Содержание
ШИМ регулятор оборотов двигателя 12-40В, 10А
ШИМ регулятор оборотов коллекторного двигателя постоянного тока DC 12-40В 10А 13КГц.
ШИМ регулятор мощности имеет самое широкую область применения. Это регулятор хода коллекторных двигателей, диммер для светодиодов и светодиодных лент, реобас для майнинг фермы.
Регулятор скорости двигателя постоянного тока 10A предназначен для регулирования мощности низковольтных (+12…40 В) нагрузок постоянного тока (электродвигатели, лампы накаливания и т.п.). Благодаря использованию в схеме управления метода ШИМ (широтно-импульсная модуляция), подключенные к устройству электродвигатели могут устойчиво работать даже на малых оборотах. Усиленный радиатор охлаждения и распределенная нагрузка на транзисторы гарантируют его надежную работу в изделиях с непрерывным управлением. К ним относятся регуляторы скорости вращения двигателя постоянного тока, регуляторы освещения с лампой накаливания, а также в других схемах управления током.
ШИМ регулятор оборотов используется для регулирования оборотов мощных вентиляторов, это реобас для майнинг фермы. Вентиляторы подключаются параллельно и для соединения вентиляторов используются только черный и красный провода.
На плате регулятора есть предохранитель, рассчитанный до 10А силы тока, используется для предотвращения подачи на плату аварийного тока больше 10 А. Управление скоростью двигателя осуществляется с помощью регулировочного резистора на 10 кОм с ручкой.
- Используется для точной регулировки скорости вращения коллекторных электродвигателей (вентиляторы, вакуумные масляные насосы, лопасти, двигатели стеклоочистителей и т. д.)
- Высокая эффективность, высокий крутящий момент, низкий нагрев
- С высокой защитой по току
- Предназначен для управления нагрузкой до 10 А
- Диапазон управления скоростью двигателя от 10 до 100%
- На плате установлен электролитический конденсатор 1000 мкФ 50 В
- Управление производится с помощью мощного полевого транзистора IRF3205
Характеристики
Напряжение питания: 12 – 40 В постоянного тока
Номинальный ток: 8 А
Максимальный ток: 10 А
ШИМ рабочий цикл: 10% – 100%
Частота ШИМ: 13 кГц
Размеры: 60 х 55 х 28 мм
Регулирует мощность: 12В*8А = 96Вт, 24В*8А = 192Вт, 40В*8А = 320Вт
Схема подключения:
На плате регулятора имеется 4 винтовых клеммы для подключения двигателя и питания. На задней стороне платы есть обозначения клемм.
На задней стороне платы есть обозначения клемм.
Клеммы Power + и Power- подключаем к источнику питания соответственно + и — (например, к аккумулятору)
Клеммы Motor+ и Motor- подключаем к электродвигателю постоянного тока в соответствующей полярности (при смене полярности, двигатель будет вращаться в другую сторону).
Оставьте отзыв об этом товаре первым!
