Содержание
Асинхронный двигатель с фазным ротором: устройство, принцип работы (видео)
Асинхронный двигатель с фазным ротором имеет очень обширную область обслуживания. АД (асинхронный двигатель) чаще применяется в управлении двигателями большой мощности. Обслуживание и управление приводов мельниц, станков, насосов, кранов, дымососа, дробилок. Асинхронный двигатель с массивным ротором даёт возможность подключения множества технических механизмов.
Характеристика асинхронного двигателя
Преимущества использования:
- Запуск двигателя с нагрузкой, подключение к валу благодаря созданию большого момента вращения. Это обеспечивает обслуживание асинхронных двигателей с фазовым элементом любой мощности.
- Возможность постоянной скорости вращения большой или маленькой нагрузки
- Регулирование автоматического пуска.
- Работа даже при перегрузке тока напряжения.
- Простота использования.
- Невысокая стоимость.
- Надёжность применения.
Недостатки применения
- Использование резисторов увеличивается стоимость, а работа двигателя усложняется,
- Большие размеры,
- Значение КПД меньше, чем короткозамкнутых роторов,
- Трудное управление скоростью вращения,
- Регулярный капитальный ремонт .


Схема подключения
При подключении к току начинают работать реле времени. Контакты размыкаются. При нажатии тумблера происходит пуск.
Чтобы подключить АД нужно правильно обозначить концы и начала обмоток фазы.
Устройство двигателя
Главными постоянными являются статор и ротор. Статор представляет собой цилиндр, состав –листы электротехнической стали, в цилиндр уложена трёхфазная обмотка. Она состоит из обмоточной проволоки. Которые соединены между собой в виде звезды или треугольника в зависимости от напряжения.
Ротор – основная вращающаяся часть двигателей. Он в зависимости от расположения может быть внешним, внутренним. Данный элемент состоит из стальных листов. Пазы сердечника наполнены алюминием, который имеет стержни, содержащие торцевые кольца. Они могут быть латунными или стальными, каждое из них изолировано слоем лака. Между трёхфазным статором и ротором образуется зазор. Регулирование размер зазора от 0,30 –0,34 мм в устройствах с небольшим напряжением, 1,0–1,6 мм в устройствах с большим постоянным электрическим напряжением. Конструкция имеет название беличья клетка. Для мощных двигателей используется медь в сердечнике. Контактор начинает действие, двигатель заводится.
Конструкция имеет название беличья клетка. Для мощных двигателей используется медь в сердечнике. Контактор начинает действие, двигатель заводится.
Существует добавочный резистор в цепи обмотки вращающей части машины, крепится с помощью металлографитных щеток. Щетки обычно используются две, расположены на щеткодержателе. В приводах кранах и центрифугах для регулирования роботы применяется конический подвижный ротор. Асинхронные двигатели с фазным ротором незаменимы при технических требованиях мощного пускового момента. Это могут быть такие механизмы, как кран, мельница, лифт.
Схема переключения электрической цепи со звезды на треугольник
Принцип работы
В основе АД лежит вращение поля магнитов. В область обмотки трёхфазного статора поступает ток, а в фазах возникает поток магнитов, изменяемый в зависимости от скорости и частоты постоянной электрической мощности.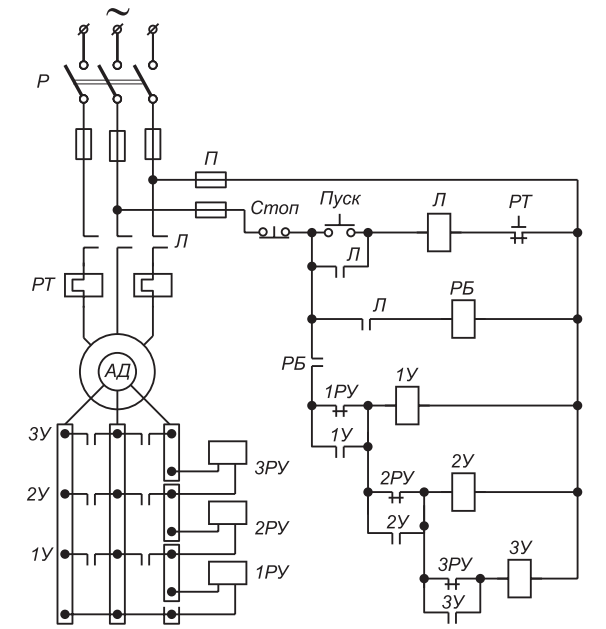 При статорном вращении возникает электродвижущая сила.
При статорном вращении возникает электродвижущая сила.
В роторную обмотку подходит напряжение, которое совместно с постоянным магнитным потоком статора образует пуск. Он стремится направить ротор по магнитному вращению статора и при достижении превышения момента торможения, приводит к скольжению. Оно выражает отношение между частотами статорного силового поля магнитов и скоростью роторного вращения.
