Содержание
Какой тип электродвигателя лучше всего подходит для моего проекта?
Добавлено 4 июля 2019 в 15:20
Узнайте, какие проекты лучше всего работают с коллекторными двигателями постоянного тока, бесколлекторными двигателями, серводвигателями и шаговыми двигателями.
Если вы разрабатываете проекты с движущимися частями, скорее всего, вам понадобится электродвигатель. Но существует несколько различных типов электродвигателей, обычно доступных разработчикам.
Коллекторные двигатели постоянного тока, бесколлекторные двигатели, серводвигатели и шаговые двигатели – это четыре наиболее распространенных типа электродвигателей, которые можно найти практически в любом проекте, в котором есть движение. Использование каждого из этих типов двигателей в вашем проекте имеет свой набор преимуществ и потенциальных проблем.
В данной статье рассматриваются типы проектов, для которых хорошо подходит тот или иной тип двигателя, и приводятся базовые рейтинги стоимости, крутящего момента, максимальной скорости и точности позиционирования по шкале от 0 до 5.
Коллекторный двигатель постоянного тока
Коллекторные двигатели постоянного тока являются самыми дешевыми, простыми и легкими в управлении из всех технологий двигателей, обсуждаемых в данной статье. Они идеально подходят для проектов с ограниченным бюджетом, которые не требую какого-либо точного управления позиционированием, и для которых отношение мощность/масса не очень важно.
Оценка характеристик коллекторных двигателей постоянного тока
Коллекторные двигатели постоянного тока также полезны для проектов, требующих чрезвычайно простого управления. Эти типы двигателей могут управляться не более чем замыканием/размыканием ключа. Управление их скоростью – это просто регулировка напряжения, подаваемого на двигатель или изменение коэффициента заполнения (или скважности) ШИМ сигнала, если задействован микроконтроллер.
Пример коллекторного двигателя постоянного тока, используемого в проекте
Лучшие типы проектов для коллекторных двигателей постоянного тока
Наборы для создания роботов для начинающих
Наборы для создания роботов для начинающих почти повсеместно используют коллекторные двигатели постоянного тока из-за их низкой стоимости и потому, что для их работы не требуются современные микроконтроллеры или сложное программирование.
Используя два двигателя с двумя колесами на каждой стороне шасси робота, мы можете создать достаточно сложного робота. Многие из базовых наборов робототехники такого типа доступны в магазинах.
Конструкции, использующие вибромоторы
Вибромоторы состоят из коллекторного двигателя постоянного тока с грузом, прикрепленным асимметрично к валу двигателя. Вы можете использовать вибромоторы в самодельных контроллерах и в любых других проектах, требующих доставки пользователю неслышимых уведомлений (например, как ваш телефон в режиме вибрации).
Из-за простоты управления коллекторными двигателями постоянного тока интенсивность вибрации можно модулировать, просто регулируя напряжение, подаваемое на двигатель.
Бесколлекторные двигатели
Несмотря на то, что бесколлекторные двигатели начинают заменять коллекторные двигатели постоянного тока в профессиональных устройствах и электромобилях, они также приобретают популярность в самодельных проектах благодаря наличию мощных, но доступных по цене микроконтроллеров.
Оценка характеристик бесколлекторных двигателейПара примеров бесколлекторных двигателей
Бесколлекторные двигатели обеспечивают большую надежность, более высокие максимальные скорости и более высокую эффективность по сравнению с коллекторными двигателями постоянного тока. Однако они дороже, чем коллекторные двигатели постоянного тока, особенно с учетом того, что им требуются специализированные контроллеры скорости для взаимодействия с микроконтроллерами, что иногда может быть дороже, чем сам двигатель.
Зачастую стоимость управления бесколлекторным двигателем превышает стоимость самого двигателя
Лучшие типы проектов для бесколлекторных двигателей
Любительские проекты летательных аппаратов
Бесколлекторные двигатели чрезвычайно полезны в любительских проектах летательных аппаратов, включая квадрокоптеры, вертолеты и самолеты.
Более высокая эффективность бесколлекторных двигателей, по сравнению с коллекторными двигателями постоянного тока, имеет два основных последствия для проектов радиоуправляемых летательных аппаратов:
- Бесколлекторные двигатели потребляют меньше энергии для выработки той же мощности, что и коллекторный двигатель постоянного тока примерно такого же размера, что означает, что разработчики получают больше энергии от того же аккумулятора.

- Бесколлекторные двигатели имеют боле высокую выходную мощность при том же размере двигателя. В частности, для летательных аппаратов отношение мощности к весу является критически важной характеристикой, и бесколлекторные двигатели полезны для увеличения этого отношения.
Бесколлекторные двигатели являются хорошим выбором для любительских проектов летательных аппаратов
Радиоуправляемые машины
Радиоуправляемые машины, особенно те, которые используются для гонок, также выигрывают от технологий бесколлекторных двигателей. Более высокое отношение мощности к весу полезно в радиоуправляемых машинах по той же причине, что и для летательных аппаратов, для повышения производительности.
Для радиоуправляемых машин бесколлекторные двигатели обеспечивают большие крутящий момент и максимальные скорости, чем бензиновые двигатели. Кроме того, бесколлекторные двигатели в радиоуправляемых машинах обеспечивают пиковый крутящий момент почти мгновенно при подаче питания. Бензиновые двигатели, напротив, должны развивать более высокие скорости, чтобы максимизировать крутящий момент.
