Содержание
Сельсины. Виды и режимы работы. Принцип действия и особенности
Во многих технологических процессах в промышленности, а также в системах автоматизации требуется синфазное и синхронное вращение осей, которые не связаны между собой механическим путем. Подобные задачи способны решить системы синхронной связи, которые называются сельсины.
Они обладают способностью самостоятельной синхронизации, и используются в синхронных системах передачи угла вращения на расстоянии в качестве приемников и передатчиков.
Системы синхронной связи делятся на два вида.
Система синхронного вращения
Эта система выполнена на двух равных асинхронных электродвигателях с фазным ротором. Обмотки роторов между собой соединены, а обмотки статора подключены к одной сети переменного трехфазного тока.
Система синхронного поворота
Работа системы основана на специальных микромашинах индукционного вида (сельсинах), которые обладают свойством самосинхронизации.
Сельсины делятся по количеству фаз на два вида:
- Трехфазные сельсины по своей конструкции не имеют отличия от асинхронных электродвигателей. Такие модели не нашли широкого применения в основном из-за разности моментов синхронизации во время поворота ротора.
- Однофазные сельсины имеют устройство, аналогичное конструкции маломощных синхронных машин. Их обмотка возбуждения работает от переменного тока.
Режимы работы
В автоматических системах синхронный поворот производится в двух различных режимах.
Индикаторный режим
На рисунке «а» показана схема индикаторного режима. Ведомая ось О2 соединена с ротором сельсина-приемника «П». Такую схему используют при малой величине момента торможения на ведомой оси, чаще всего, когда на оси закреплена индикаторная стрелка.
Обмотки возбуждения подключены в общей цепи, а обмотки синхронизации объединены линией связи.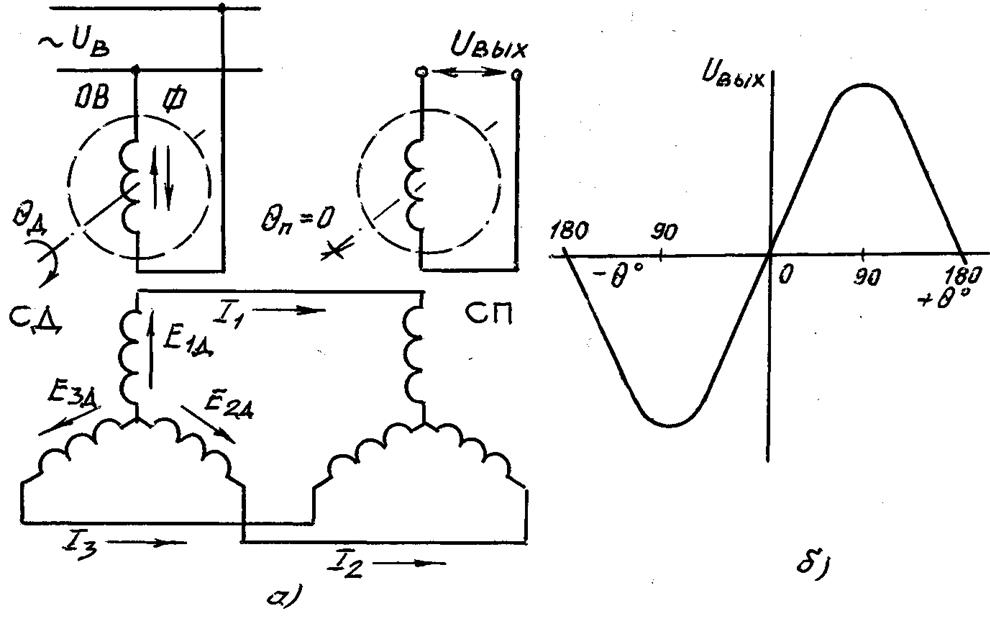 Магнитные потоки, образованные обмотками приемника и датчика, создают в 3-х фазах обмоток электродвижущую силу.
Магнитные потоки, образованные обмотками приемника и датчика, создают в 3-х фазах обмоток электродвижущую силу.
При наличии между роторами угла рассогласования в обмотках возникает ток, который создаст в приемнике и датчике с помощью потока возбуждения моменты разного направления, сводящие к нулю угол рассогласования.
Чаще всего ротор датчика заторможен. Вследствие этого его момент синхронизации действует на механизм поворота ведущей оси. Момент приемника воздействует на ротор и поворачивает его синхронно с ротором датчика на такой же угол.
Трансформаторный режим
Электрический сигнал о рассогласовании роторов поступает на усилитель, а затем на исполнительный мотор, поворачивающий ротор приемника и ведомую ось для устранения рассогласования.
Режим трансформатора используют в таких ситуациях, когда на ведомую ось приложен большой момент торможения, другими словами, для поворота некоторого механизма. В этом режиме обмотка датчика, связанного механическим путем с ведущей осью, подключается к сети питания однофазного тока, а обмотка приемника к усилителю, который подает напряжение на управляющую обмотку исполнительного электрического двигателя. Обмотки синхронизации 2-х сельсинов объединены линией связи.
Обмотки синхронизации 2-х сельсинов объединены линией связи.
Переменный ток образует в обмотке возбуждения датчика импульсы магнитного потока, который создает электродвижущую силу в синхронизирующей обмотке. Обмотки приемника и датчика соединены, поэтому по ним будет проходить ток и в приемнике образуются импульсы магнитного потока.
При наличии рассогласования роторов этот поток создает в возбуждающей обмотке электродвижущую силу, образует на выходе напряжение, которое подается на усилитель, а затем на обмотку статора исполнительного мотора. Вследствие этого ведомая ось поворачивается вместе с ротором приемника. После устранения рассогласования напряжение на выходе обнуляется, и ведомая ось прекращает свое вращение.
В трансформаторном режиме погрешность работы сельсина определяется технологическими и конструктивными особенностями: разбросом параметров приемника и датчика, неравномерностью магнитной проводимости, несимметричностью изготовления обмоток.
Передача угла в этом режиме имеет эксплуатационные погрешности, которые образуются вследствие влияния условий работы на сельсин-приемник. Если изменить сопротивление нагрузки в управляющей цепи обмотки сельсина-приемника, то это отразится на его работе.
