Содержание
Особенности векторного управления электроприводами. Рынок Электротехники. Отраслевой портал
Практически все электроприводы Unidrive от Control Techniques используют векторное управление двигателем, за счет которого расширяется диапазон частот, в которых может эффективно работать привод (номинальный крутящий момент развивается на частоте 1 Гц в разомкнутом контуре, 0 Гц — в замкнутом контуре). Привод Unidrive может устойчиво работать на скоростях вплоть до 0,001 об/мин, что эквивалентно одному обороту вала двигателя за 16 часов. Частота 0 Гц в замкнутом контуре фактически означает возможность привода удерживать вал двигателя в одном положении при меняющейся нагрузке.
Специфическая особенность привода Unidrive — возможность работы в режиме цифрового замка. Для этого информация об угловом положении вала двигателя одного привода (ведущего, оснащенного энкодером) передается в другой привод (ведомый). Вал ведомого двигателя начинает движение синхронно с движением вала ведущего двигателя (синхронизация может быть выполнена как по скорости, так и по положению).
При этом реализуется электронный вариант механической коробки передач. Передаточный коэффициент корректируется с точностью до 3 знаков после запятой, его можно менять динамически кнопками «больше/меньше» с помощью цифрового потенциометра. Число синхронизированных приводов не ограничено. Датчик положения (энкодер) можно ставить не только на вал двигателя, управляемого приводом Unidrive, но и на любую вращающуюся деталь, с которой нам нужно синхронизироваться. При этом отпадает необходимость в вариаторах и подобных им устройствах, которые требуют регулярного обслуживания. Для реализации режима цифрового замка Unidrive необходим модуль второго энкодера или модуль для включения в сеть CTNet. Описанные возможности применимы в робототехнике, металлообрабатывающих станках, машинах многоцветной печати и т.д.
Режим рекуперации энергии применяется в тех случаях, когда нагрузка двигателя имеет большую механическую инерцию и способна высвобождать накопленную кинетическую энергию при торможении. При этом будет происходить отдача электроэнергии приводом обратно в питающую сеть.
При этом будет происходить отдача электроэнергии приводом обратно в питающую сеть.
Использование данного режима приводит к значительному снижению потребления энергии. Может использоваться в устройствах, обладающих большой механической инерцией и способных отдавать накопленную кинетическую энергию при торможении. В данном режиме используются два привода Unidrive, связанных по шине постоянного тока, один в двигательном режиме, другой в режиме рекуперации. При торможении двигателя энергия начинает поступать на шину постоянного тока двигателя, работающего в двигательном режиме, и передается в двигатель, работающий в режиме рекуперации, который генерирует из него переменное напряжение 380 В и отдает его обратно в сеть. В результате мы получаем экономию электроэнергии. Данный режим включается изменением значения параметра, определяющего режим работы привода.
1. Разомкнутый контур со скалярным управлением
Обратная связь не требуется, двигатель – стандартный асинхронный двигатель переменного тока. Скалярное управление является традиционным способом управления двигателем (в противоположность более современному способу векторного регулирования). Минимальная скорость, на которой развивается номинальный крутящий момент — 15-20Гц.
Скалярное управление является традиционным способом управления двигателем (в противоположность более современному способу векторного регулирования). Минимальная скорость, на которой развивается номинальный крутящий момент — 15-20Гц.
2. Векторное управление в разомкнутом контуре
Обратная связь здесь также не требуется, двигатель – стандартный асинхронный двигатель переменного тока. Векторное управление предоставляет возможность проведения специальной процедуры – автонастройки, в процессе которой привод очень точно измеряет параметры подключенного к нему двигателя: сопротивления обмоток статора, их индуктивность, индуктивность рассеивания, ток намагничивания и т.д. Векторное управление включается специальным параметром в приводе. Точность поддержания скорости 1%, минимальная скорость, на которой развивается номинальный крутящий момент – 1 Гц.
3. Векторное управление в замкнутом контуре
Двигатель – асинхронный двигатель переменного тока. Требует наличия датчика обратной связи по скорости/положению вала двигателя (например, инкрементального энкодера). За счет введения обратной связи точность поддержания скорости возрастает на два порядка, плюс появляется возможность управления угловым положением вала двигателя. Становится возможной работа в режиме электрического вала, когда вал двигателя вращается строго синхронно с какой-либо другой координатой, которая механически соединена с датчиком обратной связи (энкодером), подключенным к Unidrive. Точность поддержания скорости 0,01%, минимальная скорость, на которой развивается номинальный крутящий момент — 0 Гц.
Требует наличия датчика обратной связи по скорости/положению вала двигателя (например, инкрементального энкодера). За счет введения обратной связи точность поддержания скорости возрастает на два порядка, плюс появляется возможность управления угловым положением вала двигателя. Становится возможной работа в режиме электрического вала, когда вал двигателя вращается строго синхронно с какой-либо другой координатой, которая механически соединена с датчиком обратной связи (энкодером), подключенным к Unidrive. Точность поддержания скорости 0,01%, минимальная скорость, на которой развивается номинальный крутящий момент — 0 Гц.
4. Серворежим
Требует серводвигателя (бесщеточного электродвигателя переменного тока с постоянными магнитами на роторе). В сочетании с таким двигателем система имеет отличные динамические характеристики (в среднем в 15-20 раз лучшие, чем в замкнутом контуре с векторным управлением). Точность поддержания скорости 0,01%, развитие номинального крутящего момента при нулевой скорости вращения. Данный режим применяется в наиболее ответственных задачах, требующих высоких динамических и точностных показателей регулирования. Режим цифрового замка (электрический вал)
Данный режим применяется в наиболее ответственных задачах, требующих высоких динамических и точностных показателей регулирования. Режим цифрового замка (электрический вал)
Настройка всех приводов Control Techniques практически одинакова и отличается лишь в деталях, она может быть проведена как вручную (с панели управления привода), так и с помощью специального «софта», запущенного на персональном компьютере.
Удобная структура меню: Все параметры привода разбиты на функциональные группы, названные «меню». В каждом меню хранятся параметры, определяющие работу какого-либо функционального блока привода: меню 1- задание скорости, меню 2-величины ускорения/замедления и т.д. Наиболее часто используемые параметры вынесены в специальное меню – «Меню 0».
Гибкая, перестраиваемая структура привода: Большинство функций в приводе могут быть перепрограммированы пользователем в соответствии со своими потребностями. Например, сигнал, поданный на аналоговый вход, может управлять скоростью, крутящим моментом, быть прецизионным смещением, прибавляемым к заданному цифровому значению скорости, служить входным сигналом для ПИД регулятора, сравниваться компаратором с некоторым пороговым значением, по достижении которого привод меняет режим работы и т. д.
д.
Имеется набор дополнительных модулей, расширяющих возможности приводов. Все модули относительно дешевы, не требуют дополнительного пространства для установки (устанавливаются прямо внутрь привода), не требуют подачи питания (питание поступает от привода).
Имеются следующие модули:
· Одноосевой сервоконтроллер, управляющий траекторией движения управляемого механизма. Программируется на специальном языке DPL (Drive Programming Language, основан на языке BASIC), обеспечивающем точное управление позицией вала двигателя в реальном масштабе времени.
· Модули для включения привода в промышленные сети Profibus, Interbus, Device Net, CTNet, Modbus +, SLM, CANopen, SERCOS, CAN, Ethernet
· Модули для подключения дополнительных входов/выходов
· Модули для подключения дополнительных внешних устройств (внешнего энкодера от ведущего привода) или альтернативного датчика обратной связи.
Встроенный ПИД регулятор: имеет входы для подачи заданного значения (уставки) и текущего значения контролируемого параметра. На эти входы могут быть поданы сигналы от любого источника: аналоговый вход (обычно сигнал от датчика), цифровое значение, выход от автоматического потенциометра, значение, переданное по сети и т.д.
На эти входы могут быть поданы сигналы от любого источника: аналоговый вход (обычно сигнал от датчика), цифровое значение, выход от автоматического потенциометра, значение, переданное по сети и т.д.
Встроенные логические функции: две операции логического «и» с возможностью инвертирования всех входов и выходов позволяют реализовать любые логические функции: И, И-НЕ, ИЛИ, ИЛИ-НЕ, НЕ. На выходе функций встроена задержка переднего фронта полученного сигнала, позволяющая проверить наличие сигнала в течение некоторого времени (для исключения ложных срабатываний и т.д.). На входы функций можно подать любой цифровой сигнал, существующий внутри или снаружи привода.
Типичный пример использования такой функции: если скорость двигателя меньше 1 об/мин (сигнал сравнения поступает от компаратора), ток двигателя больше 130% от номинального (сигнал сравнения поступает со второго компаратора).
И если эта ситуация продолжается более трех секунд (включена задержка переднего фронта на три сек. ), то необходимо остановить двигатель, так как такая ситуация характерна для механического заклинивания вала.
), то необходимо остановить двигатель, так как такая ситуация характерна для механического заклинивания вала.
Встроенные входы/выходы: все приводы имеют несколько цифровых и аналоговых входов и выходов (в среднем по три каждого типа), режимы аналоговых входов(4-20 мА, 0-20 мА, +/-10 В) и цифровых (положительная или отрицательная логика управления, выход +24 В или выход с открытым коллектором), которые свободно программируются. Число входов/выходов в приводах Control Techniques больше, чем в приводах других производителей, причем некоторые клеммы могут быть запрограммированы на работу, как в качестве входа, так и выхода.
Кроме стандартных функций, которые обычно выполняют цифровые входы в приводах всех производителей (старт/стоп привода, выбор направления вращения, сброс ошибки привода), в приводах Control Techniques входы могут использоваться для:
· выбора номера используемой предустановленной скорости (всего до 8 предустановок)
· включения/выключения функциональных блоков: ПИД регулятор, компаратор, логические функции, аналоговые входы, автоматический потенциометр.
