Доброе время суток, дорогие друзья!
Статья о измерении изоляции электродвигателей вызвала ряд вопросов у читателей. А именно о отличиях в испытаниях низковольтных и высоковольтных электродвигателей и форме оформления этих результатов. Таким образом у меня появилась возможность еще раз вернуться к вопросу оформления протоколов испытаний и измерений.
В статье для примера будет рассмотрен Протокол испытания синхронных электродвигателей до 10кВ.
Отмечу сразу, что все мои протоколы имеют одну и ту же форму и существенно отличаются лишь разделы с результатами измерений и испытаний.
Протокол имеет следующий вид:

В шапке указывается сведения о ЭТЛ (название, адрес, телефон, номер регистрационного свидетельства и место регистрации) и заказчике (наименование, объект испытаний, адрес расположения объекта и дата проведения испытаний). Далее указывается номер протокола и дата регистрации в журнале регистрации протоколов и его наименование.
Первым пунктом указываются климатические условия. Напомню температура и влажность могут оказать существенное влияние на результаты испытаний. Кроме того для сравнения результатов испытаний с предыдущими испытаниями необходимо их проводить в одинаковых климатических условиях или приводить результаты к условиям при которых проводились предыдущие испытания.
Часто важным является не сам результат измерений, а его отличие от предыдущих однотипных испытаний, по которым можно сделать определенные выводы.
Далее записываются паспортные данные электродвигателя. Это особенно важно сделать при испытаниях перед вводом в эксплуатацию, т.к. в дальнейшем пластина с паспортными данными электродвигателя может быть утеряна, закрашена, деформирована и т.д. Станет не читаемой в общем.

И вот наконец пункт: Проверка и испытания электрооборудования.
Конечно же электродвигатель должен быть заземлен. Маркировка выводов обычно такова: С1-С4; С2-С5; С3-С6 по обмоткам. Часто соединение обмоток производят внутри статора (в основном у маломощных двигателей до 1000В), тогда маркировка С1; С2; С3.
А далее измерения и испытания проводятся согласно ПУЭ при вводе оборудования в работу впервые и по ПТЭЭП – в эксплуатации.
1. Измерение сопротивления изоляции. (Об этом подробно писалось в предыдущей статье)
2. Испытание изоляции электродвигателя повышенным напряжением промышленной частоты. По ПУЭ проводится только у двигателей на напряжение выше 1000В, по ПТЭЭП по решению технического руководителя у двигателей до 1000В может не проводиться.
3. Рекомендуется после проведения испытаний повышенным напряжением проводить повторное измерение сопротивления изоляции для того чтобы убедиться что изоляция при испытаниях повышенным напряжением не была повреждена.
Так формируется таблица п.4.3. Протокола. По ее результатам делается вывод о возможности включения электродвигателя в работу без дополнительной сушки изоляции для высоковольтных двигателей.
Для информации привожу таблицу испытательных напряжений:

Вернемся к Протоколу

Теперь проводим измерение сопротивления обмоток, реостатов и пускорегулирующих резисторов постоянному току и заполняем таблицу п.4.4 Протокола. И если все параметры в норме проводим проверку работы электродвигателя на холостом ходу, а затем и под нагрузкой.
Вот собственно говоря на основание чего протокол имеет такой вид.

Исходя из того, что электродвигатели до 1000 В испытываются просто измерением изоляции и проверкой на холостом ходу и под нагрузкой, результаты их испытаний я записываю в Протокол измерения сопротивления изоляции электрооборудования, кабельных линий и электропроводок до 1000В в следующую таблицу:

Вот собственно и все.
В завершении отмечу, что в статье приведены только электрические испытания и измерения. А измерения всевозможных зазоров, вибрации и центровка опущены.
Если возникли вопросы по статье и испытаниям электродвигателей пишите.