Если изменить сопротивление нагрузки в управляющей цепи обмотки сельсина-приемника, то это отразится на его работе.
Схемы, возможные для работы обоих режимов, делятся на три группы:
- Датчик и один приемник.
- Датчик с многими приемниками.
- Один приемник и два датчика.
Конструктивные особенности
Моторы по устройству можно разделить на два вида:
- Контактные с обмоткой ротора, соединенной с внешней цепью с помощью контактных колец и щеток.
- Бесконтактные, не имеющие контактных элементов.
Контактные
Их устройство аналогично конструкции асинхронных маломощных электродвигателей с фазным ротором. Статор (1) и ротор (2) являются неявнополюсными, вследствие чего обе обмотки (3, 4) являются распределенными. Возбуждающая обмотка находится на роторе. Питание к этой обмотке подходит по двум кольцам (5).
Некоторые модели сельсинов выполнены с ротором и статором, имеющим явно выраженные полюсы. Это дает возможность увеличить момент синхронизации. В качестве недостатка контактных видов сельсинов следует назвать наличие контактных элементов (колец).
Это дает возможность увеличить момент синхронизации. В качестве недостатка контактных видов сельсинов следует назвать наличие контактных элементов (колец).
Бесконтактные сельсины
В сельсинах, не имеющих контактных компонентов, обе обмотки находятся на статоре. Ротор выполнен в виде цилиндра (6) из материала с ферромагнитными свойствами. Ротор разделен на два изолированных полюса с помощью алюминиевой прослойкой (7).
С торцов сельсина находятся сердечники в виде тора (1), изготовленные из электротехнической листовой стали. Внутренняя часть поверхности сердечников находится над ротором. К наружной поверхности подходят стержни внешнего магнитопровода (4). 1-фазную обмотку возбуждения изготавливают в виде 2-х дисковых катушек (2), находящихся по разным сторонам статора между сердечниками и обмоткой синхронизации.
В процессе функционирования сельсина импульсный магнитный поток замыкается в магнитной системе. При этом он соединяется с 3-фазной синхронизирующей обмоткой на статоре.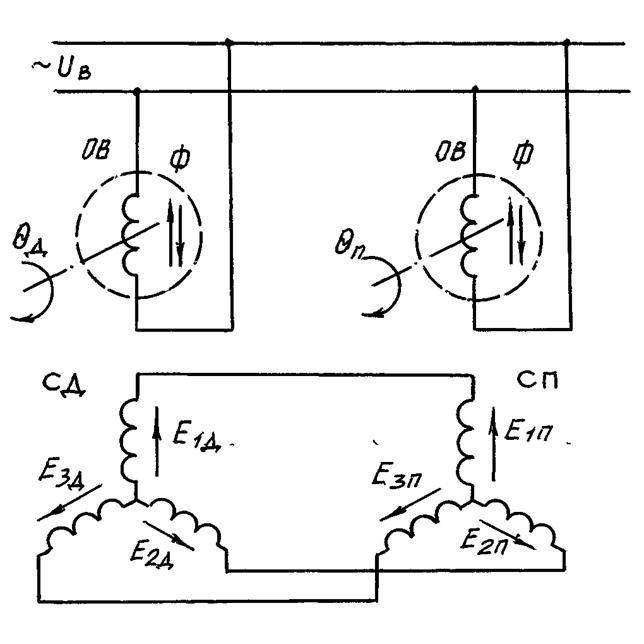 Штриховой линией на рисунке показан путь замыкания магнитного потока.
Штриховой линией на рисунке показан путь замыкания магнитного потока.
Во время поворота ротора меняется позиция оси магнитного потока относительно синхронизирующих обмоток. Вследствие этого электродвижущая сила, возникающая в фазах синхронизирующей обмотки, будет напрямую зависеть от поворота ротора, по аналогии с работой контактных сельсинов.
В качестве недостатка бесконтактных моделей сельсинов можно отметить менее эффективное применение активных материалов. Их вес в 1,5 раза выше контактных конструкций. Это можно объяснить значительными воздушными зазорами. Из-за этого сельсины имеют повышенные токи намагничивания и рассеивающие потоки.
Требования к сельсинам
- Динамическая и статическая точность.
- Способность к самостоятельной синхронизации в диапазоне одного оборота.
- Сохранение заданной точности и свойства самостоятельной синхронизации при повышенных оборотах вращения с несколькими приемниками.
Похожие темы:
- Тахогенераторы.
 Виды и устройство. Работа и применение
Виды и устройство. Работа и применение - Магнитные двигатели. Виды и устройство. Применение и работа
- Микродвигатели. Виды и устройство. Подключения и особенности
- Шаговые электродвигатели. Виды и работа. Особенности
- Вентильные двигатели. Виды и устройство. Работа и применение
- Электродвигатели постоянного тока. Устройство и работа. Виды
- Электродвигатель. Виды и применение. Работа и устройство
 Виды и устройство. Работа и применение
Виды и устройство. Работа и применение1.1. Устройство и принцип действия сельсинов.
Принцип действия
сельсинов.