Сравнение 0
+7 (499) 796-69-91
Корзина 0ПустоОформить заказ
Регулятор скорости двигателя постоянного тока
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.![]()
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.![]()
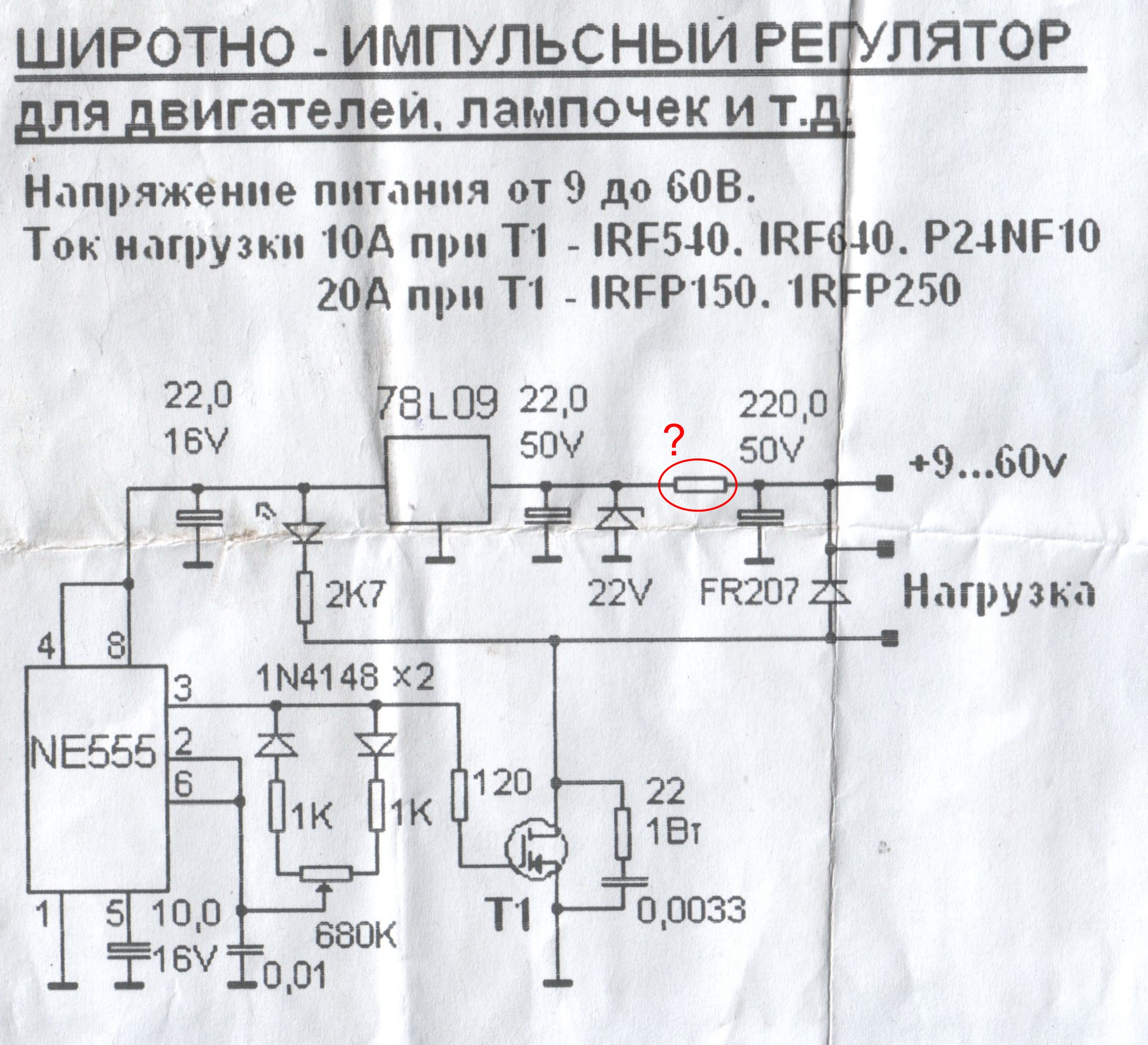
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
555 ШИМ-регулятор скорости двигателя постоянного тока с таймером
В этом уроке мы узнаем, как сделать ШИМ-регулятор скорости двигателя постоянного тока с использованием микросхемы таймера 555. Мы подробно рассмотрим, как работает схема ШИМ-генератора 555 Timer, как использовать ее для управления скоростью двигателя постоянного тока и как сделать для нее собственную печатную плату.
Вы можете посмотреть следующее видео или прочитать письменный учебник ниже.
Обзор
Мы можем управлять скоростью двигателя постоянного тока, контролируя входное напряжение двигателя. Для этой цели мы можем использовать ШИМ или широтно-импульсную модуляцию.