Стабилизатор камеры
Если вы записываете видео своего проекта, очень полезным инструментом для повышения профессионализма ваших видео за счет уменьшения тряски может стать стабилизатор камеры.
Стабилизатор камеры – это устройство, которое поддерживает камеру неподвижно, обеспечивая более плавные кадры. Стабилизаторы выполняют это, компенсируя движение, используя три бесколлекторных двигателя, по одному на каждую ось движения.
Стабилизируйте камеру с помощью стабилизатора, состоящего из трех бесколлекторных двигателей
Серводвигатели
В то время как коллекторные двигатели постоянного тока и бесколлекторные двигатели разработаны для регулируемой скорости, серводвигатели разработаны для точного позиционирования.
Оценка характеристик серводвигателей
Серводвигатели оснащены встроенным аппаратным обеспечением для определения положения, что позволяет контроллеру серводвигателя измерять точное угловое положение вала двигателя, также называемое углом поворота. Сочетание точного позиционирования и высокого крутящего момента, предлагаемое серводвигателями, делает их отличным выбором для ряда проектов, связанных с робототехникой.
Сочетание точного позиционирования и высокого крутящего момента, предлагаемое серводвигателями, делает их отличным выбором для ряда проектов, связанных с робототехникой.
Примеры использования серводвигателей в проектах
Лучшие типы проектов для серводвигателей
Шагающий робот
Если вы создаете шагающего робота, имеет ли он две, четыре, шесть или даже большее количество ног, серводвигатели почти наверняка будут выполнять основную работу в вашем проекте.
В шагающих роботах серводвигатели действуют как суставы
В шагающих роботах серводвигатели выступают в качестве суставов (и немного похожи на мышцы, но анатомическая аналогия здесь немного нарушается). Компьютер, на котором работает ваш робот, будет использовать обратную кинематику для вычисления угла, который должен принимать каждый сустав, чтобы выставить робота в определенном положении. Серводвигатели позволяют контроллеру точно управлять углом каждого сустава робота.
Если вы строите шагающего робота, то, скорее всего, вы будете использовать много серводвигателей!
Роботизированные руки
Серводвигатели также полезны для создания роботизированных рук (роботов-манипуляторов). Высокая точность позиционирования, предлагаемая серводвигателями, позволяет микроконтроллеру устанавливать конечный исполнительный механизм манипулятора с высокой степенью точности.
Высокая точность позиционирования, предлагаемая серводвигателями, позволяет микроконтроллеру устанавливать конечный исполнительный механизм манипулятора с высокой степенью точности.
Это робот-манипулятор uArm Metal, работающий на сервоприводах
Серводвигатели также обеспечивают высокий крутящий момент на низких скоростях, благодаря редуктору между двигателем и выходным валом, что позволяет роботам-манипуляторам поднимать тяжелые предметы.
Наконец, сервопривод будет сопротивляться внешним силам, пытающимся изменить положение манипулятора. Например, если вы соберете роботизированную руку и заставите ее пройти дальше точки, которую ищет микроконтроллер, то, как только вы перестанете прикладывать усилие к манипулятору, серводвигатели вернутся в исходное положение.
Шаговые двигатели (описанные в следующем разделе), напротив, не имеют механизма для определения того, изменяют ли их положение внешние силы.
Рулевое управление для радиоуправляемых машин
В радиоуправляемых машинах серводвигатели обычно используются для рулевых механизмов. Поскольку сервоприводы могут быть точно установлены в нужное положение, а затем возвращены в центральное положение, они идеально подходят для рулевого управления. Серводвигатели позволяют управлять всеми видами радиоуправляемых проектов: от рулевых реек на радиоуправляемых машинках, до рулей направления на лодках, до управляющих поверхностей на самолетах.
Поскольку сервоприводы могут быть точно установлены в нужное положение, а затем возвращены в центральное положение, они идеально подходят для рулевого управления. Серводвигатели позволяют управлять всеми видами радиоуправляемых проектов: от рулевых реек на радиоуправляемых машинках, до рулей направления на лодках, до управляющих поверхностей на самолетах.
Шаговые двигатели
Шаговые двигатели, как и серводвигатели, предназначены для построения машин, требующих точных управления и отслеживания позиционирования.
Оценка характеристик шаговых двигателей
То, как шаговые двигатели позволяют управлять позиционированием, сильно отличается от способа, используемого сервоприводами. Серводвигатели имеют возможности абсолютного позиционирования. В любой момент микроконтроллер может сделать запрос контроллеру сервопривода и получить назад значение угла.
Шаговый двигатель, напротив, использует относительное позиционирование. Шаговые двигатели вращаются не непрерывно (как коллекторные двигатели постоянного тока или бесколлекторные двигатели), а дискретными «шагами»,
Типовой шаговый двигатель имеет 200 шагов на полный оборот. Таким образом, каждый раз, когда шаговый двигатель «делает шаг», он поворачивается на 1,8°. Тщательно отслеживая количество шагов, на которое шаговый двигатель повернулся из известного начального положения, микроконтроллер может с высокой степенью точности определять положение двигателя или всего, что к нему прикреплено.
Таким образом, каждый раз, когда шаговый двигатель «делает шаг», он поворачивается на 1,8°. Тщательно отслеживая количество шагов, на которое шаговый двигатель повернулся из известного начального положения, микроконтроллер может с высокой степенью точности определять положение двигателя или всего, что к нему прикреплено.