И успехов Вам!!!
elektrolaboratoriy.ru
| АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника | Стр 1 из 2Следующая ⇒ Критерии оценок
Приложение Протокол испытаний асинхронного двигателя Таблица 1 Паспортные данные асинхронного двигателя с короткозамкнутым ротором
Таблица 2 Результаты испытаний сопротивления изоляции обмоток статора асинхронного двигателя с короткозамкнутым ротором
Таблица 3 Результаты измерений сопротивлений обмоток статора асинхронного двигателя с короткозамкнутым ротором
|
mykonspekts.ru
Министерство образования и науки России.
Государственное образовательное учреждение
Высшего профессионального образования
«Комсомольский-на-Амуре государственный технический университет»
Факультет электротехнический
Кафедра ЭМ
Отчёт по лабораторной работе №7
по дисциплине «Электрические машины»
Тема: «Испытание асинхронного двигателя с короткозамкнутым ротором»
Студенты: А. А.Калинин
А. Ю. Чернов
Группа: 9ЭЛ-1
Преподаватель: Герасименко Т.В.
2012 г.
Цель работы: приобрести практические навыки по пуску и снятию рабочих характеристик асинхронного короткозамкнутого двигателя.
Выполнение работы.
Схема лабораторной установки изображена на рисунке 1.

Рис. 1 - Схема испытаний
Паспортные данные машин – в таблице 1.
Таблица 1
| Двигатель | Генератор |
| Тип – 4АХ80Ф 4У4 | Тип – П22 М |
| Р = 1,1 кВт | Р = 0,95 кВт |
| U = 380 B | U = 220 B |
| I =2,8 А | I =5,6 А |
| n = 1400 об/мин | n = 1500 об/мин |
| η = 75% | η= 80% |
| соsφ = 0,81 | |
| f = 50Гц |
Результаты расчетов и измерений – в таблице 2.
Таблица 2
| № | Измеренные | Вычисленные | ||||||||||||
| Uф, B | Iф, А | Р1ф, Вт | UГ , B | IГ, А | nр, об/мин | РГ, Вт | Р2, Вт | Р1, Вт | η, % | соsφ, рад | n2, об/мин | s, | М2, Н∙м | |
| 1 | 226 | 2,4 | 100 | 185 | 0 | 1495 | 0 | 0 | 300 | 0 | 0,184 | 5 | 3,33 | 0 |
| 2 | 226 | 2,4 | 160 | 180 | 1,2 | 1475 | 216 | 270 | 480 | 56,25 | 0,295 | 25 | 16,67 | 1,748 |
| 3 | 228 | 2,4 | 200 | 178 | 1,8 | 1470 | 320,4 | 400,5 | 600 | 66,75 | 0,365 | 30 | 20,00 | 2,602 |
| 4 | 228 | 2,45 | 240 | 172 | 2,5 | 1465 | 430 | 537,5 | 720 | 74,65 | 0,430 | 35 | 23,33 | 3,504 |
| 5 | 228 | 2,5 | 280 | 170 | 3 | 1460 | 510 | 637,5 | 840 | 75,89 | 0,491 | 40 | 26,67 | 4,170 |
| 6 | 228 | 2,6 | 320 | 165 | 3,4 | 1455 | 561 | 701,25 | 960 | 73,05 | 0,540 | 45 | 30,00 | 4,603 |
| 7 | 228 | 2,8 | 400 | 150 | 4,8 | 1445 | 720 | 900 | 1200 | 75,00 | 0,627 | 55 | 36,67 | 5,948 |
Рабочие характеристики изображены на рисунке 2.

Рисунок 2 – Рабочие характеристики.
Пусковая характеристика изображена на рисуеке 3.

Рисунок 3 – Пусковая характеристика.
Вывод.
В данной лабораторной работе были сняты рабочие характеристики и пусковая характеристика асинхронного двигателя с короткозамкнутым ротором.
Рабочими характеристиками асинхронного двигателя называют зависимости потребляемой мощности Р2 , потребляемого тока Iф, коэффициента мощности соsφ, момента на валу М2, скольжения s и КПД η от полезной мощности Р2 при работе с номинальным напряжением и частотой.