Чертеж режима кз
При балансе между моментами электромагнита и торможения, перемена значений остановится. Особенность эксплуатации АД – сольватация кругового движения силового поля статора и им наводящих токов в роторе. Момент вращения возникает лишь при разнице частот круговых движений магнитных полей.
Машины различают синхронные, асинхронные. Разница механизмов в их обмотке. Она образует магнитное поле.
Неподвижность ротора и замыкание обмотки приводит к короткому замыканию (кз).
Расчёт числа повторений
Возьмём m1 – процесс повторения постоянного поля магнитов и ротора. Система фазы переменного тока образуют вращение поля магнитов.
Система фазы переменного тока образуют вращение поля магнитов.
Данные расчета считаются по формуле:
m1=60f1/p
f1– частота электричества$
p – количество полюсных пар каждой обмотки статора.
m2 – процесс повторения вращения ротора. Имея различное количество одновременных повторений, данная скорость частоты будет асинхронной. Определение расчёта частоты проводится по соотношению между данными:
(m2≠m1)
Асинхронный электродвигатель работает только при асинхронной частоте.
(m2<,m1)
При одновременном вращении статора и ротора, расчет скольжения будет равняться нулю.
Двухроторный АД используется для привода разных механизмов. Различие двухроторного двигателя заключается присутствием в конструкции двух роторов. Второй ротор выполняет функцию вспомогательную, может вращаться с другой скоростью. Вспомогательный ротор представляет собой внутренний хомут для замыкания постоянного потока магнитов, охлаждения электродвигателя. Недостаток двухмоторного асинхронного двигателя в низком КПД от использования ферромагнитного вспомогательного ротора.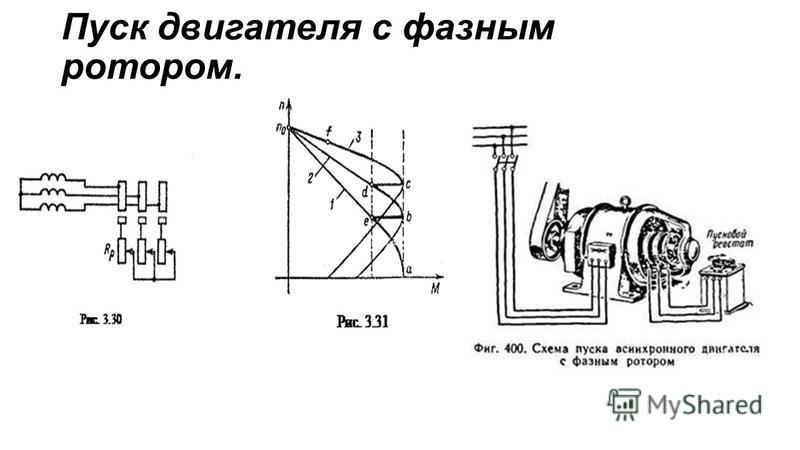
В ходе исследования двухроторных машин достигаются близкие данные скоростик желаемым, когда вспомогательный ротор имеет максимальные вентиляционные зазоры. Полый ротор установлен на ступице, его вал расположен внутри цилиндра. При вращении вспомогательного ротора вентиляция работает по принципу центробежного вентилятора. Для увеличения пускового момента и большей электрической нагрузки полый ротор должен регулироваться, перемещаясь вдоль вала, с установленным штифтом, конец чего входит в паз ступицы ротора.
Данные для расчета:
Реостатный пуск
Часто для включения двигателя безмощных пусковых моментов оказывают нужное действие реостаты. Схема реостатного способа:
Главной характеристикой метода является присоединение двигателя при пуске к реостатам. Реостаты разрываются (на чертеже К1), на них идет частично электрический ток. Что дает возможность уменьшить пусковые токи. Пусковой момент тоже снижается. Преимущество реостатного способа заключается в снижении нагрузки на механическую часть и нехватку напряжения.
Пусковой момент тоже снижается. Преимущество реостатного способа заключается в снижении нагрузки на механическую часть и нехватку напряжения.
Ремонт и характеристики неисправностей
Причиной ремонта могут служить внешние и внутренние причины.
Внешние причины ремонта:
- обрыв провода или нарушение соединений с электрическим током,
- сгорание предохранителей,
- понижение или повышения напряжения,
- перегруженность АД,
- неравномерная вентиляция в зазоре.
Внутренняя поломка может возникнуть по механическим и электрическим причинам.
Механические причины ремонта:
- неправильное регулирование зазора подшипников,
- повреждение вала ротора,
- расшатывание щеткодержателей,
- возникновение глубоких выработок,
- истощение креплений и трещины.
