





Рис. 8.13. Схема асинхронного ЭП с тиристорным пусковым устройством
Эффективным методом формирования желаемых графиков изменения тока и момента двигателя в переходных режимах является регулирование напряжения на его статоре с помощью тиристорных пусковых устройств (ТПУ). Чаще всего это делается для ограничения тока и момента двигателя при пуске («мягкий» способ пуска), хотя с помощью этих устройств можно обеспечить и повышение момента двигателя при пуске («жесткий» способ пуска).
Тиристорное пусковое устройство включается между источником питания (сетью переменного тока) с напряжением U1 и статором двигателя. В нереверсивном ТПУ его силовую часть образуют три пары встречно-параллельно включенных тиристоров VS1-VS6, управление которыми осуществляется импульсами напряжения, поступающими на них от системы импульсно-фазового управления (СИФУ). Ограничение тока и момента осуществляется за счет снижения подводимого к двигателю напряжения, что достигается соответствующим изменением во времени угла управления тиристорами. Напряжение при пуске может изменяться по различным законам – линейно нарастать от нуля до сетевого, быть пониженным в течение всего времени пуска или изменяться по так называемому бустерному варианту, при котором для облегчения пуска двигателя на него вначале подается скачком некоторое напряжение, которое затем продолжает нарастать уже по линейному закону. В замкнутой системе может быть обеспечено и поддержание тока статора на заданном уровне.
Данный способ регулирования координат, называемый часто реостатным, может быть осуществлен введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 8.14). Он привлекает в первую очередь простотой своей реализации, отличаясь в то же время невысокими показателями качества регулирования и экономичностью.

Рис. 8.14. Схемы включения АД с фазным ротором (а) и с короткозамкнутым ротором (б)
Включение добавочных резисторов R1д в цепь статора применяется главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором.
Все искусственные электромеханические характеристики располагаются в первом квадранте ниже и левее естественной. С учетом того, что скорость идеального холостого хода ω0 при включении R1д не изменяется, получаемые искусственные электромеханические характеристики можно представить семейством кривых (рис.8.15 а).

а) б)
Рис.8.15. Электромеханические (а) и механические (б) характеристики АД при регулировании координат с помощью резисторов в цепи статора
Характеристики 2–4 расположены ниже естественной характеристики 1, построенной при R1д = 0, причем большему значению R1д соответствует больший наклон искусственных характеристик 2-4.
Механические характеристики АД представлены на рисунке 8.15 б.
Координаты точки экстремума Мк и Sк изменяются при варьировании R1д, а именно: в соответствии с (8.15) и (8.16) при увеличении R1д критический момент Мк и критическое скольжение Sк уменьшаются. Уменьшается и пусковой момент.
В то же время искусственные механические характеристики (рис. 8.15б) мало пригодны при регулировании скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения R1д снижается; способ отличает и низкая экономичность. В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко [2].
Включение добавочных резисторов R2д в цепь ротора применяется как с целью регулирования тока и момента АД, так и его скорости (рис. 8.14а).
Искусственные электромеханические характеристики при R2д = var имеют вид, показанный на рисунке 8.15а, и могут использоваться для регулирования (ограничения ) пускового тока Iкз = Iп .
Скорость идеального холостого хода АД ω0 и максимальный (критический) момент двигателя Мк в соответствии с [2] остаются неизменными при регулировании R2д , а критическое скольжение Sк , как это следует из [2], изменяется.
Выполненный анализ позволяет построить естественную 1 (R2д = 0)и искусственные 2–3 (R2д3 > R2д2) характеристики (рис. 8.16) и сделать заключение, что за счет изменения R2д имеется возможность повышать пусковой момент АД вплоть до критического момента Мк без снижения перегрузочной способности двигателя, что весьма важно при регулировании его скорости.