Так как при увеличении нагрузки на валу двигателя скольжение возрастает, то число оборотов будет уменьшаться. Однако изменение скорости вращения при увеличении нагрузки от 0 до номинальной очень незначительно. Поэтому скоростная характеристика асинхронного двигателя является жесткой — она имеет очень малый наклон к горизонтальной оси. С увеличением нагрузки на валу вращающий момент также увеличивается, причем за счет некоторого уменьшения скорости ротора увеличение вращающего момента происходит быстрее, чем увеличение полезной мощности на валу. Сила тока Iф потребляемого двигателем из сети, неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе соsφ мал и ток имеет большую реактивную составляющую и очень малую активную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, а потому изменение нагрузки, т. е. изменение активной составляющей тока, вызывает незначительное изменение силы тока Iф (определяющейся в основном реактивной составляющей). При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение силы тока Iф.Изменение коэффициента мощности при изменении нагрузки на валу двигателя происходит следующим образом. При холостом ходе соsφ мал (порядка 0,2), так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу соsφ возрастает в результате увеличения активной составляющей тока статора. При увеличении Р2 относительная величина суммарных потерь уменьшается. Следовательно, должен возрастать и КПД машины.
По рабочим характеристикам по номинальному току Iфн в последней строке таблицы 2 можно найти номинальные величины P2н, nн, ηн, соsφн, значения которых примерно совпадают с паспортными данными.
studfiles.net
7
ЛАБОРАТОРНАЯ РАБОТА № 13
ИССЛЕДОВАНИЕ РИЖИМОВ ПУСКА, РЕВЕРСА И ХОЛОСТОГО ХОДА ТРЁХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
ЦЕЛЬ РАБОТЫ
1. Изучить устройство и принцип работы трёхфазного асинхронного двигателя с короткозамкнутым ротором.
2. Исследовать пусковые свойства двигателя при прямом пуске и при пуске с пониженным напряжением.
3. Освоить методику реверсов асинхронного двигателя.
4. Провести анализ эксплуатационных параметров двигателя в режиме холостого хода.
В народном хозяйстве в настоящее время около 60 % всей электроэнергии потребляется асинхронными двигателями (АД), получившими большое распространение в качестве приводных двигателей различных производственных механизмов.
АД предназначен для преобразования электрической энергии, подводимой к статорной обмотке, в механическую энергию вращения ротора.
Трёхфазный АД состоит из двух основных частей: неподвижного статора и вращающегося внутри него ротора (рис.1). Магнитопровод статора (1) представляет собой полый ферромагнитный цилиндр с продольными пазами на внутренней поверхности, набранный из отдельных тонких листов электротехнической стали. В пазах статора уложена трёхфазная обмотка, состоящая из трёх фазных одинаковых катушек, оси которых сдвинуты в пространстве по отношению друг к другу на 120º.
Начала и концы обмоток выведены на корпус машины и присоединены к зажимам, обозначенным: С1, С2, С3 – начала обмоток; С4, С5, С6 – концы обмоток. Это позволяет соединять обмотки статора как по схеме «звезда» (рис. 2, а), так и по схеме «треугольник» (рис. 2, б).
Магнитопровод статора крепится в корпусе машины, состоящем из станины и подшипниковых щитков.
Ротор АД (2) выполнен в виде цилиндра из тонких листов электротехнической стали. На внешней поверхности короткозамкнутого ротора имеются продольные пазы, в которых размещена обмотка ротора, представляющая собой алюминиевые или медные стержни, замкнутые по торцам кольцами. Такая конструкция обмотки называется «беличьим колесом»из-за внешней схожести конструкции, состоящей из медных или алюминиевых стержней, которые замкнуты с торцов двумя кольцами. Ротор закреплен на валу машины, который вращается в шариковых или роликовых подшипниках.
| | |
| а) | б) |
| Рис. 2 Схемы соединения обмоток статора: а) «звезда»; б) «треугольник» | |
В основе принципа работы асинхронного двигателя лежит закон электромагнитной индукции, т.е. физическое взаимодействие магнитного поля статора с током, наведённым этим полем в обмотке ротора.
