Содержание
12 Тормозная динамика автомобиля и ее значение для безопасности движения. Требования к тормозным системам.
Во
время движения водитель постоянно
изменяет скорость автомобиля в
соответствии с дорожной обстановкой и
должен в любое время быть готовым к
экстренной остановке в случае
необходимости. Для этого на автомобиле
имеются специальные системы, которые
создают большое дополнительное
сопротивление движению автомобиля и
обеспечивают быстрое снижение его
скорости вплоть до полной остановки.
Эти системы называются тормозными.
Современные автомобили оборудуются
четырьмя тормозными системами: рабочей,
запасной, стояночной и вспомогательной.
Основной
тормозной системой является рабочая.
Она предназначена для регулирования
скорости автомобиля в любых условиях
движения. Запасная система используется
в случае отказа рабочей, а стояночная
удерживает неподвижный автомобиль на
месте. Вспомогательная тормозная система
служит для поддержания скорости
автомобиля постоянной в течение
длительного периода времени на спусках
без применения рабочей. На легковых
На легковых
автомобилях и на грузовых малой и средней
грузоподъемности в качестве запасной
тормозной системы используют стояночную,
а в качестве вспомогательной — двигатель.
Грузовые автомобили большой грузоподъемности
и автобусы большой вместимости оснащаются
всеми четырьмя отдельными тормозными
системами.
Для
обеспечения безопасности движения
автомобиля рабочая тормозная система
должна удовлетворять следующим
требованиям:
Время
срабатывания системы должно быть
минимальным, а замедление автомобиля
— максимальным во всех условиях
эксплуатации.Все
колеса автомобиля должны затормаживаться
одновременно и с одинаковой интенсивностью.Тормозные
силы на колесах должны нарастатЛсгджнож
системе не должно быть заеданий и
заклиниваний.Работа
тормозной системы не должна вызывать
потери устойчивости автомобиля.Усилия,
необходимые для приведения системы в
действие и перемещения рабочих органов
управления (педали и рычаги), не должны
превышать физических возможностей
водителя.
Эффективность
системы должна быть постоянной в течение
всего срока службы автомобиля, а
вероятность отказов минимальной.
Рассмотрим силы,
действующие на авто при торможении.
Приняв допущение, что сопротивление
дороги и воздуха отсутствуют а коэф.
учета вращения масс равен 1.
a,
b
и hц
— расстояние от центра тяжести автомобиля
соответственно до передней и задней
осей и до поверхности дороги, м; L
— база автомобиля, м; RxlRX2>
Rz1
RZ2
_
соответственно касательные и вертикальные
реакции дороги на колесах передней и
задней осей, Н; Ри
— сила инерции автомобиля, Н.
При
принятых допущениях согласно условиям
равновесия можно записать:
Fj=Rx1+Rx2
Cост.
Уравнение моментов сил относительно
точек контактов:
Rz1*L-Fj*hц-G*b=0
-Rz2*L-Fj*hц+G*a=0
Из этих уравнений
получим:
Rz1=(G*b+Fj*hц)/L
Rz2=(G*a-Fj*hц)/L
Как
видно из полученных выражений, при
торможении автомобиля вертикальная
реакция на передних колесах Rzl
растет, а на задних Rz2
–уменьшается.
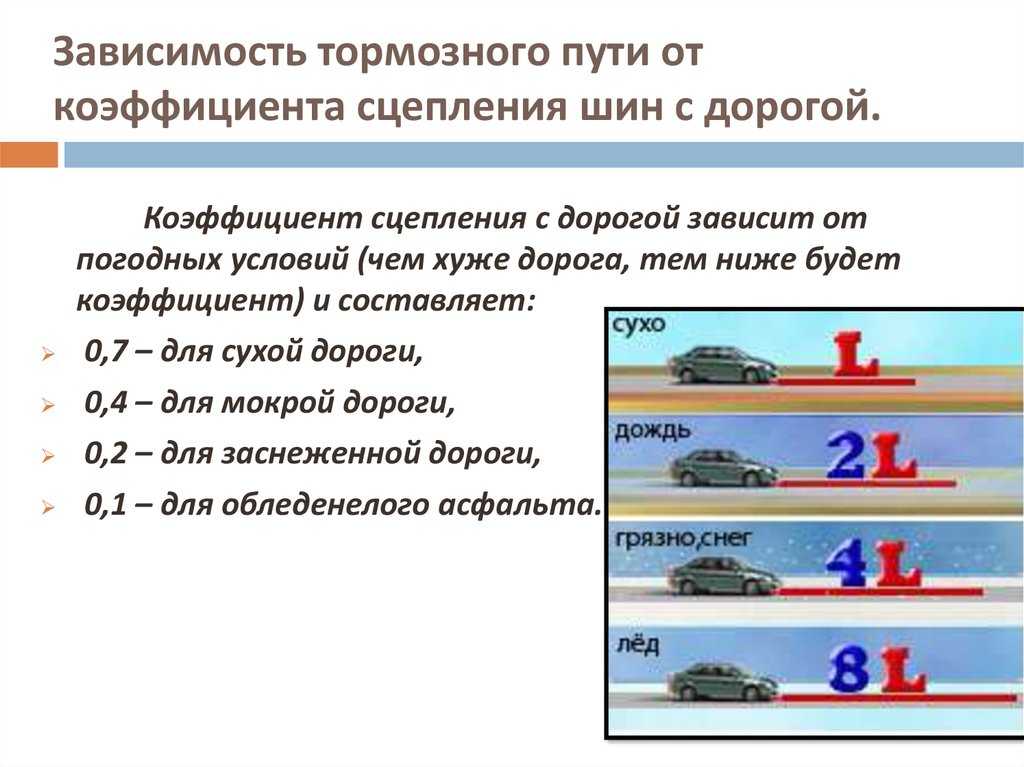
Предельное
значение касательной реакции дорог,
обусловленно сцеплением шин с дорогой
наз. силой сцепления.
Таким
образом, конструкция тормозной системы
должна создавать разное соотношение
тормозных сил Rxi
и Rx2
при торможении с различной интенсивностью.
Указанное требование трудно выполнимо
и многие автомобили имеют тормозные
системы, обеспечивающие постоянное
соотношение тормозных сил. У таких
автомобилей колеса передней и задней
оси блокируются не одновременно. Этот
недостаток устраняют путем применения
регуляторов давления и антиблокировочных
устройств, которые мы рассмотрим позже.
История развития двигателестроения Основные понятия и виды безопасности ТС -Активная безопасность -Пассивная безопасность -Послеаварийная безопасность -Экологическая безопасность Закон о БДД Партнеры Стаьи События Обучение Форум |
Управляя автомобилем, водитель постоянно изменяет его скорость, приводя ее в соответствие с окружающей обстановкой.
