|
Рассмотренный графический метод расчета рабочих характеристик асинхронных двигателей с применением круговой диаграммы имеет существенный недостаток — необходимость построения этой диаграммы и неизбежную неточность как при построении, так и при ее последующем использовании, связанные с дополнительными построениями, измерениями отрезков и т. п. Аналитический метод расчета рабочих характеристик не предусматривает каких-либо графических изображений и измерений, а некоторое увеличение объема математических вычислений при условии применения простейшей вычислительной техники не вызывает каких-либо затруднений. Аналитический метод расчета основан на схеме замещения асинхронного двигателя (рис. 12.2, б). Исходными при этом являются паспортные данные двигателя (Рном, U1HOM, n2ном) и результаты выполнения опытов холостого хода и короткого замыкания (см. § 14.2 и 14.3). Расчет ведут в следующем порядке. Определяют приведенное активное сопротивление ротора (Ом): r2' = rк – r1, (14.30) а затем критическое скольжение: sкр ≈ r2'/ xк (14.31) и номинальное скольжение: sном = (n1 - n2ном)/n1 (14.32)
Задавшись рядом значений скольжения (всего 6—7 значений, в том числе номинальное shom и критическое sкр), определяют необходимые для построения рабочих характеристик величины. Эквивалентное активное сопротивление (Ом) rэк = r1 +r2'/ s. (14.33) Эквивалентное полное сопротивление рабочего контура схемы замещения (Ом) Zэк = Коэффициент мощности рабочего контура схемы замещения cos φ2 = rэк / zэк. (14.35) Приведенный ток ротора, (А) I/2 = U1 /zэк (14.36) и его активная и реактивная составляющие (А) I/2a = I/2 соs φ2; (14.37) I/2p = I/2 sin φ2. (14.38) Активная и реактивная составляющие тока статора (А) I1а = I0а + I/2а; (14-39) I1p = I0p + I2p (14-40) Здесь I0а = I0 соs φ0 — активная составляющая тока холостого хода; I0p = I0 sin φ0 — реактивная составляющая этого тока. Ток в обмотке статора (А) I1 = Коэффициент мощности двигателя cos φ1 = I1a/ I1 (14.42) Потребляемая двигателем мощность (Вт) P1 = m1U1I1a (14.43) Электрические потери статора Рэ1 определяют по (13.2), электромагнитную мощность Рэм — по (13.6), электромагнитный момент М — по (13.11), электрические потери в роторе Рэ2 — по (13.5), добавочные потери Рдоб — по (13.7) и (13.8). Полезная мощность двигателя (Вт) Р2 = Рэм – Рэ2 – Рмех – Рдоб, (14.44) где Рмех — механические потери, Вт; их определяют из опыта холостого хода (см. рис. 14.2). Коэффициент полезного действия двигателя определяют по (13.10), частоту вращения ротора — по (10.2). Полезный момент (момент на валу) двигателя (Н М2 = 9,55Р2/ n2. (14.45) Результаты расчета сводят в таблицу (см. табл. 14.1), а затем строят рабочие характеристики двигателя (см. рис. 13.7). Пример 14.1.Трехфазный асинхронный двигатель имеет паспортные данные: Рном =3,0 кВт, Uном = 220/380 В, I1ном = 6,3 А, nном = 1430 об/мин. Активное сопротивление фазы обмотки статора при рабочей температуре r1 = 1,70 Ом. Характеристики х.х. двигателя приведены на рис. 14.2 (I0ном = 1,83 А, Рном= 300 Вт, Р/0ном= 283 Вт, Рмех = 200 Вт, соs φ0ном = 0,24, обмотка статора соединена звездой). Характеристики к.з. приведены на рис. 14.3 (Рк.ном = 418 Вт, Uк.ном = 59,5 В, Iк.ном = 6,3 А, cos φк.ном =0,372). Требуется рассчитать данные и построить рабочие характеристики двигателя и определить перегрузочную его способность.
