Содержание
Построение пусковой диаграммы
Построение
пусковой диаграммы и определение
пусковых сопротивлений выполняют
аналитическим или графическим методами.
Аналитический метод применяется при
высокой линейности механических
характеристик. Графический метод в
большей степени учитывает нелинейность
механической характеристики и отличается
от аналитического тем, что после расчета
максимального момента (М1)
и момента переключения (М2)
правильная пусковая диаграмма строится
путем последовательных приближений с
корректировкой значений М2.
1.
Определяю значение момента М1
через
найденное ранее значение МН.
Для этого используется заданная в табл.2
кратность пускового момента М1/МН
=2
М1
=
2*175,99= 351,98
Рассчитываю
величину момента переключения М2:
,
где
,
аm
– число пусковых ступеней, равное в
данной работе для всех вариантов 3 (m=3).
α=
М2
=
351,98/2,12=166,03 Н·м
Строю
пусковую диаграмму привода в координатах
естественной механической характеристики.
Рис.3
Графический расчет пусковой диаграммы.
Расчет пусковых параметров электропривода.
К
расчетным пусковым параметрам
электропривода в первую очередь относятся
значения сопротивлений пусковых
реостатов и время пуска.
Значения
сопротивлений отдельных секций пусковых
реостатов определяется с помощью
построенной пусковой диаграммы, лучи
которой разбили вертикальные линии
моментов М1,
М2
на ряд отрезков (ac,
ce,
eg),
соотношение длин которых пропорционально
соотношению сопротивлений секций.
Определяю
значения сопротивлений секций по
следующим формулам:
RG1
= ac
mR;
RG2
= ce
mR;
RG3
= eg
mR,
где
mR
–
масштаб сопротивлений равный: mR
= RP
/ gh.
RP
— активное сопротивление одной фазы
обмотки ротора, определяемое по формуле:
,
где
Е2К
–
напряжение между кольцами двигателя,
а I2H—
ток ротора при полученном значении ПВ.
Оба параметра определяются из технических
данных электродвигателей серии MTF
(табл.3).
Значения
ac,
ce,
eg,
gh
беру из пусковой диграммы.
Для
определения времени пуска необходимо
выполнить приведение момента инерции
механизма к валу двигателя по формуле:
=
1,25 + 1,75 * (42 / 99,43)2
= 1,56 кгс*м
момент
инерции двигателя JДВ
=
(CD)2/4
= 1,25; (CD)2/4
– маховый момент двигателя
момент
инерции механизма JМЕХ
= 1,75;
Номинальная
скорость вращения механизма wМЕХ
=42 рад/c;
Номинальная
скорость вращения двигателя
wДВ
= nДВ/30
= 3,14*950/30=99,43 рад/с.
Рассчитываю
время пуска двигателя из неподвижного
состояния до рабочей скорости (wДВ),
считая, что двигатель разгоняется под
действием среднеарифметического
момента.
Вместо
момента М2
использую уточненный момент М/2.
МСР
= (М1
+ М/2)/2=(351,98+210)/2=280,99
а
момент статического сопротивления
механизма
МС
РС1
/
wДВ.=3750/99,43=37,7
Тогда
время пуска двигателя равно:
tП
=
J
wДВ
/( МСР
— МС)=1,5699,43/(280,99-37,7)=0,64
Задание №2.
«Исследование
стабильности регулирования скорости
электропривода в замкнутых и разомкнутых
системах»
Первая | 5 |
Тип | 43 |
Коэффициент | 500 |
Вторая | 9 |
Скорость | 220 |

Тип | 43 |
Номинальная | 3,8 |
Номинальная | 230 |
Номинальное | 220 |
Номинальный | 19,5 |
Номинальный | 16,5 |
Номинальный | 88,3 |
Коэффициент | 0,9 |
Сопротивление | 0,63 |
Суммарное
сопротивление якорной цепи принимаю
равным
RЯЦ
=2,1RЯ=2,1*0,63=
1,323
где
RЯ
—
сопротивление
якорной обмотки нагретого двигателя,
выбираемое из табл.
Задающее
напряжение в замкнутой системе вычисляю
из соотношения
UЗЗС
= w0
· (1+KC/C)
/ (KC/C)=
220 · (1+0,04500/0,9)
/ (500/0,9)=8,36
где
Кс
=
Кус · Кув — коэффициент
усиления системы электропривода;
С=КФ
—
коэффициент двигателя;
—
коэффициент
обратной связи по скорости = 0,04 Вс.
Задающее
напряжение в замкнутой системе вычисляется
из соотношения
UЗРС
= w0
· C
/ KC
= 220 · 0,9 / 500=0,396
которое
вытекает из соотношения для замкнутой
системы при
=0.
