Содержание
устройство, принцип работы, режимы работы, пуск
Устройство
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
Рис. 1. Устройство синхронного электродвигателя
- Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
- Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.
- Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора.
 В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента. - Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке. В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
- Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
- Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.
 В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны. Конструкция включает в себя такие элементы, как:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
 На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Принцип работы
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
Рис. 2. Принцип действия синхронного электродвигателя
Как видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле. На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
Рис. 3. Принцип формирования потоков в синхронной электрической машине
При подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
- в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.
- в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
- в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.

Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2.722-68.
Рис. 4. Схематическое обозначение синхронного электродвигателя
Общий принцип действия
По соответствию основному исполнению, статор считается якорем машины и имеет многофазную обмотку, чаще всего, рассчитанную на три фазы. Он выступает в качестве индуктора, обмотка ротора (возбуждения) служит для создания потока магнитной индукции возбуждения, ее питание осуществляется при использовании контактных колец, через щеточный механизм, от источника (якоря возбудителя).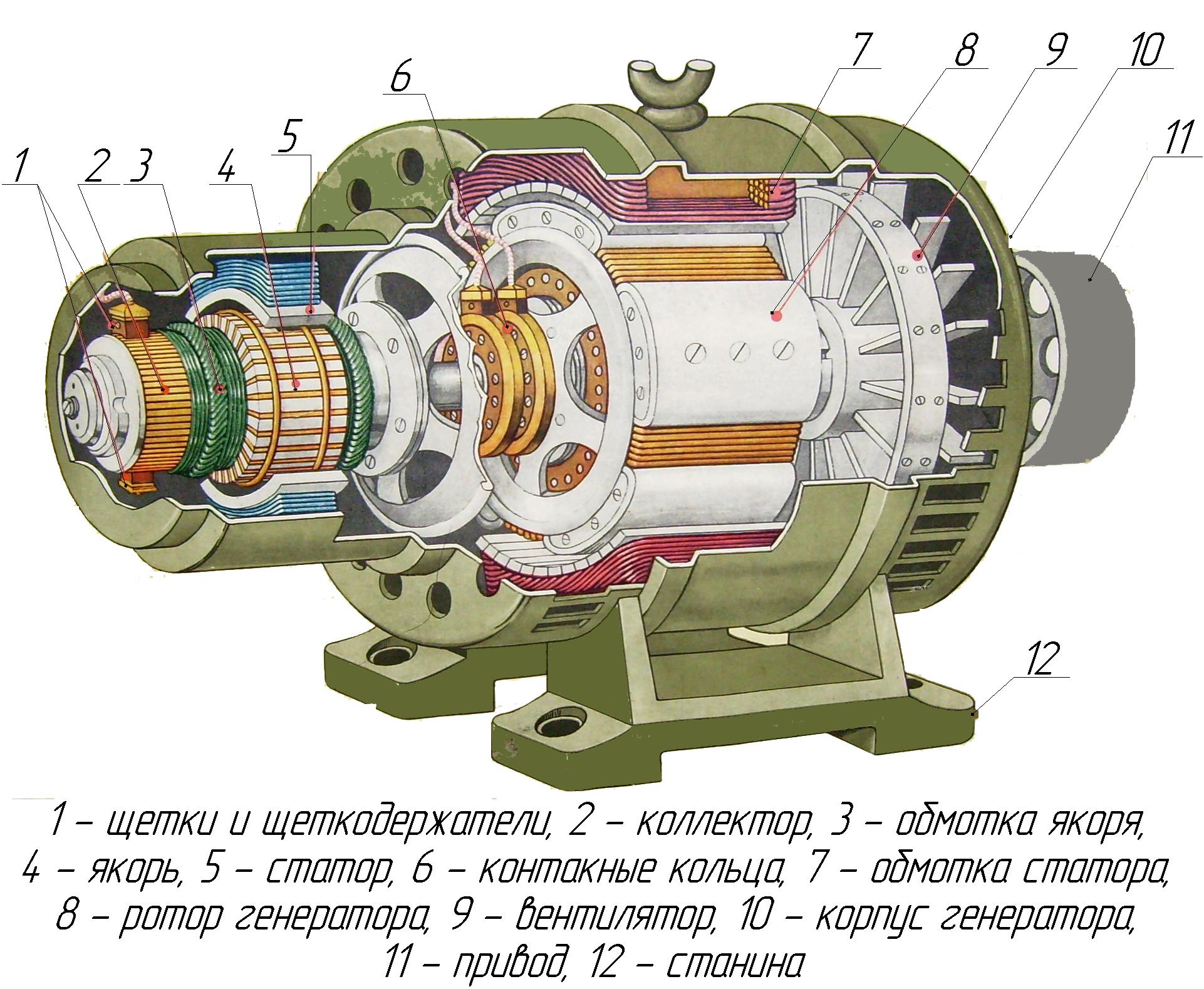 Конструктивное исполнение машины, прежде всего, зависит от необходимой частоты вращения, главным образом это сказывается на конструктивных особенностях ротора, он бывает двух основных видов, это явнополюсный и неявнополюсный типы.
