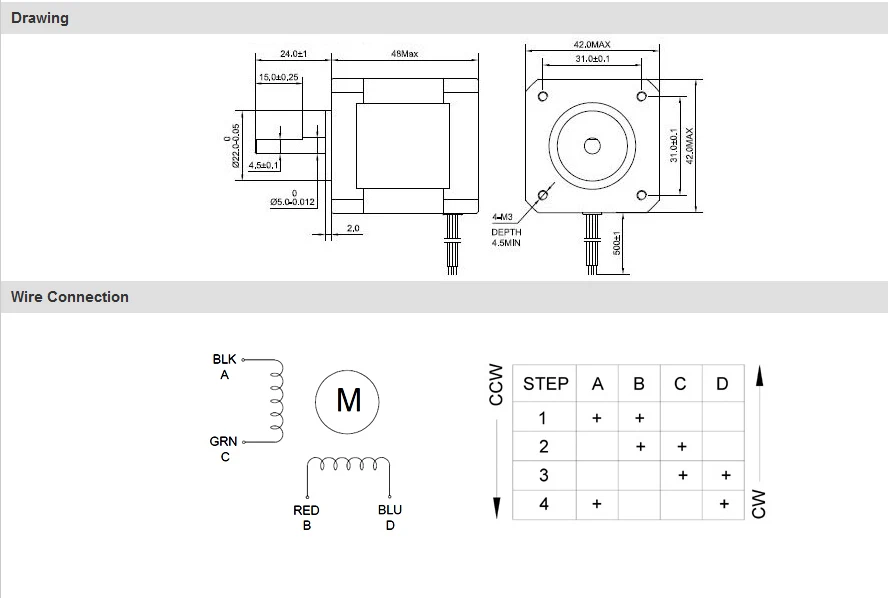
Иногда микрошаговый режим используется для увеличения
точности величины шага сверх заявленной производителем двигателя. При этом
используется номинальное число шагов. Для повышения точности используется
коррекция положения ротора в точках равновесия. Для этого сначала снимают
характеристику для конкретного двигателя, а затем, изменяя соотношение
токов в фазах, корректируют положение ротора индивидуально для каждого
шага. Такой метод требует предварительной калибровки и дополнительных
ресурсов управляющего микроконтроллера. Кроме того, требуется датчик
начального положения ротора для синхронизации его положения с таблицой
корректирующих коэффициентов.
На практике при осуществлении каждого шага
ротор не сразу останавливается в новом положении равновесия, а
осуществляет затухающие колебания вокруг положения равновесия. Время
установления зависит от характеристик нагрузки и от схемы драйвера. Во
многих приложениях такие колебания являются нежелательными. Избавиться от
Избавиться от
этого явления можно путем использования микрошагового режима. На рис. 13
показаны перемещения ротора при работе в полношаговом и микрошаговом
режимах.
Рис. 13. Перемещения ротора в полношаговом и микрошаговом режимах.
Видно, что в полношаговом режиме наблюдаются выбросы и
колебания, в то время как в микрошаговом режиме их нет. Однако и в этом
режиме график положения ротора отличается от прямой линии. Эта погрешность
объясняется погрешностью геометрии деталей двигателя и может быть
уменьшена путем проведения калибровки и последующей компенсации путем
корректировки токов фаз.
На практике существуют некоторые факторы,
ограничивающие точность работы привода в микрошаговом режиме. Некоторые из
них относятся к драйверу, а некоторые непосредственно к двигателю.
Обычно производители шаговых двигателей указывают такой
параметр, как точность шага.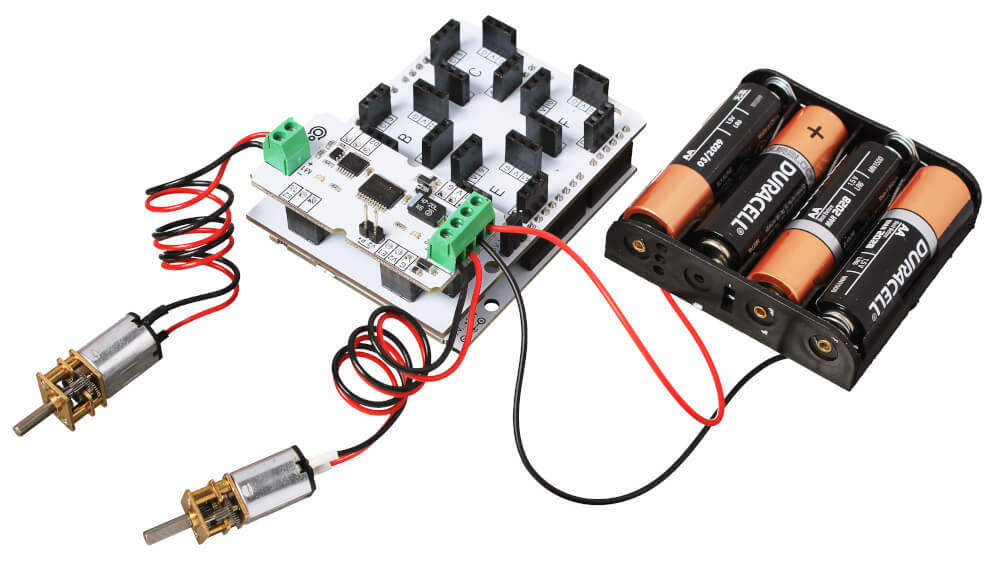 Точность шага указывается для положений
Точность шага указывается для положений
равновесия ротора при двух включенных фазах, токи которых равны. Это
соответствует полношаговому режиму с перекрытием фаз. Для микрошагового
режима, когда токи фаз не равны, никаких данных обычно не приводится.
Идеальный шаговый двигатель при питании фаз синусоидальным
и косинусоидальным током должен вращаться с постоянной скоростью. У
реального двигателя в таком режиме будут наблюдаться некоторые колебания
скорости. Связано это с нестабильностью воздушного зазора между полюсами
ротора и статора, наличием магнитного гистерезиса, что приводит к
погрешностям величины и направления магнитного поля и т.д. Поэтому
положения равновесия и момент имеют некоторые отклонения. Эти отклонения
зависят от погрешности формы зубцов ротора и статора и от примененного
материала магнитопроводов.
Конструкция некоторых двигателей оптимизирована для
наилучшей точности в полношаговом режиме и максимального момента
удержания. Специальная форма зубцов ротора и статора спроектирована так,
Специальная форма зубцов ротора и статора спроектирована так,
чтобы в положении равновесия для полношагового режима магнитный поток
сильно возростал. Это приводит к ухудшению точности в микрошаговом режиме.
Лучшие результаты позволяют получить двигатели, у которых момент удержания
в обесточенном состоянии меньше.
Отклонения можно разделить на два вида: отклонения
величины магнитного поля, которые приводят к отклонениям момента удержания
в микрошаговом режиме и отклонения направления магнитного поля, которые
приводят к отклонениям положения равновесия. Отклонения момента удержания
в микрошаговом режиме обычно составляют 10 — 30% от максимального момента.
Нужно сказать, что и в полношаговом режиме момент удержания может
колебаться на 10 — 20 % вследствие искажений геометрии ротора и статора.
Если измерить положения равновесия ротора при вращении
двигателя по и против часовой стрелки, то получатся несколько разные
результаты. Этот гистерезис связан в первую очередь с магнитным
Этот гистерезис связан в первую очередь с магнитным
гистерезисом материала сердечника, хотя свой вклад вносит и трение.
Магнитный гистерезис приводит к тому, что магнитный поток зависит не
только от тока обмоток, но и от предыдущего его значения. Погрешность,
создаваемая гистерезисом может быть равна нескольким микрошагам. Поэтому в
высокоточных приложениях при движении в одном из направлений нужно
проходить за желаемую позицию, а затем возвращаться назад, чтобы подход к
нужной позиции всегда осуществлялся в одном направлении.
Вполне естественно, что любое желаемое увеличение
разрешающей способности наталкивается на какие-то физические ограничения.
Не стоит думать, что точность позиционирования для 7.2 град. двигателя в
микрошаговом режиме не уступает точности 1.8 град. двигателя.
Препятствием являются следующие физические ограничения:
- нарастание момента в зависимости от угла поворота у 7.2
градусного двигателя в четыре раза более пологое, чем у настоящего
1. 8-градусного двигателя. Вследствие действия момента трения или момента
инерции нагрузки точность позиционирования уже будет хуже - как будет показано ниже, если в системе есть трение, то
вследствие появления мертвых зон точность позиционирования будет
ограничена - большинство коммерческих двигателей не обладают
прецизионной конструкцией и зависимость между моментом и углом поворота
ротора не является в точности синусоидальной. Вследствие этого
зависимость между фазой синусоидального тока питания и углом поворота
вала будет нелинейной. В результате ротор двигателя будет точно
проходить положения каждого шага и полушага, а между этими положениями
будут наблюдаться довольно значительные отклонения
 8-градусного двигателя. Вследствие действия момента трения или момента
8-градусного двигателя. Вследствие действия момента трения или момента
Эти проблемы наиболее ярко выражены для двигателей с
большим количеством полюсов. Существуют однако двигатели, ещё на этапе
разработки оптимизированные для работы в микрошаговом режиме. Полюса
Полюса
ротора и статора таких двигателей менее выражены благодаря скошенной форме
зубцов.
Еще один источник погрешностей позиционирования — это
ошибка квантования ЦАП, с помощью которого формируются токи фаз. Дело в
том, что ток должен формироваться по синусоидальному закону, поэтому для
минимизации погрешности линейный ЦАП должен иметь повышенную разрядность.
Существуют специализированные драйверы со встроенным нелинейным ЦАПом,
который позволяет сразу получать осчеты функции sin. Примером может
служить драйвер A3955 фирмы Allegro, который имеет встроенный 3-х
разрядный ЦАП, который обеспечивает следующие значения тока фаз: 100%,
92.4%, 83.1%, 70.7%, 55.5%, 38.2%, 19.5%, 0%. Это позволяет работать в
микрошаговом режиме с величиной шага 1/8, при этом погрешность установки
тока фаз не превышает 2%. Кроме того, этот драйвер имеет возможность
управлять скоростью спада тока обмоток двигателя во время работы, что
позволяет произвести драйвера под конкретный двигатель
для получения наименьшей погрешности позиционирования.
Даже если ЦАП точно сформировал синусоидальное опорное
напряжение, его нужно усилить и превратить в синусоидальный ток обмоток.
Многие драйверы имеют значительную нелинейность вблизи нулевого значения
тока, что вызывает значительные искажения формы и, как следствие,
значительные ошибки позиционирования. Если используются высококачественные
драйверы, например PBM3960 и PBL3771 фирмы Ericsson, погрешность,
связанная с драйвером исчезающе мала по сравнению с погрешностью
двигателя.
Иногда контроллеры шаговых двигателей позволяют
корректировать форму выходного сигнала путем добавления или вычитания из
синуса его третьей гармоники. Однако такая подстройка должна производится
индивидуально под конкретный двигатель, характеристики которого должны
быть перед этим измерены.
Из-за этих ограничений микрошаговый режим используется в
основном для обеспечения плавного вращения (особенно на очень низких
скоростях), для устранения шума и явления резонанса. Микрошаговый режим
Микрошаговый режим
также способен уменьшить время установления механической системы,
так как в отличие от полношагового режима отсутствуют выбросы и
осцилляции. Однако в большинстве случаев для обычных двигателей нельзя
гарантировать точного позицианирования в микрошаговом режиме.
Синусоидальный ток фаз может быть обеспечен применением
специальных драйверов. Некоторые из них, например A3955, A3957 фирмы
Allegro, уже содержат ЦАП и требуют о микроконтроллера только цифровых
кодов. Другие же, такие как L6506, L298 фирмы SGS-Thomson, требуют внешних
опорных напряжений синусоидальной формы, которые должен формировать
микроконтроллер с помощью ЦАПов. Нужно сказать, что слишком большое
количество дискретов синуса не приводит к повышению точности
позиционирования, так как начинает доминировать ошибка, связанная с
неидеальностью геометрии полюсов двигателя. Тем более, в этом случае
отсчеты должны следовать с большой частотой, что является проблемой при их
программном формировании. При работе на больших скоростях разрешающую
При работе на больших скоростях разрешающую
способность ЦАПов можно уменьшить. Более того, при очень больших скоростях
вообще рекомендуется работать в обычном полношаговом режиме, так как
управление гармоническим сигналом теряет преимущества. Происходит это по
той причине, что обмотки двигателя представляют собой индуктивность,
соответственно любая конкретная схема драйвера с конкретным напряжением
питания обеспечивает вполне определенную максимальную скорость нарастания
тока. Поэтому при повышении частоты форма тока начинает отклоняться от
синусоидальной и на очень больших частотах становится треугольной.
Зависимость момента от скорости, влияние нагрузки
Момент, создаваемый шаговым двигателем, зависит от нескольких факторов:
- скорости
- тока в обмотках
- схемы драйвера
На рис. 14а показана зависимость момента от угла поворота ротора.
Рис. 14. Возникновение мертвых зон в результате действия трения.
14. Возникновение мертвых зон в результате действия трения.
У идеального шагового двигателя эта зависимость
синусоидальная. Точки S являются положениями равновесия ротора для
негруженного двигателя и соответствуют нескольким последовательным шагам.
Если к валу двигателя приложить внешний момент, меньший момента удержания,
то угловое положение ротора изменится на некоторый угол Ф.
Ф = (N/(2*pi))*sin(Ta/Th),
где Ф — угловое смещение,
N — количество шагов
двигателя на оборот,
Ta — внешний приложенный момент,
Th —
момент удержания.
Угловое смещение Ф является ошибкой позиционирования
нагруженного двигателя. Если к валу двигателя приложить момент,
превышающий момент удержания, то под действием этого момента вал
провернется. В таком режиме положение ротора является неконтролируемым.
На практике всегда имеется приложенный к двигателю внешний момент,
хотя бы потому, что двигателю приходится преодолевать трение.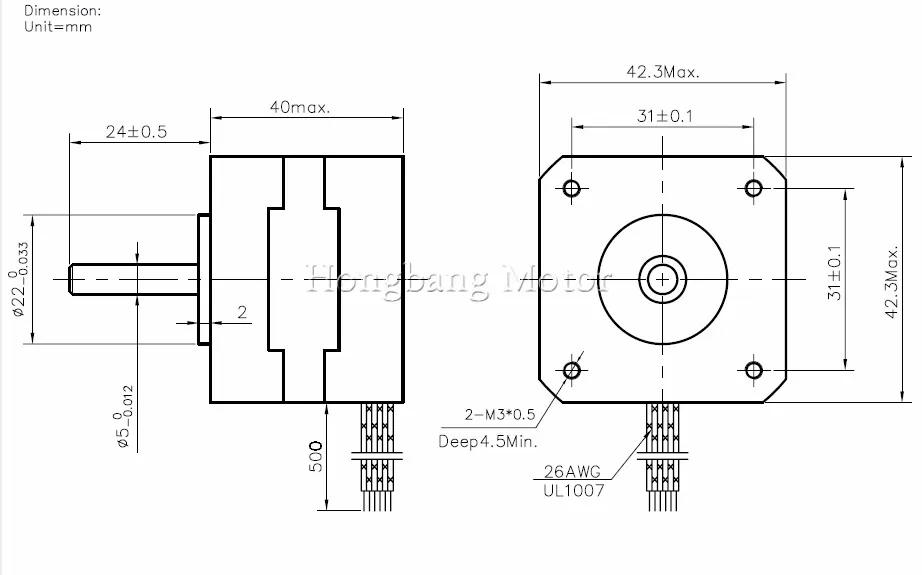 Силы трения
Силы трения
могут быть расделены на две категории: статическое трение или трение
покоя, для преодоления которого требуется постоянный момент и динамическое
трение или вязкое трение, которое зависит от скорости. Рассмотрим
статическое трение. Предположим, что для его преодоления требуется момент
в половину от пикового. На рис. 14а штриховыми линиями показан момент
трения. Таким образом, для вращения ротора остается только момент, лежащий
на графике за пределами штриховых линий. Отсюда следуют два вывода: трение
снижает момент на валу двигателя и появляются мертвые зоны вокруг каждого
положения равновесия ротора (рис. 14б):
d = 2 ( S / (pi/2) ) arcsin(T f /T h) = ( S / (pi/4) ) arcsin(T f / Th),
где d — ширина мертвой зоны в радианах,
S — угол шага в радианах,
Tf — момент трения,
Th — момент
удержания.