Электрические причины ремонта:
- замыкания витков,
- поломка провода в обмотках,
- пробивание изоляции,
- пробой пайки проводов.

Данные причины – это далеко не полный список поломок.
Асинхронный двигатель – незаменимый и важный механизм, применяемый для обслуживания быта и различных отраслей промышленности. Для практического действия АД с фазным ротором необходимо знать техническую характеристику управления, использовать его по назначению и регулярно проводить ремонт при технических осмотрах. Тогда асинхронный двигатель станет практически вечной эксплуатации.
Пуск двигателей в ход с фазным и короткозамкнутым ротором
Пуск двигателей в ход с фазным и короткозамкнутым ротором
Цель: Изучить пуск двигателей в ход с фазным и короткозамкнутым ротором
План:
1.Выведение двигателя на нормальный режим.
2.Пуск с помощью пускового реостата.
3.Пуск при пониженном напряжении.
4. Улучшение пусковых характеристик двигателей с короткозамкнутым ротором.
Выведение двигателя на нормальный режим.
Выведению двигателя на нормальный режим предшествует его пуск, в процессе которого он трогается с места и разгоняется до частоты вращения, соответствующей нагрузке.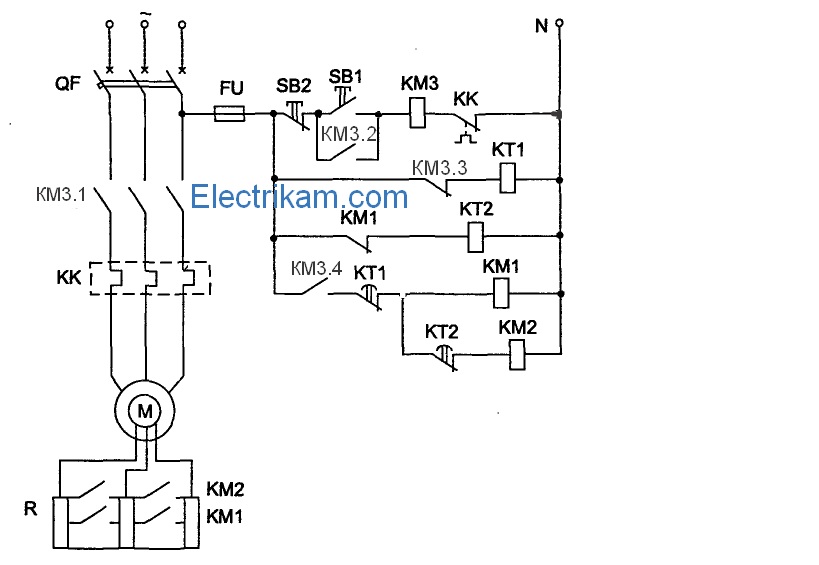 В момент пуска частота вращения n2=0, а скольжение s=1. Пусковой ток статора I1п можно определить по формуле, в которой s = 1:
В момент пуска частота вращения n2=0, а скольжение s=1. Пусковой ток статора I1п можно определить по формуле, в которой s = 1:
Так как в рабочем режиме s=0,03 — 0,06, т. е. много меньше 1, то , вследствие чего пусковой ток в 5—7 раз больше номинального.
Таким образом, при подаче полного напряжения сети U1 на обмотку статора имеет место бросок пускового тока, который затем уменьшается по мере разгона двигателя, уменьшения скольжения и увеличения сопротивления. Такое увеличение тока в сети может привести к снижению напряжения, если мощность источника питания соизмерима с мощностью двигателя, что отрицательно скажется на работе других электроприёмников, подключенных к тому же источнику энергии. Протекание пускового тока по обмоткам может сказаться неблагоприятно и на самом двигателе. Если двигатель разгоняется длительное время или осуществляются его частые пуски, то обмотки могут нагреваться до температуры больше допустимой.