Содержание
8.11. Номинальный режим работы двигателя пост тока
В
паспорте двигателя и справочной
литературе на двигатели постоянного
тока указаны следующие технические
данные: номинальные
напряжение Uи,
мощность Pн,
частота вращения nн,
ток
Iн,
КПД.
Под
номинальным Uн
понимают напряжение, на которое
рассчитаны
обмотка якоря и коллектор, а также в
большинстве
случаев и параллельная обмотка
возбуждения. С учетом номинального
напряжения выбирают электроизоляционные
материалы
двигателя.
Номинальный
ток Iн
– максимально допустимый ток (потребляемый
из сети), при котором двигатель нагревается
до наибольшей
допустимой температуры, работая в том
режиме (длительном,
повторно-кратковременном, кратковременном),
на который рассчитан:
где
Iян
—
ток якоря при номинальной нагрузке;
Iвн
–
ток обмотки возбуждения
при номинальном напряжении.
Следует
отметить, что ток возбуждения Iвн
двигателя параллельного
возбуждения сравнительно мал, поэтому
при номинальной
нагрузке обычно принимают
Номинальная
мощность Рн
— это мощность, развиваемая двигателем
на валу при работе с номинальной
нагрузкой (моментом) и
при номинальной частоте вращения nн.
Частота
вращения nн,
и КПД соответствуют работе двигателя
с током Iн,
напряжением Uн
без дополнительных резисторов
в цепях двигателя.
В
общем случае мощность на валу P2,
момент М и частота вращения
n
связаны соотношением:
Потребляемая
двигателем из сети мощность Р1,
величины P2,
КПД,
U,
I
связаны соотношениями:где
Очевидно,
что эти соотношения справедливы также
и для номинального режима работы
двигателя.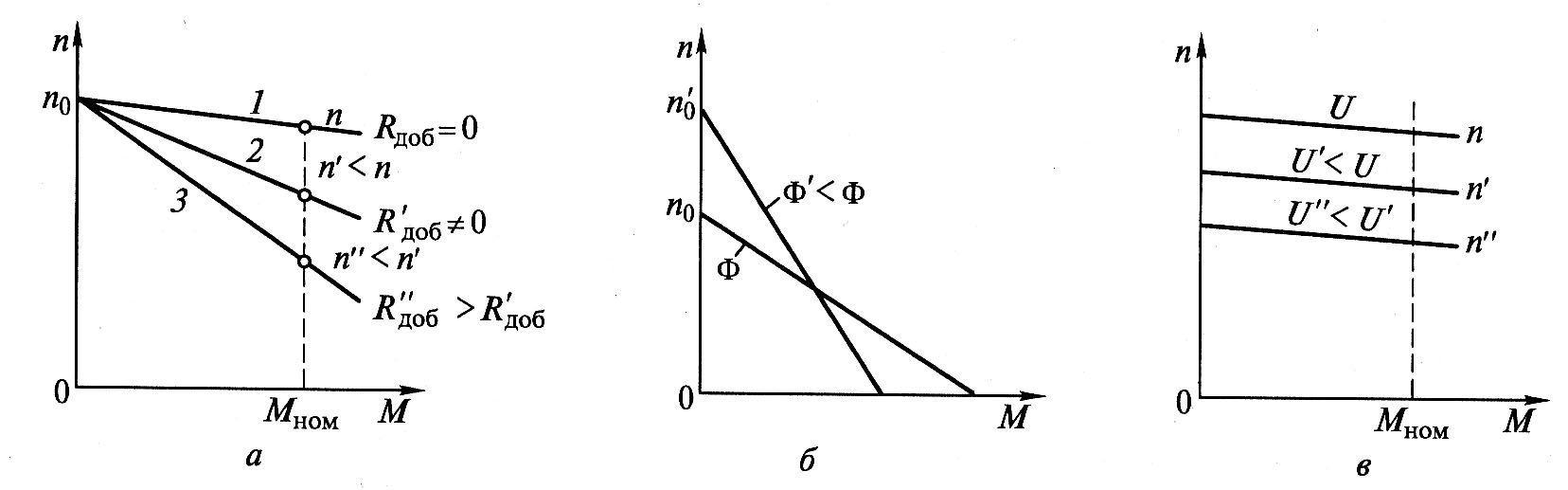
8.11. Двигатель с последовательным возбуждением.
