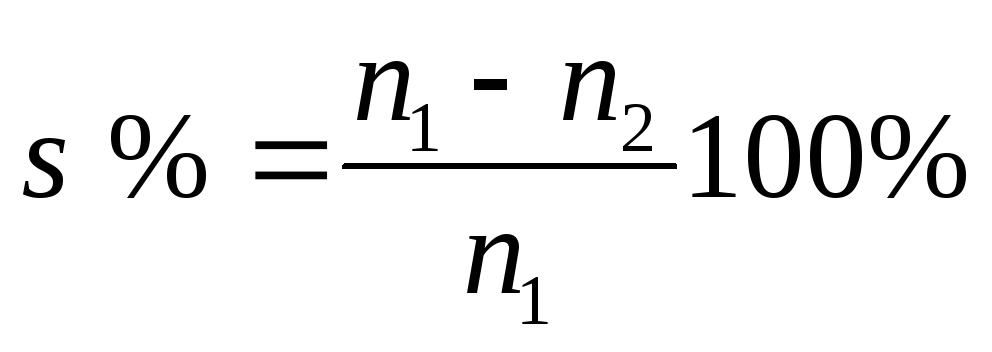
Вращающий момент возрастает в соответствии с характеристикойM=f(s). При критическом скольженииSкpмомент достигает максимального значения Ммах. С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент М начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х. х. Мо и полезного нагрузочного моментаM2. При достижении электромагнитным моментом максимального значения наступает предел устойчивой работы асинхронного двигателя.Следовательно, для устойчивой работы двигателя необходимо, чтобы сумма нагрузочных моментов, действующих на ротор, была меньше максимального момента: Мст = Мо + М2 < Ммах. Но чтобы работа асинхронного двигателя была надежной и чтобы случайные кратковременные перегрузки не вызывали остановок двигателя, необходимо, чтобы он обладал перегрузочной способностью. Перегрузочная способность двигателя определяется отношением максимального момента Ммах к номинальномуMном. Для асинхронных двигателей общего назначения перегрузочная способность составляет Ммах/Мном = 1,7 — 2,5.
 Частота вращения ротора асинхронного двигателя
Частота вращения ротора асинхронного двигателя
Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой-либо из трех величин: скольжения s, частоты тока в обмотке статораf1или числа полюсов в обмотке статора 2р.Регулированиечастоты вращения изменением скольжения s возможно следующими способами: изменением подводимого к обмотке статора напряжения, нарушением симметрии этого напряжения.
Р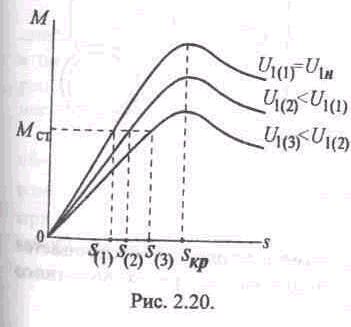
 егулирование частоты вращения изменением подводимого напряжения.Вращающий момент АД пропорционален
егулирование частоты вращения изменением подводимого напряжения.Вращающий момент АД пропорционален  ,поэтому механические характеристики двигателя при напряжениях меньших номинального располагаются ниже естественной. Если статический моментМСТостается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается. Регулирование скольжения этим способом возможно в пределах 0 <s < sКР. Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольжения. С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД. С уменьшением напряженияU1двигатель утрачивает перегрузочную способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД. Узкий диапазон регулирования и неэкономичность – недостатки. Регулирование частоты вращения нарушением симметрии подводимого напряжения.При нарушении симметрии трехфазной системы переменного напряжения, подводимой к АД, вращающееся магнитное поле статора становится эллиптическим. Такое поле содержит обратную составляющую (встречное поле), которая создает момент Мобр, направленный встречно вращающему моменту Мпр, поэтому результирующий электромагнитный момент АД уменьшается:
,поэтому механические характеристики двигателя при напряжениях меньших номинального располагаются ниже естественной. Если статический моментМСТостается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается. Регулирование скольжения этим способом возможно в пределах 0 <s < sКР. Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольжения. С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД. С уменьшением напряженияU1двигатель утрачивает перегрузочную способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД. Узкий диапазон регулирования и неэкономичность – недостатки. Регулирование частоты вращения нарушением симметрии подводимого напряжения.При нарушении симметрии трехфазной системы переменного напряжения, подводимой к АД, вращающееся магнитное поле статора становится эллиптическим. Такое поле содержит обратную составляющую (встречное поле), которая создает момент Мобр, направленный встречно вращающему моменту Мпр, поэтому результирующий электромагнитный момент АД уменьшается: . Механические характеристики двигателя в этом случае располагаются в интервале между характеристикой при симметричном напряжении (1) и характеристикой при однофазном питании (2) - пределом несимметрии 3-х фазногоU. Регулировка несимметрии подводимого напряжения обеспечивается включением в одну из фаз однофазного регулировочного автотрансформатораAT.
. Механические характеристики двигателя в этом случае располагаются в интервале между характеристикой при симметричном напряжении (1) и характеристикой при однофазном питании (2) - пределом несимметрии 3-х фазногоU. Регулировка несимметрии подводимого напряжения обеспечивается включением в одну из фаз однофазного регулировочного автотрансформатораAT.
Недостатками этого способа регулирования являются узкий диапазон регулирования и уменьшение КПД двигателя при увеличении несимметрии напряжения.