При подключении АД к трёхфазной сети в его обмотках будет протекать синусоидальный ток, фазы которого сдвинуты относительно друг друга на 1/3 периода.
Это обстоятельства в совокупности с указанным ранее расположением обмоток (смещение в пространстве на 120о/р) приводит к образованию в магнитопроводе статора вращающееся магнитного поля.
Вращающееся магнитное поле статора с магнитным потоком Ф, пересекая силовыми линиями проводники обмоток статора и неподвижного ротора, в соответствии с законом электромагнитной индукции наводит в них ЭДC, действующие значения которых соответственно равны:
 ;
;  .
.
Поскольку обмотка ротора замкнута накоротко, под действием наведенной ЭДC E2 в ней возникнет электрический ток
 ,
,
где Z2– полное сопротивление обмоток ротора.
Согласно закону Ампера, на проводник с током, помещённый в однородное магнитное поле, действует сила, пропорциональная силе тока и индукции магнитного поля. Эта сила создаёт вращающий момент, под действием которого ротор начнёт вращаться в том же направлении что и магнитное поле статора.
Соединив ротор с валом технологической машины (насос, вентилятор и т.п.), он будет способен выполнять механическую работу. Таким образом, в электродвигателе происходит превращение электрической энергии в механическую.
Магнитное поле статора вращается в пространстве с частотой
 , об/мин.
, об/мин.
где f1– частота переменного тока, Гц;
p– число пар полюсов обмотки статора.
Промышленная частота переменного тока равна 50 периодам в 1 секунду (50 Гц). Следовательно, частота вращения вала электродвигателя зависит от числа пар полюсов (например, если p = 1, 2, 3, 4 и т.д., то на основании приведенной формулы n1 = 3000, 1500, 750, 600 об/мин и т.д.).
При этом частота вращения ротора n2 будет всегда несколько меньше частоты вращения магнитного поля статора n1, поскольку в случае их равенства для обмотки ротора перестанет действовать закон электромагнитной индукции. Отставание ротора от магнитного поля статора характеризуется параметром S, называемым скольжением
 ,
,  .
.
Поскольку ротор незначительно отстаёт от магнитного поля, значение S при номинальной нагрузке составляет обычно несколько процентов, а в режиме холостого кода – доли процента.
При вращении ротора частота и действующее значение ЭДС в обмотке ротора изменятся и будут определяться выражениями:
 ;
;  ,
,
где  – обмоточный коэффициент.
– обмоточный коэффициент.
В момент подачи напряжения на статорную обмотку n1 = 0, S = 1 и ЭДС Е2S будет максимальной. Это приведет к появлению большого тока I2, в обмотке ротора, что в свою очередь вызовет увеличение тока обмотки статора I1 для компенсации размагничивающего действия тока I2. Величина пускового тока Iпуск обычно в 5-7 раз превышает номинальное значение I1ном. Это обстоятельство вызывает кратковременную (на время разгона двигателя) перегрузку сети, что может неблагоприятно сказаться на работе других потребителей. уменьшение пускового тока может быть осуществлено временным снижением напряжения на статорной обмотке на время разгона двигателя. Этого можно добиться, например, с помощью регулируемого источника питания или путём изменения схемы подключения обмоток на время пуска (при пуске обмотки соединяются «звездой» с последующим переключением после разгона на «треугольник»).
При отсутствии механической нагрузки на валу АД в статорной обмотке течет ток холостого хода I1х , который может достигать 25...50 % от I1ном, что значительно больше, чем ток холостого хода в трансформаторе. Это объясняется наличием воздушного зазора между статором и ротором, что существенно увеличивает магнитное сопротивление магнитопровода и, следовательно, требует большего значения намагничивающей силы IW для создания магнитного потока Ф. В режиме холостого хода АД потребляет из сети активную мощность
 ,
,
которая расходуется на магнитные и механические потери, поскольку электрические потери будут пренебрежимо малыми.
