Содержание
Синхронный электродвигатель с обмоткой возбуждения
Дмитрий Левкин
- Конструкция
- Принцип работы
- Синхронная скорость
- Прямой запуск
- Выход из синхронизма
- Синхронный компенсатор
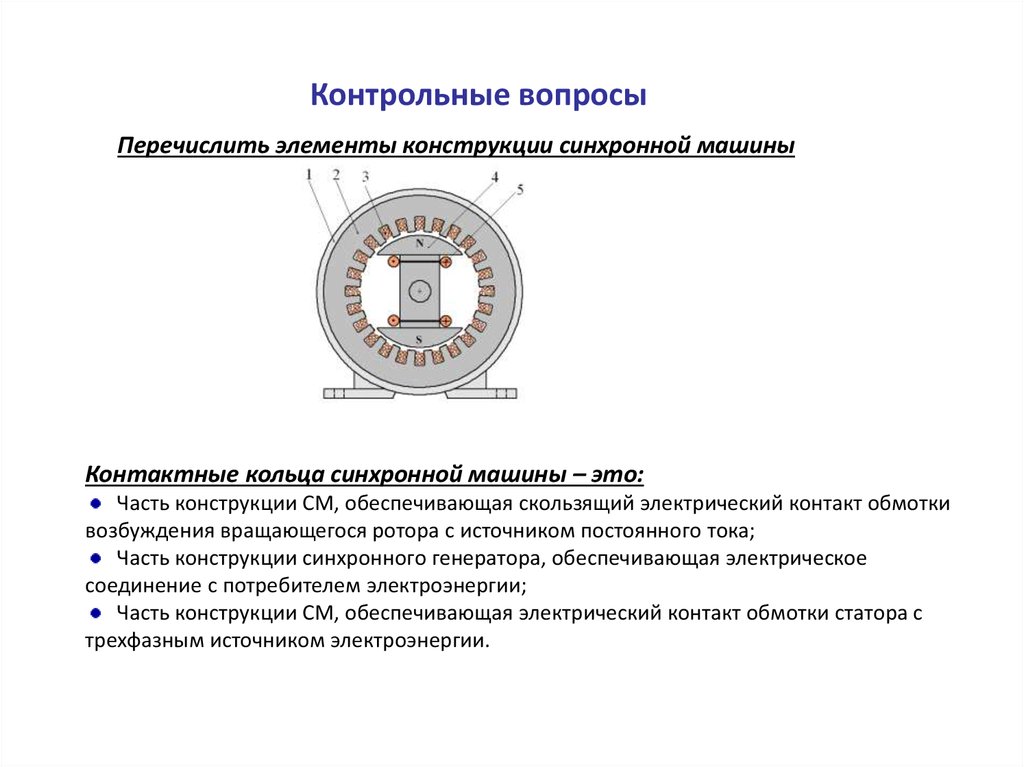
Синхронный электродвигатель с обмоткой возбуждения, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть. Статор обычно имеет стандартную трехфазную обмотку, а ротор выполнен с обмоткой возбуждения. Обмотка возбуждения соединена с контактными кольцами к которым через щетки подходит питание.
Синхронный электродвигатель с обмоткой возбуждения (щетки не показаны)
Постоянная скорость вращения синхронного электродвигателя достигается за счет взаимодействия между постоянным и вращающимся магнитным полем. Ротор синхронного электродвигателя создает постоянное магнитное поле, а статор – вращающееся магнитное поле.
Работа синхронного электродвигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора
Статор: вращающееся магнитное поле
На обмотки катушек статора подается трехфазное переменное напряжение. В результате создается вращающееся магнитное поле, которое вращается со скоростью пропорциональной частоте питающего напряжения. Подробнее о том, как посредством трехфазного напряжения питания образуется вращающееся магнитное поле можно прочитать в статье «Трехфазный асинхронный электродвигатель».
Взаимодействие между вращающимся (у статора) и постоянным (у ротора) магнитными полями
Ротор: постоянное магнитное поле
Обмотка ротора возбуждается источником постоянного тока через контактные кольца. Магнитное поле создаваемое вокруг ротора возбуждаемое постоянным током показано ниже. Очевидно, что ротор ведет себя как постоянный магнит, так как имеет такое же магнитное поле (в качестве альтернативы можно представить, что ротор сделан из постоянных магнитов). Рассмотрим взаимодействие ротора и вращающегося магнитного поля. Предположим вы придали ротору начальное вращение в том же направлении как у вращающегося магнитного поля. Противоположные полюса вращающегося магнитного поля и ротора будут притягиваться друг к другу и они будут сцепляться с помощью магнитных сил. Это значит, что ротор будет вращаться с той же скоростью, что и вращающееся магнитное поле, то есть ротор будет вращаться с синхронной скоростью.
Рассмотрим взаимодействие ротора и вращающегося магнитного поля. Предположим вы придали ротору начальное вращение в том же направлении как у вращающегося магнитного поля. Противоположные полюса вращающегося магнитного поля и ротора будут притягиваться друг к другу и они будут сцепляться с помощью магнитных сил. Это значит, что ротор будет вращаться с той же скоростью, что и вращающееся магнитное поле, то есть ротор будет вращаться с синхронной скоростью.