В системах автоматического контроля и
регулирования иногда необходимо
передавать на расстояние заданный угол
поворота вала контролируемого или
регулируемого объекта или получать
информацию об угловом положении вала
этого объекта. Для этой цели применяют
системы дистанционной передачи угла
на электрических машинах синхронной
связи, называемых сельсинами. Сельсины
относятся к информационным электрическим
машинам, так как преобразуют угол
поворота в электрический сигнал и,
наоборот, электрический сигнал в угловое
перемещение.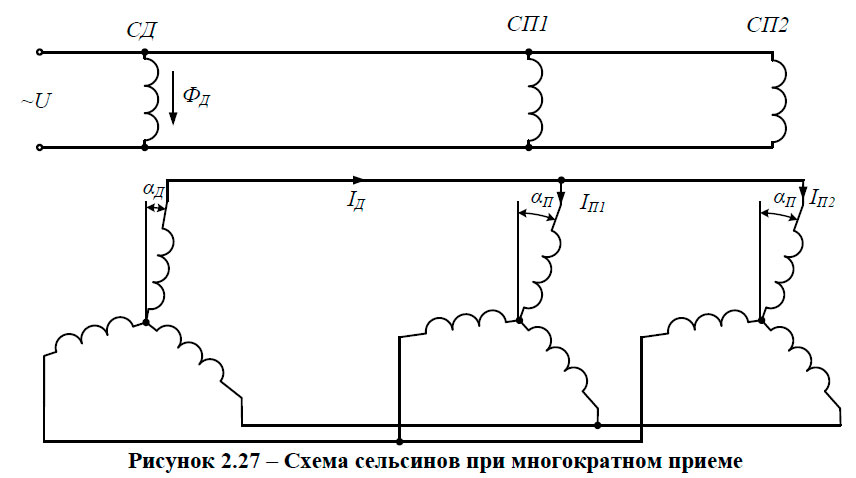
На рис. 1.1 показаны
структурные схемы систем дистанционной
передачи угла поворота вала с помощью
сельсина-датчика СД и сельсина-приемника
СП, соединенных линией связи ЛС. При
повороте вала В на угол α. (рис. 1.1, а)
сельсином-датчиком вырабатывается
соответствующий этому углу сигнал,
который передается по линии связи на
сельсин-приемник СП, где он преобразуется
в угловое перемещение ротора СП на угол
α. Рассмотренная система называется
индикаторной, так как вал сельсина-приемника
поворачивает стрелку индикатора И,
отмечающую на шкале угол поворота
вала В. Индикаторная система только
передает информацию об угловом положении
контролируемого вала.
Рисунок 1.2. Структурные схемы систем
дистанционной передачи угла поворота
вала на сельсинах: индикаторная (а),
трансформаторная (б).
Если требуется
воспроизвести угол поворота α вала В
на каком-либо рабочем механизме, то
система дополняется усилителем
мощности У и исполнительным двигателем
ИМ (рис. 1.1, б), который через редуктор Р
1.1, б), который через редуктор Р
создает на валу рабочего механизма РМ
вращающий момент, достаточный для
поворота вала на угол α. Одновременно
поворачивается ротор сельсина-приемника
СП на угол α. Такая система дистанционной
передачи называется трансформаторной.
Сельсины применяют
также в системах электрического вала,
осуществляющих синхронное вращение
валов нескольких механизмов, находящихся
на расстоянии друг от друга.
В нашем случае
система дистанционной передачи угла
является трансформаторной. Рассмотрим
её подробно.
Трансформаторная
система дистанционной передачи угла
используется для передачи угла
поворота на вал рабочего механизма,
когда необходим значительный вращающий
момент. Основные элементы трансформаторной
системы (рис. 1.3): сельсин-датчик СД,
сельсин-приемник СП, усилитель мощности
У, исполнительный двигатель ИМ и
редуктор Р, предназначенный для редукции
частоты вращения и усиления вращающего
момента.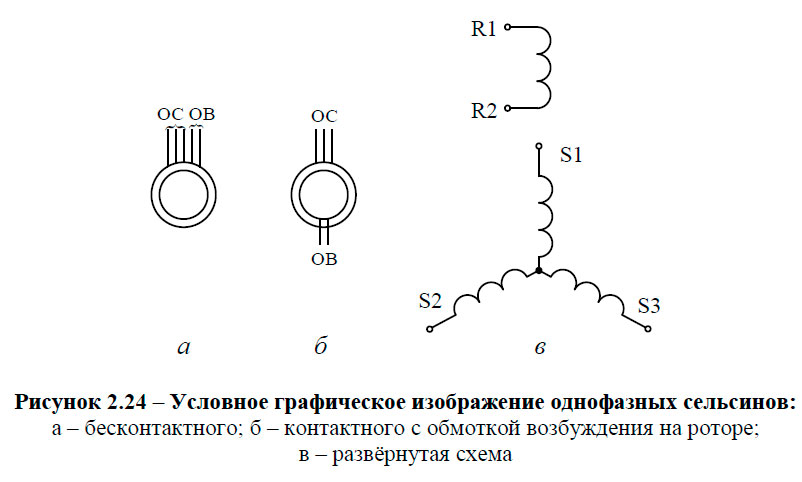 Усилитель, мощности У используется
Усилитель, мощности У используется
для усиления мощности сигнала на выходе
сельсина-приемника до уровня, достаточного
для приведения в действие исполнительного
двигателя ИМ Трансформаторная система
передачи следящая система с обратной
связью по положению вала регулирующего
органа рабочего механизма РО. Редуктор
Р системы имеет два выхода: один
присоединяется к валу рабочего механизма,
другой – к валу сельсина-приемника.
Рисунок 1.3. Схема трансформаторной
системы дистанционной передачи угла.