Примеры использования шаговых двигателей в проектах
Лучшие типы проектов для шаговых двигателей
3D принтеры
Шаговые двигатели используются практически во всех настольных 3D принтерах. Эта технология двигателей позволяет контроллерам 3D принтеров отслеживать положение печатающей головки с точностью до минуты (обычно в масштабе микрометров). Кроме того, шаговые двигатели обеспечивают высокий крутящий момент на низких скоростях, что полезно для перемещения тяжелого экструдера вокруг рабочей области.
3D принтеры используют шаговые двигатели для отслеживания положения печатающей головки
Станки ЧПУ
По причинам, аналогичным 3D принтерам, шаговые двигатели широко используются в станках ЧПУ.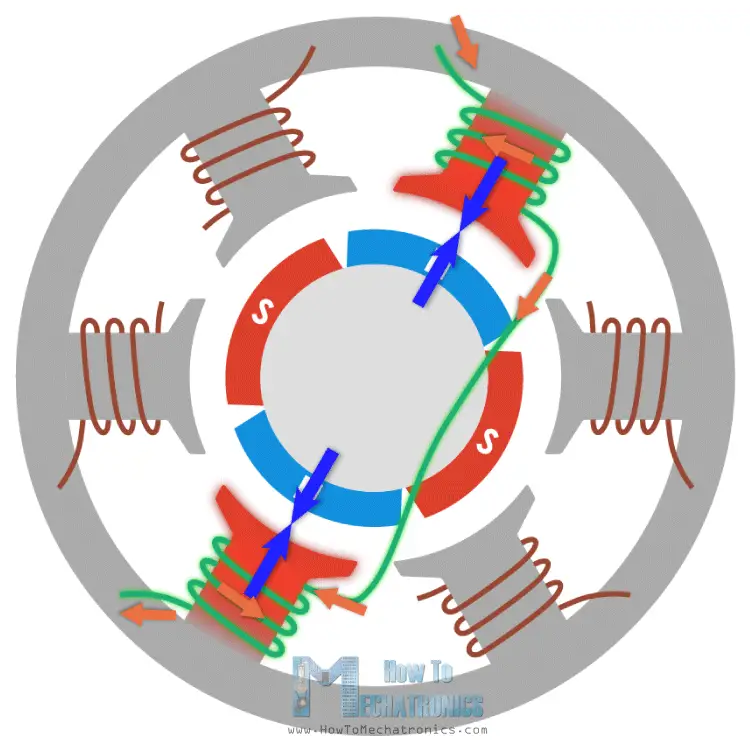 Станок с ЧПУ запускает задание с известной нулевой позиции. Контроллер подсчитывает количество шагов, на которое перемещаются двигатели, переводя их в расстояния в соответствие с конструкцией ремней, которыми управляют шаговые двигатели. Этот тип отслеживания положения обеспечивает высокий уровень точности размеров обрабатываемых станком ЧПУ деталей.
Станок с ЧПУ запускает задание с известной нулевой позиции. Контроллер подсчитывает количество шагов, на которое перемещаются двигатели, переводя их в расстояния в соответствие с конструкцией ремней, которыми управляют шаговые двигатели. Этот тип отслеживания положения обеспечивает высокий уровень точности размеров обрабатываемых станком ЧПУ деталей.
Большие роботы-манипуляторы
В предыдущем разделе объяснялось, как в более мелких роботах манипуляторах используются серводвигатели. В более крупных роботах манипуляторах часто используются шаговые двигатели. Таким образом, если вы разрабатываете робота-манипулятора, который должен будет перемещать тяжелые грузы, дополнительный крутящий момент больших шаговых двигателей по сравнению с крутящим моментом, обеспечиваемым серводвигателями, позволит вашему роботу-манипулятору поднимать и перемещать гораздо более тяжелые объекты.
Шаговые двигатели хорошо работают в больших роботах-манипуляторах, которые требуют возможности подъема более тяжелых объектов
Оригинал статьи:
- Scott Hatfield. What Type of Motor is Best for My Project?
 What Type of Motor is Best for My Project?
What Type of Motor is Best for My Project?Теги
Бесколлекторный двигательДвигательДвигатель постоянного токаКоллекторный двигатель постоянного токаШаговый двигательЭлектродвигатель
Новый компактный бесколлекторный электродвигатель | Наука и жизнь
В России запатентован новый электродвигатель необычной шарообразной конструкции. Его первые натурные испытания прошли успешно, двигатель использовался как лодочный мотор. Изобретатели уверены, что в будущем новый высокопроизводительный электродвигатель найдёт широкое применение.