Современные автомобили снабжаются четырьмя тормозными системами:
Рабочая тормозная система является основной. Она предназначена для регулирования скорости автомобиля в любых условиях движения. Запасная система используется в случае отказа рабочей системы, а стояночная удерживает неподвижный автомобиль на месте. Вспомогательная тормозная система нужна для поддержания скорости автомобиля постоянной в течение длительного времени. На легковых автомобилях и грузовых автомобилях малой и средней грузоподъемности в качестве запасной тормозной системы часто используют стояночную, а во вспомогательной системе – двигатель.
|
предложениями вы можете обращаться по адресу: [email protected] |
 Остановить автомобиль на коротком расстоянии возможно лишь при наличии на автомобиле специальной системы, создающей большое дополнительное сопротивление движению и быстро снижающей скорость. Сопротивление, создаваемое тормозными механизмами, дает возможность также удерживать на месте стоящий автомобиль, а при движении на спуске предохранять его от нежелательного разгона.
Остановить автомобиль на коротком расстоянии возможно лишь при наличии на автомобиле специальной системы, создающей большое дополнительное сопротивление движению и быстро снижающей скорость. Сопротивление, создаваемое тормозными механизмами, дает возможность также удерживать на месте стоящий автомобиль, а при движении на спуске предохранять его от нежелательного разгона. На грузовых автомобилях большой грузоподъемности и автобусах большой вместимости применяют четыре раздельные тормозные системы.
На грузовых автомобилях большой грузоподъемности и автобусах большой вместимости применяют четыре раздельные тормозные системы.
Автоматическое экстренное торможение: революционная технология безопасности автомобилей
В январе 2015 года министр транспорта объявил о плане, который включает в себя добавление двух новых систем автоматического экстренного торможения (AEB) в список рекомендуемых расширенных функций безопасности, которые должны быть включены в новые модели автомобилей в будущее.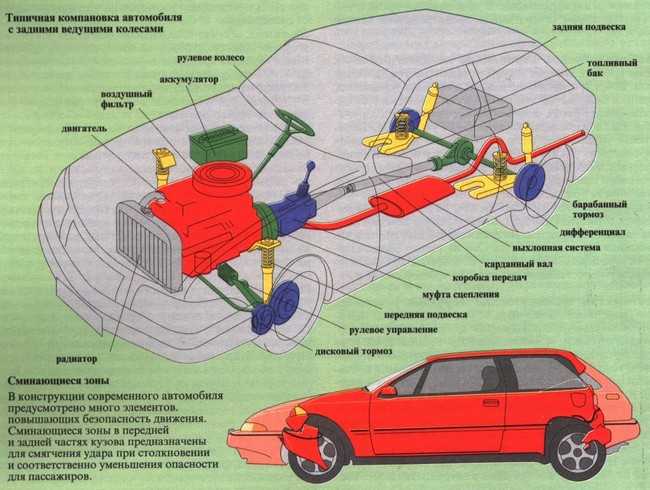 По данным Национальной администрации безопасности дорожного движения (NHTSA), это самый последний шаг за более чем 50 лет инноваций в области безопасности, которые, по оценкам, спасли более 600 000 жизней. Сегодня эта технология продолжает развиваться и приносить пользу водителям по всей Пенсильвании.
По данным Национальной администрации безопасности дорожного движения (NHTSA), это самый последний шаг за более чем 50 лет инноваций в области безопасности, которые, по оценкам, спасли более 600 000 жизней. Сегодня эта технология продолжает развиваться и приносить пользу водителям по всей Пенсильвании.
Что такое автоматические системы экстренного торможения?
Системы автоматического экстренного торможения (AEB) своевременно обнаруживают надвигающееся столкновение с другим транспортным средством, чтобы избежать столкновения или смягчить его последствия. Эти системы сначала предупреждают водителя о необходимости предпринять действия, чтобы избежать аварии. Если водитель не отреагирует вовремя, чтобы избежать аварии, система AEB может автоматически применить тормоза, чтобы помочь предотвратить или уменьшить серьезность аварии, в зависимости от марки автомобиля, которым вы управляете. Системы AEB способны спасать жизни и снижать распространенность умеренных аварий с наездом сзади.
Существует два разных типа систем AEB: динамическая поддержка торможения (DBS) и торможение при угрозе аварии (CIB). Динамическая поддержка торможения автоматически дополняет торможение водителя, если водитель не тормозит достаточно сильно, чтобы избежать аварии. Торможение при неизбежной аварии автоматически применяет торможение транспортного средства, чтобы замедлить или остановить автомобиль, если водитель не затормозит вовремя.
В следующем видео НАБДД показано значение автоматических тормозных систем и принципы их работы:
Будущее AEB
С 2015 года НАБДД поставило перед производителями автомобилей задачу сделать автоматическое экстренное торможение стандартной частью каждого автомобиля , выпущенного за 7 лет. По состоянию на март 2016 года двадцать крупных автопроизводителей США обязались сделать стандарт AEB для своих автомобилей к 1 сентября года года. 2025.
По состоянию на март 2016 года двадцать крупных автопроизводителей США обязались сделать стандарт AEB для своих автомобилей к 1 сентября года года. 2025.
The automakers who agreed to make AEB standard for passenger vehicles included:
- Audi
- BMW
- FCA US LLC
- Ford
- General Motors
- Honda
- Hyundai
- Jaguar
- Land Rover
- Lexus
- Kia
- Maserati
- Mazda
- Mercedes-Benz
- Mitsubishi Motors
- Nissan
- Porsche
- Subaru
- Toyota
- Volkswagen
- Volvo Car USA
0029 Tesla Motors Inc.
Столкновения сзади — обычное дело
По данным NHTSA, 33% всех зарегистрированных автомобильных аварий связаны со столкновением сзади с другим транспортным средством. Исследование NHTSA также показывает, что при наезде сзади многие водители либо не полностью нажимали на тормоза, либо вообще не нажимали их перед аварией. Системы автоматического экстренного торможения могут, как следует из названия, автоматически задействовать тормоза или помочь водителю полностью затормозить, чтобы избежать аварии.
Системы автоматического экстренного торможения могут, как следует из названия, автоматически задействовать тормоза или помочь водителю полностью затормозить, чтобы избежать аварии.
По данным за 2013 и 2015 годы, наезды сзади составляют 40% всех столкновений транспортных средств. Последняя дата, на которую у нас есть данные (2015 год), говорит о том, что в том году было 1,7 миллиона ударов сзади. В этих столкновениях было ранено полмиллиона человек, а погибло 1700 человек. Даже снижение этого числа на 10% избавило бы тысячи людей от боли и травм в результате автомобильной аварии.
Председатель NTSB Кристофер Харт хорошо сказал об этом в 2015 году: «Вам не нужно доплачивать за технологию, которая может полностью предотвратить столкновение». Внедрение AEB в стандартную комплектацию всех транспортных средств сделает дороги более безопасными на 9 лет.0019 всем — не только тем, кто покупает роскошные автомобили.
Какие автомобили есть у АЕБ сегодня?