Для изменения направления вращения ротора (реверса) достаточно изменить направление вращения магнитного поля. Это достигается изменением порядка следования фаз трёхфазного напряжения, для чего необходимо поменять местами две любые фазы в схеме подключения двигателя к сети.
studfiles.net
Погодин В.К. Электротехника и Электроника | 1 |
|
Кафедра « ЭЛЕКТРОТЕХНИКА»
ИСПЫТАНИЕ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТОЙ ОБМОТКОЙ РОТОРА
Цель работы: изучить нагрузочные режимы работы асинхронного двигателя с короткозамкнутой обмоткой ротора. Освоить способы пуска и снять механическую и рабочие характеристики двигателя.
Литература
Иванов И.И. и др. Электротехника. – СПб.: Лань, 2006.
Касаткин А.С., Немцов В.М. Электротехника. – М.: Энергоатомиздат, 2000.
УКАЗАНИЯ К ПРОВЕДЕНИЮ РАБОТЫ
1. На монтажной панели лабораторного стенда «Асинхронный двигатель» собрать электрическую цепь по приведённой ниже схеме и записать технические данные асинхронного двигателя.
*NB Собранная цепь должна быть проверена лаборантом или преподавателем.
2. Включить кнопки «Сеть. Включение» и «Агрегат № 1» и произвести проверку электрического нуля регулятора нагрузки двигателя «Момент» на панели стенда
«Агрегат №1».
Для этого ручку «Регулировка нагрузки» установить в крайнее левое положение,
а кнопку «Включение нагрузки» установить в положение «Регулировка нагрузки»,
после чего выполнить установку нуля регулятора нагрузки «Момент» с помощью левой ручки «Балансировка момента».
3. Включить кнопку «Включение нагрузки» и ручку регулятора нагрузки двигателя «Момент» установить в к райнем левом положении, когда тормозной момент нагрузки на валу двигателя равен нулю.
4. Произвести пуск асинхронного двигателя нажатием кнопки «Включение к сети асинхронной и синхронной машины» и провести6 опытов, изменяя с помощью ручки «Момент» регулятора нагрузки величину тормозного момента на валу двигателя от0 до5 Нм ступенями через1 Нм. Результаты записать в таблицу 1.

|
| Погодин В.К. | Электротехника и Электроника | 2 | |||||||||
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
| Таблица 1 |
| ||
|
|
| Результаты измерений |
| Результаты вычислений |
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ опыта | U1, |
| I 1 , | P 1 , |
| М, |
| n 2 , | P 2 , | s | cоs φ | η |
|
| В |
| А | кВт |
| Нм |
| 1/мин | кВт |
|
|
|
|
1 … ...6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.После окончания работы снизить тормозной момент нагрузки до нуля и отключить от сети панель стенда нажатием кнопки «Сеть. Выключение».
6.Результаты показать преподавателю, после чего разобрать электрическую цепь.
СОДЕРЖАНИЕ ОТЧЕТА
Представить в отчете все расчетные формулы, необходимые для определения величин, указанных в таблице 1.
По результатам измерений рассчитать указанные величины и заполнить таблицу 1.
*NB Все расчеты выполнять с точностью не меньшей, чем до третьей значащей цифры.
Построить рабочие характеристики асинхронного двигателя Р 1 ; I 1; M (P2) в совмещённой системе координат.
Построить энергетические характеристики асинхронного двигателя cos φ; η (P2) в совмещённой системе координат.
Построить механическую характеристику n 2 (М) .
Ответить письменно на контрольные вопросы:
1.Каковы преимущества и недостатки асинхронных электродвигателей и какова область промышленного применения этих двигателей?
2.Каковы устройство и принцип работы асинхронного двигателя с короткозамкнутой обмоткой ротора?
3.Что называют вращающимся магнитным полем и как его получают?
4.Что такое скольжение и как оно изменяется при переходе от холостого хода к
полной нагрузке?
