





Изобретение относится к области автоматики и измерительной техники. Изобретение решает задачу автоматизации промышленных испытаний асинхронных двигателей (АД) и электроприводов (ЭП) на их базе, повышает качество испытаний. При измерении скольжения асинхронных двигателей в качестве информационного сигнала используется сигнал постоянного напряжения, который масштабируют, инвертируют, после чего суммируют с сигналом опорного напряжения, значение которого определяют при синхронном вращении, полученную сумму усиливают до величины, пригодной для измерения, измеряют и по измеренной величине определяют скольжение асинхронного двигателя. Технический результат - повышение помехоустойчивости, точности измерения, сокращение времени и возможность автоматизации процесса испытаний. 1 ил.

Изобретение относится к области автоматики и измерительной техники. Изобретение решает задачу автоматизации промышленных испытаний асинхронных двигателей (АД) и электроприводов (ЭП) на их базе, повышает качество испытаний.
Известен способ амперметра постоянного тока, предполагающий для измерения частоты тока ротора применение амперметра постоянного тока и шунта, введенного в одну из фаз ротора (см. Жерве Г.К. Промышленные испытания электрических машин. - 4-е изд., сокр. и перераб. - Л.: Энергоатомиздат. Ленингр. отд-ние, 1984 г.), применяемый только для АД с фазным ротором и постоянно налегающими щетками. Частота ротора f2 вычисляется как отношение числа полных колебаний стрелки прибора к промежутку времени, за который эти колебания совершались:

где N - число полных колебаний стрелки;
t - промежуток времени за который совершались колебания.
Величина скольжения s определяется отношением частот ротора и статора:

где f1 - частота тока статора АД.
Недостатком является то, что данный способ невозможно применить при испытаниях АД с короткозамкнутым ротором, а также необходимостью измерения частоты сети питания АД дополнительным прибором.
Наиболее близким к предлагаемому по существу и решаемой задаче является способ, предполагающий использование газоразрядной лампы для создания стробоскопического эффекта (см. Жерве Г.К. Промышленные испытания электрических машин. - 4-е изд., сокр. и перераб. - Л.:Энергоатомиздат. Ленингр. отд-ние, 1984 г.). Стробоскопический эффект получается при освещении газоразрядной лампой диска с зачерненными секторами на торце вала испытуемой машины. Количество зачерненных секторов зависит от полюсности машины. Газоразрядная лампа подключается к сети питания АД. Скольжение s находится как отношение удвоенного числа оборотов диска при освещении газоразрядной лампой к промежутку времени, за который зачерненный диск совершал обороты.

где N - число оборотов диска с зачерненными секторами;
t - промежуток времени, за который проводился отсчет оборотов.
Недостатком указанного способа является то, что для осуществления измерения необходимо некоторое время, которое может составлять 10-15 с, за это время ротор испытуемого АД нагревается при испытаниях в режиме перегрузки, а также при проведении испытаний двигателей с большой величиной скольжения, что приводит к изменению величины скольжения во время замера скольжения, что в свою очередь приводит к ошибкам в измерении скольжения. Недостатками является также то, что при большой величине скольжения возникают трудности при отсчете оборотов зачерненного диска, что также влияет на точность результата.
Задачей, решаемой изобретением, является повышение помехоустойчивости, точности измерения, сокращение времени для осуществления измерения и возможность автоматизации процесса испытания АД.
Решение поставленной задачи достигается тем, что в качестве информационного сигнала используют сигнал постоянного напряжения, который масштабируют, инвертируют, после чего суммируют с сигналом опорного напряжения, значение которого определяют при синхронном вращении, полученную сумму усиливают до величины, пригодной для измерения, измеряют и по измеренной величине определяют скольжение асинхронного двигателя.
По сравнению с наиболее близким аналогом заявленное решение имеет отличительные черты:
- использование в качестве информационного - сигнала постоянного напряжения;
- использование в качестве опорного - сигнала постоянного напряжения, определяемого при синхронном вращении вала испытуемого АД;
- применение преобразователя постоянного напряжения с эффектом Холла;
- применение операции аналогового суммирования.
При использовании предлагаемого способа повышается помехоустойчивость, что обусловлено использованием в качестве информационного сигнала сигнала постоянного напряжения, уменьшается время, необходимое для осуществления измерения скольжения, за счет использования сумматора аналоговых сигналов.
Примером реализации предложенного способа является устройство, блок-схема которого поясняется чертежом, на котором изображено устройство для измерения скольжения, содержащее датчик скорости 1, преобразователь постоянного напряжения с эффектом Холла 2, инвертирующий усилитель 3, аналоговый сумматор 4, усилитель выходного сигнала 5.
Способ измерения скольжения АД заключается в следующих действиях: датчиком скорости 1 преобразуют частоту вращения вала n АД в напряжение UТГ, сигнал UТГ масштабируют преобразователем постоянного напряжения 2. С выхода преобразователя сигнал UДНХ подают на инвертирующий усилитель 3, затем на первый вход сумматора 4. На второй вход сумматора 4 подают опорное напряжение Uопор, величину которого определяют при синхронном вращении вала АД так, чтобы выходное напряжение сумматора U1 стремилось к нулю справа. Выходное напряжение сумматора поступает на вход выходного усилителя 5, которое затем измеряют с помощью вольтметра постоянного тока.
Величину скольжения определяют по формуле

где k2 - коэффициент усиления выходного усилителя,
U2 - напряжение, измеряемое вольтметром постоянного тока.
При этом величина опорного напряжения Uопор устанавливается при
синхронном вращении испытуемой машины так, чтобы выполнялось условие

и при проведении испытаний АД подается на второй вход сумматора аналоговых сигналов.
Величина коэффициента усиления выходного усилителя выбирается таким образом, чтобы напряжение U2 находилось в пределах от 35 до 95% шкалы прибора, измеряющего U2, или от 35 до 95% максимального напряжения, измеряемого аналого-цифровым преобразователем, выполняющим функции вольтметра.
Помехоустойчивость достигается за счет использования в качестве информационного сигнала сигнала постоянного напряжения. Точность измерения достигается за счет осуществления операции над информационным сигналом на аналоговом уровне, обусловлена погрешностью измерения U2, точностью задания опорного напряжения Uопор и определяется формулой

Использование предлагаемого способа для промышленных испытаний АД позволяет автоматизировать процесс испытаний, повысить помехоустойчивость и точность измерения величины скольжения.
Формула изобретения
Способ измерения скольжения асинхронных двигателей, отличающийся тем, что в качестве информационного сигнала используют сигнал постоянного напряжения, поступающий с датчика скорости, преобразующего скорость вращения вала асинхронного двигателя в постоянное напряжение, который масштабируют преобразователем постоянного напряжения с эффектом Холла, инвертируют, подавая сигнал на инвертирующий вход сумматора, после чего суммируют с сигналом опорного напряжения UОПОР, значение которого определяют при синхронном вращении вала испытуемого асинхронного двигателя так, чтобы выходное напряжение сумматора стремилось к нулю справа, и подают на неинвертирующий вход сумматора, выходное напряжение которого подают на вход выходного усилителя, затем измеряют с помощью вольтметра постоянного тока и определяют скольжение s асинхронного двигателя по формуле s=[U 2/(к2 ·UОПОР )]100%, где к2 - коэффициент усиления выходного усилителя, U2 - напряжение, измеряемое вольтметром постоянного тока.
РИСУНКИ

