Содержание
Синхронный электродвигатель: характеристики, устройство и принцип действия
Содержание
- Устройство синхронного электродвигателя
- Принцип работы синхронного электродвигателя
- Характеристики синхронного электродвигателя
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.


Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков.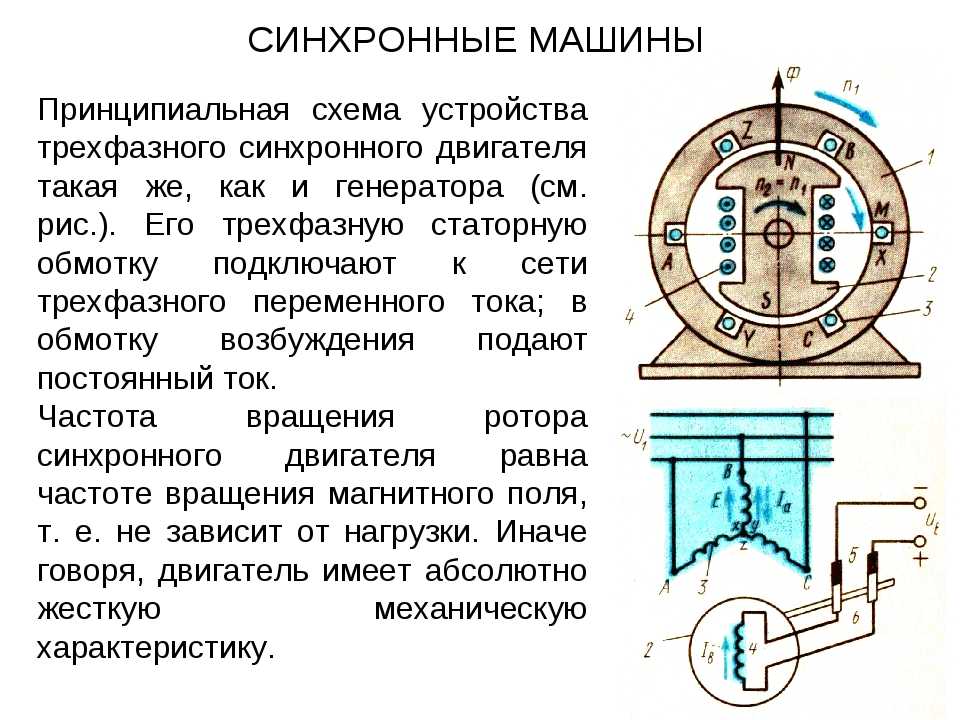 После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
 По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.

Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
Принцип действия синхронного двигателя
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Содержание
