





Этот способ регулирования в отличие от предыдущего позволяет осуществить изменение частоты вращения только ступенями. Он используется в таких механизмах, как воздуходувки, транспортеры, подъемники, лифты. Двигатели с переключением числа пар полюсов называют многоскоростными. Обычно многоскоростные асинхронные двигатели выполняются с двумя, тремя и четырьмя ступенями скоростей. Двухскоростные двигатели изготавливаются с одной обмоткой, если числа пар полюсов соответствуют следующему отношению:
 .
.
Трех- и четырехскоростные двигатели выпускаются с двумя обмотками. В трехскоростных двигателях только одна обмотка выполняется с переключением числа пар полюсов , а в четырехскоростных обе обмотки выполняются как двухскоростные. Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора.
Изменение числа полюсов осуществляется путем изменения схемы соединения секций обмотки статора. На рис. 4.29 показаны три варианта соединения секций.
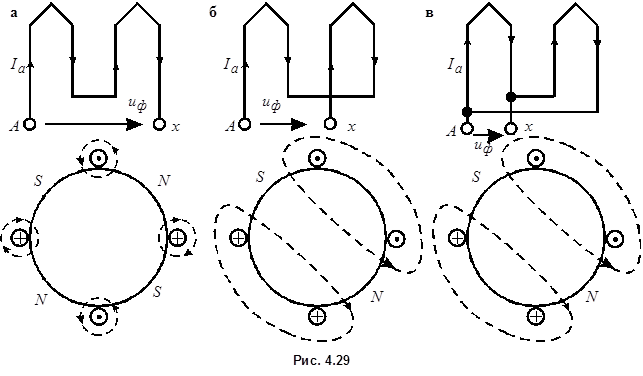 |
Вариант «а» соответствует последовательному согласному включению секций, при этом образуется магнитное поле с  полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет
полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет  полюса. Мощность обмотки остается неизменной,
полюса. Мощность обмотки остается неизменной,  , а момент, развиваемый двигателем, снижается в два раза,
, а момент, развиваемый двигателем, снижается в два раза,  . В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь полюса, но мощность обмотки
. В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь полюса, но мощность обмотки  возрастает в два раза, а момент двигателя остается постоянным
возрастает в два раза, а момент двигателя остается постоянным 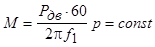 .
.
 |
Таким образом, для изменения числа пар полюсов в отношении  необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов
необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов  , при изменении направления тока в одной из них число полюсов уменьшается вдвое,
, при изменении направления тока в одной из них число полюсов уменьшается вдвое,  . При переключении числа полюсов с
. При переключении числа полюсов с  на
на  полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
Так как чередование фаз для обеих скоростей должно оставаться одинаковым, то кроме изменения направления токов в зонах  необходимо поменять местами две фазы обмотки. При большем числе полюсов обмотка выполняется с диаметральным шагом
необходимо поменять местами две фазы обмотки. При большем числе полюсов обмотка выполняется с диаметральным шагом  . Тогда при меньшем числе полюсов
. Тогда при меньшем числе полюсов  .
.
Малый шаг приводит к ухудшению использования обмотки и, следовательно, к некоторому снижению технико-экономических показателей двигателя.
Многоскоростные двигатели проектируются для различных режимов работы. Наиболее часто встречаются режимы с постоянным моментом  и с постоянной мощностью
и с постоянной мощностью  . Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис. 4.31).
. Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис. 4.31).
При таком переключении в два раза возрастает потребляемый из сети ток, а следовательно, и мощность двигателя  , момент же при этом не меняется.
, момент же при этом не меняется.
 |
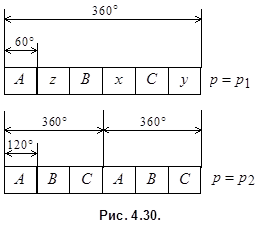
Если до переключения обмотка статора была соединена в треугольник (рис. 4.32), то после переключения ее на двойную звезду мощность двигателя практически не изменится, а момент уменьшится в два раза из-за увеличения частоты вращения.
 |
poznayka.org
В целом эти двигатели имеют жесткие механические характеристики, повышенный пусковой момент и меньшую кратность пускового тока, чем двигатели с короткозамкнутым ротором обычной конструкцией.
При работе многих механизмов, приводящихся во вращение асинхронными двигателями, в соответствии с технологическими требованиями возникает необходимость регулировать скорость вращения этих механизмов. Способы регулирования частоты (скорости) вращения асинхронных двигателей раскрывает соотношение:
 .
.
Отсюда следует, что при заданной нагрузке на валу частоту вращения ротора можно регулировать:
Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение (рис. 2.21).
На рис. 2.21 приведены механические характеристики асинхронного двигателя при разных сопротивлениях регулировочного реостата Rр3>Rр2>0, Rр1=0.
Рис. 2.21
Как следует из рис. 2.21 при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа:
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
Эти двигатели (многоскоростные) имеют более сложную обмотку статора, позволяющую изменять ее число пар полюсов, и короткозамкнутый ротор. При работе асинхронного двигателя необходимо, чтобы обмотки ротора и статора имели одинаковое число пар полюсов. Только короткозамкнутый ротор способен автоматически приобретать то же число пар полюсов, что и поле статора. Многоскоростные двигатели нашли широкое применение в приводе металлорежущих станков. Нашли применение двух, трех и четырех скоростные двигатели.
На рис. 2.22 показана схема соединения и магнитное поле статора двигателя при последовательном (б) и параллельном (а) соединении полуобмоток.

Рис. 2.22
У двухскоростного двигателя обмотка каждой фазы состоит из двух полуобмоток. Включая их последовательно или параллельно можно в 2 раза изменять число пар полюсов.
У четырехскоростного двигателя на статоре должно размещаться две независимые обмотки с разным числом пар полюсов. Каждая из обмоток позволяет в два раза изменять число пар полюсов. Например, у двигателя, работающего от сети c частотой f=50 Гц, со следующими частотами вращения 3000/1500/1000/500 [об/мин] с помощью одной из обмоток статора можно получить частоту вращения 3000 об/мин и 1500 об/мин (при этом р=1 и р=2). С помощью другой из обмоток можно получить частоту вращения 1000 об/мин и 500 об/мин (при этом р=3 и р=6)..
При переключении числа пар полюсов изменяется и магнитный поток в зазоре, что приводит к изменению критического момента Мкр (рис. 2.23 б). Если при изменении числа пар полюсов одновременно изменять и подведенное напряжение, то критический момент может остаться неизменным (рис. 2.23 а). Поэтому при этом способе регулирования могут быть получены два вида семейства механических характеристик (рис. 2.23).
Достоинства этого способа регулирования: сохранение жесткости механических характеристик, высокий К.П.Д. Недостатки: ступенчатое регулирование, большие габариты и большая стоимость двигателя.
Рис. 2.23
vunivere.ru
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.

Однофазные же двигатели управляются:
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.

Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.

Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, к
tanders.ru










