Содержание
Что такое пилон? — в строительстве и не только
Около 90% людей, услышав слово «пилон», установит моментальную ассоциативную связь со словом «стриптиз», имея в виду шест для эротических гимнастических упражнений. Но, во-первых, на нем выполняются не только эротические танцы, а во-вторых, прежде всего, это название, очевидно, подразумевает надежную опору, коим пилон и есть во всех отраслях, где он имеет место быть.
Но обо всем по порядку.
Пилон — что это такое?
Очевидно, древние египтяне, сооружая массивные пилоны при входе в храмы своих богов, и не подозревали, что возводят именно их, потому что это название пришло к нам из хронологически существовавшей в более позднее время Древней Греции и буквально переводится как «ворота».
Большинство египетских пилонов похожи друг на друга и отличаются только незначительными элементами и размерами, несмотря на то, что и возводились в разное время, и находятся в разных местах. Один в Карнаке, другие в Луксоре. И только пилон Рамзеса II на последнем снимке выпадает из общеегипетского архитектурного стиля.
И только пилон Рамзеса II на последнем снимке выпадает из общеегипетского архитектурного стиля.
А вот в Греции, пилон приобрел и другие функции, с которыми и остался в современном строительстве. Таким термином одарили не только массивные ворота при входе в монументальное сооружение, но и отдельно стоящие массивные столбы, чаще в форме усеченной пирамиды, и опоры арок и пролетов, как на суше, так и в водной стихии – опоры мостов также называются пилонами.
Так что, пилон в архитектуре, почти утратив свое первоначальное значение, обрел несколько других – не менее значимых.
И все же в древности у пилона были задачи скорее эстетические, нежели утилитарные, и не только в Египте и Греции, но и в Китае.
Итак, где еще в малоэтажном строительстве и архитектуре встречаются пилоны, кроме выше обозначенных мест:
- столбы железобетонных сборных или монолитных конструкций, каменные и кирпичные опоры перекрытий;
- опоры-основания арочных сводов метрополитена, концертных и выставочных залов, культовых сооружений;
- колонны при въездах на мосты;
- столбы-колонны при входах в парки и скверы т.
 п.
п.
 п.
п.Наибольшее разнообразие пилонов по функциям, внешнему виду, способу распределения нагрузок и функциональности присутствует в мостостроении.
Здесь пилоны часто служат не только опорой пролетов моста, но и основанием для навески натяжных тросов и прочее. И даже знаменитые башни тауэрского моста в Лондоне не что иное, как пилоны.
А арки при въезде на него – и подавно.
Гимнастический пилон
Именно таким было первоначальное использование металлического шеста, закрепленного между полом и потолком. Хотя изначально – к примеру, в Индии – он был деревянным и еще не назывался пилоном.
Современный пилон делается из толстостенной трубы из полированной нержавеющей стали, имеет верхнюю и нижнюю опоры и механизм раздвижения для фиксации трубы в опорах.
Опоры могут жестко крепиться к полу и потолку, а могут не крепиться вовсе. В этом случае устойчивость снаряда обеспечивается усилием распора. Многие гимнастические пилоны не только имеют возможность вращаться, благодаря подшипникам в опорах, но и обладают возможностью регулировки усилия вращения.
Описывать процесс самостоятельного изготовления гимнастического пилона будет не очень корректно по отношению к основным читателям нашего сайта – домашним умельцам, а порекомендовать коротенькое видео монтажа этого устройства мы себе позволим.
Сам пилон не занимает много места в квартире, но места вокруг него должно быть достаточно. Это чуть ли не единственный сдерживающий фактор, объясняющий отсутствие такого снаряда в домашних гимнастических уголках. Но если у вас все же найдется возможность его разместить – польза для детей будет несомненная. При тренировках на шесте нагружаются практически все группы мышц.
А танцы – это почти гимнастика. И, если при этом не оголяться, то и стриптиза не будет.
Пилон в авиастроении
В авиастроении значение термина пилон знакомо в основном специалистам. Да и служит он там не совсем опорой, ведь на него не опирают предметы, а навешивают.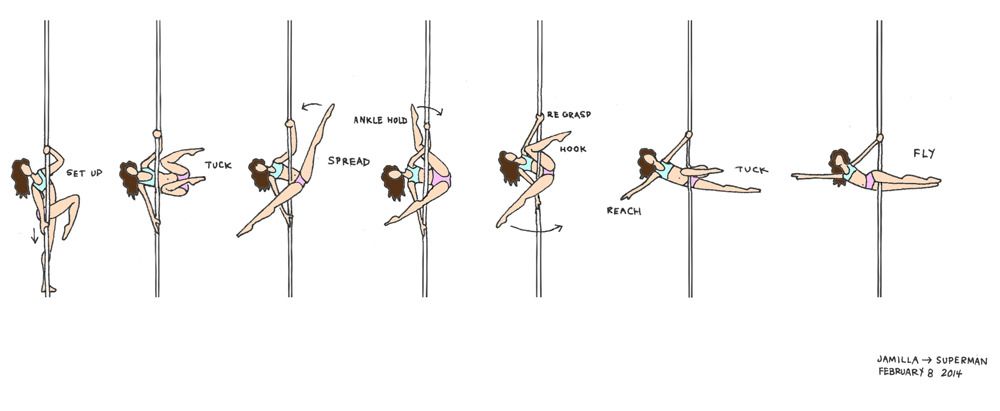 Пилон в авиастроении – это устройство для подвешивания узлов, агрегатов и грузов.
