Содержание
Управление электродвигателем
Автор: admin
31
Авг
Драйвер электродвигателя L6470 dSPIN, благодаря выполнению по аналоговой и смешанной технологиям, представляет собой полностью интегрированное решение для управления 2-фазными шаговыми двигателями с поддержкой микрошагов. Силовая часть драйвера образована двумя полно-мостовыми схемами на основе DMOS-транзисторов с малым RDS(on). Все силовые коммутаторы оснащены схемой точного контроля тока, позволяющие реализовать функции управления током и защиты от перегрузки без потерь мощности.
Цифровой тракт драйвера способен управлять движением без участия внешнего микроконтроллера, а, работая в передовом режиме управления по напряжению, он позволяет добиться превосходных рабочих характеристик, в т.ч. высокая разрешающая способность позиционирования (до 128 микрошагов) и повышенная плавность движения.
Быстродействующий интерфейс SPI поддерживает каскадное включение, что дает возможность одному МК управлять несколькими микросхемами. Наконец, уменьшение резонанса, шума и вибрации при работе на малых скоростях сделают конечную продукцию более простой и более легкой.
Читать далее »
- Комментарии отключены
- Рубрика: STMicroelectronics
Автор: admin
31
Авг
FlexSPIN предназначен для питания и управления многомоторными системами, в т.ч. для одновременного управления шаговым двигателем и двигателем постоянного тока. Он поддерживает уникальное сочетание функций управления и питания, а также ряда дополнительных функций.
Через последовательный интерфейс SPI возможна настройка ряд функциональных узлов, в т.ч. 3 стабилизатора напряжения, 1 высокоточный АЦП, 2 операционных усилителя и 14 конфигурируемых линий ввода-вывода.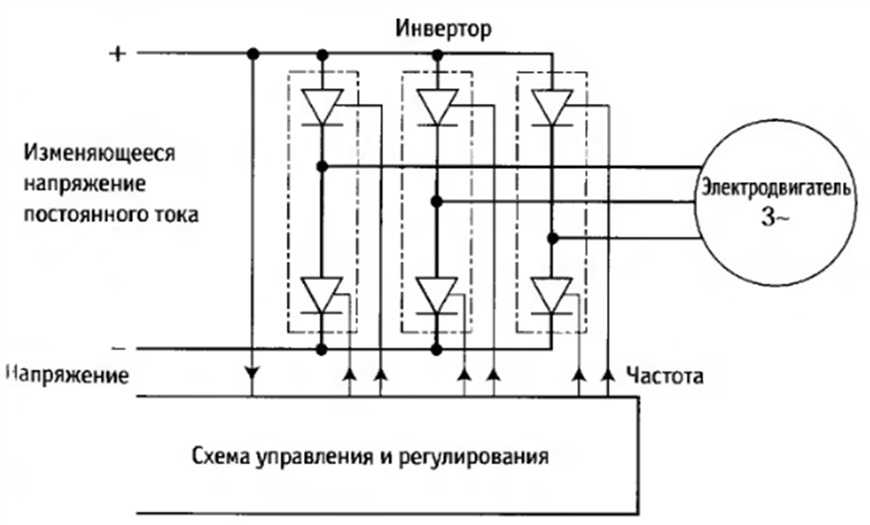
Благодаря возможности одновременного управления шаговым двигателем и двигателем постоянного тока, драйвер FlexSPIN идеален для использования во всех применениях, где используются несколько электродвигателей.
Читать далее »
- Комментарии отключены
- Рубрика: STMicroelectronics
Автор: admin
31
Авг
Плата выполнена на основе микроконтроллера ARM CortexTM-M3 из семейства TMPM370
В состав нового набора BMSKTOPASM370 для векторного управления электродвигателем входят оценочная плата, внутрисхемный эмулятор, 18-вольтовый трехфазный вентильный двигатель, источник питания на напряжение 24В, а также исчерпывающий комплект программных инструментальных средств и документации.
Входящая в набор оценочная плата выполнена на основе высокопроизводительного и маломощного 32-битного микроконтроллера (МК) TMPM370FYFG. Данный МК выполнен на основе ядра ARM Cortex-M3, допускающий тактирование частотой до 80МГц. В его архитектуру входят разработанный компанией Toshiba программируемый драйвер электродвигателя PMD3+, векторный сопроцессор (VE), 12-битный АЦП и обширный набор устройств ввода-вывода и интерфейсов, позволяющих аппаратно реализовать точное векторное управление трехфазным электродвигателем с использованием датчиков положения или без них.