В то время как федеральные нормы предписывают автоматические системы экстренного торможения в автомобилях в течение следующих нескольких лет, некоторые компании уже внедрили эту функцию в свои автомобили. Это сделало функцию AEB, которая раньше была доступна только в роскошных автомобилях, более распространенной и доступной. В настоящее время автомобили эконом-класса, такие как Hyundai Accent, Honda Fit и Chevrolet Spark, предлагают AEB в качестве стандартной функции. Эта новость означает, что это только вопрос времени, когда все новые автомобили будут оснащены этой важной технологией остановки, которая сделает дороги более безопасными для всех!
Это сделало функцию AEB, которая раньше была доступна только в роскошных автомобилях, более распространенной и доступной. В настоящее время автомобили эконом-класса, такие как Hyundai Accent, Honda Fit и Chevrolet Spark, предлагают AEB в качестве стандартной функции. Эта новость означает, что это только вопрос времени, когда все новые автомобили будут оснащены этой важной технологией остановки, которая сделает дороги более безопасными для всех!
Поранился в машине? Звоните в ХР! Опытные адвокаты по автомобильным авариям: (888) 498-3023
Пенсильванские юристы по автомобильным авариям из компании Handler, Henning & Rosenberg LLC помогли тысячам клиентов получить компенсацию, в которой они нуждались после получения травм в автомобильной аварии. Мы также вернули десятки миллионов долларов от имени нашего клиента. Наши адвокаты по автомобильным авариям будут работать для вас, чтобы установить вину другого водителя, максимизировать и доказать степень травм, а также обеспечить достаточные доходы для выплаты компенсации по вашему делу о травмах в результате автомобильной аварии. Сосредоточьтесь на том, чтобы стать лучше — мы позаботимся о том, чтобы у вас были деньги, необходимые для лечения и движения вперед. Компания Handler, Henning & Rosenberg LLC обслуживает клиентов в Гаррисберге, Ланкастере, Йорке, Ганновере и Карлайле.
Сосредоточьтесь на том, чтобы стать лучше — мы позаботимся о том, чтобы у вас были деньги, необходимые для лечения и движения вперед. Компания Handler, Henning & Rosenberg LLC обслуживает клиентов в Гаррисберге, Ланкастере, Йорке, Ганновере и Карлайле.
Начните с бесплатной консультации по делу сегодня — позвоните нам по телефону (888) 498-3023 или свяжитесь с нами с помощью нашей простой онлайн-формы.
Исследование прямой оценки тормозной силы и стратегии управления с использованием обратной модели шины
На этой странице значительно совершенствуется, а требования к характеристикам управления транспортным средством становятся все выше и выше. При прямом управлении тормозной силой в процессе замедления можно получить быструю реакцию торможения, что повышает эффективность торможения и безопасность автомобиля. В этой статье основное внимание уделяется прямой оценке тормозной силы и стратегии управления с использованием обратной модели шины, основанной на антиблокировочной тормозной системе, и для решения проблемы существующей системы АБС в основном используется антиблокировочная функция торможения, а не функция прямого управления тормозной силой. Принимая модель магической формулы за эталонную обратную модель, критические параметры для различных дорожных покрытий получаются в соответствии с данными опыта. Затем желаемый коэффициент проскальзывания, соответствующий тормозной силе, может быть получен с помощью метода справочной таблицы обратной модели быстрой шины. Принятие решения о саморегулировании трения в шине получено с использованием метода обратной модели шины. Контроллер антиблокировочной системы тормозов прямого торможения (DBF-ABS) построен с использованием метода несингулярного быстрого терминального скользящего режима. Результаты моделирования показали, что стратегия управления обладает адаптивностью и устойчивостью к изменению дорожных условий.
Принимая модель магической формулы за эталонную обратную модель, критические параметры для различных дорожных покрытий получаются в соответствии с данными опыта. Затем желаемый коэффициент проскальзывания, соответствующий тормозной силе, может быть получен с помощью метода справочной таблицы обратной модели быстрой шины. Принятие решения о саморегулировании трения в шине получено с использованием метода обратной модели шины. Контроллер антиблокировочной системы тормозов прямого торможения (DBF-ABS) построен с использованием метода несингулярного быстрого терминального скользящего режима. Результаты моделирования показали, что стратегия управления обладает адаптивностью и устойчивостью к изменению дорожных условий.
1. Введение
Для адаптации к сложным условиям работы и повышения безопасности и комфорта автомобиля представлены различные типы автомобильных активных электронных систем управления. Исследования по интегрированному управлению динамикой транспортных средств уже стали актуальной задачей, требующей решения, и привлекли к себе большое внимание [1–3].
Эти исследования в определенной степени улучшили характеристики автомобиля, но все еще требуют решения некоторых проблем. Некоторые исследования сосредоточены только на конструкции главной схемы [4–6]. Рассчитанные устойчивые боковые силы и суммарные моменты рыскания применяются без учета целевых методов производства и распределения. Влияние динамики шины в основном рассматривается как номинальные параметры, такие как базовая угловая жесткость, при формулировке задачи. Но существует взаимодействие между нелинейностью характеристик шин и динамикой автомобиля [7–10]. Однако эти исследования, основанные на конструкции основного контура, могут обеспечить максимальные запасы производительности и теоретическое понимание, а процесс создания силы движения транспортного средства не полностью учитывает особые взаимодействия между шинами и дорогой. Это может привести к недостаточной точности управления или чрезмерно оптимистичным результатам работы. Когда требуется большее усилие на шину, например, если шины имели большой коэффициент проскальзывания, применение большого тормозного усилия только усугубит ситуацию. Что еще более важно, реализация усилий на шину по-прежнему является критической проблемой в отношении управляемости [11–14].
Что еще более важно, реализация усилий на шину по-прежнему является критической проблемой в отношении управляемости [11–14].
В этом документе основное внимание уделяется прямой оценке тормозной силы и стратегии управления с использованием обратной модели шины, основанной на ABS. Основное содержание остальной части статьи состоит в следующем. В разделе 2 обсуждаются разработка и новые функции интегрированного управления транспортным средством и технологии прямого управления крутящим моментом ABS за последние годы. В разделе 3 описывается метод принятия решения о саморегулировании трения в шинах и конструкция регулятора прямого тормозного усилия DBF-ABS. Результаты имитационного анализа представлены в Разделе 4. Выводы и будущая работа представлены в Разделе 5.
2. Обзор литературы
Система АБС разрабатывается с начала 20 века [15, 16]. В конце 1970-х годов большой прогресс цифровых электронных технологий и крупномасштабных интегральных схем заложил техническую основу ABS. После середины 1980-х годов при разработке АБС больше внимания уделялось соотношению затрат и эффективности [17, 18]. Работа в этот период увеличила популярность АБС. Система ABS считается наиболее важным техническим достижением в области безопасности с момента появления ремней безопасности в автомобилях [19]., 20].
После середины 1980-х годов при разработке АБС больше внимания уделялось соотношению затрат и эффективности [17, 18]. Работа в этот период увеличила популярность АБС. Система ABS считается наиболее важным техническим достижением в области безопасности с момента появления ремней безопасности в автомобилях [19]., 20].