Пилон в авиастроении – это устройство для подвешивания узлов, агрегатов и грузов.
Грозное оружие крепится к самолету именно на пилонах.
И также на огромных мощных пилонах к крыльям самолета прикреплены турбореактивные двигатели.
Светодиодные пилоны и рекламные LED видеопанели
Эффективная трансляция рекламных материалов
Дистанционное управление контентом на экранах
LED пилоны от компании Умный Век — эффективное решение под ключ!
Сверхъяркий экран
Преимущества светодиодных пилонов
Оперативная смена информации — встроенное программное обеспечение позволяет обновлять информацию за считанные минуты через интернет с любого компьютера, планшета или мобильного устройства.
Динамичная реклама — возможность использования различных форматов фото и видео.
Актуальность — современные компании активно внедряют цифровые решения в свою работу, оптимизируя производительные процессы.
Удобное управление — через 3G, 4G, WAN, LAN. Управление как одним пилоном, так и сетью устройств
Все наши светодиодные пилоны имеют универсальную систему крепления: к полу, к потолку, к стене
ВАЖНАЯ ИНФОРМАЦИЯ
Медиа Пилон p2.5. Размер 960х1280 мм.
150 000
р.
| Подробнее |
Светодиодный Пилон p2.5. Размер 960х1920 мм.
170 000
р.
| Подробнее |
Светодиодный Пилон. Размер 960х2112 мм.
248 920
р.
| Подробнее |
Медиа Пилон p4. Размер 960х1920 мм.
190 000
р.
| Подробнее |
Светодиодный Пилон p4. Размер 960х2240 мм.
210 000
р.
| Подробнее |
Медиа Пилон p2.5. Размер 960х1280 мм.
MPS17061637
150 000
р.
| Заявка |
Характеристики:
Медиа Пилон p2.5
Размер 960х1280 мм
Яркость 700 кд
Шаг пикселя 2.5
Разрешение 384х512 пикс
Вес 20 кг
Макс/ср. мощность 0,6/0,3 кВт
Описание:
Это решение идеально подойдет для пространств с наличием преград для сквозного просмотра, за счет ножек в конструкции пилона вы получаете беспрепятственную трансляцию контента, а шаг пикселя в 2.5 позволяет считывать информацию даже с близкого растояния. Такой экран не останется не замеченным, благодаря своей яркости и четкости изображения. Пилоны можно использовать в качестве рекламных и информационных носителей. Необходимая вам информация может транслироваться 24 часа 7 дней в неделю.
Мы уверены, такой экран не останется без внимания. Наша компания готова предложить разработку контента любой сложности. Все зависит от ваших потребностей. Вам необходимо только оставить заявку, а наши менеджеры свяжутся с вами, предложат свои варианты и проведут подробный расчет.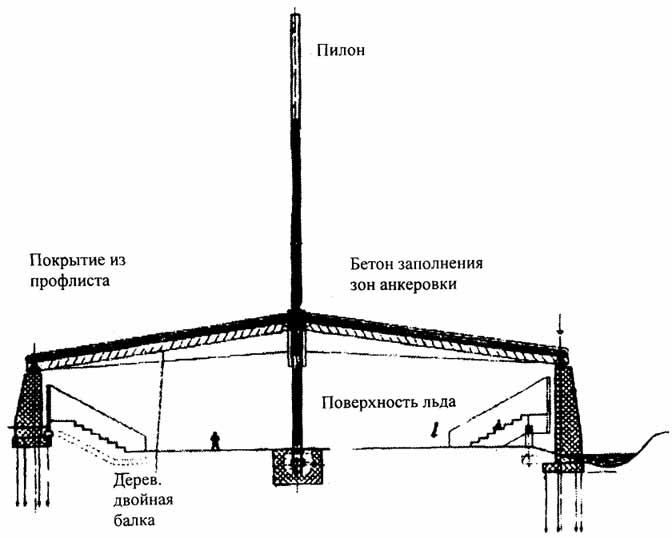
Светодиодный Пилон p2.5. Размер 960х1920 мм.
MPS17061717
170 000
р.
| Заявка |
Характеристики:
Светодиодный Пилон
Размер 960х1920 мм
Яркость 700 кд
Шаг пикселя .3
Разрешение 384х896 пикс
Вес 38 кг
Макс/ср. мощность 0,8/0,4 кВт
Описание:
Это решение идеально подойдет для крупных торговых и бизнес-центров. Такой экран не останется не замеченным, благодаря своей яркости и четкости изображения. Пилоны можно использовать в качестве рекламных и информационных носителей. Необходимая вам информация может транслироваться 24 часа 7 дней в неделю.