Магнитные поля ротора и статора сцепленные друг с другом
Скорость с которой вращается магнитное поле может быть вычислена по следующему уравнению:
,
- где Ns – частота вращения магнитного поля, об/мин,
- f – частота тока статора, Гц,
- p – количество пар полюсов.
Это значит, что скорость синхронного электродвигателя может очень точно контролироваться изменением частоты питающего тока. Таким образом эти электродвигатели подходят для высокоточных приложений.
Почему синхронные электродвигатели не запускаются от электрической сети?
Если ротор не имеет начального вращения, ситуация отличается от описанной выше. Северный полюс магнитного поля ротора будет притягиваться к южному полюсу вращающегося магнитного поля, и начнет двигаться в том же направлении. Но так как ротор имеет определенный момент инерции, его стартовая скорость будет очень низкой. За это время южный полюс вращающегося магнитного поля будет замещен северным полюсом. Таким образом появятся отталкивающие силы. В результате чего ротор начнет вращаться в обратную сторону. Таким образом ротор не сможет запуститься.
Демпферная обмотка — прямой запуск синхронного двигателя от электрической сети
Чтобы реализовать самозапуск синхронного электродвигателя без системы управления между наконечниками ротора размещается «беличья клетка», которая также называется демпферной обмоткой. При запуске электродвигателя катушки ротора не возбуждаются. Под действием вращающегося магнитного поля, индуцируется ток в витках «беличьей клетки» и ротор начинает вращаться подобно тому, как запускаются асинхронные двигатели.
Когда ротор достигает своей максимальной скорости, подается питание на обмотку возбуждения ротора. В результате, как говорилось ранее, полюса ротора сцепляются с полюсами вращающегося магнитного поля и ротор начинает вращаться с синхронной скоростью. При вращении ротора с синхронной скоростью, относительное движение между белечьей клеткой и вращающимся магнитным полем равно нулю. Это значит, что отсутствует ток в короткозамкнутых витках, а следовательно «беличья клетка» не оказывает воздействия на синхронную работу электродвигателя.
Синхронные электродвигатели имеют постоянную скорость независящую от нагрузки (при условии что нагрузка не превышает макимально допустимую). Если момент нагрузки больше, чем момент создаваемый самим электродвигателем, то он выйдет из синхронизма и остановиться. Низкое напряжение питания и низкое напряжение возбуждения также могут быть причинами выхода двигателя из синхронизма.
Синхронные электродвигатели могут также использоваться для улучшения коэффициента мощности системы.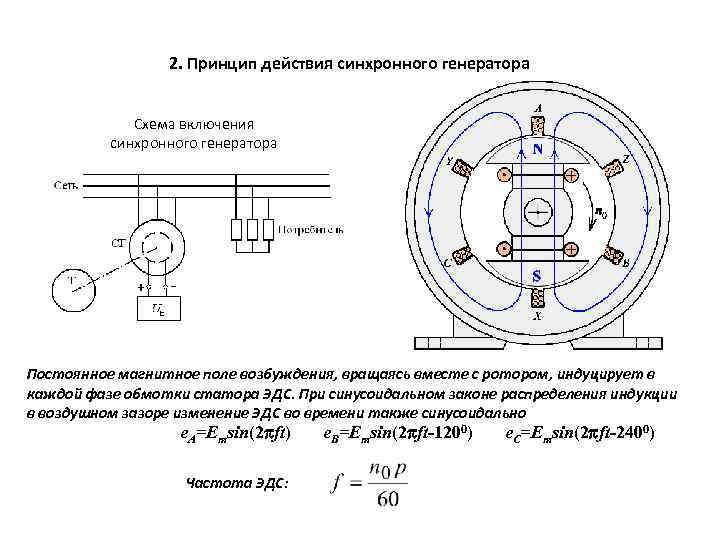 Когда единственной целью использования синхронных электродвигателей является улучшение коэффициента мощности их называют синхронными компенсаторами. В таком случае вал электродвигателя не соединяется с механической нагрузкой и вращается свободно.
Когда единственной целью использования синхронных электродвигателей является улучшение коэффициента мощности их называют синхронными компенсаторами. В таком случае вал электродвигателя не соединяется с механической нагрузкой и вращается свободно.
устройство, принцип работы, режимы работы, пуск
В качестве устройства преобразования электрической энергии в механическую в промышленности и быту используется синхронный электродвигатель. В сравнении с другими типами электрических машин он получил меньшее распространение, но в отведенных сферах является незаменимым фаворитом. В чем особенность синхронных агрегатов и как их применяют на практике, мы рассмотрим в данной статье.
Устройство
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
Рис. 1. Устройство синхронного электродвигателя
1. Устройство синхронного электродвигателя
- Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
- Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.
- Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора. В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
- Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке.
 В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы. - Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
- Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.