С повышением скорости транспортного средства и уровня интеллектуальных технологий соответствующая технология управления транспортным средством, основанная на ABS, также достигла нового и быстрого развития. EBD и ABS объединены в автомобильную вспомогательную интегрированную систему с использованием шины CAN [21]. Изучаются системы электронного управления торможением для интеллектуальных транспортных средств [22]. В последние десятилетия в АБС интеллектуальных транспортных средств широко используются передовые интеллектуальные, автоматические и компьютерные технологии, например, распределенная и самоадаптивная оценка и управление скоростью транспортных средств [23]; оптимальная скорость проскальзывания получается и отслеживается на основе многофазного метода [24, 25]. Кроме того, была предложена нелинейная стратегия прогнозирующего управления [26, 27].
Кроме того, была предложена нелинейная стратегия прогнозирующего управления [26, 27].
Особенно с улучшением интеграции транспортных средств совместное или оптимальное управление стало новым направлением исследований, таких как комбинированное экстренное торможение, интегрированное управление шасси транспортного средства [28–30] и самообучающееся адаптивное управление [31, 32]. Кроме того, с развитием современных компьютерных и коммуникационных технологий применяются некоторые новые технологии для уменьшения заторов на дорогах и безопасности вождения транспортных средств, такие как усовершенствованная система помощи при вождении и автономное вождение [33–35]. В частности, развитие интеллектуальных сетевых транспортных средств еще больше повысило безопасность транспортных средств [36, 37]. Основываясь на этих предыдущих исследованиях, эта статья посвящена прямой оценке тормозной силы и стратегии управления с использованием обратной модели шины, основанной на ABS, для решения задачи прямого управления тормозной силой.
3. Метод
В этом разделе разработана структура управления для принятия решений и управления самостоятельной регулировкой силы торможения. Требуемое трение силы прямого торможения оценивается и отслеживается. Основываясь на оценочных значениях трения в шинах, можно получить желаемый коэффициент скольжения, который соответствует конкретному желаемому трению в шинах, используя метод обратной справочной таблицы. Затем, на основе модели тормозной силы шины, метод терминального режима скольжения гарантирует, что антиблокировочная тормозная система может достичь желаемой скорости проскальзывания для получения прямого торможения.
3.1. Структура управления
Непосредственная оценка тормозной силы, решение о самонастройке и структура управления показаны на рис. 1. Детали следующие: Шаг 1: команды водителя поступают от системы педали тормоза. Управляющие входные данные, а именно управляющие моменты колес, поступают от контура сервопривода для распределения силы и крутящего момента на четыре блока контакта шины с дорогой. Шаг 2: прямое тормозное усилие оценивается с использованием таблицы быстрого поиска прямого тормозного усилия на основе обратной модели шины. Идеальное сцепление шины с дорогой достигается системой прямого принятия решений о тормозной силе. Этап 3: рассчитывается погрешность контрольной цели, и целевая управляющая сила прямого торможения получается и назначается системой прямого управления тормозной силой.
Шаг 2: прямое тормозное усилие оценивается с использованием таблицы быстрого поиска прямого тормозного усилия на основе обратной модели шины. Идеальное сцепление шины с дорогой достигается системой прямого принятия решений о тормозной силе. Этап 3: рассчитывается погрешность контрольной цели, и целевая управляющая сила прямого торможения получается и назначается системой прямого управления тормозной силой.
Наконец, моделирование и результаты анализируются на основе динамической модели транспортного средства, включая динамическую модель шины-дороги, динамическую модель транспортного средства и модель датчика тормозной силы.
3.2. Модель автомобиля
Трение шины о дорогу имеет очевидные нелинейные характеристики, которые необходимо оценить. Предпринята попытка измерить тормозной момент с помощью датчиков силы, установленных на креплениях суппорта. Предполагая, что тормозной момент может быть получен от датчиков, можно рассчитать сцепление шины с дорогой [24].
На рисунке 2 модель динамики и торможения автомобиля построена следующим образом: где M – масса автомобиля, – сила трения, – угловая скорость, – инерция колеса, – радиус колеса автомобиля, – тормозная сила, измеренная датчиком силы, представляет собой тормозной момент, представляет собой ускорение свободного падения, представляет собой вертикальную нагрузку на колесо, а i представляет собой переднее, заднее, левое и правое положение колеса.
3.3. Модель шины
Модель шины получена из формулы Magic. Волшебной формулой является универсальная полуэмпирическая модель шины [38]. Общая форма выглядит следующим образом: где коэффициент продольного трения, коэффициент жесткости шины, продольное скольжение транспортного средства, пиковое значение, коэффициент формы, коэффициент кривизны.
3.4. Проект контроллера системы прямого торможения
В этом разделе предлагается контроллер прямого тормозного усилия на основе АБС с терминальным методом управления скользящим режимом, как показано на рисунке 3.
После введения контроллера неопределенность параметров и влияние внешних помехи можно устранить.
Следующее уравнение представляет собой поверхность скольжения, разработанную в этой статье:где ; , константы, а , ; , положительные нечетные целые числа. В то же время, .
Процесс динамической регулировки режима управления скольжением состоит из этапа прибытия и двух этапов управления скольжением. Чтобы сделать многообразие переключателей достижимым, гладким и быстрым за конечное время, предлагается «терминальный аттрактор» для улучшения управления без дребезга, в то же время используя все преимущества несингулярного быстрого управления скользящим режимом терминала. Этот дизайн скользящей поверхности контроллера выглядит следующим образом: где ; ; являются нечетными целыми числами. является нечетным целым числом. В то же время, . А прямой закон управления антиблокировочной силой торможения показан ниже:
Чтобы сделать многообразие переключателей достижимым, гладким и быстрым за конечное время, предлагается «терминальный аттрактор» для улучшения управления без дребезга, в то же время используя все преимущества несингулярного быстрого управления скользящим режимом терминала. Этот дизайн скользящей поверхности контроллера выглядит следующим образом: где ; ; являются нечетными целыми числами. является нечетным целым числом. В то же время, . А прямой закон управления антиблокировочной силой торможения показан ниже:
В приведенном выше уравнении , поскольку , система устраняет проблему сингулярности и может сходиться к равновесию системы, отслеживая поверхность скольжения.
4. Моделирование и анализ
От имени доказательства эффективности саморегулирующегося решения и контроллера трения прямого торможения в этом разделе проводится моделирование. Во-первых, характеристики трения в шинах представлены с использованием трех наборов различных контрольных точек с анализом влияния этих контрольных точек на контроль скорости транспортного средства и тормозной путь транспортного средства. Затем сравнивается превосходство контроллера DBF-ABS на основе метода несингулярного быстрого скользящего режима на основе метода скользящего режима с быстрым скользящим режимом и управлением на основе Bang-Bang. Наконец, общая производительность управления самонастройкой трения в μ — условие разделения достигнуто.