Мы уверены, такой экран не останется без внимания. Наша компания готова предложить разработку контента любой сложности. Все зависит от ваших потребностей. Вам необходимо только оставить заявку, а наши менеджеры свяжутся с вами, предложат свои варианты и проведут подробный расчет.
Светодиодный Пилон. Размер 960х2112 мм.
MPS17061746
248 920
р.
| Заявка |
Характеристики:
Светодиодный Пилон
Размер 960х2240 мм
Яркость 1000 кд
Шаг пикселя 3
Разрешение 320×704 пикс
Вес 40 кг
Макс/ср. мощность 0,9/0,45 кВт
Описание:
Это решение идеально подойдет для крупных площадок под мероприятия и экспозиции. Такой экран не останется не замеченным, благодаря своей яркости и четкости изображения. Пилоны можно использовать в качестве рекламных и информационных носителей. Необходимая вам информация может транслироваться 24 часа 7 дней в неделю.
Мы уверены, такой экран не останется без внимания. Наша компания готова предложить разработку контента любой сложности. Все зависит от ваших потребностей. Вам необходимо только оставить заявку, а наши менеджеры свяжутся с вами, предложат свои варианты и проведут подробный расчет.
Медиа Пилон p4. Размер 960х1920 мм.
MPS17061625
190 000
р.
| Заявка |
Характеристики:
Медиа Пилон p2.5
Размер 960х1920 мм
Яркость 5500 кд
Шаг пикселя 4
Разрешение 384х768 пикс
Вес 36 кг
Макс/ср. мощность 0,8/0,4 кВт
Описание:
Данная модификация пилона идеальна для установки в залах и пространствах, в которых предусмотрено наличие посетителей. За счет выского разрешения LED модулей, информация с данной конструкции будет хорошо считываться не только на расстоянии, но и с близкой дистанции. Такой экран не останется не замеченным, благодаря своей яркости и четкости изображения. Пилоны можно использовать в качестве рекламных и информационных носителей. Необходимая вам информация может транслироваться 24 часа 7 дней в неделю.
Мы уверены, такой экран не останется без внимания. Наша компания готова предложить разработку контента любой сложности. Все зависит от ваших потребностей. Вам необходимо только оставить заявку, а наши менеджеры свяжутся с вами, предложат свои варианты и проведут подробный расчет.
Все зависит от ваших потребностей. Вам необходимо только оставить заявку, а наши менеджеры свяжутся с вами, предложат свои варианты и проведут подробный расчет.
Светодиодный Пилон p4. Размер 960х2240 мм.
MPS17061642
210 000
р.
| Заявка |
Характеристики:
Светодиодный Пилон p2.5
Размер 960х2240 мм
Яркость 5500 кд
Шаг пикселя 4
Разрешение 384х896 пикс
Вес 38 кг
Макс/ср. мощность 1/0,5 кВт
Описание:
Медиа пилон расчитан на установку в местах с необходимостью работы 24 часа на 7 дней. Высокое разрешение и внушительный размер конструкции предоставляют считывание информации с больших дистанций, но также предоставляют четкость изображения при близком расстоянии. Такой экран не останется не замеченным, благодаря своей яркости и четкости изображения. Пилоны можно использовать в качестве рекламных и информационных носителей.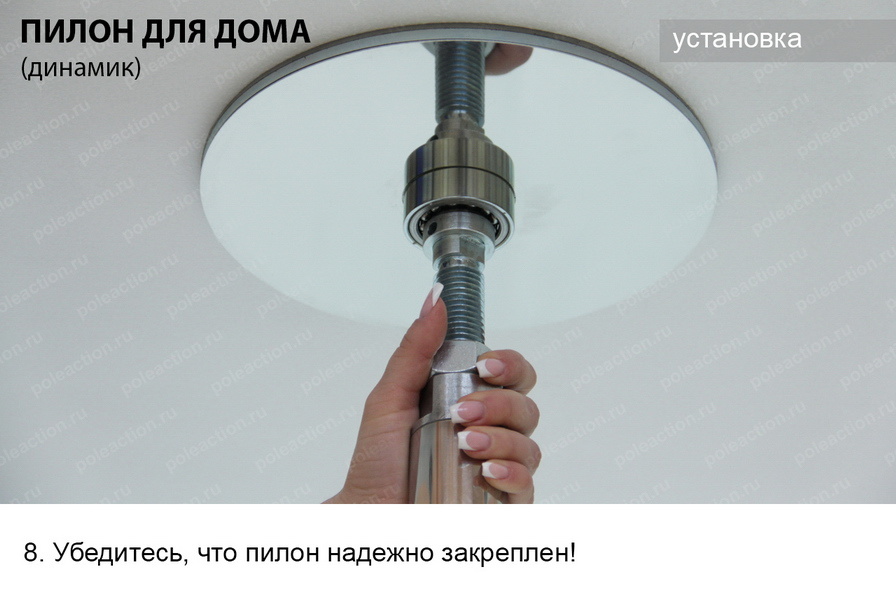 Необходимая вам информация может транслироваться 24 часа 7 дней в неделю.
Необходимая вам информация может транслироваться 24 часа 7 дней в неделю.
