Содержание
Расчет и настройка ремённой и винтовой придачи ЧПУ станка. Калибровка.
Продолжаем разбираться с ЧПУ станком. Настройку прошивки GRBL рассмотрели тут: Прошивка grbl 1.1, настройка — инструкция на русском. Но где же взять параметры для настройки ЧПУ станка? Сегодня в статье рассмотрим, как можно рассчитать винтовую и ременную передачу ЧПУ станка. Но расчет не всегда дает 100% результат. Для проверки и корректировки неточности используется калибровка ЧПУ станка. Как это сделать на практике я уже рассказывал в проекте:ЧПУ плоттер на Arduino своими руками.
При расчете нужно учитывать один немало важный параметр, который мы еще не рассматривали подробно – это Микрошаг.
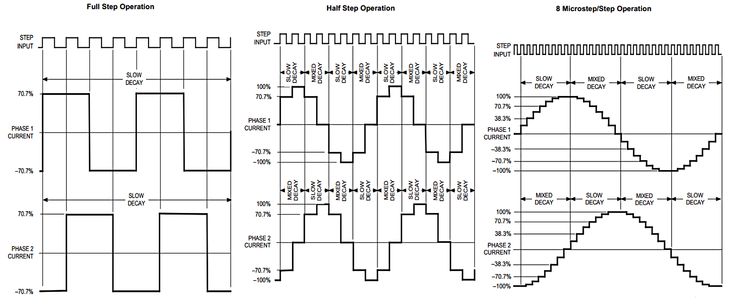
Основной параметр шаговых двигателей (ШД) это количество шагов на 1 оборот. Самое распространённое значение для ШД – 200 шагов на оборот (или 1,8 градуса на шаг). Мы будем использовать это разрешение во всех сегодняшних примерах. Более точную информацию можно узнать в описании к вашему шаговому двигателю. Зачастую 200 шагов на оборот, могут быть недостаточными для достижения необходимой точности. С целью повышения точности можно изменить передаточное число механически (использовать редуктор), а можно включить микрошаг – режим деления шага шагового двигателя, это увеличит число шагов на оборот, с коэффициентом 2n (n — целое число). Драйвер A4988 поддерживает деление шага: 1, 1/2, 1/4, 1/8, 1/16. Подробнее о драйвере A4988 читайте тут: Драйвер шагового двигателя A4988. Драйвер DRV8825 поддерживает деление шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32. Подробнее о драйвере DRV8825 читайте тут: Драйвер шагового двигателя DRV8825.
Мы будем использовать это разрешение во всех сегодняшних примерах. Более точную информацию можно узнать в описании к вашему шаговому двигателю. Зачастую 200 шагов на оборот, могут быть недостаточными для достижения необходимой точности. С целью повышения точности можно изменить передаточное число механически (использовать редуктор), а можно включить микрошаг – режим деления шага шагового двигателя, это увеличит число шагов на оборот, с коэффициентом 2n (n — целое число). Драйвер A4988 поддерживает деление шага: 1, 1/2, 1/4, 1/8, 1/16. Подробнее о драйвере A4988 читайте тут: Драйвер шагового двигателя A4988. Драйвер DRV8825 поддерживает деление шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32. Подробнее о драйвере DRV8825 читайте тут: Драйвер шагового двигателя DRV8825.
Давайте рассмотрим пример. Если мы выставим микрошаг 16, что является в 16 раз больше полного шага и в нашем примере даст 3200 (200х16) шагов на оборот.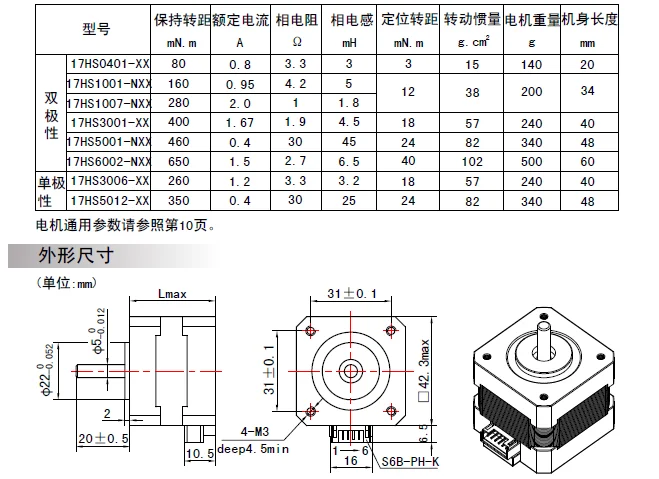 На первый взгляд это отличный результат и почему бы не использовать максимальное деление шага во всех станках. Но тут есть и минус – это падение крутящего момента при увеличении деления шага. Подробнее Микрошаг рассмотрим в следующей статье.
На первый взгляд это отличный результат и почему бы не использовать максимальное деление шага во всех станках. Но тут есть и минус – это падение крутящего момента при увеличении деления шага. Подробнее Микрошаг рассмотрим в следующей статье.
Расчёт винтовой передачи ЧПУ станка.
Винтовая передача ЧПУ, либо ее более продвинутый вариант шарико-винтовая передача (ШВП), являются наиболее часто используемым вариантом перевода вращательного движения вала шагового двигателя в линейное перемещение исполнительного механизма.