Мертвые зоны ограничивают точность позиционирования.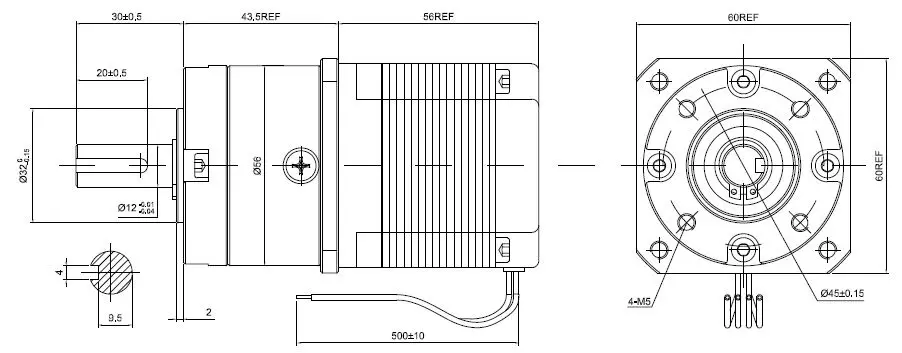
Например, наличие статического трения в половину от пикового момента
двигателя с шагом 90 град. вызовет наличие мертвых зон в 60 град. Это
означает, что шаг двигателя может колебаться от 30 до 150 град., в
зависимости от того, в какой точке мертвой зоны остановится ротор после
очередного шага.
Наличие мертвых зон является очень важным для
микрошагового режима. Если, например, имеются мертвые зоны величиной d, то
микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для
систем с использованием микрошагов очень важно минимизировать трение
покоя.
Когда двигатель работает под нагрузкой, всегда существует
некоторый сдвиг между угловым положением ротора и ориентацией магнитного
поля статора. Особенно неблагоприятной является ситуация, когда двигатель
начинает торможение и момент нагрузки реверсируется. Нужно отметить, что
запаздывание или опережение относится только к положению, но не к
скорости.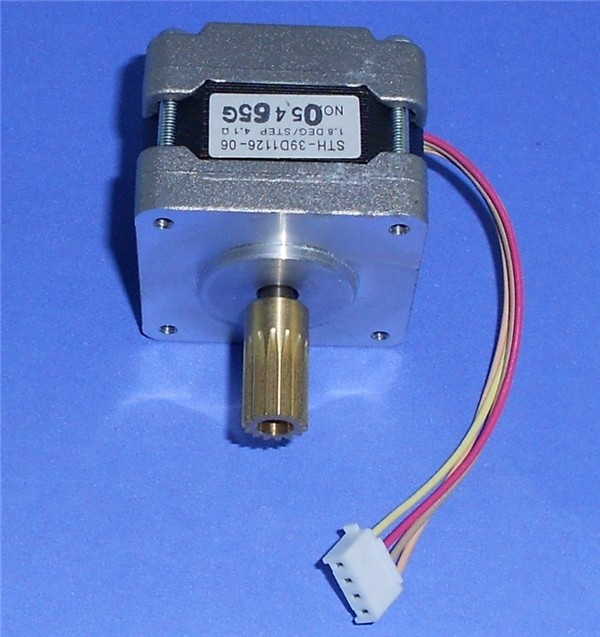 В любом случае, если синхронность работы двигателя не потеряна,
В любом случае, если синхронность работы двигателя не потеряна,
это запаздывание или опережение не может превышать величины двух полных
шагов. Это весьма приятный факт.
Каждый раз, когда шаговый двигатель
осуществляет шаг, ротор поворачивается на S радиан. При этом минимальный
момент имеет в место, когда ротор находится ровно между соседними
положениями равновесия (рис. 15).
Рис. 15. Момент удержания и рабочий момент шагового двигателя.
Этот момент называют рабочим моментом, он означает, какой
наибольший момент может преодолевать двигатель при вращении с малой
скоростью. При синусоидальной зависимости момента от угла поворота ротора,
этот момент Tr = Th/(20.5). Если двигатель делает шаг с двумя
запитанными обмотками, то рабочий момент равен моменту удержания для одной
запитанной обмотки.
Параметры привода на основе шагового двигателя сильно
зависят от характеристик нагрузки.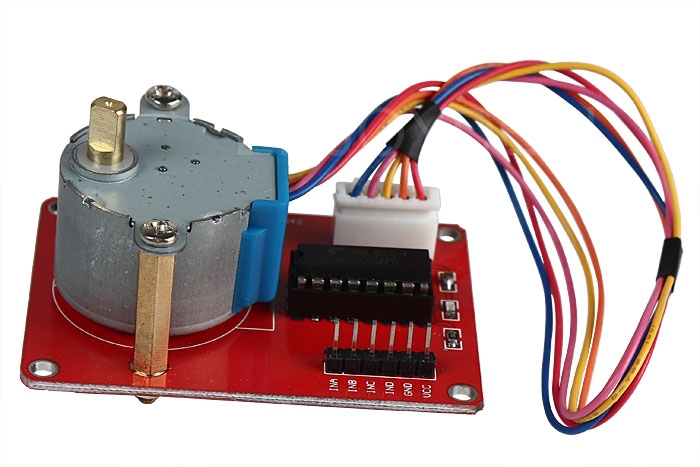 Кроме трения, реальная нагрузка
Кроме трения, реальная нагрузка
обладает инерцией. Инерция препятствует изменению скорости. Инерционная
нагрузка требует от двигателя больших моментов на разгоне и торможении,
ограничивая таким образом максимальное ускорение. С другой стороны,
увеличение инерционности нагрузки увеличивает стабильность скорости.
Такой параметр шагового двигателя, как
зависимость момента от скорости является важнейшим при выборе типа
двигателя, выборе метода управления фазами и выборе схемы драйвера. При
конструировании высокоскоростных драйверов шаговых двигателей нужно
учитывать, что обмотки двигателя представляют собой индуктивность. Эта
индуктивность определяет время нарастания и спада тока. Поэтому если к
обмотке приложено напряжение прямоугольной формы, форма тока не будет
прямоугольной. При низких скоростях (рис. 16а) время нарастания и спада
тока не способно сильно повлиять на момент, однако на высоких скоростях
момент падает. Связано это с тем, что на высоких скоростях ток в обмотках
Связано это с тем, что на высоких скоростях ток в обмотках
двигателя не успевает достигнуть номинального значения (рис. 16б).
Рис. 16. Форма тока в обмотках двигателя на разных скоростях работы.
Для того, чтобы момент падал как можно меньше, необходимо
обеспечить высокую скорость нарастания тока в обмотках двигателя, что
достигается применением специальных схем для их питания.
Поведение момента при увеличении частоты
коммутации фаз примерно таково: начиная с некоторой частоты среза момент
монотонно падает. Обычно для шагового двигателя приводятся две кривые
зависимости момента от скорости (рис. 17).
Рис. 17. Зависимость момента от скорости.
Внутренняя кривая (кривая старта, или pull-in curve)
показывает, при каком максимальном моменте трения для данной скорости
шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей
Эта кривая пересекает ось скоростей
в точке, называемой максимальной частотой старта или частотой
приемистости. Она определяет максимальную скорость, на которой
ненагруженный двигатель может тронуться. На практике эта величина лежит в
пределах 200 — 500 полных шагов в секунду. Инерционность нагрузки сильно
влияет на вид внутренней кривой. Большая инерционность соответствует
меньшей области под кривой. Эта область называется областью старта.
Внешняя кривая (кривая разгона, или pull-out curve) показывает, при каком
максимальном моменте трения для данной скорости шаговый двигатель способен
поддерживать вращение без пропуска шагов. Эта кривая пересекает ось
скоростей в точке, называемой максимальной частотой разгона. Она
показывает максимальную скорость для данного двигателя без нагрузки. При
измерении максимальной скорости нужно иметь в виду, что из-за явления
резонанса момент равен нулю еще и на резонансной частоте. Область, которая
Область, которая
лежит между кривыми, называется областью разгона.
Нужно отметить, что схема драйвера в значительной степени
влияет на ход кривой момент-скорость, но этот вопрос будет рассмотрен
ниже.
Разогнать!
Для того, чтобы работать на большой скорости из области
разгона (рис. 17), необходимо стартовать на низкой скорости из области
старта, а затем выполнить разгон. При остановке нужно действовать в
обратном порядке: сначала выполнить торможение, и только войдя в область
старта можно прекратить подачу управляющих импульсов. В противном случае
произойдет потеря синхронности и положение ротора будет утеряно.
Использование разгона и торможения позволяет достичь значительно больших
скоростей — в индустриальных применениях используются скорости до 10000
полных шагов в секунду. Необходимо отметить, что непрерывная работа
шагового двигателя на высокой скорости не всегда допустима ввиду нагрева
ротора.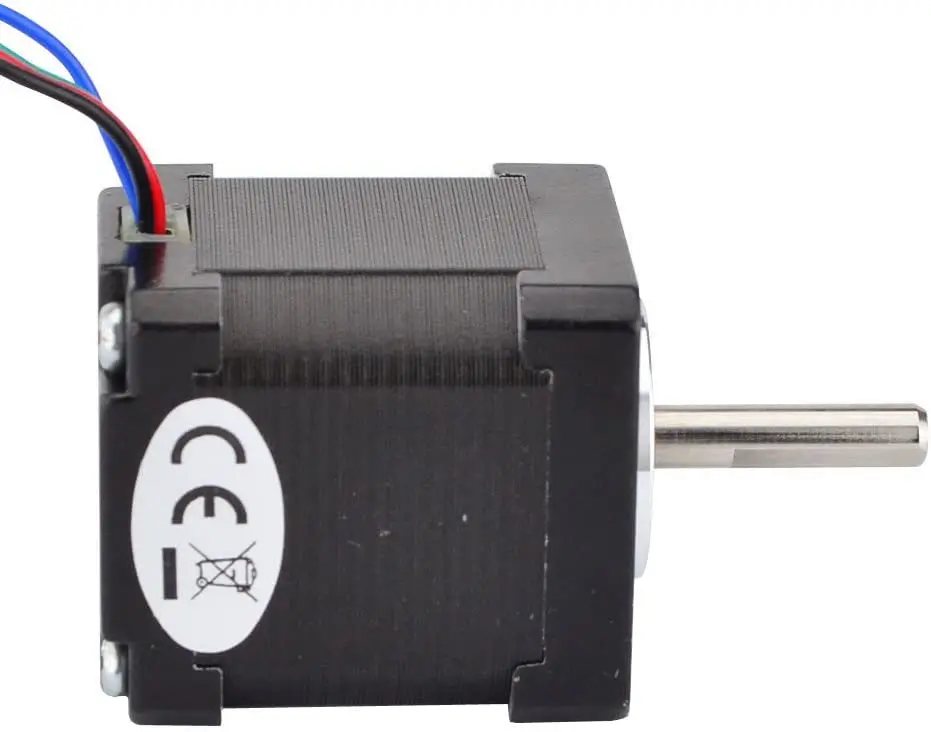 Однако высокая скорость кратковременно может быть использована при
Однако высокая скорость кратковременно может быть использована при
осуществлении позиционирования.
При разгоне двигатель проходит ряд скоростей, при этом на
одной из скоростей можно столкнуться с неприятным явлением резонанса. Для
нормального разгона желательно иметь нагрузку, момент инерции которой как
минимум равен моменту инерции ротора. На ненагруженном двигателе явление
резонанса проявляется наиболее сильно. Подробно методы борьбы с этим
явлением будут описаны ниже.
При осуществлении разгона или торможения
важно правильно выбрать закон изменения скорости и максимальное ускорение.
Ускорение должно быть тем меньше, чем выше инерционность нагрузки.
Критерий правильного выбора режима разгона — это осуществление разгона до
нужной скорости для конкретной нагрузки за минимальное время. На практике
чаще всего применяют разгон и торможение с постоянным ускорением.
Реализация закона, по которому будет производится
ускорение или торможение двигателя, обычно производится программно
управляющим микроконтроллером, так как именно микроконтроллер обычно
является источником тактовой частоты для драйвера шагового двигателя.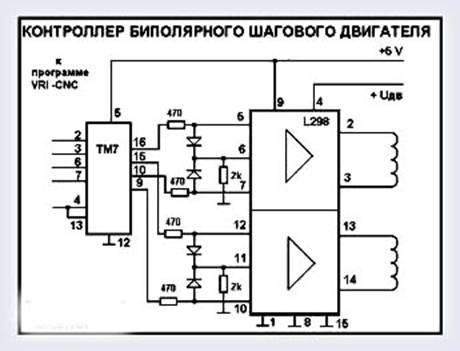 Хотя
Хотя
раньше для этих целей применялись управляемые напряжением генераторы или
пограммируемые делители частоты. Для генерации тактовой частоты удобно
использовать аппаратный таймер, который имеется в составе практически
любого микроконтроллера. Когда двигатель вращается с постоянной скоростью,
достаточно загрузить в таймер постоянное значение периода повторения шагов
(длительность шага). Если же двигатель разгоняется или тормозится, этот
период меняется с каждым новым шагом. При разгоне или торможении с
постоянным ускорением частота повторения шагов должна изменяться линейно,
соответствено значение периода, которое необходимо загружать в таймер,
должно меняться по гиперболическому закону.
Для наиболее общего случая требуется знать зависимость
длительности шага от текущей скорости. Количество шагов, которое
осуществляет двигатель при разгоне за время t равно:
N = 1/2At2+Vt, где N — число шагов, t — время,
V — скорость, выраженная в шагах в единицу времени, A — ускорение,
выраженное в шагах, деленных на время в квадрате.
Для одного шага N = 1, тогда длительность шага
t1 = T = (-V+(V2+2A)0.5)/A
В результате осуществления шага скорость становится равной
Vnew = (V2+2A)0.5
Вычисления по приведенным формулам довольно трудоемки и
требуют значительных затрат процессорного времени. В то же время, они
позволяют изменять значение ускорения в произвольный момент. Расчеты можно
существенно упростить, если потребовать постоянства ускорения во время
разгона и торможения. В этом случае можно записать зависимость
длительности шага от времени разгона:
V = V0+At, где V —
текущая скорость, V0 — начальная скорость (минимальная
скорость, с которой начинается разгон), A — ускорение;
1/T =
1/T0+At, где T — длительность шага, T0 — начальная
длительность шага, t — текущее время;
Откуда T = T0/(1+T0At)
Вычисления по этой формуле осуществить значительно проще,
однако для того, чтобы поменять значение ускорения, требуется остановить
двигатель.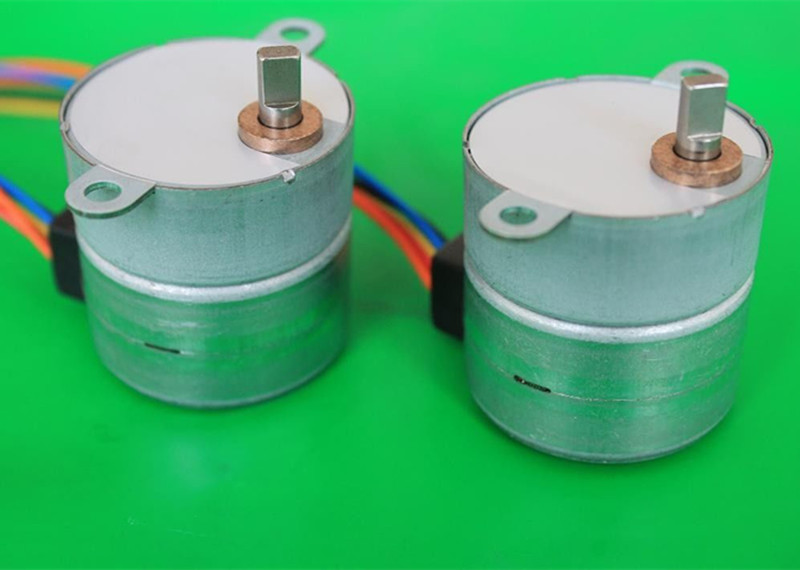
Резонанс
Шаговым двигателям свойственен нежелательный эффект,
называемый резонансом. Эффект проявляется в виде внезапного падения
момента на некоторых скоростях. Это может привести к пропуску шагов и
потере синхронности. Эффект проявляется в том случае, если частота шагов
совпадает с собственной резонансной частотой ротора двигателя.
Когда двигатель совершает шаг, ротор не сразу
устанавливается в новую позицию, а совершает затухающие колебания. Дело в
том, что систему ротор — магнитное поле — статор можно рассматривать как
пружинный маятник, частота колебаний которого зависит от момента инерции
ротора (плюс нагрузки) и величины магнитного поля. Ввиду сложной
конфигурации магнитного поля, резонансная частота ротора зависит от
амплитуды колебаний. При уменьшении амплитуды частота растет, приближаясь
к малоамплитудной частоте, которая более просто вычисляется количественно.
Эта частота зависит от угла шага и от отношения момента удержания к
моменту инерции ротора. Больший момент удержания и меньший момент инерции
Больший момент удержания и меньший момент инерции
приводят к увеличению резонансной частоты.