Затем сравнивается превосходство контроллера DBF-ABS на основе метода несингулярного быстрого скользящего режима на основе метода скользящего режима с быстрым скользящим режимом и управлением на основе Bang-Bang. Наконец, общая производительность управления самонастройкой трения в μ — условие разделения достигнуто.
4.1. Набор параметров
Параметры, необходимые для построения системы моделирования и анализа, перечислены в таблице 1.
Различные эмпирические параметры формулы дорожного покрытия Magic можно получить в таблице 2. На основе приведенной выше информации , , , и могут быть ограничены в диапазон соответствующих различных дорог [24].
4.2. Моделирование квазилинейных характеристик зоны торможения
Тормозная сила между шиной и землей имеет характеристику, которая переходит от линейной к нелинейной, включая две области: квазилинейную зону торможения и нелинейную зону аварийного торможения, как показано в уравнении (2). Чтобы лучше оценить и контролировать прямое тормозное усилие, необходимо проанализировать характеристики взаимодействия этих двух областей.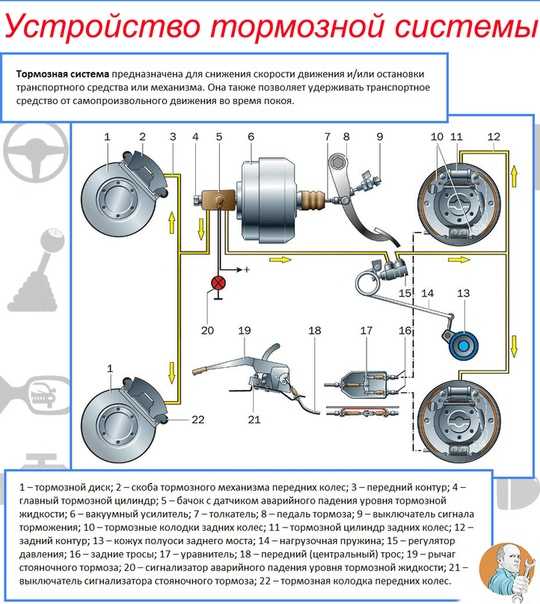 При принятии решения о саморегулировке сцепления в шинах контрольные наборы в точках квазилинейной зоны торможения были выбраны из 3 точек, то есть A, B и C. И на основе этих точек проводится моделирование. Результаты можно получить на рисунках 4 и 5. Контрольные точки (, ) находятся в пределах области, что . И, как показано на Рисунке 5, скорость проскальзывания при торможении практически не меняется, поэтому тормозной путь оказывается незначительным.
При принятии решения о саморегулировке сцепления в шинах контрольные наборы в точках квазилинейной зоны торможения были выбраны из 3 точек, то есть A, B и C. И на основе этих точек проводится моделирование. Результаты можно получить на рисунках 4 и 5. Контрольные точки (, ) находятся в пределах области, что . И, как показано на Рисунке 5, скорость проскальзывания при торможении практически не меняется, поэтому тормозной путь оказывается незначительным.
4.3. Моделирование характеристик области экстренного торможения
Уставки управления в области экстренного торможения, в , уже выбрали 3 точки, то есть A, B и C. На основе этих точек проводится моделирование. Результаты представлены на рис. 67.
Контрольные точки (, ) находятся в пределах области . Из рисунков 6 и 7 видно, что хотя шаг скорости проскальзывания такой же, как и в случае 4.2, он оказывает большее влияние на тормозной путь. Результат значительно улучшается по сравнению со случаем 4.3, поскольку информация о точках идентификации более применима к нелинейному изменению сцепления шины с дорогой. В заключение следует отметить, что точка отбора проб оказывает большее влияние на тормозной путь.
В заключение следует отметить, что точка отбора проб оказывает большее влияние на тормозной путь.
4.4. Моделирование в соответствии с
μ — Раздельное состояние различного дорожного покрытия
Тормозное усилие зависит от различных дорожных условий. Сценарии транспортного средства, работающего в условиях μ — разделение различных дорожных покрытий, выбраны для проверки самонастраивающихся и адаптивных характеристик предложенного оценщика и контроллера, как показано на рисунке 8.
Установите постоянную эталонную силу трения в этом — сплит-симуляция. Дорожные условия меняются между асфальтом, сухой дорогой и асфальтом, мокрой дорогой за 1,5 с, как показано на рисунках 9.и 10. В цифрах трение и ускорение автомобиля существенно не изменились. Как показано на рисунке 9, несмотря на то, что сила трения одинакова, на рисунке показано, что эталонное значение в 1,0 секунды уменьшается примерно с 0,054 до 0,036 по мере изменения дорожных условий. Как показано на рисунке 10, несмотря на то, что сила трения одинакова, транспортное средство сохраняет одинаковое ускорение на разных дорожных покрытиях. Однако на рисунке видно, что значение ускорения в 1,5 секунды уменьшается по мере изменения дорожных условий. Результаты показывают, что предложенный самонастраивающийся контроллер может оценивать и поддерживать значение отслеживания в соответствии с эталонным значением при различных дорожных покрытиях.
Однако на рисунке видно, что значение ускорения в 1,5 секунды уменьшается по мере изменения дорожных условий. Результаты показывают, что предложенный самонастраивающийся контроллер может оценивать и поддерживать значение отслеживания в соответствии с эталонным значением при различных дорожных покрытиях.
Кроме того, предложенный контроллер прямого тормозного усилия (контроллер A) сравнивается с контроллером скользящего режима быстрого вывода (контроллер B) и релейным контроллером (контроллер C). Из рисунка 9 контроллер A сходится между эталонным и реальным значением трения быстрее, чем контроллеры B и C. На рисунке 10 результаты аналогичны для управления ускорением транспортного средства. Судя по результатам, хотя производительность контроллера Bang-Bang не так хороша, как у двух других, он часто используется в технике из-за его простой структуры и низких требований к управляющему процессору. На рисунке показано, что предлагаемый контроллер DBF-ABS может поддерживать согласованность значения отслеживания с лучшей производительностью.
5. Выводы и будущая работа
На основе существующей АБС была предложена своего рода стратегия прямой оценки и контроля тормозной силы, основанная на системе управления DBF-ABS, для решения проблемы существующей системы АБС, которая в основном представляет собой антиблокировочную функцию торможения. , нет функции прямого управления тормозной силой. При прямом управлении тормозной силой в процессе замедления можно получить быструю реакцию торможения, что повышает эффективность торможения и безопасность автомобиля. Во-первых, используя модель магической формулы в качестве эталонной обратной модели, критические параметры для различных дорожных покрытий получаются в соответствии с данными опыта. Затем желаемый коэффициент проскальзывания, соответствующий тормозной силе, может быть получен с помощью метода справочной таблицы обратной модели шины. Принятие решения о саморегулировании трения в шине получено с использованием метода обратной модели шины. Контроллер антиблокировочной тормозной системы прямого торможения (DBF-ABS) построен с использованием несингулярного алгоритма быстрого терминального скользящего режима. Наконец, результаты моделирования и анализа показывают, что метод управления обладает адаптивностью и стабильностью в различных условиях вождения.