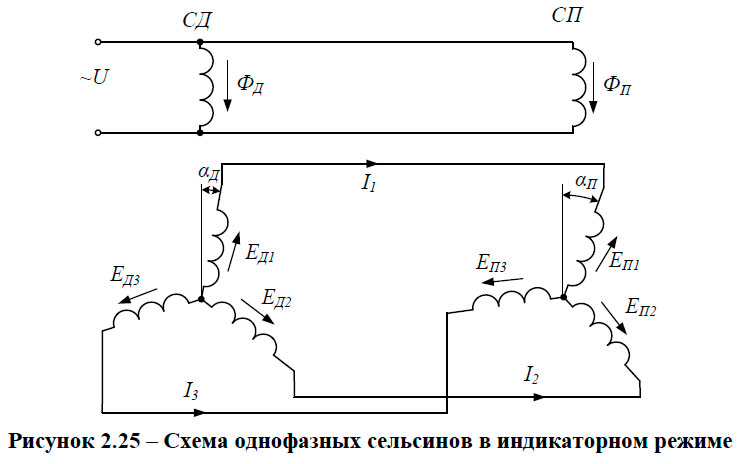
Рассмотрим принцип
работы трансформаторной системы. При
включении в сеть обмотки возбуждения
сельсина-датчика ОВД пульсирующий
магнитный поток возбуждения наводит в
фазах обмотки синхронизации электродвижущие
силы, величина которых зависит от угла
поворота ротора датчика αд
относительно продольной оси. Согласованным
положением роторов датчика и приемника
в трансформаторной системе считают
положение, когда одноименные фазы
обмотки синхронизации смещены
относительно друг друга на 90°.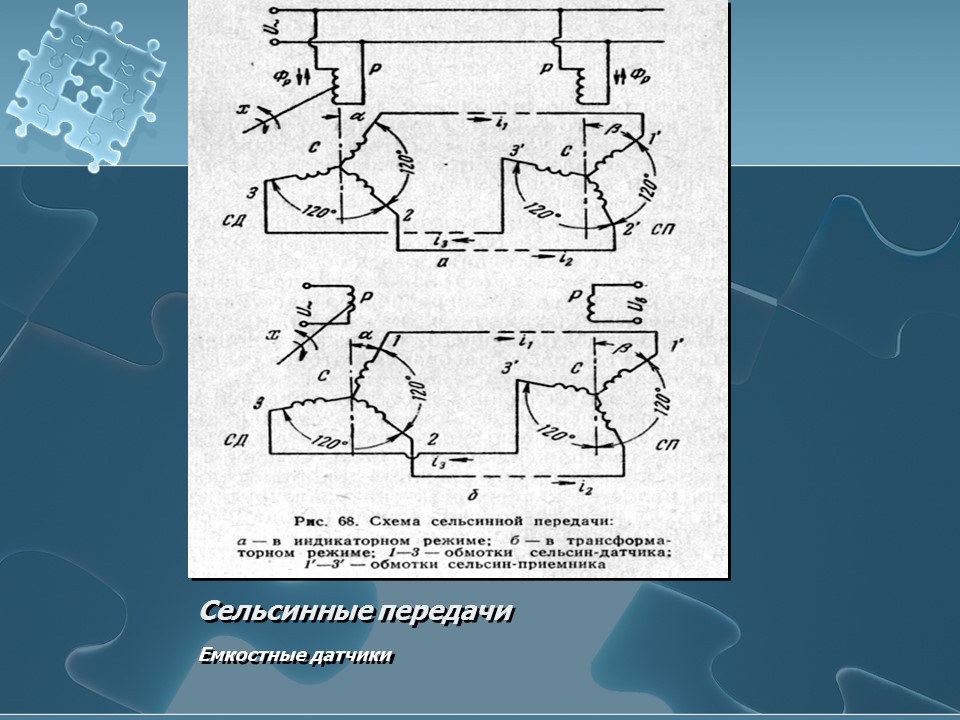 Поэтому
Поэтому
(см. рис. 1.3) отсчет угла αд
в датчике ведется от оси, перпендикулярной
оси обмотки возбуждения. Учитывая это,
ЭДС фазы обмоток синхронизации
датчика
Электродвижущие
силы создают токи в цепи синхронизации
В трансформаторной
системе токи синхронизации создаются
только электродвижущими силами,
наведенными в датчике, а не разностью
ЭДС, как в индикаторной системе. Токи
синхронизации, проходя по соответствующим
обмоткам фаз сельсина-приёмникa
создают пульсирующие МДС, значения
которых принимаем со знаком минус:
где
.
Результирующая
МДС синхронизации по продольной оси
(рис. 1.4, а) Fпd
создает пульсирующий магнитный поток
по продольной оси Фпd,
который наводит в обмотке возбуждения
приемника ОВП ЭДС
,
где Еmax
– действующее значение ЭДС, наводимой
в обмотке возбуждения приемника при
заданном угле поворота на
сельсине-датчике αд
= 90° и
положении ротора приемника, при
котором ось обмотки фазы синхронизации
А расположена по оси обмотки возбуждения.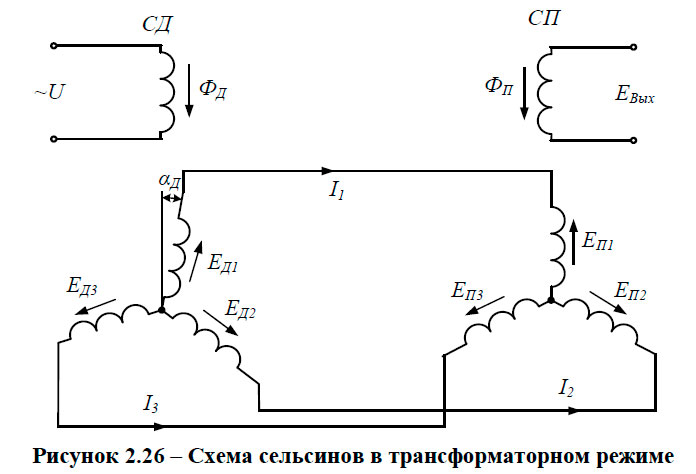
Обмотка возбуждения
приемника в трансформаторной системе
выполняет функцию генераторной обмотки.
Рисунок 1.4. Диаграммы МДС сельсина-приёмника
трансформаторной системы.
Сигнал напряжения
на выходе приемника Uвых
≈ Евых
поступает на вход усилителя мощности
У, на выход которого включена обмотка
управления ОУ исполнительного двигателя
М. При этом ротор двигателя приходит
во вращение, которое через понижающий
редуктор Р передается, на вал рабочего
механизма РО и на ротор сельсина-приемника
СП. По мере отработки заданного угла αд
МДС синхронизации по продольной оси
Fпd
постепенно уменьшается, следовательно,
уменьшается напряжение сигнала Uвых.
После того как ротор приемника будет
повернут на угол αп
≈ αд,
выходной сигнал напряжения уменьшится
до Uвых ≈
0 и трансформаторная система придет в
равновесие. Для пояснения обратимся
к рисункам 1. 3 и 1.4. Допустим, что на
3 и 1.4. Допустим, что на
сельсине-датчике СД задан угол поворота
αд
= 60° против часовой стрелки, тогда МДС
фазы обмотки синхронизации приемника
равны
;
;
.
Переходя к
относительным значениям МДС, запишем
;
;
.
Из диаграммы МДС
(рис. 1.4, а) получим относительное значение
результирующей МДС обмотки синхронизации
приемника по продольной оси
.