У
такого двигателя ток якоря является
одновременно и током возбуждения, т.к.
обмотка возбуждения включена
последовательно с якорем. По этой
причине магнитный поток двигателя
изменяется с изменением нагрузки.
Скорость двигателя :
n
=[ U – Iя (Rя + Rв)] / c∙Φ, где
Rя
– сопротивление якоря
Rв
– сопротивление обмотки возбуждения.
Скоростная
характеристика двигателя посл.
возбуждения.
На
этом графике представлена скоростная
характеристика двигателя последовательного
возбуждения.
Из
этой характеристики видно, что скорость
двигателя сильно зависит от нагрузки.
При увеличении нагрузки увеличивается
падение на сопротивлении обмоток при
одновременном увеличении магнитного
потока, что приводит к значительному
уменьшению скорости вращения. Поэтому
такие двигатели не следует пускать
вхолостую или с малой нагрузкой.
Двигатели с последовательным возбуждением
применяют в тех случаях, когда необходим
большой пусковой момент или способность
выдерживать кратковременные перегрузки.
Они используются в качестве тяговых
двигателей в трамваях, троллейбусах,
метро и электровозах, а также на подъёмных
кранах и для пуска двигателей внутреннего
сгорания (стартеры).
8.12. Двигатель постоянного тока со смешанным возбуждением
На
каждом полюсе такого двигателя имеются
две обмотки – параллельная и
последовательная. Их можно включить
так, чтобы магнитные потоки складывались
(согласное включение) или вычитались
(встречное включение). Формулы для
скорости вращения и вращающего момента
для такого двигателя:
n
= (U – Iя ∙ Rя ) / c∙( Φпарал. +/- Φпосл.)
М
= c ∙ Iя ∙ (Φпарал. +/- Φпосл.)
В
зависимости от соотношения магнитных
потоков двигатель со смешанным
возбуждением по своим свойствам
приближается либо к двигателю с
последовательным возбуждением, либо
к двигателю с параллельным возбуждением.
Как правило, у таких двигателей
последовательная обмотка является
главной (рабочей), а параллельная –
вспомогательной. Благодаря наличию
Благодаря наличию
магнитного потока параллельной обмотки,
скорость такого двигателя не может
сильно возрастать на малых нагрузках.
Двигатели с согласным включением
применяются, когда необходим большой
пусковой момент и регулировка скорости
при переменных нагрузках. Двигатели
со встречным включением обмоток
применяются в тех случаях, когда
необходима постоянная скорость при
изменяющейся нагрузке.
Для
изменения направления вращения двигателя
постоянного тока надо изменить
направление тока либо в обмотке
возбуждения, либо в обмотке якоря.
Изменением полярности на клеммах машины
можно поменять направление вращения
только в двигателе с постоянным
магнитом или независимым возбуждением.
В других двигателях надо изменить
направление тока либо в якорной обмотке,
либо в обмотке возбуждения. Двигатель
постоянного тока нельзя
включать подсоединением полного
напряжения.
Пусковой ток машин постоянного тока
где-то в 20 раз превышает номинальный
ток (он тем больше, чем больше и быстрее
мотор). В больших машинах пусковой ток
В больших машинах пусковой ток
может превышать номинальный ток в 50
раз.
Большой
ток вызывает в коллекторе круговое
искрение и разрушает коллектор. Для
включения применяют плавное увеличение
напряжения или пусковые реостаты.
Прямое включение допускается при низких
напряжениях в случае маленьких
двигателей, у которых сопротивление
обмотки якоря большое.