 В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.Принцип работы
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
Рис. 2. Принцип действия синхронного электродвигателя
Как видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле.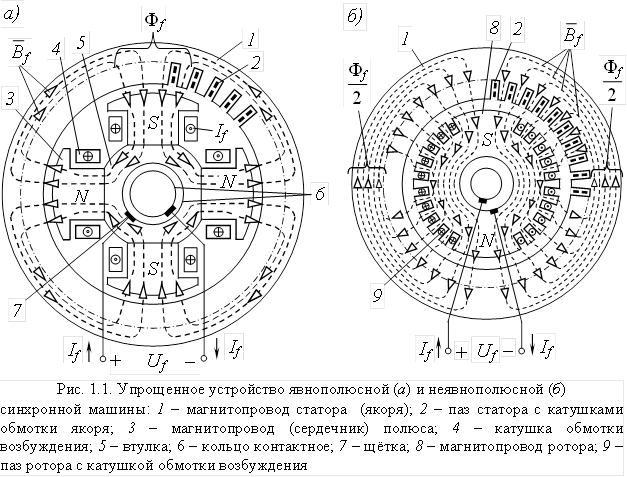 На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
Рис. 3. Принцип формирования потоков в синхронной электрической машине
При подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
- в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.
- в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
- в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.

Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2.722-68.
Рис. 4. Схематическое обозначение синхронного электродвигателя
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение.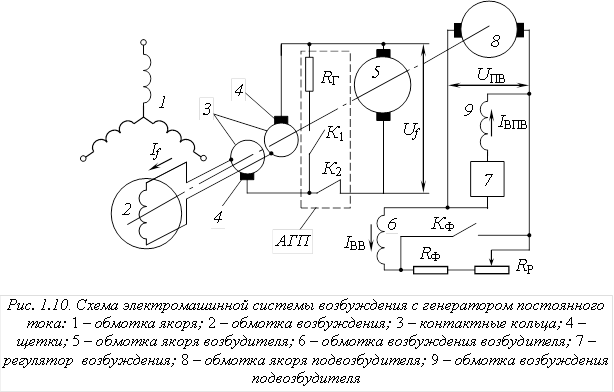 У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.
В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
Рис. 5. Отличие асинхронного от синхронного электродвигателя
Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
Рис. 6. Синхронный электродвигатель с постоянными магнитами
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см. рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
Рис. 7. Пример реактивного ротора
В зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
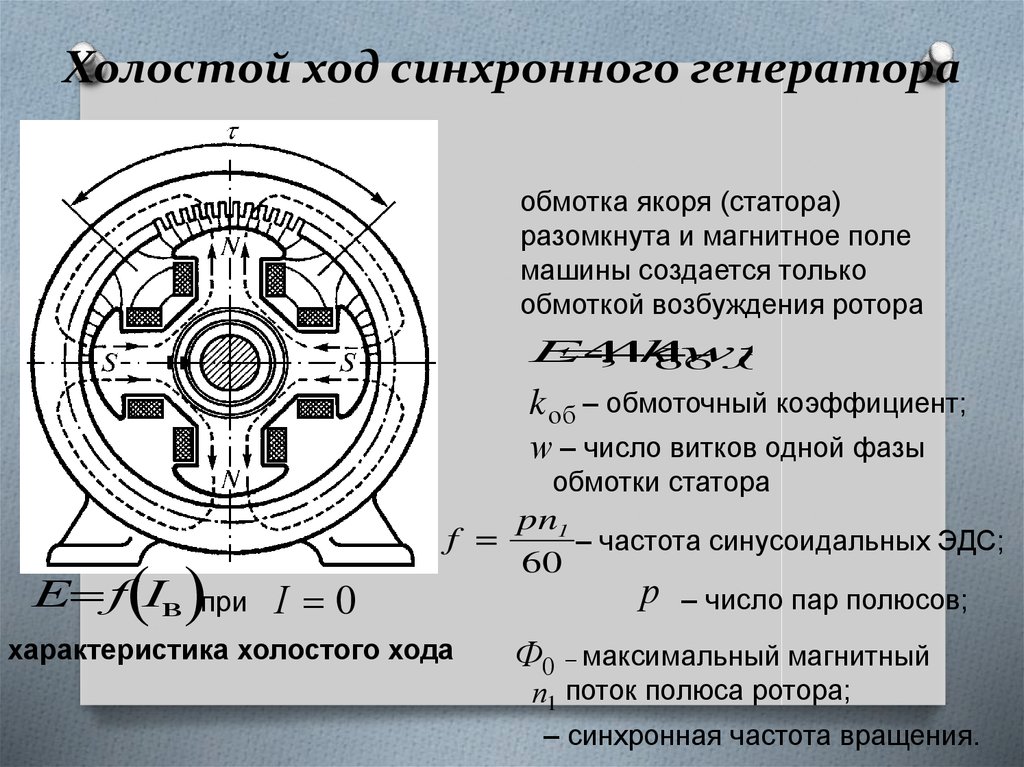
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1. На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.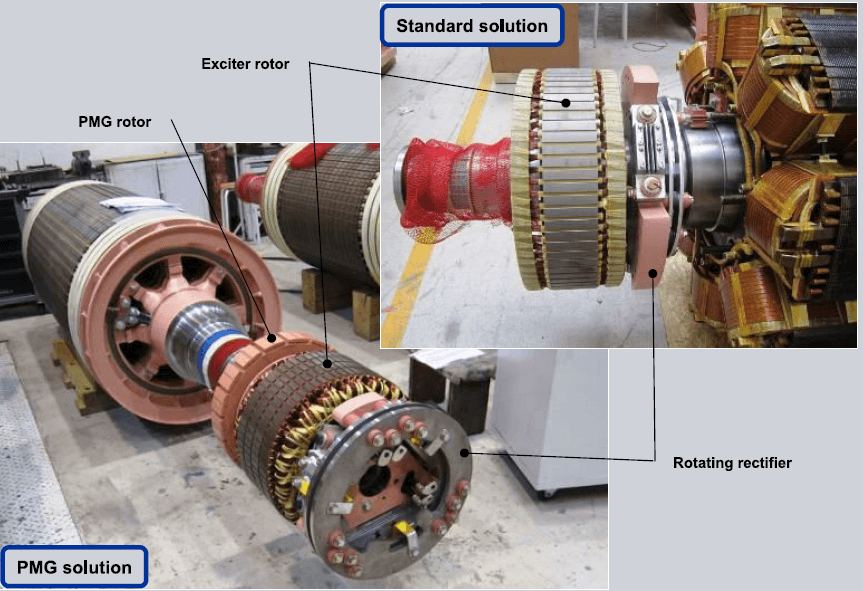
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
- высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
- более высокая механическая прочность за счет особенностей конструкции электродвигателя;
- зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
- на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
- может применяться для уменьшения реактивной составляющей в сети.