Данный МК выполнен на основе ядра ARM Cortex-M3, допускающий тактирование частотой до 80МГц. В его архитектуру входят разработанный компанией Toshiba программируемый драйвер электродвигателя PMD3+, векторный сопроцессор (VE), 12-битный АЦП и обширный набор устройств ввода-вывода и интерфейсов, позволяющих аппаратно реализовать точное векторное управление трехфазным электродвигателем с использованием датчиков положения или без них.
Читать далее »
- Комментарии отключены
- Рубрика: Toshiba
Автор: admin
27
Апр
В комплект STEVAL-IHM026V1 входят библиотеки программного обеспечения для обслуживания сенсорной клавиатуры (TS, Touch Sensing) и управления бесколлекторным двигателем постоянного тока (BLDC MC, BrushLess Direct Current Motor Control).
Эти средства облегчают разработку приложений с бесколлекторным двигателем постоянного тока, в которых пользовательское управление работой осуществляется через несколько клавиш сенсорной клавиатуры. Другая периферия, не задействованная во встроенном демонстрационном ПО, введена в состав платы STEVAL-IHM026V1 c целью обеспечить гибкость в будущих разработках.
Другая периферия, не задействованная во встроенном демонстрационном ПО, введена в состав платы STEVAL-IHM026V1 c целью обеспечить гибкость в будущих разработках.
Читать далее »
- Комментарии отключены
- Рубрика: STMicroelectronics
Автор: admin
23
Окт
Семейство микроконтроллеров STM8S хорошо зарекомендовало себя в критичных к цене приборах и бытовой технике. Они идеальны для решения задач управления электродвигателем и позволяют добиться лучшего соотношения цена-качество при управлении безколлекторными 3-фазными двигателями, в т.ч. вентильные и асинхронные, с использованием скалярных алгоритмов, которые обеспечивают лучшую эффективность работы двигателя в применениях с умеренными требованиями к динамическим характеристикам
Стартовый набор может использоваться инженерами как в целях оценки возможностей микроконтроллера, так и в целях разработки собственного приложения..jpg) Входящие в комплект набора аппаратное и программное обеспечение демонстрируют, как эффективно использовать STM8S в устройствах управления электродвигателями.
Входящие в комплект набора аппаратное и программное обеспечение демонстрируют, как эффективно использовать STM8S в устройствах управления электродвигателями.
Читать далее »
- Комментарии отключены
- Рубрика: STMicroelectronics
Бесколлекторные двигатели с датчиками Холла (Sensored brushless motors) — Avislab
Мы уже ознакомились с устройством бесколлекторного двигателя и теперь разберемся, как ним управлять.
Мостовая схема ключей
Двигатель имеет три вывода (три фазы) на которые нам придется подавать в разные моменты времени «+» или «-» питания. Это реализуется с помощью электронных ключей, включенных по мостовой схеме:
Замыкая ключ SW1 подаем «+» на фазу А, а замыкая SW6 подаем «-» на фазу С. Таким образом, ток потечет от «+» батареи через фазы А и С. Для обеспечения обратного направления, открываем SW5 и SW2. В этом случае ток потечет от «+» батареи через фазы С и А в обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний ключ и один нижний ключ. При смене состояния нужно сразу выключить пару ключей, выждать время, необходимое для закрытия ключей, и только после этого включить другую пару ключей.
В этом случае ток потечет от «+» батареи через фазы С и А в обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний ключ и один нижний ключ. При смене состояния нужно сразу выключить пару ключей, выждать время, необходимое для закрытия ключей, и только после этого включить другую пару ключей.
Диаграмма включения ключей
Напряжение на обмотки нужно подавать в зависимости от положения двигателя. Рассмотрим управление двигателем, где в качестве датчиков положения используются датчики Холла. Всего используют 3 датчика с дискретными выходами. Ниже приведена схема, согласно которой нужно подавать напряжение на обмотки в зависимости от сигналов с датчиков.