Конструктивное исполнение машины, прежде всего, зависит от необходимой частоты вращения, главным образом это сказывается на конструктивных особенностях ротора, он бывает двух основных видов, это явнополюсный и неявнополюсный типы.
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение. У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.

В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
Рис. 5. Отличие асинхронного от синхронного электродвигателя
Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).

Рис. 6. Синхронный электродвигатель с постоянными магнитами
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см. рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
Рис. 7. Пример реактивного ротора
В зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Общие требования
5.2.2. Генераторы, синхронные компенсаторы и их вспомогательное оборудование, устанавливаемые на открытом воздухе, должны иметь специальное исполнение.
5.2.3. Конструкция генераторов и синхронных компенсаторов должна обеспечивать их нормальную эксплуатацию и течение 20-25 лет с возможностью замены изнашивающихся и повреждаемых деталей и узлов при помощи основных грузоподъемных механизмов и средств малой механизации без полной разборки машины.
Конструкциями гидрогенератора и системы его водоснабжения должна быть предусмотрена возможность полного удаления воды и отсутствия застойных зон при ремонте в любое время года.
5.2.4. Генераторы и синхронные компенсаторы должны быть оборудованы контрольно-измерительными приборами в соответствии с гл. 1.6, устройствами управления, сигнализации, защиты в соответствии с 3.2.34-3.2.50 и с 3.2.72-3.2.90, устройствами АГП защиты ротора от перенапряжений, АРВ в соответствии с 3.3.52-3.3.60, а также устройствами автоматики для обеспечения автоматического пуска, работы и останова агрегата. Кроме того, турбогенераторы мощностью 100 МВт и более и синхронные компенсаторы с водородным охлаждением должны быть оборудованы устройствами дистанционного контроля вибрации подшипников. Турбо- и гидрогенераторы мощностью 300 МВт и более должны быть оборудованы также осциллографами с записью предаварийного процесса.
Кроме того, турбогенераторы мощностью 100 МВт и более и синхронные компенсаторы с водородным охлаждением должны быть оборудованы устройствами дистанционного контроля вибрации подшипников. Турбо- и гидрогенераторы мощностью 300 МВт и более должны быть оборудованы также осциллографами с записью предаварийного процесса.
5.2.5. Панели управления, релейной защиты, автоматики, возбуждения и непосредственного водяного охлаждения гидрогенератора должны, как правило, размещаться в непосредственной близости от него.
5.2.6. Электрические и механические параметры мощных турбо- и гидрогенераторов должны, как правило, приниматься оптимальными с точки зрения нагрузочной способности. При необходимости обеспечения устойчивости работы параметры генераторов могут приниматься отличными от оптимальных с точки зрения нагрузочной способности при обосновании технико-экономическими расчетами.
5.2.7. Напряжение генераторов должно приниматься на основе технико-экономических расчетов по согласованию с заводом-изготовителем и в соответствии с требованиями действующих ГОСТ.
5.2.8. Установка дополнительного оборудования для использования гидрогенераторов в качестве синхронных компенсаторов должна быть обоснована технико-экономическими расчетами.
5.2.9. Для монтажа, разборки и сборки генераторов, синхронных компенсаторов и их вспомогательного оборудования должны быть предусмотрены стационарные, передвижные или инвентарные подъемно-транспортные приспособления и механизмы.
5.2.10. При применении наружных грузоподъемных кранов гидроэлектростанций должны быть предусмотрены простые мероприятия для исключения воздействия дождя и снега на оборудование при продолжительном раскрытии помещений и монтажных площадок.
5.2.11. Электростанции должны иметь помещения для хранения резервных стержней обмотки статора. Помещения должны быть сухими, отапливаемыми, с температурой не ниже плюс 5°С, оборудованными специальными стеллажами.