Популярность электромобилей, электроскутеров, промышленных квадрокоптеров и других полезных устройств с электрическим двигателем стремительно растёт. Вместе с ними на рынок приходят всё более совершенные и компактные конструкции электродвигателей, которые способствуют тому, что электротранспорт становится более доступным для населения.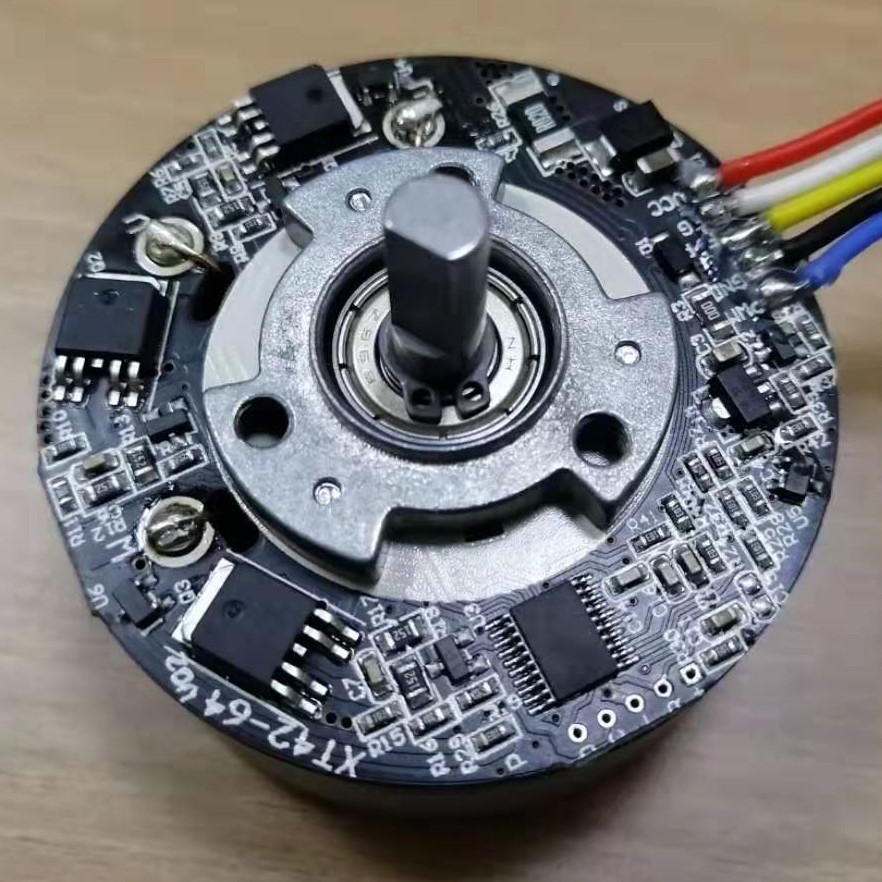
В 2020 году изобретатель Рубен Даниэльевич Меджлумян запатентовал (RU 2 726 153 C1) в России высокопроизводительный бесколлекторный электродвигатель. Он более лёгкий и компактный по сравнению с коллекторными двигателями такой же мощности при том же крутящем моменте на валу. Необычная шарообразная форма обеспечивает эффективное взаимодействие магнитных полей статора и ротора. Автор изобретения – россиянин, а в США эти электродвигатели продаются под торговой маркой «HELV Motors».
Бесколлекторный двигатель с редуктором
В последнее время активно возрос интерес к бесколлекторным или, как их ещё называют, «бесщёточным» двигателям постоянного тока, обеспечивающим более надежную, эффективную и менее шумную работу. В коллекторных двигателях постоянного тока ток передаётся на вращающуюся часть мотора (ротор) с помощью скользящих по коллектору контактов – щёток. Щётки со временем изнашиваются и могут вызвать искрение. Поэтому коллекторный двигатель не следует использовать для работ, где требуется длительный срок эксплуатации и надежность. Конструкция коллектора также увеличивает размеры и массу мотора.
Конструкция коллектора также увеличивает размеры и массу мотора.
Заявленный компанией двигатель мощностью 60 кВт будет весить не больше 9.7 кг, а диаметр не превысит 22 сантиметров. Скорость вращения топовой модификации двигателя составляет 30 000 оборотов в минуту при напряжении в 400 вольт, а пиковая мощность электродвигателя в линейке продукции – 95 кВт.
В частности, мотор диаметром 119 мм и массой 2.5 кг при мощности электродвигателя 1.5 кВт создаёт крутящий момент на валу 32 кгс при частоте вращения 3 700 оборотов в минуту.
Такие характеристики дают возможность устанавливать его на электромотоциклы, квадрокоптеры и даже на электромобили. Натурные испытания были проведены в 2020 году на реке Волга, где электродвигатель использовался в качестве лодочного мотора.
Лодочный мотор в корпусе
Конструкция электродвигателя выглядит следующим образом. Неподвижная наружная часть двигателя (статор) выполнена в виде сферы, на которую слоями намотаны катушки электромагнитов. Их полюса равномерно смещены относительно друг друга. Для компактности обмотка может быть выполнена из плоского провода в виде ленты, покрытой изоляцией. Ротор выполнен в виде вала с жёстко закреплённым на нём постоянным магнитом, вектор магнитного поля которого ориентирован перпендикулярно валу. Ось симметрии статора совпадает с осью вращения вала. Такая конструкция помимо уменьшения размеров обеспечивает эффективное взаимодействие магнитных полей электромагнитов статора и постоянного магнита ротора, что увеличивает силу взаимодействия и надежность за счет более плавного вращения ротора, особенно при больших оборотах.
Неподвижная наружная часть двигателя (статор) выполнена в виде сферы, на которую слоями намотаны катушки электромагнитов. Их полюса равномерно смещены относительно друг друга. Для компактности обмотка может быть выполнена из плоского провода в виде ленты, покрытой изоляцией. Ротор выполнен в виде вала с жёстко закреплённым на нём постоянным магнитом, вектор магнитного поля которого ориентирован перпендикулярно валу. Ось симметрии статора совпадает с осью вращения вала. Такая конструкция помимо уменьшения размеров обеспечивает эффективное взаимодействие магнитных полей электромагнитов статора и постоянного магнита ротора, что увеличивает силу взаимодействия и надежность за счет более плавного вращения ротора, особенно при больших оборотах.