Среди недостатков синхронных электродвигателей выделяют:
- сложную конструкцию;
- более сложный пуск;
- необходимость использования вспомогательных устройств и блоков;
- такие электродвигатели сложнее регулировать по числу оборотов;
- ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.

Видео версия
Библиографический список
- Ю.А. Макаричев, В.Н. Овсянников «Синхронные машины» 2010
- Абрамович Б.Н., Круглый А.А. «Возбуждение, регулирование и устойчивость синхронных двигателей» 1983
- Андреева Е.Г., Морозова Н.С. «Синхронные машины» 2015
- Глебов И.А. «Проблемы пуска сверхмощных синхронных маши» 1988
- Емец В.Ф., Попков А.А., Петров Г.А. «Синхронные электрические машины» 2009
- Кислицын А.Л. «Синхронные машины» 2000
Что такое система возбуждения?
ЧТО ТАКОЕ СИСТЕМА ВОЗБУЖДЕНИЯ?
ВВЕДЕНИЕ
1. ОСНОВНАЯ ФУНКЦИЯ
Основной функцией системы возбуждения является подача постоянного (постоянного) тока на обмотку возбуждения синхронной машины. Это достигается за счет использования управления с обратной связью (или управления с обратной связью). Современные системы возбуждения также включают в себя функции диагностики для упрощения поиска и устранения неисправностей, протоколы связи для интеграции SCADA и функции ограничения/защиты, гарантирующие, что синхронная машина работает в пределах своей кривой возможностей.
Это достигается за счет использования управления с обратной связью (или управления с обратной связью). Современные системы возбуждения также включают в себя функции диагностики для упрощения поиска и устранения неисправностей, протоколы связи для интеграции SCADA и функции ограничения/защиты, гарантирующие, что синхронная машина работает в пределах своей кривой возможностей.
2. ЦЕЛЬ
Назначение системы возбуждения зависит от применения:
- Для синхронных генераторов она отвечает за поддержание постоянного напряжения на клеммах .
- Для синхронных двигателей отвечает за поддержание постоянного коэффициента мощности .
3. ПРИНЦИП РАБОТЫ
Синхронная машина, состоящая из ротора и статора, производит переменный ток, используя принцип электромагнитной индукции. Постоянный ток, проходящий через обмотку возбуждения ротора, создает статическое магнитное поле. Поскольку ротор вращается первичным двигателем (например, гидро- или паровой турбиной), магнитное поле также вращается. Поскольку ротор находится внутри статора, вращающееся магнитное поле создает переменный магнитный поток, пересекая обмотки статора. Этот переменный магнитный поток индуцирует переменные токи в обмотках статора синхронной машины. Система возбуждения необходима, так как без тока возбуждения машина работает без тока возбуждения и, следовательно, в обмотках статора машины не генерируется (индуцируется) напряжение.
Поскольку ротор вращается первичным двигателем (например, гидро- или паровой турбиной), магнитное поле также вращается. Поскольку ротор находится внутри статора, вращающееся магнитное поле создает переменный магнитный поток, пересекая обмотки статора. Этот переменный магнитный поток индуцирует переменные токи в обмотках статора синхронной машины. Система возбуждения необходима, так как без тока возбуждения машина работает без тока возбуждения и, следовательно, в обмотках статора машины не генерируется (индуцируется) напряжение.
ПОНЯТИЯ СИСТЕМЫ ВОЗБУЖДЕНИЯ
1. ЗАМКНУТЫЙ КОНТУР УПРАВЛЕНИЯ
Системы возбуждения используют замкнутый контур или управление с обратной связью для регулирования производительности машины. При управлении с обратной связью выходной сигнал машины направляется обратно в контроллер и сравнивается с заданным значением, а ошибка между заданным значением и выходным сигналом используется для вычисления реакции системы. Контроллер обычно моделируется как ПИД-, ПИ-регулятор или регулятор опережения-запаздывания.
Контроллер обычно моделируется как ПИД-, ПИ-регулятор или регулятор опережения-запаздывания.