Р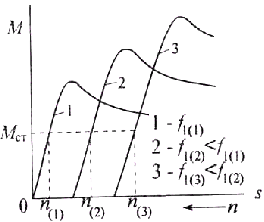
 егулирование частоты вращения изменением частоты тока в обмотке статора. Это способ регулирования основан на изменении синхронной частоты вращения
егулирование частоты вращения изменением частоты тока в обмотке статора. Это способ регулирования основан на изменении синхронной частоты вращения  ,что возможно при наличии источника питания АД с регулируемой частотой -преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне. Чтобы регулировать частоту вращения, достаточно изменить частоту токаf1, но при этом будет изменяться и максимальный электромагнитный момент АД.Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частотыf1изменять и величину подводимого к обмотке статора напряженияU1. Если частота вращения ротора АД регулируется при постоянном моменте нагрузки
,что возможно при наличии источника питания АД с регулируемой частотой -преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне. Чтобы регулировать частоту вращения, достаточно изменить частоту токаf1, но при этом будет изменяться и максимальный электромагнитный момент АД.Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частотыf1изменять и величину подводимого к обмотке статора напряженияU1. Если частота вращения ротора АД регулируется при постоянном моменте нагрузки ,то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока:
,то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока:  . При осуществлении этого закона регулирования основной магнитный поток АД при различных значениях частотыf1, остается неизменным, а мощность двигателя увеличивается пропорционально нарастанию частоты вращения.Еслирегулирование производится при условии постоянства мощности двигателя
. При осуществлении этого закона регулирования основной магнитный поток АД при различных значениях частотыf1, остается неизменным, а мощность двигателя увеличивается пропорционально нарастанию частоты вращения.Еслирегулирование производится при условии постоянства мощности двигателя  ,то подводимое напряжение к обмотке статора следует изменять в соответствии с законом
,то подводимое напряжение к обмотке статора следует изменять в соответствии с законом 
Р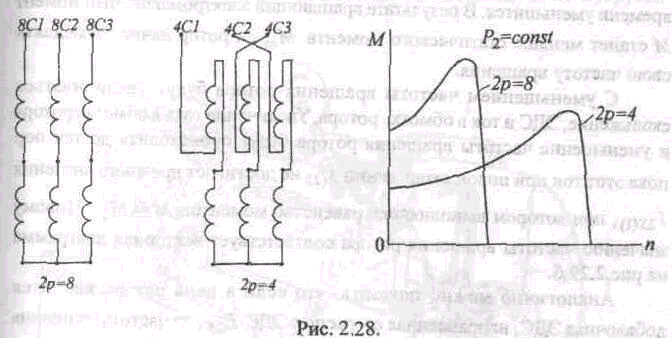 егулирование частоты вращения изменением числа полюсов обмотки статора.Этот способ регулирования частоты вращения обеспечивает ступенчатую регулировку. Изменять число полюсов обмотки статора можно либо укладкой в пазах статора двух обмоток с разным числом полюсов, либо укладкой одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Второй способ получил наибольшее применение. АД с полюсно-переключаемыми обмотками могут работать в двух режимах: режим постоянного момента, когда при переключении обмотки статора с одной полюсности на другую вращающий момент на валу двигателяМ2остается неизменным, а мощность Р2 изменяется пропорционально частоте вращения ротора
егулирование частоты вращения изменением числа полюсов обмотки статора.Этот способ регулирования частоты вращения обеспечивает ступенчатую регулировку. Изменять число полюсов обмотки статора можно либо укладкой в пазах статора двух обмоток с разным числом полюсов, либо укладкой одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Второй способ получил наибольшее применение. АД с полюсно-переключаемыми обмотками могут работать в двух режимах: режим постоянного момента, когда при переключении обмотки статора с одной полюсности на другую вращающий момент на валу двигателяМ2остается неизменным, а мощность Р2 изменяется пропорционально частоте вращения ротора . Режим постоянной мощности, когда при переключении обмотки статора с одной полюсности на другую мощность Р2остается примерно одинаковой, а момент на валуМ2изменяется соответственно изменению частоты вращения ротора
. Режим постоянной мощности, когда при переключении обмотки статора с одной полюсности на другую мощность Р2остается примерно одинаковой, а момент на валуМ2изменяется соответственно изменению частоты вращения ротора .
.
studfiles.net

При пуске АД должны соблюдаться следующие требования:
1) АД должен развивать достаточно большой пусковой момент, достаточный для преодоления статического момента сопротивления на валу.
2) Величина пускового тока должна быть ограничена такой величиной, чтобы не происходило повреждения АД и нарушения нормального режима работы сети.
3) Схема пуска должна быть по возможности простой, а количество и стоимость пусковых устройств – малыми.
Пуск АД с фазным ротором с помощью пускового реостата применяются значительно реже двигателей с КЗ ротором, и они используются в следующих случаях:
1) Когда АД с КЗ ротором неприемлемы по условиям регулирования их скорости вращения;
2) Когда приводимые в движение массы настолько велики, что выделяемая во вторичной обмотки двигателя тепловая энергия вызывает недопустимый нагрев омотки ротора в виде беличьей клетки;
Помимо пусковых значений тока и момента пусковые свойства двигателей оцениваются еще и такими показателями: продолжительность и плавность пуска, сложность пусковой операции, ее экономичность (стоимость и надежность пусковой аппаратуры и потери энергии в ней). Наличие контактных колец у двигателей с фазным ротором позволяет подключить к обмотке ротора пусковой реостат (ПР). При этом активное сопротивление цепи ротора увеличивается до значения R2=r2’+rд’, гдеrд’— электрическое сопротивление пускового реостата, приведенное к обмотке статора.