Рис. 8.16. Механические характеристики при различных сопротивлениях R2д добавочного резистора в цепи ротора
В остальном рассматриваемый способ характеризуется такими же показателями, что и для ДПТ НВ. Диапазон регулирования скорости небольшой – около 2–3 – из-за снижения жесткости характеристик и роста потерь по мере его увеличения. Плавность регулирования скорости, которая изменяется только вниз от основной, определяется плавностью изменения добавочного резистора R2д.
Затраты, связанные с созданием данной системы ЭП, невелики, так как для регулирования обычно используются простые и дешевые ящики металлических резисторов. В то же время эксплуатационные затраты оказываются значительными, поскольку велики потери в ПД.
С увеличением скольжения S возрастают потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД ЭП.
Регулирование скорости этим способом осуществляется при небольшом диапазоне регулирования скорости или кратковременной работе на пониженных скоростях. Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Расчет сопротивления добавочного резистора R2д может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
Если искусственная характеристика определена полностью, то сопротивление добавочного резистора (например, R2д1) можно определить по выражению [2,4]:
 , (8.30)
, (8.30)
где  – сопротивление фазы ротора АД.
– сопротивление фазы ротора АД.
Если искусственная характеристика задана своей рабочей частью, то можно использовать метод отрезков, для чего на рисунке 8.16 проведена вертикальная линия, соответствующая номинальному моменту Мном, и отмечены характерные точки: а, b, c, d, e. Сопротивление искомого резистора R2д1 определяется как [2,4]
R2д1 = R2номаb/ас, (8.31)
где  – номинальное сопротивление АД;
– номинальное сопротивление АД;  – ЭДС ротора при S = 1;
– ЭДС ротора при S = 1;  – номинальный ток ротора.
– номинальный ток ротора.
studfiles.net
Количество просмотров публикации Регулирование координат асинхронного двигателя с помощью резисторов - 367
Этот способ регулирования часто называют реостатным. Он заключается во введении добавочных (активных) сопротивлений в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь должна быть несколько вариантов [9].
Первый вариант: включение добавочного резистора в цепь статора.
.
Этот способ применяется для ограничения токов в переходный период. Обычно он используется для Д с короткозамкнутым ротором. Очевидно, что включение резистора приводит к снижению тока ротора и статора и не влияет на величину скорости идеального хода:
.
Критическое скольжение уменьшается:
.
Рис. 5.5. Электромеханические (а) и механические (б) характеристики АД при введении добавочного резистора в цепь статора
Электромеханические характеристики (рис. 5.5, а) выходят из одной точки . С увеличением сопротивления
жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, данный способ можно использовать для ограничения тока Д.
Анализ механических характеристик (рис. 5.5, б) показывает, что они также выходят из одной точки и располагаются ниже и левее естественной. С увеличением
критический момент уменьшается, уменьшается также и критическое скольжение. Использовать данный метод для регулирования частоты вращения не представляется возможным из-за малого диапазона регулирования и малой перегрузочной способности. Этот способ также отличает низкая экономичность. Применяется данный способ, как правило, лишь для ограничения токов и моментов при пуске, торможении и реверсе.
Примечание: должна быть использовано импульсное регулирование координат привода за счёт замыкания ключом резисторов, включенных в цепь статора.
Второй вариант: включение добавочного резистора в цепь ротора.
Этот метод используется только в Д с фазным ротором и состоит во введении добавочного сопротивления в цепь ротора. В данном случае переменной величиной является
= var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
Необходимо отметить, что по своим возможностям и характеристикам данный способ соответствует способу регулирования частоты вращения ДПТ НВ изменением сопротивления в цепи якоря.
При увеличении характеристики выходят из одной точки
и располагаются ниже естественной. Диапазон регулирования
. Плавность зависит от плавности изменения регулировочного резистора
. Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента͵ и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, в связи с этим при увеличении
увеличиваются и потери.
Рис. 5.6. Механические характеристики АД при введении
добавочного сопротивления в цепь ротора
Примечание: возможно импульсное регулирование частоты вращения этим методом (рис. 5.7).
| | |||
|
t1 – время замкнутого состояния ключа К;
t2 – время разомкнутого состояния ключа К.
При замыкании ключа К резистор R шунтируется и двигатель работает на естественной характеристике.
referatwork.ru
Изменение величины напряжения, подводимого к статору АД, позволяет осуществлять в статических и динамических режимах регулирование его координат с хорошими показателями и с помощью относительно простых схем управления (рис.8.13). Этот же способ может быть использован и для обеспечения наиболее экономичных режимов работы АД.
Для регулирования координат короткозамкнутого АД между сетью переменного тока со стандартным напряжением U1ном и статором (рис. 8.20а) двигателя 2 включен тиристорный регулятор 1 напряжения (ТРН), выходное напряжение которого U1рег изменяется с помощью маломощного внешнего сигнала управления Uу.
Изменяя величину этого сигнала, можно регулировать напряжение на статоре двигателя U1рег в пределах от величины сетевого напряжения U1ном и практически до нуля.
Регулирование напряжения на статоре не приводит к изменению скорости холостого хода  и не влияет на критическое скольжениеSк, но существенно изменяет величину критического (максимального) момента Мк..
и не влияет на критическое скольжениеSк, но существенно изменяет величину критического (максимального) момента Мк..
В результате при U1рег = var искусственные характеристики (рис. 8.20б) оказываются малопригодными для целей регулирования скорости, так как по мере уменьшения напряжения резко снижается критический момент АД и тем самым его перегрузочная способность, а диапазон регулирования скорости очень мал.