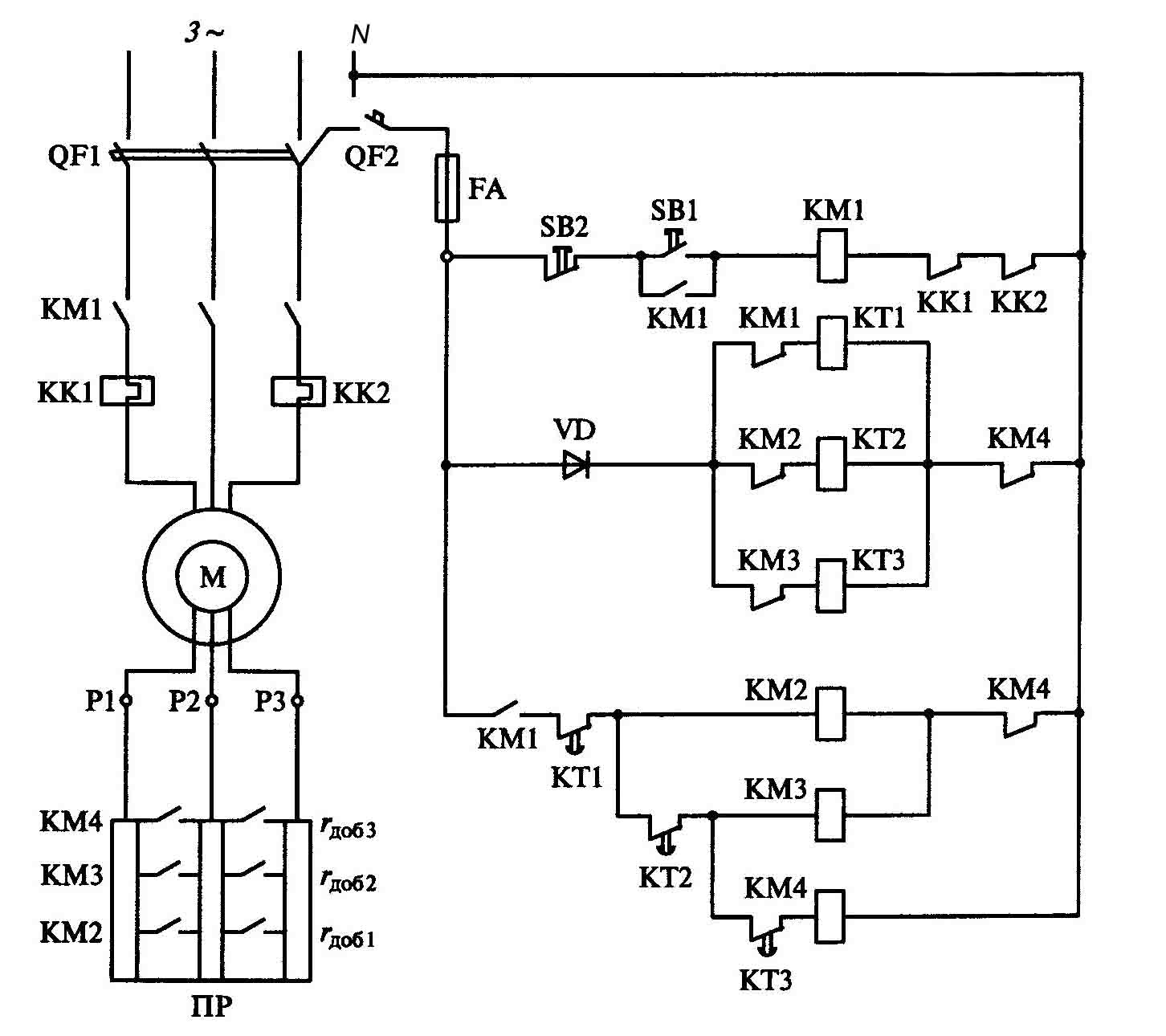 Поэтому при пуске двигателя необходимо снижать пусковой ток. Это осуществляют подключением пускового реостата к обмотке фазного ротора и понижением на период пуска подводимого к статору напряжения
Поэтому при пуске двигателя необходимо снижать пусковой ток. Это осуществляют подключением пускового реостата к обмотке фазного ротора и понижением на период пуска подводимого к статору напряжения
Пуск с помощью пускового реостата.
Этот способ применяют только для двигателей с фазным ротором. Трехфазный пусковой реостат, соединенный по схеме звезды, включают последовательно с обмоткой ротора через щетки и кольца (рис.61, а). В результате сопротивление цепи ротора увеличивается, а пусковой ток уменьшается.
Рис.6.1 Пуск асинхронного двигателя с фазным ротором:
а — схема включения пускового реостата; б — механические характеристики.
Сопротивление пускового реостата можно подобрать так, что пусковой момент будет равен максимальному (Мп = Мmах). Для этого необходимо, чтобы sкр = 1. Воспользовавшись формулой получаем:
откуда
При включении пускового реостата сопротивлением двигатель трогается с места при (Мп = Мmах) (характеристика 1 на рис. 6.1.б). По мере того, как увеличивается частота вращения двигателя, сопротивление пускового реостата уменьшают. Этому соответствует переход на новую механическую характеристику (2 на рис.6.1. б). Когда пусковой реостат полностью выведен, разгон двигателя заканчивается в соответствии с естественной характеристикой 4. Такое изменение сопротивления пускового реостата обеспечивает условия разгона двигателя при моментах, близких к максимальному, благодаря чему сокращается время пуска. Это особенно важно, когда пуск двигателя осуществляют под нагрузкой.