Мы уверены, такой экран не останется без внимания. Наша компания готова предложить разработку контента любой сложности. Все зависит от ваших потребностей. Вам необходимо только оставить заявку, а наши менеджеры свяжутся с вами, предложат свои варианты и проведут подробный расчет.
Часто задаваемые вопросы
ЗАИНТЕРЕСОВАНЫ В ПОСТАВКЕ?
• — поля, обязательные для заполнения
телефон
+7 (499) 754 84 82
Камеры Pylon — набор labscript
Обзор
Это устройство позволяет управлять камерами Basler для научных исследований с помощью Pylon API с оболочкой PyPylon python.
Чтобы использовать это устройство, должны быть установлены API Basler Pylon и оболочка PyPylon.
| |
| |
|
 PylonCamera.blacs_tabs
PylonCamera.blacs_tabs Установка
Сначала убедитесь, что Basler Pylon SDK установлен.
Он доступен бесплатно здесь (после регистрации бесплатной учетной записи Basler).
Рекомендуется использовать программу Pylon Viewer, входящую в состав SDK, для проверки связи с камерой.
Оболочка Python устанавливается через pip:
pip install -U pypylon
В настоящее время оболочка протестирована и подтверждена ее совместимость с Pylon 5 для камер с интерфейсом USB3 и GigE.
Для камер GigE убедитесь, что карта сетевого интерфейса (NIC) на компьютере с BLACS, управляющим камерой, поддерживает Jumbo Frames.
Это максимально допустимое значение (обычно 9000) предпочтительнее, чтобы избежать потери кадров.
Для камер USB3 следует соблюдать осторожность при использовании хоста USB3, совместимого с камерами Basler.
Basler ведет список совместимых хост-контроллеров.
Камеры будут работать с любым портом USB3, но несовместимые хосты не обеспечат более высокую производительность.
Использование
Как и в случае с устройством IMAQdxCamera, основная часть настройки камеры выполняется с использованием словаря kwargs, где имена и значения ключей отражают те, что предоставляются интерфейсом Pylon SDK.
Какие параметры могут/должны быть установлены, зависит от коммуникационного интерфейса.
Узнать, какие параметры доступны, можно тремя способами:
Внимательно прочитать документацию Pylon SDK.
Зеркалирование имен и значений параметров Pylon Viewer.
Подключение к камере с минимальной конфигурацией, просмотр словаря текущих параметров и копирование соответствующих значений в таблицу подключения (предпочтительно).
Ниже приведены общие конфигурации для камер на основе GigE и USB3.
из импорта labscript * из labscript_devices.
 PylonCamera.labscript_devices импортировать PylonCamera
PylonCamera('gigeCamera',parent_device=parent,connection=conn,
serial_number=1234567, # установить серийный номер камеры
Minimum_recovery_time=20e-3, # минимальное время выдержки зависит от модели и конфигурации камеры
camera_attributs={
'ExposureTimeAbs': 1000, # в нас
«Режим экспозиции»: «Время»,
«ЭкспозицияАвто»: «Выкл.»,
«GainAuto»: «Выкл.»,
'PixelFormat': 'Mono12Packed',
«Гамма»: 1,0,
«Черный уровень»: 0,
«Источник триггера»: «Строка 1»,
«Режим триггера»: «Вкл.»
},
manual_camera_attributes={
«Источник триггера»: «Программное обеспечение»,
«Режим триггера»: «Выкл.»
})
PylonCamera('usb3Camera',parent_device=parent,connection=conn,
серийный номер = 12345678,
минимальное_время_восстановления=36e-3,
camera_attributs={
«Время воздействия»: 1000, #в нас
«Режим экспозиции»: «Время»,
«ЭкспозицияАвто»: «Выкл.
PylonCamera.labscript_devices импортировать PylonCamera
PylonCamera('gigeCamera',parent_device=parent,connection=conn,
serial_number=1234567, # установить серийный номер камеры
Minimum_recovery_time=20e-3, # минимальное время выдержки зависит от модели и конфигурации камеры
camera_attributs={
'ExposureTimeAbs': 1000, # в нас
«Режим экспозиции»: «Время»,
«ЭкспозицияАвто»: «Выкл.»,
«GainAuto»: «Выкл.»,
'PixelFormat': 'Mono12Packed',
«Гамма»: 1,0,
«Черный уровень»: 0,
«Источник триггера»: «Строка 1»,
«Режим триггера»: «Вкл.»
},
manual_camera_attributes={
«Источник триггера»: «Программное обеспечение»,
«Режим триггера»: «Выкл.»
})
PylonCamera('usb3Camera',parent_device=parent,connection=conn,
серийный номер = 12345678,
минимальное_время_восстановления=36e-3,
camera_attributs={
«Время воздействия»: 1000, #в нас
«Режим экспозиции»: «Время»,
«ЭкспозицияАвто»: «Выкл. »,
«GainAuto»: «Выкл.»,
'PixelFormat': 'Mono12Packed',
«Гамма»: 1,0,
«Уровень черного»: 0,
«Источник триггера»: «Строка 1»,
«Режим триггера»: «Вкл.»,
«Режим затвора»: «Глобальный»
},
manual_camera_attributes={
«Источник триггера»: «Программное обеспечение»,
«Режим триггера»: «Выкл.»