Резонансная частота
вычисляется по формуле:
F0 =
(N*TH/(JR+JL))0.5/4*pi,
где F0 — резонансная частота,
N — число
полных шагов на оборот,
TH — момент удержания для
используемого способа управления и тока фаз,
JR — момент
инерции ротора,
JL — момент инерции нагрузки.
Необходимо заметить, что резонансную частоту определяет
момент инерции собственно ротора двигателя плюс момент инерции нагрузки,
подключенной к валу двигателя. Поэтому резонансная частота ротора
ненагруженного двигателя, которая иногда приводится среди параметров,
имеет маленькую практическую ценность, так как любая нагрузка,
подсоединенная к двигателю, изменит эту частоту.
На практике эффект
резонанса приводит к трудностям при работе на частоте, близкой к
резонансной. Момент на частоте резонанса равен нулю и без принятия
специальных мер шаговый двигатель не может при разгоне пройти резонансную
частоту. В любом случае, явление резонанса способно существенно ухудшить
точностные характеристики привода.
В системах с низким демпфированием существует опасность
потери шагов или повышения шума, когда двигатель работает вблизи
резонансной частоты. В некоторых случаях проблемы могут возникать и на
гармониках частоты основного резонанса.
Когда используется не микрошаговый режим, основной
причиной появления колебаний является прерывистое вращение ротора. При
осуществлении шага ротору толчком сообщается некоторая энергия. Этот
толчок возбуждает колебания. Энергия, которая сообщается ротору в
полушаговом режиме, составляет около 30% от энергии полного шага. Поэтому
в полушаговом режиме амплитуда колебаний существенно меньше. В
В
микрошаговом режиме с шагом 1/32 основного при каждом микрошаге сообщается
всего около 0.1% от энергии полного шага. Поэтому в микрошаговом режиме
явление резонанса практически незаметно.
Для борьбы с резонансом можно использовать различные
методы. Например, применение эластичных материалов при выполнении
механических муфт связи с нагрузкой. Эластичный материал способствует
поглощению энергии в резонансной системе, что приводит к затуханию
паразитных колебаний. Другим способом является применение вязкого трения.
Выпускаются специальные демпферы, где внутри полого цилиндра, заполненного
вязкой кремнийорганической смазкой, может вращаться металлический диск.
При вращении этой системы с ускорением диск испытывает вязкое трение, что
эффективно демпфирует систему.
Существуют электрические методы борьбы с резонансом.
Колеблющийся ротор приводит к возникновению в обмотках статора ЭДС. Если
закоротить обмотки, которые на данном шаге не используются, это приведет к
демпфированию резонанса.
И, наконец, существуют методы борьбы с резонансом на
уровне алгоритма работы драйвера. Например, можно использовать тот факт,
что при работе с двумя включенными фазами резонансная частота примерно на
20% выше, чем с одной включенной фазой. Если резонансная частота точно
известна, то ее можно проходить, меняя режим работы.
Если это возможно, при старте и остановке нужно
использовать частоты выше резонансной. Увеличение момента инерции системы
ротор-нагрузка уменьшает резонансную частоту.
Однако, самой эффективной мерой для борьбы с резонансом
является применение микрошагового режима.
Чем же его кормить?
Для питания обычного двигателя постоянного тока требуется
лишь источник постоянного напряжения, а необходимые коммутации обмоток
выполняются коллектором. С шаговым двигателем всё сложнее. Все комутации
должен выполнять внешний контроллер. В настоящее время примерно в 95%
случаев для управления шаговыми двигателями используются микроконтроллеры.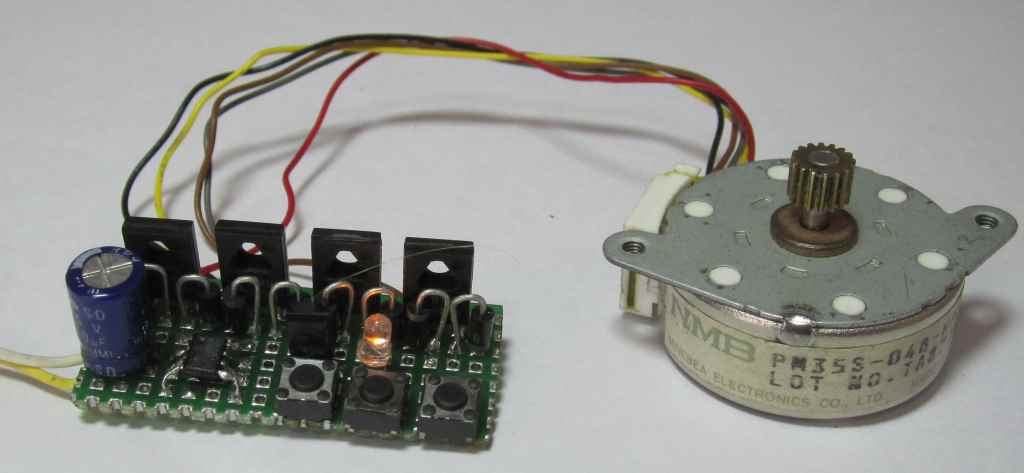
В простейшем случае для управления шаговым двигателем в полношаговом
режиме требуются всего два сигнала, сдвинутые по фазе на 90 градусов.
Направление вращения зависит от того, какая фаза опережает. Скорость
определяется часотой следования импульсов. В полушаговом режиме всё
несколько сложнее и требуется уже минимум 4 сигнала. Все сигналы
управления шаговым двигателем можно сформировать программно, однако это
вызовет большую загрузку микроконтроллера. Поэтому чаще применяют
специальные микросхемы драйверов шагового двигателя, которые уменьшают
количество требуемых от процессора динамических сигналов. Типично эти
микросхемы требуют тактовую частоту, которая является частотой повторения
шагов и статический сигнал, который задает направление. Иногда еще
присутствует сигнал включения полушагового режима. Для микросхем
драйверов, которые работают в микрошаговом режиме, требуется большее
количество сигналов. Распространенным является случай, когда необходимые
Распространенным является случай, когда необходимые
последовательности сигналов управления фазами формируются с помощью одной
микросхемы, а необходимые токи фаз обеспечивает другая микросхема. Хотя в
последнее время появляется все больше драйверов, реализующих все функции в
одной микросхеме.
Мощность, которая требуется от драйвера, зависит от
размеров двигателя и составляет доли ватта для маленьких двигателей
и до 10-20 ватт для больших двигателей. Максимальный уровень рассеиваемой
мощности ограничен нагревом двигателя. Максимальная рабочая температура
обычно указывается производителем, но можно приблизительно считать, что
нормальной является температура корпуса 90 градусов. Поэтому при
конструировании устройств с шаговыми двигателями, непрерывно работающими
на максимальном токе, необходимо принимать меры, исключающие касание
корпуса двигателя обслуживающим персоналом. В отдельных случаях возможно
применение охлаждающего радиатора. Иногда это позволяет применить
Иногда это позволяет применить
двигатель меньших размеров и добиться лучшего отношения
мощность/стоимость.
Для данного размера шагового двигателя место, занимаемое
обмотками, ограничено. Поэтому очень важно сконструировать драйвер так,
чтобы для данных параметров обмоток обеспечить наилучшую эффективность.
Схема драйвера должна выполнять три главных задачи:
- иметь возможность включать и выключать ток в обмотках, а также менять его направление
- поддерживать заданное значение тока
- обеспечивать как можно более быстрое нарастание и спад
тока для хороших скоростных характеристик
Способы изменения направления тока
При работе шагового двигателя требуется
изменение направления магнитного поля независимо для каждой фазы.
Изменение направления магнитного поля может быть выполнено разными
способами. В униполярных двигателях обмотки имеют отвод от середины или
имеются две отдельные обмотки для каждой фазы. Направление магнитного поля
Направление магнитного поля
меняется путем перключения половинок обмоток или целых обмоток. В этом
случае требуются только два простых ключа A и B для каждой фазы (рис. 18).
Рис. 18. Питание обмотки униполярного двигателя.
В биполярных двигателях направление меняется
путем переполюсовки выводов обмоток. Для такой переполюсовки требуется
полный H-мост (рис. 19). Управление ключами в том и другом случае должно
осуществляться логической схемой, реализующей нужный алгоритм работы.
Предпологается, что источник питания схем имеет номинальное для обмоток
двигателя напряжение.
Рис. 19. Питание обмотки биполярного двигателя.
Это простейший способ управления током обмоток, и как
будет показано в дальнейшем, он существенно ограничивает возможности
двигателя. Нужно отметить, что при раздельном управлении транзисторами
H-моста возможны ситуации, когда источник питания закорочен ключами.
Поэтому логическая схема управления должна быть построена таким образом,
чтобы исключить эту ситуацию даже в случае сбоев управляющего
микроконтроллера.
Обмотки двигателя представляют собой индуктивность, а это
значит, что ток не может бесконечно быстро нарастать или бесконечно быстро
спадать без привлечения бесконечной разности потенциалов. При подключении
обмотки к источнику питания ток будет с некоторой скоростью нарастать, а
при отключении обмотки произойдет выброс напряжения. Этот выброс способен
повредить ключи, в качестве которых используются биполярные или полевые
транзисторы. Для ограничения этого выброса устанавливают специальные
защитные цепочки. На схемах рис. 18 и 19 эти цепочки образованы диодами,
значительно реже применяют конденсаторы или их комбинацию с диодами.
Применение конденсаторов вызывает появление электрического резонанса, что
может вызвать увеличение момента на некоторой скорости. На рис. 18
На рис. 18
потребовалось 4 диода по той причине, что половинки обмоток униполярного
двигателя расположены на общем сердечнике и сильно связаны между собой.
Они работают как автотрансформатор и выбросы возникают на выводах обеих
обмоток. Если в качестве ключей применены МОП-транзисторы, то достаточно
только двух внешних диодов, так как у них внутри уже имеются диоды. В
интегральных микросхемах, содержащих мощные выходные каскады с открытым
коллектором, также часто имеются такие диоды. Кроме того, некоторые
микросхемы, такие как ULN2003, ULN2803 и подобные имеют внутри оба
защитных диода для каждого транзистора. Нужно отметить, что в случае
применения быстродействующих ключей требуются сравнимые по быстродействию
диоды. В случае применения медленных диодов требуется их шунтирование
небольшими конденсаторами.
Стабилизация тока
Для регулировки момента требуется регулировать силу тока в
обмотках. В любом случае, ток должен быть ограничен, чтобы не превысить
В любом случае, ток должен быть ограничен, чтобы не превысить
рассеиваимую мощность на омическом сопротивлении обмоток. Более того, в
полушаговом режиме ещё требуется в определенные моменты обеспечивать
нулевое значение тока в обмотках, а в микрошаговом режиме вообще требуется
задание разных значений тока.
Для каждого двигателя производителем
указывается номинальное рабочее напряжение обмоток. Поэтому простейший
способ питания обмоток — это использование источника постоянного
напряжения. В этом случае ток ограничен омическим сопротивлением обмоток и
напряжением источника питания (рис. 20а), поэтому такой способ питания
называют L/R-питанием. Ток в обмотке нарастает по экспоненциальному закону
со скоростью, определяемой индуктивностью, активным сопротивлением обмотки
и приложенным напряжением. При повышении частоты ток не достигает
номинального значения и момент падает. Поэтому такой способ питания
пригоден только при работе на малых скоростях и используется на практике
только для маломощных двигателей.
Рис. 20. Питание обмотки номинальным
напряжением (а) и использование ограничительного резистора (б).
При работе на больших скоростях требуется увеличивать
скорость нарастания тока в обмотках, что возможно путем повышения
напряжения источника питания. При этом максимальный ток обмотки должен
быть ограничен с помощью дополнительного резистора. Например, если
используется напряжение питание в 5 раз большее номинального, то требуется
такой дополнительный резистор, чтобы общее сопротивление составило 5R, где
R — омическое сопротивление обмотки (L/5R-питание). Этот способ питания
обеспечивает более быстрое нарастание тока и как следствие, больший момент
(рис. 20б). Однако он имеет существенный недостаток: на резисторе
рассеивается дополнительная мощность. Большие габариты мощных резисторов,
необходимость отвода тепла и повышенная необходимая мощность источника
питания — всё это делает такой метод неэффективным и ограничивает область
его применение небольшими двигателями мощностью 1 — 2 ватта. Нужно
Нужно
сказать, что до начала 80-х годов прошлого века параметры шаговых
двигателей, приводимые производителями, относились именно к такому способу
питания.
Еще более быстрое нарастание тока можно получить, если
использовать для питания двигателя генератор тока. Нарастание тока будет
происходить линейно, это позволит быстрее достигать номинального значения
тока. Тем более, что пара мощных резисторов может стоить дороже, чем пара
мощных транзисторов вместе с радиаторами. Но как и в предыдущем случае,
генератор тока будет рассеивать дополнительную мощность, что делает эту
схему питания неэффективной.
Существует еще одно решение, обеспечивающее
высокую скорость нарастания токи и низкую мощность потерь. Основано оно на
применении двух источников питания.
Рис. 21. Питание обмотки двигателя ступенчатым напряжением.
В начале каждого шага кратковременно обмотки подключаются
к более высоковольтному источнику, который обеспечивает быстрое нарастание
тока (рис. 21). Затем напряжение питания обмоток уменьшается (момент
21). Затем напряжение питания обмоток уменьшается (момент
времени t1 на рис. 21). Недостатком этого метода является
необходимость двух ключей, двух источников питания и более сложной схемы
управления. В системах, где такие источники уже есть, метод может
оказаться достаточно дешёвым. Еще одной трудностью является невозможность
определения момента времени t1 для общего случая. Для двигателя
с меньшей индуктивностью обмоток скорость нарастания тока выше и при
фиксированном t1 средний ток может оказаться выше номинального,
что чревато перегревом двигателя.
Еще одним методом стабилизации тока в обмотках двигателя
является ключевое (широтно-импульсное) регулирование. Современные драйверы
шаговых двигателей используют именно этот метод. Ключевой стабилизатор
обеспечивает высокую скорость нарастания тока в обмотках вместе с
простотой его регулирования и очень низкими потерями. Еще одним
преимуществом схемы с ключевой стабилизацией тока является и то, что она
поддерживает момент двигателя постоянным, независимо от колебаний
напряжения питания. Это позволяет использовать простые и дешевые
Это позволяет использовать простые и дешевые
нестабилизированные источники питания.
Для обеспечения высокой скорости нарастания
тока используют напряжение источника питания, в несколько раз превышающее
номинальное. Путем регулировки скважности импульсов, среднее напряжение и
ток поддерживаются на номинальном для обмотки уровне. Поддержание
производится в результате действия обратной связи. Последовательно с
обмоткой включается резистор — датчик тока R (рис. 22а). Падение
напряжения на этом резисторе пропорционально току в обмотке. Когда ток
достигает установленного значения, ключ выключается, что приводит к
падению тока. Когда ток спадает до нижнего порога, ключ снова включается.
Этот процесс повторяется периодически, поддерживая среднее значение тока
постоянным.
Рис. 22. Различные схемы ключевой стабилизации тока.
Управляя величиной Uref можно регулировать ток фазы,
например, увеличивать его при разгоне и торможении и снижать при работе на
постоянной скорости. Можно также задавать его с помощью ЦАП в форме
Можно также задавать его с помощью ЦАП в форме
синусоиды, реализуя таким образом микрошаговый режим. Такой способ
управления ключевым транзистором обеспечивает постоянную величину
пульсаций тока в обмотке, которая определяется гистерезисом компаратора.
Однако частота переключений будет зависеть от скорости изменения тока в
обмотке, в частности, от ее индуктивности и от напряжения питания. Кроме
того, две такие схемы, питающие разные фазы двигателя, не могут быть
засинхронизированы что может явится причиной дополнительных помех.
От указанных недостатков свободна схема с постоянной
частотой переключения (рис. 22б). Ключевым транзистором управляет триггер,
который устанавливается специальным генератором. Когда триггер
устанавливается, ключевой транзистор открывается и ток фазы начинает
расти. Вместе с ним растет и падение напряжения на датчике тока. Когда оно
достигает опорного напряжения, компаратор переключается, сбрасывая
триггер. Ключевой транзистор при этом выключается и ток фазы начинает
Ключевой транзистор при этом выключается и ток фазы начинает
спадать до тех пор, пока триггер не будет вновь установлен генератором.