Пусковые свойства двигателя определяются в первую очередь значением пускового тока Iпили его кратностьюIП/Iноми значением пускового моментаМпили его кратностьюМп/МНОМ.В начальный момент пуска скольжениеs=l, поэтому, пренебрегая токомхх, пусковой ток можно определить:
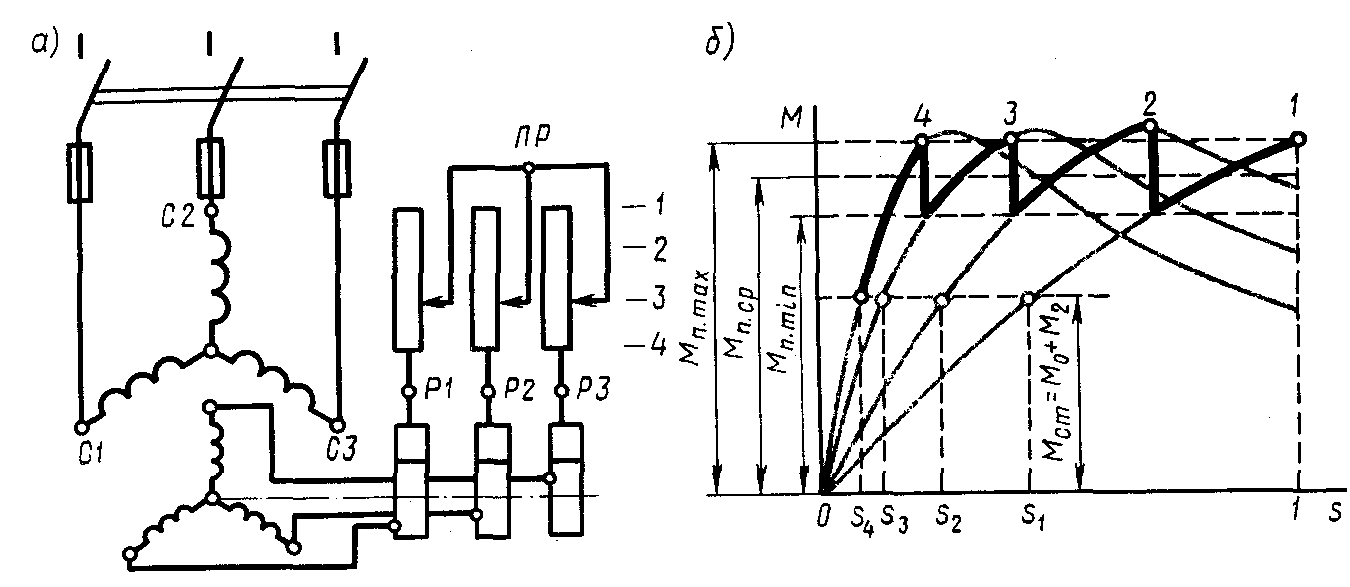
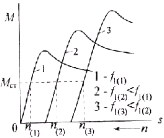
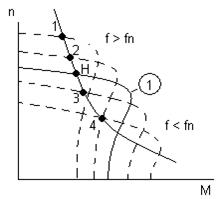
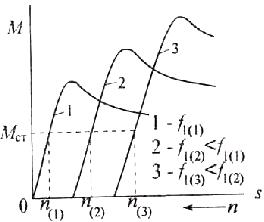
В процессе пуска двигателя ступени ПР переключают таким образом, чтобы ток ротора оставался приблизительно неизменным, а среднее значение пускового момента было близко к наибольшему. Так, в начальный момент пуска (первая ступень реостата) пусковой момент равен Мпмакс. По мере разгона АД его момент уменьшается по кривой 1. Как только значение момента уменьшится до значения Mпmin, рычаг реостата переводят на вторую ступень и сопротивление реостата уменьшается. Теперь зависимость М=f(s) выражается кривой 2 и пусковой момент двигателя вновь достигает Мпмакс. Затем ПР переключают на третью и на четвертую ступени (кривые 3 и 4). После того как электромагнитный момент двигателя уменьшится до значения, равного значению противодействующего момента на валу двигателя, частота вращения ротора достигнет установившегося значения и процесс пуска двигателя будет закончен. В течение всего процесса пуска значение пускового момента остается приблизительно постоянным, равным Мп.ср. Следует иметь в виду, что при слишком быстром переключении ступеней реостата пусковой ток может достигнуть недопустимо больших значений.
Частота вращения ротора асинхронного двигателя 
Из этого выражения следует, что частоту вращения ротора для фазных АД можно использовать все те же способы регулирования, как и для АД с кз ротором:
регулирование частоты вращения изменением подводимого напряжения, нарушением симметрии подводимого напряжения, изменением частоты тока в обмотке статора, изменением числа полюсов обмотки статора. Ниже рассмотрим способы специфичные для АД с фазным ротором.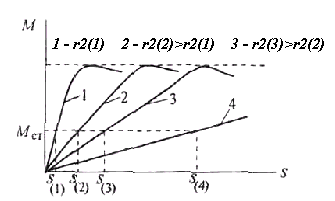
Регулирование частоты вращения изменением активного сопротивления в цепи ротора.