Временная диаграмма:
Таблица включения ключей в зависимости от сигналов датчиков Холла:
Анимированная демонстрация работы 4 полюсного двигателя:
ШИМ (PWM), частота, переходные процессы
При включении ключей, как показано выше, на двигатель подается полное напряжение питания.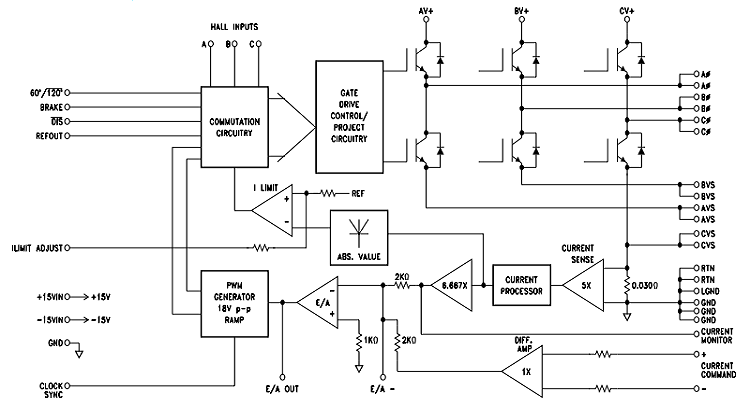 При этом двигатель развивает максимальные обороты (мощность). Чтобы обеспечить управление двигателем нужно регулировать напряжение питания двигателя. Изменение действующего напряжения осуществляется с помощью широтно-импульсной модуляции (ШИМ). Т.е. ключи открыты не все время, а открываются, и закрываются с фиксированной частой, но изменяемой скважностью:
При этом двигатель развивает максимальные обороты (мощность). Чтобы обеспечить управление двигателем нужно регулировать напряжение питания двигателя. Изменение действующего напряжения осуществляется с помощью широтно-импульсной модуляции (ШИМ). Т.е. ключи открыты не все время, а открываются, и закрываются с фиксированной частой, но изменяемой скважностью:
Таким образом, изменяется действующее напряжение от нулевого до напряжения питания. Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ на сигналы, подаваемые на ключи. Это можно реализовать, например, такой схемой:
Некоторые микроконтроллеры могут аппаратно формировать ШИМ сигнал на нескольких своих выводах. Можно формировать ШИМ для каждого из ключей программно. В этом случае схему можно упростить, и не использовать логических элементов. Частота ШИМ сигнала обычно бывает от 4 до 80 килогерц.
Во время включения и выключения ключей происходят переходные процессы, вследствие чего на ключах выделяется дополнительное тепло.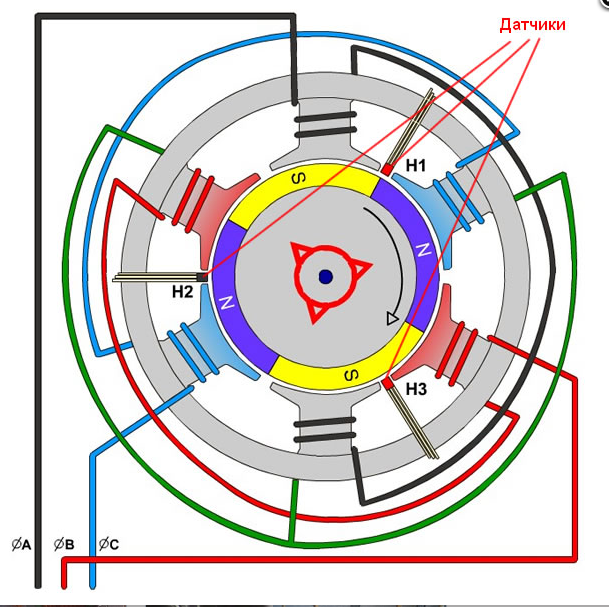 Чем выше частота ШИМ сигнала, тем больше количество переходных процессов за единицу времени, и тем выше потери на ключах. Слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования.
Чем выше частота ШИМ сигнала, тем больше количество переходных процессов за единицу времени, и тем выше потери на ключах. Слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования.
В случае с двигателями без датчиков, которые будут рассматриваться в следующих статьях, выбор частоты ШИМ сигнала играет очень важную роль.
Потери на ключах
Для уменьшения потерь вследствие переходных процессов на ключах ШИМ сигнал можно подавать только на нижние или только на верхние ключи. Прямые потери на ключах (без учета переходных процессов) можно рассчитать по формуле:
P=R*I2
где:
P — теряемая мощность, которая выделяется в виде тепла
R — прямое сопротивление открытого ключа
I — ток, протекаемый через ключ.
Очевидно, что чем меньше сопротивление ключей, тем меньше потери на ключах. Уменьшение сопротивления ключей ведет к повышению общего КПД и уменьшению тепловыделения на ключах.
Уровень потерь на ключах имеет квадратичную зависимость от тока. Уменьшить ток, сохранив при этом общую мощность, можно повысив напряжение питания двигателя. В качестве примера рассмотрим два варианта:
1. Питание: 50В, ток: 100А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 1002 = 10 Вт
2. Питание: 100В, ток: 50А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 502 = 2,5 Вт
Т.е. снизив ток вдвое потери на ключах падают в 4 раза.
Угол опережения фаз (timing)
При приложении напряжения к обмотке двигателя, ток в обмотке не может вырасти мгновенно, поскольку обмотка двигателя представляет собой индуктивность. От момента подачи напряжения до достижения тока максимального значения пройдет некоторое время. Аналогично при снятии напряжения понадобится некоторое время пока ток будет уменьшаться до нуля. Это время зависит от индуктивности обмотки двигателя и других конструктивных особенностей двигателя. Таким образом, действие обмотки двигателя несколько запаздывает за управляющим сигналом.