Векторное управление электродвигателем «на пальцах» / Хабр
— Что такое векторное управление?
— Держать ток под 90 градусов.
Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно вот такие вот попытки как-то закрутить двигатель без использования мат.части. Но на самом деле векторное управление – это очень просто, если понимать принцип его работы «на пальцах». А там уже и с формулами разбираться в случае надобности будет веселее.
Рассмотрим принцип работы самого простого двигателя переменного тока – синхронной машины с постоянными магнитами. Удобный пример – компас: его магнитная стрелка представляет из себя ротор синхронной машины, а магнитное поле Земли – магнитное поле статора. Без внешней нагрузки (а в компасе её нет, если не считать трение и жидкость, гасящую колебания стрелки) ротор всегда ориентируется по полю статора. Если мы будем держать компас и вращать под ним Землю, то стрелка будет крутиться вслед, совершая работу по перемешиванию жидкости внутри компаса. Но есть и чуть более простой способ – можно взять внешний магнит, например, в виде стержня с полюсами на концах, поле которого значительно сильнее магнитного поля Земли, поднести его к компасу сверху и вращать магнит. Стрелка будет двигаться вслед за вращающимся магнитным полем. В настоящем синхронном двигателе поле статора создается электромагнитами – катушками с током. Схемы обмоток там сложные, но принцип один – они создают статором магнитное поле, направленное в нужную сторону и имеющее нужную амплитуду. Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
Рисунок 1. Принцип действия синхронной электрической машины
Магнитный поток катушки пропорционален току в ней (в первом приближении). Нас будет интересовать магнитный поток от статора в том месте, где расположен ротор, т.е. в центре рисунка (краевыми эффектами, рассеянием и всем прочим пренебрегаем). Магнитные потоки двух перпендикулярно расположенных катушек векторно складываются, образуя для взаимодействия с ротором один общий поток. Но так как поток пропорционален току в катушке, удобно рисовать непосредственно вектора токов, сонаправив их с потоком. На рисунке показаны некоторые токи Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке ротор расположен в произвольном положении, но из этого положения ротор будет стремиться повернуться согласно магнитному потоку статора, т.е. по вектору Is (положение ротора в этом случае показано пунктирной линией). Соответственно, если подать ток только в фазу α, скажем, Iα = 1А, ротор встанет горизонтально, а если в β, вертикально, а если приложить Iβ = -1А то перевернется на 180 градусов. Если запитать ток Iα по закону синуса, а Iβ по закону косинуса от времени, то будет создано вращающееся магнитное поле. Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
Давайте нарисуем график момента двигателя в зависимости от углового положения вала ротора и вектора тока Is статора – угловую характеристику синхронного двигателя. Эта зависимость синусоидальная (Рисунок 2).
Эта зависимость синусоидальная (Рисунок 2).
Рисунок 2. Угловая характеристика синхронной машины (здесь есть некоторая историческая путаница со знаками момента и угла, из-за чего часто рисуют характеристику перевернутой относительно горизонтальной оси).
Чтобы получить этот график на практике, можно поставить на вал ротора датчик вращающего момента, затем включить любой вектор тока, например, просто подать ток в фазу α. Ротор повернется в соответствующее положение, которое нужно принять за ноль. Потом через датчик момента «руками» нужно поворачивать ротор, фиксируя на графике в каждой точке угол θ, на который повернули, и момент, который показал датчик. Т.е. нужно растягивать «магнитную пружину» двигателя через датчик момента. Самый большой момент окажется при угле в 90 градусов от вектора тока (от начала). Амплитуда получившегося максимального момента Ммакс пропорциональна амплитуде приложенного вектора тока. Будет приложен 1А, получим, скажем, Ммакс = 1 Н∙м (ньютон*метр, единица измерения вращающего момента), если подадим 2А, получим Ммакс = 2 Н∙м.
Из этой характеристики следует, что двигатель развивает наибольший момент, когда ротор находится под 90° к вектору тока. Так как мы при создании системы управления на микроконтроллере хотим получить от двигателя наибольший момент при минимуме потерь, а потери, в первую очередь, это ток в обмотках, то рациональнее всего ставить вектор тока всегда под 90° к магнитному полю ротора, т.е. перпендикулярно магниту на рисунке 1. Нужно поменять всё наоборот – не ротор едет к задаваемому нами вектору тока, а мы задаем вектор тока всегда под 90° к ротору, как бы он там не вращался, т.е. «прибить» вектор тока к ротору. Регулировать же момент двигателя будем амплитудой тока. Чем больше амплитуда – тем выше момент. А частота вращения, частота тока в обмотках это уже «не наше» дело – какая получится, как ротор будет вращаться, так и будет – мы управляем моментом на валу. Как ни странно, именно это и называется векторным управлением – когда мы управляем вектором тока статора так, чтобы он был под 90° к магнитному полю ротора. Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Но как векторное управления достигается на практике? Очевидно, для начала понадобится знать положение ротора, чтобы было относительно чего отмерять 90°. Это проще всего сделать установив, собственно, датчик положения на вал ротора. Потом нужно разобраться, как создать вектор тока, поддерживая желаемые токи в фазах α и β. На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение.
Поддерживать ток микроконтроллером можно использовав программный ПИ (пропорционально-интегральный) регулятор тока и ШИМ. Например, структура с регулятором тока для одной фазы α показана ниже (Рисунок 3).
Рисунок 3. Замкнутая по току структура управления для одной фазы
Здесь задание тока iα_зад – некая константа, тот ток, который мы хотим поддерживать для этой фазы, например 1А. Задание поступает на сумматор регулятора тока, раскрытая структура которого показана выше. Если читатель не знает, как работает ПИ-регулятор – то увы и ах. Могу лишь посоветовать что-то из этого. Регулятор тока на выходе задает напряжение фазы Uα. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это Uα. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Дальше, возможно, некоторые читатели уже подумали, что до векторной структуры управления осталось дело за малым – нужно поставить два регулятора тока, на каждую фазу по регулятору, и формировать на них задание в зависимости от угла с датчика положения ротора (ДПР), т.е. сделать что-то типа такой структуры (Рисунок 4):
Рисунок 4. Неправильная (наивная) структура векторного управления
Так делать нельзя. При вращении ротора переменные iα_зад и iβ_зад будут синусоидальными, т.е. задание на регуляторы тока будет всё время меняться. Быстродействие регулятора не бесконечно, поэтому при изменении задания он не мгновенно его отрабатывает. Если задание постоянно менять, то регулятор будет всё время его догонять, никогда не достигая. И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
Рисунок 5. Структура векторного датчикового управления для двухфазной синхронной машины
Здесь добавились два блока – БКП_1 и БКП_2: блоки координатных преобразований. Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ, а БКП_2 на —ϴ. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям d и q, привязанных к ротору двигателя (используя для этого угол положения ротора ϴ). А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Рисунок 6. Координатные преобразования из неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям осям d и q, привязанных к ротору
То есть вместо «вращения» задания регуляторов (как было в прошлой структуре), вращаются их входы и выходы, а сами регуляторы работают в статическом режиме: токи d, q и выходы регуляторов в установившемся режиме постоянны. Оси d и q вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси q регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток d сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Для объяснения «на пальцах» можно привести какую-нибудь аналогию.
Для линейного движения пусть это будет, например, городской автобус. Он всё время то разгоняется, то тормозит, то едет назад и вообще ведёт себя как хочет: это ротор двигателя. Также есть вы на автомобиле рядом, едете параллельно: ваша задача быть ровно посредине автобуса: «держать 90°», вы – это регуляторы тока. Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Приведенная выше структура действительно работает и используется в современных электроприводах. Только в ней не хватает целой кучи мелких «улучшалок», без которых её уже не принято делать, типа компенсации перекрестных связей, разных ограничений, ослабления поля и т.п. Но базовый принцип именно такой.
А если нужно регулировать не момент привода, а всё-таки скорость (по правильному угловую скорость, частоту вращения)? Ну тогда ставим еще один ПИ-регулятор – регулятор скорости (РС). На вход подаем задание скорости, а на выходе имеем задание момента. Так как ток оси q пропорционален моменту, то можно для упрощения выход регулятора скорости подать сразу на вход регулятора тока оси q, вот так (Рисунок 7):
Рисунок 7. Регулятор скорости для векторного управления
Здесь ЗИ – задатчик интенсивности, плавно изменяет свой выход, чтобы двигатель разгонялся с нужным темпом, а не гнал на полном токе до задания скорости. Текущая частота вращения ω взята из обработчика датчика положения ротора, так как ω это производная от углового положения ϴ. Ну или можно просто время между импульсами датчика засекать…
Текущая частота вращения ω взята из обработчика датчика положения ротора, так как ω это производная от углового положения ϴ. Ну или можно просто время между импульсами датчика засекать…
Как сделать тоже самое для трехфазного двигателя? Ну, собственно, ничего особенного, добавляем еще один блок и меняем модуль ШИМ (Рисунок 8).
Рисунок 8. Структура векторного датчикового управления для трехфазной синхронной машины
Трехфазные токи, точно так же как и двухфазные, служат для одной цели – создать вектор тока статора Is, направленный в нужную сторону и имеющий нужную амплитуду. Поэтому трехфазные токи можно просто пересчитать в двухфазные, а дальше оставить ту же систему управления, что уже была собрана для двухфазной машины. В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, эта операция производится блоком фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Рисунок 9. Фазные преобразования – из трех фаз к двум. Для удобства принимаем равенство амплитуды вектора Is амплитуде тока в фазе
Думаю, комментарии не нужны. Немного слов про ток фазы C. Туда можно не ставить датчик тока, так как три фазы двигателя соединены в звезду, и по закону Кирхгофа всё, что втекло через две фазы, должно вытечь из третьей (если, конечно, у вас в двигателе не пробита изоляция, и половина не утекла куда-то на корпус), поэтому ток фазы C вычисляют как скалярную сумму токов фаз A и B со знаком минус. Хотя третий датчик иногда ставят чтобы снизить погрешность измерений.