6.1.б). По мере того, как увеличивается частота вращения двигателя, сопротивление пускового реостата уменьшают. Этому соответствует переход на новую механическую характеристику (2 на рис.6.1. б). Когда пусковой реостат полностью выведен, разгон двигателя заканчивается в соответствии с естественной характеристикой 4. Такое изменение сопротивления пускового реостата обеспечивает условия разгона двигателя при моментах, близких к максимальному, благодаря чему сокращается время пуска. Это особенно важно, когда пуск двигателя осуществляют под нагрузкой.
Асинхронные двигатели с фазным ротором сложнее по конструкции н дороже двигателей с короткозамкнутым ротором. Но в связи с тем, то при пуске они могут развивать максимальный момент, их применяют в установках с тяжелыми условиями пуска (подъемные краны, лебедки, лифты и др.).
Пуск при пониженном напряжении.
Этот способ применяют для двигателей с короткозамкнутым ротором. Так как вращающий момент пропорционален квадрату напряжения, такой способ пуска применим только при отсутствии нагрузки на валу двигателя.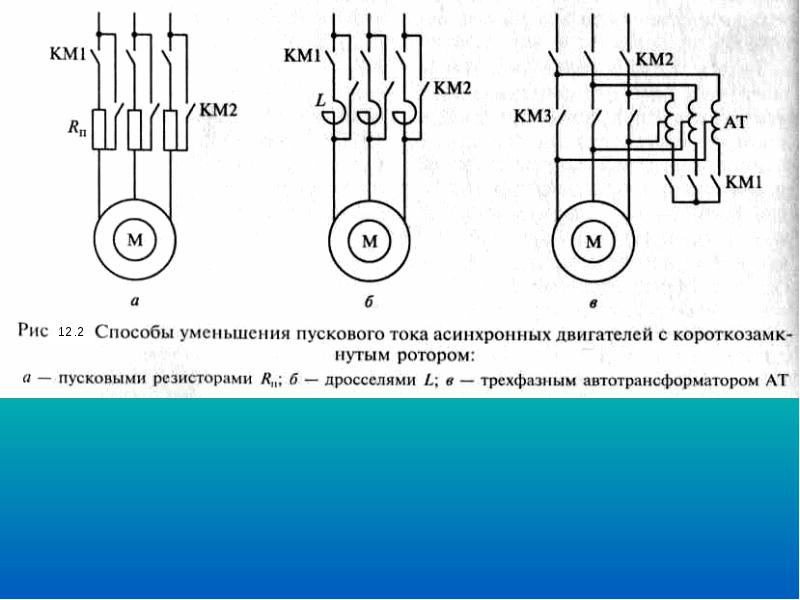
Если в нормальном режиме обмотки статора двигателя соединены треугольником, то для пуска их соединяют звездой (рис.6.2), что приводит к уменьшению напряжения на обмотке в раза. Во столько же раз уменьшается и фазный ток в обмотке статора. Так как при соединении звездой линейный ток равен фазному, а при соединение треугольником он больше фазного в раза, то при переключении обмоток двигателя на звезду линейный ток уменьшается в три раза. Это значит, что пусковой ток в сети при соединении обмотки звездой и вращающий момент также уменьшаются в три раза. После разгона двигателя обмотку статора переключают на треугольник.
Рис.6.2. Схема пуска асинхронного двигателя с коротко- замкнутым ротором путем переклю чения обмотки статора со звезды в треугольник
Рис.6.3. Схемы пуска асинхронного двигателя с короткозамкнутым ротором при понижении напря
жения с помощью а—резисторов; б—ндуктивных элементов
Для понижения напряжения на время пуска последовательно с обмоткой статора можно включать элементы с активным (рис. 6.3, а) или индуктивным (рис.6.3, б) сопротивлением. После окончания пуска эти элементы шунтируются.
6.3, а) или индуктивным (рис.6.3, б) сопротивлением. После окончания пуска эти элементы шунтируются.
Рис.6.4 Схема пуска асинхронного двигателя с Рис 6.5. Схема прямого включения в
короткозамкнутым ротором с помощью сеть асинхронного двигателя с
авто трансформатора короткозамкнутым ротором
Понизить напряжение и уменьшить пусковой ток можно с помощью автотрансформатора (рис.6.4). При пуске двигателя в. включатель В1 включен, а В2 выключен. По мере разгона двигателя с помощью автотрансформатора повышаю т напряжение. После разгон двигателя выключают В1 и включают В2, при этом напряжение сети непосредственно подается на статор двигателя. Эта схема сложнее дороже и менее надежна по сравнению сопредставленными на рис.6.3.