Решение. Активная и реактивная составляющие тока х.х. I0a = I0 cos φ0ном = 1,83 • 0,24 = 0,44 А, I0p = I0 sin φ0ном = 1,83 • 0,97 = 1,77 А. Полное сопротивление кз. по (14.10) zк = Uк.ном/ Iк.ном = 59,5/6,3 = 9,45 Ом, его активная и реактивная составляющие по (14.11) и (14.12) rк = zк соs φк.ном = 9,45 • 0,372 = 3,5 Ом, xк = Приведенное активное сопротивление ротора по (14.30) r/2 = rк – r1 = 3,5 - 1,7 = 1,8 Ом. Критическое скольжение по (14.31) sкр = r/2/ xк = 1,8/ 8,8 = 0,20. Номинальное скольжение по (14.32) sном = (n1 - n2ном)/ n1 = (1500 - 1430)/ 1500 = 0,046. Магнитные потери по (14.8) Рм = Р/0 - Рмех = 283 - 200 = 83 Вт. Задаемся следующими значениями скольжения: 0,01, 0,02, 0,03, 0,046, 0,06 и 0,20. Результаты расчета приведены в табл. 14.1. Рабочие характеристики двигателя представлены на рис. 13.7. Перегрузочная способность двигателя λ = Мmax/ Mном = 38,7/ 21,4 = 1,81. Таблица 14.1
Контрольные вопросы 1.Какие существуют методы получения данных для построения рабочих характеристик асинхронных двигателей? 2.Чем ограничивается применение метода непосредственной нагрузки? 3.Как определить величину механических и магнитных потерь двигателя по характеристикам х.х.?
ГЛАВА 15 • Пуск и регулирование частоты вращения трехфазных асинхронных двигателей Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте: |
zdamsam.ru
Ответ12: Рабочие характеристик асинхронного двигателя это зависимости n, M, сosφ, I1, P1 , КПД-η от полезной мощности на валу Р2. представлены на рис 6-12.
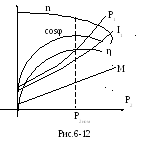
а) Зависимость η=f(P2)
КПД двигателя η= P2/ P1= P2/ ΔР+ P2
P 1 –мощность электрической энергии, поступившая из сети в двигатель,
1 –мощность электрической энергии, поступившая из сети в двигатель,
P2 –мощность, преобразованная в полезную механическую энергию,
P1= ΔР+ P2
ΔР= мощность всех потерь в двигателе: электрических и магнитных потерь в статоре, электрических потерь в роторе и механических потерь ( трение в подшипниках , трение о воздух) .Потери в обмотках изменяются как I2 . Т.о. по мере роста нагрузки ток двигателя растет, а потери растут быстрее. Поэтому в начале по мере роста нагрузки КПД растет быстро, а затем медленно и достигает максимума при 70-75% нагрузки. При дальнейшем увеличении нагрузки Р2 потери значительно возрастают и КПД уменьшается.
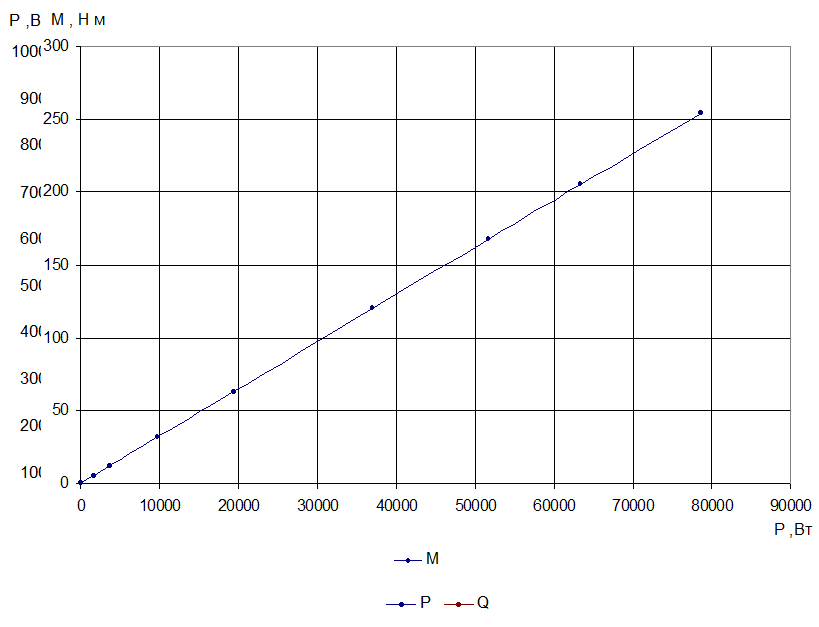
б) Зависимость М=f(P2)
По определению в статическом режиме Мэм=Мнагрузки поэтому М эм= P2/ ω2
где ω2= ω1 ·(1-S) угловая частота вращения ротора.