5.Как изменить направление вращения асинхронного двигателя (реверсировать двигатель)?
6.Каковы способы пуска асинхронных двигателей? Их преимущества и недостатки?
7.Каковы способы регулирования частоты вращения асинхронных двигателей? Их преимущества и недостатки?
8.Каковы способы электрического торможения асинхронных двигателей? Их
преимущества и недостатки?
9.Как влияет понижение питающего напряжения на величину пускового, максимального и номинального моментов асинхронного двигателя?
10.Как изменяется коэффициент мощности и КПД асинхронного двигателя при переходе от холостого хода к полной нагрузке?
Вначало страницы
studfiles.net
СПОСОБ КОНТРОЛЯ ОБРЫВА СТЕРЖНЯ РОТОРА КОРОТКОЗАМКНУТОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ путем подключения обмотки статора к сети, приведения ротора во .вращение и измерения тока статора, отличающийся тем, что, с целью повышения точности контроля, из тока статора выделяют третью гармонику, измеряют пульсации ее амплитуды и по уровню пульсаций судят о наличии обрыва стержней обмотки ротора. Q @ V..-. .-.-rf-iS.; . ; I:-. Фие. f
СОЮЗ СОВЕТСНИХ
СОЦИАЛИСТИЧЕСНИХ
РЕСПУБЛИН (19) SU (1и
3 А
MD 4 01 Р 31/34
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР
ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И OTHPblTHA (21) 3594563/24-07 (22) 24.05.83 (46) 30.10.84. Бюл. Р 40 (72) M.A.Ãàøèìîâ и Н.A.Àñêåðîâ (71) Азербайджанский институт нефти и химии им. М. Азизбекова (53) 621.313 (088.8) (56) 1. Гемке Р.Г. Неисправности электрических машин. Л., "Энергия", 1975, с. 161.
2. Жерве Г.К. Промышленные испытания электрических машин ГЭИ. M. — Ë., 1959, с. 441-442.
3. Reinhardt. Методы обнаружения повреждений короткозамкнутых клеток роторов асинхронных машин. -"25.Int.
Wiss. Kollog, Ilmenau, 27-31 Okt.
1980, Heft2, Vortrag-sr, А2" ° Ilmenau S. 105-108. (54) (57) СПОСОБ КОНТРОЛЯ ОБРЫВА
СТЕРЖНЯ РОТОРА КОРОТКОЗАИКНУТОГО
АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ путем подключения обмотки статора к сети, приведения ротора во вращение и измерения тока статора, о т л и ч а юшийся тем, что, с целью повышения точности контроля, из тока статора выделяют третью гармонику, измеряют пульсации ее амплитуды и по уровню пульсаций судят о наличии обрыва стержней обмотки ротора.
1121633
Изобретение относится. к диагностике технического состояния электрических машин и может быть использован для контроля исправности стержней ротора короткозамкнутых асинхронных электродвигателей.
Эксплуатация короткозамкнутого асинхронного электррдвигателя при наличии даже одного-двух оборванных стержней в роторе приводит к дальнейшему выходу иэ строя других стержней и отказу двигателя в работе.
Известны способы проверки исправности стержней ротора асинхронных корбткозамкнутых электродвигателей, разработанные для случаев заторможенного ротора, один из которых основан на измерении IIQ окружности ротора магнитного потока рассеяния, образующегося вокруг стержней ротора при питании его переменным током пониженного напряжения, равного 20-25% номинального. На каждый паз выступающей части ротора поочередно накладывают тонкую стальную пластину, перекрывающую два зубца ротора. Чри этом . над пазами, в которых нет стержней с обрывом, пластинка притягивается и дрЕбезжит, а при наличии обрыва притяжение и дребезжание исчезают (1 ).
Известен также, способ контроля обрыва стержня ротора, при котором ротор затормаживают и в статор подают пониженнОе напряжение, равное 20-25% номинального. Затем ротор медленно проворачивают и измеряют силу тока в .статоре. При отсутствии обрыва стерж ня сила тока фазы в статоре во всех положениях ротора одинакова, а при обрыве изменяется в зависимости от положения ротора (2 .