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.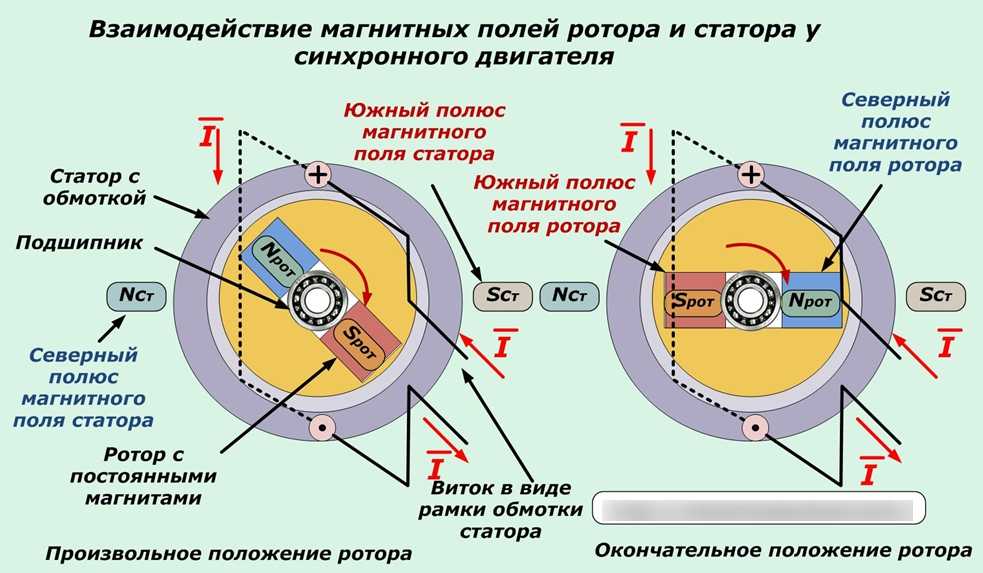
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь.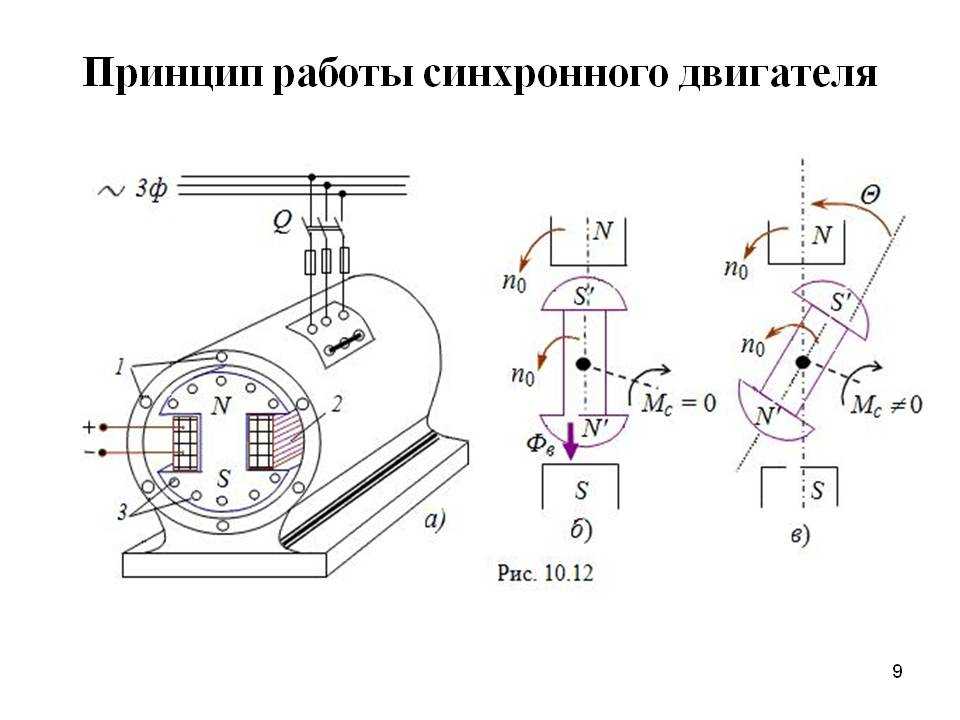 Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
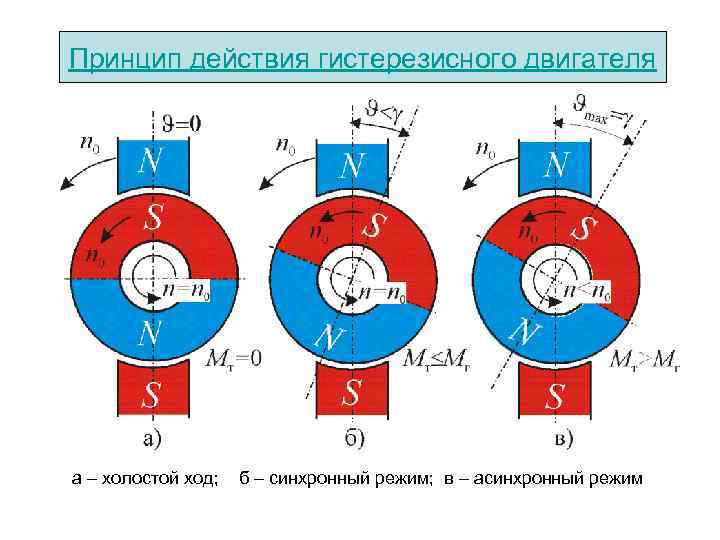
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент.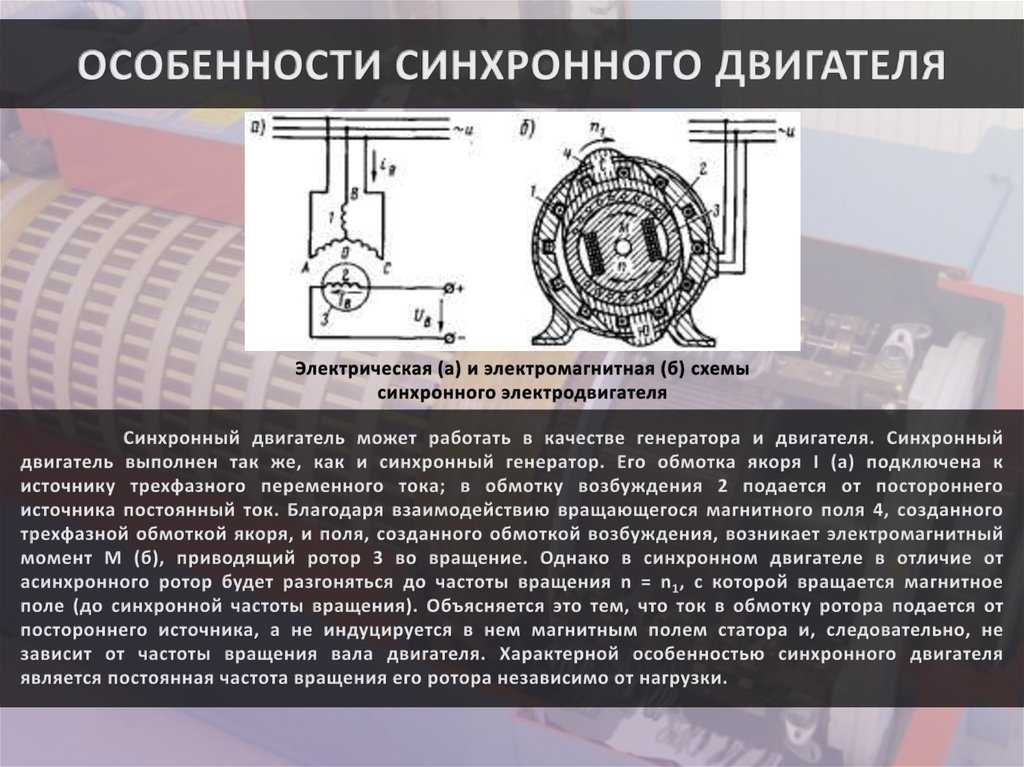 При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
 Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор.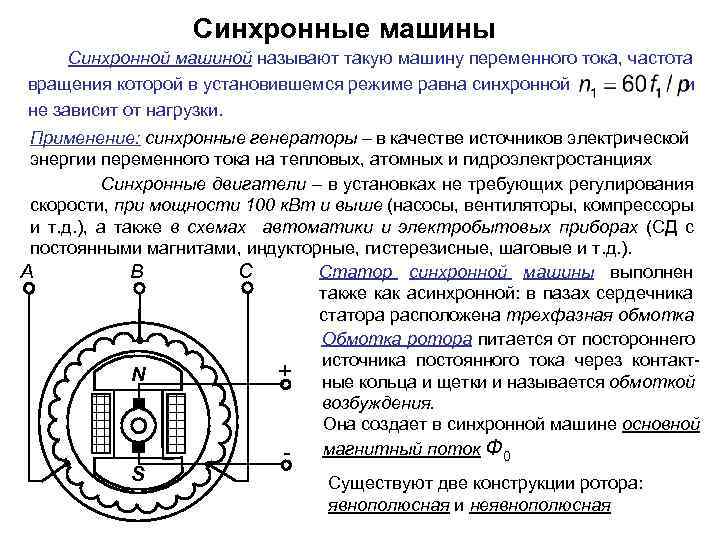 Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Система запуска асинхронного двигателя: устройство и принцип работы, схема,