ω1- угловая частота вращения магнитного поля , S-скольжение.
Поэтому зависимость М=f(P2) линейная.
в) Зависимость сosφ =f(P2)
В АД имеет место два энергетических процесса:
а) Необратимый расход активной энергии Р1 и
б) Обратимый процесс периодического изменения запаса энергии магнитного поля, мерой которой является реактивная мощность Q1,
Соотношение между активной мощностью и реактивной мощностью оценивается коэффициентом мощности двигателя сosφ =Р1/ S, где 
Коэффициент мощности двигателя зависит от нагрузки на его валу. При холостом ходе, энергия расходуется только на покрытие небольших электрических и магнитных потерь в статоре и незначительных механических потерь в подшипниках., Это означает, что активная мощность мала, а реактивная велика., поэтому сosφ мал. Обычно сosφхх =0,08÷0,15. С увеличением нагрузки активная мощность Р1 так же увеличивается , а реактивная Q1 изменяется незначительно. При нагрузке Р2 =Р2ном сosφ достигает максимума сosφmax=0,75÷0,95. При дальнейшем увеличении нагрузки из за увеличения потоков рассевания Q1 растет и сosφ уменьшается.
В виду массового применения АД в производстве, использование их с сosφ < 0,45 нежелательно, такие двигатели надо заменить на более экономичные.
г) Зависимость n2 =f(P2)
Скорость вращения и скольжение связаны зависимостью n2=n1(1-S).
В режиме холостого хода скольжение S~0 и скорость вращения ротора близка к скорости вращения магнитного поля : n2~n1. С увеличением нагрузки ток ротора возрастает и вызывает нагрев его обмотки. На этом участке электрические потери в роторе ΔР2э пропорциональны скольжению:
ΔР2э=s·Р2эм
где Р2эм электромагнитная мощность предаваемая от статора к ротору.
При нагрузке Р2 =Р2ном скольжение так же номинальное sном, =1.5÷7%, при этом n2 = n2ном незначительно отличается от n1 . Можно говорить , что АД имеет жесткую характеристику. При увеличении нагрузки выше номинальной ( область перегрузки ) скорость n2 начинает уменьшаться и при нагрузке выше критической Р2> Р2крит двигатель останавливается .
д) Зависимость S =f(P2)
З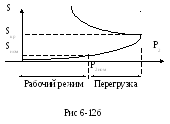 ависимость скольжения S =f(P2) имеет вид (Рис 12б):
ависимость скольжения S =f(P2) имеет вид (Рис 12б):
В режиме холостого хода скольжение
S = 0. С увеличением нагрузки скольжение увеличивается. При нагрузке Р2 =Р2ном скольжение номинальное sном, =1.5÷7%. При дальнейшем увеличении нагрузки P2
(область перегрузки) скольжение быстро возрастает и достигает критического значения Sкр. Дальнейшее увеличение нагрузки приводит к увеличению скольжения и неустойчивому режиму работы двигателя или к его остановке.