а) б) в)
Рис. 8.20. Схема регулирования координат АД изменением напряжения на статоре (а), механические характеристики (б) и кривые напряжения (в)
Характеристики 3–6 построены при напряжениях 1; 0,8; 0,6 и 0,4 U1ном. По указанным причинам разомкнутая схема (см. рис. 8.13) используется лишь для воздействия в переходных процессах на момент АД, что может требоваться, напомним, для обеспечения заданных ускорения движения ЭП или регулирования натяжения на исполнительном органе рабочей машины.
Диапазон напряжения скорости можно увеличить лишь в замкнутых электроприводах.
Регулятор напряжения позволяет также осуществлять регулирование (ограничение) в переходных режимах тока АД. Электромеханические характеристики при этом имеют вид, показанных на рис. 8.15 [2].
При подаче на тиристоры ТРН импульсов управления с углом управления  они будут полностью открыты, и к АД будет приложено все напряжение сетиU1 = Uрег (рис. 8.20 в). Если осуществлять подачу импульсов на тиристоры с некоторой задержкой относительно предельного режима (угол управления
они будут полностью открыты, и к АД будет приложено все напряжение сетиU1 = Uрег (рис. 8.20 в). Если осуществлять подачу импульсов на тиристоры с некоторой задержкой относительно предельного режима (угол управления  ), то к АД будет прикладываться часть напряжения сети, как показано для фазы А (рис. 8.20 в). Изменяя угол управления
), то к АД будет прикладываться часть напряжения сети, как показано для фазы А (рис. 8.20 в). Изменяя угол управления  от нуля до
от нуля до  , можно регулировать напряжение на АД от полного напряжения сети до нуля.
, можно регулировать напряжение на АД от полного напряжения сети до нуля.
Существенно отметить, что форма напряжения на статоре АД является не- синусоидальной. Несинусоидальное напряжение можно представить как совокупность нескольких синусоидальных напряжений – гармоник, каждая из которых изменяется с определенной частотой. Частота изменения первой из них (основной гармоники) равна частоте питающего напряжения, а частота других гармоник больше чем первой. Обычно 1-я гармоника имеет наибольшую амплитуду и по ней ведутся все основные расчеты.
С помощью ТРН можно обеспечивать принудительное электрическое торможение АД, формирование требуемых динамических характеристик ЭП в переходных режимах, обеспечение наиболее экономичных режимов АД при его работе с переменной нагрузкой и изменение направления скорости АД.
studfiles.net
Этот способ регулирования часто называют реостатным. Он заключается во введении добавочных (активных) сопротивлений в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь может быть несколько вариантов [9].
Первый вариант: включение добавочного резистора  в цепь статора.
в цепь статора.
 .
.
Этот способ применяется для ограничения токов в переходный период. Обычно он используется для Д с короткозамкнутым ротором. Очевидно, что включение резистора приводит к снижению тока ротора и статора и не влияет на величину скорости идеального хода:
 .
.
Критическое скольжение уменьшается:
 .
.