Таким образом, действие обмотки двигателя несколько запаздывает за управляющим сигналом.
Чтобы компенсировать эту задержку управляющий сигнал на ключи подают с опережением. Опережение управляющего сигнала выражают в угле опережения. Угол опережения может быть от 0 до 30 градусов. Речь идет об электрических градусах (см. Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя). Угол опережения может отличаться для каждой модели двигателя. Точность установки угла опережения сильно влияет на работу высоко-оборотистых двигателей. На малых скоростях точность установки угла опережения не столь критична.
Настройка угла опережения (timing) выполняется либо перемещением датчиков (некоторые двигатели оборудованы специальным приспособлением) либо корректируется программно средствами регулятора. Если двигатель имеет реверсивный режим (должен обеспечивать вращение в обе стороны), разумнее прибегнуть к программному методу.
Для лучшего понимания смысла угла опережения можно провести аналогию с двигателем внутреннего сгорания, где после подачи искры проходит некоторое время до воспламенения топлива. За это время вал двигателя успевает провернуться на некоторый угол. Для компенсации такой задержки устанавливают угол опережения зажигания.
За это время вал двигателя успевает провернуться на некоторый угол. Для компенсации такой задержки устанавливают угол опережения зажигания.
Статті по безколекторним двигунам:
- Бесколлекторный мотор постоянного тока. Что это такое?
- Устройство бесколлекторного мотора
- Управление бесколлекторным мотором с датчиками Холла (Sensored brushless motors)
- Управление бесколлекторными моторами без бездатчиков (Sensorless BLDC)
- Запуск бесколлекторного мотора без бездатчиков (Sensorless BLDC)
- Определение положения ротора бесколлекторного мотора в остановленном состоянии
- Регулятор бесколлекторного мотора. Структура (ESC)
- Схема регулятора бесколлекторного мотора (Схема ESC)
- Силова частина регулятора BLDC двигунів
- Література по безколекторним двигунам.
- Безколекторні двигуни. Приклади програм для мікроконтролера
- Схема регулятора BLDC на STM32
- STM32.
 Приклад. Керування безколекторним двигуном (BLDC)
Приклад. Керування безколекторним двигуном (BLDC) - STM32. Приклад. Керування PMSM. Приклади програм
- Видео о бесколлекторных моторах. BLDC, PMSM, векторное управление (російською)
 Приклад. Керування безколекторним двигуном (BLDC)
Приклад. Керування безколекторним двигуном (BLDC)Поле-ориентированное управление (FOC) — глубокое погружение
Щеточные, бесщеточные двигатели постоянного тока (BLDC) и шаговые двигатели — это три наиболее часто используемых типа двигателей для позиционирования и управления скоростью перемещения. Из них бесколлекторные двигатели постоянного тока и шаговые двигатели являются «многофазными», что означает, что им требуется некоторый тип внешнего возбуждения катушки, чтобы поддерживать движение двигателя.
В этом подробном обзоре будут рассмотрены самые популярные методы управления движением, в том числе ориентированное на поле управление (FOC), для управления многофазным двигателем, с целью определить, какие методы управления лучше всего подходят для позиционирования и высокоскоростных приложений.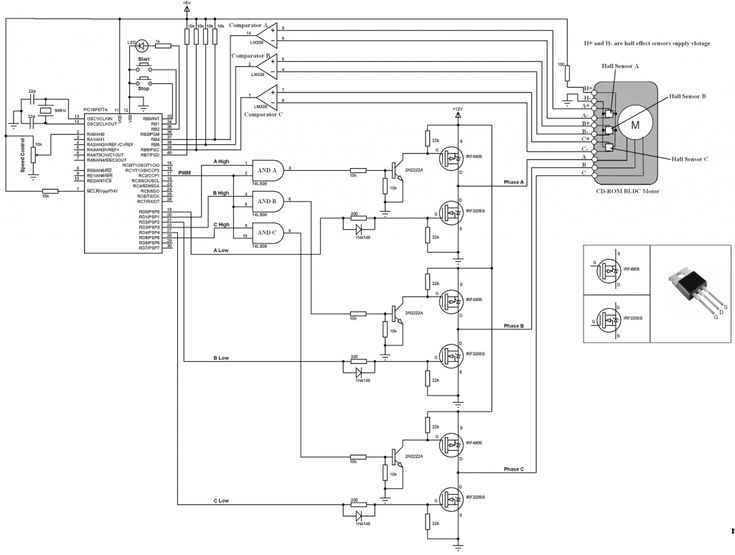
Хвост двух векторов
Для бесколлекторных двигателей постоянного тока магнитные поля генерируются магнитами, установленными непосредственно на роторе, и катушками в статоре. Обмотки статора обычно имеют трехфазную конфигурацию и расположены на расстоянии 120 электрических градусов друг от друга. Это сумма сил, создаваемых этими тремя фазами, которая в конечном итоге создает полезное вращение двигателя.