Такая схема обеспечивает постоянную частоту коммутации, однако величина
пульсаций тока не будет постоянной. Частота генератора обычно выбирается
не менее 20кГц, чтобы двигатель не создавал слышимого звука. В то же время
слишком высокая частота переключений может вызвать повышенные потери в
сердечнике двигателя и потери на переключениях транзисторов. Хотя потери в
сердечнике с повышением частоты растут не так быстро ввиду уменьшения
амплитуды пульсаций тока с ростом частоты. Пульсации порядка 10% от
среднего значения тока обычно не вызывают проблем с потерями.
Подобная схема реализована внутри микросхемы
L297 фирмы SGS-Thomson, применение которой сводит к минимуму количество
внешних компонентов. Ключевое регулирование реализуют и другие
специализированные микросхемы.
Рис. 23. Форма тока в обмотках двигателя для различных способов питания.
23. Форма тока в обмотках двигателя для различных способов питания.
На рис. 23 показана форма тока в обмотках двигателя для
трех способов питания. Наилучшим в смысле момента является ключевой метод.
К тому же он обеспечивает высокий КПД и позволяет просто регулировать
величину тока.
Быстрый и медленный спад тока
На рис. 19 были показаны конфигурации ключей в
H-мосту для включения разных направлений тока в обмотке. Для выключения
тока можно выключить все ключи H-моста или же оставить один ключ
включенным (рис. 24). Эти две ситуации различаются по скорости спада тока
в обмотке. После отключения индуктивности от источника питания ток не
может мгновено прекратится. Возникает ЭДС самоиндукции, имеющая
противоположное источнику питания направление. При использовании
транзисторов в качестве ключей необходимо использовать шунтирующие диоды,
чтобы обеспечить проводимость в обе стороны. Скорость изменения тока в
индуктивности пропорциональна приложенному напряжению. Это справедливо как
Это справедливо как
для нарастания тока, так и для его спада. Только в первом случае
источником энергии является источник питания, а во втором сама
индуктивность отдает запасенную энергию. Этот процесс может происходить
при разных условиях.
Рис. 24. Медленный и быстрый спад тока.
На рис. 24а показано состояние ключей H-моста, когда
обмотка включена. Включены ключи A и D, направление тока показано
стрелкой. На рис. 24б обмотка выключена, но ключ A включен. ЭДС
самоиндукции закорачивается через этот ключ и диод VD3. В это время на
выводах обмотки будет небольшое напряжение, равное прямому падению на
диоде плюс падение на ключе (напряжение насыщения транзистора). Так как
напряжение на выводах обмотки мало, малой будет и скорость изменения тока.
Соответственно малой будет и скорость спадания магнитного поля. А это
значит, еще некоторое время статор двигателя будет создавать магнитное
поле, которого в это время быть не должно. На вращающийся ротор это поле
На вращающийся ротор это поле
будет оказывать тормозящее воздействие. При высоких скоростях работы
двигателя этот эффект может серъезно помешать нормальной работе двигателя.
Быстрое спадание тока при выключении является очень важным для
высокоскоростных контроллеров, работающих в полушаговом режиме.
Возможен и другой способ отключения тока обмотки, когда
размыкаются все ключи H-моста (рис 24в). При этом ЭДС самоиндукции
закорачивается чрез диоды VD2, VD3 на источник питания. Это значит, что во
время спада тока на обмотке будет напряжение, равное сумме напряжения
источника питания и прямого падения на двух диодах. По сравнению с первым
случаем, это значительно большее напряжение. Соответственно, более быстрым
будет спад тока и магнитного поля. Такое решение, использующее напряжение
источника питания для ускорения спада тока является наиболее простым, но
не единственным. Нужно сказать, что в ряде случаев на источнике питания
могут появится выбросы, для подавления которых понадобятся специальные
демферные цепочки. Безразлично, каким способом обеспечивается на обмотке
Безразлично, каким способом обеспечивается на обмотке
повышенное напряжение во время спада тока. Для этого можно применить
стабилитроны или варисторы. Однако на этих элементах будет рассеиваться
дополнительная мощность, которая в первом случае отдавалась обратно в
источник питания.
Для униполярного двигателя ситуация более
сложная. Дело в том, что половинки обмотки, или две отдельных обмотки
одной фазы сильно связаны между собой. В результате этой связи на
закрывающемся транзисторе будут иметь место выбросы повышенной амплитуды.
Поэтому транзисторы должны быть защищены специальными цепочками. Эти
цепочки для обеспечения быстрого спада тока должны обеспечивать довольно
высокое напряжение ограничения. Чаще всего применяются диоды вместе со
стабилитронами или варисторы. Один из способов схемотехнической реализации
показан на рис. 25.
Рис. 25. Пример реализации быстрого спада тока для униполярного двигателя.
При ключевом регулировании величина пульсаций тока зависит
от скорости его спада. Здесь возможны разные вырианты.
Если обеспечить закорачивание обмотки диодом, будет
реализован медленный спад тока. Это приводит к уменьшению амплитуды
пульсаций тока, что является весьма желательным, особенно при работе
двигателя в микрошаговом режиме. Для данного уровня пульсаций медленный
спад тока позволяет работать на более низких частотах ШИМ, что уменьшает
нагрев двигателя. По этим причинам медленный спад тока широко
используется. Однако существует несколько причин, по которым медленное
нарастание тока не всегда является оптимальным: во-первых, из-за
отрицательной обратной ЭДС, ввиду малого напряжения на обмотке во время
спада тока, реальный средний ток обмотки может оказаться завышенным;
во-вторых, когда требуется резко уменьшить ток фазы (например, в
полушаговом режиме), медленный спад не позволит сделать это быстро;
в-третьих, когда требуется установить очень низкое значение тока фазы,
регулирование может нарушится ввиду существования ограничения на
минимальное время включенного состояния ключей.
Высокая скорость спада тока, которая реализуется путем
замыкания обмотки на источник питания, приводит к повышенным пульсациям.
Вместе с тем, устраняются недостатки, свойственные медленному спаду тока.
Однако при этом точность поддержания среднего тока меньше, также больше
потери.
Наиболее совершенные микросхемы драйверов имеют
возможность регулировать скорость спада тока.
| Применение шаговых двигателей Биполярные и униполярные шаговые двигатели Шаговые двигатели с постоянными магнитами Гибридные шаговые двигатели |
Виды шаговых двигателей Управление фазами шаговых двигателей Двигатели с переменным магнитным сопротивлением |
Шаговые двигатели
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Выбор контроллера для управления шаговым двигателем описан в статье Контроллеры ШД. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит.
В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов.
К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов.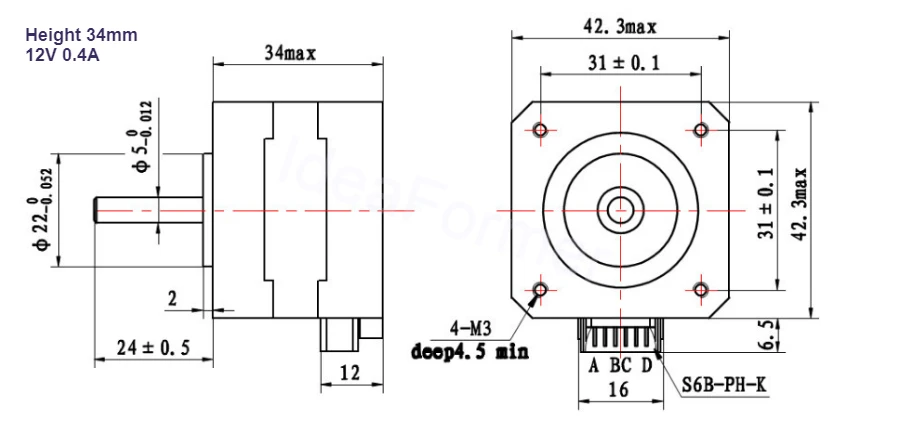 Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей:
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами
· гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки.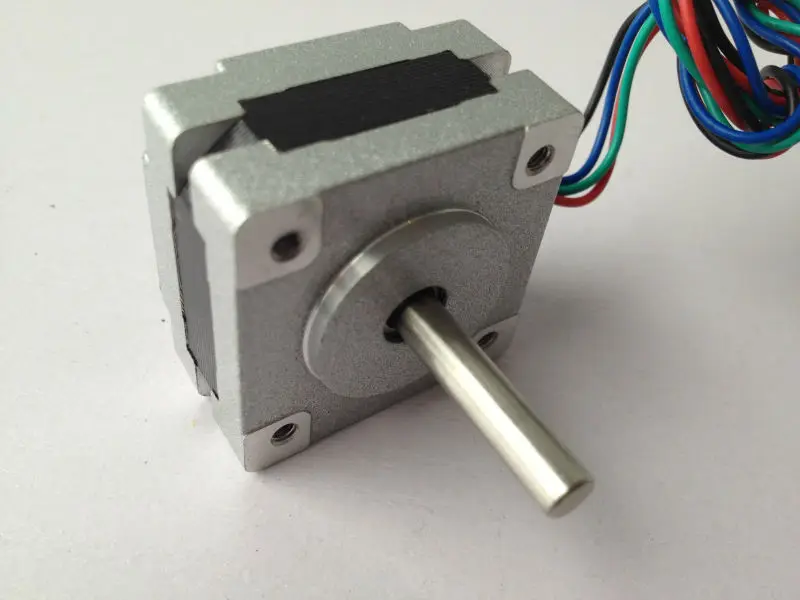 При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др.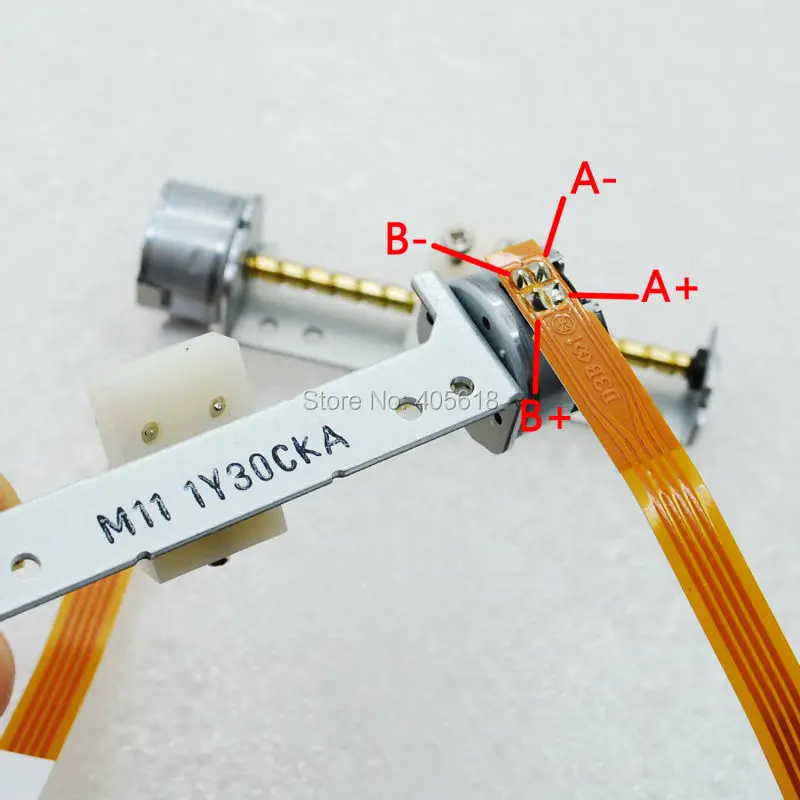 — в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
— в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т. е.
е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0. 707 * Iуниполяр.
707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0. 5 R).
5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
При выборе шагового двигателя одной из важнейших характеристик является его скоростные качества, то есть зависимость момента на валу от скорости вращения. Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение R/L тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента. Объясняется это тем, что эквивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление, возникающая в цепи ЭДС самоиндукции препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи. Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение R/L тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента. Объясняется это тем, что эквивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление, возникающая в цепи ЭДС самоиндукции препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи. Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
Интернет магазин чпу станков хобби класса и комплектации
Подбор и расчет шаговых двигателей для ЧПУ
08.04.2022
При выборе качественного шагового мотора, имеющего усложненную систему управления, учитывается индуктивные параметры обмотки и уровень напряжения на питающем драйвер источнике. Выбрать его не составит труда, если знать область использования устройства, а также необходимые технические показатели.
Рекомендуется заранее изучить ключевые параметры подбора шагового двигателя для ЧПУ и наиболее известные модификации используемых моторов. Представленная ниже информация позволит разобраться во всем этом.
Особенности выбора шагового двигателя для ЧПУ
Подбор осуществляется исходя из конструкции устройства: характеристик подвижной и неподвижной частей, соответственно, ротора и статора. Можно выделить три основных критерия. Правила подбора мотора, которых рекомендует придерживаться профессионалы:
- Индуктивность. За основу берется показатель индуктивности обмотки. Изначально вычисляется квадратный корень величины, сформированный показатель умножается на 32. Для оценки необходимо знать напряжение на источнике питания. Расчетное значение индуктивности не должно чрезмерно отличаться от него. В случае превышения значения более чем на 30%, двигатель будет работать слишком интенсивно (перегреется, увеличится шумность). Если расчетное значение меньше чем на 30%, соотношение крутящего момента и скорости будет несоразмерным, что также скажется на итоговом качестве работы. Ток, протекая через обмотку, определяет движение ротора, задает крутящий момент, значительно влияет на его равномерность.
- Влияние скорости тока на крутящий момент. Требуется предварительно построить достоверный график для оценки технических свойств двигателя и его соответствия нужным условиям технического задания.
- Размерные характеристики применяемого мотора: главные показатели, особенности используемых фланцев и вала.
 За основу берется показатель индуктивности обмотки. Изначально вычисляется квадратный корень величины, сформированный показатель умножается на 32. Для оценки необходимо знать напряжение на источнике питания. Расчетное значение индуктивности не должно чрезмерно отличаться от него. В случае превышения значения более чем на 30%, двигатель будет работать слишком интенсивно (перегреется, увеличится шумность). Если расчетное значение меньше чем на 30%, соотношение крутящего момента и скорости будет несоразмерным, что также скажется на итоговом качестве работы. Ток, протекая через обмотку, определяет движение ротора, задает крутящий момент, значительно влияет на его равномерность.
За основу берется показатель индуктивности обмотки. Изначально вычисляется квадратный корень величины, сформированный показатель умножается на 32. Для оценки необходимо знать напряжение на источнике питания. Расчетное значение индуктивности не должно чрезмерно отличаться от него. В случае превышения значения более чем на 30%, двигатель будет работать слишком интенсивно (перегреется, увеличится шумность). Если расчетное значение меньше чем на 30%, соотношение крутящего момента и скорости будет несоразмерным, что также скажется на итоговом качестве работы. Ток, протекая через обмотку, определяет движение ротора, задает крутящий момент, значительно влияет на его равномерность.

Существуют и другие параметры, которые следует учесть при покупке шагового двигателя для использования в составе числового ПУ. К ним относится уровень сопротивления, ток в фазе, инерция, статический синхронизирующий момент и пр.
Каким бывает двигатель? Основные типы
При подборе в обязательном порядке нужно определиться с видом шагового мотора для станка с ЧПУ. Независимо от его предназначения (для бытового или промышленного использования), различают шаговые агрегаты биполярного, униполярного и трехфазного типа. У каждого из этих вариантов присутствуют свои ключевые свойства. Нужно изучить их более подробно:
- Биполярные. Считаются наиболее популярными. Процесс выбора нового драйвера при поломке предельно простой, на низких оборотах отслеживается завышенный уровень удельного сопротивления.
- Трёхфазные. Незаменимы на производственных участках, где скорость вращения мотора должна быть как можно выше.
- Униполярные. Это своеобразные биполярные двигатели с разными вариациями подключения обмоток.
 Это своеобразные биполярные двигатели с разными вариациями подключения обмоток.
Это своеобразные биполярные двигатели с разными вариациями подключения обмоток.
Важно знать! Изучите внимательно предлагаемые производителем станки, которые аналогичны по основным характеристикам вашему изделию и подберите на основе этого анализа двигатель. Он будет соответствовать все заявленным вами требованиям.
Как быстро рассчитываются нужные показатели шаговых двигателей для ЧПУ?
Сила, действующая в системе
Первоначально вычисляем силу трения при использовании направляющих. Ее величина будет зависеть от типа взятых за основу материалов. К примеру, коэффициент трения равен 0,2 (обозначим величину «КТ»), масса детали и стола 300/100 кгс соответственно («М1» и «М2»), режущая сила – 3000 Н («Фр»), ускорение –2 м/с2 («А»).
- Расчет силы трения Ф1 будет выглядеть как действие: Кт х 9,81(М1+М2)=785 Н.
- Расчет уровня инерции Ф2: (М1+М2)А=800Н.
- Определение полной силы сопротивления: Ф1+Ф2+Фр=4 585 Н.

Берем на заметку: силу сопротивления развивает только привод стола на гайке шариковой винтовой передачи.