Также нужна полная переделка модуля ШИМ. Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё ещё в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
Посчитаем. Пусть у вас есть классический преобразователь частоты, питающийся от промышленной трехфазной сети 380В 50Гц. Здесь 380В это линейное (между фазами) действующее напряжение. Так как в преобразователе стоит выпрямитель, он выпрямит это напряжение и на шине постоянного тока окажется напряжение, равное амплитудному линейному напряжению, т.е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т. е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
Рисунок 10. Изменение потенциалов фаз для скалярной и векторной ШИМ
Кстати, а какие датчики положения используются для векторного управления? Чаще всего используются четыре типа датчиков. Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик.
Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик.
Квадратурный энкодер не выдает абсолютного положения ротора – по своим импульсам он позволяет лишь определить, сколько вы проехали, но не куда и откуда (как начало и конец связаны с расположением магнита ротора). Поэтому для векторного управления синхронной машиной сам по себе он не подходит. Немного спасает ситуацию его реперная метка (индекс) – она одна на механический оборот, если до неё доехать, то абсолютное положение становится известно, а от неё можно уже отсчитывать сколько проехали квадратурным сигналом. Но как до этой метки доехать в начале работы? В общем, это не всегда удобно.
Датчик на основе элементов Холла – это грубый датчик. Он выдает всего несколько импульсов на оборот (в зависимости от кол-ва элементов Холла, для трехфазных двигателей их обычно три, т.е. шесть импульсов), позволяя знать положение в абсолютной величине, но с низкой точностью. Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
Рисунок 11. Работа датчика положения на элементах Холла для трехфазной машины и экстраполяция его сигнала
Часто для серводвигателей используется сочетание энкодера и датчика Холла. В этом случае можно сделать единый программный модуль их обработки, убирая недостатки обоих: делать экстраполяцию угла, приведенную выше, но не по времени, а по меткам с энкодера. Т.е. внутри от фронта до фронта датчика Холла работает энкодер, а каждый фронт Холла чётко инициализирует текущее абсолютное угловое положение. В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В еще более дорогих применениях используют абсолютный датчик положения с цифровым интерфейсом (абсолютный энкодер), который сразу выдает абсолютное положение и позволяет не испытывать описанных выше проблем.
Если в электродвигателе очень жарко, а также когда требуется повышенная точность измерения угла, используют «аналоговый» сельсинный датчик (резольвер, вращающийся трансформатор). Это маленькая электрическая машина, используемая как датчик. Представьте, что в рассмотренной нами синхронной машине на рисунке 1 вместо магнитов стоит еще одна катушка, на которую мы подаем высокочастотный сигнал. Если ротор стоит горизонтально, то сигнал наведется только в катушку статора фазы α, если вертикально – то только в β, если перевернуть его на 180 – то изменится фаза сигнала, а в промежуточных положениях наводится и туда и сюда по закону синуса/косинуса. Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Есть еще много экзотических датчиков положения, особенно для сверхвысокоточных применений, например, для изготовления электронных чипов. Там в ход идут уже любые физические явления, чтобы только узнать положение наиболее точно. Их рассматривать не будем.
Как вы поняли, векторное управление достаточно требовательное – и датчиков положения ему наставь, и датчиков тока, и ШИМ ему векторную, и микроконтроллер не абы какой, чтобы всю эту математику обсчитывать. Поэтому для простых применений его упрощают. Для начала можно исключить датчик положения, сделав бездатчиковое векторное управление. Для этого используют немного больше математической магии, находящейся в желтом прямоугольнике (Рисунок 12):
Рисунок 12. Структура бездатчикового векторного управления
Наблюдатель – это такой блок, на который подается информация о приложенном к двигателю напряжении (например, из задания на модуль ШИМ) и о токах в двигателе с датчиков. Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т.
Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т. п.
п.
Можно пойти даже на еще большее упрощение. Коммутировать обмотки так, чтобы одна фаза всё время оказывалась «свободна» и к ней не прикладывался ШИМ. Тогда в ней можно измерять ЭДС (наведенное в катушке фазы напряжение), и, когда это напряжение переходит через ноль, использовать это как сигнал датчика положения ротора, потому что фаза этого наведенного напряжения зависит как раз от положения ротора. Получается бездатчиковая автокоммутация, что широко используется в различных простеньких приводах, например, в «регуляторах» для пропеллеров авиамоделей. При этом надо помнить, что ЭДС машины появляется только на относительно высокой частоте вращения, поэтому для старта такие системы управления просто не спеша перебирают фазы, надеясь, что ротор двигателя будет следовать за подаваемым током. Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т. п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Но иногда делают даже и еще большее упрощение. Можно совсем отказаться от микроконтроллера, ключей, датчиков положения и прочего, осуществляя переключение фаз специальным механическим коммутатором (Рисунок 13):
Рисунок 13. Механический коммутатор для переключения обмоток
При вращении ротор сам переключает свои части обмоток, меняя приложенное к ним напряжение, при этом ток в роторе протекает переменный. Коммутатор располагают таким образом, чтобы магнитный поток ротора и статора снова оказывался близким к 90 градусам, дабы достичь максимума момента. Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Все электрические машины работают схожим образом. В теории электропривода даже существует понятие «обобщенная электрическая машина», к которой сводят работу других. Показанные в статье объяснения «на пальцах» никоим образом не могут служить практическим руководством к написанию кода микроконтроллера. В статье рассмотрен хорошо если один процент информации, которая требуется для реализации настоящего векторного управления. Чтобы сделать что-то на практике, нужно, во-первых, знать ТАУ, хотя бы на уровне понимания, как работает ПИ-регулятор. Потом нужно всё-таки изучить математическое описание как синхронной машины, так и синтеза векторного управления. Также изучить векторную ШИМ, узнать, что такое пары полюсов, познакомиться с типами обмоток машин и прочее. Это можно сделать в свежей книге «Анучин А. С. Системы управления электроприводов. МЭИ, 2015», а также в «Калачев Ю. Н. Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения.
Показанные в статье объяснения «на пальцах» никоим образом не могут служить практическим руководством к написанию кода микроконтроллера. В статье рассмотрен хорошо если один процент информации, которая требуется для реализации настоящего векторного управления. Чтобы сделать что-то на практике, нужно, во-первых, знать ТАУ, хотя бы на уровне понимания, как работает ПИ-регулятор. Потом нужно всё-таки изучить математическое описание как синхронной машины, так и синтеза векторного управления. Также изучить векторную ШИМ, узнать, что такое пары полюсов, познакомиться с типами обмоток машин и прочее. Это можно сделать в свежей книге «Анучин А. С. Системы управления электроприводов. МЭИ, 2015», а также в «Калачев Ю. Н. Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения. Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в нашей статье Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье Способы отладки ПО микроконтроллеров в электроприводе. Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Продолжение статьи, где рассказано про асинхронные двигатели здесь.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
Векторное управление для чайников — Switchcraft
Эта статья объяснит, как векторное управление работает дружественным и безопасным способом. Однако сначала нам нужно уточнить, что мы подразумеваем под управлением при обсуждении моторных приводов:
Управлять или не управлять
Представьте, что вы выгуливаете свою собаку Фидо в парке.
У вас есть поводок, привязанный к Фидо, так что он может шнырять, как хочет, на своем поводке. При этом он будет следовать примерно по тому же маршруту, что и вы. Вы можете подумать, что вашей собаке меньше 9 лет.0003 контроль, верно? Ну, не так уж и много. Этот сценарий будет называться Scalar Control в домене моторных приводов.
Скалярное управление означает, что вы не управляете двигателем точно, но имеете довольно хорошее представление о том, что он делает. Инвертор снабжает электродвигатель напряжением и частотой, и двигатель будет реагировать на этот вход так же, как Фидо на поводке.
Теперь давайте приклеим Fido к скейтборду и заменим поводок на стальной стержень.
Теперь Фидо будет перемещать ровно на , как вы хотите, дюйм за дюймом. Это Vector C , управление . Для моторного привода это означает, что контроллер знает положение ротора в любое время и будет создавать новое магнитное поле, толкающее ротор в нужном направлении несколько сотен (или тысяч) раз в секунду. Скалярное управление, с другой стороны, не имеет представления о положении ротора и только предоставляет двигателю заданное значение скорости, которому двигатель должен следовать настолько хорошо, насколько это возможно, с учетом колебаний нагрузки и других возмущений.
Итак, теперь, когда мы прояснили эту часть, мы собираемся объяснить, как именно и что делает Vector Control.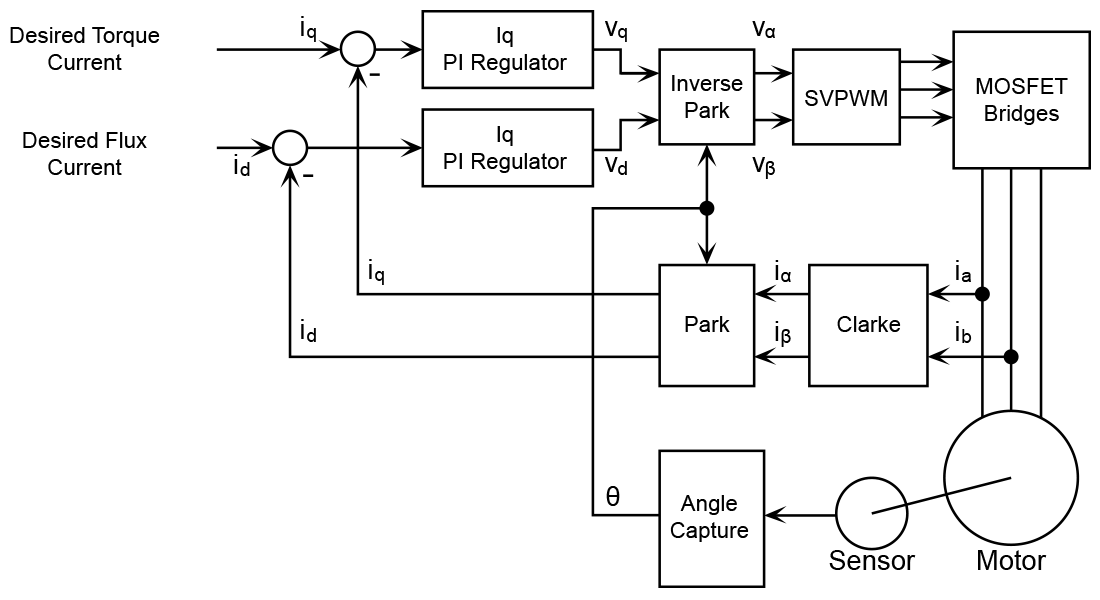
Выявление магнитного поля ротора
Наиболее важной частью векторного управления является определение положения ротора. Под положением я подразумеваю не то, что ротор физически расположен внутри статора, а то, в каком направлении направлено магнитное поле ротора. Видите ли, когда асинхронная машина (АД) намагничена, в роторе возникают индуцированные (doh) напряжения и токи, которые создают магнитные поля. Суммируя все магнитные поля тока, будет NET поле, указывающее в заданном направлении. Это направление важно, так как оно определяет, где инвертор должен размещать магнитное поле статора , чтобы еще больше толкать ротор.