В зависимости от того, как приводятся в действие отдельные магнитные катушки, они могут взаимодействовать, создавая силу, которая не создает крутящего момента, или они могут создавать силу, которая создает вращение. Эти два разных вида силы известны как квадратурная (Q) и прямая (D), при этом полезные квадратурные силы (не путать со схемой квадратурного кодирования для устройств обратной связи по положению) действуют перпендикулярно оси полюса ротора, а Прямые силы, не создающие крутящий момент, действуют параллельно оси полюса ротора (рис. 1).
Рис. 1: Квадратные и прямые силы
1: Квадратные и прямые силы
Хитрость в создании вращения состоит в том, чтобы максимизировать Q (квадратуру) при минимизации D (прямого) создания крутящего момента. Если угол ротора измеряется с помощью датчика Холла или датчика положения, направление магнитного поля от ротора известно.
Шестиступенчатая коммутация — это простой метод, при котором считываются датчики Холла и возбуждаются катушки в определенной последовательности. Недостатком этого метода является то, что для многих двигателей он теряет некоторую эффективность и не такой плавный, как более продвинутые методы. Это связано с тем, что выходной управляющий сигнал для каждой катушки резко изменяется при считывании нового состояния Холла, что происходит каждые 60 электрических градусов. Оба этих явления можно увидеть на рис. 2, на котором показано снижение крутящего момента, связанное с наличием только шести измеряемых углов вектора на электрический оборот.
Рис. 2. Снижение крутящего момента по сравнению с датчиками Холла
Такая производительность хороша для простых задач вращения или приложений, в которых двигатель имеет пониженную передачу. Но для систем, которым требуется более плавное движение и более высокая производительность, два передовых метода: синусоидальное управление и управление, ориентированное на поле (FOC), обеспечивают скачок производительности.
Но для систем, которым требуется более плавное движение и более высокая производительность, два передовых метода: синусоидальное управление и управление, ориентированное на поле (FOC), обеспечивают скачок производительности.
Управление, ориентированное на поле (FOC)
Управление, ориентированное на поле (FOC), является важным подходом к управлению бесколлекторными двигателями постоянного тока. Это напоминает синусоидальную коммутацию, но добавляет важный математический поворот.
Рисунок 3a: Синусоидальная коммутация
Рисунок 3b: Управление, ориентированное на поле
На рисунке 3a показаны схемы управления как для синусоидальной коммутации, так и для управления, ориентированного на поле. При синусоидальном подходе к управлению команда крутящего момента «векторизуется» с помощью синусоидальной справочной таблицы, тем самым вырабатывая отдельную команду для каждой обмотки двигателя. По мере продвижения ротора угол обзора увеличивается в натуральной форме.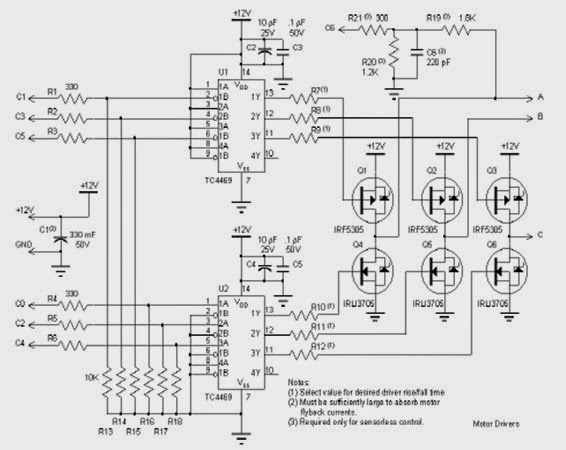 Как только векторизованная фазовая команда сгенерирована, она передается в токовую петлю, по одной для каждой обмотки, которая пытается поддерживать фактический ток обмотки на желаемом значении тока.
Как только векторизованная фазовая команда сгенерирована, она передается в токовую петлю, по одной для каждой обмотки, которая пытается поддерживать фактический ток обмотки на желаемом значении тока.
Важной характеристикой этого подхода является то, что по мере увеличения частоты вращения двигателя возрастает проблема поддержания желаемого тока. Это связано с тем, что на токовую петлю влияет частота вращения. Отставание в токовой петле, незначительное при низких скоростях вращения, создает увеличивающееся количество D (нежелательного) крутящего момента при более высоких скоростях вращения, что приводит к уменьшению доступного крутящего момента.