Как работает такой бесколлекторный электродвигатель? При подаче напряжения на одну из катушек статора она превращается в электромагнит, который, взаимодействуя с постоянным магнитом ротора, приводит его в движение. По мере поворота ротора питание контроллером переключается поочерёдно на следующую катушку, магнитные полюса которой смещены относительно предыдущей. Это приводит к непрерывному вращению ротора. В случае одной катушки в нужный момент времени производится переключение полярности полюсов электромагнита.
Это приводит к непрерывному вращению ротора. В случае одной катушки в нужный момент времени производится переключение полярности полюсов электромагнита.
Использование нескольких обмоток обеспечивает бОльшую равномерность вращения. При этом увеличение количества катушек свыше 12 нецелесообразно, поскольку увеличивает массу и размеры мотора без существенного повышения крутящего момента. Конкретное количество катушек выбирается исходя из требований на габариты мотора.
Процесс намотки катушки мотора.
Из-за явления электромагнитной индукции переменное магнитное поле порождает в металлических деталях токи Фуко (вихревые индукционные токи), приводящие к их нагреву и потере энергии. Чтобы уменьшить этот нежелательный эффект, статоры синхронных и асинхронных электрических моторов изготовлены из набора изолированных между собой пластин из тонкого железа.
Компания «Buddha Energy Inc.» пошла иным путём и разработала корпус статора электродвигателя «HELV Motors» из композитных материалов, что позволило не только убрать эффект токов Фуко, но и уменьшить вес двигателя. Кроме этого, композитный материал статора позволяет легко придавать ему нужную форму без использования дорогостоящего оборудования для обработки металла. Это тоже снижает стоимость электродвигателя.
Кроме этого, композитный материал статора позволяет легко придавать ему нужную форму без использования дорогостоящего оборудования для обработки металла. Это тоже снижает стоимость электродвигателя.
Любопытно, что идея создания сферического электродвигателя родилась не на базе теоретических изысканий, а на основе экспериментальной проверки взаимодействий магнитных полей ротора и статора. Расчет точного взаимодействия магнитных полей внутри композитов – задача непростая. Но команда проекта нашла свой оригинальный, нестандартный подход. На 3D-принтере был напечатан лабораторный стенд, на котором и проводились испытания нескольких десятков вариантов обмоток статора. В результате был найден вариант, который удерживал ротор наилучшим образом. Всё остальное было делом техники.
3D-модель первого лабораторного стенда
При механическом раскручивании вала извне, например, ветряком, водяной турбиной, двигателем автомобиля или любым другим устройством данный электродвигатель переходит в режим генератора и выдает электроэнергию, которая может быть накоплена или потреблена внешними устройствами.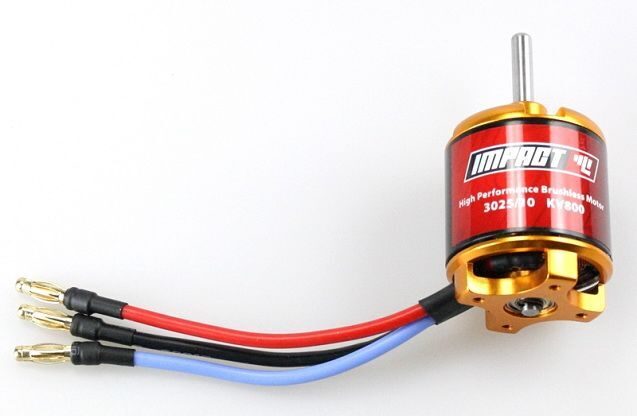
Компания «Buddha Energy Inc.» пока не предоставила информацию о точной дате старта продаж двигателей «HELV Motors» в России, но есть надежда, что электродвигатели станут доступны на рынке в третьем квартале 2021 года.
E-mail: [email protected]
На правах рекламы
В чем разница между бесщеточным и щеточным двигателем?
Бесщеточные и щеточные двигатели, по существу, выполняют одну и ту же функцию. Они преобразуют электрический ток во вращательное движение.
В то время как коллекторные двигатели доступны уже более 100 лет, бесщеточные двигатели появились в 1960-х годах, когда твердотельная электроника сделала возможным их проектирование. Только в 1980-х годах бесщеточные двигатели стали более распространенными в инструментах и электронике. Сегодня обе конструкции используются во всем мире для бесконечных приложений.
Механический и электронный привод
Основное различие между щеточными и бесщеточными двигателями заключается в том, что щеточные двигатели имеют механический привод, а бесщеточные — электронный.
В щеточных двигателях , статор (неподвижная часть) содержит постоянные магниты, а ротор (подвижная часть) содержит электромагниты. Угольные щетки при физическом контакте с коммутатором в роторе передают на него электрическое напряжение. Это напряжение создает электромагнитное поле в роторе. Постоянно меняя полярность магнитного поля через коммутатор, достигается вращательное движение. Конструкция проста, но имеет свои недостатки:
- Меньшая эффективность
- Более горячая
- Меньший срок службы
- Требует больше обслуживания
В бесколлекторных двигателях все наоборот. Ротор содержит постоянные магниты, а статор создает электромагнитное поле. Вместо щеток электронный контроллер создает трехфазный переменный ток, который последовательно питает катушки двигателя. Это формирует вращающееся магнитное поле в статоре, которое питает магниты ротора и создает вращательное движение.