Контур управления Reivax совместим с Модель ST4C , определенная в IEEE 421.5. Упрощенная версия этого контура управления показана на экране ЧМИ Reivax:
Параметры настройки, связанные с контуром управления, можно легко изменить непосредственно с ЧМИ. Три (3) набора параметров настройки позволяют настроить оптимальную реакцию для случая, когда генератор не подключен к сети, и для режима подключения к сети в зависимости от того, активен или нет стабилизатор энергосистемы (PSS):
Пример схемы полного контура управления показано ниже:
2. ОГРАНИЧИТЕЛИ И ЗАЩИТЫ
Современные системы возбуждения отвечают за защиту синхронной машины, самой системы возбуждения и других устройств. Ограничители (OEL, UEL, VHz, SCL) и защиты (24, 27, 32, 37F, 40/32Q, 50/51, 59, 59F, 76F, 81O/U) — это программные функции, предназначенные для ограничения работы машины в нежелательных условиях. условиях и реализованы как дополнения к контуру управления AVR. Ограничители обеспечивают постоянную работу машины в пределах возможностей машины, а функции защиты защищают машину, инициируя отключение. Защитные функции возбуждения обычно дублируются в отдельном блоке реле защиты. Можно отключить функции защиты возбуждения и полагаться только на реле защиты агрегата или можно использовать обе функции защиты, и в этом случае необходимо обеспечить координацию между двумя функциями защиты.
условиях и реализованы как дополнения к контуру управления AVR. Ограничители обеспечивают постоянную работу машины в пределах возможностей машины, а функции защиты защищают машину, инициируя отключение. Защитные функции возбуждения обычно дублируются в отдельном блоке реле защиты. Можно отключить функции защиты возбуждения и полагаться только на реле защиты агрегата или можно использовать обе функции защиты, и в этом случае необходимо обеспечить координацию между двумя функциями защиты.
Наиболее распространенные ограничители и их функции приведены ниже:
2.1. ОГРАНИЧИТЕЛЬ ПЕРЕВОЗБУЖДЕНИЯ (OEL)
Для систем возбуждения производства Reivax ограничители можно легко настроить с помощью ЧМИ. Упрощенная функция передачи и экран конфигурации для OEL, показанные ниже, соответствуют IEEE 421.5 OEL2C. OEL сконфигурирован как кривая обратной зависимости от времени в соответствии с IEEE/ANSI C50.13.
2.2. ОГРАНИЧИТЕЛЬ ПРИ ВОЗБУЖДЕНИИ (ОПВ)
Упрощенная функция передачи и экран конфигурации для UEL показаны ниже. UEL настраивается как кусочно-линейная характеристика в области недовозбуждения (отрицательная реактивная мощность) кривой производительности согласно IEEE 421.5 UEL2C.
UEL настраивается как кусочно-линейная характеристика в области недовозбуждения (отрицательная реактивная мощность) кривой производительности согласно IEEE 421.5 UEL2C.
3. КООРДИНАЦИЯ ЗАЩИТЫ
Координация между ограничителями, ограничителями оборудования и внешними реле защиты является важным аспектом правильной интеграции системы возбуждения. Как правило, согласование выполняется в рамках исследования защиты или проверки модели, при этом настройки проверяются во время ввода оборудования в эксплуатацию.
Во время ввода в эксплуатацию OEL рисуется таким образом, чтобы он перекрывал тепловой предел ротора IEEE/ANSI C50.13.
4. КРИВАЯ ПРОИЗВОДИТЕЛЬНОСТИ
Кривая производительности синхронной машины представляет собой графическое представление рабочих пределов машины. Кривая производительности представляет собой график зависимости активной мощности машины (МВт) от реактивной мощности (МВар). Обычно представлены следующие физические рабочие пределы:
- Тепловой предел ротора
- Предел турбины
- Практический предел устойчивости
- Ограничение асинхронного хода
Кроме того, обычно представлены следующие ограничители:
- Ограничитель перевозбуждения (OEL)
- Ограничитель пониженного возбуждения (UEL)
Системы возбуждения производства Reivax включают кривую динамической производительности, которую можно использовать для мониторинга рабочих условий в режиме реального времени. Пример такой кривой возможностей показан ниже.
Пример такой кривой возможностей показан ниже.
Кривая возможностей показывает безопасную рабочую область машины, обозначенную зеленым цветом, ограниченную ограничителями и физическими пределами машины. Он также показывает рабочую точку машины с точки зрения активной и реактивной мощности (обе величины показаны в pu).
5. СТАБИЛИЗАТОР СИСТЕМЫ ПИТАНИЯ (PSS)
Стабилизатор системы питания (PSS) является дополнением к контуру управления системы возбуждения, которое повышает устойчивость системы за счет компенсации низкочастотных (0-5 Гц) колебаний. в системе питания. Это приводит к более стабильной выходной мощности генератора, что может привести к значительной экономии за счет снижения потерь мощности. Стабилизаторы энергосистем обеспечивают превосходную экономическую эффективность и, как было установлено, приносят миллионы долларов ежегодной выгоды для крупных коммунальных предприятий.
Выход PSS добавлен в контур управления AVR. На изображении ниже показан суммирующий переход PSS в том виде, в котором он появляется в передаточной функции системы возбуждения Reivax.