Как рассчитать мощность?
Необходимо обязательно помнить об инерции вала мотора и иных частей, совершающих вращение. Указанные ниже формулы эти моменты не учитывают. Чтобы расчет получился достаточно точным, нужно изменить величину ускорения (в большую/меньшую сторону) на 10%.
Мощность мотора определяется с использованием известной формулы, когда сила есть как произведение массы на ускорение: F=ma (Н). Таким образом, мощность есть произведение силы относительно скорости.
Если необходимо автоматически рассчитать мощность, можно воспользоваться специальными калькуляторами. Найти их в общей сети не составит особого труда.
Как рассчитать редукцию оборотов?
Для определения точных показателей потребуется воспользоваться величинами: номинальный уровень оборотов сервопривода и максимально возможная скорость движения стола. Для примера воспользуемся следующими значениями:
- скорость – 1000 миллиметров за мин.
- шаг винта — 10 миллиметров.

По итогу скоростной режим вращения будет составлять: 1000/10=100 об/мин.
Коэффициент редукции определяется с учетом номинального уровня оборотов сервопривода. Разделив это значение на скоростной режим вращения винта, получается требуемый коэффициент.
Шаговые двигатели для ЧПУ. Какие пользуются популярностью?
Модификации советского производства
В конструкции станков нередко присутствуют индукционные шаговые моторы. Такие двигатели разработаны во времена СССР. Примеры моделей и основные технические параметры:
Выбирая такие изделия, в первую очередь нужно узнать о присутствии индекса «ОС». Такая уникальная серия указывает на военную приемку, исполнена максимально качественно, если сравнивать с обычными вариантами.
Модификации китайского производства
Несколько примеров таких шаговых моторов для числового программного управления и характеристики описаны в таблице:
Модели шаговых двигателей (биполярных), созданных под контролем CNC Technology:
Тщательно изучив критерии выбора перед покупкой, ориентируясь в предложениях на рынке, вы запросто подберете нужную модель.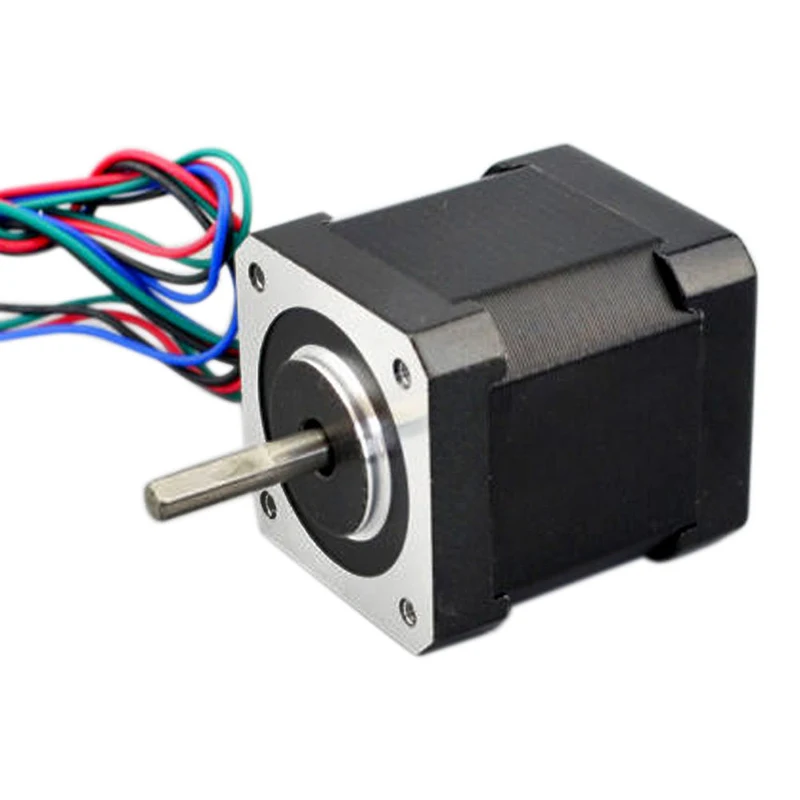 Отдавайте предпочтение только проверенным поставщикам.
Отдавайте предпочтение только проверенным поставщикам.
типов степперов | Все о шаговых двигателях
Типы степперов
Сохранить
Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Существует множество типов шаговых двигателей, некоторые
из которых требуют очень специализированных водителей.
Для наших целей мы сосредоточимся на шаговых двигателях, которые можно
управляется общедоступными драйверами.
Это: шаговые двигатели с постоянными магнитами или гибридные, двухфазные биполярные или четырехфазные однополярные.
В первую очередь необходимо учитывать работу, которую должен выполнять двигатель. Как и следовало ожидать, более крупные двигатели способны развивать большую мощность. Размер шаговых двигателей варьируется от размера арахиса до огромных монстров NEMA 57.
Большинство двигателей имеют номинальный крутящий момент. Это то, на что вам нужно обратить внимание, чтобы решить, достаточно ли у двигателя силы, чтобы делать то, что вы хотите.
NEMA 17 — это стандартный размер, используемый в 3D-принтерах и небольших станках с ЧПУ. Меньшие двигатели находят применение во многих робототехнических и аниматронных приложениях. Более крупные рамы NEMA распространены в станках с ЧПУ и в промышленных приложениях.
Номера NEMA определяют стандартные размеры лицевой панели для монтажа двигателя. Они не определяют другие характеристики двигателя. Два разных двигателя NEMA 17 могут иметь совершенно разные электрические или механические характеристики и не обязательно являются взаимозаменяемыми.
Следующее, на что следует обратить внимание, это требуемое разрешение позиционирования. Количество шагов на оборот варьируется от 4 до 400. Обычно доступны 24, 48 и 200 шагов.
Разрешение часто выражается в градусах на шаг.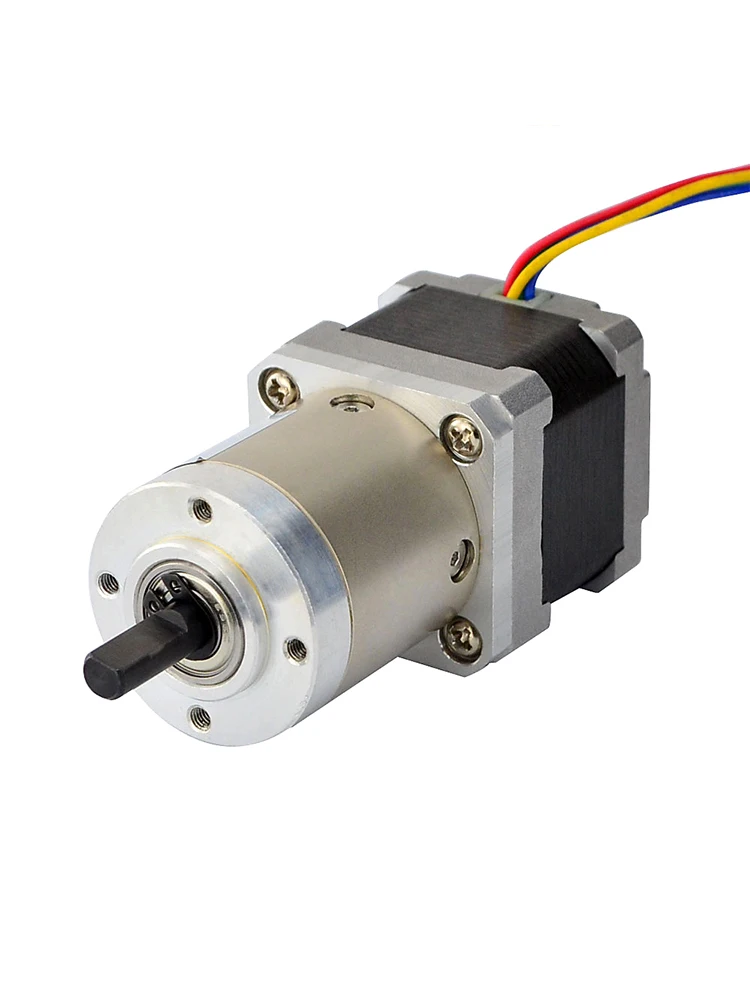 Двигатель 1,8 ° такой же, как двигатель 200 шагов / оборотов.
Двигатель 1,8 ° такой же, как двигатель 200 шагов / оборотов.
Платой за высокое разрешение является скорость и крутящий момент. Двигатели с большим числом шагов работают на более низких оборотах, чем двигатели аналогичного размера. А более высокая частота шагов, необходимая для вращения этих двигателей, приводит к более низкому крутящему моменту, чем двигатель аналогичного размера с малым числом шагов при аналогичных скоростях.
Еще одним способом достижения высокого разрешения позиционирования является передача. Зубчатая передача 32: 1, подаваемая на выход двигателя с 8 шагами / оборотами, приведет к двигателю с 256 шагами.
Зубчатая передача также увеличивает крутящий момент двигателя. Некоторые крошечные шаговые двигатели с редуктором способны развивать впечатляющий крутящий момент. Но компромисс, конечно, скорость. Редукторные шаговые двигатели обычно ограничиваются приложениями с низкими оборотами.
Люфт — еще одна проблема мотор-редукторов. Когда двигатель меняет направление, он должен компенсировать любую слабину, которая может быть в зубчатой передаче. Это может повлиять на точность позиционирования.
Это может повлиять на точность позиционирования.
Еще одна вещь, которую следует учитывать, — это то, как двигатель будет взаимодействовать с остальной системой привода. Доступны двигатели с различными типами валов:
- Круглый или D-образный вал : Они доступны в различных стандартных диаметрах, и существует множество шкивов, шестерен и муфт валов, разработанных для соответствия. Валы «D» имеют одну плоскую сторону, чтобы предотвратить проскальзывание. Это желательно, когда задействованы высокие крутящие моменты.
- Вал-шестерня : На некоторых валах прямо врезаны зубья шестерни. Обычно они предназначены для сопряжения с модульными зубчатыми передачами.
- Вал ходового винта : Двигатели с валом ходового винта используются для создания линейных приводов. Их миниатюрные версии можно найти в качестве позиционеров головок во многих дисководах.
Существует множество вариантов подключения шагового двигателя.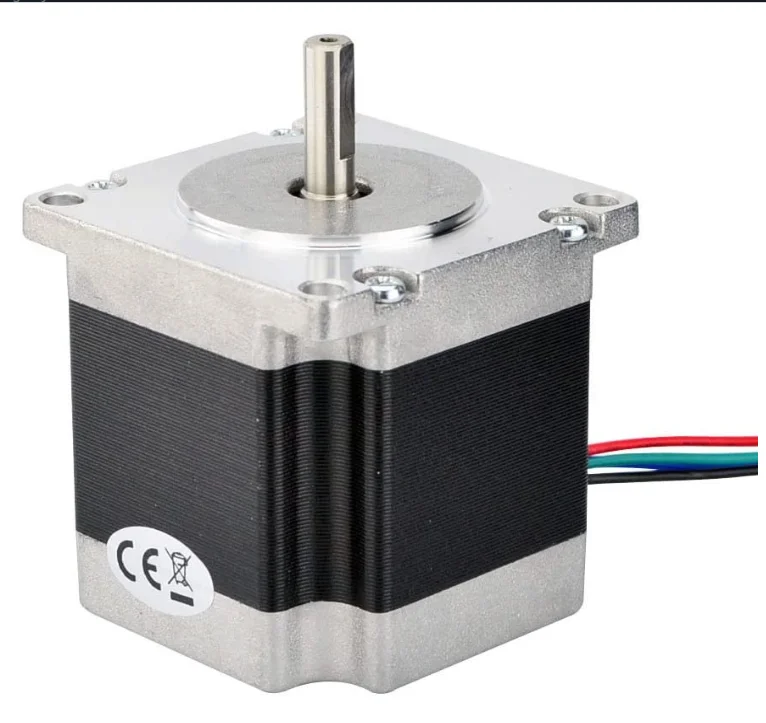 Для наших целей мы сосредоточимся на шаговых двигателях, которыми можно управлять с помощью общедоступных драйверов. Это шаговые двигатели с постоянными магнитами или гибридные, подключенные как 2-фазные биполярные или 4-фазные униполярные.
Для наших целей мы сосредоточимся на шаговых двигателях, которыми можно управлять с помощью общедоступных драйверов. Это шаговые двигатели с постоянными магнитами или гибридные, подключенные как 2-фазные биполярные или 4-фазные униполярные.
Шаговый двигатель может иметь любое количество катушек. Но они соединены в группы, называемые «фазами». Все катушки в фазе находятся под напряжением вместе.
Униполярные драйверы всегда подают питание на фазы одинаковым образом. Одно отведение, «общее» отведение, всегда будет отрицательным. Другой вывод всегда будет положительным. Униполярные драйверы могут быть реализованы с помощью простой транзисторной схемы. Недостатком является то, что доступный крутящий момент меньше, потому что только половина катушек может быть запитана одновременно.
Драйверы Bipolar используют схему H-моста, чтобы фактически изменить направление тока, протекающего по фазам. При подаче питания на фазы с чередованием полярности все катушки можно заставить работать, вращая двигатель.
При подаче питания на фазы с чередованием полярности все катушки можно заставить работать, вращая двигатель.
Двухфазный биполярный двигатель имеет 2 группы катушек. Четырехфазный униполярный двигатель имеет 4 провода. Двухфазный двухполярный двигатель будет иметь 4 провода — по 2 на каждую фазу. Некоторые двигатели поставляются с гибкой проводкой, которая позволяет использовать двигатель как биполярный, так и униполярный.
5-проводной двигатель
Этот тип распространен в небольших униполярных двигателях. Все общие провода катушки связаны внутри и выведены как 5-й провод. Этот двигатель может работать только как униполярный двигатель.
6-проводной двигатель
Этот двигатель подключается только к общим проводам двух парных фаз. Эти два провода можно соединить для создания 5-проводного униполярного двигателя.
Или вы можете просто игнорировать их и относиться к этому как к биполярному двигателю!
8-проводной двигатель
8-проводной униполярный двигатель является наиболее универсальным двигателем из всех. Его можно вести несколькими способами:
Его можно вести несколькими способами:
- 4-х фазный однополюсный — Все общие провода соединены вместе — как у 5-ти проводного двигателя.
- 2-фазный последовательный биполярный — Фазы соединены последовательно — так же, как 6-проводной двигатель.
- 2-фазный параллельный биполярный — Фазы соединены параллельно. Это приводит к уменьшению сопротивления и индуктивности в два раза, но требует удвоения тока для возбуждения. Преимуществом такой проводки является более высокий крутящий момент и максимальная скорость.
Что такое шаговый двигатель?
Управление шаговым двигателем
Это руководство было впервые опубликовано 05 мая 2014 г. Оно было последним
обновлено 05 мая 2014 г.
Эта страница (Типы степперов) последний раз обновлялась 20 сентября 2022 г.
Текстовый редактор на базе tinymce.
Биполярный шаговый двигатель
: что это такое? (Схема и последовательность)
от Electrical4U
Содержание
Что такое биполярный шаговый двигатель?
Шаговый двигатель — это бесщеточный двигатель постоянного тока, который делит полный оборот на несколько равных шагов. Затем положение двигателя может быть направлено на перемещение и удержание на одном из этих шагов без какого-либо датчика положения для обратной связи (контроллер с разомкнутым контуром). Биполярные шаговые двигатели представляют собой тип шагового двигателя с одной обмоткой на фазу и без центрального отвода (в отличие от униполярного шагового двигателя).
Постоянный ток в обмотке необходимо изменить на противоположный, чтобы изменить магнитный полюс и обеспечить работу двигателя. Поскольку в биполярном шаговом двигателе нет центрального отвода, схема управления должна быть более сложной. Обычно используется H-мост.
Шаговые двигатели доступны в трех основных конфигурациях:
- Универсальный шаговый двигатель — универсальный шаговый двигатель можно подключить как биполярный или униполярный шаговый двигатель.
- Униполярный шаговый двигатель — Униполярный шаговый двигатель может использоваться как униполярный или биполярный шаговый двигатель.
- Биполярный шаговый двигатель. Биполярный шаговый двигатель можно использовать только как биполярный.

Основы биполярного шагового двигателя
A Биполярный шаговый двигатель имеет одну обмотку на фазу статора. Двухфазный биполярный шаговый двигатель будет иметь 4 вывода. В биполярном шаговом двигателе нет общего провода, как в униполярном шаговом двигателе.
Следовательно, нет естественного изменения направления тока в обмотке.
Биполярный шаговый двигатель имеет простую схему подключения, но его работа несложна. Чтобы управлять биполярным шаговым двигателем, нам нужна микросхема драйвера с внутренней мостовой схемой H.