Схема управления ВОК, рис. 3b, отличается тем, что токовая петля происходит без привязки к вращению двигателя. То есть независимо от вращения двигателя. В подходе FOC есть две токовые петли, одна для крутящего момента Q, а другая для крутящего момента D. Контур крутящего момента Q приводится в действие требуемым пользователем крутящим моментом от сервоконтроллера. Контур D управляется входной командой, равной нулю, чтобы свести к минимуму нежелательную составляющую прямого крутящего момента.
Контур D управляется входной командой, равной нулю, чтобы свести к минимуму нежелательную составляющую прямого крутящего момента.
Хитрость, позволяющая выполнить всю эту работу, заключается в выполнении математических операций преобразования, которые преобразуют векторизованный фазовый угол в опорную систему координат D и Q с разыменованными ссылками и из нее. Известные как преобразователи Park и Clarke , их практическое применение в бесколлекторных приводах постоянного тока стало обычным явлением благодаря наличию недорогих, высокопроизводительных цифровых сигнальных процессоров и микропроцессоров.
Почему я не могу пожарить яичницу на этом моторе?
Итак, что дает все это волшебство, кроме пожизненного трудоустройства для математических специальностей? Ответ: (барабанная дробь…) более высокая максимальная скорость и, что часто не менее важно, более высокая эффективность привода двигателя.
Контроллеры двигателя, в которых используется метод FOC, могут управлять двигателем более эффективно, до 97 % в некоторых приложениях. Это преимущество особенно заметно на более высоких скоростях.
Это преимущество особенно заметно на более высоких скоростях.
Как оказалось, методы FOC также могут повысить максимальную скорость шаговых двигателей, особенно если шаговый двигатель приводится в действие с помощью шагового двигателя с замкнутым контуром (также иногда называемого шаговый сервопривод ). Хотя шаговые двигатели, как правило, являются двухфазными, а не трехфазными устройствами, к ним применяются все те же концепции сил D и Q, которые обсуждались выше. А поскольку шаговый двигатель с замкнутым контуром приводит в движение шаговый двигатель с использованием сервопривода с переменной командой крутящего момента, а не с командой фиксированного крутящего момента, возможно резкое снижение тепловыделения в шаговом двигателе.
Вас также может заинтересовать: Новая технология управления сочетает в себе производительность сервопривода и стоимость шагового двигателя
Где B-Field отправляется в путь
В следующей таблице показаны некоторые распространенные приложения, которые получают наибольшую пользу от Field Oriented Control (FOC):
Преимущества
Типичные приложения
5
- Центрифуги
- Шпиндели станков
- Сканеры штрих-кода
- Барабанные сканеры и принтеры
- Научные приборы
- Высокоскоростные воздуходувки/компрессоры
Более высокая эффективность
- Электромобили
- Портативные приложения
- Термочувствительные изделия
В лабораторию!
На приведенной ниже диаграмме показана простая демонстрационная установка в лаборатории PMD, демонстрирующая повышение производительности за счет FOC по сравнению с коммутацией на основе Холла. В этом приложении высокоскоростной вентилятор имеет внутренний высокоскоростной двигатель BLDC и подключен к цифровому приводу ION от Performance Motion Devices.0015 .
В этом приложении высокоскоростной вентилятор имеет внутренний высокоскоростной двигатель BLDC и подключен к цифровому приводу ION от Performance Motion Devices.0015 .
Рис. 4. Иллюстрация настройки аппарата для видео ниже
Ссылки на видео ниже показывают визуальную разницу в эффективности двигателя между методами FOC и методом Холла.
Первое видео показывает, как воздуходувка управляет автомобилем, используя управление, ориентированное на поле.
На втором видео показана точно такая же установка с коммутацией на основе Холла.
При использовании режимов управления Холла или FOC, как показано выше, ION получил простую команду для запуска двигателя с максимально возможной скоростью. В каждом случае напряжение питания было одинаковым, @ 24 В.
В каждом случае напряжение питания было одинаковым, @ 24 В.
В этих условиях метод Холла приводил в движение шпиндель нагнетателя со скоростью 17 895 об/мин, а метод FOC приводил в движение нагнетатель со скоростью 29 310 об/мин — примерно на 64% быстрее!
На самом деле разница в производительности больше, чем можно было бы ожидать, что может быть связано с тем, что двигатель не выполняет много работы (кроме как дует игрушечная машинка). Но принцип остается тем, что, в частности, на высоких скоростях управление с ориентацией поля (FOC) может обеспечить значительные преимущества в производительности по сравнению с методами коммутации на основе Холла и синусоидальной коммутации.