На изображении ниже показан суммирующий переход PSS в том виде, в котором он появляется в передаточной функции системы возбуждения Reivax.
На приведенном ниже графике показана реакция генератора коммунального масштаба мощностью 32,5 МВт с PSS и без него. Возмущение вводится на 2-й и 12-й секундных отметках. Заметно улучшена переходная и стационарная стабильность. Без ФПС колебания продолжаются около 10 секунд после возмущения, тогда как при включении ФПС они практически сразу затухают.
Reivax PSS совместим с моделями IEEE PSS2A и PSS2B .
ТИПЫ СИСТЕМ ВОЗБУЖДЕНИЯ
За прошедшие годы в электроэнергетике появились различные типы систем возбуждения. Они подразделяются на две основные категории в зависимости от источника питания: вращающиеся возбудители и статические возбудители.
1. ВРАЩАЮЩИЕСЯ СИСТЕМЫ ВОЗБУЖДЕНИЯ
В вращающихся системах возбуждения имеется два возбудителя: основной возбудитель и вспомогательный возбудитель. Главный возбудитель питает пилотный возбудитель, а пилотный возбудитель, в свою очередь, напрямую питает синхронную машину. Существует две подкатегории вращающихся систем возбуждения: переменного и постоянного тока.
Главный возбудитель питает пилотный возбудитель, а пилотный возбудитель, в свою очередь, напрямую питает синхронную машину. Существует две подкатегории вращающихся систем возбуждения: переменного и постоянного тока.
1.1. БЕСЩЕТОЧНЫЙ ВОЗБУЖДАТЕЛЬ ПЕРЕМЕННОГО ТОКА
В системе возбуждения переменного тока основной силовой выпрямитель питает промежуточный возбудитель переменного тока. Этот возбудитель переменного тока содержит внутренний силовой выпрямитель, который питает обмотку возбуждения синхронной машины.
Ниже показана однолинейная схема вращающегося возбудителя переменного тока.
1.2. ВОЗБУДИТЕЛЬ ПОСТОЯННОГО ТОКА
В системе возбуждения постоянного тока силовой выпрямитель питает промежуточный возбудитель постоянного тока, который, в свою очередь, питает обмотку возбуждения синхронной машины.
Ниже показана однолинейная схема вращающегося возбудителя постоянного тока.
2. СТАТИЧЕСКИЕ СИСТЕМЫ ВОЗБУЖДЕНИЯ – ТЕРМИНАЛ-ФЭД
СТАТИЧЕСКИЕ СИСТЕМЫ ВОЗБУЖДЕНИЯ – ТЕРМИНАЛ-ФЭД
В статических системах возбуждения силовой выпрямитель напрямую питает обмотку возбуждения синхронной машины. Пилотного возбудителя нет.
Система статического возбуждения питается от терминала (также называемого питанием от шины), когда питание берется от самой машины через силовой трансформатор напряжения (PPT). Первичная часть PPT подключена к статору машины, а вторичная подает питание на выпрямитель.
Системы статического возбуждения не являются самовозбуждающимися по своей природе, поэтому им требуется внешний источник питания для быстрого запуска процесса возбуждения и создания достаточного магнитного потока. Этот процесс называется миганием поля .
2.1. ПРЕИМУЩЕСТВА СТАТИЧЕСКИХ СИСТЕМ ВОЗБУЖДЕНИЯ
Статические системы возбуждения обладают рядом преимуществ, которые делают их привлекательным вариантом для управления синхронными машинами:
- Простая, надежная и экономичная конструкция
- Минимальные требования к обслуживанию
- Высокая производительность и быстрый отклик
2. 2. ОСНОВНЫЕ КОМПОНЕНТЫ
2. ОСНОВНЫЕ КОМПОНЕНТЫ
Основные компоненты системы статического возбуждения перечислены ниже:
2.2.1. АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ (АРН)
Автоматический регулятор напряжения (АРН), широко известный просто как регулятор напряжения, выполняет все функции управления системой, включая следующие:
- Выключатели
- Отправка импульсов запуска на мосты
- Реагирование на команды оператора или нарушения сети
- Мониторинг операций ввода-вывода системы и принятие соответствующих мер в ответ на них
- Поддержание системы возбуждения в пределах безопасности и стабильности за счет использования ограничителей и защит
- Выдача уведомлений в систему SCADA завода при возникновении аномальных условий
- Отключение системы возбуждения при возникновении критического отказа или опасного состояния
Основные элементы АРН:
- Контур управления
- Ограничители
- Стабилизатор системы питания
Решения по управлению с резервированием широко распространены. В конфигурации с резервированием имеется два регулятора напряжения, один из которых выполняет функции управления, а другой находится в режиме горячего резерва .
В конфигурации с резервированием имеется два регулятора напряжения, один из которых выполняет функции управления, а другой находится в режиме горячего резерва .
2.2.2. СИЛОВОЙ ВЫПРЯМИТЕЛЬ
В системах статического возбуждения обычно используется силовой выпрямитель, который преобразует переменный ток в постоянный и обеспечивает управляемый ток возбуждения для синхронной машины. Силовые выпрямители обычно используют тиристорную или IGBT-технологию.