})
начинать()
gigeCamera.expose(t=0.5,'exposure1')
usb3Camera.expose(t=0,45,'exposure2')
остановка(1)
»,
«GainAuto»: «Выкл.»,
'PixelFormat': 'Mono12Packed',
«Гамма»: 1,0,
«Уровень черного»: 0,
«Источник триггера»: «Строка 1»,
«Режим триггера»: «Вкл.»,
«Режим затвора»: «Глобальный»
},
manual_camera_attributes={
«Источник триггера»: «Программное обеспечение»,
«Режим триггера»: «Выкл.»
})
начинать()
gigeCamera.expose(t=0.5,'exposure1')
usb3Camera.expose(t=0,45,'exposure2')
остановка(1)
Утилиты
Устройство Pylon labscript содержит скрипт в подпапке testing , который может автоматически определять время считывания полнокадрового сенсора и максимально возможную частоту кадров.
Этот инструмент помогает правильно определить соответствующее минимальное время_восстановления_ для каждого устройства.
Минимальное время восстановления зависит от используемой модели, используемой коммуникационной шины и мелких деталей настройки (таких как микропрограммы хост-контроллера, длина кабелей, рабочая нагрузка хост-компьютера и т.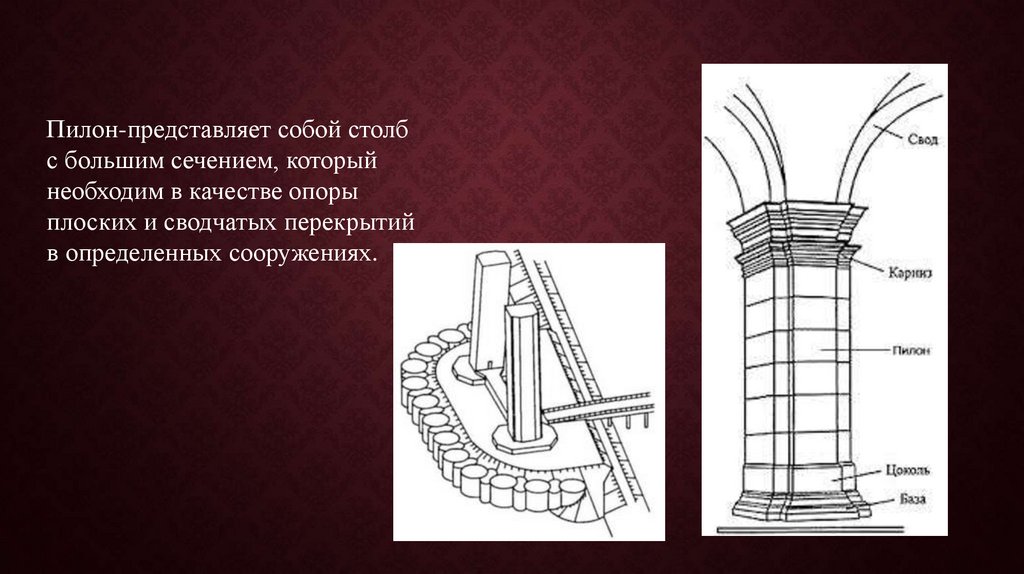 д.).
д.).
В результате часто требуется живое тестирование устройства, чтобы точно определить фактическое время восстановления, необходимое между выстрелами.
Сценарий запускается из папки тестирования с использованием
python ExposureTiming.py [camera_sn]
, где [camera_sn] — серийный номер камеры, к которой нужно подключиться и протестировать.
Сценарий сообщает о минимальном времени восстановления между двумя снимками с экспозицией 1 мс каждый без использования режима перекрывающейся экспозиции.
Изменение сценария с включением типичных параметров эксперимента поможет более точно определить минимальное время восстановления.
Как правило, минимальное время восстановления должно быть немного больше, чем сообщаемое время считывания датчика.
Обратите внимание, что в режиме экспонирования с перекрытием вторая экспозиция начинается до завершения считывания первой экспозиции, и должна заканчиваться после завершения считывания первого кадра экспозиции.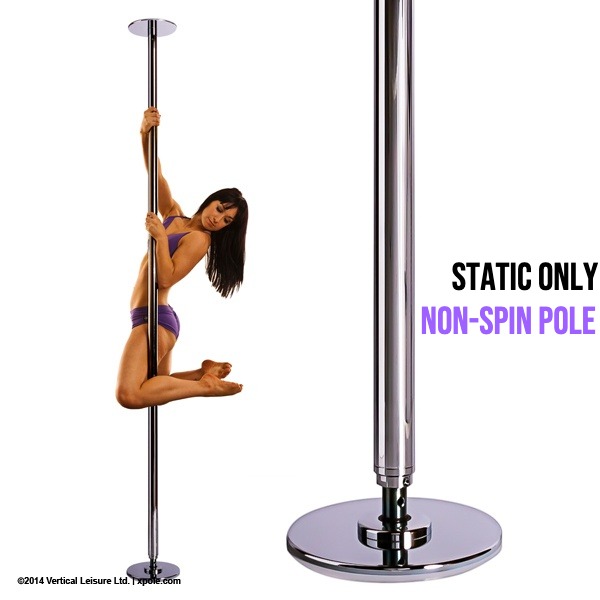
Это позволяет получить серию из двух экспозиций с более короткой задержкой между ними за счет ограничений на продолжительность второй экспозиции.