Продукты PMD, обеспечивающие ориентированное на поле управление
Компания Performance Motion Devices уже более двадцати пяти лет производит ИС управления движением , которые обеспечивают расширенное управление положением и крутящим моментом шаговых двигателей, щеточных и бесщеточных двигателей постоянного тока. С тех пор мы также встроили эти микросхемы в модули и платы plug and play. Несмотря на различия в упаковке, все эти продукты управляются C-Motion , простым в использовании языком управления движением PMD и идеально подходят для использования в лабораторное оборудование , управление шпинделем, работа с жидкостями и широкий спектр других высокопроизводительных приложений управления движением.
С тех пор мы также встроили эти микросхемы в модули и платы plug and play. Несмотря на различия в упаковке, все эти продукты управляются C-Motion , простым в использовании языком управления движением PMD и идеально подходят для использования в лабораторное оборудование , управление шпинделем, работа с жидкостями и широкий спектр других высокопроизводительных приложений управления движением.
Семейство микросхем Juno
Семейство микросхем Juno идеально подходит для создания собственного недорогого высокопроизводительного контроллера шпинделя. Junos преуспевает в управлении скоростью и крутящим моментом благодаря таким функциям, как FOC (Field Oriented Control), генерация профиля, генерация сигнала управления переключающим усилителем высокого/низкого уровня, определение тока в плече и многое другое. Доступные в упаковках размером 7 мм x 7 мм и стоимостью 12 долларов США, эти ИС являются идеальным решением для вашей следующей конструкции шпинделя и контроллера насоса.
Узнать больше >>
ИС серии MC58113
ИС серии MC58113 являются частью популярного семейства интегральных схем управления движением Magellan, подобных щеточным двигателям PMD, двигателям постоянного тока BL, а также шаговым двигателям постоянного тока и шаговым двигателям. . Стандартные функции включают автонастройку, профилирование s-образной кривой, FOC (Field Oriented Control), управление высоким/низким переключаемым сигналом, прямой энкодер, ввод импульсов и направления и многое другое. Независимо от того, используются ли они для автоматизации лабораторий, управления насосами, систем наведения или автоматизации общего назначения, семейство ИС MC58113 является идеальным решением для вашей следующей конструкции машины.
Узнать больше >>
Цифровые приводы ION
Цифровые приводы ION сочетают в себе одноосную интегральную схему Magellan IC и сверхэффективный цифровой усилитель в компактном прочном корпусе.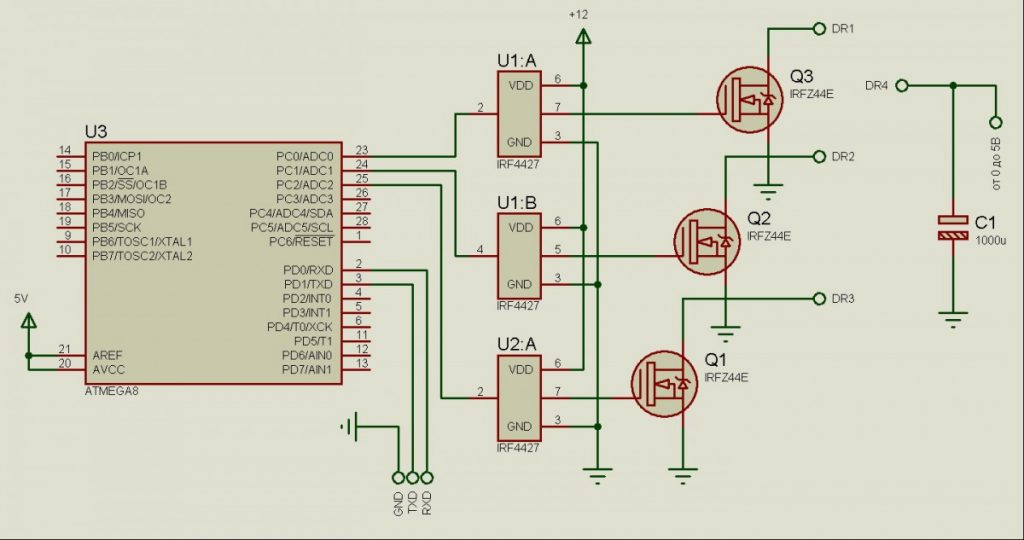 В дополнение к расширенному управлению серводвигателем, ION обеспечивают S-образное перемещение от точки к точке, управление питанием i2T, загружаемый код пользователя и ряд функций безопасности, включая обнаружение перегрузки по току, перенапряжению и перегреву. ION — это простые в использовании устройства plug and play, которые мгновенно запустят ваше приложение.