Рис.6.6. Магнитный поток рассеяния фазы ротора (а) глубокопазного двигателя
и распределение плотности тока по высоте проводника фазы (б).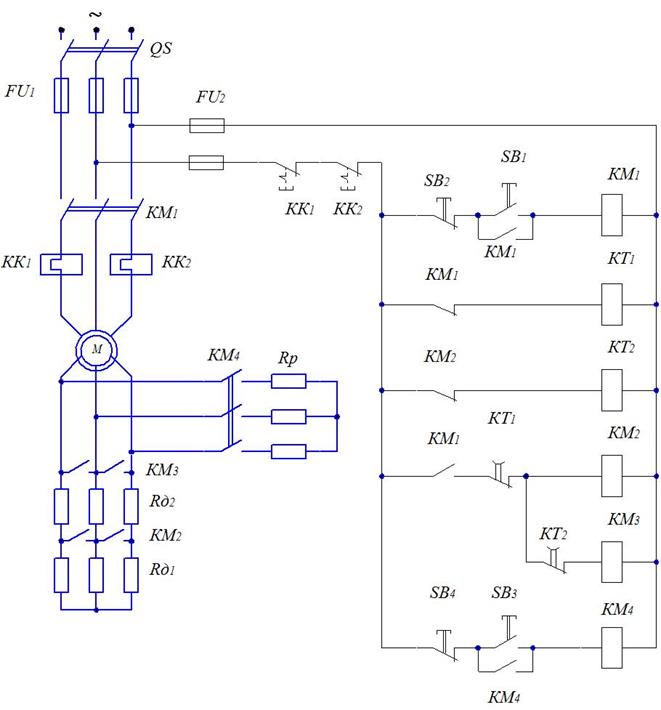
В схеме прямого включения (рис.6.5), применяемой только для двигателей малой и средней мощности, предельная мощность двигателя зависит от мощности источник питания и требований других электроприемников к допустимому снижении напряжения.
Улучшение пусковых характеристик двигателей с короткозамкнутым ротором.
Из-за большого пускового тока и малого пускового момента мощность двигателя с короткозамкнутым ротором, для которого применим прямой пуск, ограничена.
Из анализа механических характеристик видно, что при увеличении сопротивления обмотки ротора пусковой момент увеличивается. Но чтобы такое увеличение сопротивления обмоткой ротора иметь только на момент пуска, пазы ротора делают глубокими. Такие двигатели называют глубокопазными. Магнитный поток рассеяния Фрас 2, создаваемый фазным током ротор, (током в отдельном стержне), стремится замкнуться по пути с наименьшим магнитным сопротивлением (рис.6.6, а). Проводник обмотки ротора можно представить состоящим из отдельных элементарных плоских проводников, расположенных друг над другом по высоте паза. Так как в момент пуска частота тока ротора равна частоте тока статора, то элементарные проводники, расположенные внизу паза, сцеплены с большим потоком рассеяния большой частоты. Их индуктивное сопротивление в связи с этим настолько велико, что по ним протекает очень небольшой ток (рис.6.6, б). Почти весь ток вытесняется в верхние слои проводника фазы ротора. Это эквивалентно уменьшению сечения проводника, а следовательно, увеличению его активного сопротивления , что приводит к увеличению пускового момента.
Так как в момент пуска частота тока ротора равна частоте тока статора, то элементарные проводники, расположенные внизу паза, сцеплены с большим потоком рассеяния большой частоты. Их индуктивное сопротивление в связи с этим настолько велико, что по ним протекает очень небольшой ток (рис.6.6, б). Почти весь ток вытесняется в верхние слои проводника фазы ротора. Это эквивалентно уменьшению сечения проводника, а следовательно, увеличению его активного сопротивления , что приводит к увеличению пускового момента.
|
|
Рис.6.7.Магнитный поток рассеяния ротора (а) двигателя с двойной клеткой (1-паз пусковой обмотки, 2-паз рабочей обмотки) и зависимости M = f(s) (б) для пусковой обмотки (1) рабочей обмотки (2) ; для суммарного момента (3).
Для улучшения пусковых характеристик применяют также ротор с двумя коротко замкнутыми обмотками. Одна из обмоток располагается ближе к поверхности ротора, выполняется из проводников меньшего сечения (иногда из материала с большим удельным сопротивлением — марганцовистой латуни или бронзы). Вторая (внутренняя) обмотка имеет большее сечение, и ее стержни изготовляют из меди. Таким образом, активное сопротивление наружной обмотки больше, чем сопротивление внутренней обмотки. Каждая из обмоток создает свой вращающий момент, а их сумма равна вращающему моменту двигателя.
Одна из обмоток располагается ближе к поверхности ротора, выполняется из проводников меньшего сечения (иногда из материала с большим удельным сопротивлением — марганцовистой латуни или бронзы). Вторая (внутренняя) обмотка имеет большее сечение, и ее стержни изготовляют из меди. Таким образом, активное сопротивление наружной обмотки больше, чем сопротивление внутренней обмотки. Каждая из обмоток создает свой вращающий момент, а их сумма равна вращающему моменту двигателя.