Как проверить электродвигатель мультиметром: проверка ротора и статора на межвитковое замыкание, прозвонка асинхронного и трехфазного двигателя
Как проверить электродвигатель: этапы проверки и выяснение неисправностей
Реверсивная схема подключения электродвигателя
Подключение электродвигателя: схемы, проверка, видео
Как сделать схему для управления двигателем
Электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Посмотреть все СМИ
- Ключевые сотрудники:
- Никола Тесла
Томас Давенпорт
Ипполит Фонтейн
Майкл Фарадей
- Похожие темы:
- синхронный двигатель
линейный двигатель
коммутатор
арматура
реактивный двигатель
См.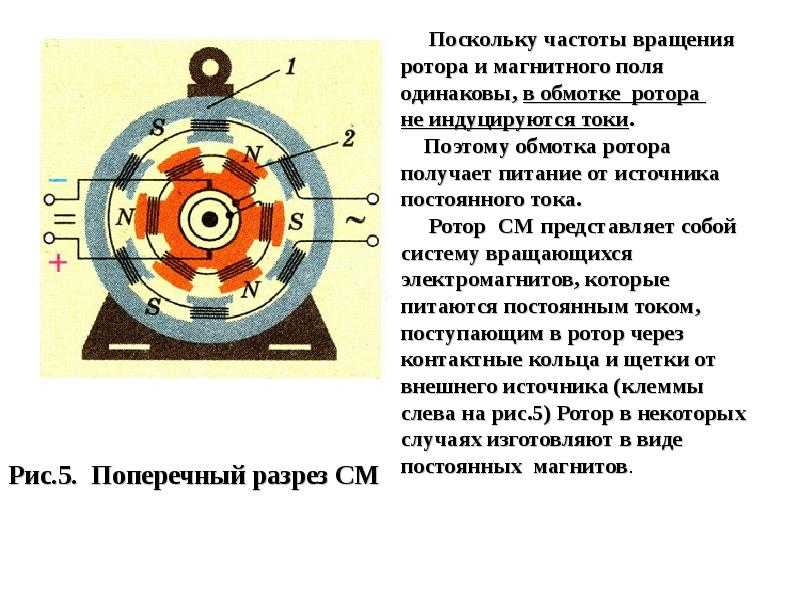 всю связанную информацию →
всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников, несущих ток, в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что в обмотках статора протекает набор из трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Викторина «Британника»
Энергия и ископаемое топливо
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников.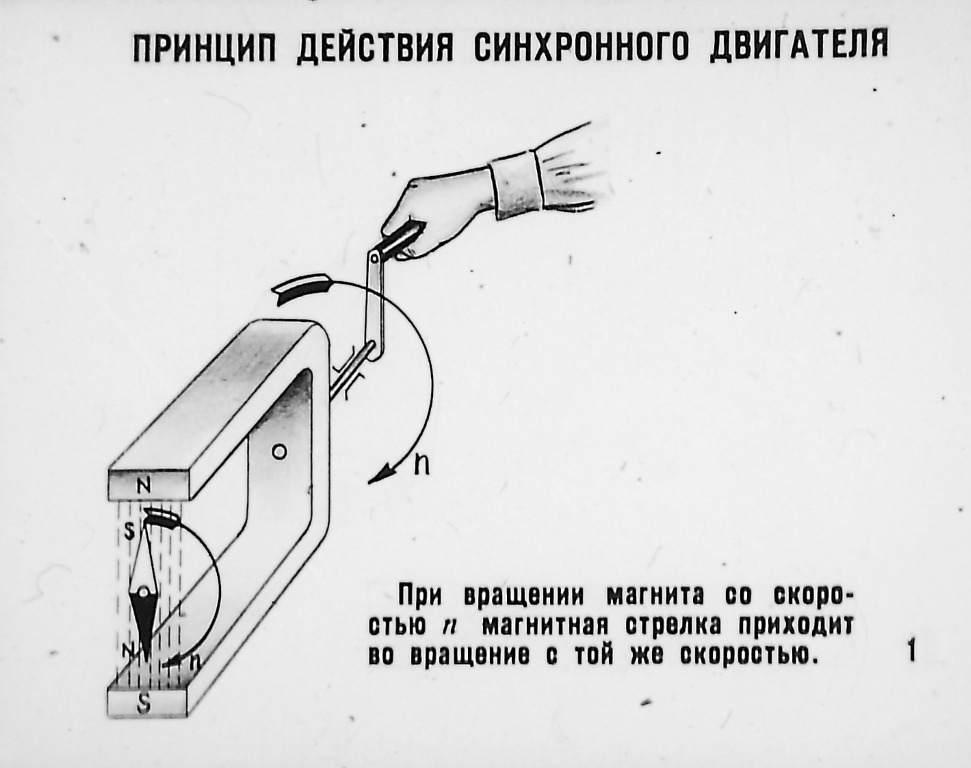 Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.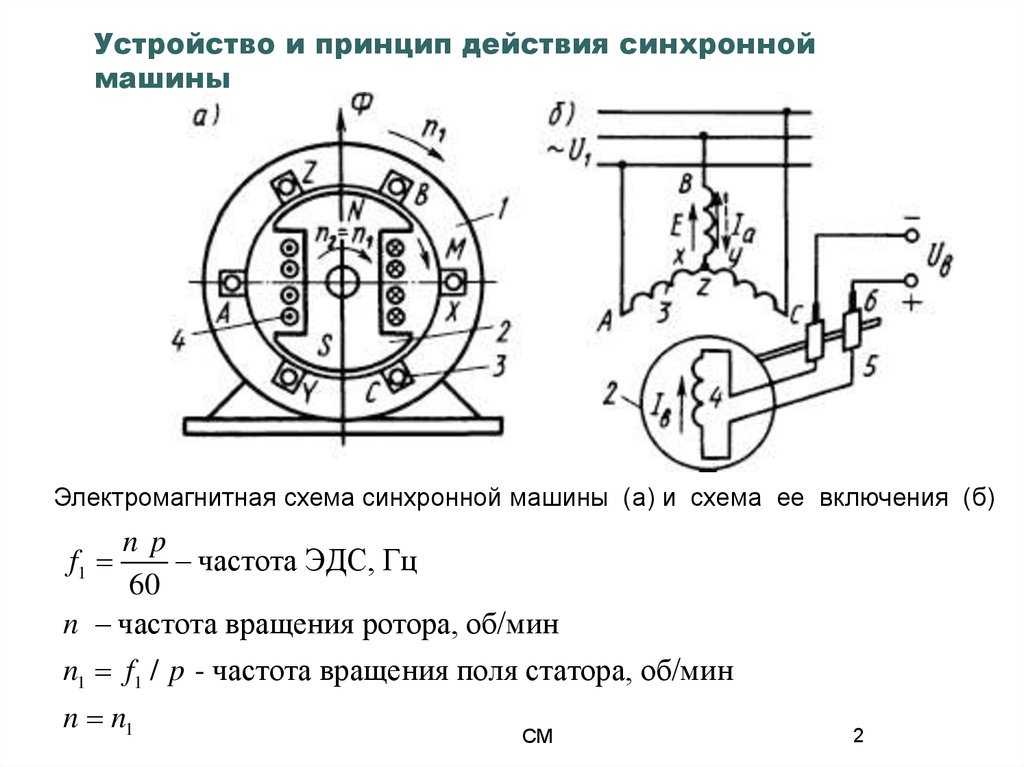
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания.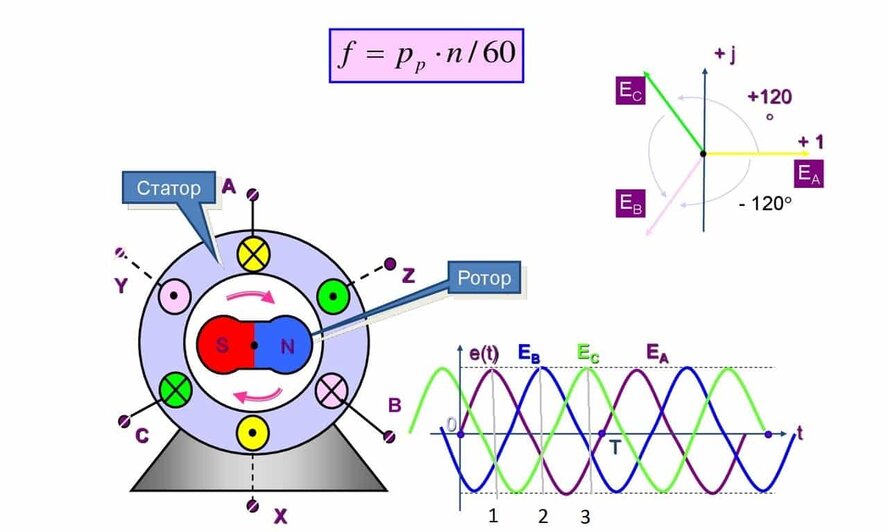 При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