ШИМ Управление скоростью двигателя постоянного тока
ШИМ — это метод, с помощью которого мы можем генерировать переменное напряжение, быстро включая и выключая питание, подаваемое на электронное устройство. Среднее напряжение зависит от рабочего цикла сигнала или количества времени, в течение которого сигнал включен, по сравнению с количеством времени, в течение которого сигнал выключен за один период времени.
555 Схема Генератора ШИМ Таймера
Таймер 555 способен генерировать ШИМ-сигнал, когда установлен в нестабильном режиме. Если вы не знакомы с таймером 555, вы можете проверить мой предыдущий учебник, где я подробно объяснил, что внутри и как работает микросхема таймера 555.
Вот базовая схема таймера 555, работающего в нестабильном режиме, и мы можем заметить, что выходной сигнал ВЫСОКИЙ, когда конденсатор C1 заряжается через резисторы R1 и R2.
С другой стороны, выход IC имеет НИЗКИЙ уровень, когда конденсатор C1 разряжается, но только через резистор R2. Таким образом, мы можем заметить, что если мы изменим значения любого из этих трех компонентов, мы получим разные времена включения и выключения или другой рабочий цикл прямоугольного выходного сигнала. Простой и быстрый способ сделать это — заменить резистор R2 потенциометром и дополнительно добавить в схему два диода.
В этой конфигурации время включения будет зависеть от резистора R1, левой стороны потенциометра и конденсатора C1, а время выключения будет зависеть от конденсатора C1 и правой стороны потенциометра.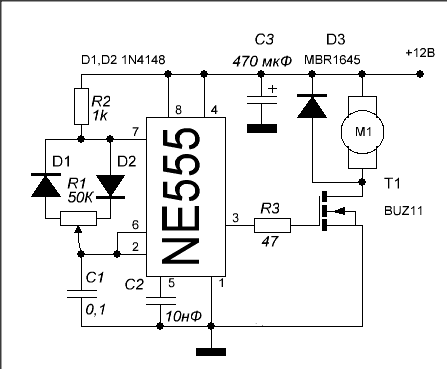 Мы также можем заметить, что в этой конфигурации период одного цикла, а значит, и частота, всегда будут одинаковыми, потому что общее сопротивление при зарядке и разрядке останется одним и тем же.
Мы также можем заметить, что в этой конфигурации период одного цикла, а значит, и частота, всегда будут одинаковыми, потому что общее сопротивление при зарядке и разрядке останется одним и тем же.
Обычно сопротивление R1 намного меньше сопротивления потенциометра, например, 1K по сравнению со 100K потенциометра. Таким образом, у нас есть 99% контроль зарядного и разрядного сопротивления в цепи. Управляющий контакт таймера 555 не используется, но он подключен к конденсатору емкостью 100 нФ, чтобы устранить любые внешние помехи от этого вывода. Сброс, вывод номер 4, имеет активный низкий уровень, поэтому он подключен к VCC, чтобы предотвратить любой нежелательный сброс выхода.