Недостатком описанных способов является непригодность их для применения на работающих машинах.
Наиболее близким к предлагаемому является способ контроля обрыва стержня ротора короткозамкнутого асинхронного электродвигателя путем подключения обмотки статора к сети, приведения ротора во вращение и измерения тока. статора (33.
Известно, что при наличии обрыва стержня ротора в токе статора появляются гармоники, кратные частоте скольжения. Известный способ основан на измерении пульсации полного, тока статора с частотой скольжения.
Эти пульсации малы по величине, происходят не с постоянной частотой, а с частотой скольжения, зависящей от нагрузки электродвигателя, что требует подстройки контура выделения контролируемого сигнала. Все это снижает точность контроля.
Цель изобретения - повышение точности контроля.
49
55 0
Поставленная цель достигается тем, что по способу контроля обрыва стержня ротора короткозамкнутого асинхронного двигателя путем подключения обмотки статора к сети, приведения ротора во вращение и измерения тока статора, из тока статора выделяют третью гармонику, измеряют пульсации ее амплитуды и по уровню пульсаций судят о наличии обрыва стержней обмотки ротора.
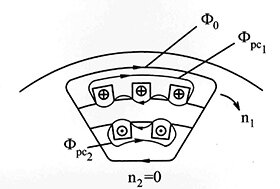
Физическая сущность изобретения основана на взаилюдействии (интерференции), возникающем при обрыве стержня (несимметрии обмотки ротора), между магнитныи потоком обратных токов третьей. гармоники ротора н магнитным потоком третьей гармоники статора.
Наличие в фазных величинах обмотки статора третьей гармоники (и кратных ей гармоник) обусловлено насыщением магнитной системы основным потоком намагничивания, определяемым величиной намагничивающего тока машины. Ток намагничивания и соответствующий ему основной поток намагничивания при изменении нагрузки от нуля до номинальной величины практически не изменяются. Остается постоянной и третья гармоника, обусловленная насыщением магнитной системы указанным потоком. Ври этом результирующий поток от третьей гармоники в пространстве отсутствует, так как в условиях симметричности трехфазной обмотки и при нагружении ее симметричными токами в любой момент времени намагничивающие силы, созданнйе токами третьей гармоники, совпадают цо фазе и их сумма равна нулю. Однако электрическая несимметрия обмотки ротора при обрыве стержня определенным образом обуславливает несимметрию третьих гармоник в фазных величинах обмотки статора. В таком случае намагничивающие силы, созданные токами третьей гармоники статора, в трех фазах представляют уже несимметричную систему и их сумма не равняется нуmo. Благодаря этому в пространстве появляется результирующий поток частоты ЗХ„ (f., — частота сети), вращающийся в йаправлении вращения потока основной гармоники.
1 для заданной степени исследуемой неисправности можно принять, что величина результирующего потока от третьих гармочик в фазах обмотки статора, обусловленных потоком намагничивания, практически остается постоянной так же, как и сам поток намагничивания, при изменении нагрузки машины от нуля для номинальной величины. Не изменяется также ЭДС индуцирования результирующим потоком третьей гармоники в обмотке статора.
Величина ЭДС третьей гармоники,.ин1121633 дуцированная в обмотке ротора ука.занным результирующим потоком, зависит уже от скольжения ротора. Таким образом, несмотря на постоянство ЭДС третьей гармоники в обмотке статора, величина этой ЭДС в обмотке ротора изменяется при изменении нагрузки от нуля до номинальной величины. При нагрузке из-за увеличения скольжения величина указанной ЭДС увеличивается и ее интерференция должна. усилить !О пульсацию третьей гармоники в обмотке статора. Что касается результируюшего потока первой гармоники, то, как известно, его величина по сравнению с величиной результируюшего 15 потока третьей гармоники несоизмеримо велика. Кроме того, в отличие от третьей гармоники, величина реэультируюшего потока первой гармоники не остается постоянной, а изменяется в соответствии с изменением нагрузки от нуля до номинальной величины.