Есть несколько недостатков бесщеточной конструкции:
- Требуется электронный контроллер
- Более дорогой
- Более сложный
Что лучше: щеточный или бесщеточный?
Обе конструкции имеют свои преимущества, и ни одна из них не обязательно лучше. Когда дело доходит до этого, стоимость, вероятно, является самым важным фактором. Коллекторные двигатели производятся серийно и дешевле. Преимущества коллекторных двигателей помимо цены:
Когда дело доходит до этого, стоимость, вероятно, является самым важным фактором. Коллекторные двигатели производятся серийно и дешевле. Преимущества коллекторных двигателей помимо цены:
- Простота в эксплуатации
- Надежный
- Доступен во многих размерах и номиналах
- Простое управление
- Подходит для более низких рабочих циклов
Если ваше приложение требует более высокого уровня контроля, а полезность перевешивает затраты, бесщеточный двигатель может быть лучшим вариантом. Преимущества бесщеточных технологий:
- Точное регулирование скорости
- Лучше подходит для непрерывных или длительных рабочих циклов
- Более длительный срок службы
- Меньше обслуживания
- Высокая эффективность
Хотя можно использовать контроллер на щеточном двигателе, стоимость может сделать бесщеточный двигатель лучшим вариантом.
Щеточные или бесщеточные варианты для вашего применения
Есть вопросы? Мы знаем электрические двигатели.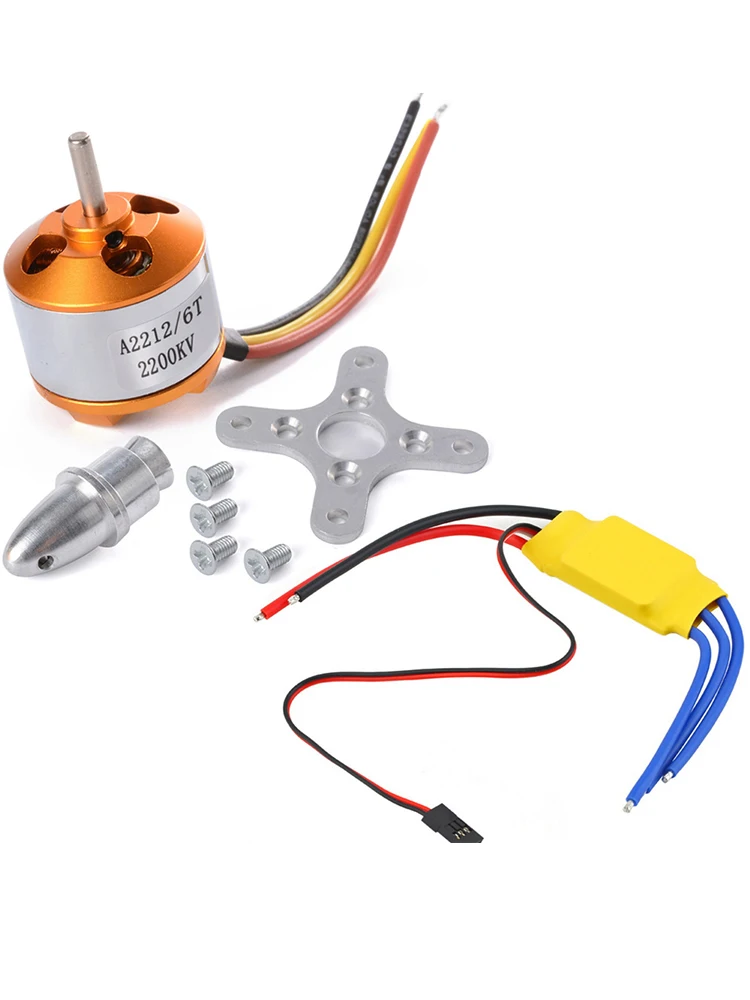 Свяжитесь с одним из наших компетентных торговых представителей, чтобы узнать больше. Позвольте нам подобрать для вас электродвигатель, который лучше всего подходит для вашего применения и вашего бюджета. Мы поставляем двигатели на заказ вовремя уже более тридцати лет. Звоните 763-383-6936 или свяжитесь с нами сегодня.
Свяжитесь с одним из наших компетентных торговых представителей, чтобы узнать больше. Позвольте нам подобрать для вас электродвигатель, который лучше всего подходит для вашего применения и вашего бюджета. Мы поставляем двигатели на заказ вовремя уже более тридцати лет. Звоните 763-383-6936 или свяжитесь с нами сегодня.
Этот веб-сайт использует файлы cookie для улучшения вашего опыта. Мы предполагаем, что вы согласны с этим, но вы можете отказаться, если хотите. Настройки файлов cookieПРИНЯТЬ
Разница между щеточными и бесщеточными двигателями
– Progressive Automations
Ежедневно машины и орудия в нашем окружении часто используют щеточные и бесщеточные двигатели постоянного тока для обеспечения вращательного движения. Оба мотора внешне могут выглядеть одинаково, однако их конструкция и работа сильно различаются. Чтобы получить наилучшие результаты, важно выбрать правильный двигатель и обеспечить правильную конфигурацию для вашего приложения. В этой статье мы рассмотрим разницу между щеточными и бесщеточными двигателями, чтобы лучше понять, какой двигатель наиболее подходит для их применения. Мы также покажем, как подключить щеточные и бесщеточные электродвигатели к кулисным переключателям в целях тестирования.