Картина магнитного потока рассеяния Фрас 2 такая же (рис.6.7, а), как у двигателя с глубоким пазом. В момент пуска, когда частота тока ротора велика, внутренняя обмотка имеет большое индуктивное сопротивление и ток в ней мал. Поэтому она создает небольшой пусковой момент. Индуктивное же сопротивление наружной обмотки мало, и по ней протекает большой ток, определяемый ее активным сопротивлением. Этот активный ток создает значительный пусковой момент. Поэтому наружная обмотка называется пусковой. По окончании разгона двигателя индуктивное сопротивление обмоток уменьшается, и ток в них практически определяется их активными сопротивлениями. Так как активное сопротивление внутренней обмотки много меньше, чем наружной обмотки, то основная часть тока ротора в рабочем режиме замыкается по внутренней обмотке. Эта обмотка называется рабочей обмоткой.
Так как активное сопротивление внутренней обмотки много меньше, чем наружной обмотки, то основная часть тока ротора в рабочем режиме замыкается по внутренней обмотке. Эта обмотка называется рабочей обмоткой.
Для пусковой обмотки согласно зависимости (1 на рис.6.7, 6) скольжение sкр велико. Для рабочей обмотки значение sкр такое же, как для обычных короткозамкнутых двигателей (2 на рис.6.7, 6). Зависимость суммарного момента характеризуется большим значением пускового момента. Для двигателей c двойной клеткой кратность пускового момента , а кратность пускового тока .
Двигатели с улучшенными пусковыми характеристиками имеют несколько меньший коэффициент мощности, так как углубление паза (или рабочей обмотки) увеличивает поток рассеяния и индуктивное сопротивление ротора.
Контрольные вопросы:
1.В каких условия двигатель работает на нормальном режиме?
2.Пуск с помощью пускового реостата?
3.Как можно улучшить пуск при пониженном напряжении.
Литература:
1. Вольдек А.И. «Электрические машины», Л, 1978 г.
Вольдек А.И. «Электрические машины», Л, 1978 г.
2. Копилов И.П. «Электрические машины», Л, 1986 г.
3. http://www.i-en.ru
Трехфазный асинхронный двигатель с фазным ротором
ЦЕЛИ
• перечислите основные компоненты многофазного асинхронного двигателя с фазным ротором.
• опишите, как развивается синхронная скорость в этом типе двигателя.
• опишите, как регулятор скорости подключен к щеткам двигателя
обеспечивает диапазон переменной скорости для двигателя.
• указать, как крутящий момент, регулирование скорости и эффективность работы
двигатель зависит от регулятора скорости.
• продемонстрировать, как изменить направление вращения фазного ротора
Индукционный двигатель.
До последних нескольких лет управление переменной скоростью переменного тока было очень сложным.
со стандартным мотором. Поэтому другой тип двигателя и управления
Система была разработана и широко использовалась в течение многих лет.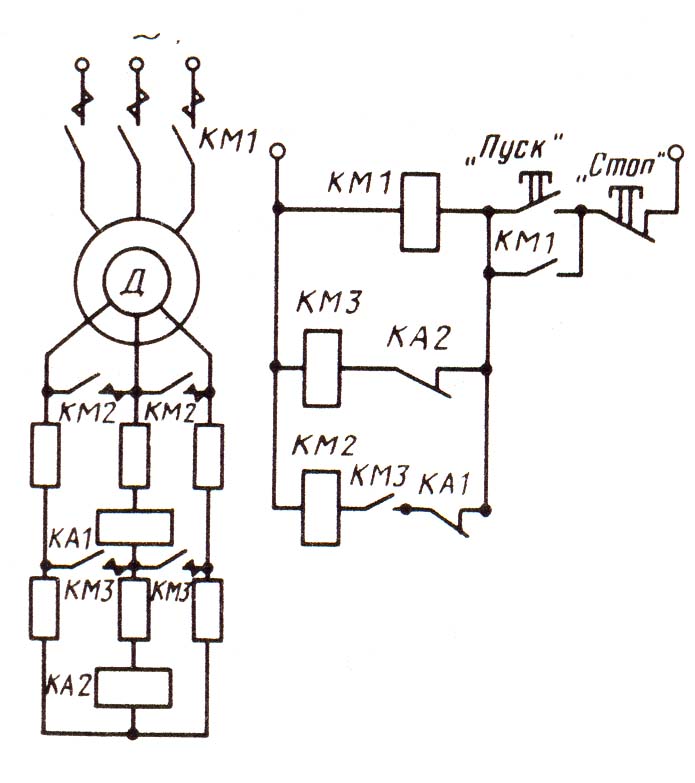 Электрики по обслуживанию
Электрики по обслуживанию
должен быть знаком с этим типом двигателя и системой управления.