Другие синхронные скорости можно получить с источником постоянной частоты, создав машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — число полюсов (которое должно быть четное число). Данную железную раму можно намотать для любого из нескольких возможных чисел пар полюсов, используя катушки, которые охватывают угол приблизительно (360/ р )°.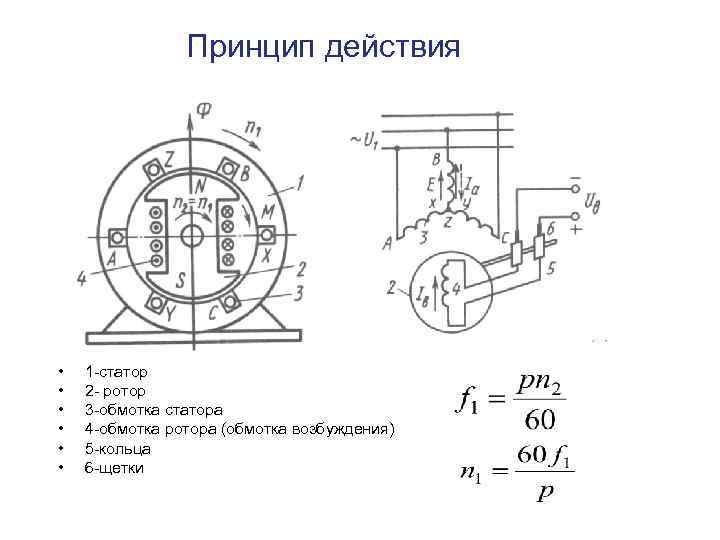 Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Принцип работы синхронного двигателя
Статор и ротор являются двумя основными частями синхронного двигателя. Статор — это неподвижная часть двигателя, а ротор — их вращающаяся