Наконец, результаты моделирования и анализа показывают, что метод управления обладает адаптивностью и стабильностью в различных условиях вождения.
Из-за ограниченного количества сенсорного оборудования для прямого сбора данных управления тормозной силой будущая работа будет сосредоточена на усовершенствованных сенсорах и оценке данных. Кроме того, интересной темой является более широкий диапазон динамического адаптивного прямого управления тормозным моментом и согласование с AEBS.
Доступность данных
Данные, использованные для поддержки результатов этого исследования, можно получить у соответствующего автора по запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в связи с публикацией этой статьи.
Благодарности
Эта работа была частично поддержана Общественными проектами провинции Чжэцзян (№ LGG19E050001) и проектом, названным исследованием ключевых технологий мониторинга и раннего предупреждения об оперативной слепой зоне для грузовых автомобилей. И эта работа была частично поддержана Ключевой лабораторией технологий безопасности транспортных средств в транспортной отрасли, проект открытия, и проект, названный исследованием метода мониторинга слепых зон автомобильного поезда.
И эта работа была частично поддержана Ключевой лабораторией технологий безопасности транспортных средств в транспортной отрасли, проект открытия, и проект, названный исследованием метода мониторинга слепых зон автомобильного поезда.
Ссылки
П. Сонг, М. Томизука и К. Зонг, «Новый интегрированный контроллер шасси для автомобилей с полным приводом по проводам», Vehicle System Dynamics , vol. 53, нет. 2, стр. 215–236, 1 февраля 2015 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
К. Гао, Ю. Ян и С. Цюй, «Расходящиеся эффекты субъективных перспективных значений неопределенного времени и денег», Communications in Transportation Research , vol. 1, с. 100007–102021, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Р. Чжан, К. Ли, Ф. Ю и З.
Хе, «Новая конструкция электронной тормозной системы для электромобилей на основе ограниченного нелинейного иерархического управления», International Journal of Automotive Technology , vol. 18, нет. 4, стр. 707–718, 2017.Посмотреть по адресу:
Сайт издателя | Google Scholar
М. Нагаи, М. Шино и Ф. Гао, «Исследование комплексного управления активным передним углом поворота и прямым моментом рыскания», Обзор JSAE , том. 23, нет. 3, стр. 309–315, 2002.
Посмотреть по адресу:
Сайт издателя | Google Scholar
C. Li, Y. Xie, G. Wang, X. Zeng и H. Jing, «Регулирование боковой устойчивости интеллектуального электромобиля на основе прогнозирующего управления с помощью моделей», Journal of Intelligent and Connected Vehicles , том. 4, нет. 3, стр. 104–114, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Ю.
Кай, Т. Луан, Х. Гао и Х. Ван, «Yolov4-5D: эффективный и действенный детектор объектов для автономного вождения», IEEE Transactions on Instrumentation and Measurement , vol. 70, ID статьи 4503613, стр. 1–13, 2021 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
Д. Ли и Ф. Ю, Новый интегрированный контроллер шасси транспортного средства, координирующий прямое управление моментом рыскания и активное рулевое управление , SAE, Thousand Oaks, CA, USA, 2007.
Посмотреть по адресу:
Издатель Site
X. Shen и F. Yu, «Исследование интеграции управления шасси транспортного средства на основе подхода к проектированию основного контура — внутреннего контура», Труды Института инженеров-механиков — Часть D: Journal of Automobile Engineering , J. Automobile Engineering, vol. 220, нет.
11, стр. 1491–1502, 2006.Посмотреть по адресу:
Сайт издателя | Google Scholar
Т. Дж. Гордон, «Методология управления на основе гибкой иерархической модели для систем активной безопасности транспортных средств», Vehicle System Dynamics , vol. 46, нет. 1, стр. 63–75, 2008 г.
Посмотреть по адресу:
Сайт издателя | Академия Google
М. Б. Альбердинг, «Нелинейное иерархическое распределение управления для стабилизации рыскания автомобиля и предотвращения опрокидывания», в Proceedings of the European Control Conference 2009 (ECC) , дипломная работа, Будапешт, Венгрия, август 2008 г.
Посмотреть по адресу:
Google Scholar
Дж. Деур, Д. Павкович, Г. Бурджио и Д. Хроват, «Стратегия контроля тяги на основе моделей, не зависящая от информации о проскальзывании колес», Динамика систем автомобиля , том.
49, нет. 8, стр. 1245–1265, 2011.Посмотреть по адресу:
Сайт издателя | Google Scholar
Альварес Л., Йи Дж., Горовиц Р. и Олмос Л. «Оценка сцепления шины с дорогой на основе модели динамического трения и управление аварийным торможением», Journal of Dynamic Systems, Measurement, and Control , том. 127, нет. 1, стр. 22–32, 2005 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Т. Шим и Д. Марголис, «Оценка сцепления с дорогой на основе моделей», Динамика систем автомобиля , том. 41, нет. 4, стр. 249–276, 2004 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Д. Павкович, Дж. Деур, Г. Бургио и Д. Хроват, «Оценка градиента статической кривой шины и связанное с ней приложение контроля тяги на основе модели», в Proceedings of the 2009 IEEE Multi.
-конференция по системам и управлению , стр. 594–599, Санкт-Петербург, Россия, июль 2009 г.Посмотреть по адресу:
Сайт издателя | Академия Google
Ю. Шамайяр, Гиссинджер Г. Л., Перронн Дж. М. и Реннер М., «Оригинальный контроллер торможения с датчиком крутящего момента», в Трудах третьей конференции IEEE по приложениям управления , стр. 619–625, Глазго, Великобритания, август 1994 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Г. Л. Гиссинджер, К. Менар и А. Констанс, «Мехатронная концепция новой интеллектуальной тормозной системы», Control Engineering Practice , том. 11, нет. 2, стр. 163–170, 2003 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
T. Ishige, H.
Furusho, Y. Aoki, and K. Kawagoe, Adaptive Slip Control Using the Brake Torque Sensor , AVEC, 2008.M. Gerard and M. Verhaegen, в Proceedings of the American Control Conference 2009 Hyatt Regency Riverfront , стр. 677–682, Сент-Луис, Миссури, США, июнь 2009 г.
М. Гобби, Дж. К. Ботеро и Г. Мастину, активная безопасность дорожных транспортных средств путем измерения сил и моментов на колесах» Динамика систем автомобиля , том. 46, нет. 1, стр. 957–968, 2008 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
М. Брусароско, А. Сигада и С. Манцони, «Экспериментальное исследование динамики шин с помощью акселерометров МЭМС, закрепленных на лайнере», Vehicle System Dynamics , vol. 46, нет. 11, стр. 1013–1028, 2008.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Ю.