Управление возбуждением двигателей постоянного тока
Управление двигателями постоянного тока
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого (рис.1), параллельного (рис.2), последовательного (рис.3) и смешанного (рис.4) возбуждения. При параллельном, последовательном и смешанном возбуждении напряжение на обмотке возбуждения зависит от напряжения на обмотке якоря, при независимой системе возбуждения, обмотка возбуждения питается от дополнительного источника постоянного тока и не зависит от режима работы и нагрузки двигателя.
Рис.1 Схема независимого возбуждения
Рис.2 Схема параллельного возбуждения
Рис.3 Схема последовательного возбуждения
Рис.4 Схема смешанного возбуждения
Для регулирования скорости двигателей постоянного тока применяют различные способы.
В общем случае скорость двигателя определяется выражением:
Как видно из выражения (1.1), регулировать скорость двигателя постоянного тока возможно двумя способами:
— Изменением питающего напряжения U
— Изменением магнитного потока машины Ф (изменением тока возбуждения)
Раньше регулирование питающего напряжения встречало трудности связанные с преобразованием напряжения постоянного тока, изменение скорости вращения двигателя осуществлялось с помощью включения в цепь якоря дополнительного регулировочного реостата. Основными недостатками этого метода являются потери в реостате, через который протекает ток полной нагрузки двигателя, неудобство управления.
Наиболее удобным, распространенным и экономичным способом регулирования скорости вращения двигателя постоянного тока, является изменение магнитного потока машины (изменение тока возбуждения). Экономия связана с тем, что в данном случае управлять можно не большим током якоря, а малым током возбуждения, что уменьшает потери и удешевляет систему управления. Однако этот способ позволяет лишь увеличивать скорость вращения двигателя.
Согласно выражению (1.1), с уменьшением Ф скорость возрастает (рис.5). Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Ф, т. е. с наименьшей величиной n. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, и потери при регулировании минимальны. Максимальная скорость вращения в данном случае ограничивается механической прочностью машины и условиями ее коммутации.
Рис.5 Характеристики ДПТ при регулировании тока возбуждения
Современные способы регулирования скорости двигателей постоянного тока
Сегодня основным средством управления двигателями постоянного тока становятся современные тиристорные регуляторы (назовем их “приводы постоянного тока”), их производят множество фирм, специализирующихся на приводной технике (например, Control Techniques, Siemens, Sprint-Electric и т. д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
Приводы постоянного тока могут работать как в одном квадранте, так и во всех четырех, при этом изменяя не только ток обмотки якоря, но и ток обмотки возбуждения — многие приводы имеют встроенные “контроллеры поля”, что дает возможность регулировать скорость двигателя в самом широком диапазоне.
Следует отметить, что “ослабление” поля при задании скорости двигателя выше номинальной, привод производит автоматически, контроллер поля представляет собой тот же тиристорный регулятор. Встроенные контроллеры поля имеют приводы Mentor, Mentor MP (Control Techniques), PL, PLX (Sprint-Electric). Остальные модели приводов постоянного тока этих брендов для питания обмотки возбуждения двигателей имеют неуправляемые выпрямители.
Номинальный ток контроллеров возбуждения приводов постоянного тока имеют следующие значения:
Sprint-Electric PL, PLX — 8A (для приводов с номинальным током якоря 12-123A), 16A (для приводов с номинальным током якоря 155-330A), 32A (для приводов с номинальным током якоря 430-630A).
Control Techniques Mentor — M25(R) — M210(R) — 8 А, остальные габариты с неуправляемым выпрямителем.
Control Techniques Mentor MP —
MP25Ax(R), MP45Ax(R), MP75Ax(R), MP105Ax(R), MP155Ax(R), MP210Ax(R) — 8А
MP350Ax(R), MP420Ax(R), MP550Ax(R), MP700Ax(R), MP825Ax(R), MP900Ax(R) — 10A
MP1200Ax(R), MP1850Ax(R) — 20А.
Для токов обмотки возбуждения имеющих значение свыше 8А, Control Techniques предлагает внешние контроллеры поля, которые связываются с приводом постоянного тока по цифровой шине — это контроллеры FXM-5 (до 90А) и FXMP-25 (до 25А).