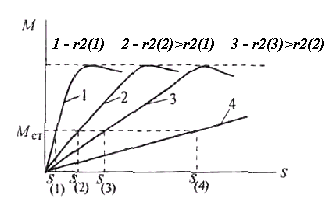
В цепь ротора включается регулировочный реостат, подобный пусковому, но рассчитанный на длительный режим работы. Мех. Хар-ки АД при различных значениях активного сопротивления цепи ротора показывают, что с увеличением активного сопротивления цепи ротора возрастает скольжение, соответствующее заданному статическому моменту. Частота вращения ротора при этом уменьшается. Способ обеспечивает регулирование частоты вращения в широком диапазоне вниз от синхронной частоты вращения. Электрические потери в цепи ротора возрастают, но только из-за потерь в регулировочном реостате.
Регулирование частоты вращения введением в цепь ротора добавочной ЭДС.
В цепь ротора вводят от постороннего источника добавочную ЭДС, имеющую частоту, одинаковую с основной ЭДС ротора, и направленную согласно или встречно с ней. При введении в цепь вращающегося ротора добавочной ЭДС  , направленной встречно ЭДС
, направленной встречно ЭДС , ток в обмотке ротора в первый момент времени уменьшится. В результате вращающий электромагнитный момент М станет меньше статического момента Мст и ротор начнет замедлять свою частоту вращения. Аналогично можно показать, что если в цепь ротора вводится добавочная ЭДС, направленная согласно с ЭДС
, ток в обмотке ротора в первый момент времени уменьшится. В результате вращающий электромагнитный момент М станет меньше статического момента Мст и ротор начнет замедлять свою частоту вращения. Аналогично можно показать, что если в цепь ротора вводится добавочная ЭДС, направленная согласно с ЭДС  , то частота вращения ротора увеличивается. Таким образом, при наличии соответствующего источника (преобразователя частоты), включенного в цепь ротора, можно плавно и экономично регулировать частоту вращения ротора АД.
, то частота вращения ротора увеличивается. Таким образом, при наличии соответствующего источника (преобразователя частоты), включенного в цепь ротора, можно плавно и экономично регулировать частоту вращения ротора АД.
studfiles.net

ТОП 10: |
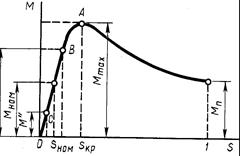
Вращающий момент возрастает в соответствии с характеристикой M=f(s). При критическом скольжении Sкp момент достигает максимального значения Ммах. С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент М начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х. х. Мо и полезного нагрузочного момента M2. При достижении электромагнитным моментом максимального значения наступает предел устойчивой работы асинхронного двигателя. Следовательно, для устойчивой работы двигателя необходимо, чтобы сумма нагрузочных моментов, действующих на ротор, была меньше максимального момента: Мст = Мо + М2 < Ммах. Но чтобы работа асинхронного двигателя была надежной и чтобы случайные кратковременные перегрузки не вызывали остановок двигателя, необходимо, чтобы он обладал перегрузочной способностью. Перегрузочная способность двигателя определяется отношением максимального момента Ммах к номинальному Mном. Для асинхронных двигателей общего назначения перегрузочная способность составляет Ммах/Мном = 1,7 — 2,5.
Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой-либо из трех величин: скольжения s, частоты тока в обмотке статора f1 или числа полюсов в обмотке статора 2р. Регулирование частоты вращения изменением скольжения sвозможно следующими способами: изменением подводимого к обмотке статора напряжения, нарушением симметрии этого напряжения. Регулирование частоты вращения изменением подводимого напряжения. Вращающий момент АД пропорционален Недостатками этого способа регулирования являются узкий диапазон регулирования и уменьшение КПД двигателя при увеличении несимметрии напряжения.
|
infopedia.su
 Частотавращения ротора асинхронного двигателя
Частотавращения ротора асинхронного двигателя
Из этого выражения следует, что частоту вращения ротора для фазных АД можно использовать все те же способы регулирования, как и для АД с кз ротором:
 регулирование частоты вращения изменением подводимого напряжения, нарушением симметрии подводимого напряжения, изменением частоты тока в обмотке статора, изменением числа полюсов обмотки статора. Ниже рассмотрим способы специфичные для АД с фазным ротором.
регулирование частоты вращения изменением подводимого напряжения, нарушением симметрии подводимого напряжения, изменением частоты тока в обмотке статора, изменением числа полюсов обмотки статора. Ниже рассмотрим способы специфичные для АД с фазным ротором.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора. В цепь ротора включается регулировочный реостат, подобный пусковому, но рассчитанный на длительный режим работы. Мех. Хар-ки АД при различных значениях активного сопротивления цепи ротора показывают, что с увеличением активного сопротивления цепи ротора возрастает скольжение, соответствующее заданному статическому моменту. Частота вращения ротора при этом уменьшается. Способ обеспечивает регулирование частоты вращения в широком диапазоне вниз от синхронной частоты вращения. Электрические потери в цепи ротора возрастают, но только из-за потерь в регулировочном реостате. Этот способ более благоприятный по сравнению с предыдущим, несмотря на снижение КПД АД.Регулированиечастоты вращения введением в цепь ротора добавочной ЭДС. В цепь ротора вводят от постороннего источника добавочную ЭДС, имеющую частоту, одинаковую с основной ЭДС ротора, и направленную согласно или встречно с ней. Векторная диаграмма для рассматриваемой ситуации изображена на рис. а. При введении в цепь вращающегося ротора добавочной ЭДС  , направленной встречно ЭДС
, направленной встречно ЭДС  , ток в обмотке ротора в первый момент времени уменьшится. В результате вращающий электромагнитный момент М станет меньше статического момента Мст и ротор начнет замедлять свою частоту вращения. Аналогично можно показать, что если в цепь ротора вводится добавочная ЭДС, направленная согласно с ЭДС , то частота вращения ротора увеличивается. Таким образом, при наличии соответствующего источника (преобразователя частоты), включенного в цепь ротора, можно плавно и экономично регулировать частоту вращения ротора АД.