Мы также покажем, как подключить щеточные и бесщеточные электродвигатели к кулисным переключателям в целях тестирования.
Просмотрите все наши электрические линейные приводы, от микро до промышленных!
Коллекторный двигатель постоянного тока
Коллекторный двигатель постоянного тока состоит из нескольких основных компонентов, которые в сочетании с источником питания постоянного тока создают вращающийся двигатель. Конфигурацию якоря, коммутатора, щеток и магнита возбуждения можно увидеть на рисунке 1 ниже.
Рис. 1. Чертеж (слева) и фактический пример (справа) коллекторных двигателей постоянного тока
На нашем чертеже показан упрощенный якорь, чтобы было легче увидеть протекающий через него ток; однако щеточные двигатели постоянного тока будут иметь несколько обмоток катушки с якорем. Щетки заряжают коммутатор, который пропускает ток через якорь в противоположной полярности постоянного магнита. Это заставляет якорь вращаться от притяжения магнитов.
Это заставляет якорь вращаться от притяжения магнитов.
Коллекторные двигатели постоянного тока просты в эксплуатации, поскольку являются одними из самых простых типов двигателей, однако их срок службы короче, чем у бесщеточных двигателей. Из-за того, что щетки имеют физический контакт с коллектором, искрение является распространенной проблемой для щеточных двигателей. Этот физический контакт также со временем изнашивает щетки и приводит к некоторой потере энергии из-за возникающего трения.
Выберите правильную систему управления для вашего привода из нашего большого ассортимента!
Контроллер бесщеточного двигателя постоянного тока
Бесщеточный двигатель постоянного тока (BLDC) устраняет основные недостатки его щеточного аналога. Двигатель состоит из постоянных магнитов и катушек, которые через серию идеально синхронизированных интервалов подачи питания заставляют постоянный магнит в центре вращаться вокруг катушек, окружающих его. Мы включили схему бесщеточного двигателя для справки на рис. 2 ниже.
Мы включили схему бесщеточного двигателя для справки на рис. 2 ниже.
Рисунок 2: Чертеж (слева) и фактический пример (справа) бесколлекторных двигателей постоянного тока
На катушки бесщеточного двигателя подается питание в определенной последовательности (рис. 3), что приводит к вращению постоянных магнитов на роторе. Это делается без какого-либо физического контакта и позволяет использовать более эффективный и долговечный двигатель постоянного тока.
Рис. 3. Последовательность подачи питания на катушки
Чтобы обеспечить результат, показанный на Рис. 3, бесщеточному двигателю постоянного тока требуется электронный блок управления (ЭБУ), определяющий положение ротора и катушки, на которые подается питание.
В отличие от коллекторных двигателей постоянного тока, для вращения которых требуется напряжение 12 В постоянного тока, приложенное непосредственно к двигателю, для бесщеточных двигателей постоянного тока требуется трехфазное питание. Это означает, что контроллер бесщеточного двигателя постоянного тока должен выдавать соответствующую мощность на различные катушки для обеспечения вращения. При использовании нашего контроллера бесщеточного двигателя постоянного тока LC-241 на входные клеммы можно подать напряжение постоянного тока 12 В при токе 5 А с помощью источника питания. Затем он преобразуется в 3-фазное питание для управления нашими бесколлекторными моторами. В следующем разделе базовая схема подключения поможет при тестировании бесщеточного привода постоянного тока.
Это означает, что контроллер бесщеточного двигателя постоянного тока должен выдавать соответствующую мощность на различные катушки для обеспечения вращения. При использовании нашего контроллера бесщеточного двигателя постоянного тока LC-241 на входные клеммы можно подать напряжение постоянного тока 12 В при токе 5 А с помощью источника питания. Затем он преобразуется в 3-фазное питание для управления нашими бесколлекторными моторами. В следующем разделе базовая схема подключения поможет при тестировании бесщеточного привода постоянного тока.
Подключение бесщеточных двигателей к кулисным переключателям
Progressive Automations в настоящее время предлагает мини-линейный привод PA-14 в варианте бесщеточного постоянного тока для индивидуальных заказов. Схема подключения бесщеточных приводов PA-14 показана на рисунке 4 ниже.
Рис. 4. Схема подключения бесщеточного привода PA-14
Шаг 1
Подсоедините 3 провода контроллера двигателя от бесщеточного привода PA-14 к контроллеру бесщеточного двигателя постоянного тока LC-241. Провода обычно зеленого, синего и белого цвета, которые подключаются к клеммам U, V и W соответственно. Убедитесь, что соединения бесщеточного двигателя надежно закреплены. Если провода разного цвета, подключение их в неправильном порядке просто приведет к перемещению электрического линейного привода в направлении, противоположном предполагаемому.
Провода обычно зеленого, синего и белого цвета, которые подключаются к клеммам U, V и W соответственно. Убедитесь, что соединения бесщеточного двигателя надежно закреплены. Если провода разного цвета, подключение их в неправильном порядке просто приведет к перемещению электрического линейного привода в направлении, противоположном предполагаемому.
Шаг 2
Подключите контакт SPD к земле источника питания 12 В постоянного тока, чтобы включить встроенный потенциометр для управления скоростью. Убедитесь, что этот потенциометр повернут по часовой стрелке на полную скорость.
Шаг 3
Подключите контакт GND к контактам Common на кулисном переключателе.
Шаг 4
Подсоедините контакт RUN к обеим сторонам тумблера. Это важно, так как и вперед, и назад для работы требуется, чтобы контакт RUN контактировал с землей.