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Возбуждение синхронных машин
Возбуждение синхронных машин может производиться за счет электромагнитного воздействия или же постоянного магнита. В случае с электромагнитным возбуждением применяется специальный генератор постоянного тока, который и питает обмотку, в связи со своей основной функцией данное устройство получило название возбудитель. Стоит отметить, что система возбуждения также делится на два вида по способу воздействия – прямой и косвенный. Прямой метод возбуждения подразумевает, что вал синхронной машины напрямую соединен механическим способом с ротором возбудителя. Косвенный же метод предполагает, что для того чтобы заставить ротор вращаться используется другой двигатель, например асинхронная электромашина.
В случае с электромагнитным возбуждением применяется специальный генератор постоянного тока, который и питает обмотку, в связи со своей основной функцией данное устройство получило название возбудитель. Стоит отметить, что система возбуждения также делится на два вида по способу воздействия – прямой и косвенный. Прямой метод возбуждения подразумевает, что вал синхронной машины напрямую соединен механическим способом с ротором возбудителя. Косвенный же метод предполагает, что для того чтобы заставить ротор вращаться используется другой двигатель, например асинхронная электромашина.
Наибольшее распространение сегодня получил именно прямой метод возбуждения. Однако в тех случаях, когда предполагается работа системы возбуждения с мощными синхронными электромашинами применяют генераторы независимого возбуждения, на обмотку которых ток подается с другого источника постоянного тока, называемого подвозбудителем. Несмотря на всю громоздкость, данная система позволяет добиться большей стабильности в работе, а также более тонкой настройки характеристик.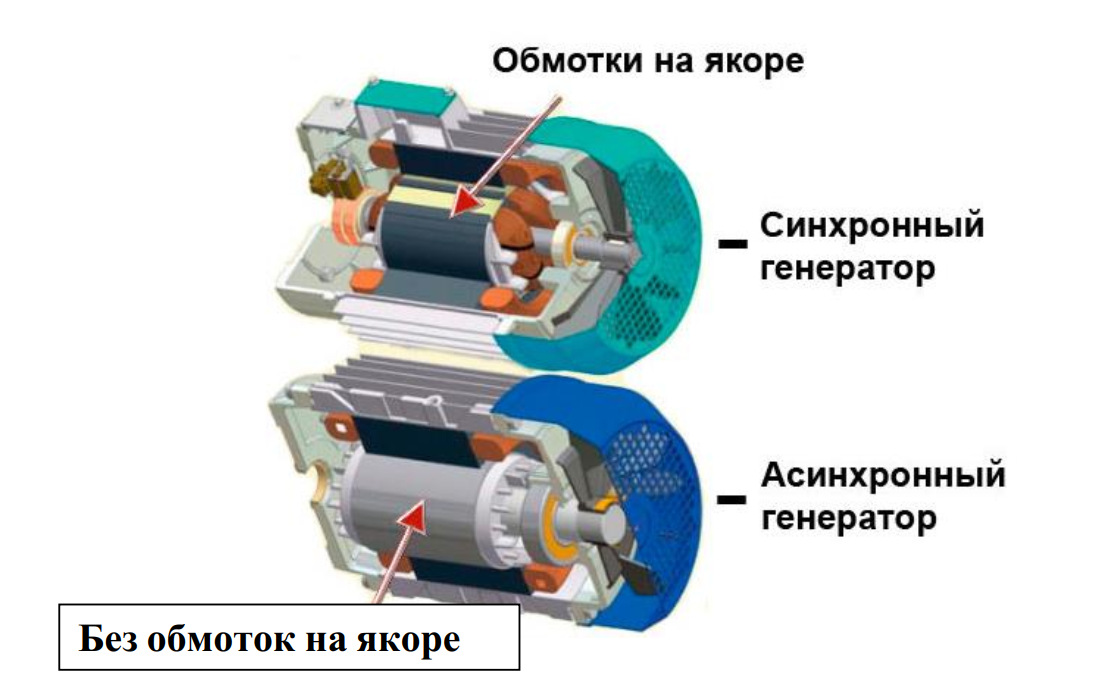
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Где применяются
Асинхронные двигатели активно используются во многих отраслях промышленности и сельского хозяйства. Они потребляют примерно 70% всей энергии, предназначенной для преобразования электричества во вращательное или поступательное движение. Асинхронные двигатели зарекомендовали себя наиболее эффективными в качестве электрической тяги, без которой не обходятся многие технологические операции.
Асинхронные двигатели обладают множеством положительных качеств. Простая конструкция позволяет изготавливать наиболее дешевые и надежные устройства. Минимальные расходы по эксплуатации обеспечиваются отсутствием скользящего узла токосъема, что одновременно повышает и надежность агрегата.