Рис. 5.5. Электромеханические (а) и механические (б) характеристики АД при введении добавочного резистора в цепь статора
Электромеханические характеристики (рис. 5.5, а) выходят из одной точки  . С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
. С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
Анализ механических характеристик (рис. 5.5, б) показывает, что они также выходят из одной точки и располагаются ниже и левее естественной. С увеличением критический момент уменьшается, уменьшается также и критическое скольжение. Использовать этот метод для регулирования частоты вращения не представляется возможным из-за малого диапазона регулирования и малой перегрузочной способности. Этот способ также отличает низкая экономичность. Применяется данный способ, как правило, лишь для ограничения токов и моментов при пуске, торможении и реверсе.
Примечание: может быть использовано импульсное регулирование координат привода за счет замыкания ключом резисторов, включенных в цепь статора.
Второй вариант: включение добавочного резистора  в цепь ротора.
в цепь ротора.
Этот метод используется только в Д с фазным ротором и состоит во введении добавочного сопротивления  в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
По своим возможностям и характеристикам этот способ соответствует способу регулирования частоты вращения ДПТ НВ изменением сопротивления в цепи якоря.
При увеличении характеристики выходят из одной точки и располагаются ниже естественной. Диапазон регулирования  . Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.
. Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.

Рис. 5.6. Механические характеристики АД при введении
добавочного сопротивления в цепь ротора
Примечание: возможно импульсное регулирование частоты вращения этим методом (рис. 5.7).

 | |||
|
 Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат
Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат t1 – время замкнутого состояния ключа К;
t2 – время разомкнутого состояния ключа К.
При замыкании ключа К резистор R шунтируется и двигатель работает на естественной характеристике.
studlib.info
Этот способ регулирования часто называют реостатным. Он заключается во введении добавочных (активных) сопротивлений в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь может быть несколько вариантов [9].
Первый вариант: включение добавочного резистора  в цепь статора.
в цепь статора.
 .
.
Этот способ применяется для ограничения токов в переходный период. Обычно он используется для Д с короткозамкнутым ротором. Очевидно, что включение резистора приводит к снижению тока ротора и статора и не влияет на величину скорости идеального хода:
 .
.
Критическое скольжение уменьшается:
 .
.
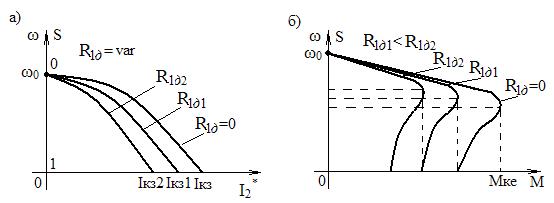
Рис. 5.5. Электромеханические (а) и механические (б) характеристики АД при введении добавочного резистора в цепь статора
Электромеханические характеристики (рис. 5.5, а) выходят из одной точки  . С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
. С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
Анализ механических характеристик (рис. 5.5, б) показывает, что они также выходят из одной точки и располагаются ниже и левее естественной. С увеличением критический момент уменьшается, уменьшается также и критическое скольжение. Использовать этот метод для регулирования частоты вращения не представляется возможным из-за малого диапазона регулирования и малой перегрузочной способности. Этот способ также отличает низкая экономичность. Применяется данный способ, как правило, лишь для ограничения токов и моментов при пуске, торможении и реверсе.
Примечание: может быть использовано импульсное регулирование координат привода за счет замыкания ключом резисторов, включенных в цепь статора.
Второй вариант: включение добавочного резистора  в цепь ротора.
в цепь ротора.
Этот метод используется только в Д с фазным ротором и состоит во введении добавочного сопротивления  в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
По своим возможностям и характеристикам этот способ соответствует способу регулирования частоты вращения ДПТ НВ изменением сопротивления в цепи якоря.
При увеличении характеристики выходят из одной точки и располагаются ниже естественной. Диапазон регулирования  . Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.
. Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.