После поворота
ротора приемника на угол αп
= αд
= 60° диаграмма МДС синхронизации
приемника примет вид, представленный
на рисунке 1.4, б. Из диаграммы следует,
что результирующая МДС по продольной
оси равна нулю:
.
Особенность работы
трансформаторной системы состоит в
том, что сельсин-приемник этой системы
самостоятельно не отрабатывает заданный
угол поворота, а только выдает сигнал
на включение исполнительного
двигателя, который осуществляет отработку
заданного угла поворота.![]() Применив в
Применив в
системе исполнительный двигатель
требуемой мощности, можно посредством
трансформаторной системы
передачи угла
управлять угловым положением вала
рабочего механизма.
Точность работы
трансформаторной системы зависит от:
формы и распределения магнитной
индукции в воздушном зазоре сельсинов;
остаточной ЭДС: удельного выходного
напряжения; удельной выходной мощности;
магнитной несимметрии; сопротивления
линии связи; количества приемников,
подключенных к одному датчику.
Для обеспечения
синусоидальной зависимости Uвых
= f(αд)
необходимо, чтобы график распределения
магнитной индукции вдоль воздушного
зазора по периметру ротора был
синусоидальным. С этой целью в
трансформаторных системах применяют
сельсины неявнополюсной конструкции
(рис. 1.5, в).
Рисунок 1.5. Магнитные системы однофазных
контактных сельсинов с явнополюсным
статором (а), с явнополюсным ротором
(б), неявнополюсная.
Остаточная ЭДС
сельсина-приемника Еост
– это ЭДС на выходе приёмника при
согласованном состоянии системы. Обычно
Еост
= 0,2 ÷ 0,5 В. Причины наведения остаточной
ЭДС: всякого рода дефекты, возникающие
при изготовлении сельсинов; емкостная
связь между обмотками возбуждения и
синхронизации и т. п. Для исключения
влияния остаточной ЭДС на работу системы
требуется такая настройка усилителя
мощности, чтобы сигнал Uвых
= = Еост
создавал напряжение на выходе усилителя,
меньшее напряжения трогания исполнительного
двигателя.
Удельное выходное
напряжение сельсина-приемника – это
напряжение Uвых,
приходящееся на один градус угла
рассогласования:
.
Удельная выходная
мощность Руд
– это мощность, которую можно снять с
выходной обмотки сельсина-приемника
при угле рассогласования в один
градус. Минимально допустимым значением
мощности на выходе приемника считается
такое значение, при котором на выходе
усилителя появляется напряжение.
Влияние сопротивления
линии связи на точность трансформаторной
системы заключается в том, что сопротивление
проводов этой линии уменьшает токи в
обмотках синхронизации. Это уменьшает
МДС по продольной оси сельсина-приемника,
а, следовательно, уменьшает удельное
напряжение сельсина-приемника и точность
системы.
Ток в обмотке
возбуждения сельсина-приемника создает
реакцию этой обмотки, ослабляющую ЭДС
Евых.
Для уменьшения реакции желательно,
чтобы усилитель мощности имел достаточно
большое входное сопротивление, что
уменьшает ток в обмотке возбуждения
приемника.
Количественной
оценкой точности сельсина-приёмника
является погрешность угла рассогласования,
град,
,
где Θ1max
и Θ2max
– максимальное положительное и
отрицательное отклонение положений
ротора сельсина-приёмника относительно
углов, задаваемых датчиком при его
повороте на 360° по часовой стрелке, а
затем против часовой стрелки.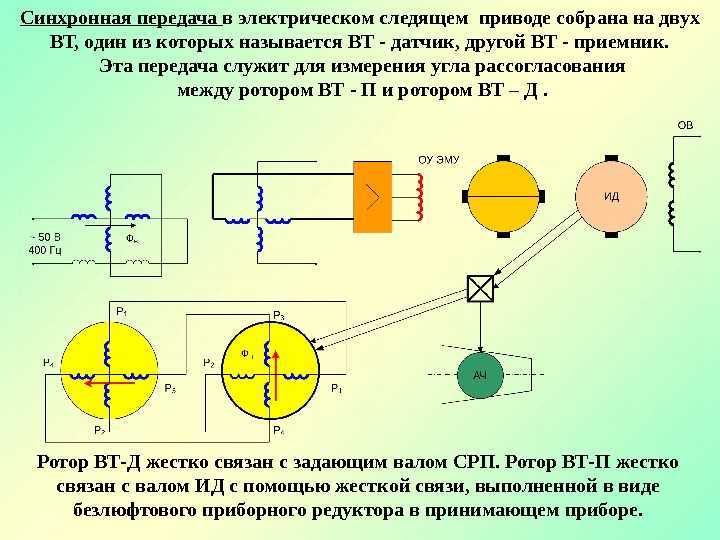
Конструкция
сельсинов.
По конструкции
различают: контактные и бесконтактные
сельсины. Контактные
сельсины.
Отличительный признак контактных
сельсинов – наличие у них контактных
колец и щеток, посредством которых
обмотка ротора соединяется с внешней
цепью. Обычно сельсины делают
двухполюсными. Магнитную систему
контактного сельсина (сердечники
статора и ротора) делают из листовой
электротехнической стали. Сельсины
могут быть явнополюсными и неявнополюсными.
В явнополюсных сельсинах один из
элементов магнитопровода (статор
или ротор) имеет два явно выраженных
полюса с полюсными катушками обмотки
возбуждения ОВ. Тогда другой элемент
(ротор или статор) делают неявнополюсным
с распределенной обмоткой синхронизации
ОС, состоящей из трех обмоток фаз,
сдвинутых в пространстве относительно
друг друга на 120° (рис. 1.5, а, б). Если ротор
сельсина-приемника явнополюсный, то на
его сердечнике обычно располагают
демпферную обмотку ДО в виде
короткозамкнутого витка, ось которого
перпендикулярна оси полюсов. В
В
неявнополюсных сельсинах обмотки
статора и ротора делают распределенными.
При этом обмотки синхронизации ОС и
возбуждения ОВ могут быть расположены
как на роторе, так и на статоре (рис. 1.5,
в).