В дополнение к расширенному управлению серводвигателем, ION обеспечивают S-образное перемещение от точки к точке, управление питанием i2T, загружаемый код пользователя и ряд функций безопасности, включая обнаружение перегрузки по току, перенапряжению и перегреву. ION — это простые в использовании устройства plug and play, которые мгновенно запустят ваше приложение.
Подробнее >>
Вас также может заинтересовать:
- Сборка или покупка трехосевого контроллера движения
- Упреждение в управлении движением — крайне важно для повышения точности позиционирования
- Два подхода к созданию платы контроллера 3-осевого портала
- Настройка серводвигателя — ракетостроение или прогулка в парке
- Прецизионная перекачка жидкости: все в насосе
- Новый метод управления сочетает в себе производительность сервопривода и стоимость шагового двигателя
SimpleFOC раскрывает тайну прецизионного управления двигателем BLDC
- автор:
Джошуа Васкес
Бесколлекторные двигатели постоянного тока
(BLDC) являются стандартным оборудованием для низкоточных и быстрых RC-приложений. Схемы управления, необходимые для их медленной или точной работы, углубляются в теорию двигателей и могут сделать эти двигатели недоступными для вашего следующего проекта самодельного робота. [Антун Скурич] и команда стремятся изменить именно это. Они взяли ориентированный на поле алгоритм управления и инкапсулировал его в компактную библиотеку Arduino, добавил множество примеров и для загрузки создал наращиваемый щит управления двигателем BLDC. Сумма их усилий отражена в проекте SimpleFOC, целью которого является предоставление точного управления BLDC широкому сообществу новых хакеров.
Схемы управления, необходимые для их медленной или точной работы, углубляются в теорию двигателей и могут сделать эти двигатели недоступными для вашего следующего проекта самодельного робота. [Антун Скурич] и команда стремятся изменить именно это. Они взяли ориентированный на поле алгоритм управления и инкапсулировал его в компактную библиотеку Arduino, добавил множество примеров и для загрузки создал наращиваемый щит управления двигателем BLDC. Сумма их усилий отражена в проекте SimpleFOC, целью которого является предоставление точного управления BLDC широкому сообществу новых хакеров.
Field-Oriented Control — это схема управления двигателем BLDC, которая включает использование микропроцессора для управления током обмотки статора таким образом, чтобы он всегда прикладывал крутящий момент к ротору. Для этого требуется, чтобы ваш процессор измерял как ток двигателя (представьте: шунтирующий резистор), так и положение ротора (представьте: энкодер). Однако реализация алгоритма может оказаться немного сложной, поскольку он затрагивает элементы линейной алгебры, физики двигателей и теории управления.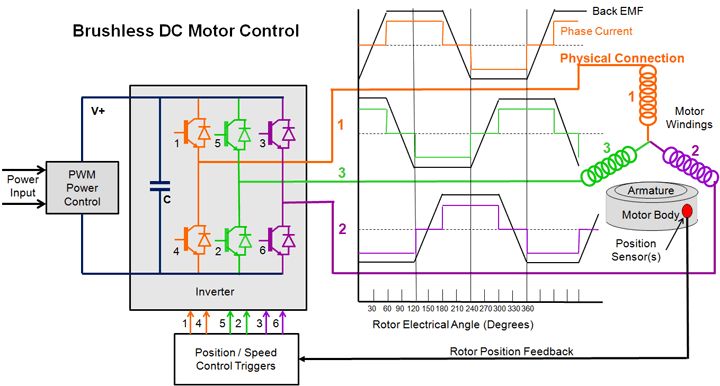 Но в этом и заключается магия SimpleFOC. С библиотекой у вас под рукой, вам не нужно! И вместе с этим самая сложная часть управления бесщеточным двигателем стала проще благодаря решению, которое практически «включай и работай».
Но в этом и заключается магия SimpleFOC. С библиотекой у вас под рукой, вам не нужно! И вместе с этим самая сложная часть управления бесщеточным двигателем стала проще благодаря решению, которое практически «включай и работай».
SimpleFOC был реализован для расширения множества возможных реализаций. Хотя вы, безусловно, можете разработать свою собственную плату управления, вы также можете начать с моторного щита SimpleFOC для одного двигателя, потребляющего ток до 5 А. Оттуда у вас есть довольно широкий выбор микроконтроллеров, поскольку библиотека была расширена для работы с Arduino, Teensy, STM32 и некоторыми другими семействами микроконтроллеров. Для деталей реализации, теории и настройки существует целый набор документации, на которую можно ссылаться. И если вы хотите поделиться своим проектом или задать вопросы, вы можете зайти на форум сообщества, чтобы получить несколько советов и советов. Лучше всего то, что исходный код был предложен для вашего удовольствия под щедрой лицензией MIT.