трехфазным или однофазным
Для нормального действия асинхронного агрегата необходимо выбирать наиболее рациональную схему управления. Трехфазный двигатель будет работать в однофазном режиме при условии правильного расчета конденсаторов, выбора типа и сечения проводов, аппаратуры защиты и управления.
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
- высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
- более высокая механическая прочность за счет особенностей конструкции электродвигателя;
- зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
- на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
- может применяться для уменьшения реактивной составляющей в сети.
Среди недостатков синхронных электродвигателей выделяют:
- сложную конструкцию;
- более сложный пуск;
- необходимость использования вспомогательных устройств и блоков;
- такие электродвигатели сложнее регулировать по числу оборотов;
- ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.
Ссылки по теме
- Правила технической эксплуатации электроустановок потребителей / Нормативный документ от 9 февраля 2007 г. в 02:14
- Библия электрика / Нормативный документ от 14 января 2014 г. в 12:32
- Справочник по электрическим сетям 0,4-35 кВ и 110-1150 кВ. Том 10 / Нормативный документ от 2 марта 2009 г. в 18:12
- Кабышев А.В., Тарасов Е.В. Низковольтные автоматические выключатели / Нормативный документ от 1 октября 2021 г. в 09:22
- Правила устройства воздушных линий электропередачи напряжением до 1 кВ с самонесущими изолированными проводами / Нормативный документ от 30 апреля 2008 г. в 15:00
- Князевский Б.А. Трунковский Л.Е. Монтаж и эксплуатация промышленных электроустановок / Нормативный документ от 17 октября 2019 г. в 12:36
- Маньков В.Д. Заграничный С.Ф. Защитное заземление и зануление электроустановок / Нормативный документ от 27 марта 2021 г. в 09:05
 в 15:00
в 15:00устройство, типы, характеристики, принцип работы
Содержание
- 1 Конструктивные элементы
- 2 Рабочий процесс
- 3 Механическая и угловая характеристика
- 4 Схемы замещения
- 5 Основные виды СД
- 6 Положительные и отрицательные качества
Электрические синхронные машины – отдельный вид приводного оборудования, обладающий своими особенностями. Отличия этого типа двигателей заметны во всем: в конструкции, функциональности, принципе работы. Как и любой механизм, они обладают своими достоинствами и недостатками.
Двигатели переменного тока находят свое применение практически повсеместно. Они обладают надежной и простой конструкцией, более функциональны и безопасны по сравнению с машинами, питающимися от сети постоянного тока. В зависимости от принципа работы, механизмы этого типа подразделяются на асинхронные и синхронные двигатели. О второй категории моторов, их устройстве, структуре, особенностях работы и пойдет речь в этой статье.
В зависимости от принципа работы, механизмы этого типа подразделяются на асинхронные и синхронные двигатели. О второй категории моторов, их устройстве, структуре, особенностях работы и пойдет речь в этой статье.
Конструктивные элементы
Устройство синхронного электропривода основано на использовании свойств трехфазного тока создавать вращающееся магнитное поле. Поэтому его конструктивное исполнение предусматривает включение следующих основных частей:
- индукторное колесо (или индуктор, статор) – стационарный узел мотора;
- ротор (или якорь) – подвижный механизм.
Каждый компонент состоит из ряда более мелких элементов, тесно взаимодействующих между собой. Индуктор имеет структуру аналогичную асинхронному приводу и содержит:
- корпус;
- шарикоподшипники, поддерживающие якорь;
- опоры, фиксирующие положение подшипников и являющиеся завершением корпуса;
- вентилятор, предназначенный для охлаждения электродвигателя;
- кожух, служащий для защиты от вращающегося вентилятора.

Дополнительно имеется коробка для электрических соединений, которая находится сбоку от корпуса статора. В корпусе расположен шихтованный металлический сердечник. Термин «шихтованный» подразумевает под собой набор из тонких (толщиной 0,3-0,5 мм) стальных пластин с изоляцией друг от друга. Наружные полосы имеют выштампованные пазы для фазных обмоток.
Размеры и конструкция индукторного колеса может быть разной: в виде цельного или собранного из отдельных сегментов цилиндра. Конструктивное исполнение корпуса зависит от мощности и габаритов электромотора. Для малых машин выполняется неразъемное изделие с запрессованным статором, для мощного электрооборудования предусматривается сборный вариант. Это упрощает перевозку, установку на рабочее место и эксплуатацию электрического двигателя.