Тепловыделение является проблемой для силового выпрямителя. Для мостового охлаждения обычно предоставляются резервные комплекты вентиляторов.
Конфигурации моста с резервированием являются общими. В случае наличия нескольких мостов система возбуждения выполнит выравнивание тока , чтобы сбалансировать выходы моста.
2.2.3. ИНТЕРФЕЙС ПРЕОБРАЗОВАТЕЛЯ
Интерфейс преобразователя состоит из всех промежуточных устройств между контроллером и силовым выпрямителем. Он преобразует сигнал управления в импульсы запуска и изолирует управляющую электронику от силовой части.
Он преобразует сигнал управления в импульсы запуска и изолирует управляющую электронику от силовой части.
В системах возбуждения производства Reivax инструменты диагностики для контроля силового выпрямителя предусмотрены на ЧМИ. Состояние вентиляторов, предохранителей и температуры полупроводников можно проверить в режиме реального времени, как показано ниже.
Системы и методы управления возбуждением генератора
Системы возбуждения
Системы возбуждения можно определить как систему, которая подает ток возбуждения на обмотку ротора генератора. Хорошо спроектированные системы возбуждения обеспечивают надежность работы, стабильность и быструю переходную характеристику.
К четырем распространенным методам возбуждения относятся:
- Шунт или самовозбуждение
- Система усиления возбуждения (EBS)
- Генератор с постоянными магнитами (PMG)
- Вспомогательная обмотка (AUX).

Каждый метод имеет свои индивидуальные преимущества. Во всех методах используется автоматический регулятор напряжения (AVR) для подачи постоянного тока на статор возбудителя. Выход переменного тока ротора возбудителя выпрямляется на вход постоянного тока для основного ротора генератора. Более продвинутые системы используют дополнительный вход в AVR. В этой статье будут рассмотрены конструкция, функции и применение каждого метода, а также приведены диаграммы и иллюстрации для каждого из них.
Автоматический регулятор напряжения (АРН)
Конструкция АРН зависит от используемого возбуждения. Все они получают входные данные от статора генератора, когда он вращается. АРН с возможностью получения второго входа для уменьшения или устранения внутренних гармоник, вызванных сигналами обратной связи нагрузки, используются для приложений с нелинейной нагрузкой. Обычно используются два типа:
- Силиконовый управляемый выпрямитель (SCR) — измеряет уровень мощности статора и определяет его срабатывание по напряжению возбудителя. Может вызвать проблемы при использовании с нелинейными нагрузками.
- Полевой транзистор (FET) — воспринимает уровень мощности от статора и преобразует его в сигнал с широтно-импульсной модуляцией (ШИМ) на возбудитель. Этот стиль AVR можно использовать для методов возбуждения. Нелинейные нагрузки не вызывают обратной связи, приводящей к сбоям возбуждения.
 Может вызвать проблемы при использовании с нелинейными нагрузками.
Может вызвать проблемы при использовании с нелинейными нагрузками.Шунт или самовозбуждающийся
Шунтирующий метод отличается простой и экономичной конструкцией для подачи питания на АРН. Этот метод не требует дополнительных компонентов или проводки. При возникновении проблем поиск и устранение неисправностей упрощается за счет меньшего количества компонентов и проводки для проверки.
Когда генератор вращается, статор подает входное напряжение на АРН. Кроме того, АРН имеет датчики, которые контролируют выход статора.
АРН питает возбудитель и выпрямляется до постоянного тока. Ток индуцируется на статоре для выхода нагрузки.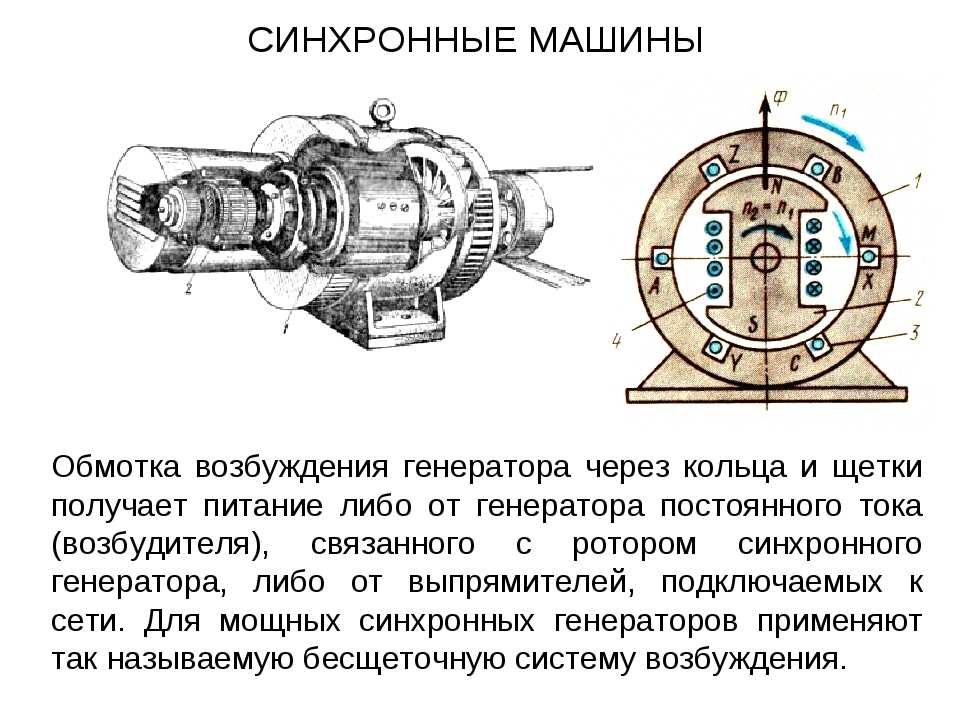
Самым большим недостатком этой системы является то, что на АРН влияет нагрузка, которую питает генератор. Когда нагрузка увеличивается, напряжение начинает уменьшаться, и АРН должен подавать больший ток на возбудитель, чтобы удовлетворить спрос. Это доводит AVR до предела. Если AVR выходит за его пределы, поле возбуждения разрушается. Выходное напряжение уменьшается до небольшой величины.