Выход таймера 555 может потреблять или подавать на нагрузку ток 200 мА. Поэтому, если двигатель, которым мы хотим управлять, превышает этот номинал, нам нужно использовать транзистор или полевой МОП-транзистор для управления двигателем. В этом примере я использовал транзистор Дарлингтона (TIP122), который может выдерживать ток до 5 А.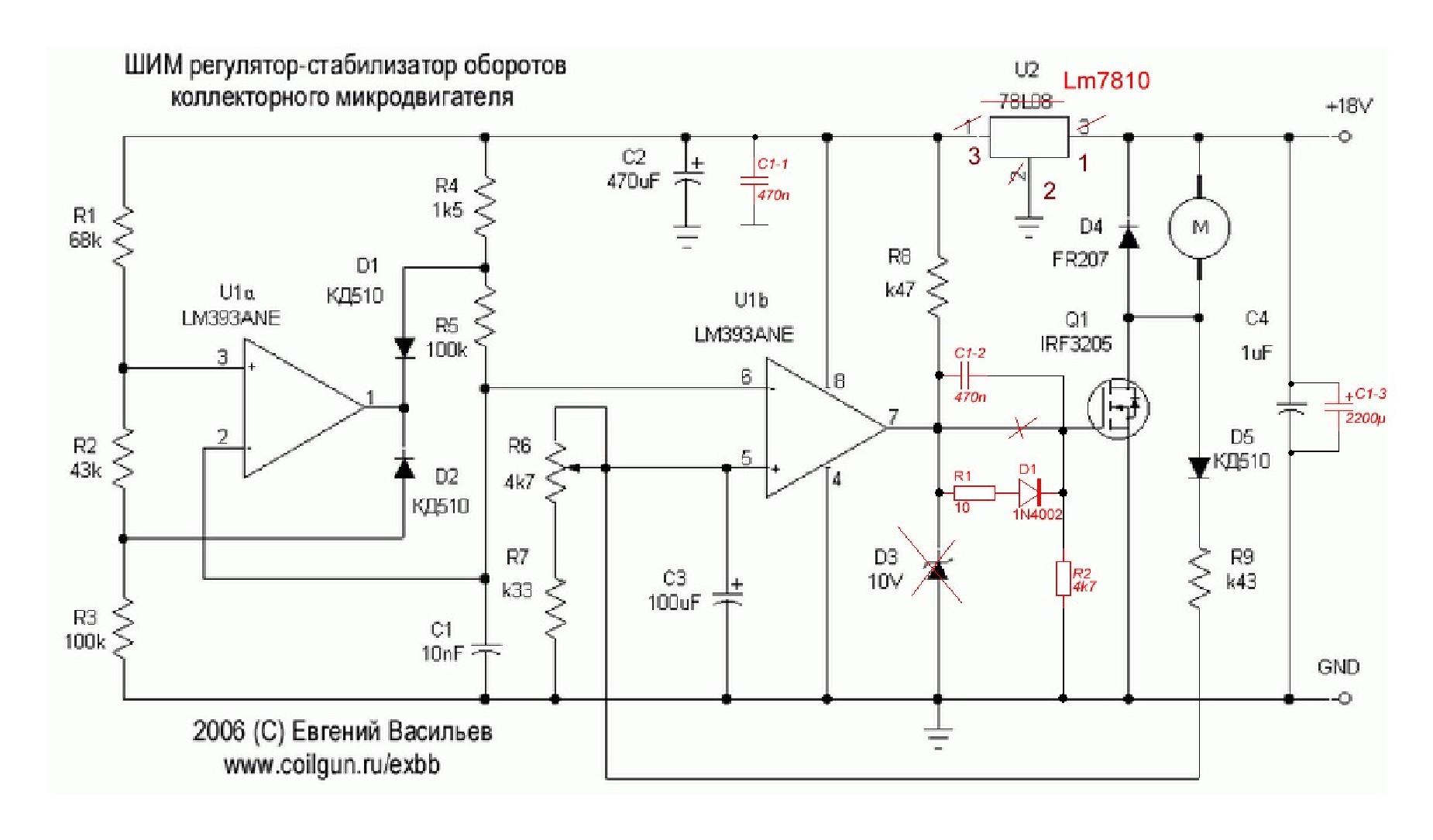
Выход ИС нужно соединить с базой транзистора через резистор, и в моем случае я использовал резистор 1кОм. Для предотвращения скачков напряжения, создаваемых двигателем, необходимо использовать обратный диод, который подключается параллельно двигателю.
Теперь мы можем двигаться дальше и разработать собственную печатную плату для этой схемы. Для этой цели я буду использовать бесплатное онлайн-программное обеспечение EasyEDA. Здесь мы можем начать с поиска и размещения компонентов на чистом холсте. В библиотеке сотни тысяч компонентов, поэтому у меня не возникло проблем с поиском всех необходимых компонентов для этой схемы ШИМ-регулятора скорости двигателя постоянного тока.