Роторный механизм предназначен для возбуждения синхронного двигателя (СД), поэтому содержит сердечник либо с постоянными магнитами (у маломощных электроприводов), либо с электромагнитами. Аналогично индуктору ротор может быть сборным или цельным. У мотора, рассчитанного на большие скорости (3000, 1500 об/мин.), роторная обмотка равномерно распределена по поверхности цилиндрического якоря. Такой электропривод называется неявнополюсным. У тихоходного СД (до 1000 об/мин) на роторе выполнены полюса с катушками возбуждения, поэтому он носит название явнополюсного.
Аналогично индуктору ротор может быть сборным или цельным. У мотора, рассчитанного на большие скорости (3000, 1500 об/мин.), роторная обмотка равномерно распределена по поверхности цилиндрического якоря. Такой электропривод называется неявнополюсным. У тихоходного СД (до 1000 об/мин) на роторе выполнены полюса с катушками возбуждения, поэтому он носит название явнополюсного.
В синхронном двигателе неявнополюсного типа якорь представляет собой стальной цилиндр, по длине которого выполнены пазы для укладки роторной электроцепи. В зависимости от конструкции он может быть кованым сразу соединенным с валом, или представлять собой отдельное изделие, напрессованное на вал. Для защиты от центробежной силы система возбуждения синхронного привода прикрывается стальными немагнитными кольцами.
Электрический двигатель с явнополюсным ротором отличается иным расположением якорных электроцепей. В этом случае якорь имеет закрепленный на валу машины магнитопровод. На магнитопроводе находятся полюса с полюсными наконечниками, на которых расположена электрическая роторная обмотка. Система возбуждения синхронного электромотора также содержит соединяющие элементы в виде колец, установленных на валу, и прижатые к ним неподвижные электрические щетки.
Система возбуждения синхронного электромотора также содержит соединяющие элементы в виде колец, установленных на валу, и прижатые к ним неподвижные электрические щетки.
По мере вращения кольца скользят по щеткам, обеспечивая скользящий электроконтакт. Аналогичный щеточный узел имеет асинхронный эл/двигатель с фазным ротором. Различие состоит только в количестве контактных колец и щеток. Фазная обмотка якоря асинхронной машины требует три контактных кольца, тогда как синхронной всего два.
Рабочий процесс
Синхронный двигатель это электротехническое устройство, работающее на основе закона электромагнитной индукции. Принцип работы и устройство СД предусмотрены из условия практического применения этого физического явления. Магнитное поле создается трехфазной обмоткой, размещенной в пазах статорного пакета аналогично цепи асинхронной машины. На роторе размещена обмотка возбуждения, питаемая постоянным током. Питание к ней подводится через щетки и кольца. Постоянный ток, протекающий по возбуждающей обмотке, взаимодействует с вращающимся полем индуктора, что вызывает круговое движение вала. Вращающий момент зависит от токовой нагрузки и не зависит от скорости. Вот почему этот тип привода называется синхронный электродвигатель, то есть частота оборотов якоря равна скорости поля индуктора.
Вращающий момент зависит от токовой нагрузки и не зависит от скорости. Вот почему этот тип привода называется синхронный электродвигатель, то есть частота оборотов якоря равна скорости поля индуктора.
После запуска синхронный двигатель переменного тока вращается одновременно с магнитным потоком. СД не может запускаться с помощью только питающей сети. Это объясняется инерционностью роторного блока и высокой скоростью вращающегося поля. Схема включения маломощной машины предусматривает использование пусковых (демпферных) обмоток, с которыми она работает как синхронный двигатель с короткозамкнутым ротором (то есть реализуется асинхронный пуск). В случае мощных электроприводов пуск производится вспомогательным электромотором или преобразователем частоты.
Наибольшее распространение получил асинхронный пуск, предусматривающий устройство дополнительной КЗ-обмотки. В этом случае синхронный двигатель с короткозамкнутым ротором запускается аналогично асинхронному эл/двигателю. Вследствие таких действий роторный механизм разгоняется до скорости вращающегося магнитного потока. Если синхронный электродвигатель нагружается, расстояние между полюсами якоря и поля увеличивается. Как результат, якорный механизм отстает на нагрузочный угол, что соответствует отставанию от своего положения на холостом ходу.
Если синхронный электродвигатель нагружается, расстояние между полюсами якоря и поля увеличивается. Как результат, якорный механизм отстает на нагрузочный угол, что соответствует отставанию от своего положения на холостом ходу.
Устройство и принцип действия синхронного двигателя предусматривают эксплуатацию привода с постоянной скоростью, которая не зависит от нагрузки. СД не рассчитан на нагрузку, величина которой превышает пусковую мощность между роторным механизмом и магнитным потоком. В противном случае синхронизм прерывается, и работа синхронного двигателя останавливается.