Уравнение
механической характеристики в
разомкнутой системе определяется
известным уравнением
WРС=UЗРСКС/С
— МRЯЦ/С2=
220 – М1,323/0,92=220-1,63М
где
UЗРСКС/С=
w0=220.
Механическую
характеристику w=f(M)
для
разомкнутой системы можно построить
по двум точкам, т.к. она представляет
собой прямую линию. Координаты первой
точки w=
w0,
М=0,
координаты
второй w=w(MН),
М=МН.
Уравнение
механической характеристики в
замкнутой системе определяется уравнением
WРС=UЗЗСКС/(С+KC)
— МRЯЦ/С(С+KC)=
=220
– М1,323/(0,9(0,9+0,04500))=220-0,07М
где
UЗЗСКС/(С+KC)=w0=220.
Механическую
характеристику w=f(M)
для
замкнутой системы также можно построить
по двум точкам, т.к. она представляет
собой прямую линию. Координаты первой
точки w=
w0,
М=0,
координаты
второй w=w(MН),
М=МН.
Для
разомкнутой системы:
M | 0 | 16,5 |
w | 220 | 193,1 |
Для
замкнутой системы :
M | 0 | 16,5 |
w | 220 | 218,8 |
По
результатам расчета механических
характеристик для разомкнутой и
замкнутой систем строю механические
характеристики в соответствии с рис.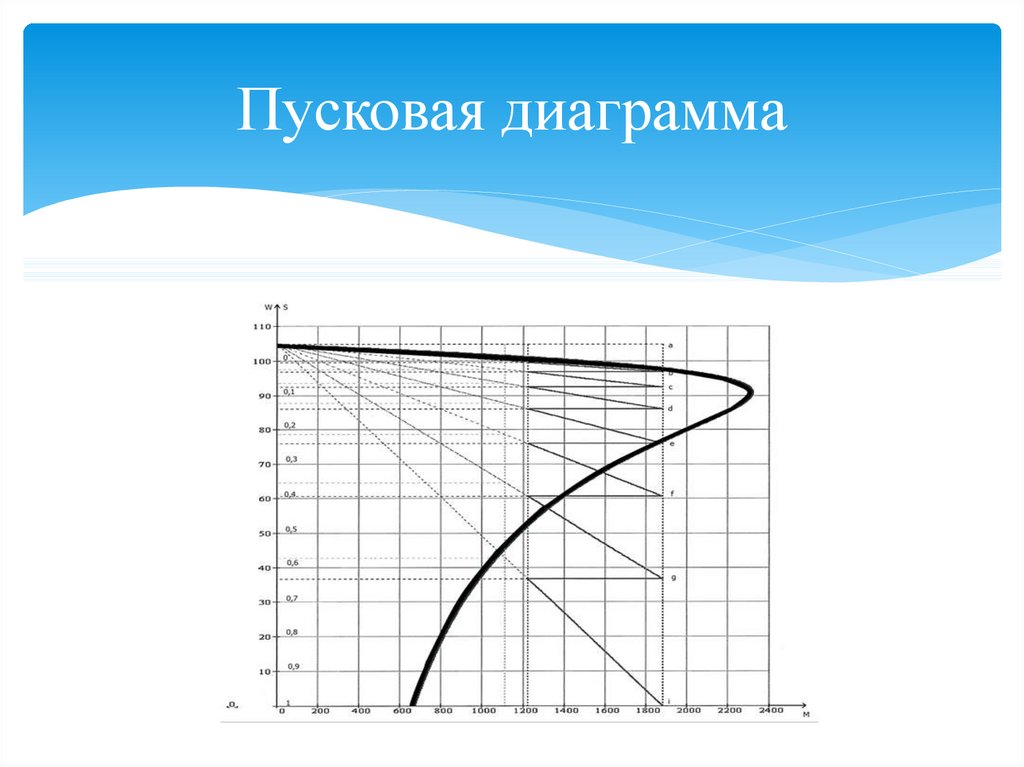
4.
Рис.4.Механические
характеристики для
разомкнутой (2) и замкнутой(1) систем
регулирования.
Используя
данные полученных механических
характеристик рассчитываю параметры
статизма в разомкнутой
и замкнутой системах управления.
wР
/
w0
=
26,95/220=0,122;
wЗ
/
w0
=1,16/220=0,0053.