Поэтому незначительная электрическая несимметрия короткоэамкнутой обмотки ротора в виде беличьей клетки (обрыв одного-двух стержней) не может вызвать большую пульсацию этой гармоники.
Проведено экспериментальное диагностическое исследование укаэанной неисправности ротора в ряде короткозамкнутых асинхронных электродвигателей. Искусственно задан обрыв стержня ротора (путем сверления стержня в пазу) и по предлагаемому способу осуществлен контроль за маши- 35 ной путем гармонического анализа и осциллографирования Фазных величин (тока и напряжения) и их гармонических составляюших.
На фиг.1-6 приведены осциллограм- 4() мы (симметричная половина) при холостом ходе (фиг.1, 3 и 5) и нагрузке (фиг.2, 4 и S) соответственно полно- го разного тока (фиг.1 и 2), его первой (фиг.3 и 4) и третьей (фиг.5 и 6) 15 гармоник, снятые на асинхронном электродвигателе при обрыве двУх стержней (один иэ которых неполностью высверлен) в пазах ротора; на фиг.7, 8 и 9 — кривые, показывающие характер изменения пульсаций соответственно
Фазного тока, его первой и третьей гармонических составляющих при.холостом ходе (кривые 1) и нагрузке (кривые 2).
Кривые 1 и 2 получены соответст- 55 венно из осциллограмм .фиг. -6 путем обработки их в долях относительных величин осциллографированных токов. При обработке принято, что .А = 2 +A А о А -А
Ац где А „, А„„.„- максимальные и минимальные размахи амплитуд осциллографированных величин.
Для простоты точки, характеризующие вершины пульсаций, соединены прямыми линиями.
Как показывает анализ полученных результатов, при сравнительно малой степени исследуемой неисправности (обрыв одного-двух стержней) пульсация тока фазы фиг.7 и его первой гармоники (фиг.8.) в режиме холостого хода (кривые 1)практически отсутствует. Слабо проявляется пульсация укаэанных величин также в режиме нагрузки машины (кривые 2, фиг.7 и 8), В значительной степени проявляется пульсация третьей гармоники в режиме нагрузки машины (йиг.9, кривые 2) °
При этом пульсация укаэанной гармоники четко проявляется и на измерительной шкале анализатора гармоник, Амплитуда (или размах) пульсации выделенной третьей гармоники почти в
3,5 раза больше, чем амплитуда пульсации тока фазы. При этом амплитуда пульсации первой гармоники несоизмеримо мала по сравнению с пульсацией третьей гармоники.
Таким образом, пульсация третьей гармоники в фазных величинах обмотки статора является наиболее информативньм диагност.:::еским признаком (параметром ) обрыва стержней асинхронной машины, на котором основано изобретение.
Предлагаемый способ по сравнению с прототипом позволяет более эффективно контролировать состояние стержней ротора, так как пульсация третьей гармоники в большей степени зависит от обрыва стержня, чем пульсация первой гармоники и полной фаэной величины; дает возможность контролировать состояние стержней при работе машины под нагрузкой; может быть использован для определения неисправности стержней при питании обмотки статора пониженным напряжением, равным 20-25% номинального; путем мед- ленного проворачивания ротора (т.е. имитации больших скольжений ) на профилактических испытаниях асинхронных двигателей без их разборки; позволя-, ет не только констатировать факт наличия обрыва, но и определить число оборванных стержней (по числу пиков пульсаций за один оборот ротоРа), а также степень обрыва (по амплитуде пульсаций).
1121633
1121633
0f
-02
Составитель В. Никаноров
Техред Н.Коцибн к Еорректор В. Бутяга
Редактор И.Рыбченко
Заказ 7976/36 Тираж 710 Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП "Патент", r. Ужгород, ул. Проектная, 4





www.findpatent.ru