Для синхронных машин с постоянными магнитами (СДПМ) магнитное поле в большей или меньшей степени определяется магнитами ротора и остается постоянным большую часть времени (ослабление поля я объясню в другой раз). Тем не менее, его необходимо определить, и это выполняется одинаково как для асинхронных машин, так и для СДПМ.
Фактическое направление магнитного поля определяется электродвижущей силой двигателя (ЭДС), которая индуцируется в обмотках статора полем ротора.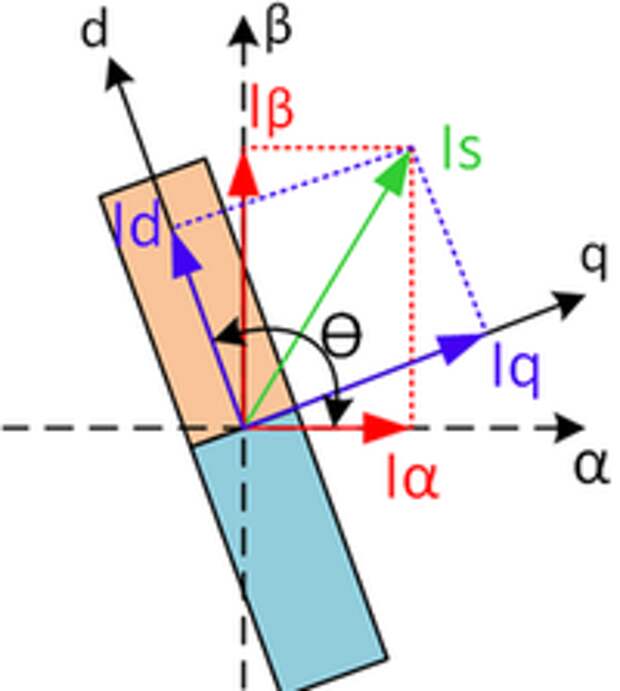 Эта ЭДС будет вести себя как источник напряжения, подключенный последовательно с сопротивлением ротора/индуктивностью рассеяния и параллельно с индуктивностью намагничивания. Если известны параметры двигателя (сопротивление статора/ротора и индуктивность намагничивания), можно оценить значение ЭДС. Это значение является вектором, то есть имеет величину и (*фанфары*) направление , указывающее в ту же сторону, что и чистое магнитное поле ротора.
Эта ЭДС будет вести себя как источник напряжения, подключенный последовательно с сопротивлением ротора/индуктивностью рассеяния и параллельно с индуктивностью намагничивания. Если известны параметры двигателя (сопротивление статора/ротора и индуктивность намагничивания), можно оценить значение ЭДС. Это значение является вектором, то есть имеет величину и (*фанфары*) направление , указывающее в ту же сторону, что и чистое магнитное поле ротора.
Это направление используется, когда контроллер собирается отображать магнитное поле в статоре. Поле статора предназначено для притяжения ротора так же, как обычные магниты притягивают друг друга. Также возможно оттолкнуть ротор, но в этом случае вместо этого магнитное поле используется позади ротора, преследуя его примерно так же, как собака гоняется за своим хвостом.
Обратите внимание, что приведенное выше описание не полностью охватывает науку определения направления поля ротора. Дальнейшие методы будут подробно описаны в отдельной статье.
Оптимальный угол между магнитными полями статора и ротора
Когда магнитное поле ротора определено, пришло время решить, где приложить наше собственное магнитное поле, чтобы далее двигать ротор в нужном направлении.
Допустим, поле ротора расположено под углом 90 градусов. Это означает, что северный полюс направлен прямо вверх (для простоты в двухполюсной машине).
Теперь, где мы должны поместить поле статора, чтобы подтолкнуть ротор в нужном направлении?
Основная цель — создать крутящий момент, поэтому мы хотим разместить поле статора в направлении, при котором я получаю наибольшее приложение крутящего момента к ротору. Я также не хочу, чтобы платили силы тока больше, чем мне абсолютно необходимо. Ток является ограниченным ресурсом, поскольку цены на компоненты инвертора основаны на их номинальном токе.
Итак, получается, что наибольший крутящий момент на ампер достигается, когда магнитное поле статора ориентировано перпендикулярно ротору. В нашем случае либо на 180, либо на 0 градусов, в зависимости от того, в каком направлении вы хотите двигать ротор.
В нашем случае либо на 180, либо на 0 градусов, в зависимости от того, в каком направлении вы хотите двигать ротор.
Вполне возможно выровнять поле статора, например, всего на 10 градусов от поля ротора, но создаваемый крутящий момент будет намного ниже, а ток почти такой же. Не очень хорошая сделка, так что давайте придерживаться разделения на 90 градусов между двумя полями.
Рабочий процесс векторного управления
Частью векторного управления управления обычно является ПИ- или ПИД-регулятор, который управляет двумя основными параметрами:
Крутящий момент, указанный как сумма активный ток
Магнитное поле (поток), заданное как реактивный ток.
Хотя в двигатель втекают три тока, их можно разложить на два разных ортогональных тока точно так же, как полная мощность делится на активную и реактивную мощность.
Это преобразование трехфазных токов в ток, создающий крутящий момент, и ток, создающий поток, известно как преобразование Кларка и выглядит следующим образом:
\begin{equation}
i_{\alpha} = \frac{3}{2} \cdot i_{U}
\end{equation}
\begin{equation}
i_{\beta} = \frac {\sqrt{3}}{2} \cdot i_{V} — \frac{\sqrt{3}}{2} \cdot i_{W}
\end{equation}
, где \( i_{U} \), \( i_{V}\) и \( i_{W}\) представляют собой трехфазные токи, выходящие из инвертора, а \( i_{\alpha}\) и \( i_{\beta}\) представляют два «новых» тока для крутящего момента и потока соответственно.
Хотя это большой шаг вперед в управлении крутящим моментом и магнитным потоком, остается еще одна проблема. Видите ли, токи по-прежнему синусоидальны, и ПИ (или ПИД) регулятору будет очень трудно контролировать эти значения; они постоянно меняются. Для работы регулятору требуется вход в установившемся режиме.
Но подождите. Контроллер уже знает положение ротора, верно? Используя эту информацию, можно «отменить» синусоидальные волны, используя несколько триггерных функций для компенсации синусоидального движения токов.
Этот трюк называется Park-transformation , и, по сути, позволяет контроллеру наблюдать за ротором с точки зрения устойчивого состояния, вместо того, чтобы наблюдать за его вращением с точки зрения статора. Терминология этого «движение от стационарная система отсчета в вращающуюся систему отсчета» .
Это можно сравнить с попыткой зафиксировать лошадь на карусели, когда она вращается, а вы стоите на земле рядом с ней. Было бы намного проще просто запрыгнуть на карусель и прицепиться к лошади, стоя перед ней, не так ли?
Было бы намного проще просто запрыгнуть на карусель и прицепиться к лошади, стоя перед ней, не так ли?
Преобразование Парка преобразует два переменных тока в устойчивые постоянные токи и упрощает управление контроллером машина с помощью обычного ПИ- или ПИД-регулятора.
Когда выход готов, преобразование Парка и Кларка можно обратить, прежде чем подавать на двигатель новые токи с помощью модулятора напряжения (см. собственную статью о широтно-импульсной модуляции с пространственным вектором).
\begin{equation}
i_{q} = -i_{\alpha} \cdot \sin{\Theta_{d}}+ i_{\beta} \cdot \cos{\Theta_{d}}
\end {уравнение}
\begin{уравнение}
i_{d} = i_{\alpha} \cdot \cos{\Theta_{d}}+ i_{\beta} \cdot \sin{\Theta_{d}}
\end{equation}
где \(i_{q}\) и \(i_{d} \) представляют собой постоянные токи, создающие крутящий момент и поле, а \(\Theta\) — угол ротора.
Весь рабочий процесс показан ниже.
Векторное управление — это очень распространенный способ управления электродвигателем с помощью измерений тока и напряжения. Эти измерения используются для определения положения ротора и расчета нового набора трехфазных напряжений, которые подаются на клеммы двигателя. Это, в свою очередь, создаст новое магнитное поле, которое немного сдвинет ротор, прежде чем будет проведено новое измерение, и процесс повторится.
Эти измерения используются для определения положения ротора и расчета нового набора трехфазных напряжений, которые подаются на клеммы двигателя. Это, в свою очередь, создаст новое магнитное поле, которое немного сдвинет ротор, прежде чем будет проведено новое измерение, и процесс повторится.