, ток в обмотке ротора в первый момент времени уменьшится. В результате вращающий электромагнитный момент М станет меньше статического момента Мст и ротор начнет замедлять свою частоту вращения. Аналогично можно показать, что если в цепь ротора вводится добавочная ЭДС, направленная согласно с ЭДС , то частота вращения ротора увеличивается. Таким образом, при наличии соответствующего источника (преобразователя частоты), включенного в цепь ротора, можно плавно и экономично регулировать частоту вращения ротора АД.
poznayka.org
1.Регулирование частоты вращения АД с КЗ ротором 2
2.Пуск АД с фазным ротором 5
3.Регулирование частоты вращения АД с фазным ротором. 7
4.Пуск в ход асинхронных двигателей с КЗ ротором и фазным ротором 9
5.Асинхронные двигатели с улучшенными пусковыми характеристиками 12
6.Однофазный асинхронный двигатель. Устройство, принцип действия.Способы пуска. Разновидности. 14
7.Устройство,принцип действия, режимы работы АМ 15
8.Трехфазная асинхронная машина при неподвижном роторе. Основные уравнения для цепей статора и ротора. Параметры короткозамкнутой обмотки ротора. Приведение параметров вторичной цепи к числу витков и фаз первичной. 18
9.Трехфазная АМ при вращающемся роторе. Уравнения намагничивающих сил, токов и напряжений. 19
10.Электрическая схема замещения асинхронной машины. 22
11.Векторные диаграммы для режимов двигателя, генератора, 24
электромагнитного тормоза. 24
12.Энергетические диаграммы асинхронной машины 26
(двигатель, генератор, эм тормоз) 26
13.Зависимость КПД от полезной мощности на валу в режиме двигателя. 29
14.Электромагнитный момент АМ. Начальный пусковой, 30
максимальный и номинальный моменты. 30
15.Уравнение моментов. Механическая характеристика АМ. 32
Статическая устойчивость работы АМ в режиме двигателя. 32
16.Электрическая схема замещения АМ. (рис. 2 [10]) 34
Определение параметров схемы замешения из опытов хх и кз. 34
17.Создание вращающегося магнитного поля. Эллиптические, круговые и пульсирующие м. поля. Деформация и реверсирование вращающихся полей. 35
18.Рабочие характеристики асинхронного двигателя. 37
Частота вращения ротора асинхронного двигателя 
Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой-либо из трех величин: скольжения s, частоты тока в обмотке статора f1 или числа полюсов в обмотке статора 2р. Регулирование частоты вращения изменением скольжения s возможно следующими способами: изменением подводимого к обмотке статора напряжения; нарушением симметрии этого напряжения.
Регулирование частоты вращения изменением подводимого (первичного) напряжения: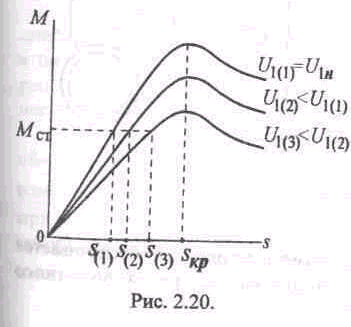
Вращающий момент АД пропорционален  , поэтому механические характеристики двигателя при напряжениях меньших номинального располагаются ниже естественной. Это объясняется недопустимостью подведения напряжения выше номинального. Если статический момент МСТ остается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается. Регулирование скольжения этим способом возможно в пределах 0 < s < sКР. Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольжения. С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД. С уменьшением напряжения U1 двигатель утрачивает перегрузочную способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД. Узкий диапазон регулирования и неэкономичность – недостатки. В данном способе регулирования могут быть применены схемы с использованием регулировочного автотрансформатора; дросселем насыщения; тиристорным регулятором напряжения.
, поэтому механические характеристики двигателя при напряжениях меньших номинального располагаются ниже естественной. Это объясняется недопустимостью подведения напряжения выше номинального. Если статический момент МСТ остается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается. Регулирование скольжения этим способом возможно в пределах 0 < s < sКР. Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольжения. С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД. С уменьшением напряжения U1 двигатель утрачивает перегрузочную способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД. Узкий диапазон регулирования и неэкономичность – недостатки. В данном способе регулирования могут быть применены схемы с использованием регулировочного автотрансформатора; дросселем насыщения; тиристорным регулятором напряжения.
Регулирование частоты вращения нарушением симметрии подводимого напряжения:
При нарушении симметрии трехфазной системы переменного напряжения, подводимой к АД, вращающееся магнитное поле статора становится эллиптическим. Такое поле содержит обратную составляющую (встречное поле), которая создает момент Мобр, направленный встречно вращающему моменту Мпр, поэтому результирующий электромагнитный момент АД уменьшается:  .
.
Недостатками этого способа регулирования являются узкий диапазон регулирования и уменьшение КПД двигателя при увеличении несимметрии напряжения.
Регулирование частоты вращения изменением частоты тока в обмотке статора. Это способ регулирования основан на изменении синхронной частоты вращения  , что возможно при наличии источника питания АД с регулируемой частотой -преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне. Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1, но при этом будет изменяться и максимальный электромагнитный момент АД. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и величину подводимого к обмотке статора напряжения U1.