Скрипт также сообщит о минимальном времени между окончанием одной экспозиции и началом второй (номинально readout_time - Exposure_time ).
Обратите внимание, что эта функция автоматически обрабатывается на уровне API Pylon; это устройство labscript не знает об этом активно.
В результате неправильное использование режима перекрытия будет распознано не во время компиляции, а во время съемки как аппаратные ошибки.
Подробная документация
- класс labscript_devices.PylonCamera.labscript_devices.PylonCamera( имя , parent_device , соединение , серийный_номер , ориентация=Нет , pixel_size=[1.0, 1.0] , увеличение=1.0 , trigger_edge_type=’rising’ , trigger_duration=Нет , Minimum_recover y_time=0.0 , camera_attributes=Нет , manual_mode_camera_attributes =Нет , stop_acquisition_timeout=5. 0 , exception_on_failed_shot=Истина , save_attribute_visibility_level=’промежуточный’ , mock=False , **кваргс )[источник]
Базы:
labscript_devices.IMAQdxCamera.labscript_devices.IMAQdxCameraКамера, управляемая с помощью NI IMAQdx и запускаемая по цифровому фронту.
- Параметры
имя ( стр ) – имя устройства
parent_device ( IntermediateDevice ) — устройство с цифровыми выходами, которое будет использоваться для запуска сбора данных
соединение ( str ) – Имя порта цифрового вывода на родительском устройстве.
серийный_номер ( str или int ) – строка или целое число (целое позволяет ввести шестнадцатеричный литерал)
серийный номер камеры. Это будет использоваться для идентификации камеры.ориентация ( стр , дополнительно ) –
<имя>
Описание положения или ориентации камеры. Это будет использоваться
чтобы определить место в файле снимков, где изображения будут
сохранен. Если не указано, вместо него будет использоваться имя устройства.размер_пикселя ( [ с плавающей запятой , с плавающей запятой ] , необязательно 9009 7 ) –
[1.0, 1.0]
Размер x и y пикселей в микрометрах. Это можно использовать
в настройке масштаба в отображении изображения черного цвета, а также
извлекают в лизе для анализа.увеличение ( поплавок , дополнительно ) –
1,0
Увеличение системы визуализации.trigger_edge_type ( str ) –
«восходящий»
Направление желаемых ребер, которые должны быть созданы на родительском элементе.
цифровой выход устройства, используемый для запуска. Должен быть «поднимающимся» или
‘падение’. Обратите внимание, что это определяет только ребра, созданные на
родительское устройство, оно не программирует камеру на ожидание этого типа
край. При необходимости камеру необходимо настроить отдельно через
camera_attributes, чтобы убедиться, что тип края
сгенерировано. По умолчанию:«растущий»trigger_duration ( float или Нет ) –
Нет
Длительность цифровых импульсов, генерируемых родительским устройством. Этот
также может быть указан в качестве аргумента дляexpose()— заданное значение
здесь будет использоваться только в том случае, если вexpose()ничего не передано.минимальное_время_восстановления ( с плавающей запятой ) –
0
Минимальное время между кадрами. Это будет использоваться для проверки ошибок во время
компиляция.camera_attributes ( dict , необязательный ) — словарь имен и значений атрибутов камеры, которые должны быть запрограммированы в
камера. Значение этих атрибутов зависит от модели.
Атрибуты будут запрограммированы в том порядке, в котором они появляются в этом
словарь. Это может быть важно, поскольку некоторые атрибуты могут быть недоступны для установки.
если другой атрибут не был установлен первым. После добавления этого устройства в
ваша таблица подключений, словарь атрибутов камеры по умолчанию
можно получить на вкладке BLACS, подходящей для копирования и вставки
в таблицу подключений, чтобы настроить те, которые вас интересуют.manual_mode_camera_attributes ( dict , опционально ) — Словарь атрибутов, которые будут запрограммированы в камеру во время
ручной режим, которые отличаются от своих значений вcamera_attributes. Этот
может быть полезно, например, чтобы иметь программный запуск во время ручного
режим (позволяющий получать кадры из ручного режима BLACS
интерфейс), но аппаратный запуск во время выполнения с буферизацией. Любые атрибуты
в этом словаре также должны присутствовать вкамера_атрибуты.stop_acquisition_timeout ( float ) –
5.0
Сколько времени в секундах ждать во времяtransition_to_bufferedдля
приобретение изображений, чтобы завершить, прежде чем сдаваться. Пока все триггеры
должны были быть получены, это можно использовать для обеспечения медленного изображения
время загрузки.exception_on_failed_shot ( bool ) –
True.