Цю, Дж. Фанг и З. Чжу, «Автомобильная вспомогательная тормозная система с ABS/EBD на основе шины CAN», в Материалы 7-го Международного симпозиума по надежности систем и программного обеспечения (ISSSR) 2021 г. , Чунцин, Китай, сентябрь 2021 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
Z. Xue, C. Li, X. Wang и Z. Zhong, «Coordinated control of steer-by», IET Intelligent Transport Systems , vol. 14, нет. 14, стр. 2122–2132, 2020.
Посмотреть по адресу:
Сайт издателя | Google Scholar
З.-Г. Чжао, Л.Дж. Чжоу, Дж.Т. Чжан, К. Чжу и Дж.-К. Хедрик, «Распределенная и самоадаптирующаяся оценка скорости транспортного средства в случае составного торможения для полноприводного гибридного электромобиля», Динамика систем автомобиля , том. 55, нет. 5, стр. 750–773, 2017.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Р. Х. Чжан, З. К. Хе, Х. В. Ван, Ф. Ю и К. Н. Ли, «Исследование самонастраивающегося управления трением в шинах для разработки интегрированной системы управления шасси основного контура сервопривода», IEEE Access , том . 5, стр. 6649–6660, 2017.
Посмотреть по адресу:
Сайт издателя | Google Scholar
C. Du, F. Li, C. Yang, Y. Shi, L. Liao, and W. Gui, «Многофазное управление оптимальным коэффициентом скольжения противоюзовой тормозной системы самолета с подход скользящего режима заказа», IEEE , том. 27, нет. 2, стр. 823–833, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Г. Моррисон и Д. Себон, «Комбинированное экстренное торможение и поворот сочлененных большегрузных транспортных средств», Vehicle System Dynamics , vol.
55, нет. 5, стр. 725–749, 2017.Посмотреть по адресу:
Сайт издателя | Google Scholar
Q. Wang, L. Liu, and W. Chen, «Интегрированное управление автомобильной системой рулевого управления с электроусилителем и системой подвески на основе случайного субоптимального управления», Китайское машиностроение , том. 16, нет. 8, pp. 743–747, 2005.
Просмотр по адресу:
Google Scholar
Д. Ли и С. Ду, «Интегрированное управление шасси транспортного средства на основе прямого момента рыскания, активного рулевого управления и активного стабилизатора», Динамика систем автомобиля , том. 46, нет. 1, стр. 341–351, 2008 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
J. Zhang, W. Sun и H. Du, «Интегрированная схема управления движением для четырехколесных независимых транспортных средств с учетом критических условий», IEEE Transactions on Vehicular Technology , vol.
68, нет. 8, стр. 7488–7497, 2019.Посмотреть по адресу:
Сайт издателя | Google Scholar
Чжан Р., Ли К., Хе З. и Ван Х., «Усовершенствованное управление аварийным торможением на основе алгоритма прогнозирования нелинейной модели для интеллектуальных транспортных средств», , Прикладные науки, , том. 7, нет. 5, с. 504, 2017.
Посмотреть по адресу:
Сайт издателя | Google Scholar
С. Раджендран, С. Сперджен, Г. Цампардукас и Р. Хэмпсон, «Самообучающееся адаптивное интегрированное управление электромобилем при экстренном торможении», в Proceedings of the European Control Conference (ECC) 2021 , Делфт, Нидерланды, июль 2021 г.
Посмотреть по адресу:
Google Scholar
С. Чен, X. Чжан и Дж. Ван, «Управление скользящим режимом транспортного средства, оборудованного тормозной системой с учетом комфорта при торможении», Удары и вибрация , том.
2020, ID статьи 5602917, стр. 1–13, 2020.Посмотреть по адресу:
Сайт издателя | Google Scholar
Y. Xu, Z. Ye и C. Wang, «Моделирование принятия водителями коммерческого транспорта усовершенствованной системы помощи при вождении (ADAS)», Журнал интеллектуальных и подключенных транспортных средств , том. 4, нет. 3, стр. 125–135, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
M. Gressai, B. Varga, T. Tettamanti, and I. Varga, «Изучение последствий снижения ограничения скорости в городах с помощью микроскопического моделирования дорожного движения», Communications in Transportation Research , vol. 1, ID статьи 100018, 2021.
Посмотреть по адресу:
Сайт издателя | Академия Google
Z.
Yang, J. Huang, D. Yang и Z. Zhong, «Проектирование и оптимизация надежного управления отслеживанием пути для автономных транспортных средств с нечеткой неопределенностью», IEEE Transactions on Fuzzy Systems , vol. 30, нет. 6, стр. 1788–1800, 2022.Посмотреть по адресу:
Сайт издателя | Google Scholar
Дж. Ларссон, М. Ф. Кескин, Б. Пэн, Б. Кульсар и Х. Ваймерш, «Просоциальный контроль подключенных автоматических транспортных средств в многополосном дорожном движении со смешанной автономией», Коммуникации в транспортных исследованиях , vol. 1, ID статьи 100019, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Х. Ли, Дж. Чжан, З. Чжан и З. Хуан, «Активное управление полосой движения для интеллектуальных подключенных транспортных средств на извилистых участках городских скоростных автомагистралей», Journal of Intelligent and Connected Vehicles , vol.
 Хе, «Новая конструкция электронной тормозной системы для электромобилей на основе ограниченного нелинейного иерархического управления», International Journal of Automotive Technology , vol. 18, нет. 4, стр. 707–718, 2017.
Хе, «Новая конструкция электронной тормозной системы для электромобилей на основе ограниченного нелинейного иерархического управления», International Journal of Automotive Technology , vol. 18, нет. 4, стр. 707–718, 2017.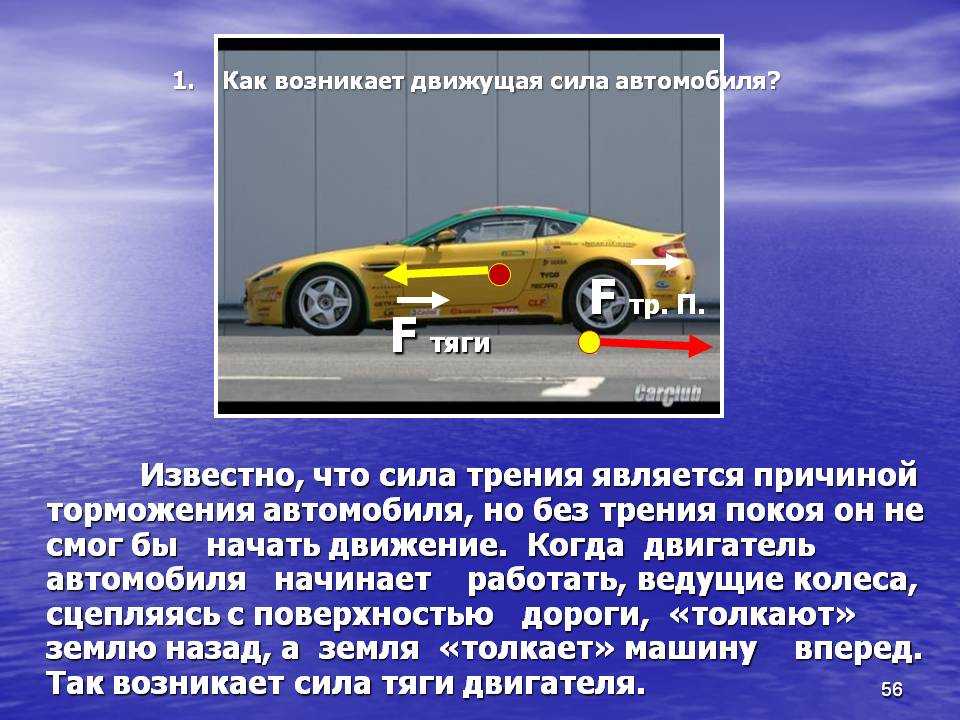 Кай, Т. Луан, Х. Гао и Х. Ван, «Yolov4-5D: эффективный и действенный детектор объектов для автономного вождения», IEEE Transactions on Instrumentation and Measurement , vol. 70, ID статьи 4503613, стр. 1–13, 2021 г.