Расчет пусковых резисторов для электродвигателей постоянного тока
Похожие презентации:
Грузоподъемные машины. (Лекция 4.1.2)
Зубчатые передачи
Гидравлический домкрат в быту
Детали машин и основы конструирования
Газораспределительный механизм
Свайные фундаменты. Классификация. (Лекция 6)
Ременные передачи
Редукторы
Техническая механика. Червячные передачи
Фрезерные станки. (Тема 6)
СЕВАСТОПОЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Кафедра «ВОЗОБНОВЛЯЕМЫЕ ИСТОЧНИКИ ЭНЕРГИИ И
ЭЛЕКТРИЧЕСКИЕ СИСТЕМЫ И СЕТИ»
Дисциплина:
«Автоматизированный электрический привод»
Практическое занятие № 1:
Расчет пусковых резисторов для
электродвигателей постоянного тока
Доцент кафедры к. т. н.
т. н.
ГОРПИНЧЕНКО Александр Владимирович
ВОПРОСЫ
1
1) Расчет пусковых резисторов для электродвигателей
постоянного тока параллельного возбуждения.
2) Расчет пусковых резисторов для электродвигателей
постоянного тока смешанного возбуждения
ЛИТЕРАТУРА
1. М.Г.Чиликин, А.С.Сандлер «Общий курс электропривода».
М.: Энергоиздат, 1981 г.
2. Электротехнический справочник. Под редакцией П.Г.
Грудинского и др. том 2. – М.: Издательство МЭИ, 2003 г.
1. Расчет пусковых резисторов для электродвигателей
постоянного тока параллельного возбуждения.
2
Ток якоря двигателя определяется выражением:
U E
Ia
Ra ,
(1)
где U –напряжение, подводимое к якорю,
Е – ЭДС обмотки якоря,
Rа – сопротивление обмотки якоря.
Так как при пуске угловая скорость вращения якоря Ω=0, то и
E = k ∙ Ф ∙ Ω = 0.
(2)
Здесь k – коэффициент пропорциональности,
Ф – магнитный поток возбуждения ЭД.
Значение пускового тока ЭД I пуск
U
действительно будет большим
Ra
в виду малости сопротивления обмотки якоря Rа (в зависимости от
мощности ЭД становит десятые, сотые доли Ома).
3
Рис. 1. Электрическая схема включения пускового резистора.
Число ступеней z пускового резистора при пуске ЭД постоянного
тока берут следующим: Р ≤ 10 кВт – 1…2 ступени;
10кВт ≤ Р ≤ 30 кВт – 2..3 ступени;
Р ≥ 30 кВт – 3…4 ступени.
Расчет пусковых резисторов для ЭД параллельного
4
возбуждения выполняются в следующем порядке:
1. Выбирается величина тока переключения (минимальный
пусковой ток при котором производится шунтирование
ступеней пускового резистора).
Ток переключения должен на 20…50% быть больше тока
статической нагрузки Iс = Iн , чтобы обеспечить «энергичный»
разгон ЭД.
I2 = (1,2…1,5) Iн
(3)
2. Определяется максимальный пусковой ток по выражению
Uн
z
1
I1 I 2
(4)
I 2 Ra .
3. Производится проверка коммутационных возможностей
ЭД. Кратность максимального пускового тока по отношению к
номинальному его значению должна находиться в пределах:
I1
(2…2,5) .
Iн
4. Рассчитывается и строится естественная
Рассчитывается и строится естественная
5
электромеханическая характеристика ЭД (ЭМХ) .
ЭМХ строим по двум точкам: (Ω0, 0) и (Ωн, Iн).
Скорость идеального хода Ω0 определяется из аналитического
выражения
электромеханической
характеристики
для
номинального режима:
U н Rа
н
Iн
(5)
кФ кФ
0
Uн
кФ
кФ
U н I н Rа
н
,
(6)
,
Uн
0
н
U н I н Rа
(7)
[1/с]. (8)
Номинальное значение скорости вращения ЭД определяется по
nн
формуле:
н
(9)
30 .
5. Производится построение нормальной пусковой диаграммы ЭД.
Рис. 2 Пусковая диаграмма ЭД.
6
7
6. Из графического построения пусковой диаграммы
определяются сопротивления каждой ступени пускового
резистора.