Если получение не завершается в течение заданного тайм-аута после окончания
кадра, возбуждать ли исключение. Если False, вместо этого печатает
предупреждение для stderr (отображается на панели вывода терминала в BLACS
вкладку), сохраняет полученные изображения и продолжает. В случае
такой «неудачный выстрел», атрибут HDF5
f[‘images’][ориентация/имя].attrs[‘failed_shot’] будет установлено наПравда
(в противном случае устанавливается значениеFalse). Этот атрибут доступен в
lyse dataframe какdf[ориентация/имя, 'failed_shot'].save_attribute_visibility_level ( str или None ) – «промежуточный»
Уровень детализации атрибутов камеры, сохраненный в файле HDF5 в
конец каждого кадра. Если None, никакие атрибуты не будут сохранены. Должен быть одним из
«простой»,«средний»,«расширенный»илиНет. ЕслиНет, нет
атрибуты будут сохранены.mock ( bool , необязательно ) – False
Для тестирования целей смоделируйте камеру с поддельными данными вместо
взаимодействие с реальным оборудованием.**kwargs — Дополнительные аргументы ключевого слова должны быть переданы в метод
__init__
родительский класс (TriggerableDevice).
- описание = ‘Камера на опоре’
Краткое описание устройства.
 0 , exception_on_failed_shot=Истина , save_attribute_visibility_level=’промежуточный’ , mock=False , **кваргс )[источник]
0 , exception_on_failed_shot=Истина , save_attribute_visibility_level=’промежуточный’ , mock=False , **кваргс )[источник]


 Любые атрибуты
Любые атрибуты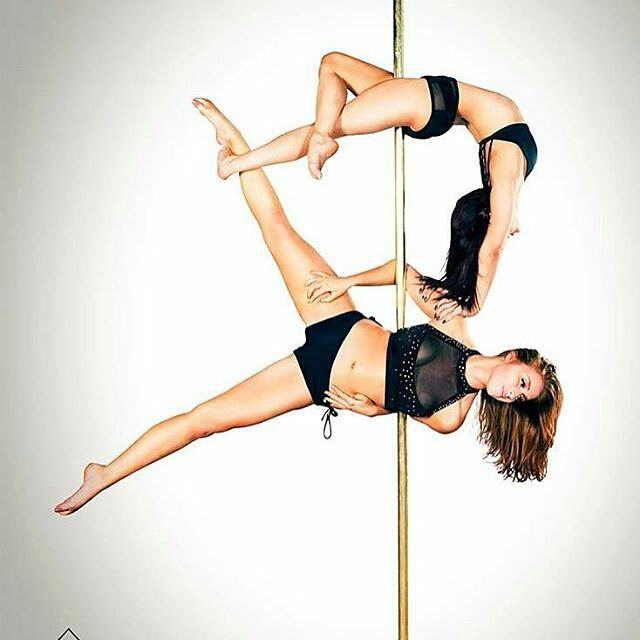 Этот атрибут доступен в
Этот атрибут доступен в
- класс labscript_devices.PylonCamera.blacs_tabs.PylonCameraTab( блокнот , настройки , перезагрузка = False )[источник]
Базы:
labscript_devices.IMAQdxCamera.blacs_tabs.IMAQdxCameraTab- worker_class = ‘labscript_devices.PylonCamera.blacs_workers.PylonCameraWorker’
- класс labscript_devices.PylonCamera.blacs_workers.PylonCameraWorker( *args , **kwargs )[источник]
Базы:
labscript_devices.IMAQdxCamera.blacs_workers.IMAQdxCameraWorkerРаботник камеры API Pylon.
Наследуется от IMAQdxCameraWorker. Перегружает get_attributes_as_dict
использовать метод PylonCamera.get_attributes().- get_attributes_as_dict( уровень видимости )[источник]
Вернуть список атрибутов камеры для заданной видимости
уровень
- интерфейс_класс
псевдоним
labscript_devices. PylonCamera.blacs_workers.Pylon_Camera
 PylonCamera.blacs_workers.Pylon_Camera
PylonCamera.blacs_workers.Pylon_Camera - класс labscript_devices.PylonCamera.blacs_workers.Pylon_Camera( серийный_номер )[источник]
Основания:
объект- abort_acquisition()[источник]
- закрыть()[источник]
- configure_acquisition ( Continuous = True , bufferCount = 10 ) [источник]
Настройте получение, вызвав StartGrabbing с соответствующими
стратегия захвата: LatestImageOnly для непрерывного, OneByOne в противном случае.
- get_attribute( имя )[источник]
Возвращает текущее значение атрибута с заданным именем
- get_attributes( visibility_level , writeable_only=True )[источник]
Вернуть список всех атрибутов читаемых атрибутов для данного
уровень видимости. Необязательно возвращайте только записываемые атрибуты.
- захватить ( непрерывный = True ) [источник]
Захват одиночного изображения во время предварительно настроенного захвата.
- Grab_multiple( n_images , изображений )[источник]
Захват n_images в массив изображений во время буферизованного сбора.
- set_attribute ( имя , значение ) [источник]
Установить значение атрибута данного имени на заданное значение
- set_attributes ( attribute_dict ) [источник]
Устанавливает все атрибуты в attr_dict.
Камеры Pylon требуют, чтобы настройки ROI выполнялись в правильном порядке.