Реактивный ток, используемый для создания магнитного поля (нет данных в машинах с ПМ)
Активный ток, используемый для создания крутящего момента для вращения ротора
Реактивный ток почти постоянен и контролируется регулятором потока. Обычно он применяется перед любым током, создающим крутящий момент, при запуске машины.
Однако, если требуется ослабление поля, реактивный ток уменьшается.
Реактивный ток составляет от 25% до 35% номинального тока машины. Следовательно, даже при отсутствии скорости или крутящего момента в машине всегда будет присутствовать такое количество тока.
 Поскольку поток потока является почти чисто реактивным, его невозможно измерить на шине постоянного тока или на стороне линии инвертора. Он все еще существует в переключателях (транзисторах), но компенсируется на стороне постоянного тока.
Поскольку поток потока является почти чисто реактивным, его невозможно измерить на шине постоянного тока или на стороне линии инвертора. Он все еще существует в переключателях (транзисторах), но компенсируется на стороне постоянного тока.
Активный ток используется для управления скоростью, мощностью или крутящим моментом. Важно понимать, что независимо от того, находится ли задание в скорости или в мощности, по-прежнему контролируется крутящий момент . Например. если скорость слишком низкая: примените больший крутящий момент.
Крутящий момент напрямую зависит от величины активного тока. Что снова определяется напряжением:
Более высокое напряжение -> больший ток -> больший крутящий момент -> повышенная скорость и/или мощность.При управлении машиной привод должен знать, где находится ротор. То есть, в каком направлении «указывает» поток в роторе. Это должно быть оценено с помощью математических моделей и измерений напряжения и тока.
Он также может быть задан кодировщиком.Преобразователь частоты управляет двигателем, применяя вектор напряжения относительно вектора потока ротора. Если представить машину в виде часов, можно представить, что поток ротора указывает на положение «1 час». Затем преобразователь частоты должен подать вектор напряжения на 12 часов, чтобы создать магнитное поле в статоре, чтобы «преследовать» ротор. (В практических приводах вектор статора обычно расположен 90° впереди или позади вектора ротора, так как это дает максимальный крутящий момент на ампер)
 Поскольку поток потока является почти чисто реактивным, его невозможно измерить на шине постоянного тока или на стороне линии инвертора. Он все еще существует в переключателях (транзисторах), но компенсируется на стороне постоянного тока.
Поскольку поток потока является почти чисто реактивным, его невозможно измерить на шине постоянного тока или на стороне линии инвертора. Он все еще существует в переключателях (транзисторах), но компенсируется на стороне постоянного тока. Он также может быть задан кодировщиком.
Он также может быть задан кодировщиком.Описанная выше процедура повторяется снова и снова очень быстро:
Измерение тока и напряжения на основе вышеуказанных измерений и модели напряжения и/или тока.
Преобразование измеренных значений в реактивную/активную часть в кадре постоянного тока (преобразование Кларка/парка)
Рассчитать, в каком положении применить вектор напряжения статора (90° от ротора)
Применить векторы напряжения (с учетом того, что положение ротора изменилось с момента шага 1).
Пуск свыше
Выходное напряжение и частота должны изменяться пропорционально. Величина потока в машине определяется соотношением между напряжением и частотой (U/f). Поскольку мы хотим поддерживать постоянный поток, необходимо линейно изменять напряжение и частоту, т. е. 30% скорости = 30% частоты = 30% напряжения. Причина такой зависимости в том, что реактивное сопротивление индуктивности обмотки зависит от частоты; \( X_L = 2 π f \)
Поскольку напряжение в двигателе очень низкое при низких скоростях (ниже 3 Гц), становится все труднее получать правильные измерения напряжения из-за помех и резистивных падений напряжения в кабелях и обмотках. Это затрудняет управление двигателем, и вместо него требуется энкодер. С помощью энкодера преобразователь частоты может точно управлять двигателем даже при частоте 0 Гц (например, удерживая неподвижно подвешенный груз в лебедке).
Векторный двигатель и векторное управление | Toshiba Electronic Devices & Storage Corporation
Эта страница частично использует JavaScript. Эта страница может работать неправильно, если эти функции не поддерживаются вашим браузером или настройка отключена.
Эта страница может работать неправильно, если эти функции не поддерживаются вашим браузером или настройка отключена.
Пожалуйста, ищите необходимую информацию на следующих страницах:
Технология векторного управления является одной из важнейших технологий для эффективного привода двигателя с низким энергопотреблением. Мы расскажем о векторном движке (VE), который может снизить нагрузку на программное обеспечение во время векторного управления.
В последние годы векторное управление стало использоваться для управления двигателями, такими как кондиционеры. Это передовая технология, которая может эффективно управлять вращением двигателя от низкой скорости до высокой скорости. Не будет преувеличением сказать, что плавное управление двигателем на низкой скорости было бы невозможно без использования векторного управления. Поскольку в векторном контроле используется очень сложный процесс, для его понимания требуются математические знания. Однако мы постараемся объяснить векторный контроль, используя как можно меньше математических выражений.
Здесь мы будем использовать 3-фазный двигатель в качестве примера.
Давайте начнем с объяснения
трехфазный двигатель и его драйвер.
3-фазный двигатель и драйвер
Трехфазные сигналы переменного тока состоят из трех синусоид, сдвинутых друг относительно друга на 120 градусов. Трехфазный двигатель подает эти три переменных тока на три клеммы соответственно для вращения ротора. Число оборотов двигателя регулируется частотой переменного тока. То есть частоту переменного тока нужно понизить, чтобы двигатель вращался медленно. Точно так же частота должна быть выше, чтобы двигатель вращался с высокой скоростью.
Для подачи трехфазного напряжения (или тока) на этот трехфазный двигатель используется микросхема, называемая драйвером двигателя. В случае векторного управления базовая схема драйвера двигателя состоит из 6 транзисторов (параллельно транзистору подключен диод). Управление включением и выключением 6 транзисторов имеет 6 входных сигналов u, v, w, x, y и z соответственно. И есть 3 выходные клеммы U, V и W для привода трехфазного двигателя постоянного тока. Кроме того, имеется 3 выходных порта клеммы a, b и c для контроля каждого управляющего тока выходных портов U, V и W.
Управление включением и выключением 6 транзисторов имеет 6 входных сигналов u, v, w, x, y и z соответственно. И есть 3 выходные клеммы U, V и W для привода трехфазного двигателя постоянного тока. Кроме того, имеется 3 выходных порта клеммы a, b и c для контроля каждого управляющего тока выходных портов U, V и W.
Что такое векторное управление?
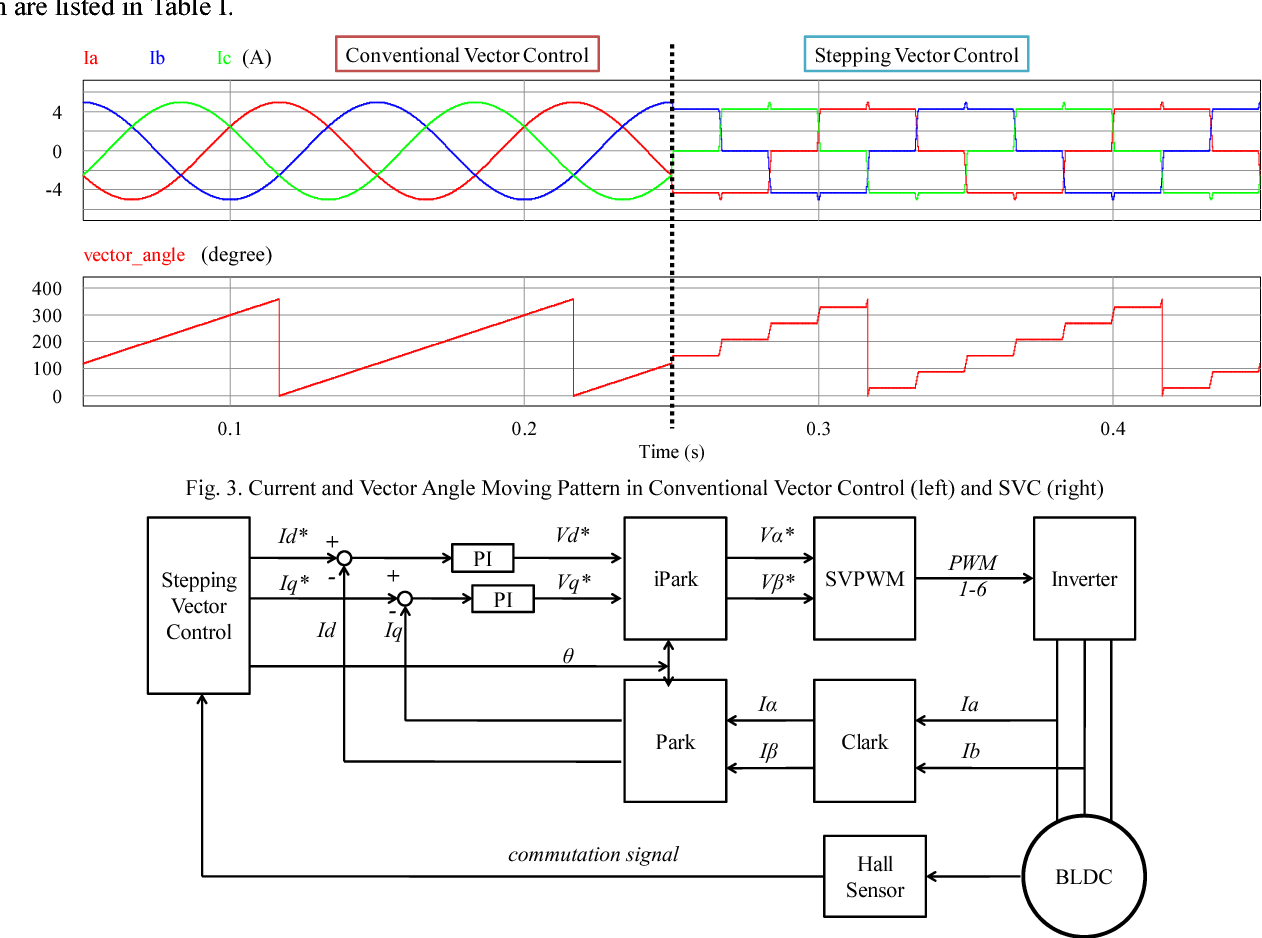
На следующем рисунке показано полное изображение векторного управления. Во-первых, векторное управление начинается с контроля форм сигналов U, V и W, которые приводят в движение двигатель. Сигналами для монитора являются выходы a, b и c драйвера двигателя. Поскольку амплитуда сигнала a, b и c очень мала, он усиливается усилителем и подается на АЦП. После преобразования трехфазных сигналов a, b и c в цифровые значения тока Iu, Iv и Iw с помощью АЦП, они преобразуются в значения тока двух фаз Iα и Iβ. Затем эти двухфазные токи преобразуются в токи Id и Iq путем преобразования координат из стационарных координат в координаты вращения.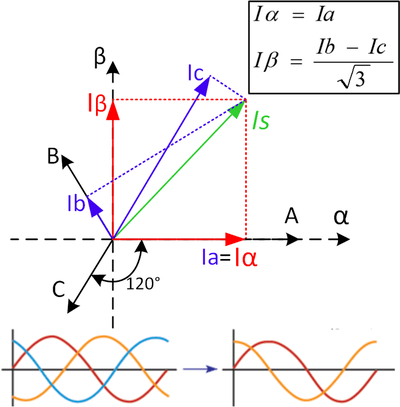 Цель векторного управления состоит в том, чтобы совместить эти Id и Iq с заранее фиксированными идеальными значениями Idref и Iqref соответственно. Id и Iq контролировали ток двигателя, и, поскольку они представляют собой значения, которые были преобразованы из него, они отошли от идеальных значений. Затем, чтобы избавиться от разрыва, ПИ-управление исправляет. Значение компенсации задается не током, а значением напряжения Vd и Vq. Затем выполняется обратное преобразование координат в стационарные координаты из вращающихся координат для получения Vα и Vβ. Хотя 3-фазные входные сигналы u, v и w драйвера двигателя получаются из напряжения этих 2 фаз Vα и Vβ, для их получения в это время выполняется модуляция пространственного вектора вместо простой 2-фазной 3-фазной преобразование. Входные сигналы u, v и w привода двигателя и сигналы x, y и z этих отрицательных фаз получаются посредством этого преобразования. И сигналы U, V и W передаются двигателю. Выше был выполнен 1 цикл борьбы с переносчиками.