Механическая и угловая характеристика
В силу особенностей, присущих синхронному двигателю, значение его момента не зависит от оборотов вращения. Это свойство привода определяет его назначение и сферу применения. Технические качества приводного оборудования для конфигурирования электропривода оцениваются зависимостью частоты вращения мотора от электромагнитного момента, развиваемого им. Эта зависимость известна как механическая характеристика синхронного двигателя. Она может быть статической или динамической. Первая показывает поведение СД в стабильном рабочем режиме. Вторая характеризует его работу в переходный период.
Эта зависимость известна как механическая характеристика синхронного двигателя. Она может быть статической или динамической. Первая показывает поведение СД в стабильном рабочем режиме. Вторая характеризует его работу в переходный период.
Качество механических характеристик оценивается жесткостью. Относительно этого параметра все характеристики делятся на идеально жесткие, жесткие и мягкие. В связи с тем, что частота вращения ротора синхронного двигателя под нагрузкой не меняется, этот тип электромоторов обладает идеально жесткой характеристикой, что выражается формулой:
n = 60*f1/p,
где f1 – частота тока статора;
p – число пар полюсов статорной обмотки.
Но зависимость n = f (M) не отражает полного поведения мотора, в котором при увеличении нагрузки происходит смещение осей поля индуктора и якоря. Каждой нагрузке соответствует определенный угол между их осями. Уравнение угловой характеристики:
Mэм = Mmax*sin θ
Это формула, выражает приблизительную зависимость момента на валу от угла вылета ротора. В реальных условиях максимальному моменту соответствует угол, несколько меньший, чем 90˚. При этом перегрузочная способность СД равна: λм = Мmax/MN = 2–3.
В реальных условиях максимальному моменту соответствует угол, несколько меньший, чем 90˚. При этом перегрузочная способность СД равна: λм = Мmax/MN = 2–3.
Схемы замещения
В СД при вращательном движении роторного узла с постоянным магнитным полем в цепи статорного устройства индуцируется электродвижущая сила (ЭДС). Она уравновешивает напряжение источника, подключенного к обмотке индукторного колеса. Поэтому ее называют противоЭДС. Схема замещения синхронного двигателя отражает создание противоЭДС в обмотке индуктора.
Электрический ток статора СД также формирует собственное магнитное поле, которое индуцирует ЭДС самоиндукции. Это учитывается в схеме замещения индуктивным элементом с индуктивным сопротивлением X1. Данная схема имеет вид:
Схема замещения позволяет составить уравнение электрического состояния СД и анализировать их характеристики и режимы работы.
Основные виды СД
Классификация синхронных двигателей может производиться относительно разных факторов. В зависимости от рабочего режима электроприводы представляют собой:
В зависимости от рабочего режима электроприводы представляют собой:
- электромеханические приводы – двигательные режимы;
- генераторные устройства – генераторный режим.
В разделе выше было рассмотрено, как работает синхронный двигатель в двигательном режиме, и из каких структурных элементов он состоит. Конструктивное исполнение генератора аналогично, разница заключается в основном в режиме работы. Схема включения с синхронным генератором для работы совместно с сетью представлена на рисунке:
Генератор синхронного типа является симметричным трехфазным источником электроэнергии. Он преобразует механическую энергию приводного механизма в электрическую энергию трехфазного тока. К индуктору генератора подключается потребитель электроэнергии, либо статор подключается к электросети для совместной параллельной работы с другими трехфазными агрегатами. Обмотка возбуждения генератора, подключенная к сетевому питанию (возбудителю) с напряжением 220в (или другими параметрами), создает постоянный магнитный поток, который замыкается в магнитной цепи СД следующим образом:
Принцип работы синхронного двигателя, его мощность, схема подключения ложатся в основу при построении разных электрических агрегатов. В связи с этим различают следующие виды синхронных машин:
В связи с этим различают следующие виды синхронных машин:
- гидрогенератор, вырабатывающий электроэнергию от гидравлических турбин;
- турбогенератор, работающий совместно с паровой или газовой турбиной;
- электрооборудование для повышения коэффициента мощности электротехнических установок или для стабилизации напряжения в сети;
- ударный генератор, служащий для кратковременного использования в режиме короткого замыкания;
- установка двойного питания, обеспечивающая несинхронные рабочие режимы;
- сельсин, представляющий собой маломощное устройство, выполняющее функции датчика угла поворота.