Это связано с тем, что для изменения полярности полюсов статора необходимо изменить направление тока. Это можно сделать только через H-мост.
Есть еще две причины для использования микросхемы H-моста
- Ток, потребляемый шаговым двигателем, достаточно высок. Вывод микроконтроллера может обеспечить максимальный ток до 15 мА. Шаговому двигателю требуется ток, который примерно в десять раз превышает это значение. ИС внешнего драйвера способна работать с такими высокими токами.
- Другая причина, по которой используется H-мост, заключается в том, что катушки статора представляют собой не что иное, как индуктор. Когда ток катушки меняет направление, генерируется всплеск. Обычный вывод микроконтроллера не может выдержать такие высокие пики, не повредив себя. Следовательно, для защиты контактов микроконтроллера необходим H-мост.
 Вывод микроконтроллера может обеспечить максимальный ток до 15 мА. Шаговому двигателю требуется ток, который примерно в десять раз превышает это значение. ИС внешнего драйвера способна работать с такими высокими токами.
Вывод микроконтроллера может обеспечить максимальный ток до 15 мА. Шаговому двигателю требуется ток, который примерно в десять раз превышает это значение. ИС внешнего драйвера способна работать с такими высокими токами.Наиболее распространенной микросхемой H-моста, используемой в большинстве проектов сопряжения биполярных шаговых двигателей, является L293D.
Взаимодействие с микроконтроллером
Для управления двигателем требуются 4 контакта микроконтроллера. Нам нужно обеспечить L293D питанием 5 В, а также напряжением, при котором двигатель должен работать. Поскольку мы будем использовать оба драйвера микросхемы, мы установим контакт включения для них обоих.
Схема сопряжения цепи драйвера биполярного двигателя
Схема цепи биполярного двигателя показана ниже:
Существует три различных способа управления биполярным шаговым двигателем:
- Одновременно подается напряжение только на одну из фазных обмоток. То есть либо AB, либо CD находятся под напряжением. Конечно, катушки будут запитаны таким образом, что мы получим правильную полярность. Но только одна фаза находится под напряжением. Этот тип шага дает меньший удерживающий момент, потому что только одна фаза находится под напряжением.
- В этом методе обе фазы активируются одновременно. Ротор будет выравниваться между двумя полюсами. Такое расположение даст более высокий удерживающий момент, чем предыдущий метод.
- Третий метод используется для полушага. Этот метод обычно используется для улучшения угла шага. Здесь на шаге 1 включена только 1 фаза, затем на шаге 2 включены 2 фазы, затем снова включена только одна фаза, и последовательность продолжается.
Биполярные шаговые приводы
Многие компании начали сборку собственных биполярных шаговых приводов. Необходимо соблюдать осторожность при правильном подключении шагового двигателя к приводу.
Кроме того, привод должен обеспечивать достаточный ток для вашего шагового двигателя. Микроконтроллер должен подавать на привод только сигналы шага и направления.
Этот метод займет только два контакта микроконтроллера и поможет проектам, требующим большого количества контактов микроконтроллера для других функций.
Униполярный степпер против биполярного степпера
Как униполярный, так и биполярный степпер широко используются в проектах. Однако они имеют свои преимущества и недостатки с точки зрения применения.
Преимущество униполярного двигателя заключается в том, что нам не нужно использовать сложную схему Н-моста для управления шаговым двигателем.
Только простой драйвер, такой как ULN2003A, удовлетворительно справится с этой задачей. Но у униполярных двигателей есть один недостаток. Крутящий момент, создаваемый ими, значительно меньше. Это связано с тем, что ток протекает только через половину обмотки. Следовательно, они используются в приложениях с низким крутящим моментом.
Но у униполярных двигателей есть один недостаток. Крутящий момент, создаваемый ими, значительно меньше. Это связано с тем, что ток протекает только через половину обмотки. Следовательно, они используются в приложениях с низким крутящим моментом.
С другой стороны, биполярные шаговые двигатели немного сложны в подключении, так как мы должны использовать реверсивную микросхему драйвера H-моста, такую как L293D.
Но преимущество в том, что ток будет протекать через полную катушку. Результирующий крутящий момент, создаваемый двигателем, больше по сравнению с униполярным двигателем.
Хотите учиться быстрее? 🎓
Каждую неделю получайте электротехнические товары на свой почтовый ящик.
Кредитная карта не требуется — это абсолютно бесплатно.
О Electrical4U
Electrical4U посвящен обучению и распространению всего, что связано с электротехникой и электроникой.
…
Основы подключения: униполярный и биполярный
Простой способ изменить характеристики скорости и крутящего момента шагового двигателя — подключить его к другому типу драйвера или изменить конфигурацию его проводки.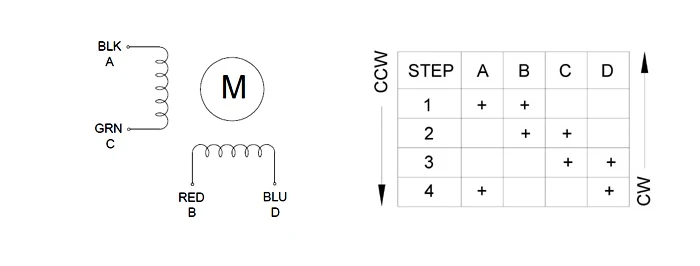 Однако это еще не все. Знание плюсов и минусов между «униполярным» и «биполярным» может улучшить или испортить производительность вашего шагового двигателя.
Однако это еще не все. Знание плюсов и минусов между «униполярным» и «биполярным» может улучшить или испортить производительность вашего шагового двигателя.
Давайте посмотрим на эти две разные кривые скорость-крутящий момент. Эти кривые фактически генерируются одним и тем же «базовым» двигателем, но с разными драйверами. Обратите внимание, как меняются характеристики скорости и крутящего момента. СОВЕТ: выберите определенную скорость, затем сравните крутящий момент на этой скорости.
| Шаговый двигатель NEMA 23 с биполярным драйвером | Шаговый двигатель NEMA 23 с униполярным драйвером |
Кривая скорости и крутящего момента отображает рабочие характеристики шагового двигателя с заданным набором напряжения, тока и типа драйвера и используется для определения того, будет ли двигатель соответствовать требованиям к крутящему моменту и скорости для приложения. На форму кривой скорости и крутящего момента влияют электрические характеристики двигателя, такие как ток или индуктивность.
На форму кривой скорости и крутящего момента влияют электрические характеристики двигателя, такие как ток или индуктивность.
ОБЗОР: Как создается крутящий момент?
Во-первых, давайте начнем с самого начала и рассмотрим, как создается крутящий момент шагового двигателя. Мы знаем, что крутящий момент пропорционален произведению управляющего тока и числа витков обмотки (катушки). При большем числе оборотов крутящий момент выше, но крутящий момент на высокой скорости приносится в жертву, тем самым ограничивая максимальную скорость, с которой шаговый двигатель может эффективно работать. При меньшем числе оборотов крутящий момент уменьшается на более низких скоростях, но сохраняется до более высоких скоростей.
Давайте посмотрим на формулу крутящего момента.
Вот как ток влияет на кривую скорости вращения шагового двигателя.
Вот как количество витков обмотки влияет на кривую скорости вращения шагового двигателя.
Но… что, если вы не можете изменить ток обмотки или число витков?
N (количество витков обмотки) и I (ток) обычно указываются и не могут быть изменены, так что еще вы можете сделать, чтобы изменить кривую скорости вращения? Если у вас есть как минимум 6 проводов от вашего шагового двигателя, ответом будет рассмотрение «униполярной» и «биполярной» конфигурации проводки.
Что означает «униполярный» и «биполярный»?
Теперь давайте посмотрим на слова «униполярный» и «биполярный». Что именно означают эти слова?
Термины «униполярный» и «биполярный» произошли от типа драйверов, используемых для управления шаговыми двигателями. Проще говоря, «уни» в униполярном означает «один», а «би» в биполярном означает «два». «Полярный» означает электрическую и магнитную полярность (к вашему сведению: направление тока определяет полярность).
Основное различие между «униполярными» и «биполярными» шаговыми двигателями заключается в центральном ответвлении провода, которое разделяет полные витки обмотки пополам. Это можно сделать с помощью одного или двух проводов. Если вы удалите центральный ответвитель, то он станет биполярным последовательным соединением. Это можно сделать с помощью одного или двух проводов. Если вы удалите центральный ответвитель, то он станет биполярным последовательным соединением. |
Основное различие между «униполярными» драйверами и «биполярными» заключается в их способности передавать ток. Способность драйвера подавать ток в одном или обоих направлениях напрямую зависит от количества транзисторов, используемых драйвером. Биполярный драйвер потребует вдвое большего количества транзисторов, чем однополярный драйвер, чтобы управлять током, протекающим в обоих направлениях.
| СОВЕТ : Разъяснение между «Биполярный», «Биполярный-последовательный», «Биполярный-параллельный» и т. д. |
Сам по себе двигатель не является униполярным или биполярным, но производители могут классифицировать шаговые двигатели как «униполярные» или «биполярные» в зависимости от количества подводящих проводов. В то время как термины «униполярный» и «биполярный» относятся к типу используемого привода, «униполярный», «биполярный-последовательный» и «биполярный-параллельный» используются для описания проводки между двигателем и приводом. Подробнее об этом позже. |
 Следовательно, шестипроводной шаговый двигатель можно классифицировать как «униполярный» двигатель, а четырехпроводной шаговый двигатель можно классифицировать как «биполярный». Однако помните, что «униполярный» двигатель всегда можно преобразовать в «биполярный».
Следовательно, шестипроводной шаговый двигатель можно классифицировать как «униполярный» двигатель, а четырехпроводной шаговый двигатель можно классифицировать как «биполярный». Однако помните, что «униполярный» двигатель всегда можно преобразовать в «биполярный».
При переходе от однополюсного к двухполюсному или наоборот мы фактически изменяем электрические характеристики обмотки внутри двигателя, такие как напряжение, сопротивление и индуктивность, а также характеристики крутящего момента. Производители двигателей часто указывают разные наборы спецификаций для одного и того же двигателя в зависимости от типа соединения. Различные варианты обмотки предлагаются для шаговых двигателей с одинаковым типоразмером корпуса и длиной пакета для обеспечения гибкости.
Предлагаются различные обмотки для шаговых двигателей NEMA 23 (2,22″/56,4 мм), короткая длина блока
Как видно выше, гибкость соединений увеличивается с увеличением количества проводов. Шесть проводов двигатель может быть подключен униполярно или биполярно последовательно. Восьмипроводной двигатель может быть подключен униполярно, биполярно последовательно или биполярно параллельно. имеет четыре клеммы для подключения четырех, шести или восьми проводов от двигателя.0007
Хотя подключение четырехпроводного биполярного шагового двигателя к четырехконтактному биполярному драйверу довольно простое, вам действительно нужно знать, что вы делаете, чтобы подключить шести- или восьмипроводной биполярный шаговый двигатель к биполярному драйверу.
Не волнуйся. В конце этого поста мы поделимся шпаргалкой по подключению шагового двигателя, чтобы упростить задачу.
СОВЕТ. Можно ли использовать спецификацию максимального удерживающего момента для расчета шагового двигателя? |
Поскольку максимальный удерживающий момент представляет собой выходной момент шагового двигателя при нулевой или очень низкой скорости, его не рекомендуется использовать для расчета двигателя. |
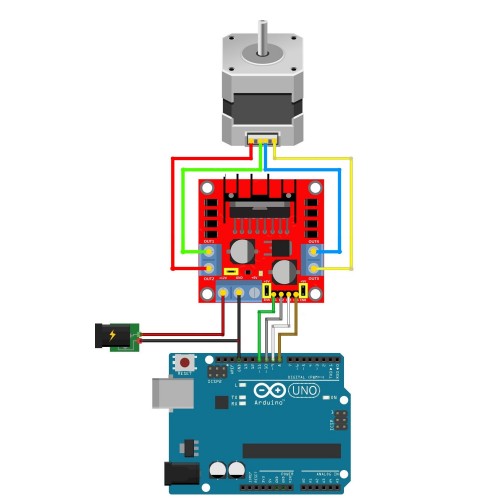 Он используется для указания максимального крутящего момента, который может быть создан двигателем при полном номинальном токе.
Он используется для указания максимального крутящего момента, который может быть создан двигателем при полном номинальном токе.
Каковы все возможные способы подключения?
Существует только один способ подключения шестипроводного униполярного шагового двигателя к шестиконтактному униполярному приводу, но существует несколько способов подключения шагового двигателя к биполярному приводу в зависимости от количества проводов и желаемой производительности. В то время как униполярные драйверы более экономичны, биполярные драйверы обеспечивают большую гибкость и позволяют несколькими способами подключать четырех-, шести- и восьмипроводные шаговые двигатели.
Конфигурации биполярной проводки разделены на биполярно-последовательную, биполярно-параллельную и биполярную полуобмотку.
- Однополярный (6 или 8 проводов)
- Биполярная серия (4, 6 или 8 проводов)
- Биполярно-параллельный (4 или 8 проводов)
- Биполярная полукатушка (6 или 8 проводов)
На приведенных ниже принципиальных схемах показаны обмотка двигателя и транзисторная схема драйвера.
Униполярная и биполярная полукатушка
Для униполярной и биполярной половинной катушки мы фактически разделяем полную катушку и используем половину обмотки за раз. При этом мы используем меньше витков обмотки, поэтому двигатель не будет развивать большой крутящий момент. Поскольку индуктивность остается низкой, крутящий момент может поддерживаться до более высоких скоростей.
Биполярная серия
Для биполярной серии мы используем полную катушку (обмотку). При использовании всей обмотки двигатель будет выдавать больший крутящий момент по сравнению с однополярным. Однако индуктивность также увеличивается в четыре раза, поэтому крутящий момент быстро падает на более высоких скоростях.
Биполярно-параллельный
Для достижения наилучших характеристик скорости и крутящего момента рекомендуется биполярно-параллельный. В этой конфигурации проводки также используется полная катушка, поэтому крутящий момент увеличивается примерно на 40% по сравнению с однополярным. Индуктивность также остается низкой, что позволяет поддерживать крутящий момент вплоть до более высоких скоростей. Однако мы должны увеличить ток примерно на 40%, чтобы получить эти преимущества.
В этой конфигурации проводки также используется полная катушка, поэтому крутящий момент увеличивается примерно на 40% по сравнению с однополярным. Индуктивность также остается низкой, что позволяет поддерживать крутящий момент вплоть до более высоких скоростей. Однако мы должны увеличить ток примерно на 40%, чтобы получить эти преимущества.
Изменения в характеристиках приведены ниже.
| Соединения | Сопротивление | Индуктивность | Текущий | Напряжение | Удерживающий момент |
| (Ом) | (мГн) | (А) | (В) | (унция дюйм) | |
| Однополярный | Н/Д | н/д | н/д | н/д | н/д |
| Биполярная серия | Однополярный X 2 | Униполярный X 4 | Однополярный X 0,707 | Однополярный X 1. 414 414 | Однополярный X 1.414 |
| Биполярный Половина катушки | То же, что и монополярный | То же, что и монополярный | То же, что и монополярный | То же, что и монополярный | То же, что и Unipolar |
| Биполярный параллельный | Однополярный X 0,5 | То же, что и монополярный | Однополярный X 1.414 | Однополярный X 0,707 | Однополярный X 1.414 |
При биполярно-параллельном соединении мы имеем низкую индуктивность при высоком токе и низком напряжении, что является хорошей комбинацией для достижения наилучших общих характеристик крутящего момента.
Как вы подключаете однополярную или биполярную последовательную, биполярно-параллельную или биполярную полукатушку?