Цель векторного управления состоит в том, чтобы совместить эти Id и Iq с заранее фиксированными идеальными значениями Idref и Iqref соответственно. Id и Iq контролировали ток двигателя, и, поскольку они представляют собой значения, которые были преобразованы из него, они отошли от идеальных значений. Затем, чтобы избавиться от разрыва, ПИ-управление исправляет. Значение компенсации задается не током, а значением напряжения Vd и Vq. Затем выполняется обратное преобразование координат в стационарные координаты из вращающихся координат для получения Vα и Vβ. Хотя 3-фазные входные сигналы u, v и w драйвера двигателя получаются из напряжения этих 2 фаз Vα и Vβ, для их получения в это время выполняется модуляция пространственного вектора вместо простой 2-фазной 3-фазной преобразование. Входные сигналы u, v и w привода двигателя и сигналы x, y и z этих отрицательных фаз получаются посредством этого преобразования. И сигналы U, V и W передаются двигателю. Выше был выполнен 1 цикл борьбы с переносчиками. Этот цикл повторяется, и становится возможным состояние вращения идеала.
Этот цикл повторяется, и становится возможным состояние вращения идеала.
Здесь мы будем использовать 3-фазный двигатель в качестве примера.
Давайте начнем с объяснения
трехфазный двигатель и его драйвер.
(1)Контроль тока возбуждения U, V, W и преобразования в 2 фазы из 3 фаз
Три управляющих тока U, V и W контролируются через клеммы монитора a, b и c. Однако, поскольку значения этих контрольных сигналов очень малы, усиление сигнала выполняется с помощью усилителя, и они вводятся в аналого-цифровой преобразователь и преобразуются в цифровые значения. Измененные цифровые значения тока Iu, Iv и Iw используются для последующего расчета. Теперь, как правило, трудно обрабатывать три сигнала одновременно. Именно потому, что три сигнала меняются при определенном взаимном отношении, необходим расчет в трехмерном пространстве. Таким образом, чтобы упростить этот расчет, 3 фазы заменены на 2 фазы. В этом преобразовании будет использовано свойство идеального трехфазного переменного тока, когда сумма трех синусоидальных волн равна нулю. то есть
Таким образом, чтобы упростить этот расчет, 3 фазы заменены на 2 фазы. В этом преобразовании будет использовано свойство идеального трехфазного переменного тока, когда сумма трех синусоидальных волн равна нулю. то есть
Iu + Iv + Iw = 0
Хотя 3-фазы превращаются в 2-фазы на основании этого условия, предполагается, что две оси после перехода в 2-фазы пересекаются непосредственно друг с другом (предполагается, что они пересекаются под углом 90°). градусов). Такое преобразование называется преобразованием Кларка.
Преобразование Кларка
Если предположить, что токи 3-х фаз равны Iu, Iv и Iw, а токи после 2-фазного преобразования принять равными Iα и Iβ, результат будет
Иу + Ив + Ив = 0
Iα= Iu
Iβ= (Iu + 2Iv) / √3
Приведенная выше формула представляет собой преобразование из 3 фаз в 2 фазы, что является первым преобразованием в векторном контроле.
(2)Вращающаяся ось преобразования координат
Вторым преобразованием векторного управления является преобразование координат из стационарных координат во вращающиеся координаты.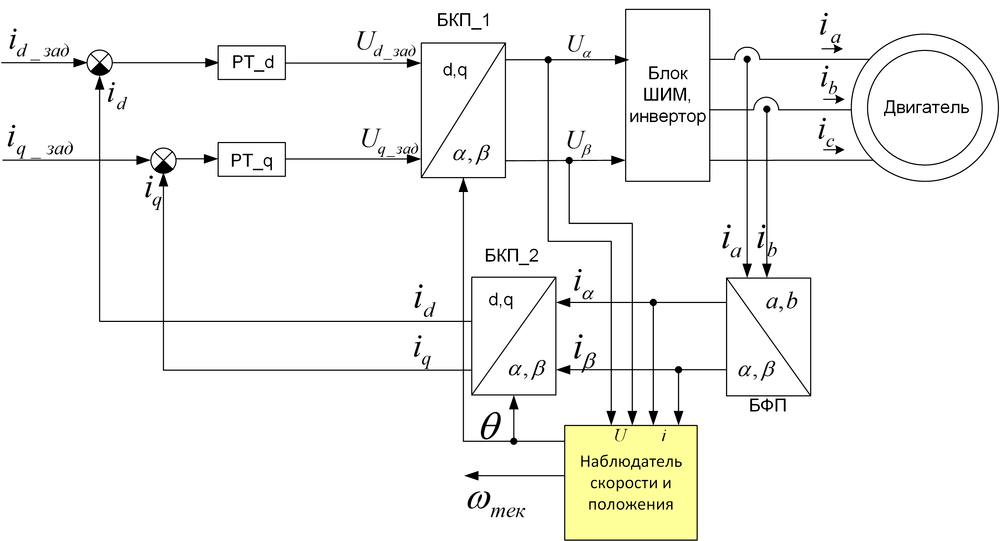 На самом деле значение тока, преобразованное в 2 фазы из 3 фаз, представляет собой значение тока, которое протекает через ротор и вращается вместе с ним. Глядя на двигатель снаружи, ротор крутится по кругу. Однако, если вы можете ехать на роторе, кажется, что ротор остановился. И вам кажется, что все вокруг вертится и вертится. То есть по координате, вращение которой совпадает с вращением ротора, двухфазный ток на роторе выглядит остановленным. Токи, кажется, остаются неподвижными, их можно рассматривать как постоянные токи. Поэтому расчет значительно упростится, если выполнить преобразование координат из стационарных координат в вращающиеся координаты. Преобразование во вращающиеся координаты из стационарных координат называется преобразованием Парка.
На самом деле значение тока, преобразованное в 2 фазы из 3 фаз, представляет собой значение тока, которое протекает через ротор и вращается вместе с ним. Глядя на двигатель снаружи, ротор крутится по кругу. Однако, если вы можете ехать на роторе, кажется, что ротор остановился. И вам кажется, что все вокруг вертится и вертится. То есть по координате, вращение которой совпадает с вращением ротора, двухфазный ток на роторе выглядит остановленным. Токи, кажется, остаются неподвижными, их можно рассматривать как постоянные токи. Поэтому расчет значительно упростится, если выполнить преобразование координат из стационарных координат в вращающиеся координаты. Преобразование во вращающиеся координаты из стационарных координат называется преобразованием Парка.
Преобразование парковки
Если принять токи в стационарных координатах за Iα и Iβ, во вращающихся координатах принять за Id, а Iq и угол поворота принять за θ, тогда результатом будет
Id = Iα・cosθ+ Iβ・sinθ
Iq = -Iα・sinθ+ Iβ・cosθ
Кстати, для перехода из стационарных во вращающиеся координаты требуется значение угла поворота θ ротора. Это означает, что преобразование во вращающиеся координаты не может быть выполнено без данных о том, сколько раз вращался ротор. На самом деле информацию об угле поворота можно получить и другими способами. Например, угол поворота ротора и скорость вращения можно узнать с помощью инкрементного энкодера и так далее, которые являются датчиками вращения.