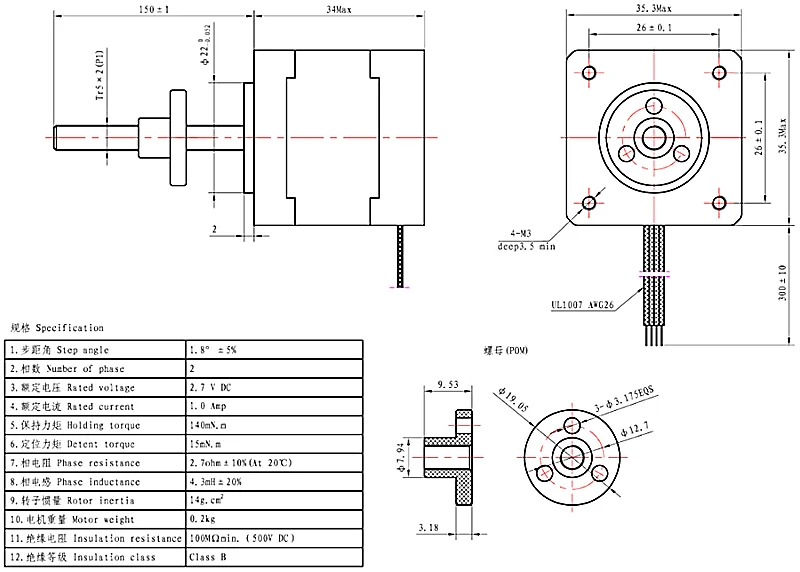
Для расчёта разрешения нам необходимо знать ШАГ винта, либо шаг винта ШВП. В описании трапецеидальных винтов обычно пишут Tr8x8,Tr10x2, первая цифра говорит нам о диаметре винта, вторая как раз о его шаге в мм. Винты ШВП обычно обозначаются 1204, 1605 и т.п. Первые 2 цифры – это диаметр винта, вторые две – это шаг в мм. В 3d-принтерах обычно используют винт Tr8x8, диаметром 8 мм и с шагом 8 мм. Обзор моего 3d-принтера можно посмотреть тут:Обзор 3D принтера Anet A8. Сборка. Наладка.
В 3d-принтерах обычно используют винт Tr8x8, диаметром 8 мм и с шагом 8 мм. Обзор моего 3d-принтера можно посмотреть тут:Обзор 3D принтера Anet A8. Сборка. Наладка.
Формула расчета винтовой передачи ЧПУ получается следующей, в числителе – количество шагов на оборот, в знаменателе – перемещение за оборот.
Тп = Sшд*Fшд/Pр
где:
- Тп — точность перемещения, шаг/мм
- Sшд — количество шагов на оборот для двигателя (в наших примерах 200)
- Fшд — микрошаг (1, 2, 4, 8 и т. д.)
- Pр — шаг винта (например, 8 мм)
Рассчитаем пример со следующими параметрами, двигатель 200 шагов на оборот, с 4-кратным микрошагом, с трапецеидальным винтом Tr8x8 даст нам 100 шагов на мм.
200*4/8=100 шагов/мм.
Другими словами, для того чтобы ЧПУ станок переместился на 1 мм, нам нужно сделать 100 шагов двигателя. Что является неплохой точностью.
Что является неплохой точностью.
Расчетные значения нужно указать в прошивке GRBL:
$100=10.000 кол-во шагов на мм для оси Х $101=10.000 кол-во шагов на мм для оси Y $102=100.000 кол-во шагов на мм для оси Z $100=10.000 кол-во шагов на мм для оси Х $101=10.000 кол-во шагов на мм для оси Y $102=100.000 кол-во шагов на мм для оси Z
Расчет ременной передачи ЧПУ станка.
Во многих ЧПУ станках используются ремни и шкивы. Ремни и шкивы бывают разных форм и размеров, но одним из распространённых стандартов является GT2.
Следующие уравнение применимо для цепных и ременных передач, если вы введете правильный шаг. Обратите внимание, что эти уравнения не учитывают люфт.
Вот простое уравнение, которое вы можете использовать для расчета шагов на мм для линейного движения с ремнями и шкивами.
Тлп = Sшд*Fшд/Pр*Nшк
где:
- Тлп — точность линейного перемещения, шаг/мм
- Sшд — количество шагов на оборот для двигателя (в наших примерах 200)
- Fшд — микрошаг (1, 2, 4, 8 и т.
 д.)
д.) - Pр — шаг ремня (например, 2 мм)
- Nшк — количество зубьев на шкиве, на валу двигателя.
 д.)
д.)
Попробуем посчитать для примера с такими параметрами, двигатель 200 шагов на оборот, с 2-кратным микрошагом, 2-миллиметровыми ремнями GT2 и шкивом с 20 зубцами даст нам 10 шагов на мм.
200*2/2*20=10 шагов/мм.
Данный пример подойдет для расчета перемещения 3d-принтера. ЧПУ станков на ремнях: лазерный гравировальный, плоттер и пр.
Расчетные значения нужно указать в прошивке GRBL:
$100=10.000 кол-во шагов на мм для оси Х $101=10.000 кол-во шагов на мм для оси Y $102=100.000 кол-во шагов на мм для оси Z $100=10.000 кол-во шагов на мм для оси Х $101=10.000 кол-во шагов на мм для оси Y $102=100.000 кол-во шагов на мм для оси Z
Калибровка ЧПУ станка.
После настройки станка необходимо проверить точность перемещения станка по осям. Для этого нужно отправить команду на перемещение по оси, на относительно большое расстояние. Я чаще всего использую 100 мм. После чего произвести замер перемещения. Если значения не отличаются – это означает, что все работает верно. Но если расстояние перемещения больше или меньше, то нужно внести корректировку – провести калибровку ЧПУ станка. Для этого будем использовать формулу:
Тк = Тп * Kп / Kф
где:
- Тк – калибровочное значение, шаг/мм.
- Тп — точность перемещения, шаг/мм (из примера 100 шаг/мм)
- Kп — заданное значение для перемещения (в моем случае 100 мм.)
- Kф — фактически, на какое расстояние переместилась ось (допустим на 99 мм.)