На пусковой диаграмме отрезки вертикали, проведенной через
точку
(а),
заключенные
между
искусственными
характеристиками, соответствуют в определенном масштабе
ступенями пускового резистора в Омах.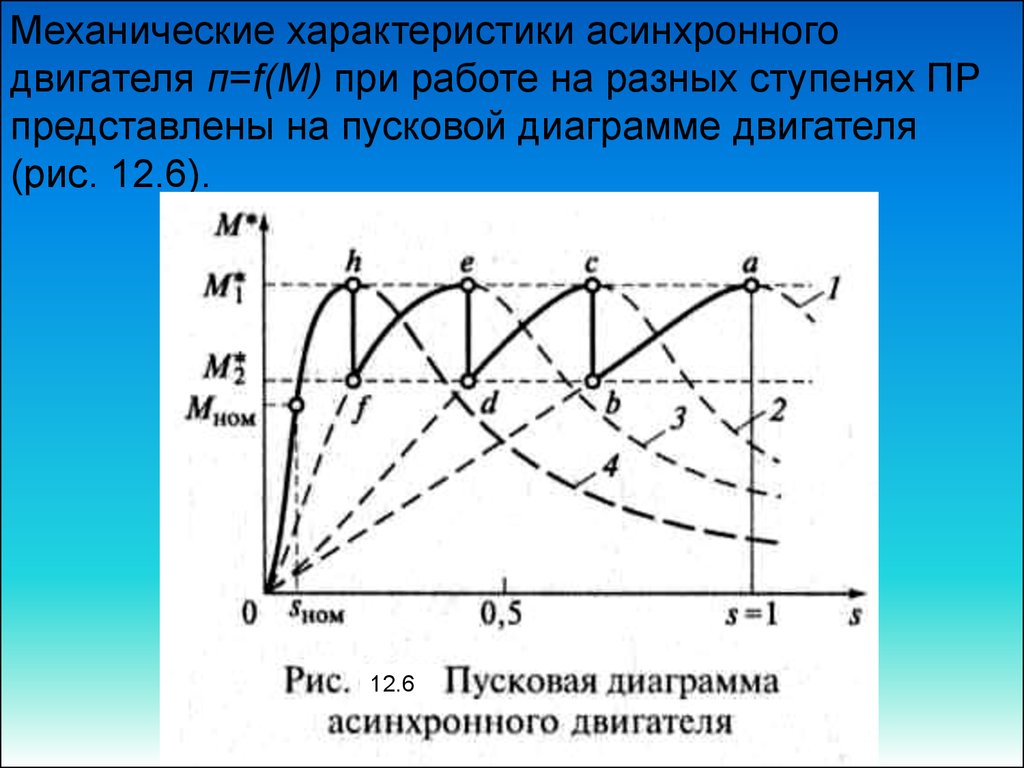
1) 2 0 I1Rа , 0 2 к Ra , е g Rа
кФ
2)
1 0
I1 ( Rа R2 )
,
кФ
mR
0 1 к ( Ra R2 ), c g
Rа R2
mR
3) 0 0 I1 ( Rа R1 R2 ) , 0 к ( Ra R1 R2 ), a g Rа R1 R2
кФ
mR
Масштаб сопротивлений резисторов находится из условия,
что
вертикаль
соответствует
полному
пусковому
сопротивлению ЭД.
R R R
(Ra + Σ RПi), т.е. mR а 1 2 .
ag
Так как
I1
Uн
Rа R1 R2
, то Rа R1 R2
Uн
mR
.
I1a g
Uн
I1
и
(10)
Сопротивления ступеней пускового резистора определяются
по выражениям:
(11)
R1 mR a c , [Ом], R2 mRc e , [Ом].
Расчет пускового резистора для двигателя: ЭД
при зашунтированной последовательной обмотке.
ДПМ31
В режиме ПВ=25%, Рн=12 кВт, Iн=65А, nн=1310 об/мин,
Uн=220В, Ra=1,9 Ом.
8
2. Расчет пусковых резисторов для электродвигателей (ЭД)
постоянного тока смешанного возбуждения.
9
Алгоритм расчета пусковых резисторов для ЭД смешанного
возбуждения осуществляется следующей последовательности :
1. Производится построение ЭМХ используя универсальные
Производится построение ЭМХ используя универсальные
характеристики υ=f(i) соответствующих серии электродвигателей
[2].
10
За базисные единицы принимаются номинальные данные
ЭД: Iн, Ωн.
Тогда I = iIн [A];
nн
Ω = υΩн [1/c], где н
.
(12)
30
Значениями относительного тока двигателя задаются
значения относительной частоты вращения ЭД, определяются
графическим путем из универсальных характеристик.
Результаты вычислений по формулам (12) сводятся в таблицу.
11
По данным таблицы
производится построение
ЭМХ (рис. 1).
Рис. 1.
2. Определяется внутреннее сопротивление двигателя.
Rg = Ra + Rco ,
(13)
где
Rco — сопротивление последовательной обмотки
возбуждения.
3. Выбираются значения наибольшего пускового тока I1 и тока
переключения ступеней I2:
I1 = (2…2,7) Iн , I2 = (1,2…1,5) Iн .
(14)
4. Производятся графические построения линий постоянства
наибольшего пускового тока и тока переключения ступеней
пускового резистора.