В индикаторных
системах обычно применяют явнополюсные
сельсины, так как они имеют повышенное
значение удельного синхронизирующего
момента (см. рис. 1.6, б, график 1). В
трансформаторных системах используют
неявнополюсные сельсины, так как их
удельный синхронизирующий момент
меньше, чем у явнополюсных (см. рис. 1.6,
б, график 2), но распределение магнитной
индукции в воздушном зазоре практически
синусоидально, что обеспечивает им
необходимую точность в трансформаторной
системе.
Рисунок 1.6. Графики зависимости
синхронизирующего момента сельсина от
угла рассогласования.
На рисунке 1.7
показано устройство контактного сельсина
с неявнополюсной магнитной системой.
Обмотка синхронизации 4 расположена
на сердечнике статора 3, а обмотка
возбуждения 2 – на сердечнике ротора
1. Контактные кольца 5 и щетки обычно
Контактные кольца 5 и щетки обычно
изготавливают из сплава, содержащего
серебро, что способствует более надежной
и продолжительной работе этого контактного
узла сельсинов. Обмотка возбуждения
может быть расположена как на роторе,
так и на статоре. При расположении ее
на ротope число контактных колец равно
двум. В этом случае через кольца и щетки
ток возбуждения проходит непрерывно,
даже когда система согласована.
Рисунок 1.7. Устройство контактного
сельсина.
Чтобы увеличить
надежность контактных сельсинов, кольца
и щетки обычно изготавливают из сплавов,
содержащих серебро. Однако и эта мера
полностью не избавляет контактные
сельсины от присущих им недостатков.
Бесконтактные
сельсины.
Наибольшее применение в устройствах
автоматики получили бесконтактные
сельсины, не имеющие скользящих
электрических контактов (колец и щеток).
Эти сельсины отличаются от контактных
высокой точностью и стабильностью
характеристик при колебаниях
температуры, влажности и т.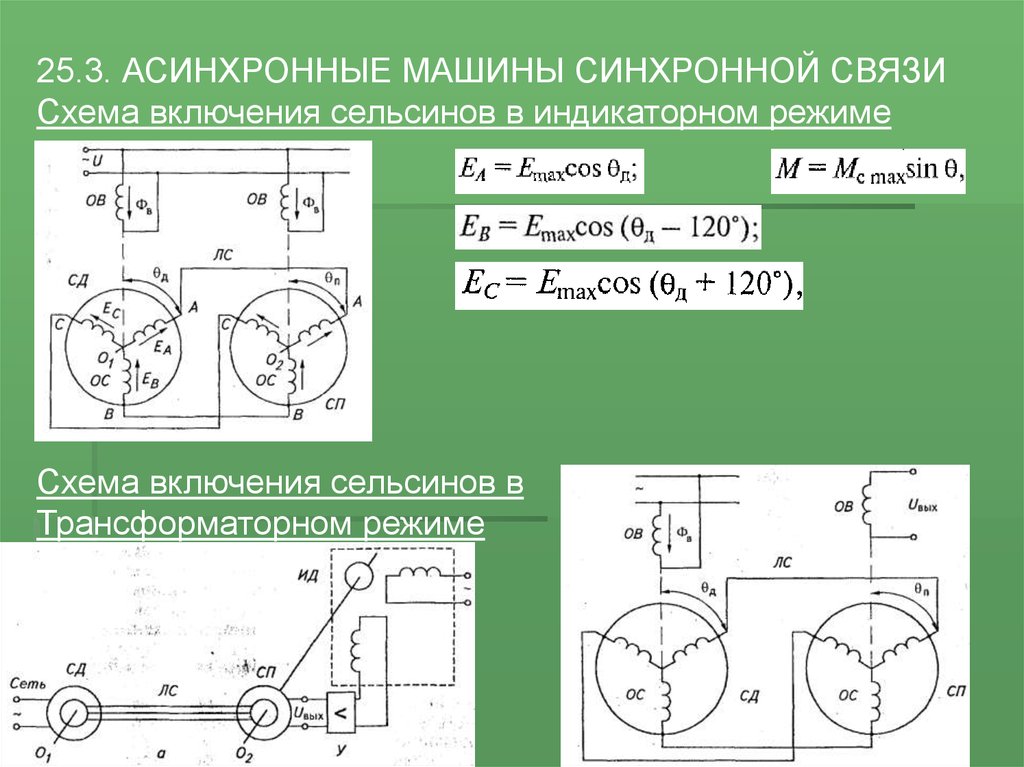 п., а также
п., а также
высокой эксплуатационной надежностью.
В настоящее время
применяются бесконтактные сельсины
двух конструкций: сельсины с двумя
обмотками на статоре и сельсины с
кольцевым трансформатором. Сельсины с
двумя обмотками на статоре были
разработаны российскими учеными А. Г.
Иосифьяном и Д. В. Свечарником. На рисунке
1.8 показана конструктивная схема такого
сельсина. Ротор 6 представляет собой
цилиндр из ферромагнитного материала
(стали), состоящий из двух магнитно
разделенных частей, называемых полюсами.
В качестве магнитной изоляции, разделяющей
полюса ротора друг от друга, используется
алюминиевая прослойка. Эта же прослойка
скрепляет полюса ротора. С торцевых
сторон сельсина расположены тороидальные
сердечники 1, выполненные из тонколистовой
электротехнической стали. Внутренняя
поверхность этих сердечников расположена
над ротором, а к их внешней поверхности
примыкают стержни внешнего магнитопровода
4. Однофазную обмотку возбуждения
сельсина выполняют в виде двух дисковых
катушек 2, расположенных с противоположных
сторон статора между обмоткой
синхронизации 5 и тороидальными
сердечниками 1.
Рисунок 1.8. Конструктивная схема
бесконтактного сельсина конструкции
Иосифьяна и Свечарника.
Магнитный поток
возбуждения, замыкаясь вокруг правой
дисковой катушки 2 по правому
тороидальному сердечнику 1, через
воздушный зазор проходит в один из
полюсов ротора 6. Благодаря немагнитному
промежутку 7, разделяющему полюса ротора,
этот магнитный поток проходит через
воздушный зазор между ротором и статором
в сердечник статора 3 с обмоткой
синхронизации 5. Пройдя по зубцам и
спинке этого сердечника, поток через
воздушный зазор проходит во второй
полюс ротора. Затем через зазор и левый
тороидальный сердечник 1 вокруг левой
дисковой катушки 2 он попадает в стержни
внешнего магнитопровода 4 и замыкается
в правом тороидальном сердечнике 1.