Рис. 5.6. Механические характеристики АД при введении
добавочного сопротивления в цепь ротора
Примечание: возможно импульсное регулирование частоты вращения этим методом (рис. 5.7).

 | |||
|
 Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат
Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат
t1 – время замкнутого состояния ключа К;
t2 – время разомкнутого состояния ключа К.
При замыкании ключа К резистор R шунтируется и двигатель работает на естественной характеристике.
cyberpedia.su
Этот способ регулирования часто называют реостатным. Он заключается во введении добавочных (активных) сопротивлений в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь может быть несколько вариантов [9].
Первый вариант: включение добавочного резистора в цепь статора.
.
Этот способ применяется для ограничения токов в переходный период. Обычно он используется для Д с короткозамкнутым ротором. Очевидно, что включение резистора приводит к снижению тока ротора и статора и не влияет на величину скорости идеального хода:
.
Критическое скольжение уменьшается:
.
Рис. 5.5. Электромеханические (а) и механические (б) характеристики АД при введении добавочного резистора в цепь статора
Электромеханические характеристики (рис. 5.5, а) выходят из одной точки . С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
Анализ механических характеристик (рис. 5.5, б) показывает, что они также выходят из одной точки и располагаются ниже и левее естественной. С увеличением критический момент уменьшается, уменьшается также и критическое скольжение. Использовать этот метод для регулирования частоты вращения не представляется возможным из-за малого диапазона регулирования и малой перегрузочной способности. Этот способ также отличает низкая экономичность. Применяется данный способ, как правило, лишь для ограничения токов и моментов при пуске, торможении и реверсе.
Примечание: может быть использовано импульсное регулирование координат привода за счет замыкания ключом резисторов, включенных в цепь статора.
Второй вариант: включение добавочного резистора в цепь ротора.
Этот метод используется только в Д с фазным ротором и состоит во введении добавочного сопротивления в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
По своим возможностям и характеристикам этот способ соответствует способу регулирования частоты вращения ДПТ НВ изменением сопротивления в цепи якоря.
При увеличении характеристики выходят из одной точки и располагаются ниже естественной. Диапазон регулирования . Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.
Рис. 5.6. Механические характеристики АД при введении
добавочного сопротивления в цепь ротора
Примечание: возможно импульсное регулирование частоты вращения этим методом (рис. 5.7).
| | |||
|
Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат t1 – время замкнутого состояния ключа К;
t2 – время разомкнутого состояния ключа К.
При замыкании ключа К резистор R шунтируется и двигатель работает на естественной характеристике.
studlib.info
Этот способ регулирования часто называют реостатным. Он заключается во введении добавочных (активных) сопротивлений в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь может быть несколько вариантов [9].
Первый вариант: включение добавочного резистора  в цепь статора.
в цепь статора.
 .
.
Этот способ применяется для ограничения токов в переходный период. Обычно он используется для Д с короткозамкнутым ротором. Очевидно, что включение резистора приводит к снижению тока ротора и статора и не влияет на величину скорости идеального хода:
 .
.
Критическое скольжение уменьшается:
 .
.

Рис. 5.5. Электромеханические (а) и механические (б) характеристики АД при введении добавочного резистора в цепь статора
Электромеханические характеристики (рис. 5.5, а) выходят из одной точки  . С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
. С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
Анализ механических характеристик (рис. 5.5, б) показывает, что они также выходят из одной точки и располагаются ниже и левее естественной. С увеличением критический момент уменьшается, уменьшается также и критическое скольжение. Использовать этот метод для регулирования частоты вращения не представляется возможным из-за малого диапазона регулирования и малой перегрузочной способности. Этот способ также отличает низкая экономичность. Применяется данный способ, как правило, лишь для ограничения токов и моментов при пуске, торможении и реверсе.
Примечание: может быть использовано импульсное регулирование координат привода за счет замыкания ключом резисторов, включенных в цепь статора.
Второй вариант: включение добавочного резистора  в цепь ротора.
в цепь ротора.
Этот метод используется только в Д с фазным ротором и состоит во введении добавочного сопротивления  в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
По своим возможностям и характеристикам этот способ соответствует способу регулирования частоты вращения ДПТ НВ изменением сопротивления в цепи якоря.
При увеличении характеристики выходят из одной точки и располагаются ниже естественной. Диапазон регулирования  . Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.
. Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.

Рис. 5.6. Механические характеристики АД при введении
добавочного сопротивления в цепь ротора
Примечание: возможно импульсное регулирование частоты вращения этим методом (рис. 5.7).

 |
|
 Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат
Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат
t1 – время замкнутого состояния ключа К;
t2 – время разомкнутого состояния ключа К.
При замыкании ключа К резистор R шунтируется и двигатель работает на естественной характеристике.
www.poznayka.org