Шаг 5
Подсоедините контакт REV к одной стороне кулисного переключателя. Эта сторона будет обратной стороной тумблера.
Шаг 6
Подайте 12 В постоянного тока на контроллер бесщеточного двигателя постоянного тока, при первом включении питания слышен шум индикатора.
Рис. 5. Физическая проводка бесщеточного привода PA-14
Базовая настройка завершена; с помощью кулисного переключателя привод можно выдвигать и втягивать. Проблема с приводом бесщеточного двигателя постоянного тока заключается в том, что внутренние концевые выключатели не могут остановить подачу питания к приводу, как это происходит с щеточными двигателями постоянного тока. Это связано с тем, что на бесколлекторный двигатель PA-14 подается трехфазное питание. Бесколлекторный электропривод PA-14 оснащен встроенным концевым выключателем с обратной связью, который можно использовать с ПЛК или микроконтроллером для индикации того, что привод находится в конце хода. Обратная связь действует как переключатель с нормально замкнутого на нормально открытый, что необходимо для интеграции бесщеточного привода PA-14 в реальные приложения.
У нас также есть статья о непрерывном удлинении и втягивании хода привода с бесщеточным двигателем постоянного тока для справки с примерами кодирования.
Подключение щеточных двигателей к кулисным переключателям
Большинство наших электрических линейных приводов поставляются с щеточными двигателями постоянного тока. Простота эксплуатации коллекторных двигателей постоянного тока позволяет подключать кулисные переключатели между источником питания постоянного тока и коллекторным двигателем без необходимости в дополнительном контроллере.
Рисунок 6: Схема подключения кулисного переключателя к приводу с щеточным двигателем подключен к земле блока питания. Этот тип проводки выключателя привода позволяет оператору изменять направление потока электрического тока, поступающего в привод, для изменения направления движения. В качестве физического примера схемы подключения исполнительного механизма с кулисным переключателем это видео является отличным примером. Рис. 7. Физическая проводка кулисного переключателя к приводу с коллекторным двигателем Хотите внедрить автоматизацию в свой дом? Взгляните на наши продукты для домашней автоматизации! Коллекторные двигатели постоянного тока имеют катушки в центре, вращающиеся вокруг постоянных магнитов, в то время как бесщеточные двигатели постоянного тока имеют в центре постоянный магнит, который вращается вокруг катушек. Конструкция бесщеточного двигателя лучше подходит для приложений, которые будут использовать его более длительный срок службы и большую энергоэффективность. Для более простой и легкой работы в приложениях с коротким временем цикла можно воспользоваться удобной конструкцией коллекторных двигателей постоянного тока. Если у вас есть какие-либо вопросы или вы хотите обсудить наши продукты, пожалуйста, не стесняйтесь обращаться к нам! Мы являемся экспертами в том, что мы делаем, и хотим, чтобы вы нашли лучшее решение для вашего приложения.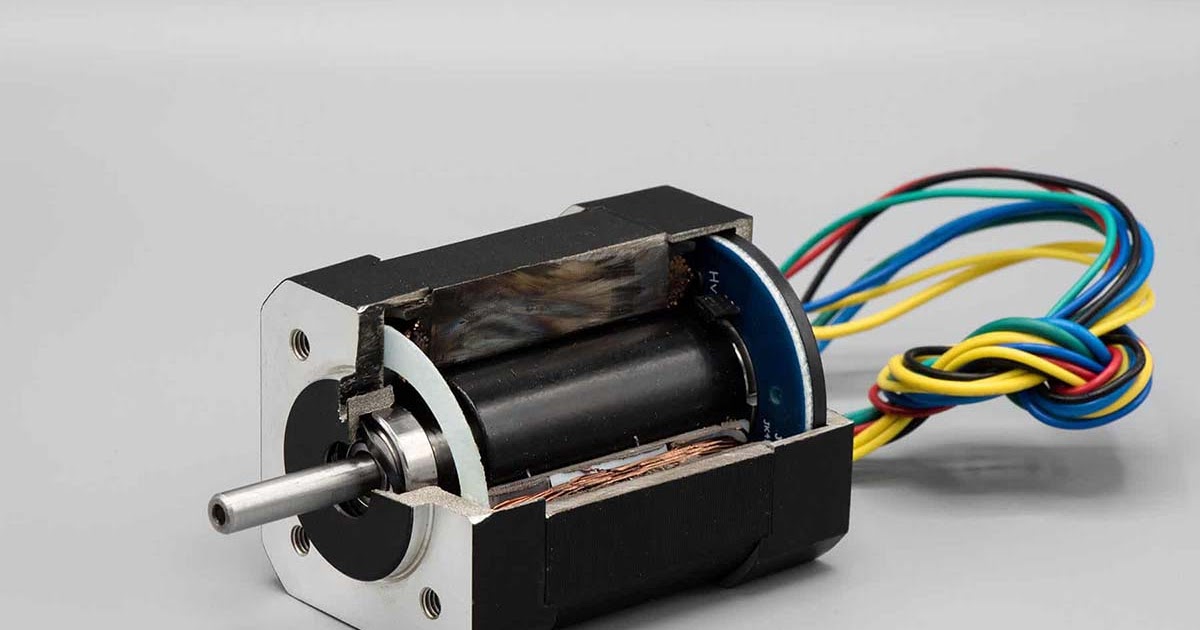
Резюме