Это далеко не все технические установки, где используются разные типы синхронных устройств.
Положительные и отрицательные качества
Достоинства и недостатки синхронного двигателя, вытекающие из его конструктивных и технических особенностей, обуславливают возможность подключения синхронного электропривода, его практическое применение и спрос. Преимущества СД позволяют формировать разные типы приводов, где требуется надежная работа без регулирования оборотов и частых пусков/остановок. Среди положительных качеств этого типа машин отмечают:
Преимущества СД позволяют формировать разные типы приводов, где требуется надежная работа без регулирования оборотов и частых пусков/остановок. Среди положительных качеств этого типа машин отмечают:
- способность преобразовывать электрическую энергию в механическую и наоборот; это свойство особенно важно для производственных предприятий, где СД нужен для компенсации реактивной мощности, снижения нагрузки на трансформаторные устройства, повышения коэффициента мощности электросети, увеличения качества электроэнергии;
- высокий КПД порядка 97-98%;
- доступность изменения перегрузочных характеристик за счет токовых параметров роторного узла;
- низкую чувствительность к перепадам сетевого напряжения, что допускает подключение к питанию с относительно нестабильными показателями;
- повышенную надежность привода, что обуславливает применение синхронных машин в местах, где требуется большая мощность; синхронники широко применяются для приводов компрессорных агрегатов, насосных установок, оборудования с рабочими узлами, требующими мощности в сотни киловатт.

Недостатки синхронных двигателей накладывают определенные ограничения в их использовании. К ним относятся:
- сложность конструкции, поэтому только опытный специалист способен разобраться, как подключить, ремонтировать и обслуживать СД;
- невозможность прямого запуска, что вызывает ряд неудобств при эксплуатации;
- ограниченная сфера применения, допускающая только построение приводов с неизменной скоростью, небольшим количеством включений и выключений и сетевым питанием постоянного тока.
Большие плюсы и немалые минусы СД формируют объективное представление о машине этого типа. Поэтому при выборе необходимо заранее понимать, для чего он предназначен, зачем конструктивно предусмотрен тот или иной элемент. Лучше заранее изучить обозначение на шильдике или ознакомиться с паспортными данными электромашины, посмотреть, как подключить к существующей сети и после этого сделать осознанную покупку.
 Устройство, принцип работы, подключение, применение» src=»https://www.youtube.com/embed/LLwcpfUjl44?feature=oembed&wmode=opaque» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
Устройство, принцип работы, подключение, применение» src=»https://www.youtube.com/embed/LLwcpfUjl44?feature=oembed&wmode=opaque» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
Принцип работы синхронного двигателя
Статор и ротор являются двумя основными частями синхронного двигателя. Статор — это неподвижная часть двигателя, а ротор — их вращающаяся часть. Статор возбуждается трехфазным источником питания, а ротор возбуждается источником постоянного тока.
Термин «возбуждение» означает, что магнитное поле индуцируется в статоре и роторе двигателя. Основной целью возбуждения является преобразование статора и ротора в электромагнит.
Трехфазное питание индуцирует северный и южный полюса статора. Трехфазное питание синусоидальное. Полярность (положительная и отрицательная) их волны меняется после каждого полупериода, и по этой причине северный и южный полюса также меняются. Таким образом, можно сказать, что на статоре развивается вращающееся магнитное поле.
Таким образом, можно сказать, что на статоре развивается вращающееся магнитное поле.
Магнитное поле создается на роторе из-за источника постоянного тока. Полярность источника постоянного тока становится фиксированной , , и, таким образом, на роторе 9 возникает стационарное магнитное поле.0003 . Термин «неподвижный» означает, что их северный и южный полюсы остаются неподвижными.
Скорость, с которой вращается магнитное поле, известна как синхронная скорость . Синхронная скорость двигателя зависит от частоты питания и числа полюсов двигателя.
N S = 120f/P
Когда противоположные полюса статора и ротора обращены друг к другу, между ними возникает сила притяжения. Сила притяжения развивает крутящий момент в направлении против часовой стрелки. Крутящий момент — это вид силы, которая приводит объект во вращение. Таким образом, полюса ротора тянутся к полюсам статора.
После каждого полупериода полюса статора меняются местами. Положение ротора остается неизменным из-за инерции. Инерция — это тенденция объекта оставаться фиксированным в одном положении.
Положение ротора остается неизменным из-за инерции. Инерция — это тенденция объекта оставаться фиксированным в одном положении.
Когда одноименные полюса статора и ротора обращены друг к другу, между ними возникает сила отталкивания и развивается крутящий момент по часовой стрелке.