Таким образом, в
процессе работы сельсина пульсирующий
магнитный поток возбуждения замыкается
в магнитной системе сельсина, сцепляясь
с обмоткой синхронизации на сердечнике
статора. При этом, если поворачивать
При этом, если поворачивать
ротор сельсина, то вместе с полюсами
ротора будет поворачиваться и магнитный
поток, т.к. В бесконтактном сельсине,
так же как и в контактном, потокосцепление
потока возбуждения с обмоткой
синхронизации зависит от пространственного
положения (угла поворота) ротора.
Благодаря разделению ротора бесконтактного
сельсина на магнитно-изолированные
полюса, обмотки синхронизации и
возбуждения можно расположить на статоре
и отказаться от контактных колец и
щеток.
Магнитный поток
возбуждения (см. рис. 1.8), замыкаясь в
магнитопроводе сельсина, четыре раза
проходит через воздушный зазор. Поэтому
для создания в сельсине требуемого
магнитного потока требуется
значительная МДС обмотки возбуждения,
что является причиной повышения
габаритных размеров бесконтактного
сельсина по сравнению с контактным
сельсином.
В последнее время
применяются бесконтактные сельсины с
кольцевым трансформатором (рис. 1.9).
Обмотка синхронизации 2 такого сельсина
расположена на стaтopе 4, обмотка возбуждения
1 – на роторе 3. Питание обмотки возбуждения
Питание обмотки возбуждения
осуществляется посредством кольцевого
трансформатора. Магнитопровод этого
трансформатора состоит из двух частей,
разделенных воздушным зазором. Неподвижная
часть 5 с первичной обмоткой 6 расположена
на статоре, а вращающаяся часть 8 со
вторичной обмоткой 7 – на роторе.
Рисунок 1.9. Устройство бесконтактного
сельсина с кольцевым трансформатором.
Энергия из первичной
обмотки трансформатора 6 передается во
вторичную обмотку 7, связанную с обмоткой
возбуждения сельсина. Магнитный поток
Ф в кольцевом магнитопроводе
трансформатора дважды проходит через
воздушный зазор, что является причиной
повышенного значения намагничивающего
тока, а следовательно, и габаритных
размеров трансформатора. Однако при
частотах 400, 500 и 1000 Гц, для которых
предназначен рассматриваемый сельсин,
кольцевой трансформатор имеет небольшие
габаритные размеры, позволяющие
расположить его в корпусе сельсина.
В системах
дистанционной передачи угла применяются
дифференциальные сельсины, назначение
которых – воспроизводить угол поворота,
равный сумме или разности углов, заданных
двумя сельсинами-датчиками.
Дифференциальный сельсин имеет две
трехфазные обмотки, одна из которых
расположена в пазах неявнополюсного
статора, а другая – в пазах
неявнополюсного ротора. Вывод обмотки
ротора для подключения к внешней сети
осуществлен посредством трех контактных
колец и щеток.
Принцип работы синхронного датчика положения
by —
Маюреш Джоши
по —
25 марта 2017 г.
Мы знаем, что Syncro — это индуктивное устройство, работающее по принципу вращающегося трансформатора. Здесь термин «вращающийся трансформатор» означает, что связь между первичной и вторичной обмотками можно изменить, физически изменив относительную ориентацию обмотки. Таким образом, основываясь на этом принципе работы синхронизатора, мы можем использовать его в качестве датчика положения.
- Synchro Pair
Строительство позиционного преобразователя:
Положение. Он использует ротор в форме гантели. Однофазный переменный ток подается на ротор Synchro. Этот ротор механически связан с валом вращающегося элемента, угловое положение которого необходимо определить.
Он использует ротор в форме гантели. Однофазный переменный ток подается на ротор Synchro. Этот ротор механически связан с валом вращающегося элемента, угловое положение которого необходимо определить.
- ?= angular position of the rotor
- Eom = peak value of voltage of each winding
- w= 2pf
- f= frequency of the rotor
- t = time in seconds .
- Синхронная пара в качестве детектора ошибок.
- Различные типы твердотельных реле (ТТР) и их работа.
. Эти три обмотки статора соединены в звезду. Оставшиеся концы каждой обмотки выведены, чтобы соединить их с вольтметром, как показано на рисунке. Когда угол поворота ротора изменяется, выходное напряжение, т. е. напряжение статора каждой обмотки, определяется выражением
E1 = Eom cos? sin wt = мгновенное напряжение для обмоток статора S1.
E1 = Eom cos(?+120) sin wt = мгновенное напряжение для обмоток статора S2.
E1 = Eom cos(?+240) sin wt = мгновенное напряжение для обмоток статора S3.
Where

Все мгновенные напряжения имеют синусоидальный характер. Но они дают разные значения напряжения при разном положении ротора.
Таким образом, используя эти три значения напряжения статора, мы можем легко измерить положение ротора. Следовательно, Synchro можно использовать в качестве датчика положения.
Применение датчика положения:
1) Для измерения угла поворота машины, такой как антенная платформа.
2) Датчик положения может использоваться как датчик поворота для рулевых поверхностей самолета
Вам также могут понравиться:
Если вам понравилась эта статья, поделитесь ею с друзьями и поставьте лайк или на странице Facebook для будущих обновлений. Подпишитесь на нашу рассылку, чтобы получать уведомления о наших обновлениях по электронной почте. Если у вас есть какие-либо вопросы, не стесняйтесь спрашивать в разделе комментариев ниже. Хорошего дня!
Подпишитесь на нашу рассылку, чтобы получать уведомления о наших обновлениях по электронной почте. Если у вас есть какие-либо вопросы, не стесняйтесь спрашивать в разделе комментариев ниже. Хорошего дня!
Radartutorial
Синхронизаторы
Рисунок 1: Синхронизатор выглядит как очень маленький электродвигатель трехфазного тока (диаметр: 1½»).
