






~ 3
SB2 | SB1 | КМ1 |
|
| |
| КМ1.1 | КV |
|
|
КМ1
КV
КМ2
М КA1
КМ3 | КМ2.1 | КМ3 |
| ||
r2 |
| КA2 |
КA2 |
| КМ3.1 |
|
|
КМ2 r1

 КA1
КA1
Рис. 3.11. Схема управления пуском асинхронного двигателя с фазным ротором в две ступени в функции тока
Влитературе не приводятся типовые узлы управления торможением асинхронных двигателей с фазным ротором. Приводятся типовые узлы управления торможением асинхронных двигателей с короткозамкнутым ротором, которые могут быть использованы при разработке схем управления торможением асинхронных двигателей с фазным ротором. Рассмотрим некоторые примеры.
68

Управление в функции скорости
Для ограничения тока и получения различных тормозных характеристик в цепь ротора асинхронного двигателя с фазным ротором включается внешний резистор rДТ.
В настоящем пособии рассматривается динамическое торможение на линейной части характеристики. В этом случае в качестве внешнего тормозного резистора можно использовать пусковой резистор, что значительно упрощает схему управления торможением.
Наиболее просто управление динамическим торможением асинхронного двигателя в функции скорости осуществляется с помощью механического реле контроля скорости, пристраиваемого к валу двигателя.
На рис.3.12 представлена схема управления пуском и динамическим торможением асинхронного двигателя с фазным ротором в функции скорости при одинаковых сопротивлениях пускового и тормозного резисторов.
| ~ 3 |
|
|
|
|
|
|
|
|
|
| SB2 | SB1 | КМ3.1 | КМ1 |
|
|
|
|
|
|
| |
|
| rП |
|
| КМ1.1 |
| КV1 |
КМ1 |
| КМЗ |
|
|
| ||
|
| + |
|
|
| ||
|
|
|
|
|
|
| |
|
|
|
| =U |
|
|
|
|
| КBR | – |
|
| КМ2 | |
|
| КV1 |
| КV2 | |||
| М |
|
|
|
| ||
|
| UZ |
|
|
|
| |
|
|
|
|
|
|
| |
|
|
|
| rу | КBR |
| КМ3 |
|
|
|
| КМ1.2 |
| ||
|
|
|
|
|
|
| |
|
|
|
| КV2 |
|
|
|
Рис. 3.12. Схема управления пуском и динамическим торможением асинхронного двигателя с фазным ротором в функции скорости
69
Остановка двигателя производится нажатием кнопки «СТОП»–SВ2.При этом отключается контактор КМ1 и отключает двигатель от сети переменного тока. Одновременно отключается блокировочное реле КV1 и размыкает замыкающие контакты в цепи контактора ускорения КМ2. Он отключается и размыкает контакты в цепи ротора двигателя, закорачивающие пусковой резисторrПУСК (он же резистор динамического торможенияrДТ). В цепь ротора вводится резистор динамического торможения. Контактор КМ1, отключаясь, замыкает вспомогательные размыкающие контакты КМ1.2 в цепи контактора динамического торможения КМ3 и, так как при большой скорости двигателя контакты реле контроля скорости КBR в его цепи замкнуты, то он включается и подключает обмотку статора двигателя к источнику постоянного тока. Начинается динамическое торможение двигателя, которое будет происходить до тех пор, пока при скорости двигателя, близкой к нулю, не разомкнутся контакты реле контроля скорости КBR в цепи контактора динамического торможения КМ3. Он отключится и отключит статор двигателя от источника постоянного тока. Торможение прекращается, и двигатель останавливается.
Управление в функции времени
Схема управления пуском и динамическим торможением асинхронного двигателя с фазным ротором в функции времени приведена на рис. 3.13. В схеме используются пневматические реле времени, пристроенные к контакторам КМ1 и КМ2.
Отключение двигателя производится нажатием кнопки «СТОП»–SB2.При этом отключается контактор КМ1 и отключает двигатель от сети переменного тока. Кроме того, при его отключении размыкаются контакты реле времени КМ1.2 в цепи контактора ускорения КМ2. Он отключается, и в цепь ротора двигателя вводится пусковой резисторrПУСК (он же резистор динамического торможенияrДТ). При отключении КМ1 замыкаются его вспомогательные размыкающие контакты КМ1.3 в цепи контактора динамиче-
70