Для примера проведем расчёт винтовой придачи, которую рассчитывали выше и выяснили, что нужно совершить 100 шагов для перемещения на 1 мм.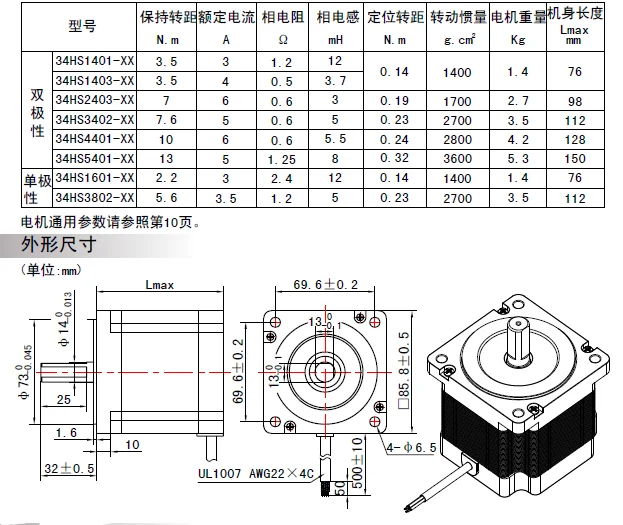 Также допустим, что мы отправили команду на перемещение станка на 100 мм, а по факту он переместился на 99 мм. Произведём расчет:
Также допустим, что мы отправили команду на перемещение станка на 100 мм, а по факту он переместился на 99 мм. Произведём расчет:
100*100/99=101,01 шагов/мм.
Указываем данное значение в прошивке GRBL и проводим калибровку еще раз. Если ЧПУ станок перемещается на заданное значение, можно пользоваться станком. Иначе проводим повторную калибровку.
Понравился статья Расчет и настройка ремённой и винтовой придачи ЧПУ станка. Калибровка! Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Подбор и расчет шаговых двигателей для ЧПУ
При подборе шагового двигателя для ЧПУ необходимо отталкиваться от планируемой сферы применения станка и технических характеристик. Ниже представлены критерии выбора, классификация наиболее популярных двигателей и примеры расчета.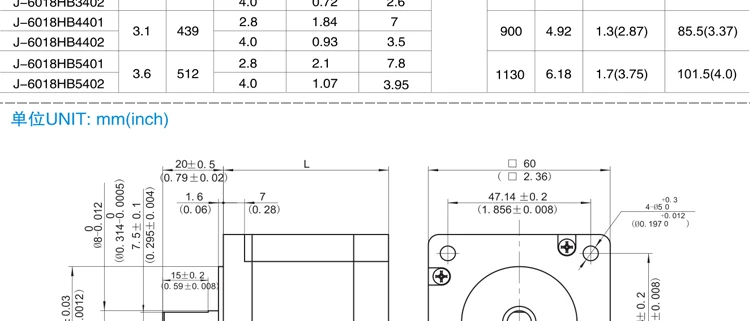
Как выбрать шаговый двигатель для ЧПУ: критерии
- Индуктивность. Следует вычислить квадратный корень из индуктивности обмотки и умножить его на 32. Полученное значение нужно сравнить с напряжением источника питания для драйвера. Различия между этими числами не должны сильно отличаться. Если напряжение питания на 30% и более превышает полученное значение, то мотор будет греться и шуметь. Если меньше, то крутящий момент будет слишком быстро убывать со скоростью. Большая индуктивность потенциально обеспечит возможность для большего крутящего момента. Однако для этого потребуется драйвер с большим напряжением питания.
- График зависимости крутящего момента от скорости. Позволяет определить, удовлетворяет ли выбранный двигатель условиям в техническом задании.
- Геометрические параметры. Имеет значение длина двигателя, фланец и диаметр вала.
Совет: также следует обратить внимание на омическое сопротивление фаз, номинальный ток в фазе, момент инерции ротора, максимальный статический синхронизирующий момент.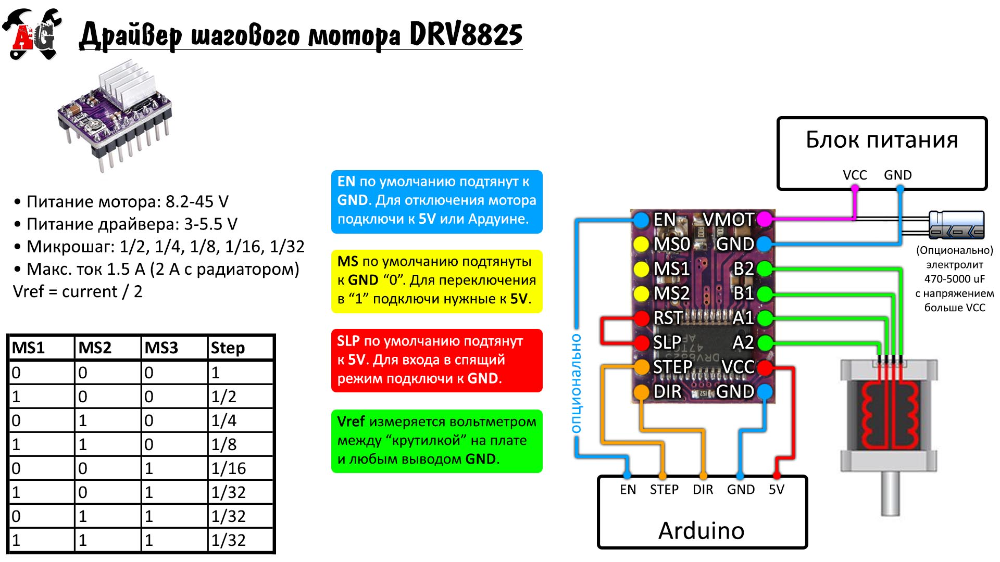
Тип двигателя
Важный критерий – тип шагового двигателя для ЧПУ станка. Широко распространены биполярные, униполярные и трехфазные модели. Каждая из них имеет свои особенности:
- биполярные чаще всего используют для ЧПУ благодаря простому подбору нового драйвера при выходе старого из строя, высокому удельному сопротивлению на малых оборотах;
- трехфазные отличаются большей скоростью, чем биполярные аналогичного размера. Подходят для случаев, когда требуется высокая скорость вращения;
- униполярные представляют собой несколько видов биполярных двигателей в зависимости от подключения обмоток.