На практике часто встречаются двигатели с низковольтными обмотками возбуждения с большими токами.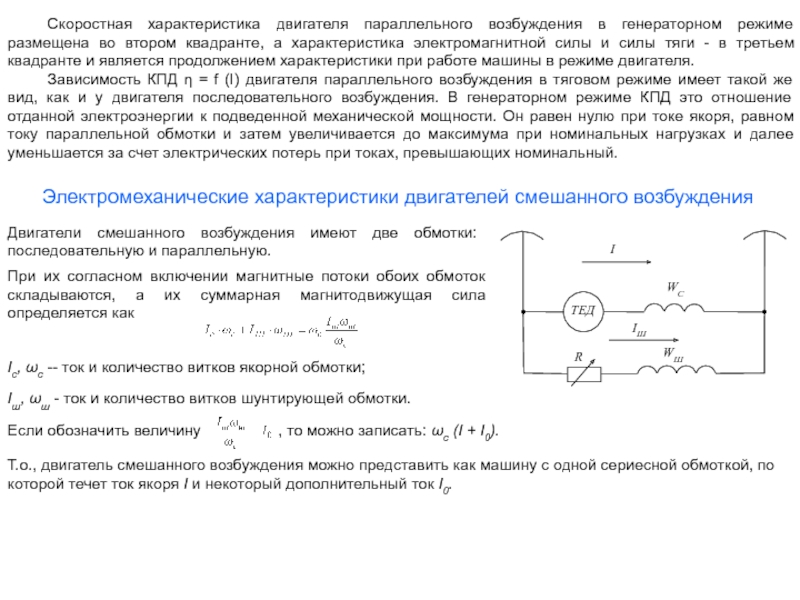 В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом.
В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом.
Привод Mentor MP (Control Techniques) имеет для этого специальный режим.
По всем возникшим вопросам обращайтесь пишите нам на [email protected], тел.(812) 635-9030
Модель двигателя постоянного тока
с электрическими и моментными характеристиками и неисправностями
моделирование
Блок DC Motor представляет электрические и крутящие
Характеристики двигателя постоянного тока с использованием следующей модели эквивалентной схемы:
Параметры эквивалентной схемы для этой модели указываются при установке
Параметризация модели параметр до По эквиваленту .
параметры схемы  Резистор R соответствует
Резистор R соответствует
сопротивление, которое вы указываете в Параметр сопротивления якоря .
Катушка индуктивности L соответствует индуктивности, указанной в якоре .
индуктивность параметр.
Вы можете указать, как генерировать магнитное поле двигателя постоянного тока, установив
Введите параметр поля для нужной опции. постоянный
магниты в двигателе индуцируют следующую противо-ЭДС
v b в якоре:
vb=kvω
, где k v
Постоянная противо-ЭДС и ω — угловая
скорость. Двигатель создает следующий крутящий момент, который пропорционален двигателю
текущий i :
TE=kti
где k t
Константа крутящего момента . Двигатель постоянного тока
блок предполагает отсутствие электромагнитных потерь. Это означает, что механическая сила
Это означает, что механическая сила
равна электрической мощности, рассеиваемой противо-ЭДС в якоре. Приравнивание
эти два члена дают:
TEω=vbiktiω=kvωikv=kt
В результате вы указываете либо
к v или
k t в параметрах блока.
Если магнитное поле создается током, протекающим по обмоткам,
Постоянная обратной ЭДС зависит от тока возбуждения
I f :
kv=LafIf
где L af
Взаимная индуктивность возбуждения-якоря .
Характеристика скорости вращения для блока DC Motor
относится к параметрам на предыдущем рисунке. При установке модели
параметризация параметр по По крутящему моменту и холостому ходу или
скорость По номинальной нагрузке и скорости блок
решает для параметров эквивалентной схемы следующим образом:
0009 Л есть
нет эффекта.