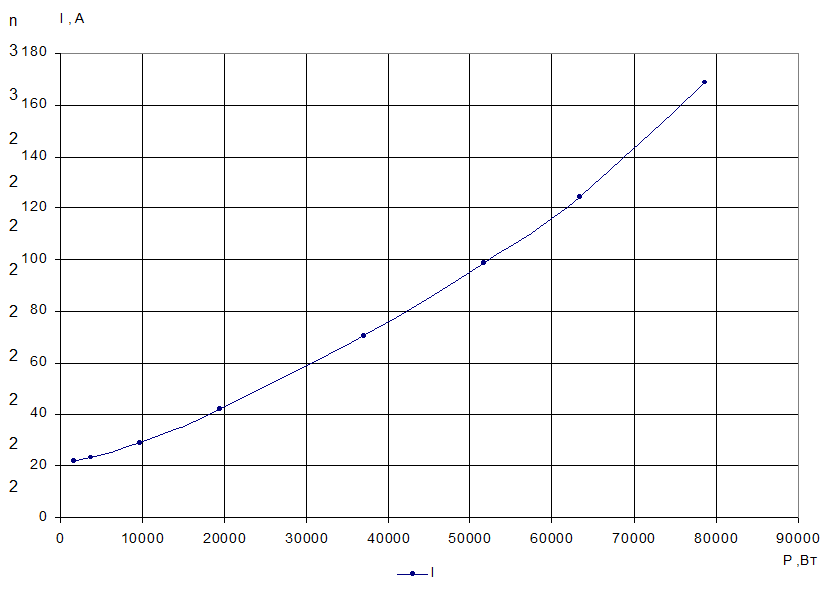
е) Зависимость I1=f(P2)
Зависимость тока статора I1 от нагрузки P2 имеет вид (Рис 12а):
Между током статора I1 и током ротора I2 существует трансформаторная связь
Ток статора согласно уравнению для МДЖС имеет вид: I1=I0 + I2
где I10 ток холостого хода. I10 не зависит от нагрузки ,
I2-тока ротора . I2 так же как и в трансформаторах зависит от нагрузки.
Поэтому зависимость I1 увеличивается с увеличением P2 .
В режиме холостого хода I1=I10. и составляет от 20 до 75% от номинального тока статора I1ном.
В момент пуска ток ротора I2 = I2пуск =(6÷8) I1ном.
studfiles.net
3 Расчет и построение рабочих характеристик
Расчет произведем для характеристик асинхронного двигателя при номинальной нагрузке.
3.1 Эквивалентное сопротивление рабочей ветви схемы, Ом:
Rэк=R1+R2¢/s.
Rэк=0,1+0,0627/0,018=3,583 Ом.
3.2 Эквивалентное полное сопротивление рабочей ветви схемы, Ом:
Zэк= .
.
Zэк= .
.
3.3 Приведенное значение тока ротора, А:
I¢2=Uф.ном/Zэк.
I¢2=220/3,643=60,4 А.
3.4 Активную Р1 и реактивную Q1 мощности, потребляемые из сети, вычисляем по уравнениям баланса мощностей, составленным по Г-образной схеме замещения при неизменном токе I0ном.
Р1= ;
;
Q1= .
.
Р1= ;
;
Q1= .
.
3.5 Ток статора, А:
I1= .
.
I1= .
.
tgj1=Q1/P1=21061/41545=0,5069.
cosj1=0,8919.
3.6 Электромагнитная мощность, Вт:
Рэм=3×R2¢×(I2¢)2/s.
Рэм=3×0,0627×(60,4)2/0,018=38123 Вт=38,123 кВт.
3.7 Вращающий электромагнитный момент, развиваемый двигателем, Н×м:
М= Рэм/W1.
М=38123/314,16=121,35 Н×м.
3.8 Выходная мощность, Вт:
Р2=Рмех-DРмех=Рэм×(1-s)-DРмех.
Р2=38123×(1-0,018)-444=36993 Вт=36,993 кВт.
3.9 КПД двигателя:
h=Р2/Р1.
h=36993/41545=0,8904=89,04%.
3.10 Частота вращения ротора, об/мин:
n2=n1×(1-s).
n2=3000×(1-0,018)=2945 об/мин.