, что возможно при наличии источника питания АД с регулируемой частотой -преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне. Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1, но при этом будет изменяться и максимальный электромагнитный момент АД. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и величину подводимого к обмотке статора напряжения U1.
1) Если частота вращения ротора АД регулируется при постоянном моменте нагрузки  , то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока:
, то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока:  .
.
1)
2) Если регулирование производится при условии постоянства мощности двигателя  , то подводимое напряжение к обмотке статора следует изменять в соответствии с законом
, то подводимое напряжение к обмотке статора следует изменять в соответствии с законом 
2)
Регулирование частоты вращения изменением числа полюсов обмотки статора.
Этот способ регулирования частоты вращения обеспечивает ступенчатую регулировку. Изменять число полюсов обмотки статора можно либо укладкой в пазах статора двух обмоток с разным числом полюсов, либо укладкой одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Второй способ получил наибольшее применение. АД с полюсно-переключаемыми обмотками могут работать в двух режимах: режим постоянного момента, режим постоянной мощности.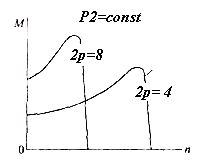
studfiles.net
 ;
; 
 , n – угловая скорость и частота вращения АД
, n – угловая скорость и частота вращения АД
 ,
,  - угловая скорость и частота вращения поля
- угловая скорость и частота вращения поля
Способы регулирования:
Изменением р
Изменением f
Изменением s
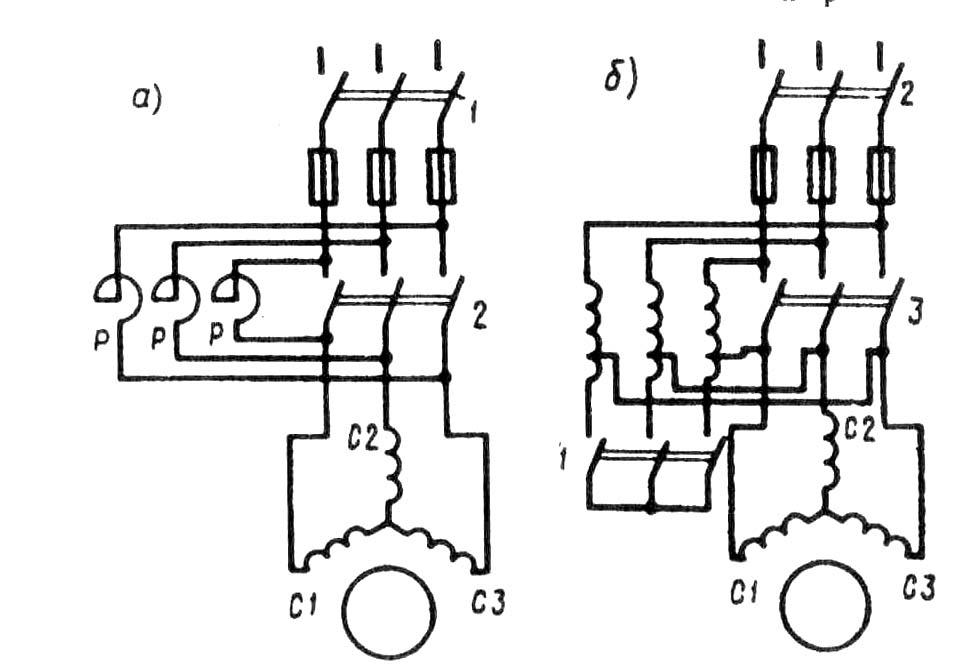
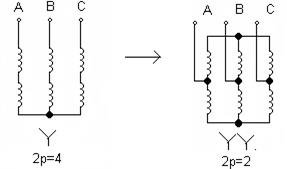
1) Регулирование изменением числа пар полюсов. Осуществляется в специальных многоскоростных двигателях. Они бывают 2-ух, 3-ех, 4-ех скоростными.
Рассмотрим принцип переключения числа пар полюсов нарисуем 1 фазу обмотки:
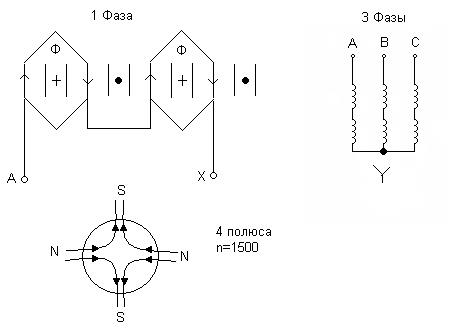
а) Y – Y Изменим направление тока во второй кат. на противоположное. Катушки остались последовательно включенными.
В трехфазной обмотке это будет выглядеть так:
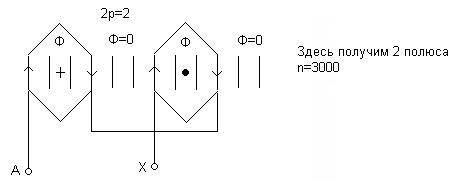
Рассмотрим соотношение для этой схемы. Вращающий момент при переключении полюсов изменится пропорционально изменению напряжения на обмотках, пропорционально числу витков и обратно пропорционально числу полюсов.