Суммируйте напряжения вокруг контура и переставьте для i :
i=V−vbR=V−kvωR
Подставьте это значение i в уравнение для крутящего момента:
TE=ktR(V−kvω)
При установке параметра Параметризация модели на
По крутящему моменту и скорости холостого хода,
блок использует момент опрокидывания и скорость холостого хода, чтобы определить значения для
Р и к т
(и эквивалентно k v ).При установке параметра Параметризация модели на
По номинальной нагрузке и скоростиблок использует
номинальная скорость и мощность для расчета номинального крутящего момента. В блоке используется
значения номинального крутящего момента и скорости холостого хода для определения значений
Р и
к т .


Блок моделей инерции двигателя Дж и демпфирования λ
для всех значений параметра Параметризация модели .
результирующий крутящий момент на блоке:
T=ktR(V−kvω)−Jω˙−λω
Не всегда возможно измерить демпфирование ротора, а демпфирование ротора не всегда
указан в паспорте производителя. Альтернативой является использование тока холостого хода для
определите значение демпфирования ротора.
На холостом ходу создаваемый электричеством механический крутящий момент должен равняться демпфированию ротора
крутящий момент:
ktinoload=λωnoload
, где i noload — ток холостого хода. Если вы
выберите По току холостого хода для Демпфирование ротора
параметризация , то это уравнение используется в дополнение к
уравнение крутящий момент-скорость для определения значений для λ и других
коэффициенты уравнения.
Значение демпфирования ротора, указанное напрямую или в терминах холостого хода
тока, учитывается при определении параметров схемы замещения для
Параметризация модели Опции По крутящему моменту и и
скорость холостого хода По номинальной нагрузке и .
скорость
При протекании положительного тока от электрического + к
портов — , положительный крутящий момент действует от механического
C до R портов.
Ошибки
Блок DC Motor позволяет моделировать два типа
сбои:
Блок может инициировать события сбоя:
Вы можете включить или отключить эти триггерные механизмы по отдельности.
Вы можете выбрать, следует ли выдавать подтверждение при возникновении ошибки, используя
Сообщение о возникновении ошибки параметр. Утверждение может
Утверждение может
принимать форму предупреждения или ошибки. По умолчанию блок не выдает
утверждение.
На этом рисунке показано общее представление двигателя постоянного тока со щетками, якорем,
коммутаторов и их обмоток:
При установке Включить обрыв обмотки якоря
параметр на На якорь выходит из строя в указанное время
по Время имитации события отказа обмотки якоря
параметр для временной неисправности, или когда токи обмотки превышают значение
Максимально допустимый ток обмотки якоря Параметр для
поведенческая ошибка. При выходе из строя якоря подключаемый к нему источник напряжения
блок наблюдает обрыв цепи в течение части полного оборота двигателя,
определяется Доля оборота, в течение которой якорь
параметр разомкнутой цепи , rev_faulted . Эта фигура
Эта фигура
иллюстрирует поведение состояния схемы для определенных rev_faulted
в течение всего периода оборота:
Предопределенная параметризация
Для постоянного магнита доступно несколько встроенных параметров
Блок двигателя постоянного тока.
Эти данные предварительной параметризации позволяют настроить блок для представления
комплектующие от конкретных поставщиков. Параметры этих двигателей постоянного тока соответствуют
паспорта производителя. Чтобы загрузить предопределенную параметризацию, дважды щелкните значок контроллера домена.
Моторный блок, нажмите <щелкните, чтобы выбрать>
гиперссылка параметра Selected part и в блоке
В окне Диспетчер параметризации выберите деталь, которую хотите использовать, из списка
доступные компоненты.
Для получения дополнительной информации о предварительной параметризации и списка доступных
компоненты, см. Список предварительно параметризованных компонентов.
Список предварительно параметризованных компонентов.
Моделирование тепловых эффектов
Вы можете выставить тепловой порт для моделирования эффектов потерь, которые преобразуют мощность в тепло.
Чтобы открыть термальный порт, установите Опция моделирования Параметр:
Для получения дополнительной информации об использовании тепловых портов в блоках привода см. Моделирование тепловых эффектов в приводах вращения и поступательного движения.