Кай, Т. Луан, Х. Гао и Х. Ван, «Yolov4-5D: эффективный и действенный детектор объектов для автономного вождения», IEEE Transactions on Instrumentation and Measurement , vol. 70, ID статьи 4503613, стр. 1–13, 2021 г.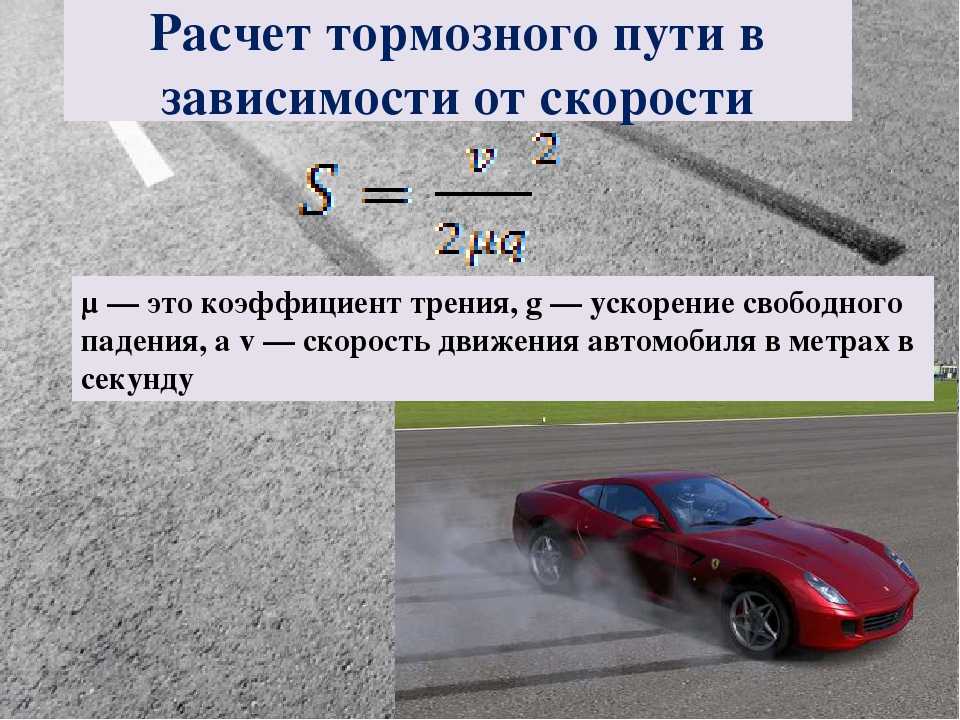 11, стр. 1491–1502, 2006.
11, стр. 1491–1502, 2006.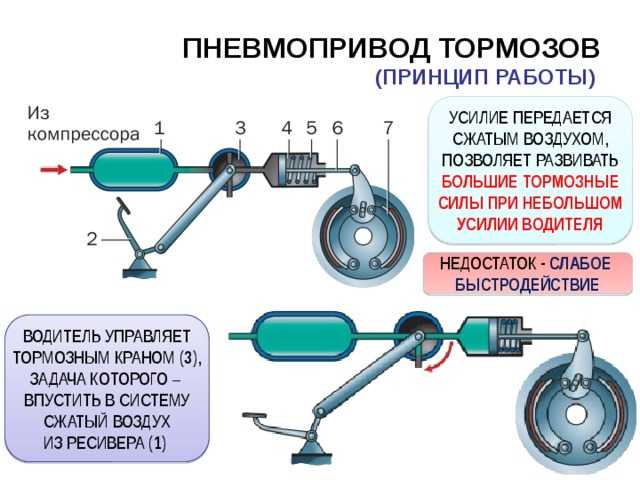 49, нет. 8, стр. 1245–1265, 2011.
49, нет. 8, стр. 1245–1265, 2011. -конференция по системам и управлению , стр. 594–599, Санкт-Петербург, Россия, июль 2009 г.
-конференция по системам и управлению , стр. 594–599, Санкт-Петербург, Россия, июль 2009 г. Furusho, Y. Aoki, and K. Kawagoe, Adaptive Slip Control Using the Brake Torque Sensor , AVEC, 2008.
Furusho, Y. Aoki, and K. Kawagoe, Adaptive Slip Control Using the Brake Torque Sensor , AVEC, 2008. Цю, Дж. Фанг и З. Чжу, «Автомобильная вспомогательная тормозная система с ABS/EBD на основе шины CAN», в Материалы 7-го Международного симпозиума по надежности систем и программного обеспечения (ISSSR) 2021 г. , Чунцин, Китай, сентябрь 2021 г.
Цю, Дж. Фанг и З. Чжу, «Автомобильная вспомогательная тормозная система с ABS/EBD на основе шины CAN», в Материалы 7-го Международного симпозиума по надежности систем и программного обеспечения (ISSSR) 2021 г. , Чунцин, Китай, сентябрь 2021 г.
 55, нет. 5, стр. 725–749, 2017.
55, нет. 5, стр. 725–749, 2017. 68, нет. 8, стр. 7488–7497, 2019.
68, нет. 8, стр. 7488–7497, 2019. 2020, ID статьи 5602917, стр. 1–13, 2020.
2020, ID статьи 5602917, стр. 1–13, 2020. Yang, J. Huang, D. Yang и Z. Zhong, «Проектирование и оптимизация надежного управления отслеживанием пути для автономных транспортных средств с нечеткой неопределенностью», IEEE Transactions on Fuzzy Systems , vol. 30, нет. 6, стр. 1788–1800, 2022.
Yang, J. Huang, D. Yang и Z. Zhong, «Проектирование и оптимизация надежного управления отслеживанием пути для автономных транспортных средств с нечеткой неопределенностью», IEEE Transactions on Fuzzy Systems , vol. 30, нет. 6, стр. 1788–1800, 2022.