Совет: еще один способ подбора двигателя – анализ готовых станков на рынке, которые близки по размерам и другим характеристикам к разрабатываемому.
Примеры расчетов шаговых двигателей для ЧПУ
Определяем силы, действующие в системе
Необходимо определить силу трения в направляющих, которая зависит от используемых материалов.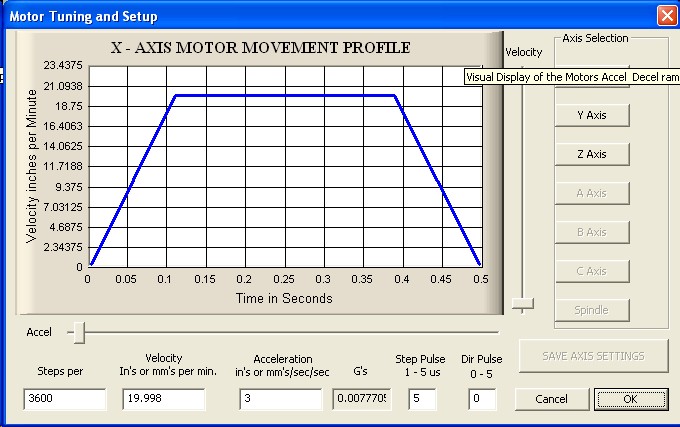 Для примера коэффициент трения составляет 0.2, вес детали – 300 кгс, вес стола – 100 кгс, необходимое ускорение – 2 м/с2, сила резания – 3 000 Н.
Для примера коэффициент трения составляет 0.2, вес детали – 300 кгс, вес стола – 100 кгс, необходимое ускорение – 2 м/с2, сила резания – 3 000 Н.
- Чтобы рассчитать силу трения нужно умножить коэффициент трения на вес движущейся системы. Для примера: 0.2 x 9.81 (100 кгс+300 кгс). Получается 785 Н.
- Чтобы рассчитать силу инерции надо умножить массу стола с деталью на требуемое ускорение. Для примера: 400 x 2 = 800 Н.
- Чтобы рассчитать полную силу сопротивления надо сложить силы трения, инерции и резания. Для примера: 785 + 800 + 3 000. Получается 4 585 Н.
Справка: силу сопротивления должен развивать привод стола на гайке шариковой винтовой передачи.
Рассчитываем мощность
Формулы, приведенные ниже, представлены без учета инерции вала самого шагового двигателя и других вращающихся механизмов. Поэтому для большей точности рекомендуется увеличить или убавить требования по ускорению на 10%.
Для расчета мощности шагового двигателя следует воспользоваться формулой F=ma, где:
- F – сила в ньютонах, необходимая для того, чтобы привести тело в движение;
- m – масса тела в кг;
- а – необходимое ускорение m/c2.

Для определения механической мощности необходимо умножить силу сопротивления движения на скорость.
Совет: существуют калькуляторы для автоматического расчета мощности.
Рассчитываем редукцию оборотов
Определяется на основании номинальных оборотов сервопривода и максимальной скорости перемещения стола. Например, скорость перемещения составляет 1 000 мм/мин, шаг винта шариковой винтовой передачи – 10 мм. Тогда скорость вращения винта ШВП должна быть (1 000 / 10) 100 оборотов в минуту.
Для расчета коэффициента редукции учесть номинальные обороты сервопривода. Например, они равны 5 000 об/мин. Тогда редукция будет равна (5 000 / 100) 50.
Классификация шаговых двигателей для ЧПУ
Советские модели
В станках часто применяют шаговые двигатели индукторного типа, изготовленные в СССР. Речь о моделях ДШИ-200-2 и ДШИ-200-3. Они обладают следующими характеристиками:
| Параметр | ДШИ-200-2 | ДШИ-200-3 |
|---|---|---|
| Потребляемая мощность | 11. 8 Вт 8 Вт | 16.7 Вт |
| Погрешность обработки шага | 3% | 3% |
| Максимальный статический момент | 0.46 нт | 0.84 нт |
| Максимальная чистота приемистости | 1 000 Гц | 1 000 Гц |
| Напряжение питания | 30 В | 30 В |
| Ток питания в фазе | 1.5 А | 1.5 А |
| Единичный шаг | 1.8 град | 1.8 град |
| Масса | 0.54 кг | 0.91 кг |
При выборе следует обратить внимание на наличие индекса ОС. Это особая серия с военной приемкой. Имеет более высокое качество исполнения, чем обычные модели.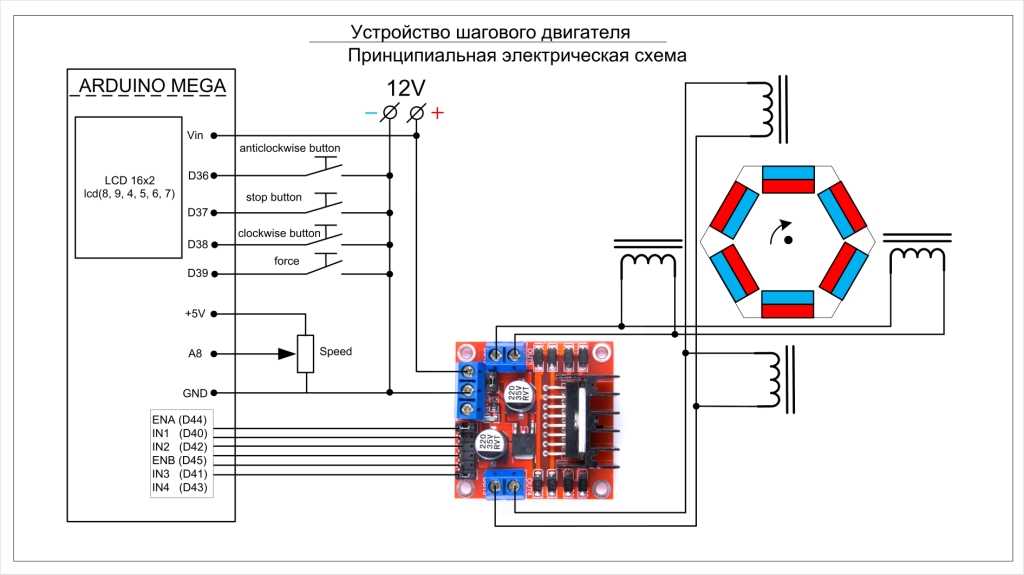
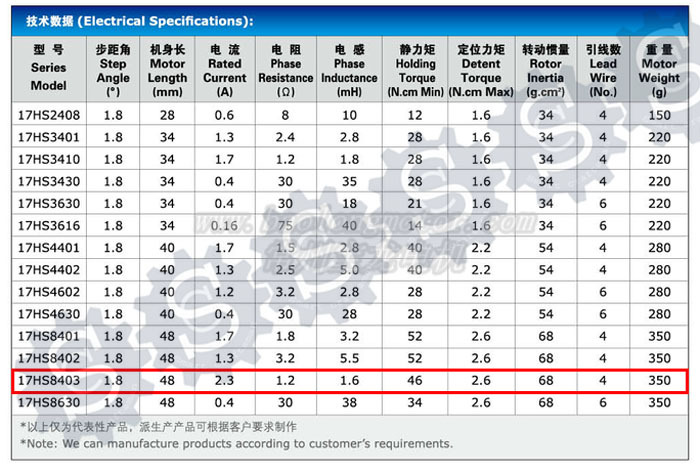
Китайские модели
Примеры китайских шаговых двигателей для ЧПУ и их характеристики представлены ниже.