часть. Статор возбуждается трехфазным источником питания, а ротор возбуждается источником постоянного тока.
Термин «возбуждение» означает, что магнитное поле индуцируется в статоре и роторе двигателя. Основной целью возбуждения является преобразование статора и ротора в электромагнит.
Трехфазное питание индуцирует северный и южный полюса статора.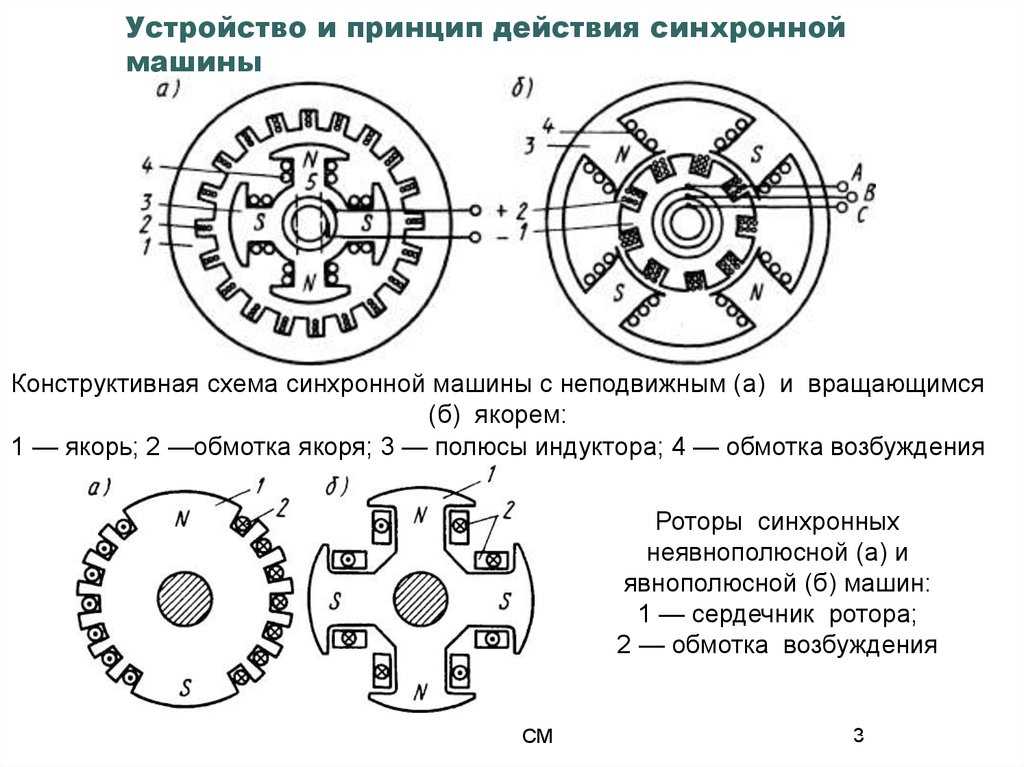 Трехфазное питание синусоидальное. Полярность (положительная и отрицательная) их волны меняется после каждого полупериода, и по этой причине северный и южный полюса также меняются. Таким образом, можно сказать, что на статоре развивается вращающееся магнитное поле.