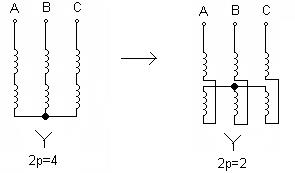
б) Y – YY

В трехфазном исполнении
Способ регулирования изменением числа пар полюсов имеет:
Хорошие энергетические характеристики
Высокий КПД при всех скоростях вращения
Регулирование без потерь, но регулирование ступенчатое и м.б. осуществлено только в специальных многоскоростных двигателях.
2) Регулирование изменением частоты. Такое регулирование осуществляется в статических преобразователях частоты СПЧ. Частота со стороны питающей сети 50 Гц, частота на выходе пр-ля изменяется в пределах от 0 до f ном и выше.
Одновременно с регулированием частоты регулируют напряжение на двигателе так, чтобы КПД и  оставались постоянными. Закон регулирования носит название з-н Костенко:
оставались постоянными. Закон регулирования носит название з-н Костенко:
 .
.
а) При постоянном моменте  - закон оптимального регулирования.
- закон оптимального регулирования.
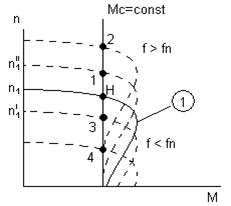

- ЕМХ (естественная мех. хар-ка)
Напряжение и частота увеличиваются пропорционально. При этом способе регулирования изменяется частота вращения магнитного поля и номинальное скольжение.
Регулирование скорости экономичное, без потерь. Поддерживается высокий КПД и . Регулирование плавное вверх (  ) и вниз (
) и вниз (  ) от номинальной частоты ( ). 1, 2, 3, 4 – рабочие точки на ИМХ.
) от номинальной частоты ( ). 1, 2, 3, 4 – рабочие точки на ИМХ.
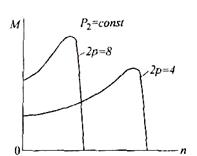
 б) При постоянной мощности
б) При постоянной мощности  механические характеристики будут иметь вид:
механические характеристики будут иметь вид:
Чем больше n, тем меньше момент нагрузки.
Недостаток высокая стоимость СПЧ, т.к. в них входят тр-ры и электронные ус-ва с применением силовых транзисторов или тиристоров.
3) Регулирование изменением скольжения. Скольжение может изменяться при введении реостата в цепь ротора (Д с фазным ротором) и изменением подведенного напряжения (Д с КЗ ротором). Напряжение можно плавно изменять с помощью АТ.
 а) Механические хар-ки при введении реостата в цепь ротора имеют вид:
а) Механические хар-ки при введении реостата в цепь ротора имеют вид:
 - ЕМХ
- ЕМХ
 - ИМХ
- ИМХ
При введении реостата изменяется наклонная хар-ка. Чем больше сопротивление вводим, тем больше наклон.
Преимущества способа:
Простота
Элементарное устройство
Недостатки:
Частота вращения ХХ не регулируется
Диапазон регулирования зависит от величины нагрузки
Регулирование неэкономичное, с потерями
Небольшой диапазон регулирования
При значительном снижении частоты вращения она становится неустойчивой из-за большой крутизны МХ
 б) В двигателе с КЗ ротором при уменьшении подведенного напряжения МХ изменятся так:
б) В двигателе с КЗ ротором при уменьшении подведенного напряжения МХ изменятся так:

Все предыдущие недостатки относятся к этому случаю. Дополнительно:
Уменьшенные кратность критического момента и запас устойчивости.
Если  , то происходит опрокидывание двигателя.
, то происходит опрокидывание двигателя.
16. Вращающий момент и механическая характеристика асинхронной машины.
Электромагнитный момент может быть определен из соотношения:

На основании Г –образной схемы замещения:
 - потери, m – число фаз статора, Хк – индуктивное сопротивление КЗ
- потери, m – число фаз статора, Хк – индуктивное сопротивление КЗ
 (*)
(*)
 - синхронная частота (частота вращ. поля)
- синхронная частота (частота вращ. поля)
М – электромагнитный момент АД.
(*) – механическая характеристика АД – это зависимость вращ. момента от скольжения либо от частоты вращения ротора М(s) или М( ). 
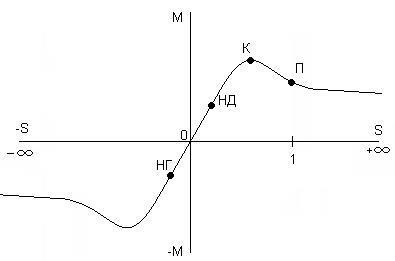 0<s<1 – двигательный режим
0<s<1 – двигательный режим
S=0 Идеальный ХХ. Ротор вращается синхронно с полем
S=1 Неподвижный ротор (начальный пусковой момент)
S<0 Генераторный режим. Номинальное скольжение -0,01..-0,04
НД – номинальная точка двигательного режима S=0,01..0,04
0–К – Рабочий участок хар-ки.
К – Критическая точка (ей соответствует критический или максимальный момент).