| Параметр | Модель | ||
|---|---|---|---|
| JKM Nema 17 42mm Hybrid Stepper Motor | JK42HS48-2504 | JK42HS40-1704 | |
| Длина, мм | 48 | 40 | 34 |
| Ток питания в фазе, А | 2.5 | 1.7 | 1.33 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Масса, кг | 0.34 | 0.32 | 0.22 |
Биполярные шаговые двигатели для ЧПУ от CNC Technology
| Параметр | Модель | ||
|---|---|---|---|
| 86HS156-5004 | 57HS76-3004 | 42HS48-1704A | |
| Ток питания в фазе, А | 5 | 3 | 1. 7 7 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Индуктивность, мГн | 6 | 3.5 | 2.8 |
| Диаметр вала | 14 | 8 | 5 |
Зная критерии выбора и ориентируясь в предложениях по шаговым двигателям на рынке можно подобрать подходящую модель для станка ЧПУ. Главное – покупать у проверенных поставщиков.
3 причины купить шаговый двигатель для ЧПУ в компании CNC Technology
- Двигатели от надежных производителей, эти же двигатели мы используем в наших станках.
- Всегда в наличии на складе.
- Комплексность: в нашем каталоге можно подобрать не только ШД, но и драйверы, датчики, соединительные муфты и другие комплектующие.

Получить консультацию по выбору шагового двигателя можно по телефону 8 (800) 350 33 60.
Калькулятор RepRap
— оригинальные 3D-принтеры Prusa
Привет, я калькулятор. Я помогу вам рассчитать реальную цену филамента в пересчете на объем печати (в кубических сантиметрах), количество шагов на миллиметр и ускорение, необходимое для достижения определенной скорости печати.
Реальная цена на нить
РАБОТА В ПРОГРЕССЕ! Отличный инструмент для сравнения реальной цены на нить. Единственным измерением, которое точно скажет вам, сколько вы можете напечатать с купленной нитью, является объем в см 3 . Продавцы нитей должны указывать цену за см 3 , чего сейчас не происходит. Поэтому я сделал этот простой инструмент для вас, чтобы вычислить его.
Пример: Вам предлагается 100 м PLA толщиной 3 мм и 1,75 мм за 25 долларов. С 3 мм вы купите 2827 см 3 , а с 1,75 мм только 962 см 3 пластика. Это делает 1,75-миллиметровую сделку довольно ужасной, поскольку вы получите только одну треть по той же цене.
С 3 мм вы купите 2827 см 3 , а с 1,75 мм только 962 см 3 пластика. Это делает 1,75-миллиметровую сделку довольно ужасной, поскольку вы получите только одну треть по той же цене.
Название нити
Вес
Длина
Диаметр
Предустановки диаметра
2,95 мм1,75 мм
Материал — задает плотность для расчетов
ABS — 1,08 г/см 3 PLA - 1,3 г/см 3
Плотность
Цена упаковки
| Название нити | Цена за см 3 | Общий объем см 3 | Общий вес кг | Тестовые свистки печатные (2,6 см 3 ) |
|---|---|---|---|---|
| Нить Prusa | 0,001 $ | 1000 см 3 | 1 кг | ??? |
Шаговые двигатели
Шагов на миллиметр — системы с ременным приводом
Теоретически результат правильный, но вам может потребоваться откалибровать машину, чтобы получить мельчайшие детали. Это хорошее начало.
Это хорошее начало.
Если вам сложно пользоваться этим калькулятором, попробуйте задать на форуме ℹ шагов на мм.
Угол шага двигателя
1,8° (200 за оборот) 0,9° (400 за оборот) 7,5° (48 за оборот)
Микрошаг драйвера
1 — полный шаг 1/2 — половинный шаг 1/4 — четверть шага 1/8 — uStep (в основном Gen6) 1/16 — uStep (в основном Pololu) 1/16 — uStep (смузиборд) 1/32 — uStep (сумасшедший смузиборд)
Шаг ремня (в мм)
Предустановки ремня
Шаг 2 мм (в основном GT2) Ремень MXL (2,03 мм) T2,5 (2,5 мм) Шаг 3 мм (GT2, HTD) Шаг 5 мм (T5, GT2, HTD) Ремень 0,2 дюйма XL (5,08 мм)
Количество зубьев шкива
| Результат | Разрешение | Зубья | Угол шага | Шаг | Пояс |
|---|---|---|---|---|---|
| 0 Нажмите, чтобы поделиться! | мкм | 0 | 0° | 1/0 | 0 мм |
Пример:
M92 G-код позволяет установить количество шагов на миллиметр в режиме реального времени. Вот пример с вашим результатом для оси X.