Это означает, что преобразование во вращающиеся координаты не может быть выполнено без данных о том, сколько раз вращался ротор. На самом деле информацию об угле поворота можно получить и другими способами. Например, угол поворота ротора и скорость вращения можно узнать с помощью инкрементного энкодера и так далее, которые являются датчиками вращения.
Будем исходить из того, что угол поворота известен.
(3) ПИ-регулирование
Половина процесса борьбы с переносчиками завершена. В этот момент векторное управление проверит, являются ли значения двухфазных токов Iq и Id больше или меньше идеальных значений. Если результат больше идеального значения, векторное управление уменьшит ток. Если меньше, это увеличит ток. Обычно в этой части применяется ПИ-управление. ПИ-регулирование выполняет П-регулирование (пропорциональное регулирование) и И-регулирование (интегральное регулирование) параллельно. П-управление выполняет управление усилением в соответствии с разницей идеального значения и фактического измерения. Управление I выполняет управление усилением в соответствии со значением интегрирования разности (идеальное предустановленное значение Iq и Id устанавливается равным Iqref и Idref). Хотя входы ПИ-регулятора представляют собой текущие значения 2 фаз, выходы представляют собой значения напряжения 2 фаз. Причина, по которой выходы представляют собой значения напряжения, а не значения тока, заключается в том, что входные сигналы драйвера двигателя, которые являются последними выходами векторного управления, являются значениями не тока, а напряжения. Затем значения двухфазного напряжения Vq и Vd, полученные с помощью ПИ-управления, возвращаются к стационарным координатам из вращающихся координат. Для этого теперь сойдем с вращающейся координаты и значение напряжения, рассчитанное во вращающейся системе координат, пересчитаем в стационарной системе координат. Ранее было выполнено преобразование из стационарной системы координат во вращающуюся систему координат, а в этот раз выполняется обратное преобразование метода.
П-управление выполняет управление усилением в соответствии с разницей идеального значения и фактического измерения. Управление I выполняет управление усилением в соответствии со значением интегрирования разности (идеальное предустановленное значение Iq и Id устанавливается равным Iqref и Idref). Хотя входы ПИ-регулятора представляют собой текущие значения 2 фаз, выходы представляют собой значения напряжения 2 фаз. Причина, по которой выходы представляют собой значения напряжения, а не значения тока, заключается в том, что входные сигналы драйвера двигателя, которые являются последними выходами векторного управления, являются значениями не тока, а напряжения. Затем значения двухфазного напряжения Vq и Vd, полученные с помощью ПИ-управления, возвращаются к стационарным координатам из вращающихся координат. Для этого теперь сойдем с вращающейся координаты и значение напряжения, рассчитанное во вращающейся системе координат, пересчитаем в стационарной системе координат. Ранее было выполнено преобразование из стационарной системы координат во вращающуюся систему координат, а в этот раз выполняется обратное преобразование метода. Это преобразование называется обратным преобразованием Парка. В этой точке требуется угол поворота. Она получается уже при переходе от стационарных координат к вращающимся координатам.
Это преобразование называется обратным преобразованием Парка. В этой точке требуется угол поворота. Она получается уже при переходе от стационарных координат к вращающимся координатам.
Обратное преобразование парковки
Vα= Vd・cosθ-Vq・sinθ
Vβ= Vd・sinθ+Vq・cosθ
(4) Модуляция пространственного вектора
Что ж, борьба с переносчиками сейчас в завершающей стадии. Последним преобразованием является модуляция пространственного вектора.
Давайте посмотрим, что за преобразование пространства
векторная модуляция есть.
Цель не за горами,
но это самая сложная часть.
Выполняется обратное преобразование 2-фазного напряжения в 3-фазное с помощью модуляции пространственного вектора. В результате получаются 3 фазы входного сигнала двигателя u, v и w и обратнофазные сигналы x, y и z. Трехфазный переменный ток, управляющий двигателем, состоит из трех синусоид, сдвинутых друг относительно друга на 120 градусов. Затем сначала подготавливаются три оси, сдвинутые всего на 120 градусов. Используя трехмерную векторную нотацию, каждая ось устанавливается в (100), (010) и (001). Далее каждая ось продлевается в встречном направлении от начальной точки (начала координат). Затем расширение (100) входит в середину (010) и (001), и эта расширенная ось устанавливается на вектор (011). Аналогично, что касается расширения (010), расширение устанавливается равным (101), а расширение (001) устанавливается равным (110). Таким образом, получается шесть квадрантов. Здесь каждый квадрант называется сектором.
Затем сначала подготавливаются три оси, сдвинутые всего на 120 градусов. Используя трехмерную векторную нотацию, каждая ось устанавливается в (100), (010) и (001). Далее каждая ось продлевается в встречном направлении от начальной точки (начала координат). Затем расширение (100) входит в середину (010) и (001), и эта расширенная ось устанавливается на вектор (011). Аналогично, что касается расширения (010), расширение устанавливается равным (101), а расширение (001) устанавливается равным (110). Таким образом, получается шесть квадрантов. Здесь каждый квадрант называется сектором.
Затем в это пространство помещаются 2-фазные напряжения Vα и Vβ, и путем векторной композиции Vα и Vβ синтезируется вектор V. Поскольку синтетическое напряжение V вращается вместе с ротором, оно перемещается от сектора к сектору по порядку.
Позвольте мне объяснить шесть осей, разделяющих пространство.
Теперь это V разлагается на вектор двух осей (100) и (110), когда сектор 0 имеет вектор напряжения V.
Если составляющая (100) устанавливается равной t1, а составляющая (110) устанавливается равной t2, будет получена нижняя левая цифра.
Фактически, 3 фазы вектора (100), (010) и (001) соответствуют (u,v, и w) привода двигателя. Поскольку (100) есть u, а (110) есть u и v, следующие выражения, …
u=t1+t2
v=t2
. Что ж становится? Всегда w=0, так как ось сектора 0 равна (100) и (110). Однако с учетом окончательной формы сигнала w определяется следующим образом.
Во-первых, обратите внимание, что на рисунке из шести секторов нет осей для векторов (000) и (111). Поскольку (000) равно u=v=w=0, драйвер не может подавать ток на двигатель, поскольку все транзисторы со стороны VDC драйвера находятся в выключенном состоянии. С другой стороны, (111) равно u=v=w=1. Вход реверсирования x=y=z=0 в это время. То есть, поскольку все 3 транзистора рядом с GND отключаются, драйвер также не может подавать ток. Следовательно, (000) (111) — это операции, «которые ничто не совершает по отношению к двигателю».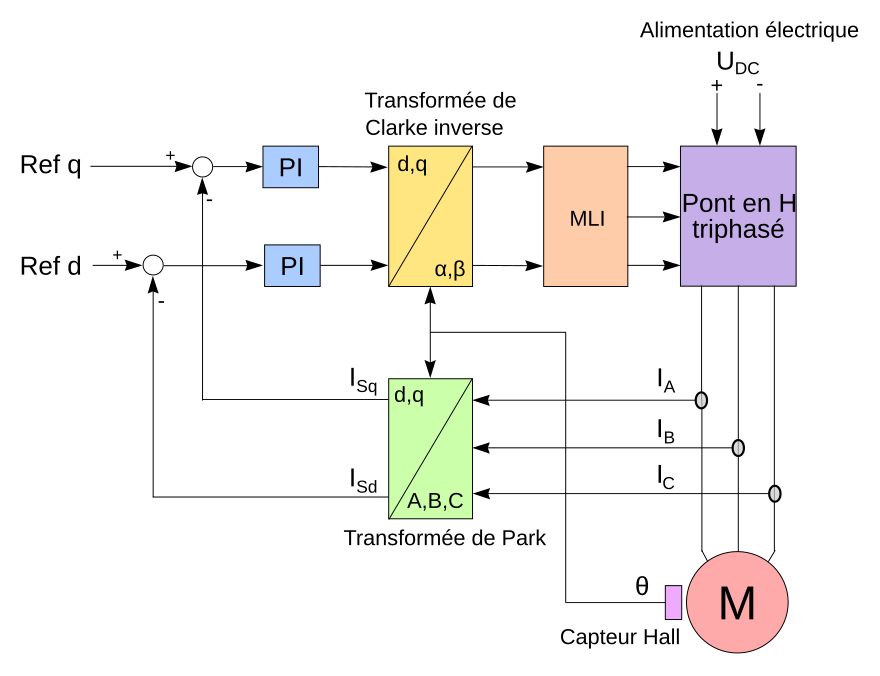 Кроме того, для того, чтобы сделать сигнал, вводимый в возбудитель, с модуляцией пространственного вектора, определяется определенный фиксированный цикл T. Хотя вектор напряжения V вращается вместе с ротором, цикл T очень короткий, и считается, что в течение этого цикла вектор напряжения V стоит на месте.
Кроме того, для того, чтобы сделать сигнал, вводимый в возбудитель, с модуляцией пространственного вектора, определяется определенный фиксированный цикл T. Хотя вектор напряжения V вращается вместе с ротором, цикл T очень короткий, и считается, что в течение этого цикла вектор напряжения V стоит на месте.
Теперь вектор напряжения V в секторе 0 был разложен на t1 и t2.
Цикл T определяется как…
T=t1+t2+t3
Время t3 — это «время ничего не делать» в секторе 0. (uvw) устанавливается в (000) или (111) в это время. Таким образом, формы волн u, v и w, которые были рассчитаны, показаны на следующем рисунке. Поскольку формы сигналов собраны с учетом волновой симметрии, t1 и t2 рассчитываются с точностью до половины, а t3 рассчитывается с точностью до одной четверти. В течение всего 1 цикла время, когда u, v и w становятся равными 1, выглядит следующим образом.
и=т1+т2+т3/2
v=t2+t3/2
w=t3/2
Предложение t3/2 для u, v и w указывает время, в течение которого u=v=w=1, и это время, когда ничего не нужно делать. С другой стороны, есть также время t3/2, в котором u=v=w=0 и с двигателем ничего не делается. Итого, t3 застрахован на время от ничегонеделания.