www.findpatent.ru
Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины скольжения электродвигателя.
Известны следующие способы определения скольжения (ГОСТ 7217-87 (2003) Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний. - Введ. 1988-01-01. - М.: Изд-во стандартов, 1987. - 53 с.:
- стробоскопический способ: для этого на валу двигателя наносят метки, число которых равно числу пар полюсов. Освещая вал стробоскопической лампой, питаемой от той же сети, что и испытуемый двигатель, измеряют время прохождения определенного количества меток мимо неподвижного указателя, считая прохождение метки в момент пуска секундомера за нулевое. Скольжение s находится как отношение удвоенного числа оборотов диска при освещении газоразрядной лампой к промежутку времени, за который зачерненный диск совершал обороты;
- способ определения скольжения при помощи индуктивной катушки: катушку размещают у торца двигателя, предварительно определив положение, при котором стрелка гальванометра совершает наиболее заметные качания, и измеряют время определенного количества колебаний.
Указанные способы малопригодны для их использования в рабочем режиме, так как требуют установки вблизи высоковольтной обмотки статора или на валу асинхронного электродвигателя дополнительных устройств. Поэтому они нашли применение только при проведении испытаний на выведенном в ремонт двигателе.
В качестве прототипа принят «Способ определения скольжения ротора асинхронного электродвигателя» (патент Российской Федерации на изобретение №2441249, МПК G01R 31/34, 2012), включающий оценку величины скольжения ротора, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, выделение с помощью двух полосовых фильтров основной гармоники и высокочастотной составляющей сигнала потребляемого тока, в которой имеются зубцовые гармонические ротора (ЗГР) первого порядка, вычисление по основной гармонике частоты сети, определение границы диапазонов для поиска частот, обусловленных зубцовыми гармоническими ротора первого порядка, исключение из диапазонов частот, вызванных насыщением магнитопроводов ротора и датчика тока, нахождение частот зубцовых гармонических первого порядка, по которым получают два значения скольжения ротора, определяют скольжение ротора асинхронного электродвигателя по среднему арифметическому данных значений и делают заключение о достоверности результата путем сравнения двух величин скольжения, вычисленных по частотам ЗГР первого порядка.
Недостатками этого способа являются необходимость получения информации о числе стержней обмотки ротора. На многих работающих двигателях (особенно старого образца) ее можно получить только путем разборки двигателя, и то, что для достижения высокой точности измерения скольжения требуется значительное время записи сигнала, вплоть до нескольких минут. За это время может произойти изменение нагрузки, смещение датчика и ряд других явлений, приводящих к потере точности измерения.
Техническим результатом предлагаемого изобретения является повышение точности получаемого результата, при равных значениях времени записи сигнала, и помехозащищенности, при одинаковых допустимых погрешностях измерения.
Технический результат достигается тем, что в способе определения скольжения ротора асинхронного электродвигателя, включающем оценку величины скольжения ротора, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, с помощью быстрого преобразования Фурье получают амплитудный спектр зарегистрированного сигнала, определяют максимум амплитудного спектра и соответствующую ему частоту, которая близка по значению к частоте сети, с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения определяют точное значение частоты сети, по полученному значению частоты сети и числу пар полюсов электродвигателя вычисляют границы одного диапазона частот для двигателей с одной парой полюсов, либо двух диапазонов для двигателей с числом пар полюсов большим одного на амплитудном спектре, на каждом из полученных диапазонов определяют максимум амплитудных спектров и соответствующие им частоты, которые близки по значению к частотам гармоник от эксцентриситета ротора первого порядка, с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения определяют точные значения частот гармоник от эксцентриситета ротора первого порядка, по которым получают для двигателей с одной парой полюсов одно значение скольжения, которое является для данных двигателей конечным результатом, а для двигателей с двумя и более парами полюсов - два значения скольжения ротора, вычисляют скольжение ротора такового асинхронного электродвигателя по среднему арифметическому данных значений.
Сущность способа заключается в следующем.
Известно, что магнитное поле в воздушном зазоре асинхронного двигателя изменяется не строго по синусоидальному закону, поэтому при разложении в ряд Фурье токового сигнала в нем обнаруживаются гармоники, имеющие частоту, отличную от частоты питающей сети. Согласно (Геллер Б., Гамата В. Высшие гармоники в асинхронных машинах / Пер. с англ. Под ред. З.Г. Каганова. - М.: Энергия, 1981. - 352 с., ил.) источниками временных гармоник магнитного поля в воздушном зазоре, которые несут информацию о скольжении, являются зубчатость ротора и дискретное расположение стержней по обмотке ротора, а также эксцентриситет ротора.
Эксцентриситет ротора обусловлен неточностями в процессе производства и сборки, а также износом механической части двигателя. Он бывает статическим и динамическим, однако в реальных двигателях всегда присутствуют оба вида эксцентриситета, что является причиной появления гармоник эксцентриситета ротора. Так как эти гармоники всегда присутствуют в магнитном поле тока статора, то по ним возможно определение скольжения.
В прототипе предлагается для определения скольжения рассчитывать частоты ЗГР первого порядка и по значению полученных частот определять скольжение.
Однако определение скольжения по частотам гармоник эксцентриситета ротора (ГЭР) первого порядка имеет существенные преимущества, одно из которых является исключение из списка исходных данных труднодоступных параметров (числа стержней ротора). Из конструктивных параметров требуется всего один - число пар полюсов, который легко определяется по значению синхронной частоте вращения ротора.
Единственным недостатком определения скольжения по ГЭР является то, что требуется очень большое время записи сигнала для точного определения частоты. Например, согласно (Скоробогатов А.А. Разработка методов контроля состояния короткозамкнутых обмоток роторов электродвигателей собственных нужд электростанций, диссертация на соискание ученой степени кандидата технических наук, Иваново, 2006) для определения скольжения высоковольтных электродвигателей с погрешностью не более 5% минимальное время записи составляет порядка нескольких минут).
Заявленный способ позволяет определять значение скольжения по ГЭР первого порядка, присутствующим в токе статора, за малый промежуток времени записи без потери точности. Кроме того, в отличие от прототипа не требуется труднодоступная информация о числе стержней обмотки ротора.
В предлагаемом способе определение скольжения ротора асинхронного электродвигателя осуществляют путем регистрации мгновенной величины потребляемого электродвигателем тока J(t) во времени посредством датчика тока, установленного на одну из фаз кабеля питания электродвигателя, и последующей обработки токового сигнала.
Зарегистрированный токовый сигнал J(t) кроме основной гармоники также содержит гармоники, обусловленные ГЭР первого порядка. Частоты их зависят от параметров двигателя и могут быть определены по следующему выражению:

где  - гармоники ГЭР первого порядка, fc - частота сети, s - скольжение, p - число пар полюсов, fp - частота вращения ротора.
- гармоники ГЭР первого порядка, fc - частота сети, s - скольжение, p - число пар полюсов, fp - частота вращения ротора.
Уменьшить временя записи тока без потери точности определения ГЭР первого порядка и частоты сети, необходимых для определения скольжения, позволяет способ автокоррекции времени записи сигнала (АВЗС), описанный в (А.Н. Назарычев, А.А. Скоробогатов, Е.М. Новоселов, С.Н. Литвинов.Повышение эффективности определения частотных составляющих при спектральном анализе сигналов / Вестник ИГЭУ; вып.5, - Иваново: ИГЭУ, 2013. С.29-37.
Тогда значение скольжения при определенных значениях частот ГЭР первого порядка и частоты сети определяется по выражениям:



Перечень графических иллюстраций применения предлагаемого способа:
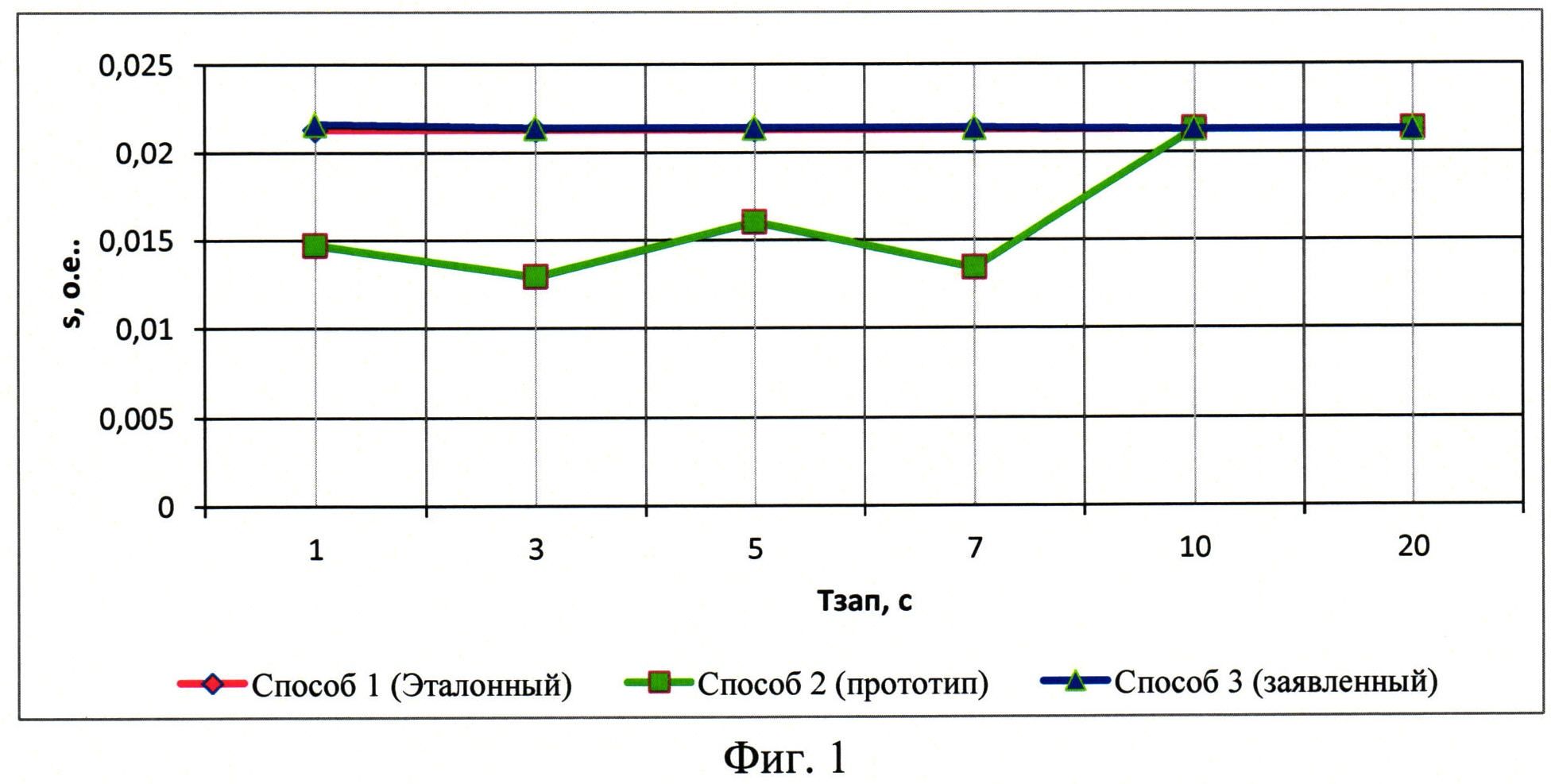
Фиг.1. - Зависимость точности определения скольжения от времени записи сигнала рассматриваемыми способами при нагрузке 0.5 PHOM;
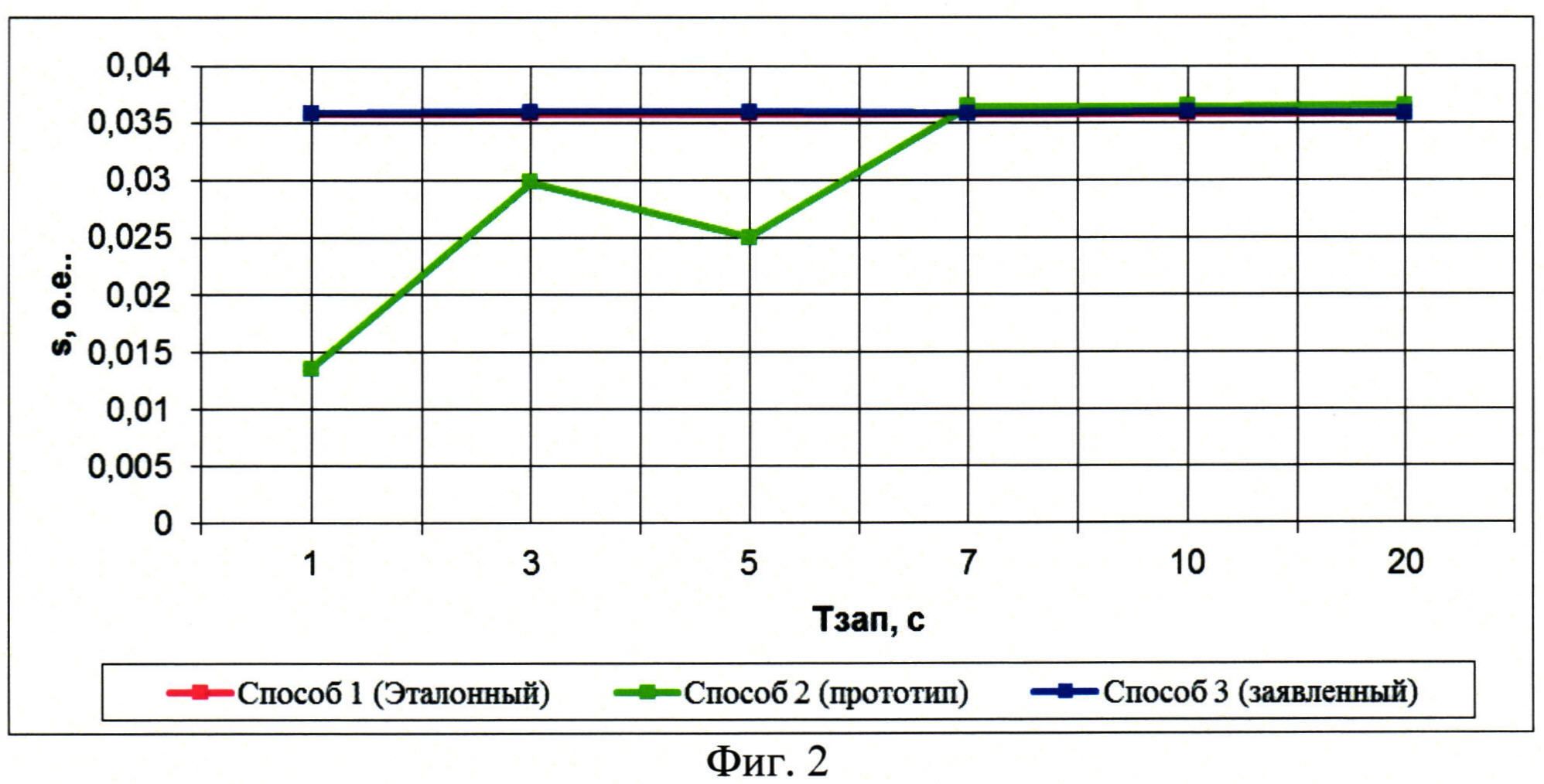
Фиг.2. - Зависимость точности определения скольжения от времени записи сигнала рассматриваемыми способами при нагрузке 1.0 PHOM.
Способ реализуется следующим образом. Посредством датчика тока, установленного на одну из фаз кабеля питания электродвигателя, осуществляют запись токового сигнала J(t). Сигнал J(t) потребляемого электродвигателем тока оцифровывают, затем формируют вектор амплитудного спектра, по максимуму амплитуды тока определяют частоту сети. При числе пар полюсов p>1 скольжение определяется следующим образом. Формируют два диапазона частот, границы которых определяются при скольжениях s=0 и s=1.5sном, где sном - номинальное скольжение электродвигателя, 1.5sном - максимальное значение скольжения с учетом перегрузки и допустимого отклонения скольжения от номинального при номинальной нагрузке машины.
Первый диапазон:
 где
где  - частота, соответствующая верхней границе первого диапазона, sном - номинальное скольжение электродвигателя;
- частота, соответствующая верхней границе первого диапазона, sном - номинальное скольжение электродвигателя;
 где
где  - частота, соответствующая нижней границе первого диапазона.
- частота, соответствующая нижней границе первого диапазона.
Второй диапазон:
 где
где  - частота, соответствующая верхней границе второго диапазона;
- частота, соответствующая верхней границе второго диапазона;
 где
где  - частота, соответствующая нижней границе второго диапазона.
- частота, соответствующая нижней границе второго диапазона.
В данных диапазонах находят частоты, обусловленные ГЭР первого порядка, имеющие наибольшую амплитуду, а также частоту сети с использованием способа АВЗС.
По двум частотам ГЭР первого порядка осуществляют расчет двух величин скольжения ротора. По среднему арифметическому данных величин вычисляют скольжение ротора асинхронного электродвигателя:



При p=1 скольжение определяется только по выражению:

Пример 1. Способ определения величины скольжения ротора асинхронного электродвигателя изначально реализован на базе персонального компьютера и опробован на асинхронном электродвигателе.
Паспортные данные двигателя: Рном=250 Вт - номинальная нагрузка; Zp=19 - число зубцов ротора; p=1 - число пар полюсов.
Для создания нагрузки на валу электродвигателя и возможности ступенчатого ее изменения к экспериментальному двигателю был присоединен с помощью муфты генератор постоянного тока. Запись сигнала осуществлялась с помощью датчика тока, расположенного на одной из фаз питающего кабеля электродвигателя, при следующих нагрузках на валу ротора: 0,5РНОМ и РНОМ, где РНОМ - номинальная мощность асинхронного двигателя. Сигнал оцифровывают с помощью аналого-цифрового преобразователя (АЦП).
Для измерения частоты сети используется частотомер Ф5043, подключенный на линейное напряжение. Погрешность его измерений составляет ± 0,1% для диапазона 45-55 Гц. Частоту вращения вала ротора электродвигателя определяют с помощью оптического тахометра АТ-8. Погрешность его измерений составляет 0,05%.
В ходе исследования на экспериментальном двигателе было произведено измерение скольжения следующими способами:
1. Способ №1 (эталонный способ). В данном способе определяли значение скольжения, принимаемое за эталонное (точное). Для этого с помощью оптического тахометра определялось значение частоты вращения ротора, а с помощью частотометра - значение частоты питающей сети. Инструментальная погрешность данного способа составляет примерно 4% при номинальной нагрузке двигателя (Рном) и 8% при нагрузке 0,5 от номинальной (0,5·Рном).
2. Способ №2 (способ-прототип). Второй способ позволяет определить скольжение по значениям ЗГР первого порядка и частоты питающей сети, присутствующими в токе статора. Данный способ является прототипом разрабатываемого.
3. Способ №3 (заявленный способ). Третий способ позволяет определить скольжение по значению ГЭР первого порядка, и частоты питающей сети, присутствующими в токе статора, с применением алгоритма АВЗС.
Измерения проводились при различных нагрузках на валу ротора. Частота дискретизации АЦП 10 кГц. Продолжительность времени записи сигнала изменялась от 1 до 20 с.
Результаты определения скольжения по указанным способам приведены в табл.1-2. Для наглядности на фиг.1-2 также представлены зависимости изменения точности определения скольжения от величины времени записи сигнала при различной нагрузке на валу ротора.
Анализ полученных результатов показал следующее:
1. Уменьшение времени записи приводит к заметному снижению точности определения скольжения и частоты вращения ротора по ЗГР и ГЭР без применения алгоритма АВЗС. Данный факт особенно заметен при длительностях времени записи сигнала, не превышающих 10 с. Значения погрешностей определения указанных выше параметров значительно превосходят значения инструментальных погрешностей, обусловленные погрешностями измерительных приборов.
2. Уменьшение времени записи вплоть до 1 с не оказало значительного влияния на результат измерения при определении скольжения и частоты вращения ротора по ГЭР с применением алгоритма АВЗС. Значения погрешностей определения указанных выше параметров не превышают значения инструментальных погрешностей.


edrid.ru
Изобретение относится к области автоматики и измерительной техники. Изобретение решает задачу автоматизации промышленных испытаний асинхронных двигателей (АД) и электроприводов (ЭП) на их базе, повышает качество испытаний. При измерении скольжения асинхронных двигателей в качестве информационного сигнала используется сигнал постоянного напряжения, который масштабируют, инвертируют, после чего суммируют с сигналом опорного напряжения, значение которого определяют при синхронном вращении, полученную сумму усиливают до величины, пригодной для измерения, измеряют и по измеренной величине определяют скольжение асинхронного двигателя. Технический результат - повышение помехоустойчивости, точности измерения, сокращение времени и возможность автоматизации процесса испытаний. 1 ил.


Изобретение относится к области автоматики и измерительной техники. Изобретение решает задачу автоматизации промышленных испытаний асинхронных двигателей (АД) и электроприводов (ЭП) на их базе, повышает качество испытаний.
Известен способ амперметра постоянного тока, предполагающий для измерения частоты тока ротора применение амперметра постоянного тока и шунта, введенного в одну из фаз ротора (см. Жерве Г.К. Промышленные испытания электрических машин. - 4-е изд., сокр. и перераб. - Л.: Энергоатомиздат. Ленингр. отд-ние, 1984 г.), применяемый только для АД с фазным ротором и постоянно налегающими щетками. Частота ротора f2 вычисляется как отношение числа полных колебаний стрелки прибора к промежутку времени, за который эти колебания совершались:

где N - число полных колебаний стрелки;
t - промежуток времени за который совершались колебания.
Величина скольжения s определяется отношением частот ротора и статора:

где f1 - частота тока статора АД.
Недостатком является то, что данный способ невозможно применить при испытаниях АД с короткозамкнутым ротором, а также необходимостью измерения частоты сети питания АД дополнительным прибором.
Наиболее близким к предлагаемому по существу и решаемой задаче является способ, предполагающий использование газоразрядной лампы для создания стробоскопического эффекта (см. Жерве Г.К. Промышленные испытания электрических машин. - 4-е изд., сокр. и перераб. - Л.:Энергоатомиздат. Ленингр. отд-ние, 1984 г.). Стробоскопический эффект получается при освещении газоразрядной лампой диска с зачерненными секторами на торце вала испытуемой машины. Количество зачерненных секторов зависит от полюсности машины. Газоразрядная лампа подключается к сети питания АД. Скольжение s находится как отношение удвоенного числа оборотов диска при освещении газоразрядной лампой к промежутку времени, за который зачерненный диск совершал обороты.

где N - число оборотов диска с зачерненными секторами;
t - промежуток времени, за который проводился отсчет оборотов.
Недостатком указанного способа является то, что для осуществления измерения необходимо некоторое время, которое может составлять 10-15 с, за это время ротор испытуемого АД нагревается при испытаниях в режиме перегрузки, а также при проведении испытаний двигателей с большой величиной скольжения, что приводит к изменению величины скольжения во время замера скольжения, что в свою очередь приводит к ошибкам в измерении скольжения. Недостатками является также то, что при большой величине скольжения возникают трудности при отсчете оборотов зачерненного диска, что также влияет на точность результата.
Задачей, решаемой изобретением, является повышение помехоустойчивости, точности измерения, сокращение времени для осуществления измерения и возможность автоматизации процесса испытания АД.
Решение поставленной задачи достигается тем, что в качестве информационного сигнала используют сигнал постоянного напряжения, который масштабируют, инвертируют, после чего суммируют с сигналом опорного напряжения, значение которого определяют при синхронном вращении, полученную сумму усиливают до величины, пригодной для измерения, измеряют и по измеренной величине определяют скольжение асинхронного двигателя.
По сравнению с наиболее близким аналогом заявленное решение имеет отличительные черты:
- использование в качестве информационного - сигнала постоянного напряжения;
- использование в качестве опорного - сигнала постоянного напряжения, определяемого при синхронном вращении вала испытуемого АД;
- применение преобразователя постоянного напряжения с эффектом Холла;
- применение операции аналогового суммирования.
При использовании предлагаемого способа повышается помехоустойчивость, что обусловлено использованием в качестве информационного сигнала сигнала постоянного напряжения, уменьшается время, необходимое для осуществления измерения скольжения, за счет использования сумматора аналоговых сигналов.
Примером реализации предложенного способа является устройство, блок-схема которого поясняется чертежом, на котором изображено устройство для измерения скольжения, содержащее датчик скорости 1, преобразователь постоянного напряжения с эффектом Холла 2, инвертирующий усилитель 3, аналоговый сумматор 4, усилитель выходного сигнала 5.
Способ измерения скольжения АД заключается в следующих действиях: датчиком скорости 1 преобразуют частоту вращения вала n АД в напряжение UТГ, сигнал UТГ масштабируют преобразователем постоянного напряжения 2. С выхода преобразователя сигнал UДНХ подают на инвертирующий усилитель 3, затем на первый вход сумматора 4. На второй вход сумматора 4 подают опорное напряжение Uопор, величину которого определяют при синхронном вращении вала АД так, чтобы выходное напряжение сумматора U1 стремилось к нулю справа. Выходное напряжение сумматора поступает на вход выходного усилителя 5, которое затем измеряют с помощью вольтметра постоянного тока.
Величину скольжения определяют по формуле