Вот пример с вашим результатом для оси X.
М92 Х0
Шагов на миллиметр — системы с ходовым винтом
Указывает количество шагов, которые должна произвести электроника, чтобы сместить ось на 1 мм.
Если вам сложно пользоваться этим калькулятором, попробуйте задать на форуме ℹ шагов на мм.
Угол шага двигателя
1,8° (200 за оборот) 0,9° (400 за оборот) 7,5° (48 за оборот)
Микрошаг драйвера
1 — полный шаг 1/2 — половинный шаг 1/4 — четверть шага 1/8 — uStep (в основном Gen6) 1/16 — uStep (в основном Pololu) 1/16 — uStep (смузиборд) 1/32 — uStep (сумасшедший смузиборд)
Шаг ходового винта
мм/оборот
Предустановки шага
M8 — метрические (1,25 мм на один оборот) M6 — метрические (1 мм на один оборот) M5 — метрические (0,8 мм на один оборот) 12 (12 мм на один оборот) 16 (16 мм на один оборот) 25 (25 мм на один оборот) 5/16″-18 дюймовая грубая (1,41111 мм на оборот)3/16″-20 британская (1,270 мм на оборот)1/4″-16 Acme (1,5875 мм на оборот)
Передаточное число
| Результат | Шаг ходового винта | Угол шага | Шаг | Передаточное отношение |
|---|---|---|---|---|
| 0 Нажмите, чтобы поделиться! | 8 | 1,8° | 1/16 | 2 : 2 |
Пример:
M92 G-код позволяет установить количество шагов на миллиметр в режиме реального времени. Вот пример с вашим результатом для оси X.
Вот пример с вашим результатом для оси X.
M92 Z0
Оптимальная высота слоя для вашей оси Z
Помогает вам выбрать высоту слоя таким образом, чтобы ось Z перемещалась только на полный шаг. Ось Z обычно не включается во время бездействия. Если ось отключена во время микрошага, ось переходит к ближайшему полному шагу и вызывает ошибку. Этот эффект в некоторой степени проявляется даже при включенных двигателях оси Z. Это наиболее полезно для машин с дюймовыми ходовыми винтами, а также для нестандартной высоты слоя с метрическими ходовыми винтами.
Угол шага двигателя
1,8° (200 за оборот) 0,9° (400 за оборот) 7,5° (48 за оборот)
Требуемая высота слоя
Шаг ходового винта
мм/оборот
Предустановки шага
M8 — метрические (1,25 мм на один оборот) M6 — метрические (1 мм на один оборот) M5 — метрические (0,8 мм на один оборот) 12 (12 мм на один оборот) 16 (16 мм на один оборот) 25 (25 мм на один оборот) 5/16″-18 дюймовая грубая (1,41111 мм за оборот) 3/16″-20 дюймовая (1,270 мм за оборот) 1/4″-16 Acme (1,5875 мм за оборот)
Передаточное число
| Высота слоя | Ошибка более 10 см | Количество шагов | Длина шага |
|---|---|---|---|
| 0 | 8 мм | 8 | 1,8 мм |
| 0 | 8 мм | 8 | 1,8 мм |
| 0 | 8 мм | 8 | 1,8 мм |
Ускорение
Max Speed
Введите параметры ускорения, расстояние/длину оси, и вы увидите, что ваш принтер будет достигать желаемой скорости и как долго.
Ускорение
Расстояние или длина оси
Желаемая скорость
шагов GRBL на миллиметр — как настроить параметры
Самостоятельная обработка > Без категорий > Шаги GRBL на мм — как отрегулировать настройки
У вас есть начальный набор значений для ваших настроек шагов GRBL на мм? Готовы ли вы уточнить эти настройки, чтобы добиться еще большей точности от вашей машины? Если да, то этот пост для вас. Если у вас нет начального набора настроек шагов GRBL на мм, не проблема. Нажмите здесь, чтобы сгенерировать начальные настройки шагов на миллиметры.
Когда у вас есть начальный набор шагов GRBL на миллиметр (шаг/мм), мы можем приступить к точной настройке машины. Опять же, если вы не рассчитали свои первоначальные настройки, нажмите здесь. Метод, описанный ниже, требует довольно точных настроек. Мы не хотим, чтобы машина переместилась на 2 дюйма, когда мы говорим ей переместиться на 1 дюйм.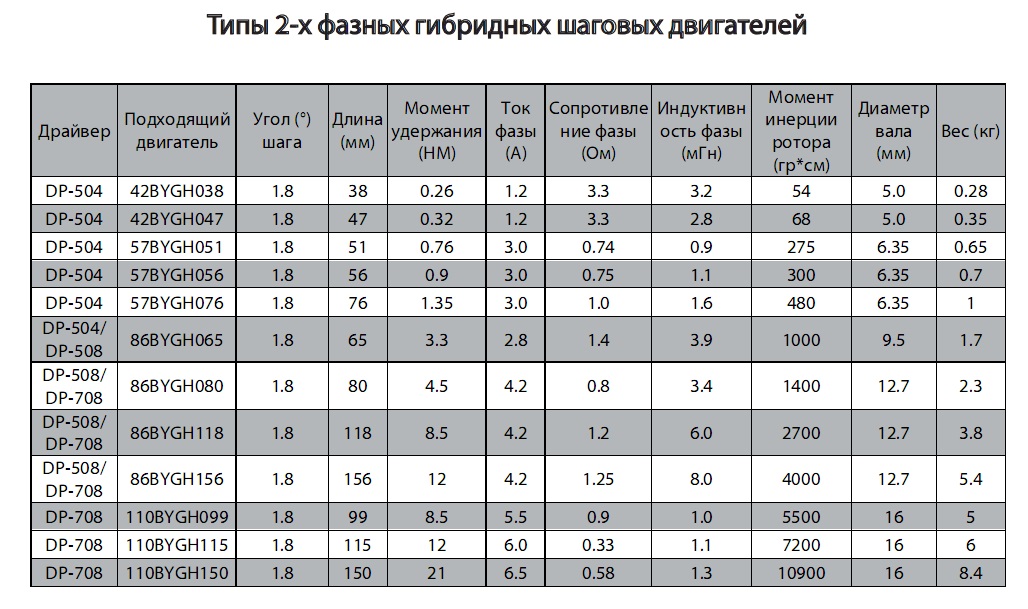 Мы можем сломать наш измерительный инструмент.