Регулятор скорости/крутящего момента Vari Speed R400 на Fife Pearce Electric
| Версия шасси | 120 или 240 В переменного тока по выбору |
| Следите за напряжением | ±10 В постоянного тока |
| Сервис-фактор | 1,0 |
Количество пусков/остановок в минуту (макс. ) при полной нагрузке ) при полной нагрузке | 30 |
| Напряжение сети (1Ø) ±10% | 120 или 240 В переменного тока | (заводская настройка) — 240 В переменного тока |
| Частота сети переменного тока | 50 или 60 Гц |(Заводская установка) — 60 Гц |
| Потенциометр скорости и крутящего момента (1/4 Вт) | 2,5 кОм |
| Удаленный двух- или трехпроводный старт-стоп | Вкл выкл |
| Тахометр на 1000 об/мин | 7 или 20,8 В постоянного тока |
Ток якоря (пост. ток) ток) | 10,8 А |(Заводская настройка) — 10 А |
| Номинальная мощность двигателя при 120 В переменного тока | 1/4 — 1 л.с. |
| Номинальная мощность двигателя при 240 В переменного тока | 1/4 — 2 л.с. | (заводская настройка) — 2 л.с. |
| Напряжение якоря при 120 В переменного тока | 0±100 В постоянного тока |
| Напряжение якоря при 240 В переменного тока | 0±200 В постоянного тока |(Заводская настройка) — 180 В постоянного тока |
| Полевое напряжение при 120 В переменного тока | 100 В постоянного тока |
| Полевое напряжение при 240 В переменного тока (В постоянного тока) | 200 В постоянного тока |
| Ток возбуждения при 120 В переменного тока | (номинал) — 1 А |
| Ток возбуждения при 240 В переменного тока | (номинал) — 1 А |
| Перегрузка на одну минуту | 150 % |(Заводская установка) — 100 % |
Количество пусков/остановов в минуту (макс. ) при изменении скорости 100 % ) при изменении скорости 100 % | ±12 |
| Регенеративный (четырехквадрантный) контроль | Рекуперативные приводы постоянного тока способны обеспечить полное управление скоростью и крутящим моментом двигателя постоянного тока одновременно. Рекуперативный привод способен создавать крутящий момент либо в режиме торможения, либо в двигательном режиме, при этом скорость двигателя поддерживается в постоянном направлении вращения. Способность обеспечивать тормозной момент является результатом способности привода работать во всех четырех квадрантах кривой скорости/крутящего момента двигателя, как описано в примере ниже. Способность привода постоянного тока с четырьмя квадрантами работать в рекуперативном режиме в первую очередь обеспечивается за счет дополнительной силовой части, включенной в проект. |
| Ускорение вперед | 0 — 150 % |(Заводская установка) — 100 % |
| Скорость обратного ускорения | 0 — 150 % |(Заводская установка) — 100 % |
| Минимальная скорость/крутящий момент | (Заводская установка) — 50 % |
| Максимальная скорость/крутящий момент | (Заводская установка) — 12 % | 0 — 25 % |
| Ограничение прямого тока | Продукты питания и напитки Машины и погрузочно-разгрузочные работы Упаковка и химикаты |
| Ограничение обратного тока | Отличные характеристики регулирования Быстродействующий предел тока Запускает вращающийся двигатель с частотой 50 или 60 Гц по выбору Обеспечивает нагрузку 150 % в течение одной минуты Двух- и трехпроводный пуск-стоп Функция отключения. |