где k2 - коэффициент усиления выходного усилителя,
U2 - напряжение, измеряемое вольтметром постоянного тока.
При этом величина опорного напряжения Uопор устанавливается при
синхронном вращении испытуемой машины так, чтобы выполнялось условие

и при проведении испытаний АД подается на второй вход сумматора аналоговых сигналов.
Величина коэффициента усиления выходного усилителя выбирается таким образом, чтобы напряжение U2 находилось в пределах от 35 до 95% шкалы прибора, измеряющего U2, или от 35 до 95% максимального напряжения, измеряемого аналого-цифровым преобразователем, выполняющим функции вольтметра.
Помехоустойчивость достигается за счет использования в качестве информационного сигнала сигнала постоянного напряжения. Точность измерения достигается за счет осуществления операции над информационным сигналом на аналоговом уровне, обусловлена погрешностью измерения U2, точностью задания опорного напряжения Uопор и определяется формулой

Использование предлагаемого способа для промышленных испытаний АД позволяет автоматизировать процесс испытаний, повысить помехоустойчивость и точность измерения величины скольжения.
Способ измерения скольжения асинхронных двигателей, отличающийся тем, что в качестве информационного сигнала используют сигнал постоянного напряжения, поступающий с датчика скорости, преобразующего скорость вращения вала асинхронного двигателя в постоянное напряжение, который масштабируют преобразователем постоянного напряжения с эффектом Холла, инвертируют, подавая сигнал на инвертирующий вход сумматора, после чего суммируют с сигналом опорного напряжения UОПОР, значение которого определяют при синхронном вращении вала испытуемого асинхронного двигателя так, чтобы выходное напряжение сумматора стремилось к нулю справа, и подают на неинвертирующий вход сумматора, выходное напряжение которого подают на вход выходного усилителя, затем измеряют с помощью вольтметра постоянного тока и определяют скольжение s асинхронного двигателя по формуле s=[U 2/(к2 ·UОПОР )]100%, где к2 - коэффициент усиления выходного усилителя, U2 - напряжение, измеряемое вольтметром постоянного тока.
www.freepatent.ru
Cтраница 1
Измерение скольжения удобно проводить стробоскопическим методом. Для этого на торце вала электродвигателя укрепляется соответствующий диск ( рис. 190), освещаемый лампой накаливания мощностью 15 - 25 Вт, а еще лучше неоновой, которая питается переменным током той же частоты, что и обмотки статора, и подсчитывается кажущееся число оборотов диска Ля за время Д, выраженное в секундах. [2]
Измерение скольжения в этом поле производят при помощи прибора, представляющего собой катушку, состоящую обычно из 2000 - 3000 витков, намотанных проводником небольшого сечения ( диаметром порядка 0 3 - 0 5 мм), внутри которой помещают сердечник из листовой стали; концы катушки выводят на магнитоэлектрический гальванометр с нулем посередине. [3]
Измерение скольжения удобно проводить стробоскопическим методом. Для этого на торце вала электродвигателя укрепляется соответствующий диск ( рис. 190), освещаемый лампой накаливания мощностью 15 - 25 Вт, а еще лучше неоновой, которая питается переменным током той же частоты, что и обмотки статора, и подсчитывается кажущееся число оборотов диска Дп за время ДЛ выраженное в секундах. [5]
Для измерения скольжения наиболее употребительным является способ неоновой лампы с использованием стробоскопического эффекта. Помимо лампы необходимо иметь секундомер. [7]
При измерении скольжения катушку помещают на ближайшем расстоянии от конца вала так, чтобы влияние поля рассеяния ротора было выражено достаточно заметно. Под действием наведенного в катушке тока, имеющего частоту скольжения f, стрелка гальванометра начинает колебаться в обе стороны от нуля, при чем одному периоду тока в роторе соответствует одно полное колебание стрелки гальванометра. [8]
Большинство применяемых методов измерения скольжения требуют известного времени на производство отсчетов; понятно, что в течение этого времени режим двигателя должен оставаться совершенно неизменным. [9]
В чем заключается сущность методов измерения скольжения асинхронных машин. [10]
В соответствии с ГОСТ 7217 - 87 для измерения скольжения применяются методы амперметра постоянного тока, индуктивной катушки и стробоскопический. [11]
Таким образом, задача нахождения коэффициента нагрузки и мощности на валу Р может быть сведена к измерению скольжения двигателя. [13]
Ширина метки равна ширине полосы, а длина в направлении окружности выбирается так, чтобы расстояния между соседними метками было в 3 - 4 раза больше длины метки. Само измерение скольжения производится следующим образом: осветив диск или ленту с метками неоновой лампой, нужно следить за кажущимся прохождением меток мимо какого-нибудь определенного места. В момент прохождения метки, с которого начинается измерение, пускается в ход секундомер. [14]
Этот способ одинаково пригоден для измерения скольжения асинхронных двигателей всех типов и основан на том, что вследствие некоторой несимметрии ротора, часть его магнитного потока рассеяния, обычно вчень небольшая, замыкается по воздуху через вал, подшипники и станину. [15]
Страницы: 1 2
www.ngpedia.ru
Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины скольжения ротора электродвигателя.
Известен способ определения скольжения ротора асинхронного электродвигателя (Патент РФ №2397505, MПK7 G01R 31/34, 2010 г.), включающий измерение токов статора всех фаз, определение результирующего тока статора, проведение дискретного преобразование Фурье модуля результирующего вектора тока статора и одного из токов статора. Скольжение определяют по полученным значениям основной частотной составляющей fs0 модуля результирующего вектора тока статора в диапазоне частот от 0 до 50 Гц и основной частотной составляющей одного из токов статора с наибольшей амплитудой fc.
Известен способ определения скольжения ротора асинхронного электродвигателя и устройство для его осуществления (Патент РФ №2209442, МПК7 G01R 31/34, 2003 г.), включающий регистрацию мгновенного значения потребляемого тока, его оцифровывание и преобразование Гильберта, определение интегральной амплитуды тока, коэффициента амплитудной модуляции и частоты скольжения ротора.
Недостатками этих способов являются необходимость доступа к цепям питания двигателя и отсутствие информации о достоверности полученных результатов.
В качестве прототипа принят «Способ определения скольжения ротора асинхронного электродвигателя по току статора» (патент на изобретение Российской Федерации №2559162, МПК G01R 31/34, 2015 г.), включающий цифровую регистрацию мгновенной величины амплитуды потребляемого тока, являющегося диагностическим сигналом, во времени на одной из фаз кабеля питания асинхронного электродвигателя, получение с помощью быстрого преобразования Фурье амплитудного спектра зарегистрированного сигнала, определение максимума амплитудного спектра и соответствующую ему частоту, которая близка по значению к частоте сети, определение с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения точного значения частоты сети, вычисление по полученному значению частоты сети и числу пар полюсов электродвигателя границы одного диапазона частот для двигателей с одной парой полюсов, либо двух диапазонов для двигателей с числом пар полюсов большим одного на амплитудном спектре, определение на каждом из полученных диапазонов максимума амплитудных спектров и соответствующих им частот, которые близки по значению к частотам гармоник от эксцентриситета ротора (ГЭР) первого порядка, определение с помощью метода автокоррекции времени записи сигнала (АВЗС) путем его последовательного уменьшения точных значений частот гармоник от эксцентриситета ротора первого порядка, по которым получают для двигателей с одной парой полюсов одно значение скольжения, которое является для данных двигателей конечным результатом, а для двигателей с двумя и более парами полюсов два значения скольжения ротора, вычисление скольжения ротора такового асинхронного электродвигателя по среднему арифметическому данных значений.
Недостатками этого способа являются низкая помехозащищенность информативного сигнала из-за низкого соотношения сигнал/шум в исследуемых частотных диапазонах, т.к. обмотка статора является своего рода фильтром для указанных частот, значительно снижает их амплитуды, что затрудняет их обнаружение. А также вероятность возможности получения недостоверных данных из-за отсутствия критерия достоверного получения информации о значении расчетного скольжения.
Техническим результатом предлагаемого изобретения являются повышение помехозащищенности информативного сигнала, так как во внешнем магнитном поле ГЭР более выражены на фоне шума в исследуемых частотных диапазонах, чем в токе статора. А также повышение достоверности полученного значения скольжения для двигателей с числом полюсов более одного за счет наличия критерия достоверного получения информации в разработанном способе.
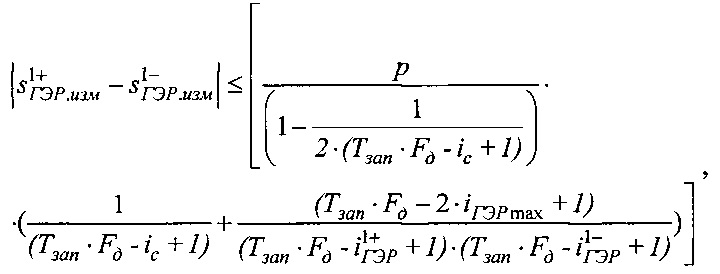
Технический результат достигается тем, что в способе определения скольжения ротора асинхронного электродвигателя производится оценка величины скольжения ротора путем цифровой регистрации мгновенной величины диагностического сигнала, определение с помощью быстрого преобразования Фурье амплитудного спектра зарегистрированного сигнала, определения максимума амплитудного спектра и соответствующую ему частоту, которая близка по значению к частоте сети, определение точного значения частоты сети с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения, по полученному значению частоты сети и числу пар полюсов электродвигателя вычисление границы одного диапазона частот для двигателей с одной парой полюсов, либо двух диапазонов для двигателей с числом пар полюсов большим одного на амплитудном спектре, определение на каждом из полученных диапазонов максимумов амплитудных спектров и соответствующих им частот, которые близки по значениям к частотам гармоник эксцентриситета ротора первого порядка, определение с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения точных значений частот гармоник эксцентриситета ротора первого порядка, по которым для двигателей с одной парой полюсов получается одно значение скольжения, которое является для данных двигателей конечным результатом, а для двигателей с двумя и более парами полюсов два значения скольжения ротора, скольжение ротора такого асинхронного электродвигателя определяется по среднему арифметическому данных значений, в качестве диагностического сигнала принимается радиальную составляющую напряженности внешнего магнитного поля, регистрацию которой осуществляют датчиком магнитного поля, устанавливаемым на корпусе электродвигателя в зоне середины длины сердечника статора, а для двигателей с числом пар полюсов, более одного, проводится проверка достоверности определения скольжения по выражению:

где  - значение скольжения, рассчитанное по меньшей из двух частот гармоник от эксцентриситета ротора первого порядка;
- значение скольжения, рассчитанное по меньшей из двух частот гармоник от эксцентриситета ротора первого порядка;
 - значение скольжения, рассчитанное по большей из двух частот гармоник от эксцентриситета ротора первого порядка;
- значение скольжения, рассчитанное по большей из двух частот гармоник от эксцентриситета ротора первого порядка;
р - число пар полюсов;
Тзап - время записи сигнала;
 - частота дискретизации;
- частота дискретизации;
ic - количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении частоты сети;
 - количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении большей из двух частот ГЭР 1-го порядка
- количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении большей из двух частот ГЭР 1-го порядка  ;
;
 - количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении меньшей из двух частот ГЭР 1-го порядка
- количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении меньшей из двух частот ГЭР 1-го порядка  ;
;
iГЭРmax принимают равным  , если
, если  ,
,
или принимают равным  , если
, если  .
.
Перечень графических иллюстраций:
Фиг. 1. Амплитудный спектр внешнего магнитного поля для низковольтного асинхронного двигателя 4AM100S4CY1;
Фиг. 2. Амплитудный спектр внешнего магнитного поля для высоковольтного асинхронного двигателя ДАМСО-15-12-8;
Фиг. 3. Амплитудный спектр тока статора для высоковольтного асинхронного двигателя ДАМСО-15-12-8.
Сущность способа заключается в следующем.
Известно, что магнитное поле в воздушном зазоре асинхронного двигателя изменяется не строго по синусоидальному закону. Поэтому ток статора и внешнее магнитное поле также будут изменяться по несинусоидальному закону. Таким образом, при разложении в ряд Фурье сигнала тока или внешнего магнитного поля в нем обнаруживаются гармоники, имеющие частоту, отличную от частоты питающей сети. Следует отметить, что амплитуды этих гармоник относительно амплитуды основной гармоники для внешнего магнитного поля существенно превышают амплитуды соответствующих гармоник для тока статора, как это видно при сравнении фиг. 2 и фиг. 3.
В предлагаемом способе определение скольжения асинхронного электродвигателя осуществляют путем регистрации мгновенной величины радиальной составляющей напряженности внешнего магнитного поля во времени посредством датчика магнитного поля (например, датчика Холла), который устанавливают на корпусе в зоне середины длины сердечника статора для компенсации аксиальной составляющей магнитного поля.
Зарегистрированный сигнал кроме основной гармоники также содержит ГЭР первого порядка, частоты которых зависят от параметров двигателя и могут быть определены по следующему выражению:

где  - плюсовая и минусовая частоты ГЭР первого порядка соответственно.
- плюсовая и минусовая частоты ГЭР первого порядка соответственно.
Выражения для определения скольжения электродвигателя приведены в описании к патенту на изобретение Российской Федерации №2559162.
Для проверки достоверности полученных результатов для двигателей с числом пар полюсов не менее двух на основании методической погрешности было выведено следующее условие определения достоверности полученного результата:
Абсолютные погрешности определения частоты сети и максимальной частоты первой гармоники динамического эксцентриситета с применением метода АВЗС определяются по формулам

где - частота дискретизации;
 - точное значение частот ГЭР 1-го порядка;
- точное значение частот ГЭР 1-го порядка;
 - точное значение частоты сети.
- точное значение частоты сети.
Для определения максимальной погрешности необходимо рассмотреть все варианты сочетания знаков в выражениях для расчета значений скольжения по гармоникам эксцентриситета ротора первого порядка  и
и  . Получив значения погрешности определения скольжения по гармоникам эксцентриситета ротора по ГЭР первого порядка, определяют максимально возможную погрешность как сумму значений
. Получив значения погрешности определения скольжения по гармоникам эксцентриситета ротора по ГЭР первого порядка, определяют максимально возможную погрешность как сумму значений  и
и  . Далее из выражения максимальной погрешности удаляют точные значений частот динамического эксцентриситета ротора и сети. После математических преобразований было получено следующее выражение для оценки достоверности результатов расчета скольжения по гармоникам эксцентриситета ротора:
. Далее из выражения максимальной погрешности удаляют точные значений частот динамического эксцентриситета ротора и сети. После математических преобразований было получено следующее выражение для оценки достоверности результатов расчета скольжения по гармоникам эксцентриситета ротора:

Таким образом, заявленный способ позволяет определять значение скольжения по ГЭР первого порядка, присутствующими во внешнем магнитном поле, и производить проверку правильного определения скольжения для двигателей с числом полюсов два и более.
Способ реализуется следующим образом:
- посредством внешнего датчика магнитного поля (например, датчика Холла), установленного на корпусе электродвигателя в зоне середины длины сердечника статора, осуществляют запись сигнала радиальной составляющей напряженности внешнего магнитного поля.
- сигнал оцифровывают, затем формируют вектор амплитудного спектра, по максимуму амплитуды радиальной составляющей напряженности внешнего магнитного поля определяют частоту сети;
- формируют диапазоны частот гармоник эксцентриситета ротора, границы которых определяются при значениях скольжений s=0 и s=1,5sном, где sном - номинальное скольжение электродвигателя, 1,5sном - максимальное значение скольжения с учетом перегрузки и допустимого отклонения скольжения от номинального при номинальной нагрузке машины.
Первый диапазон:
 , где
, где  - частота, соответствующая верхней границе первого диапазона;
- частота, соответствующая верхней границе первого диапазона;
 , где
, где  - частота, соответствующая нижней границе первого диапазона.
- частота, соответствующая нижней границе первого диапазона.
Второй диапазон:
 , где
, где  - частота, соответствующая верхней границе второго диапазона;
- частота, соответствующая верхней границе второго диапазона;
 , где
, где  - частота, соответствующая нижней границе второго диапазона;
- частота, соответствующая нижней границе второго диапазона;
- в данных диапазонах находят частоты, обусловленные ГЭР первого порядка, имеющие наибольшую амплитуду. Если двигатель имеет две и более пары полюсов, то в гармонике от эксцентриситета ротора первого порядка будут присутствовать две частоты, если одну пару, то будет присутствовать только одна частота.
Для двигателей с двумя и более парами полюсов по двум частотам ГЭР первого порядка осуществляют расчет величины скольжения ротора асинхронного электродвигателя с последующим осреднением результата.
Полученные значения скольжения проверяются по критерию (3) для проверки достоверности определения скольжения. Если данные критерии выполняются, полученный результат можно считать правильным, иначе требуется провести дополнительные измерения.
Для двигателей с одной парой полюсов расчетное значение скольжения определяют по одной частоте ГЭР первого порядка. Проверка достоверности полученного значения скольжения не производится.
Способ определения величины скольжения ротора асинхронного электродвигателя был реализован на базе персонального компьютера и опробован на двух асинхронных электродвигателях электрической станции (высоковольтном и низковольтном). Паспортные данные двигателей приведены в табл.1.
Пример 1. Определение скольжения ротора асинхронного электродвигателя на низковольтном асинхронном двигателе 4AM100S4CY1.
Запись сигнала осуществлялась с помощью датчика магнитного поля, расположенного на корпусе электродвигателя в зоне середины длины сердечника статора. Сигнал оцифровывается с помощью аналого-цифрового преобразователя (АЦП). Частота вращения вала ротора электродвигателя определялась с помощью оптического тахометра АТ-8. Погрешность его измерений составляет 0,05%. Частота дискретизации АЦП 10 кГц. Продолжительность времени записи сигнала составляла 10 с.
В ходе исследования на низковольтном двигателе было проведено определение скольжения двумя способами:
1. В первом способе (эталонном способе) определялось значение скольжения, принимаемое за точное (эталонное). С помощью оптического тахометра определялось значение частоты вращения ротора, а с помощью частотометра - значение частоты питающей сети.
2. Второй способ {заявленный способ) позволяет определить скольжение по значению ГЭР первого порядка, которое рассчитывается по выражению (1), и частоты питающей сети, присутствующими во внешнем магнитном поле. Это разрабатываемый способ. Так как двигатель имеет две пары полюсов, то в этом случае производится проверка достоверности результатов измерения по критерию (3).
Результаты испытаний приведены в табл. 2. Спектр радиальной составляющей напряженности внешнего магнитного поля этого двигателя приведен на фиг. 1. Видно, что результаты расчета разработанным способом с высокой точностью совпали с результатами, полученными эталонным способом. Кроме того, критерии подтвердили правильность полученного результата. Таким образом, полученные результаты подтвердили эффективность данного способа для определения скольжения низковольтных асинхронных двигателей.
Примечание: разница между значениями скольжения, определенного заявленным способом (табл. 2, строка №5), и скольжения, определенного с помощью тахометра и частоты сети (табл. 2, строка №6), вызвана погрешностью тахометра, так как сравнение величин, указанных в строках №3 и №4 табл. 2, доказывает высокую достоверность определения скольжения заявленным способом.
Пример 2. Определение скольжения ротора асинхронного электродвигателя на высоковольтном асинхронном двигателе ДАМСО-15-12-8.
В отличие от вышеописанного случая, на высоковольтном двигателе скорость вращения вала с помощью тахометра не определялась. Поэтому достоверность полученных данных была определена по критерию 3. Результаты испытаний приведены в табл. 3. Критерии подтвердили правильность полученного результата. Также достоверность определения скольжения подтверждает то, что результаты расчета, полученные для того же двигателя при измерении скольжения по току статора, близки с результатами расчета предложенным способом. Амплитудные спектры внешнего магнитного поля этого двигателя приведены на фиг. 2, а тока статора этого же двигателя - на фиг. 3. Сравнивая амплитудные спектры тока статора и внешнего магнитного поля можно отметить, что на рассматриваемых диапазонах частот, где определялись частоты ГЭР первого порядка, соотношение амплитуды минимальной из ГЭР и шума для внешнего магнитного поля составляет приблизительно 50, а для тока статора - около 10. Это подтверждает то, что ГЭР лучше проявляются при анализе внешнего поля, чем тока статора, что является важным преимуществом предложенного способа.
Таким образом, полученные результаты подтвердили эффективность данного способа для определения скольжения высоковольтных асинхронных двигателей.








edrid.ru
Класс 21dÐ, 19;
21е, 22
МП) ИНМ 33153TLFih4T35 Ы ИЗОУПБИ
ОПИСАНИЕ устройства для измерения скольжения в асинхронных двигателях.
К авторскому свидетельству E. В. Миллера, заявленному
14 апреля 1932 года (спр. о перв. № 107382).
О выдаче авторского свидетельства опубликоваыо 31 марта 1933 года.
Как известно, скольжение асинхронного двигателя определяется формулой где
5% — скольжение в процентах. и, †чис оборотов поля статора, n„ — число оборотов ротора.
Большинство способов экспериментального определения скольжения основано на измерении величины и, и подсчета So при известном и обычно постоянном п1 (f сети = const). Таковы способы определения скольжения по тахометру, стробоскопическим методом и при помощи электрического генератора. Так как скольжение двигателя обычно невелико (1+5%), то при указанных методах определения скольжения погрешность в измерении ла на 0,5 — 2% повлечетошибку в SN на 50 — 40%, что совершенно исказит результаты опыта.
Скольжение можно определять, включив амперметр постоянного тока в фазу ротора (если ротор с кольцами) и считая число колебаний стрелки амперметра в определенный промежуток времени. Вместо амперметра можно приключать чув259 ючвааъ я аа цй аия ююдюаФ а@и аы аа.>хююке,мвжимт.n" ствительный милливольтметр к концам вала двигателя. Токи Фуко, возникающие в железе ротора, с частотой, пропорциональной скольжению, будут колебать стрелку милливольтметра. Последние способы дают не мгновенное значение скольжения, а среднее за время опыта; кроме того, при большом скольжении колебания стрелки настолько быстры, что считать их довольно затруднительно.
Другие способы определения скольжения обладают подобными же недостатками или их совокупностью.
Предлагаемое изобретение, относящееся к типу способов для измерения скольжения с применением электрического генератора, вращаемого от вала испытуемого двигателя, имеет целью устранить указанные недостатки и дать способ, позволяющий непосредственно измерять скольжение по вольтметру, соответственным образом отградуированному.
Предлагается применить в качестве генератора коллекторную машину, статор которой питается от сети используемого двигателя, а щетки приключены на вольтметр переменного тока. Ротор этой машины жестко сцеплен с валом аСинхронного двигателя. Если ротор и динамо-тахометр будут вращаться в одну сторону, чего легко достигнуть соответствующим включением фаз статора прибора, то в витках будет индуктироваться э.д.с., пропорциональная разности оборотов поля и ротора (4n =-n — и..),— т.-е. скольжению.
F. " . Ф вЂ .10 вольт, PÄhn N — 8 где:
F э,д.с. ротора, P — число пар полюсов статора, hn — относительная скорость ротора, Ф вЂ” полезный поток через виток ротора, N — число проводников на окружности ротора, а †чис пар параллельных ветвей обмотки ротора.
Если бы щетки были неподвижны относительно полюсов (в действительности вращались бы с синхронной скоростью), то они и снимали бы эту э.д.с. (Е„,) постоянного тока. Но так как щетки относительно поля вращаются с синхронною скоростью п„то э.д.с. на них будет переменная с амплитудой Е„,. Присоединив к щеткам вольтметр переменного тока и проградуировав его в S%, можно непосредственно определить скольжение.
Чтобы устройство подходило для измерения скольжения двигателя с любым числом полюсов, его следует снабдить коробкой скорости и соответствующими передаточными числами.
Предмет .из о бр етени я.
1. Устройство для измерения скольжения в асинхронных двигателях с применением электрического генератора, вращаемого от вала испытуемого двигателя, отлйчающееся тем, что в качестве указанного генератора с целью получения электродвижущей силы, по амплитуде пропорциональной скольжению, а по частоте числу оборотов двигателя, применена коллекторная машина, статор которой питается от сети испытуемого двигателя, а щетки приключены на вольтметр переменного тока, проградуированный по скольжению двигателя.
2. При устройстве по п. 1 применение коробки скоростей для связи вала асинхронного двигателя с коллекторной машиной, с целью приведения в соответствие числа полюсов последней с числом полюсов испытуемого двигателя.
Тип. «Искра».