Мы можем сломать наш измерительный инструмент.
Что вам нужно
Прежде чем мы двинемся дальше, вам понадобится циферблатный индикатор. Я использую тот, что показан ниже. Это недорогая базовая установка, которая выполнит свою работу. Вы можете найти более дорогие индикаторы и базы.
Индикатор часового типа с магнитным основанием
Подойдет практически любой индикатор часового типа. Если у вас уже есть отличный, используйте его. Я обнаружил, что циферблатные индикаторы с ходом не менее 1 дюйма лучше всего подходят для этого процесса настройки. Индикаторы с ходом менее 1 дюйма делают расстояние измерения слишком маленьким. Это делает приведенную ниже математику более сложной и чувствительной к крошечным изменениям показаний индикатора.
Есть и другие способы сделать это без циферблатного индикатора, но они включают в себя механическую обработку детали и последующее ее измерение. Учитывая итеративный характер этого процесса, он займет значительно больше времени.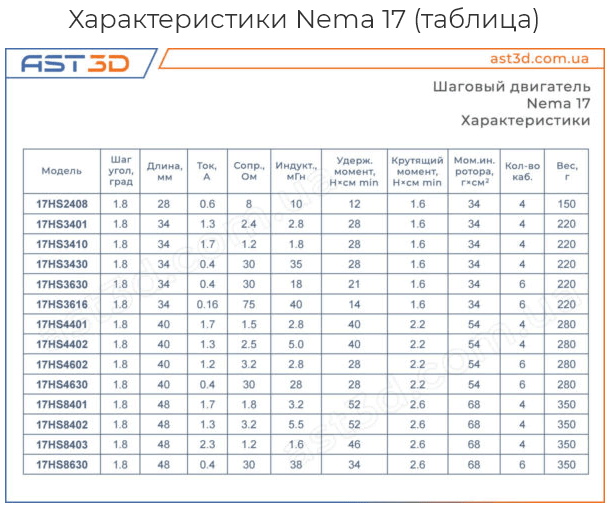
Введение
Цель состоит в том, чтобы настроить параметры шага GRBL на миллиметр (шаг/мм) для каждой оси независимо.
Например, мои исходные расчетные настройки были следующими:
100$=314,960 (x, шаг/мм)
101$=314,960 (y, шаг/мм)
102$=78,740 (z, шаг/мм)
Вы можете увидеть, как я их вычислил, нажав здесь.
Когда я закончил процесс настройки каждой оси, новые настройки были…
$100=316,220 (x, шаг/мм)
$101=315,361 (y, шаг/мм)
$102=79,136 (z, шаг/мм)
Как видите, настройки существенно не отличаются. Тем не менее, я заметил улучшение точности машины. То есть, когда я проектирую деталь в CAD длиной 2 дюйма, готовая обработанная деталь намного ближе к 2 дюймам, чем до того, как я сделал эти обновления.
Обзор
1. Запишите текущие настройки GRBL
2. Настраивайте одну ось за раз
3. Установите циферблатный индикатор параллельно оси, которую вы настраиваете
4. Обнулите циферблатный тестовый индикатор
Обнулите циферблатный тестовый индикатор
5. Обнулите ось на контроллере станка
6. Переместите станок в толчковом режиме на 1 дюйм
Внимание – EN
уверен вы не меняете направление движения между обнулением индикатора и толчковым движением машины. Это приведет к тому, что люфт вашей машины будет включен в измерения, что вызовет проблемы.
7. Считайте циферблатный индикатор, чтобы определить фактический ход машины
8. Отрегулируйте шаг GRBL на мм (шаг/мм), используя приведенную ниже формулу
9. Подтвердите, что настройки GRBL были обновлены
10. Повторите тест, начиная с шага 3, чтобы подтвердить новые настройки
Как Сделайте это…
Первый шаг — записать текущие настройки GRBL вашей машины. Если мы ошибемся, мы можем вернуться к ним и начать заново.
Для этого необходимо включить компьютер и после установления соединения с Arduino ввести $$ в командное окно Universal Gcode Sender. Это распечатает текущие настройки GRBL в окне дисплея. С помощью курсора мыши выделите эти настройки и скопируйте их в файл .txt. Я использую Windows, поэтому я использую Блокнот.
Это распечатает текущие настройки GRBL в окне дисплея. С помощью курсора мыши выделите эти настройки и скопируйте их в файл .txt. Я использую Windows, поэтому я использую Блокнот.
Затем я установил циферблатный индикатор на своей машине, чтобы я мог измерять движение по оси X. См. рисунок ниже конфигурации, которую я использовал для измерения. В зависимости от размера и конфигурации вашей машины ваши настройки могут отличаться. Обратите внимание, у меня нет циферблатного индикатора, касающегося шпинделя. Я сделал это намеренно. Шпиндель круглый и плохо контактирует с концом циферблатного индикатора. Вместо этого я использовал плоскую часть головки мельницы. Это работает, потому что шпиндель и головка двигаются вместе. Ключевым моментом является установка циферблатного индикатора параллельно оси, которую вы настраиваете. Мы хотим настраивать только одну ось за раз.