Рисунок 1: Синхронизатор выглядит как очень маленький электродвигатель трехфазного тока ( диаметр: 1½»)
Синхронизаторы
Синхронизатор по размеру и внешнему виду напоминает небольшой электродвигатель и работает
как переменный трансформатор.
Термин «синхронный» является аббревиатурой слова «синхронный».
Это название, данное множеству вращающихся, электромеханических устройств, чувствительных к положению.
Синхросы также могут называться сельсинами.
Первоначально Selsyn был названием General Electric для собственного «самосинхронного» устройства.
но с тех пор стал синонимом синхро.
Рис. 2: Принцип синхронного измерения крутящего момента.
Рис. 2: Принцип синхронного измерения крутящего момента.
Синхронизаторы
— это просто регулируемые трансформаторы. Каждый синхронизатор содержит ротор,
по внешнему виду похож на якорь в двигателе, и статор, который соответствует
в поле на моторе. Системы синхронизации крутящего момента классифицируются как «моментные».
потому что они в основном связаны с крутящим моментом или вращающей силой, необходимой для перемещения
легкие нагрузки, такие как циферблаты, указатели или аналогичные индикаторы.
Позиционирование этих устройств требует относительно небольшого крутящего момента.
Синхростатор состоит из трех Y- или Δ-соединенных
обмотки расположены на расстоянии 120 градусов друг от друга. И стационарная, и вращающаяся катушки подключены к одному и тому же
напряжение питания (чаще всего 400 Гц или 50 Гц переменного тока с U = 110 В).
Крутящий момент, развиваемый в синхронизирующем приемнике, является результатом стремления двух электромагнитов
привести себя в порядок.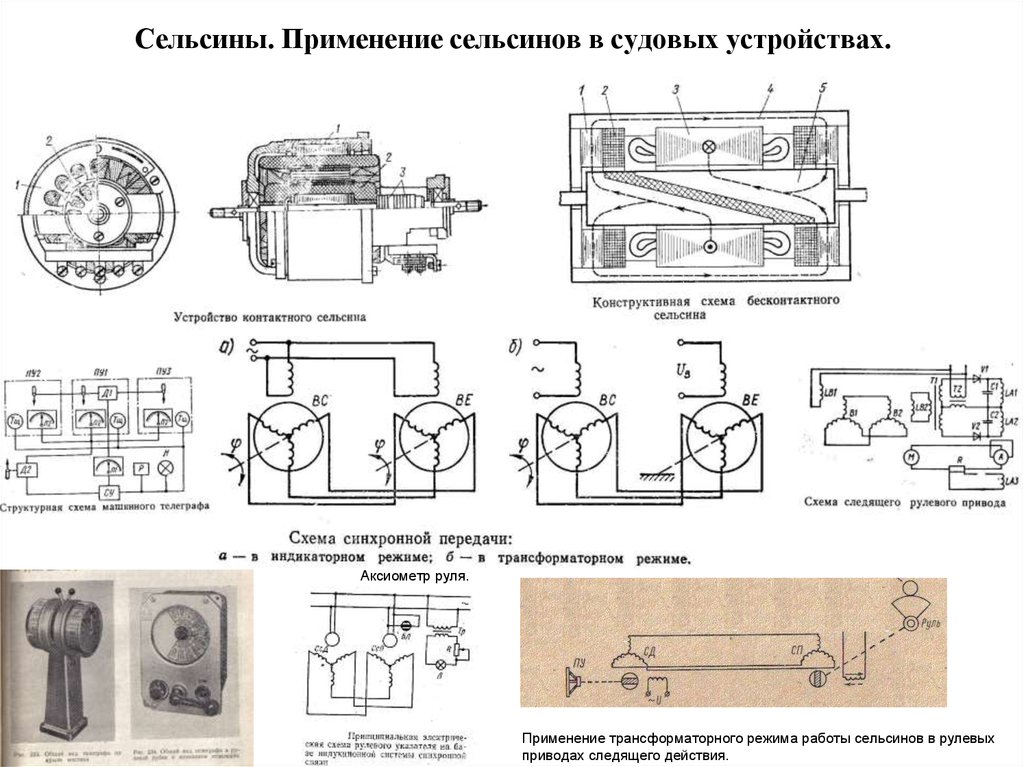 Поскольку ротор можно повернуть, а статор, как правило, нет,
Поскольку ротор можно повернуть, а статор, как правило, нет,
статор должен прикладывать силу (крутящий момент), стремящуюся втянуть ротор в положение, при котором
первичное и вторичное магнитные поля совпадают. Сила магнитного поля
создаваемый статором определяет крутящий момент. Сила поля зависит от силы тока
через обмотки статора. По мере увеличения тока через статор
напряженность поля увеличивается и развивается больший крутящий момент.
Синхронизаторы управления используются в системах, которые предназначены для перемещения тяжелых грузов, таких как оружие
директора, радиолокационные антенны и ракетные пусковые установки.
Сервосистема позиционирования, использующая синхронизирующую систему управления.
состоящий из серводвигателя, сервоусилителя, управляющего передатчика (нагрузки) и управляющего трансформатора.
сигнал ошибки
Рис. 3: Типичная электромеханическая следящая сервосистема.
сигнал ошибки
Рис. 3: Типичная электромеханическая следящая сервосистема.
Сигнал ошибки усиливается сервоусилителем и подается на серводвигатель.
Серводвигатель поворачивает нагрузку и через механическую связь, называемую «реакцией»,
также вращает ротор управляющего трансформатора.
Серводвигатель поворачивает ротор управляющего трансформатора так, что он снова находится в
соответствие с ротором серводвигателя, сигнал ошибки падает до нуля вольт,
и система останавливается.
Если передаваемые данные охватывают лишь небольшой диапазон значений, односкоростной
система обычно достаточно точна. Однако в приложениях, где данные охватывают широкий
диапазон значений и точность системы наиболее важны, 1-скоростная система
недостаточно адекватна и должна быть заменена более подходящей системой.
Увеличение скорости односкоростной системы с 1 до 36 обеспечивает большую точность.
Базовая двухскоростная синхронная система состоит из двух передатчиков и двух приемников.
Две скорости этой системы часто называют быстрой и медленной, высокой и низкой.