поэтому мы делаем их отдельно.
- snap()[источник]
Получить одно изображение и вернуть его
- stop_acquisition()[источник]

| # Grab_MultipleCameras.cpp | |
| # =============================================== ============================ | |
| # В этом примере показано, как захватывать и обрабатывать изображения с нескольких камер | |
| # с использованием класса CInstantCameraArray. Класс CInstantCameraArray представляет | |
| # массив мгновенных объектов камеры. Он обеспечивает почти такой же интерфейс | |
| # как мгновенная камера для захвата. | |
| # Основная цель CInstantCameraArray — упростить ожидание изображений и | |
# события камеры нескольких камер в одном потоке. Это делается путем предоставления одного Это делается путем предоставления одного | |
| # Метод RetrieveResult для всех камер в массиве. | |
| # В качестве альтернативы захват можно запустить с помощью внутренних нитей петли захвата | |
| # всех камер в CInstantCameraArray. Затем захваченные изображения могут быть обработаны одним или несколькими | |
| # обработчики событий изображения. Обратите внимание, что в данном примере это не показано. | |
| # =============================================== ============================ | |
| импорт ОС | |
os. environ[«PYLON_CAMEMU»] = «3» environ[«PYLON_CAMEMU»] = «3» | |
| из импорта pypylon genicam | |
| от импортного пилона pypylon | |
| система импорта | |
| # Количество изображений, которые нужно захватить. | |
| countOfImagesToGrab = 10 | |
| # Ограничивает количество камер, используемых для захвата. | |
# Важно управлять доступной полосой пропускания при захвате с нескольких камер. | |
| # Это применимо, например, если две камеры GigE подключены к одному и тому же сетевому адаптеру через коммутатор. | |
| # Для управления пропускной способностью, параметром межпакетной задержки GevSCPD и задержкой передачи GevSCFTD | |
| Параметр | # может быть установлен для каждого устройства камеры GigE. |
| # «Управление временем передачи пакетов с помощью задержек между пакетами и передачей кадров на камерах Basler GigE Vision» | |
| # Замечания по применению (AW000649xx000) | |
| # предоставьте дополнительную информацию по этой теме. | |
# Пропускная способность, используемая камерой FireWire, может быть ограничена путем настройки размера пакета. | |
| maxCamerasToUse = 2 | |
| # Код выхода примера приложения. | |
| код выхода = 0 | |
| попробовать: | |
| # Получить фабрику транспортного уровня. | |
| tlFactory = pylon.TlFactory.GetInstance() | |
# Получить все подключенные устройства и выйти из приложения, если устройство не найдено. | |
| устройств = tlFactory.EnumerateDevices() | |
| , если len(устройства) == 0: | |
| поднять pylon.RuntimeException(«Камера отсутствует») | |
| # Создайте массив мгновенных камер для найденных устройств и избегайте превышения максимального количества устройств. | |
| камеры = pylon.InstantCameraArray(min(len(devices), maxCamerasToUse)) | |
| л = камеры.GetSize() | |
# Создайте и подключите все устройства Pylon. | |
| для i, камера в списке (камеры): | |
| cam.Attach (tlFactory.CreateDevice (устройства [i])) | |
| # Напечатать название модели камеры. | |
| print(«Использование устройства», cam.GetDeviceInfo().GetModelName()) | |
| # Начинает захват для всех камер, начиная с индекса 0. Захват | |
| # запускается для одной камеры за другой. Вот почему изображения всех | |
| # камеры одновременно не снимаются. | |
# Однако можно использовать настройку аппаратного триггера, чтобы все камеры синхронно захватывали изображения. | |
| # Согласно конфигурации по умолчанию камеры имеют номер | |
| # настроен для автономного непрерывного сбора данных. | |
| камер.StartGrabbing() | |
| # Захват c_countOfImagesToGrab с камер. | |
| для i в диапазоне (countOfImagesToGrab): | |
| , если не камеры.IsGrabbing(): | |
| перерыв | |
grabResult = камеры.RetrieveResult(5000, pylon. TimeoutHandling_ThrowException) TimeoutHandling_ThrowException) | |
| # При создании камер в массиве значение контекста камеры | |
| # устанавливается на индекс камеры в массиве. | |
| # Контекст камеры задается пользователем. | |
| # Это значение прикрепляется к каждому результату захвата и может использоваться | |
| # для определения камеры, выдавшей результат захвата. | |
| cameraContextValue = grabResult.GetCameraContext() | |
# Распечатать индекс и название модели камеры. | |
| print(«Камера», cameraContextValue, «:», camera[cameraContextValue].GetDeviceInfo().GetModelName()) | |
| # Теперь можно обрабатывать данные изображения. | |
| print(«GrabSucceeded: «, grabResult.GrabSucceeded()) | |
| print(«SizeX: «,grabResult.GetWidth()) | |
| print(«SizeY: «,grabResult.GetHeight()) | |
| img = грабитьРезультат.GetArray() | |
| print(«Значение серого для первого пикселя: «, img[0, 0]) | |
, кроме genicam.
|
 py на мастере · basler/pypylon · GitHub
py на мастере · basler/pypylon · GitHub