Быстрым ответом было бы следовать правильным схемам подключения двигателя.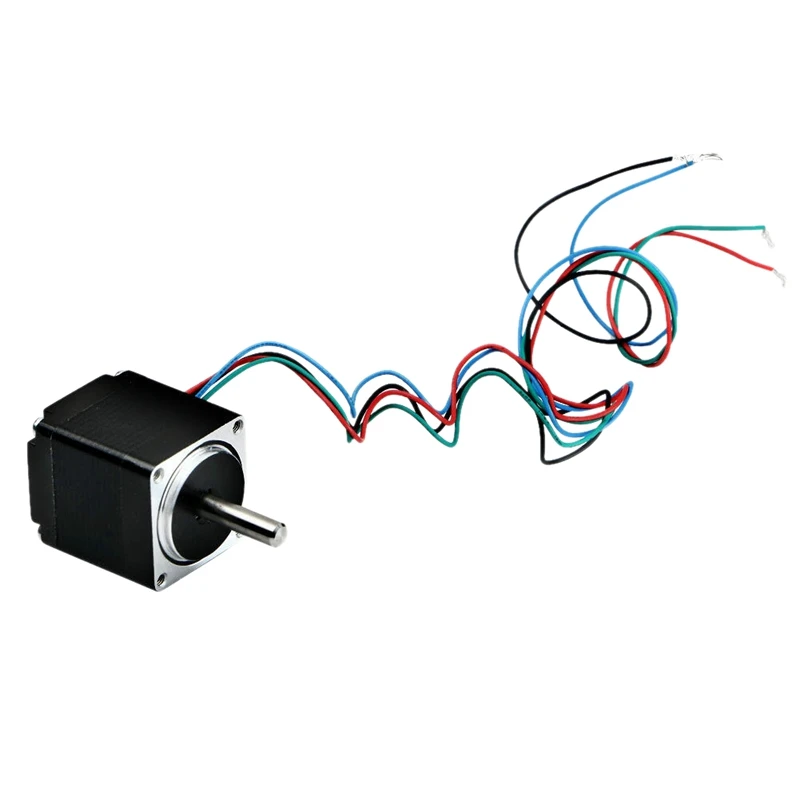 Сначала решите, какие конфигурации подключения возможны для вашего шагового двигателя, а затем найдите правильную схему подключения.
Сначала решите, какие конфигурации подключения возможны для вашего шагового двигателя, а затем найдите правильную схему подключения.
На приведенных ниже схемах показаны схемы внутренних обмоток шаговых двигателей с разным количеством выводов. Отслеживая текущий поток, вы можете визуализировать, какая часть обмотки используется. Если есть интерес к этому, пожалуйста, прокомментируйте.
| 4 провода | 5 проводов | 6 проводов | 8 проводов |
| СОВЕТ : Четырехпроводные шаговые двигатели |
Четырехпроводные шаговые двигатели могут быть намотаны как биполярно-последовательно, так и биполярно-параллельно внутри. Производители двигателей иногда не указывают, наматывается ли четырехпроводной двигатель для биполярного последовательного или биполярно-параллельного соединения. |
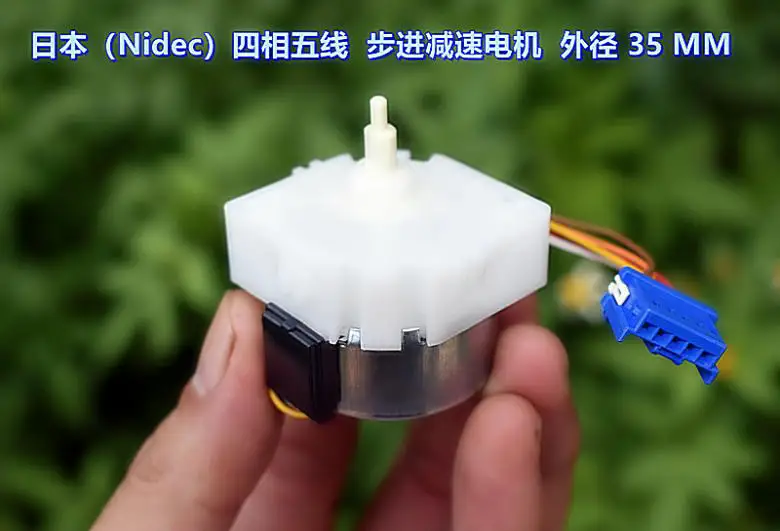 Тем не менее, отрасль движется к биполярно-параллельному стандарту для параллельных соединений из-за его преимуществ в производительности. Еще одним фактором является снижение стоимости драйвера.
Тем не менее, отрасль движется к биполярно-параллельному стандарту для параллельных соединений из-за его преимуществ в производительности. Еще одним фактором является снижение стоимости драйвера.
Здесь мы покажем, как управлять конфигурацией проводки из стандартных подключений.
Например, чтобы подключить шаговый двигатель с восемью выводами к биполярному драйверу с биполярно-параллельной конфигурацией проводки, вы должны соединить эти провода вместе, а затем подключить к соответствующим клеммам:
- Подключите черный и оранжевый к клемме А
- Подсоедините желтый/зеленый к клемме A-
- Подключить красный/коричневый к клемме B
- Подключите белый/синий к клемме B-
| СОВЕТ : Большая тройка проводки шагового двигателя |
Для успешной системы шагового двигателя требуются три компонента: |
Какой метод подключения лучше?
Это вопрос с подвохом.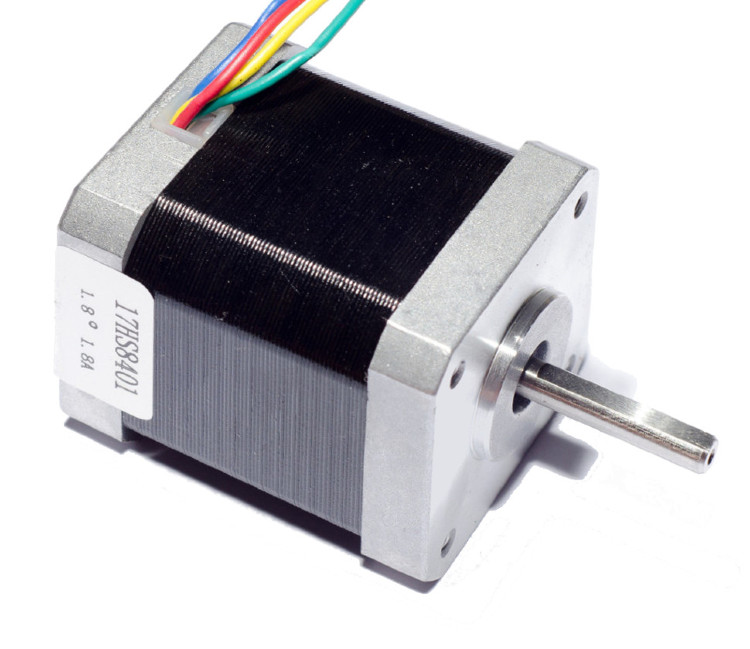 Ответ: это действительно зависит от вашего приложения. Тип конфигурации проводки обычно включается в расчет двигателя на этапе проектирования машины. Эти трюки с проводкой также позволяют повторно использовать один и тот же двигатель для разных целей.
Ответ: это действительно зависит от вашего приложения. Тип конфигурации проводки обычно включается в расчет двигателя на этапе проектирования машины. Эти трюки с проводкой также позволяют повторно использовать один и тот же двигатель для разных целей.
Например, если вы используете настройку униполярного шагового двигателя и хотите увеличить его низкоскоростной крутящий момент для другого применения, стоит изучить конфигурацию биполярной последовательной проводки, чтобы сохранить тот же размер двигателя. Для наилучшего сочетания скорости и крутящего момента попробуйте биполярно-параллельный. Однако он требует большего тока от драйвера. Помните, что это также зависит от того, какой у вас тип драйвера и какой ток он может выдавать.
Здесь показаны различия в характеристиках двигателя с перекрытием каждой отдельной кривой скорости-крутящего момента. Легко увидеть, как биполярно-параллельный (или параллельный биполярный) режим работает лучше всего.
Резюме
По-разному подключая один и тот же шаговый двигатель, вы можете изменить электрические характеристики его обмотки и, в свою очередь, изменить рабочие характеристики того же двигателя, чтобы он лучше подходил для конкретного применения. Однако вам нужно знать, что вы делаете.
Однако вам нужно знать, что вы делаете.
Биполярно-параллельные шаговые двигатели становятся все более популярными из-за снижения стоимости компонентов схемы драйвера. Чтобы упростить проводку, Oriental Motor имеет внутреннюю обмотку, поэтому для подключения требуется только четыре провода. Для каждого размера рамы и длины пакета предлагается несколько вариантов обмотки, что обеспечивает максимальную гибкость при интеграции в различные электрические конструкции драйверов.
При работе с шаговыми двигателями лучше убедиться, что вся команда находится на одной странице с конфигурацией проводки. Вы можете выбрать и купить правильный двигатель, но неправильная его проводка создаст как минимум некоторую путаницу.
Вот памятка, которая поможет вам при работе с униполярными и биполярными шаговыми двигателями. Не стесняйтесь добавить в закладки, если это поможет.
Подпишитесь, если хотите получать уведомления о будущих публикациях.
Шаговый двигатель с кабелем — ROB-09238
4.
 3 из 5
3 из 5
На основании 21 оценок:
Сейчас просматриваются все отзывы покупателей.
Показаны результаты со звездным рейтингом.
1 из 1 нашел это полезным:
Хороший!
от участника № 513903
проверенный покупатель
Очень хороший продукт, работает, как описано, было бы еще лучше, если бы в него входила универсальная монтажная втулка…
Идеально подходит для работы.
от участника № 507443
проверенный покупатель
Используется для привода силового фокусера на телескопе. Большой крутящий момент и надежный. Методы проб и ошибок означают ошибки — для этого двигателя это не проблема.
Большой крутящий момент и надежный. Методы проб и ошибок означают ошибки — для этого двигателя это не проблема.
8 из 8 нашел это полезным:
Превосходно
от RobotCamera
проверенный покупатель
У меня есть три таких мотора, и я использую их для видеосъемки, микрофотографии (управление позиционированием оборудования) и проектов по робототехнике. Они кажутся надежными, имеют достаточный крутящий момент для всех моих потребностей (пока) и могут прекрасно управляться либо чипами H-bridge, такими как L293D, либо более многофункциональными драйверами двигателей, такими как EasyDriver.
Но, как я только что обнаружил, работа с радиочастотой SLF, которую вы генерируете при переключении этих двигателей (и всех шаговых двигателей) на типичных скоростях, не всегда беззаботна. Возникающие радиопомехи/электромагнитные помехи могут создавать помехи для чувствительных входных контактов микроконтроллеров и, в моем случае, для модуля ИК-приемника (Vishay TSOP38238). Однако решение довольно простое: если на деталь воздействуют электромагнитные помехи, защитите ее, окружив ее заземленным проводящим материалом. Вы можете купить защиту или сделать ее самостоятельно. Я экранирую свой модуль ИК-приемника, помещая его на кусок печатной платы с большой пластиной заземления, которая находится между ИК-приемником и контроллером шагового двигателя, выходными дорожками, проводкой и двигателем.
Возникающие радиопомехи/электромагнитные помехи могут создавать помехи для чувствительных входных контактов микроконтроллеров и, в моем случае, для модуля ИК-приемника (Vishay TSOP38238). Однако решение довольно простое: если на деталь воздействуют электромагнитные помехи, защитите ее, окружив ее заземленным проводящим материалом. Вы можете купить защиту или сделать ее самостоятельно. Я экранирую свой модуль ИК-приемника, помещая его на кусок печатной платы с большой пластиной заземления, которая находится между ИК-приемником и контроллером шагового двигателя, выходными дорожками, проводкой и двигателем.
Еще одна вещь, которая мне нравится в этом двигателе, возможно немного странная, это очень длинный кабель. Обычно мне нужна только половина длины. Я разрезаю его пополам и заплетаю. А вторую половину я отрезал? Из него получается отличный многожильный провод! Итак, привет, дополнительный провод для подключения 🙂
Для подключения этого двигателя к объектам обратимым, но все же надежным способом я рекомендую 4-контактные разъемы и разъемы mini XLR.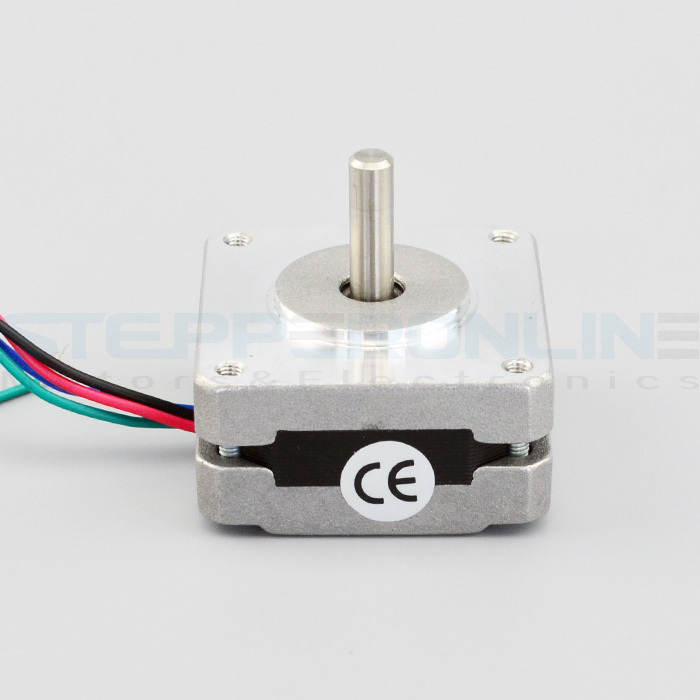 Они могут быть дорогими, но они того стоят, потому что случайное отключение работающего двигателя при подключении к контроллеру может привести к поломке контроллера. Я также использовал разъемы S-video (4-контактный мини-DIN) в прошлом, но, попробовав мини-XLR, я обнаружил, что это гораздо лучшее решение.
Они могут быть дорогими, но они того стоят, потому что случайное отключение работающего двигателя при подключении к контроллеру может привести к поломке контроллера. Я также использовал разъемы S-video (4-контактный мини-DIN) в прошлом, но, попробовав мини-XLR, я обнаружил, что это гораздо лучшее решение.
И последнее, на что стоит обратить внимание: вы можете разобрать эти моторы, чтобы посмотреть, как они работают, и легко собрать их обратно. После открытия вам просто нужно немного потянуть за ротор, потому что там есть довольно сильные магниты. Вы также можете перевернуть ось, чтобы она выходила с другой стороны — мне пришлось сделать это для одного проекта, чтобы установить крепление двигателя там, где я хотел.
4 из 5 нашел это полезным:
Шаговый двигатель
от участника #636145
проверенный покупатель
Это отличный низкочастотный генератор для ветряных мельниц, водяных колес, научных выставок. .. выдает 6 В переменного тока со скоростью около 70 об/мин, что обеспечивает питание 5 В. Светодиоды.
.. выдает 6 В переменного тока со скоростью около 70 об/мин, что обеспечивает питание 5 В. Светодиоды.
2 из 4 нашел это полезным:
Неплохо для выработки электроэнергии!
от участника #432286
проверенный покупатель
Купил этот мотор для ветрогенератора (проект моего универа). Запустили его с трехлопастной турбиной, напечатанной на 3D-принтере, с аэродинамическим профилем NACA 2410, размахом 5,25 дюйма и хордой 1 дюйм со ступицей 0,45 дюйма (таким образом, внутренний радиус лопасти составляет 0,45 дюйма, а внешний радиус — 5,7 дюйма).
В испытательной установке
использовался резистор 9,65 кОм, подключенный к двум выпрямительным мостам (по одному на каждый выход) с диодами Шоттки с прямыми потерями 0,32 В и электролитическими конденсаторами емкостью 1000 мкФ от DigiKey. 92/R, поэтому мощность на трех скоростях составляла 0,010 А, 0,385 А и 0,517 А.
92/R, поэтому мощность на трех скоростях составляла 0,010 А, 0,385 А и 0,517 А.
Мы также использовали дешевый круговой шаговый двигатель от sparkfun, который выдавал только 0,030 А при 12 м/с и 1450 об/мин.
РЕДАКТИРОВАТЬ: В более раннем обзоре я ошибочно предположил, что «трение», наблюдаемое с этим двигателем, было связано с трением магнита о внешние стенки. На самом деле, это «трение» было фиксирующим крутящим моментом, наблюдаемым, когда провода были закорочены друг на друга. При использовании в качестве генератора нагрузка (сопротивление) на проводах будет определять степень фиксации, когда вы пытаетесь раскрутить турбину.
В предыдущем обзоре требовалась универсальная монтажная втулка — мы использовали муфту SparkFun для валов от 5 мм до 1/4 дюйма для установки наших лопастей, которую также можно использовать с муфтой для валов от 3 мм до 1/4 дюйма для других двигателей.
Кажется, работает нормально
от пользователя #447117
проверенный покупатель
У меня не было особых проблем с установкой и запуском этой штуки с помощью Arduino Uno и H-моста TI SN754410.
Просто и эффективно
автор: rickcjmac
проверенный покупатель
Удивительно мощный и простой мотор. Я использовал TB6612FNG с настенной розеткой на 12 В, и он сразу же запустился!
Нет подушек двигателя?
от пользователя #772669
проверенный покупатель
Я уверен, что двигатель работает отлично, но это опора двигателя NEMA 16… они не продают опоры двигателя NEMA 16, и мне очень трудно найти такую (где-либо).
Надежный маленький двигатель, который делает то, что мне нужно
от Red Imp Robotics
проверенный покупатель
Я делаю самодельный робот-яйцо/сферобот и управляю им с помощью Easy Driver. Еще не совсем закончен проект, но пока он работает очень хорошо.