Если произойдет короткое замыкание в цепи питания АРН, генератор не будет иметь источника возбуждения. Это приводит к потере выходной мощности генератора.
Генераторы с шунтирующим или самовозбуждающимся методом могут использоваться на линейных нагрузках (постоянная нагрузка). Генераторы с этим методом возбуждения не рекомендуются для приложений с нелинейными нагрузками (переменная нагрузка). Гармоники, связанные с нелинейными нагрузками, могут вызвать пробой поля возбуждения.
Система повышения возбуждения (EBS)
Система EBS состоит из одних и тех же основных компонентов, обеспечивающих входы и получающих выходы от AVR. Дополнительными компонентами в этой системе являются:
Дополнительными компонентами в этой системе являются:
- Модуль управления усилением возбуждения (EBC)
- Повышающий генератор возбуждения (EBG).
EBG установлен на ведомом конце генератора. Внешний вид такой же, как у постоянного магнита. EBG подает питание на контроллер при вращении вала генератора.
Модуль управления EBC подключен параллельно к AVR и возбудителю. EBC получает сигнал от AVR. При необходимости контроллер подает на возбудитель различные уровни тока возбуждения, которые зависят от потребностей системы.
Дополнительный источник питания системы возбуждения поддерживает требования к нагрузке. Это позволяет запустить генератор и восстановить напряжение возбуждения.
Эта система возбуждения не рекомендуется для приложений с длительным питанием. Он предназначен для аварийного или резервного питания. Когда генератор запускается, система EBS отключается до тех пор, пока не будет достигнута рабочая скорость.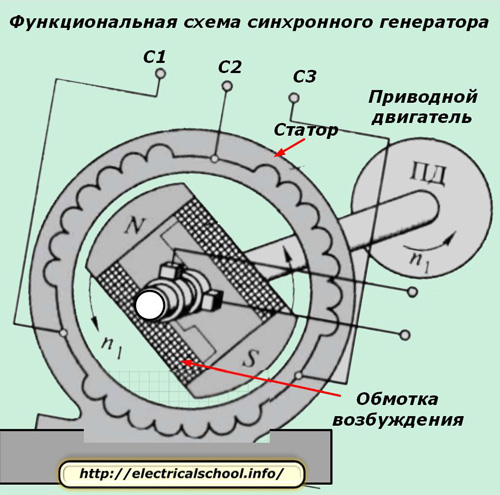 EBG все еще генерирует энергию, но контроллер не распределяет ее.
EBG все еще генерирует энергию, но контроллер не распределяет ее.
Система допускает динамическую реакцию, менее дорогая и соответствует требованиям по обеспечению 300% тока короткого замыкания. Нелинейные нагрузки, такие как запуск двигателя, улучшаются по сравнению с методом шунта или с самовозбуждением.
Генератор на постоянных магнитах (PMG)
Генераторы, оснащенные постоянными магнитами, относятся к наиболее известным методам с раздельным возбуждением. На ведомом конце вала генератора установлен постоянный магнит.
PMG подает изолированное питание на АРН, когда вал генератора вращается. АРН использует дополнительную мощность при питании нелинейных нагрузок, таких как; запуск моторов.
Чистый, изолированный, непрерывный 3-фазный сигнал генерируется при вращении вала генератора.
Некоторые из преимуществ использования генераторов, оснащенных методом возбуждения PMG:
- Поле возбуждения не разрушается, что позволяет устранить устойчивые неисправности короткого замыкания.
- Изменение нагрузки не влияет на поле возбуждения.
- Напряжение создается при первом запуске и не зависит от остаточного магнетизма в поле.
- При пуске двигателя поле возбуждения не разрушается из-за отсутствия питания АРН.
Система PMG увеличивает вес и размер со стороны генератора. Это наиболее часто используемый метод возбуждения для приложений, в которых используются двигатели с пуском и остановом, а также другие нелинейные нагрузки.
Вспомогательная обмотка (AUX)
Метод вспомогательной обмотки используется уже много лет. Область применения варьируется от морского до промышленного применения и более практична в более крупных установках.
В этом методе используется отдельное поле возбуждения, однако в нем не используется компонент, прикрепленный к ведомому концу вала генератора. В этих методах для дополнительного возбуждения используется вращение вала и постоянный магнит или генератор.