ского торможения КМ3. Так как контакты реле времени КМ2.1 в его цепи замкнуты, то он включается и подключает статор двигателя к источнику постоянного тока. Начинается динамическое торможение двигателя, которое будет происходить до полной остановки двигателя. При остановке двигателя контакты реле времени КМ2.1 в цепи контактора КМ3 разомкнуться, он отключится и отключит обмотку статора двигателя от источника постоянного тока.
| ~ 3 |
|
|
|
|
|
|
| SB2 | SB1 | КМ1 |
|
|
|
|
| КМ3.1 |
| rП |
|
| КМ1.1 |
|
КМ1 | КМЗ |
|
|
| |
| КМ1.2 |
|
| ||
|
| + |
| КМ2 | |
|
| =U |
|
|
|
|
| – |
|
|
|
| М |
|
|
|
|
|
| КМ2 | КМ1.3 | КМ2.1 | КМ3 |
|
| rПУСК |
|
| |
|
| rДТ |
|
|
|
Рис. 3.13. Схема управления пуском и динамическим торможением асинхронного двигателя с фазным ротором в функции времени
Управление в функции скорости
Схема управления пуском и торможением противовключением асинхронного двигателя с фазным ротором в функции скорости приведена на рис. 3.14.
Остановка двигателя осуществляется нажатием кнопки «СТОП»– SB2. При этом отключается контактор КМ1 и отключает двигатель от сети, отключается контактор КМ2 и в цепь ротора двигателя вводится резистор
– ступень противовключения rПР. Контактор КМ1, отключаясь, размыкает
71

вспомогательные замыкающие контакты КМ1.2 в цепи контактора ускорения КМ3. Он отключается, и в цепь ротора вводится пусковой резистор rПУСК. Кроме того, при отключении контактора КМ1 замыкаются его вспомогательные размыкающие контакты КМ1.3 в цепи тормозного контактора КМ4 и, так как контакты реле контроля скорости KBR в его цепи при большой скорости замкнуты, то он включается и подключает двигатель к сети на обратный порядок чередования фаз. Начинается торможение двигателя противовключением, которое будет происходить до тех пор, пока при скорости, близкой к нулю, реле контроля скорости не разомкнёт свои контакты KBR в цепи тормозного контактора КМ4. Он отключится и отключит двигатель от сети. Торможение прекращается, двигатель останавливается.
| ~ 3 |
|
|
|
|
|
| SB2 | SB1 | КМ4.1 | КМ1 |
|
|
|
|
| |
|
|
| КМ1.1 |
| КМ2 |
КМ4 | КМ1 |
|
|
| |
|
|
|
| ||
|
|
|
|
| КV1 |
| КBR |
|
|
|
|
| М |
|
|
| КМ3 |
| UZ | КV1 | КМ1.2 | КV2 | |
|
| ||||
| rу |
|
|
|
|
| КV2 | КМ1.3 | КBR |
| КМ4 |
|
|
|
КМ3
rПУСК
КМ2
rПР
Рис. 3.14. Схема управления пуском и торможением противовключением асинхронного двигателя с фазным ротором в функции скорости
72