После вставки компонентов нам нужно создать контур платы и приступить к размещению компонентов. Два конденсатора должны быть размещены как можно ближе к таймеру 555, в то время как другие компоненты могут быть размещены где угодно, но все же в логическом порядке согласно принципиальной схеме.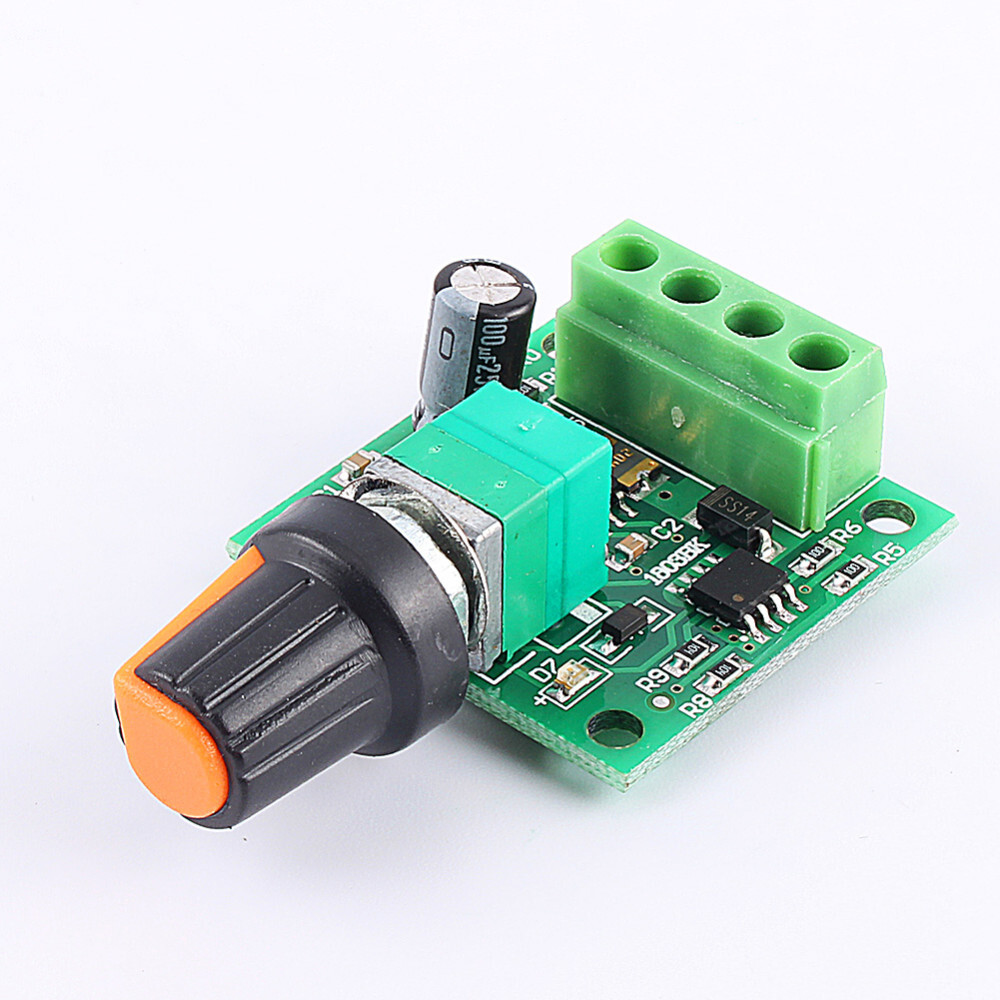
С помощью инструмента отслеживания нам нужно соединить все компоненты. Инструмент отслеживания довольно интуитивно понятен и с ним легко работать. Мы можем использовать как верхний, так и нижний слой, чтобы избежать пересечений и сделать пути короче.
Контактные площадки компонентов, которые должны быть подключены к заземлению, устанавливаются на заземление через вкладку Свойства контактных площадок, где нам нужно ввести GND в метку «Сеть», когда контактная площадка выбрана.