www.findpatent.ru
Изобретение относится к электротехнике, преимущественно к электрическим машинам и измерительной технике, предназначено для определения скольжения асинхронного двигателя с фазным ротором. Задачей изобретения является расширение арсенала средств аналогичного назначения. Осуществляют цифровую регистрацию мгновенной величины потребляемого им тока на одной из фаз питания асинхронного двигателя с фазным ротором, в установившемся режиме функционирования асинхронного двигателя одновременно проводят цифровую регистрацию мгновенных величин потребляемого тока на одной из фаз питания и мгновенных величин тока на одной из фаз ротора, производят дискретное преобразование Фурье, получая амплитудно-частотные характеристики сигналов, выделяют основные составляющие с наибольшей амплитудой потребляемого тока с частотой fс и тока ротора с частотой F p, используя которые, определяют скольжение ротора, скольжение ротора определяют по формуле  . 1 з.п. ф-лы, 6 ил., 1 табл.
. 1 з.п. ф-лы, 6 ил., 1 табл. 
Изобретение относится к электротехнике, преимущественно к электрическим машинам и измерительной технике, предназначено для определения скольжения асинхронного двигателя с фазным ротором.
Известен способ определения скольжения ротора асинхронного электродвигателя [Патент РФ 2209442, МПК7 G01R 31/34, опубл. 27.07.2003], выбранный в качестве прототипа, заключающийся в том, что на одной из фаз кабеля питания асинхронного электродвигателя осуществляют цифровую регистрацию мгновенной величины потребляемого им тока во времени, путем преобразования Гильберта выделяют низкочастотную огибающую амплитудно-модулированного сигнала потребляемого тока и определяют: численные значения амплитуды потребляемого асинхронным электродвигателем тока, коэффициент амплитудной модуляции и скольжение ротора.
Недостатком известного способа является то, что он требует большего количество операций для осуществления.
Задачей изобретения является расширение арсенала средств аналогичного назначения.
Это достигается тем, что в способе определения скольжения ротора асинхронного двигателя так же, как в прототипе, осуществляют цифровую регистрацию мгновенной величины потребляемого им тока на одной из фаз питания асинхронного двигателя с фазным ротором.
Согласно изобретению в установившемся режиме функционирования асинхронного двигателя одновременно проводят цифровую регистрацию мгновенных величин потребляемого тока на одной из фаз питания и мгновенных величин тока на одной из фаз ротора, производят дискретное преобразование Фурье, получая амплитудно-частотные характеристики сигналов, выделяют основные составляющие с наибольшей амплитудой потребляемого тока с частотой fc и тока ротора с частотой f p, используя которые, определяют скольжение ротора.
Скольжение ротора определяют по формуле
.
Использование такого подхода уменьшает количество операций для определения скольжения ротора.
На фиг.1 приведена схема устройства, реализующего рассматриваемый способ определения скольжения асинхронного двигателя.
На фиг.2 приведена осциллограмма тока одной из фаз питания асинхронного двигателя.
На фиг.3 приведена осциллограмма тока одной из фаз ротора.
На фиг.4 приведена амплитудно-частотная характеристика тока одной из фаз питания асинхронного двигателя.
На фиг.5 приведена амплитудно-частотная характеристика тока одной из фаз ротора.
На фиг.6 приведена осциллограмма выходного сигнала датчика частоты вращения.
В табл.1 приведены наибольшие амплитуды и соответствующие им частоты амплитудно-частотных характеристик сигналов.
Заявленный способ может быть осуществлен с помощью устройства (фиг.1), содержащего первый датчик сигнала 1 (ДС1), подключенный к одной из фаз питания асинхронного двигателя. К первому датчику сигнала 1 (ДС1) последовательно подключены первый программатор дискретного преобразования Фурье 2 (ПДПФ1), первый программатор выделения основной частоты 3 (ПОЧ1) и программатор определения скольжения 4 (ПС), который связан с дисплеем или ЭВМ (не показано на фиг.1). Второй датчик сигнала 5 (ДС2) подключен к одной из фаз ротора асинхронного двигателя. Ко второму датчику сигнала 5 (ДС2) последовательно подключены второй программатор дискретного преобразования Фурье 6 (ПДПФ2), второй программатор выделения основной частоты 7 (ПОЧ2) и программатор определения скольжения 4 (ПС).
В качестве датчиков сигнала 1 (ДС1) и 5 (ДС2) могут быть использованы датчики тока - промышленный прибор КЭИ-0,1. Программаторы дискретного преобразования Фурье 2 (ПДПФ1) и 6 (ПДПФ2), программаторы выделения основной частоты 3 (ПОЧ1) и 7 (ПОЧ2), программатор определения скольжения 3 (ПС) могут быть выполнены на микроконтроллере серии 51 производителя amtel AT89S53.
Для проверки работоспособности предложенного способа определения скольжения первый датчик сигнала 1 (ДС1) подключили к одной из фаз питания универсального асинхронного двигателя с фазным ротором (2p=4, nc=1500 об/мин), второй датчик сигнала 5 (ДС2) подключили к одной из фаз ротора асинхронного двигателя с фазным ротором. Регистрационные записи мгновенных значений величины потребляемого асинхронным двигателем тока ic и величины тока ротора ip получили в установившемся режиме функционирования асинхронного двигателя в течение 1 с (фиг.2 и фиг.3). В программаторах дискретного преобразования Фурье 2 (ПДПФ1) и 6 (ПДПФ2) получали амплитудно-частотные характеристики сигналов. Зависимость амплитуды тока одной из фаз питания A ic, A, от частоты fc, Гц, приведена на фиг.4. Зависимость амплитуды тока одной из фаз ротора Aiр , A, от частоты fp, Гц, приведена на фиг.5. В табл.1 представлены наибольшие амплитуды токов и соответствующие им частоты.

Далее в программаторах выделения основной частоты 3 (ПОЧ1) и 7 (ПОЧ2) выделили основные составляющие с наибольшей амплитудой потребляемого тока с частотой fc =50 Гц и тока ротора с частотой fp=20 Гц. Выделенные частоты fc и fp передали в программатор определения скольжения 4 (ПС), где определили скольжение ротора s

Частоту вращения ротора определили по формуле
np=(1-s)·nc=(1-0,4)·1500=900 об/мин.
Для проверки правильности определения частоты вращения на валу асинхронного двигателя с фазным ротором расположили фотоэлектрический датчик частоты вращения ЛИР-51 (фиг.6). Среднее значение частоты вращения ротора с датчика частоты вращения np=883.31749 об/мин.
Таким образом, хорошо совпадают результаты расчета с экспериментальными данными.
1. Способ определения скольжения асинхронного двигателя с фазным ротором, включающий цифровую регистрацию мгновенной величины потребляемого им тока на одной из фаз питания асинхронного двигателя с фазным ротором, отличающийся тем, что в установившемся режиме функционирования асинхронного двигателя одновременно проводят цифровую регистрацию мгновенных величин потребляемого тока на одной из фаз питания и мгновенных величин тока на одной из фаз ротора, проводят дискретное преобразование Фурье, получая амплитудно-частотные характеристики сигналов, выделяют основные составляющие с наибольшей амплитудой потребляемого тока с частотой fc и тока ротора с частотой fp, используя которые определяют скольжение ротора.
2. Способ по п.1, отличающийся тем, что скольжение ротора определяют по формуле .
www.freepatent.ru