3.11 Момент нагрузки, Н×м:
М2=Р2/Wном.
М2=36993/308,4=119,95 Н×м.
Таблица III Рабочие характеристики асинхронного двигателя мощностью Рном=37 кВт
|
Параметры режима |
Доля от sном |
|||||||
|
0,05 |
0,10 |
0,25 |
0,50 |
1,00 |
1,50 |
2,00 |
3,00 |
|
|
s |
0,001 |
0,002 |
0,005 |
0,009 |
0,018 |
0,027 |
0,036 |
0,054 |
|
Rэк, Ом |
69,767 |
34,933 |
14,033 |
7,067 |
3,583 |
2,422 |
1,842 |
1,261 |
|
I2¢, А |
3,15 |
6,30 |
15,66 |
31,00 |
60,40 |
87,69 |
112,57 |
154,86 |
|
P1, Вт |
4411,2 |
6485,2 |
12654,5 |
22702,8 |
41544,8 |
58202,0 |
72342,8 |
93064,9 |
|
Q1, вар |
13923,3 |
13981,5 |
14384,9 |
15789,2 |
21060,9 |
28989,2 |
38766,2 |
60957,9 |
|
I1, А |
22,129 |
23,352 |
29,029 |
41,899 |
70,573 |
98,518 |
124,356 |
168,563 |
|
tgj1 |
3,1564 |
2,1559 |
1,1367 |
0,6955 |
0,5069 |
0,4981 |
0,5359 |
0,6550 |
|
cosj1 |
0,3020 |
0,4208 |
0,6605 |
0,8210 |
0,8919 |
0,8951 |
0,8814 |
0,8365 |
|
Pэм, Вт |
2078,1 |
4143,1 |
10250,8 |
20084,4 |
38120,3 |
53565,3 |
66211,1 |
83539,9 |
|
M, Н×м |
6,61 |
13,19 |
32,63 |
63,93 |
121,34 |
170,50 |
210,76 |
265,92 |
|
P2, Вт |
1632,2 |
3691,7 |
9760,7 |
19459,6 |
36990,1 |
51675,0 |
63383,5 |
78584,8 |
|
h, % |
37,00 |
56,92 |
77,13 |
85,71 |
89,04 |
88,79 |
87,62 |
84,44 |
|
n2, об/мин |
2997 |
2995 |
2987 |
2973 |
2945 |
2919 |
2892 |
2838 |
|
M2, Н×м |
5,292 |
11,970 |
31,649 |
63,099 |
119,942 |
167,558 |
205,524 |
254,814 |
 |
 |
 |
4 Составление энергетического баланса асинхронного двигателя
Преобразование активной мощности в асинхронном двигателе неизбежно связано с потерями мощности. Различают потери: электрические в обмотке статора (DРэ1) и ротора (DРэ2), магнитные в сердечнике статора (DРм) и механические (DРмех). Магнитными потерями в сердечнике ротора, ввиду их малости, пренебрегают.
Реактивная мощность, потребляемая двигателем, идет на создание магнитных полей рассеяния и основного магнитного поля.
4.1 Уравнение баланса активной мощности
Р1=Р2+SDР=Р2+DРэ1+DРэ2+DРм+DРмех, где DРэ1 – электрические потери в обмотке статора, Вт,
DРэ1=3×(I02+(I¢2)2)×R1;
DРэ2 – электрические потери в обмотке ротора, Вт,
DРэ2=3×(I¢2)2×R¢2;
DРм – магнитные потери в сердечнике статора, Вт,
DРм=3×I02×Rм1.
DРэ1=3×(21,362+60,42)×0,1=1231 Вт.
DРэ2=3×60,42×0,0627=686 Вт.
DРм=3×21,362×1,278=1750 Вт.
Р1=36993+1231+686+1750+444=41104 Вт.
4.2 Уравнение баланса реактивной мощности
vunivere.ru
 (14-34)
(14-34) (14.41)
(14.41) м)
м) =
=  =8,8 Ом.
=8,8 Ом. , A
, A