Управление в функции времени
Схема управления пуском и торможением противовключением асинхронного двигателя с фазным ротором приведена на рис. 3.15. В схеме применены пневматические реле времени, пристроенные к контакторам КМ1 и КМ3.
~ 3 |
|
|
|
| SB2 | SB1 | КМ1 |
|
|
| КМ4.1 |
|
| КМ1.1 | КМ2 |
КМ4 | КМ1 |
| |
|
| ||
| КМ1.2 |
| КМ3 |
|
|
| |
М |
| КМ3.1 | КМ4 |
| КМ1.3 |
| |
|
|
|
КМ3
rПУСК
КМ2
rПР
Рис. 3.15. Схема управления пуском и торможением противовключением асинхронного двигателя с фазным ротором в функции времени
Остановка двигателя осуществляется нажатием кнопки «СТОП»–SB2.При этом отключается контактор КМ1 и отключает двигатель от сети, отключается контактор КМ2 и в цепь ротора вводится резистор – ступень противовключенияrПР. Контактор КМ1, отключаясь, размыкает без выдержки времени вспомогательные замыкающие контакты КМ1.2 в цепи контактора ускорения КМ3. Он отключается, и в цепь ротора вводится пусковой резисторrПУСК. Кроме того, при отключении контактора КМ1 замыкаются его вспомогательные размыкающие контакты КМ1.3 в цепи тормозного контак-
73
тора КМ4. Так как вспомогательные замыкающие контакты КМ3.1 контактора КМ3 в его цепи замкнуты, то он включается и подключает двигатель к сети на обратный порядок чередования фаз. Начинается торможение двигателя противовключением, которое будет происходить до тех пор, пока реле времени торможения не разомкнёт свои контакты КМ3.1 в цепи контактора КМ4. Он отключится и отключит двигатель от сети. Торможение прекращается, двигатель остановлен.
74
studfiles.net
Количество просмотров публикации Торможение асинхронных двигателей противовключением - 223
Динамическое торможение асинхронных двигателей
Применяется для быстрой остановки асинхронных двигателей в нереверсивных приводах. Для динамического торможения, обмотка статора отключается от сети трех фазного переменного тока и включения на пониженное напряжение постоянного тока.Обмотка статора включается по одной из схем. При соединении звездой постоянный ток проходит через две фазы статора (рис1-1)
Рис (1-1) Схемы включения обмоток статора при динамическом торможении.
Постоянный ток, протекая по обмотке статора, создает неподвижное в пространстве магнитное поле с синусоидальным распределением индукции по расточке статора. В случае если ротор по инерции или под действием активного статического момента вращаться в магнитном поле статора, то в обмотке ротора наводится ЭДС, которая в замкнутом контуре ротора создает ток. Взаимодействие тока ротора с магнитным полем статора создает тормозящий электромагнитный момент.
Асинхронный двигатель в указанных условиях представляет собой обращенный синхронный генератор, работающий при частоте на сопротивление ротора. Относительная угловая скорость в режиме динамического торможения аналогична скольжению S.
Механическая характеристика режима динамического торможения является неблагоприятной. Тормозящий момент незначителен. Для усиления тормозного эффекта в двигателях с фазным ротором вводят добавочные сопротивления в цепь ротора. добавить вводят добавочные сопротивления в цепь ротора
Рис.(1-2) Механическая характеристика асинхронного двигателя в режиме динамического торможения является неблагоприятной.
Режим противовключения возникает, когда ротор двигателя под действием внешних сил или по инерции, начинает вращаться в направлении противоположном вращению поля статора. Этот режим используется для экстренных остановок двигателя в реверсируемых электроприводах, а так же обеспечения посадочной скорости при опускании тяжелых грузов.
Практически режим противовключения получают изменением порядка следования фаз сети в обмотке статора. Изменение следования фаз осуществляется переключением двух любых линейных проводов, подведенных к статору двигателя.
При этом электропривод будет затормаживаться от скорости (что соответствует скольжению ) до скорости ( ). Затормаживание происходит под действием отрицательного динамического момента .
В момент, когда двигатель крайне важно отключить от сети, иначе он будет разгоняться в противоположном направлении: при реактивном статическом моменте на валу (если ) до скорости , а при активном моменте будет разгоняться до скорости .
То есть при активном моменте двигатель будет работать последовательно в режимах:
∙ противовключения;
∙ короткое замыкание
∙ реверсивном двигательном от до ;
∙ идеального холостого хода ;
∙ рекуперативного торможения от до ;341.12.13
Рис 1-3 Механическая характеристика асинхронного двигателя при торможении противовключением
В режиме противовключения двигатель преобразует кинетическую энергию, движущихся по инерции масс, в электрическую энергию, которая в виде тепла выделяется в цепи ротора. Одновременно двигатель работает как трансформатор. Размещено на реф.рфОн (двигатель) потребляет энергию из сети и расходует ее на нагрев сопротивлений ротора. Потребляемый двигателем ток превышает . В результате двигатель может перегреваться. По этой причине для ограничения толчка тока ротора в цепь двигателя с фазным ротором одновременно с противовключением вводят добавочное сопротивление.
При активном статическом моменте на валу двигателя с фазным ротором режим противовключения можно также получить, включением в цепь ротора добавочных сопротивлений (большой величины) уменьшить пусковой момент двигателя до значения меньшего, чем .
Режиму противовключения соответствуют скольжения
и обычно находящиеся в пределах .
Рис 1-4 Переход асинхронного двигателя в режим противовключения под действием активного статического момента.????
referatwork.ru