| Динамика регулирования петли | Блок с несколькими номиналами — Один блок можно использовать для работы от 1/4 до 2 л.с. с двигателями постоянного тока с постоянными магнитами или обмоткой возбуждения при напряжении 120 или 240 В переменного тока. надлежащее управление двигателем в соответствии с требованиями приложения Отличные характеристики регулирования — Улучшает работу системы в целом Быстродействующий предел тока — Может быстро реагировать и компенсировать изменения нагрузки оборудования Выход сигнала тревоги — Обеспечивает удаленную индикацию нежелательной ситуации Индикаторы состояния — Визуальная индикация основного состояния управления. Допустимая нагрузка 150% — Дополнительная мощность для кратковременных перегрузок. |
| Стандартные размеры отверстия ступицы | (Y) — 110/220В, 50Гц|(U) — 230/460В, 60Гц или 190/380В, 50Гц|(5) — 208-230/460В, 60Гц|(R) — 115/230В, 60 Гц|(Т) – 220/440В, 60 Гц|(Х) – 115/208-230В, 60 Гц|(П) – 575В, 60 Гц |
| Стандартные размеры отверстия ступицы | (Y) — 110/220В, 50Гц|(U) — 230/460В, 60Гц или 190/380В, 50Гц|(5) — 208-230/460В, 60Гц|(R) — 115/230В, 60 Гц|(Т) – 220/440В, 60 Гц|(Х) – 115/208-230В, 60 Гц|(П) – 575В, 60 Гц |
| Стандартные размеры отверстия ступицы | (Y) — 110/220 В, 50 Гц | (U) — 230/460 В, 60 Гц или 190/380В, 50 Гц|(5) — 208-230/460В, 60 Гц|(R) — 115/230В, 60 Гц|(T) — 220/440В, 60 Гц|(X) — 115/208- 230В, 60Гц|(П) — 575В, 60Гц |
| Стандартные размеры отверстия ступицы | (Y) — 110/220В, 50Гц|(U) — 230/460В, 60Гц или 190/380В, 50Гц|(5) — 208-230/460В, 60Гц|(R) — 115/230В, 60 Гц|(Т) – 220/440В, 60 Гц|(Х) – 115/208-230В, 60 Гц|(П) – 575В, 60 Гц |
| Стандартные размеры отверстия ступицы | (Y) — 110/220В, 50Гц|(U) — 230/460В, 60Гц или 190/380В, 50Гц|(5) — 208-230/460В, 60Гц|(R) — 115/230В, 60 Гц|(Т) – 220/440В, 60 Гц|(Х) – 115/208-230В, 60 Гц|(П) – 575В, 60 Гц |
| Стандартные размеры отверстия ступицы | (Y) — 110/220В, 50Гц|(U) — 230/460В, 60Гц или 190/380В, 50Гц|(5) — 208-230/460В, 60Гц|(R) — 115/230В, 60 Гц|(Т) – 220/440В, 60 Гц|(Х) – 115/208-230В, 60 Гц|(П) – 575В, 60 Гц |
| Квадрант I (двигатель прямого вращения, крутящий момент вперед) | Когда лифт ускоряется в направлении вверх, крутящий момент и скорость имеют одинаковое направление. |
| Квадрант II (крутящий момент при обратном вращении двигателя вперед) | Когда лифт замедляется в направлении вниз, скорость лифта также снижается, но крутящий момент действует в противоположном направлении и тормозит скорость лифта. Энергия движения от лифта, двигателя и гравитации регенерируется обратно в линию электропередач. |
| Квадрант III (Обратное вращение двигателя, обратный крутящий момент) | Когда лифт ускоряется (быстрее, чем сила тяжести) в направлении вниз, крутящий момент и скорость имеют одинаковое направление. |