Работает отлично, возможно, захочется получить некоторые дополнения
от пользователя #127088
проверенный покупатель
Отличный шаговый двигатель! У него большой крутящий момент, но его также можно разогнать до довольно высоких скоростей, прежде чем он начнет прыгать. Я лично использую его в самобалансирующемся роботе, хотя я планирую купить еще один, чтобы попытаться построить небольшой умный замок.
Разъемы:
Они просто поставляются с длинными многожильными проводами — разъемов нет. Я настоятельно рекомендую использовать JST или XLR (например, рекомендуется RobotCamera) для их подключения. Вы даже можете припаять 4-контактный JST к своей плате (например, EasyDriver), чтобы убедиться, что вы всегда правильно подключаете двигатель и что он не отключается во время работы схемы управления (что может разрушить вашу схему). Я думаю, что Sparkfun продает JST с маркировкой «поляризованные разъемы», но вы можете легко найти огромные упаковки разъемов JST, готовых к обжиму. Затем купите кабельную оплетку, чтобы кабели не спадали по всей конструкции.
Примечание: мне бы хотелось, чтобы вместо проводов на их стороне был только разъем JST. Вот как подключены степперы моего 3D-принтера, но это тоже работает нормально.
Крепление:
Кажется, их нелегко установить сзади — только спереди. Я не пробовал, но я думаю, что удаление задних винтов приведет к тому, что корпус двигателя развалится, что не очень удобно для монтажа. Тот факт, что они устанавливаются только спереди, является лишь небольшой оговоркой. Они очень прочные независимо от того, как вы их крепите.
Работает нормально
от участника № 371756
проверенный покупатель
Как любитель, я не напрягаю мотор, но вроде работает нормально. Я написал код для увеличения/уменьшения скорости в соответствии с моими потребностями.
Работает как положено
от участника #1519918
проверенный покупатель
Эти шаговые двигатели работают так, как я ожидал, я купил 2 из них, и один, кажется, периодически пропускает влияет только на длительные пробежки.
Хороший мотор, достойный крутящий момент
от пользователя № 1558765
проверенный покупатель
Единственная жалоба заключается в том, что провода, отходящие от этого двигателя, очень трудно зачистить.
Отлично работает, нравится длинный кабель!
от участника № 15
проверенный покупатель
Я использую это с креплением actobotic, стойками и муфтой вала, и все работает отлично.
Я использую EasyDriver с блоком питания 12 В, 1 А без проблем.
Длинный кабель полезен.
Хороший мотор
от участника № 1568013
проверенный покупатель
Я попробовал этот двигатель вместе с платой «EasyDriver — драйвер шагового двигателя», чтобы почувствовать работу с шаговыми двигателями с помощью Raspberry Pi 4B. Первоначально я пытался использовать плату Pi-Plates Motor для управления универсальным шаговым двигателем NEMA 17, но, не сопоставив их (по усилителю), я в конечном итоге потерял плату Pi-Plates из-за опыта обучения… Получение рекомендаций по обоим компонентам в SparkFun решили эту проблему, и IMO EasyDriver предлагает более продвинутое управление двигателем, чем плата Pi-Plates.
Отлично работает с EasyDriver и Raspberry Pi Pico
от пользователя № 1284753
проверенный покупатель
Я купил это для управления Raspberry Pi Pico RP2040 и обнаружил, что с помощью EasyDriver и MicroPython шаговый двигатель работает очень плавно. Я с нетерпением жду возможности добавить это в проект по робототехнике.
0 из 3 нашел это полезным:
проблема с подшипниками
от пользователя #688742
проверенный покупатель
я покупаю четыре детали, а 2 из них имеют проблемы с усилием пружины и это останавливает ротор при попытке провернуть его вручную
я все исправлю, ничего страшного
Разница между биполярными и униполярными приводами для шаговых двигателей
Работа над моторизованной разработкой требует некоторых знаний о двигателях и контроллерах. эта статья
ориентирован на шаговые двигатели, которые представляют собой тип бесщеточного двигателя постоянного тока с большим количеством полюсов. Этот
технология обычно управляется в разомкнутом контуре без какого-либо датчика обратной связи, что означает, что ток обычно подается на
фазы, не зная положения ротора. Ротор перемещается, чтобы выровняться с магнитным потоком статора, затем
ток можно подавать на следующую фазу.
Рассмотрим два способа подачи тока в катушку: двухполярный и однополярный. В этой статье мы объясним
различия биполярных и униполярных двигателей и способов вождения. Мы покажем преимущества и ограничения обеих технологий.
Рассмотрим пример четырехступенчатого шагового двигателя с постоянными магнитами.
(см. рисунок 1). Ротор выполнен с однополюсной парой магнитов, а
статор состоит из двух фаз, фазы A и фазы B.
- В униполярном: ток всегда течет в одном направлении. Каждый
катушка предназначена для одного направления тока, то есть либо катушка
A+ или катушка A- запитана. Катушки A+ и A- никогда не
питание вместе. - В биполярном: ток может течь в обоих направлениях во всех катушках.
фазы A+ и A- запитаны вместе.
Для биполярного двигателя требуется минимум одна катушка на фазу, а для униполярного двигателя требуется минимум две катушки на фазу. Рассмотрим оба варианта подробнее.
КОНСТРУКЦИЯ ДВИГАТЕЛЯ
УНИПОЛЯРНЫЙ
В однополярной конфигурации каждая фаза двигателя
состоит из двух обмоток. С двухфазным
двигатель состоит из фаз А и В, двигатель имеет четыре
обмотки катушки (см. рис. 2).
- Фаза А состоит из А+, А-
- Фаза B состоит из B+, B-
Для каждой катушки ток может протекать только по одному
направление. Вот почему мы называем его однополярным.
В случае привода напряжения система управления очень
легко, потому что на катушку приходится один транзистор (переключатель). Когда
транзистор закрыт, на катушку подается питание. Смягчить,
транзисторы попеременно закрыты и открыты.
Транзисторы Q1 и Q2 не могут быть закрыты одновременно
время. Для питания фазы А мы закрываем либо транзистор Q1, либо
Q2, в зависимости от текущего направления мы хотим работать
(см. рис. 3).
При однополярном управлении только половина фазы
питается одновременно, что означает, что ток использует только половину
объема меди. Как правило, с последовательным приводом напряжения
сопротивления применяются для уменьшения электрического времени
постоянный (подробнее см. ниже).
БИПОЛЯРНЫЙ
Для биполярных двигателей требуется только одна обмотка катушки на фазу. Мы
назовите его биполярным, потому что ток может идти в обоих направлениях
на катушку. Для управления используются восемь транзисторов с двумя Н-мостами.
требуется (см. рис. 4).
Для коммутации транзисторы попеременно
закрывается и открывается, как показано ниже (см. рис. 5).
Преимущество биполярного привода состоит в том, что вся медь
используется фаза.
Такие биполярные приводы используются либо в приводах напряжения, либо в
Источник тока. В случае источника тока, обычно ток в
каждая фаза управляется широтно-импульсной модуляцией (ШИМ) .
ПРЕИМУЩЕСТВА И ОГРАНИЧЕНИЯ
ПРИВОД НАПРЯЖЕНИЯ
В случае управления напряжением управлять униполярными двигателями очень просто, так как для этого требуется простая электроника с четырьмя транзисторами.
Это очень экономичное решение. Инженеры интересовались этим типом решения много лет назад, когда
электронные компоненты были дороже, чем сегодня.
Биполярные двигатели могут приводиться в действие с помощью привода напряжения; для этого требуются мосты 2H.
ПРИВОД ТОКА
Для привода тока рекомендуется выбрать биполярный режим. Работа в токовом приводе с униполярной технологией требует
более сложное электронное решение для более низких характеристик двигателя, чем с биполярным драйвером.
ПРЕДОСТЕРЕЖЕНИЕ ПРИ ПРИВОДЕ НАПРЯЖЕНИЯ
Из-за эффекта индуктивности току в катушке требуется некоторое время для увеличения. Либо с униполярным, либо с биполярным, вы можете
добавьте последовательное сопротивление, чтобы уменьшить электрическую постоянную времени (L/R).
При добавлении внешнего сопротивления ток уменьшается (i= U/(R+r)). Таким образом, с дополнительным сопротивлением для
при той же подаваемой мощности мы будем иметь:
- На низкой скорости меньший крутящий момент. Ток ниже из-за мощности джоулей, рассеиваемой на внешнем сопротивлении, т.к.
крутящий момент пропорционален току, двигатель будет развивать меньший крутящий момент. - На высокой скорости более высокий крутящий момент. Даже если на внешнем сопротивлении рассеивается некоторая мощность в джоулях, двигатель сможет
для обеспечения большего крутящего момента благодаря более низкой электрической постоянной времени, позволяющей быстрее нарастать току в катушке.
Примечание. Если мы увеличим напряжение питания, мы сможем компенсировать меньший ток, но общая энергоэффективность уменьшится.
быть уменьшена. Крутящий момент улучшается на высокой скорости и остается таким же на низкой скорости.
УДЕРЖИВАЮЩИЙ МОМЕНТ
Удерживающий момент — это максимальный крутящий момент, который двигатель может удерживать при остановке. Удерживающий момент пропорционален постоянному крутящему моменту
и ток в фазе.
Создание более высокого крутящего момента может быть достигнуто за счет увеличения
число витков катушки или путем увеличения
текущий поток.
Увеличение тока выделяет дополнительное тепло из-за
рассеивание джоулевых потерь (P джоулей = R × i
2
).
подача тока ограничена термической способностью
катушка. Температура катушки обычно может достигать
максимальная, допустимая температура змеевика, обычно
100°C или 130°C, в зависимости от типа двигателя.
Теперь давайте посмотрим на потери в джоулях в обеих комбинациях (см. рис. 6), учитывая 1 фазу ВКЛ:
Учитывая, что каждая отдельная катушка имеет собственное сопротивление, индуктивность и константу крутящего момента, и если потери в джоулях одинаковы
для обоих случаев P джоулей ед. = P джоулей ед. = P 0
…тогда мы будем иметь:
больший крутящий момент, чем униполярный привод.
При той же электрической мощности биполярный привод дает лучшие результаты, чем однополярный.
ДИНАМИЧЕСКИЙ РЕЖИМ
Как показано выше, при одинаковой рассеиваемой мощности биполярный режим может обеспечить на 40 % больший крутящий момент. Однако при высоком
скорость в приводе напряжения униполярный двигатель может обеспечить более высокий крутящий момент, чем биполярный двигатель, поскольку ток может двигаться быстрее в
катушка. Вы можете увидеть пример ниже (см. рисунок 7).
ПРОВОДА / СОЕДИНЕНИЕ ДВИГАТЕЛЯ
92) и тот же крутящий момент
производительности при той же электрической мощности (см. рис. 9).
Серийная сборка имеет сопротивление в четыре раза выше, чем
параллельная сборка.
Для последовательного соединения требуется удвоенный ток и половина
напряжение параллельного соединения.
Последовательное или параллельное соединение соответствует источнику питания.
ЗАКЛЮЧЕНИЕ
Как униполярные, так и биполярные сборки имеют преимущества (см. рис. 10).
В прошлом широко использовалось однополярное управление. Из-за повышения стоимости электроники в настоящее время наблюдается тенденция работать с
биполярный в текущем драйве. Для привода по напряжению униполярный по-прежнему является экономичным вариантом.
СВЯЗАТЬСЯ С ИНЖЕНЕРОМ
Униполярный и биполярный привод для шаговых двигателей. Часть 1: принципы
Шаговые двигатели могут быть сконфигурированы для униполярного или биполярного привода; каждый подход имеет различные атрибуты производительности и компромиссы.
Широко используются шаговые двигатели, и, как и многие основные компоненты, они в некотором роде просты, но также имеют множество конфигураций и тонкостей работы. Для шаговых двигателей (часть термина из двух слов «двигатель» часто пропускается) существуют две широко используемые конфигурации обмотки и привода: униполярная и биполярная.
Во-первых, примечание о терминологии, поскольку термины «униполярный» или «биполярный» здесь имеют другое значение, чем в большинстве дискуссий о схемах вообще и особенно об аналоговых схемах. Здесь это не относится к шинам питания постоянного тока с шаговым двигателем. В этих случаях «униполярный» означает, что есть положительное напряжение питания и заземление, но нет отрицательного питания, и схема работает исключительно от этого несимметричного источника питания. Напротив, «биполярный» источник питания означает, что источник питания имеет как положительную, так и отрицательную шину. Биполярный или разделенный источник питания необходим, поскольку для таких компонентов, как операционные усилители, может потребоваться двойное питание для обеспечения полного диапазона характеристик в некоторых приложениях. Однако эти широко используемые значения униполярных и биполярных двигателей неприменимы к шаговым двигателям.
Шаговый двигатель представляет собой тип бесщеточного двигателя постоянного тока, состоящий из соединенных катушек, называемых «фазами». Ротор двигателя совмещается с катушками за счет усилия, создаваемого магнитным потоком статора, который создается током, протекающим в фазах (рисунок 1) .
Рис. 1: Шаговый двигатель использует электронную связь полюсов статора, чтобы тянуть и, таким образом, вращать магниты статора. (Изображение: статья по электротехнике)
Ток привода направляется на следующую фазу для создания постепенного и полностью контролируемого вращения. Последовательность управления этой следующей фазой приводит к вращательным шагам, которые могут составлять частичное, полное или непрерывное вращательное движение, необходимое и даже реверсивное, если это необходимо.
Основные схемы подключения фаз
Конструкция катушек и их схема подключения в целом подразделяются на униполярную и биполярную топологию подключения (рис. 2). Обратите внимание, что как униполярные, так и биполярные конфигурации шагового двигателя работают от униполярного (одного рельса) источника питания. Обе конфигурации могут управляться для вращения в обоих направлениях от одного источника питания. Униполярные и биполярные конфигурации имеют различия в схемах привода, характеристиках производительности, таких как скорость и крутящий момент, эффективность и стоимость материалов.
Рис. 2. Полюса шагового двигателя можно расположить и подключить в биполярной и однополярной конфигурациях, для каждой из которых требуется разное количество электронных переключателей (МОП-транзисторов). (Изображение: Texas Instruments)
Униполярный шаговый двигатель имеет одну обмотку с центральным отводом на фазу. Каждая секция обмотки переключается через коммутационную цепь для управления ориентацией магнитного поля. Таким образом, направление может быть изменено без необходимости переключения направления тока, поэтому изменение направления возможно, несмотря на однополярное питание. Проводка обычно имеет три провода на фазу и шесть проводов для обычного двухфазного шагового двигателя.
Существуют и другие способы соединения обмоток униполярных двигателей, так как соединения отдельных фаз (катушек) могут быть соединены внутри (рис. 3) . Использование таких внутренних соединений уменьшает размер и стоимость проводки разъема (это может показаться тривиальным, но это может быть не так) и упрощает намотку катушки поставщиком, но также уменьшает возможность гибкости конфигурации привода; это может быть проблемой в некоторых случаях.
Рис. 3. Усложняет обсуждение, но предлагает больше вариантов производительности, расположение полюсов униполярного шагового двигателя бывает 4-, 5- и 6-проводным. (Изображение: Технические исследования)
Напротив, биполярный шаговый двигатель имеет только одну обмотку на фазу. Следовательно, схема управления более сложна, чтобы изменить направление тока, протекающего к катушке, и изменить направление магнитного поля. Униполярному двигателю требуется четыре транзистора (МОП-транзистора) для полного управления в полумостовой конфигурации, а биполярному двигателю для управления требуется восемь транзисторов, объединенных в два Н-моста. Однако с современными ИС и устройствами управления мощностью разница, особенно для двигателей меньшей мощности, невелика и может быть незначительной.
Основное различие между «униполярными» и «биполярными» шаговыми двигателями заключается в наличии провода центрального отвода, который разделяет полные витки обмотки пополам. Это разделение может быть выполнено одним соединительным проводом на пару или двумя проводами (по одному на соседние концы каждой катушки). При удалении центрального ответвления однополярное соединение становится биполярным последовательным.
[Цвета выводов двигателя в некоторой степени стандартизированы в отрасли и полностью соответствуют линейке продуктов отдельного поставщика, поэтому на многих схемах подключения показаны цвета, а не нумерация выводов. Некоторым это кажется полезным и ясным, в то время как другим это может показаться запутанным, но так оно и есть.]
Однако дело не только в выборе однополярной или биполярной конфигурации. Это также означает изменение электрических характеристик обмоток внутри двигателя и, таким образом, влияет на напряжение, сопротивление и индуктивность, скорость, ускорение и характеристики крутящего момента (рисунок 4) .