Мы можем использовать слой Silk, чтобы добавить текст на доску. Также мы можем вставить файл изображения, поэтому я добавляю изображение логотипа моего веб-сайта для печати на доске. В конце, используя инструмент Copper Area, нам нужно создать область земли на печатной плате.
Файлы проекта EasyEDA этого проекта можно найти здесь.
Когда мы закончим с дизайном, нам просто нужно нажать кнопку «Gerber output», сохранить проект, и мы сможем загрузить файлы Gerber, которые используются для изготовления печатной платы. Мы можем заказать печатную плату у JLCPCB, которая является службой изготовления печатных плат EasyEDA, а также является спонсором этого видео.
Мы можем заказать печатную плату у JLCPCB, которая является службой изготовления печатных плат EasyEDA, а также является спонсором этого видео.
Здесь мы можем просто перетащить загруженный zip-файл с файлами gerber. После загрузки мы можем еще раз просмотреть нашу плату в программе просмотра Gerber. Если все в порядке, мы можем выбрать до 10 печатных плат и получить их всего за 2 доллара.
Сборка печатной платы ШИМ-контроллера скорости двигателя постоянного тока
Тем не менее, через неделю печатные платы были доставлены, и я должен признать, что очень приятно иметь собственный дизайн печатной платы. Качество печатных плат отличное, все точно так же, как и в дизайне.
Итак, теперь мы можем перейти к установке компонентов на печатную плату.
Компоненты, необходимые для этого примера, можно получить по ссылкам ниже:
- ИС таймера NE555P……………………………… Amazon / Banggood / AliExpress
- R1 = R2 = 1 кОм………………………….
 Amazon / Banggood / AliExpress
Amazon / Banggood / AliExpress - C1 = C2 = 100 нФ…………………………….. Amazon / Banggood / AliExpress
- D1 = D2 = D3 = 1N4004………………… . Amazon/Banggood/AliExpress
- Потенциометр = 100 кОм……………. Amazon / Banggood / AliExpress
- Транзистор — Darlington TIP122………. Amazon / Banggood / AliExpress
- 2 блочных терминала …………………………. Amazon / Banggood / AliExpress
 Amazon / Banggood / AliExpress
Amazon / Banggood / AliExpress Раскрытие информации: это партнерские ссылки. Как партнер Amazon я зарабатываю на соответствующих покупках.
Сначала я вставил меньшие компоненты, резисторы, диоды и конденсаторы.
Я согнул их выводы с другой стороны, чтобы они оставались на месте, когда я переворачиваю плату для пайки. Что касается более крупных компонентов, я использовал клейкую ленту, чтобы удерживать их на месте при переворачивании платы.
Вот окончательный вид платы и осталось подключить двигатель постоянного тока и подходящий блок питания к нему.
Я использовал двигатель постоянного тока с высоким крутящим моментом 12 В, который я питал от литий-ионных аккумуляторов 3,7 В, соединенных последовательно, которые дают около 12 В. Итак, теперь, используя потенциометр, мы можем управлять скоростью двигателя постоянного тока или ШИМ-сигналом, создаваемым микросхемой таймера 555.
Надеюсь, вам понравился этот урок и вы узнали что-то новое. Не стесняйтесь задавать любые вопросы в разделе комментариев ниже.
Рубрики Электроника
PWM Motor Controllers in Depth — документация FIRST Robotics Competition
Подсказка
WPILib имеет обширную поддержку управления двигателем. Существует ряд классов, представляющих различные типы контроллеров двигателей и сервоприводов. В настоящее время существует два класса контроллеров двигателей: контроллеры двигателей на основе ШИМ и контроллеры двигателей на основе CAN. WPILib также содержит составные классы (например, DifferentialDrive), которые позволяют вам управлять несколькими двигателями с помощью одного объекта.![]() В этой статье будут подробно описаны контроллеры двигателей с ШИМ; Контроллеры CAN и составные классы будут рассмотрены в отдельных статьях.