С другой стороны, есть также время t3/2, в котором u=v=w=0 и с двигателем ничего не делается. Итого, t3 застрахован на время от ничегонеделания.
Теперь вектор напряжения V (2 фазы) был наконец преобразован в 3-фазные сигналы (u, v, w) посредством модуляции пространственного вектора. На этом модуляция пространственного вектора в один вектор напряжения завершена. Давайте еще раз повернем вектор напряжения V. Как показано на следующем рисунке, когда вектор напряжения V вращается по каждому сектору по порядку, значения t1 и t2 для u, v и t3 для w изменяются. Кроме того, x, y и z получаются как сигналы обращения u, v и w соответственно.
Наконец, формы сигналов u, v, w, x, y и z были получены путем преобразования модуляции пространственного вектора. Теперь весь векторный контроль был в поле зрения. Вы можете понять, как векторное управление управляет двигателем на всех этапах сложных процессов.
Это так сложно, не правда ли? Так как микроконтроллеры для
появилось управление двигателем, векторное управление
может выполняться легко и эффективно.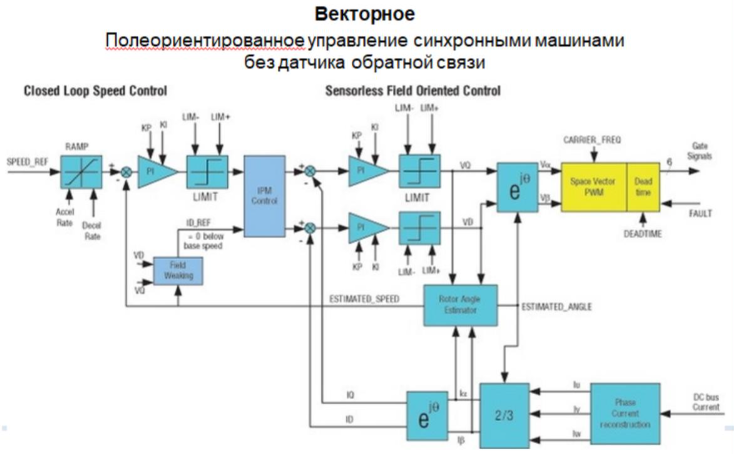
(5)Синусоида
Существенный ток U, V и W становится u-v, v-w и w-u соответственно. Если эти токи изобразить на графике угла поворота ротора, то получатся синусоидальные формы 3-х фаз, при этом фазы отличаются друг от друга на 120 градусов.
Теперь мы знаем, что модуляция пространственного вектора является эффективным методом создания сигналов u, v и w, которые управляют транзисторами драйвера двигателя. Входные сигналы U, V и W 3-фазного двигателя могут быть отображены как хорошие синусоидальные формы с помощью пространственно-векторной модуляции.
Что делает векторный движок?
Теперь мы поняли, что такое борьба с переносчиками. Далее объясняется, что делает векторный движок. Сам векторный движок — это аппаратное обеспечение, которое выполняет часть требуемой работы посредством векторного управления, а не центрального процессора.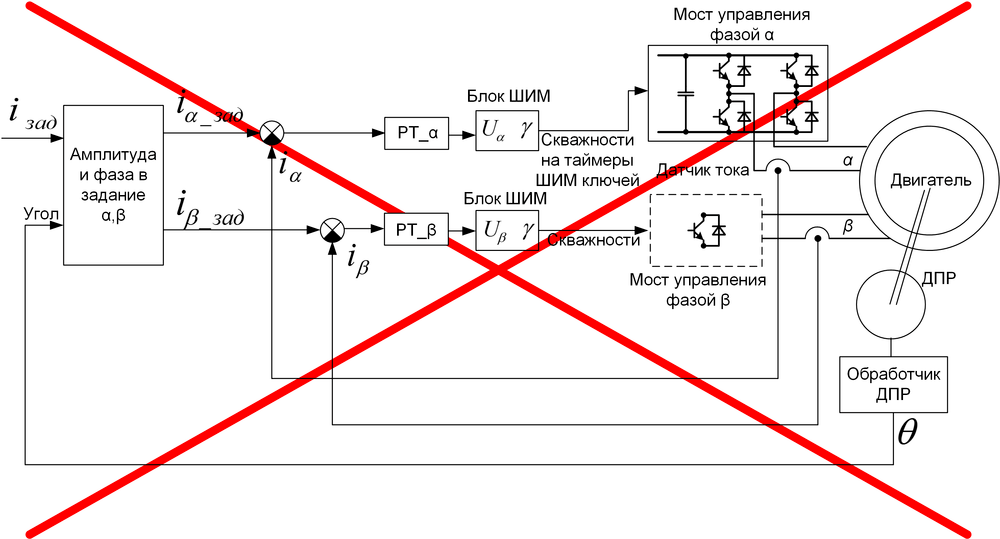 Тем не менее, он может играть большую роль в более крупной системе «векторного управления», встраивая это оборудование в микроконтроллер. Он блокирует и управляет векторным механизмом (VE), схемой управления двигателем (PMD) и аналого-цифровым преобразователем (ADC), которые необходимы для периферийных цепей векторного управления без передачи ЦП. То есть векторный механизм автоматически выполняет доставку данных каждой периферийной схемы и обрабатывает их, автоматически оценивая время запуска каждой периферийной схемы. Большая заслуга ЦП в том, что работа по обработке векторного управления может быть резко сокращена. Давайте найдем во всей фигуре управления вектором, какая часть отвечает за каждую работу.
Тем не менее, он может играть большую роль в более крупной системе «векторного управления», встраивая это оборудование в микроконтроллер. Он блокирует и управляет векторным механизмом (VE), схемой управления двигателем (PMD) и аналого-цифровым преобразователем (ADC), которые необходимы для периферийных цепей векторного управления без передачи ЦП. То есть векторный механизм автоматически выполняет доставку данных каждой периферийной схемы и обрабатывает их, автоматически оценивая время запуска каждой периферийной схемы. Большая заслуга ЦП в том, что работа по обработке векторного управления может быть резко сокращена. Давайте найдем во всей фигуре управления вектором, какая часть отвечает за каждую работу.
[1] Целевые текущие значения Iqref и Idref и угол вращения ротора тета устанавливаются для векторного двигателя.
⇒ CPU
[2] Значение фазового выходного напряжения (длительность импульса, эквивалентная выходному напряжению U, V и W) устанавливается на PMD. Вычисляется время начала преобразования АЦП, и время устанавливается на PMD.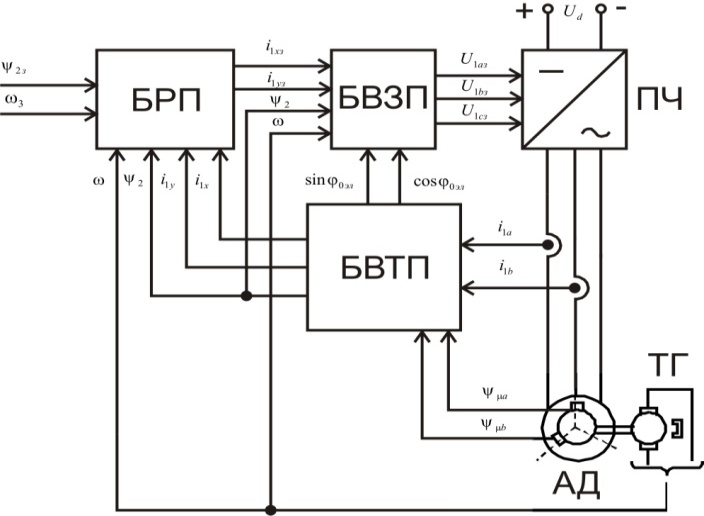
⇒ VE
[3] Схема PMD выводит напряжение (ШИМ), заданное для новых U, V и W, и передает сигнал начала преобразования на АЦП.
⇒ PMD
[4] АЦП передает сигнал окончания векторному механизму после завершения преобразования.
⇒ ADC
[5] Принимается результат преобразования AD, вычисляются ток обратной связи Id и Iq, и требуется прерывание ЦП.
⇒ VE
[6] В ответ на прерывание вычисление угла ротора и новое текущее значение инструкции вычисляются программным обеспечением.
⇒ CPU
Другой — работа самой аппаратной части векторного движка. При векторном управлении необходимо выполнять сложные операции, такие как преобразование стационарных координат, модуляция пространственного вектора, 3-фазное преобразование в 2-фазное и преобразование вращающихся координат. Чтобы выполнять эти сложные операции с помощью ЦП с помощью программного обеспечения, необходимо создать сложную программу. Кроме того, время выполнения ЦП также будет занимать много времени, и будет большой нагрузкой на ЦП различными работами. Тогда какую работу на самом деле выполняет векторный двигатель?
Тогда какую работу на самом деле выполняет векторный двигатель?
- Вычисление синуса/косинуса
- Текущее регулирование (ПИ-управление)
- Стационарное преобразование координат
- Управление пространственным вектором
- 2-фазное преобразование в 3-фазное
- Преобразование координат вращения
Эти шесть работ выполняет векторный движок.
Таким образом, векторный движок аппаратно очень удобен для выполнения векторного управления.
Фу, понял?
Довольно сложное содержание, но если вы хотите знать
подробнее о борьбе с переносчиками,
обратитесь к технической книге.
Toshiba Semiconductor & Storage Product Company
также предлагает семинары по микроконтроллерам. Пожалуйста, примите участие.
Внедрение продукции
Серия TX03 Группа M370 TMPM375FSDMG
Включение оригинального аппаратного обеспечения Toshiba «Vector Engine» позволяет этим микроконтроллерам выполнять базовую обработку (преобразование координат, фазовое преобразование, операцию SIN/COS), необходимую для векторного управления и PI-управления, используемого для текущего управления.