Трехфазное питание синусоидальное. Полярность (положительная и отрицательная) их волны меняется после каждого полупериода, и по этой причине северный и южный полюса также меняются. Таким образом, можно сказать, что на статоре развивается вращающееся магнитное поле.
Магнитное поле создается на роторе из-за источника постоянного тока. Полярность источника постоянного тока становится фиксированной , , и, таким образом, на роторе создается стационарное магнитное поле. Термин «неподвижный» означает, что их северный и южный полюсы остаются неподвижными.
Скорость, с которой вращается вращающееся магнитное поле, известна как синхронная скорость . Синхронная скорость двигателя зависит от частоты питания и числа полюсов двигателя.
N S = 120f/P
Когда противоположные полюса статора и ротора обращены друг к другу, между ними возникает сила притяжения. Сила притяжения развивает крутящий момент в направлении против часовой стрелки. Крутящий момент — это вид силы, которая приводит объект во вращение. Таким образом, полюса ротора тянутся к полюсам статора.
Крутящий момент — это вид силы, которая приводит объект во вращение. Таким образом, полюса ротора тянутся к полюсам статора.
После каждого полупериода полюса статора меняются местами. Положение ротора остается неизменным из-за инерции. Инерция – это тенденция объекта оставаться фиксированным в одном положении.
Когда одноименные полюса статора и ротора обращены друг к другу, между ними возникает сила отталкивания и развивается крутящий момент по часовой стрелке.
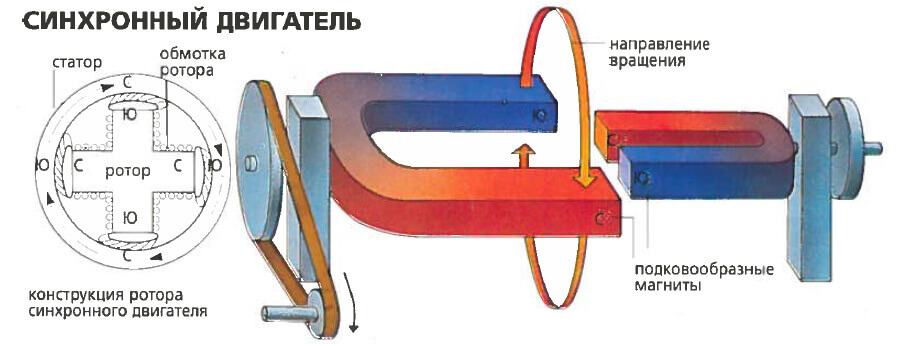
Позвольте понять это с помощью схемы. Для простоты предположим, что двигатель имеет два полюса. На рисунке ниже противоположные полюса статора и ротора обращены друг к другу. Так между ними возникает сила притяжения.
После полупериода полюса статора меняются местами. Одинаковые полюса статора и ротора обращены друг к другу, и между ними возникает сила отталкивания.
Неоднонаправленный крутящий момент вызывает пульсацию ротора только в одном месте, поэтому синхронный двигатель не запускается самостоятельно.