В этой статье будут подробно описаны контроллеры двигателей с ШИМ; Контроллеры CAN и составные классы будут рассмотрены в отдельных статьях.
ШИМ-контроллеры, краткая теория работы
Аббревиатура PWM расшифровывается как широтно-импульсная модуляция. Для контроллеров двигателей ШИМ может относиться как к входному сигналу, так и к методу, который контроллер использует для управления скоростью двигателя. Для управления скоростью двигателя контроллер должен изменять воспринимаемое входное напряжение двигателя. Для этого контроллер очень быстро включает и выключает полное входное напряжение, изменяя время его действия в зависимости от управляющего сигнала. Из-за механических и электрических постоянных времени типов двигателей, используемых в FRC®, это быстрое переключение дает эффект, эквивалентный приложению фиксированного более низкого напряжения (переключение на 50% дает тот же эффект, что и приложение ~6 В).
ШИМ-сигнал, который контроллеры используют для входа, немного отличается. Даже на границах диапазона сигнала (максимальное прямое или максимальное обратное) сигнал никогда не приближается к рабочему циклу 0% или 100%. Вместо этого контроллеры используют сигнал с периодом 5 мс или 10 мс и шириной импульса в средней точке 1,5 мс. Многие контроллеры используют типичную синхронизацию RC-контроллера для хобби от 1 мс до 2 мс.
Даже на границах диапазона сигнала (максимальное прямое или максимальное обратное) сигнал никогда не приближается к рабочему циклу 0% или 100%. Вместо этого контроллеры используют сигнал с периодом 5 мс или 10 мс и шириной импульса в средней точке 1,5 мс. Многие контроллеры используют типичную синхронизацию RC-контроллера для хобби от 1 мс до 2 мс.
Необработанные и масштабированные выходные значения
Как правило, все классы контроллеров моторов в WPILib принимают масштабированное значение от -1,0 до 1,0 в качестве выходных данных для привода. Модуль ШИМ в FPGA на roboRIO способен генерировать сигналы ШИМ с периодами 5, 10 или 20 мс и может изменять ширину импульса на 2000 шагов по ~001 мс каждый вокруг средней точки (1000 шагов в каждом направлении вокруг средней точки). ). Необработанные значения, отправляемые в этот модуль, находятся в этом диапазоне 0-2000, где 0 является особым случаем, который удерживает сигнал на низком уровне (отключено). Класс для каждого контроллера мотора содержит информацию о типичных граничных значениях (минимум, максимум и каждая сторона зоны нечувствительности), а также типичную среднюю точку. Затем WPILib может использовать эти значения для сопоставления масштабированного значения с правильным диапазоном для контроллера мотора. Это позволяет коду беспрепятственно переключаться между различными типами контроллеров и абстрагироваться от деталей конкретной сигнализации.
Затем WPILib может использовать эти значения для сопоставления масштабированного значения с правильным диапазоном для контроллера мотора. Это позволяет коду беспрепятственно переключаться между различными типами контроллеров и абстрагироваться от деталей конкретной сигнализации.
Калибровка контроллеров двигателей
Итак, если WPILib справляется со всем этим масштабированием, зачем вообще нужно калибровать контроллер мотора? Значения, которые WPILib использует для масштабирования, являются приблизительными и основаны на измерении количества выборок каждого типа контроллера. Из-за множества факторов время отдельного контроллера мотора может незначительно отличаться. Для окончательного устранения «жужжания» (сигнал средней точки интерпретируется как легкое движение в одном направлении) и доведения контроллера до крайних пределов, по-прежнему рекомендуется выполнять калибровку контроллеров. В общем, процедура калибровки для каждого контроллера включает в себя перевод контроллера в режим калибровки, затем доведение входного сигнала до каждого крайнего значения, а затем обратно до средней точки.