П – Пусковая точка (ей соответствует пусковой момент)
Рассмотрим механические характеристики АД:
Если критический момент Mk’ становится меньше момента нагрузки на валу, то под действием момента нагрузки он останавливается- опрокидывание двигателя.Естественная механическая характеристика при Uном и R2’=R2собств. При введении дополнительного сопротивления R2’=R2’собств+R2’добавл увеличивается наклон характеристики. При введении добавочного сопротивления получаем искусственную характеристику (или реостатную). Чем больше сопротивление в цепи ротора, тем больше пусковой момент. Mпmax=Mk-может быть получен при введении в цепь ротора добавочного сопротивления:
R2’=R2’добав+R2’собств= 
Это условие получения максимального пускового момента.
infopedia.su
 Частотавращения ротора асинхронного двигателя
Частотавращения ротора асинхронного двигателя , поэтому механические характеристики двигателя при напряжениях меньших номинального располагаются ниже естественной. Если статический момент МСТ остается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается. Регулирование скольжения этим способом возможно в пределах 0 < s < sКР. Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольжения. С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД. С уменьшением напряжения U1 двигатель утрачивает перегрузочную способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД. Узкий диапазон регулирования и неэкономичность – недостатки.Регулирование частоты вращения нарушением симметрии подводимого напряжения. При нарушении симметрии трехфазной системы переменного напряжения, подводимой к АД, вращающееся магнитное поле статора становится эллиптическим. Такое поле содержит обратную составляющую (встречное поле), которая создает момент Мобр,направленный встречно вращающему моменту Мпр, поэтому результирующий электромагнитный момент АД уменьшается:
, поэтому механические характеристики двигателя при напряжениях меньших номинального располагаются ниже естественной. Если статический момент МСТ остается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается. Регулирование скольжения этим способом возможно в пределах 0 < s < sКР. Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольжения. С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД. С уменьшением напряжения U1 двигатель утрачивает перегрузочную способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД. Узкий диапазон регулирования и неэкономичность – недостатки.Регулирование частоты вращения нарушением симметрии подводимого напряжения. При нарушении симметрии трехфазной системы переменного напряжения, подводимой к АД, вращающееся магнитное поле статора становится эллиптическим. Такое поле содержит обратную составляющую (встречное поле), которая создает момент Мобр,направленный встречно вращающему моменту Мпр, поэтому результирующий электромагнитный момент АД уменьшается:  . Механические характеристики двигателя в этом случае располагаются в интервале между характеристикой при симметричном напряжении (1) и характеристикой при однофазном питании (2) - пределом несимметрии 3-х фазного U. Регулировка несимметрии подводимого напряжения обеспечивается включением в одну из фаз однофазного регулировочного автотрансформатора AT.
. Механические характеристики двигателя в этом случае располагаются в интервале между характеристикой при симметричном напряжении (1) и характеристикой при однофазном питании (2) - пределом несимметрии 3-х фазного U. Регулировка несимметрии подводимого напряжения обеспечивается включением в одну из фаз однофазного регулировочного автотрансформатора AT.
 Регулирование частоты вращения изменением частоты тока в обмотке статора. Это способ регулирования основан на изменении синхронной частоты вращения
Регулирование частоты вращения изменением частоты тока в обмотке статора. Это способ регулирования основан на изменении синхронной частоты вращения  , что возможно при наличии источника питания АД с регулируемой частотой -преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне. Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1, но при этом будет изменяться и максимальный электромагнитный момент АД. Поэтомудля сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и величину подводимого к обмотке статора напряжения U1. Если частота вращения ротора АД регулируется при постоянном моменте нагрузки
, что возможно при наличии источника питания АД с регулируемой частотой -преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне. Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1, но при этом будет изменяться и максимальный электромагнитный момент АД. Поэтомудля сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и величину подводимого к обмотке статора напряжения U1. Если частота вращения ротора АД регулируется при постоянном моменте нагрузки  , то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока:
, то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока:  . При осуществлении этого закона регулирования основной магнитный поток АД при различных значениях частоты f1, остается неизменным, а мощность двигателя увеличивается пропорционально нарастанию частоты вращения. Если регулирование производится при условии постоянства мощности двигателя
. При осуществлении этого закона регулирования основной магнитный поток АД при различных значениях частоты f1, остается неизменным, а мощность двигателя увеличивается пропорционально нарастанию частоты вращения. Если регулирование производится при условии постоянства мощности двигателя  , то подводимое напряжение к обмотке статора следует изменять в соответствии с законом
, то подводимое напряжение к обмотке статора следует изменять в соответствии с законом 
 Регулирование частоты вращения изменением числа полюсов обмотки статора. Этот способ регулирования частоты вращения обеспечивает ступенчатую регулировку. Изменять число полюсов обмотки статора можно либо укладкой в пазах статора двух обмоток с разным числом полюсов, либо укладкой одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Второй способ получил наибольшее применение. АД с полюсно-переключаемыми обмотками могут работать в двух режимах: режим постоянного момента, когда при переключении обмотки статора с одной полюсности на другую вращающий момент на валу двигателя М2 остается неизменным, а мощность Р2изменяется пропорционально частоте вращения ротора
Регулирование частоты вращения изменением числа полюсов обмотки статора. Этот способ регулирования частоты вращения обеспечивает ступенчатую регулировку. Изменять число полюсов обмотки статора можно либо укладкой в пазах статора двух обмоток с разным числом полюсов, либо укладкой одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Второй способ получил наибольшее применение. АД с полюсно-переключаемыми обмотками могут работать в двух режимах: режим постоянного момента, когда при переключении обмотки статора с одной полюсности на другую вращающий момент на валу двигателя М2 остается неизменным, а мощность Р2изменяется пропорционально частоте вращения ротора  . Режим постоянной мощности, когда при переключении обмотки статора с одной полюсности на другую мощность Р2 остается примерно одинаковой, а момент на валу М2 изменяется соответственно изменению частоты вращения ротора
. Режим постоянной мощности, когда при переключении обмотки статора с одной полюсности на другую мощность Р2 остается примерно одинаковой, а момент на валу М2 изменяется соответственно изменению частоты вращения ротора  .
.