| Квадрант IV (двигатель прямого вращения, обратный крутящий момент) | Когда лифт замедляется в направлении вверх, скорость лифта все еще увеличивается, крутящий момент направлен в противоположном направлении и тормозит скорость лифта. |
| Ускорение вперед | 0,15–8 с | (заводская установка) — 4 с |
| Скорость обратного ускорения | 0,15–8 с | (заводская установка) — 4 с |
| Минимальная скорость/крутящий момент | 0 — 50 % |(Заводская установка) — 0 % |
| Максимальная скорость/крутящий момент | 50 — 110 % |(Заводская настройка) — 100 % |
| Ограничение прямого тока | 0 — 150 % |(Заводская установка) — 100 % |
| Ограничение обратного тока | 0 — 150 % |(Заводская установка) — 100 % |
| Динамика регулирования петли | (Заводская установка) — 50 % |
| Компенсация ИК | (Заводская установка) — 12 % | 0 — 25 % |
| Приложения | Продукты питания и напитки Машины и погрузочно-разгрузочные работы Упаковка и химикаты |
| Функции | Отличные характеристики регулирования Быстродействующий предел тока Запускает вращающийся двигатель с частотой 50 или 60 Гц по выбору Обеспечивает нагрузку 150 % в течение одной минуты Двух- и трехпроводный пуск-стоп Функция отключения. |
| Стандартные функции продукта и преимущества применения | Блок с несколькими номиналами — Один блок можно использовать для работы от 1/4 до 2 л.с. с двигателями постоянного тока с постоянными магнитами или обмоткой возбуждения при напряжении 120 или 240 В переменного тока. надлежащее управление двигателем в соответствии с требованиями приложения Отличные характеристики регулирования — Улучшает работу системы в целом Быстродействующий предел тока — Может быстро реагировать и компенсировать изменения нагрузки оборудования Выход сигнала тревоги — Обеспечивает удаленную индикацию нежелательной ситуации Индикаторы состояния — Визуальная индикация основного состояния управления. Допустимая нагрузка 150% — Дополнительная мощность для кратковременных перегрузок. |
 Четыре дополнительных устройства SCR используются по сравнению со стандартным преобразователем NEMA Code K-типа. Эти четыре дополнительных компонента позволяют полностью контролировать как напряжение, так и ток, подаваемый на якорь двигателя постоянного тока, тем самым контролируя как скорость, так и крутящий момент.
Четыре дополнительных устройства SCR используются по сравнению со стандартным преобразователем NEMA Code K-типа. Эти четыре дополнительных компонента позволяют полностью контролировать как напряжение, так и ток, подаваемый на якорь двигателя постоянного тока, тем самым контролируя как скорость, так и крутящий момент.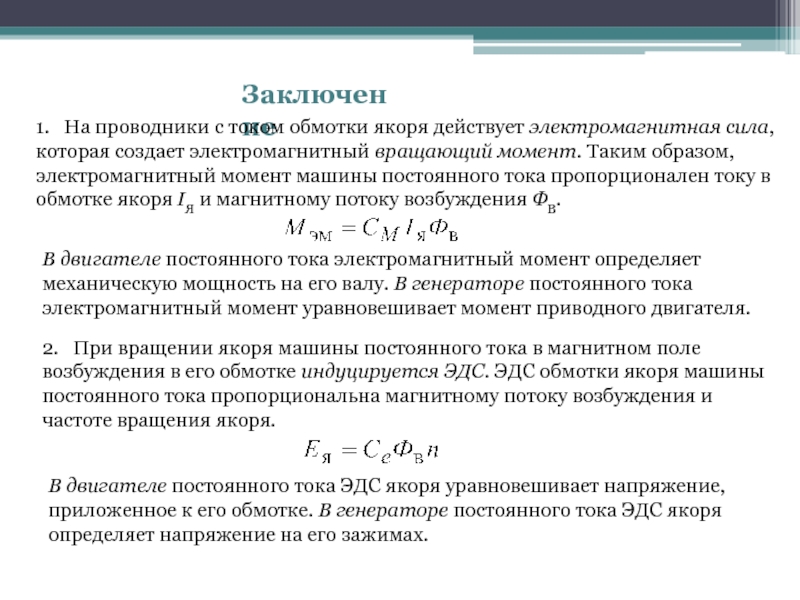
 Энергия движения от лифта и двигателя регенерируется обратно в линию электропередач.
Энергия движения от лифта и двигателя регенерируется обратно в линию электропередач.
Vari Speed® R400 представляет собой двухполупериодный рекуперативный регулятор постоянного тока, который обеспечивает высокоэффективное четырехквадрантное управление скоростью и крутящим моментом.