После того, как вы настроите циферблатный индикатор, запустите машину так, чтобы циферблатный индикатор показывал 0 с оставшимся как минимум 1 доступным ходом.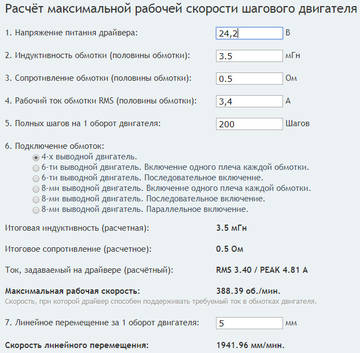 Я считаю, что легче запустить машину, чтобы обнулить циферблатный индикатор, чем повернуть циферблат, потому что это приводит к смещению настройки. Затем нажмите кнопку нуля X в универсальном отправителе Gcode (UGS), а затем переместите машину на 1 дюйм в том же направлении с помощью программного обеспечения для управления машиной. Убедитесь, что цифровые показания показывают, что машина переместилась на 1 дюйм.
Я считаю, что легче запустить машину, чтобы обнулить циферблатный индикатор, чем повернуть циферблат, потому что это приводит к смещению настройки. Затем нажмите кнопку нуля X в универсальном отправителе Gcode (UGS), а затем переместите машину на 1 дюйм в том же направлении с помощью программного обеспечения для управления машиной. Убедитесь, что цифровые показания показывают, что машина переместилась на 1 дюйм.
Примечание. Важно, чтобы вы двигали машину в том же направлении, в котором вы двигались, когда обнаружили ноль на циферблатном индикаторе. Мы не хотим бегать в положительном и отрицательном направлении, чтобы установить циферблатный индикатор на ноль. Это может привести к тому, что люфт в машине повлияет на ваши измерения. Вы можете в конечном итоге гоняться за своим хвостом. Не весело!
Вкладка «Управление машиной» — универсальный отправитель кода Gcode (UGS)
Теоретически, если машине только что сказали сдвинуться на 1 дюйм, циферблатный индикатор также должен показывать 1 дюйм.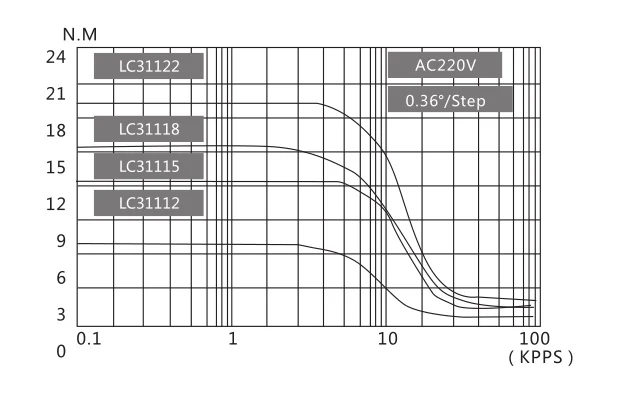 Если это так, велика ваша машина совершенна. Вы сделали, не нужно читать или делать что-то еще.
Если это так, велика ваша машина совершенна. Вы сделали, не нужно читать или делать что-то еще.
Если нет, то вам нужно посмотреть, сколько на самом деле показывает циферблатный индикатор.
В моем случае индикатор показал 0,997 дюйма, что говорит мне о том, что машина проехала на 0,003 дюйма меньше, чем ожидалось. Поэтому мне нужно увеличить количество шагов/мм. Вы можете спросить, как мне узнать, насколько нужно изменить настройку шагов/мм?
Для этого существует простая формула…
Обновленные Шаги/мм = (Текущие Шаги/мм) x (Заданный Ход) / Показания циферблатного индикатора
Текущие Шаги/мм – Текущие настройки GRBL
Показания циферблатного индикатора — фактическое расстояние, пройденное машиной
Заданный ход — расстояние, которое машина должна пройти от интерфейса компьютера
Обновленные шаги/мм — новое значение, которое вы вводите в GRBL быть еще проще, если вы всегда даете системе команду двигаться на 1”.
Тогда формула принимает вид…
Обновленные шаги/мм = (текущее количество шагов/мм) / (показания циферблатного индикатора)
думал о том, что происходит. Если ваше фактическое измерение с помощью циферблатного индикатора меньше ожидаемого, это означает, что вам необходимо увеличить настройку количества шагов на миллиметр. Контроллер вашего станка получает команду на расстояние, а затем рассчитывает, на сколько шагов нужно повернуть шаговый двигатель. GRBL использует этот шаг/мм для выполнения этого расчета. Если это значение меньше необходимого, меньше шагов на единицу расстояния, то расчет скажет, что требуется меньше шагов для перемещения на желаемое расстояние.
Если ваше фактическое измерение с помощью циферблатного индикатора меньше ожидаемого, это означает, что вам необходимо увеличить настройку количества шагов на миллиметр. Контроллер вашего станка получает команду на расстояние, а затем рассчитывает, на сколько шагов нужно повернуть шаговый двигатель. GRBL использует этот шаг/мм для выполнения этого расчета. Если это значение меньше необходимого, меньше шагов на единицу расстояния, то расчет скажет, что требуется меньше шагов для перемещения на желаемое расстояние.
Может потребоваться несколько минут, чтобы прийти в себя. Не стесняйтесь экспериментировать с различными настройками на вашем компьютере. Вы всегда можете изменить их.
Это повторяющийся процесс, и мне пришлось повторить его несколько раз, пока я не смог получить повторяемые результаты. Получив новое значение шагов GRBL на миллиметр из приведенного выше уравнения, обновите настройки GRBL.
Для оси X это делается в командной строке универсального отправителя Gcode путем ввода $100 = «новое значение» без кавычек и нажатия клавиши ввода.