Давайте поймем это с помощью схемы. Для простоты предположим, что двигатель имеет два полюса. На рисунке ниже противоположные полюса статора и ротора обращены друг к другу. Так между ними возникает сила притяжения.
После полупериода полюса статора меняются местами. Одинаковые полюса статора и ротора обращены друг к другу, и между ними возникает сила отталкивания.
Неоднонаправленный крутящий момент вызывает пульсацию ротора только в одном месте, поэтому синхронный двигатель не запускается самостоятельно.
Для запуска двигателя ротор вращается внешними средствами. Таким образом, вместе со статором менялась и полярность ротора. Полюса статора и ротора блокируют друг друга, и в двигателе создается однонаправленный крутящий момент. Ротор начинает вращаться со скоростью вращающегося магнитного поля, или можно сказать с синхронной скоростью.
Ротор начинает вращаться со скоростью вращающегося магнитного поля, или можно сказать с синхронной скоростью.
Скорость двигателя фиксирована, и двигатель постоянно вращается с синхронной скоростью.
Синхронный двигатель — конструкция и работа
Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателей переменного тока. Конструкция синхронного двигателя аналогична генератору переменного тока. Такую же синхронную машину можно использовать как синхронный двигатель или как генератор переменного тока. Синхронные двигатели доступны в широком диапазоне, как правило, мощностью от 150 кВт до 15 МВт со скоростью от 150 до 1800 об/мин.
Конструкция синхронного двигателя
Конструкция синхронного двигателя (с явнополюсным ротором) показана на рисунке слева. Как и любой другой двигатель, он состоит из статора и ротора. Сердечник статора изготовлен из тонкого кремниевого ламината и изолирован поверхностным покрытием для минимизации потерь на вихревые токи и гистерезиса. Статор имеет внутри осевые пазы, в которых размещена трехфазная обмотка статора. Статор намотан трехфазной обмоткой на определенное число полюсов, равное полюсам ротора.
Статор имеет внутри осевые пазы, в которых размещена трехфазная обмотка статора. Статор намотан трехфазной обмоткой на определенное число полюсов, равное полюсам ротора.
Ротор в синхронных двигателях в основном имеет явные полюса. Питание постоянным током подается на обмотку ротора через токосъемные кольца. Постоянный ток возбуждает обмотку ротора и создает электромагнитные полюса. В некоторых случаях можно использовать и постоянные магниты. На рисунке выше очень кратко показана конструкция синхронного двигателя .
Работа синхронного двигателя
Статор имеет то же число полюсов, что и ротор, и питается от трехфазного переменного тока. Трехфазное питание переменного тока создает вращающееся магнитное поле в статоре. Обмотка ротора питается постоянным током, который намагничивает ротор. Рассмотрим двухполюсник синхронная машина , как показано на рисунке ниже.
- Теперь полюса статора вращаются с синхронной скоростью (скажем, по часовой стрелке). Если положение ротора таково, что полюс N ротора находится рядом с полюсом N статора (как показано на первой схеме вышеприведенного рисунка), то полюса статора и ротора будут отталкиваться друг от друга, и создается крутящий момент будет против часовой стрелки .
- Полюса статора вращаются с синхронной скоростью, и они вращаются очень быстро и меняют свое положение. Но при этом очень скоро ротор не сможет вращаться на тот же угол (из-за инерции), и следующим положением, скорее всего, будет вторая схема на рисунке выше. В этом случае полюса статора будут притягиваться к полюсам ротора, и создаваемый крутящий момент будет направлен по часовой стрелке.
- Следовательно, ротор будет подвергаться быстрому реверсивному крутящему моменту, и двигатель не запустится.
 Если положение ротора таково, что полюс N ротора находится рядом с полюсом N статора (как показано на первой схеме вышеприведенного рисунка), то полюса статора и ротора будут отталкиваться друг от друга, и создается крутящий момент будет против часовой стрелки .
Если положение ротора таково, что полюс N ротора находится рядом с полюсом N статора (как показано на первой схеме вышеприведенного рисунка), то полюса статора и ротора будут отталкиваться друг от друга, и создается крутящий момент будет против часовой стрелки .Но, если ротор вращать до синхронной скорости статора с помощью внешней силы (в направлении вращающегося поля статора), а поле ротора возбуждать вблизи синхронной скорости, то полюса статора будут продолжать притягиваться противоположные полюса ротора (поскольку ротор теперь также вращается вместе с ним, и положение полюсов будет одинаковым на протяжении всего цикла).