Ответственным моментом при эксплуатации двигателей постоянного тока является их пуск. При включении двигателя в сеть в начальный момент ток в цепи якоря ограничивается лишь электрическим сопротивлением цепи якоря, так как в неподвижном якоре ЭДС не индуцируется. Поэтому начальный пусковой ток при непосредственном включении двигателя в сеть может достигать опасных значений, способных нарушить работу щеточно- коллекторного узла и вызвать «круговой огонь» на коллекторе. Кроме того, такой ток создаст чрезмерно большой пусковой момент, оказывающий на вращающиеся части электропривода ударное воздействие, способное вызвать их механическое разрушение.Эффективным средством ограничения пускового тока в двигателях постоянного тока является применение пусковых реостатов. Существует два метода расчета пусковых реостатов: графический и аналитический.
В основе графического метода лежит пусковая диаграмма двигателя. Пусковая диаграмма, представленная на рис. 13.14, совмещена с трехступенчатым пусковым реостатом; K1, К2 и КЗ являются контактами силовых контакторов, посредством которых осуществляется переключение ступеней реостата, а rдоб1, rдоб2 и rдоб3 — резисторы ступеней пускового реостата. Механические характеристики 1, 2, 3 соответствуют ступеням пускового реостата RПР1, RПР2 и RПР3. Значения начального пускового тока I1 и тока переключений реостатов I2 обычно принимают
I1 = (1,5…2,5)Iaном
I2 = (1,0…1,3)Iaном
при этом ток переключений I2 должен быть не меньше тока нагрузки, соответствующего статическому моменту сопротивления нагрузки МС, на вал двигателя. Для двигателей специального назначения, с тяжелыми условиями работы, например двигателей краново-металлургических серий, указанные значения токов могут быть увеличены.

При аналитическом методе расчет сопротивлений резисторов пускового реостата ведут по формулам:
В этих выражениях λ = I1/I2 представляет собой отношение начального пускового тока I1 к току переключений I2. При работе двигателя от регулируемого преобразователя напряжения необходимость в пусковом реостате отпадает, так как пуск двигателя можно начинать с любого пониженного значения напряжения на обмотке якоря в соответствии с допустимым значением начального пускового тока.
Помимо основного (двигательного) режима работы в двигателях постоянного тока независимого (параллельного) возбуждения возможны тормозные режимы.
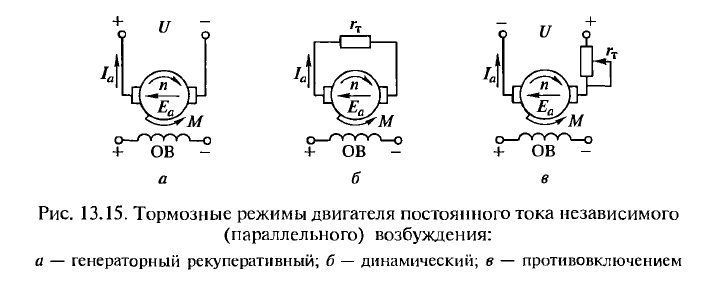
Этот режим наступает, когда частота вращения якоря превышает частоту вращения холостого хода n0.
В этих условиях ЭДС машины Еа = сеФn0 превышает напряжение питающей сети (Еа > Uном), при этом ток якоря, а следовательно, и электромагнитный момент меняют свое направление на противоположное. В итоге машина постоянного тока переходит в генераторный режим и вырабатываемую при этом электроэнергию отдает в сеть. Электромагнитный момент двигателя становится тормозящим и противодействует внешнему вращающему моменту, создаваемому силами инерции вращающего с прежней скоростью якоря (рис. 13.15, а). Этот процесс торможения будет продолжаться до тех пор, пока частота вращения якоря, уменьшаясь, не достигнет значения n0.
Таким образом, для перехода двигателя в режим генераторного рекуперативного торможения не требуется изменений в схеме включения двигателя.
Генераторное рекуперативное торможение — наиболее экономичный вид торможения, так как он сопровождается возвратом энергии в сеть. Применение этого способа торможения является эффективным энергосберегающим средством в электроприводе Он целесообразен в электротранспортных средствах, работа которых связана с частыми остановками и движением под уклон. В этом случае кинетическая энергия движения транспортного средства (трамвай, троллейбус, электропоезд) преобразуется в электрическую энергию и возвращается в сеть.
Возможен способ перевода двигателя в режим генераторного рекуперативного торможения и при установившейся частоте вращения якоря. Для этого необходимо увеличить в двигателе магнитный поток возбуждения, т.е. ток в обмотке возбуждения.
Из выражения ЭДС якоря Еа = сеФn следует, что с ростом магнитного потока возбуждения Ф при неизменной частоте вращения n ЭДС якоря Еа увеличивается, что ведет к уменьшению тока в цепи якоря:

При ЭДС Еа = U ток якоря Ia = 0, а частота вращения якоря достигает значения n = n0. При дальнейшем увеличении потока возбуждения Ф, а следовательно, возрастании ЭДС якоря Еа пограничная частота вращения снижается (см. 13.12, б), а частота вращения якоря, оставаясь практически неизменной за счет сил инерции вращающихся частей электропривода, начинает превышать пограничную частоту n0. При этом ЭДС якоря превышает напряжение сети и двигатель переходит в режим генераторного рекуперативного торможения.
Необходимость в таком торможении возникает в том случае, когда после отключения двигателя от сети его якорь под действием кинетической энергии движущихся масс электропривода продолжает вращаться. Если при этом обмотку якоря, отключив от сети, замкнуть на резистор rт, то двигатель перейдет в генераторный режим (обмотка возбуждения должна оставаться включенной в сеть). Вырабатываемая при этом электроэнергия не возвращается в сеть, как это происходит при рекуперативном торможении, а преобразуется в теплоту, которая выделяется в сопротивлении

В режиме динамического торможения ЭДС якоря не меняет своего направления, но поскольку якорь отключен от сети (U = 0), то ток якоря изменит направление, так как будет создаваться ЭДС Еа
т.е. станет отрицательным. В результате электромагнитный момент такжеизменит направление и станет тормозящим (рис. 13.15, б). Процесс торможения продолжается до полной остановки якоря (n = 0).
Допустим, что двигатель работает в основном (двигательном) режиме с номинальной нагрузкой. При отключении двигатели от сети вращающиймомент М = 0, но якорь двигателя за счет кинетической энергии вращающихся масс электропривода некоторое время будет продолжать вращение, т.е. произойдет выбег двигателя.
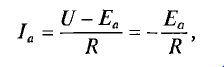
Чтобы уменьшить время выбега двигателя, применяют торможение противовключением. С этой целью изменяют полярность напряжения на клеммах обмотки якоря (полярность клемм обмотки возбуждения должна остаться прежней) и напряжение питания обмотки якоря становится отрицательным (- U). Но якорь двигателя под действием кинетической энергии вращающихся масс электропривода сохраняет прежнее (положительное) направление вращения, и так как направление магнитного потока не изменилось, то ЭДС якоря Еа также не меняет своего направления и действует согласно напряжению (-U), при этом ток якоря создается суммой напряжения сети U и ЭДС якоря Еа(рис. 13.15, в):

где rт, — сопротивление резистора в цепи якоря двигателя.
В этих условиях электромагнитный момент станет отрицательным.
Под действием тормозящего момента — Mт, частота вращения якоря уменьшается, достигнув нулевого значения.Если в этот момент цепь якоря не отключить от сети, то произойдет реверсирование двигателя и его якорь под действием момента, который прежде был тормозным, начнет вращение в противоположную сторону. При этом двигатель перейдет в двигательный (основной) режим с отрицательными значениями частоты вращения и вращающего момента. Во избежание нежелательного реверсирования операцию торможения противовключением автоматизируют, чтобы при нулевом значении частоты вращения цепь якоря отключалась от сети.
electrikam.com