Для многих промышленных двигателей требуются трехфазные двигатели с переменным
контроль скорости. Асинхронный двигатель с короткозамкнутым ротором нельзя использовать для переменного тока.
скорость работы, так как ее скорость практически постоянна. Другой вид индукции
двигатель был разработан для приложений с переменной скоростью. Этот мотор называется
асинхронный двигатель с фазным ротором или двигатель переменного тока с контактными кольцами.
ДЕТАЛИ КОНСТРУКЦИИ
Трехфазный асинхронный двигатель с фазным ротором состоит из сердечника статора с
трехфазная обмотка, фазный ротор с контактными кольцами, щетки и щетки
держатели и два торцевых щита для размещения подшипников, поддерживающих ротор
вал.
рис. 1, 2, 3 и 4 показывают основные части трехфазного,
асинхронный двигатель с фазным ротором.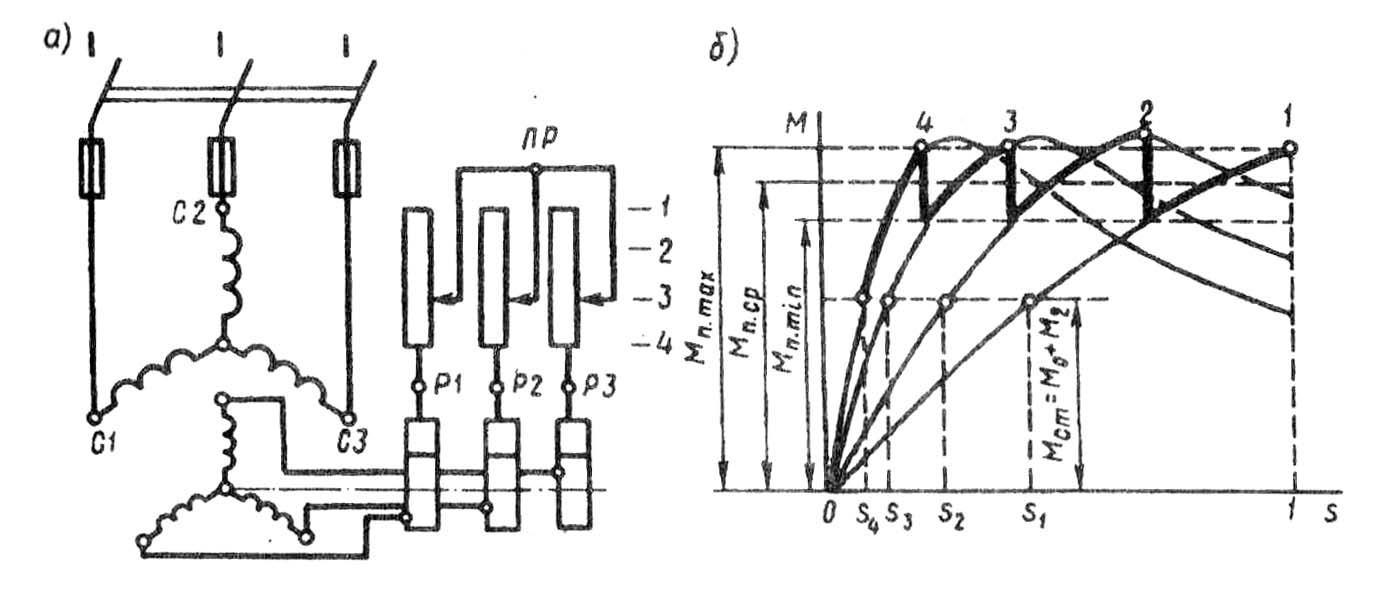
ил. 1 Детали двигателя с фазным ротором
больной. 2 Обмоточный статор для многофазного асинхронного двигателя
ил. 3 Ротор с обмоткой для многофазного асинхронного двигателя
ил. 4 Подшипник скольжения, многофазный асинхронный двигатель с фазным ротором (General Electric Company)
Статор
Типичный статор содержит трехфазную обмотку, закрепленную в пазах.
из пластинчатого стального сердечника, рис. 2. Обмотка состоит из формованных
катушки расположены и соединены так, что имеется три однофазных обмотки
на расстоянии 120 электрических градусов друг от друга. Отдельные однофазные обмотки
соединены либо звездой, либо треугольником. Выведены три линейных провода
к клеммной коробке, установленной на раме двигателя. Это же конструкция
как статор двигателя с короткозамкнутым ротором.
Ротор
Ротор состоит из цилиндрического сердечника, состоящего из стальных пластин.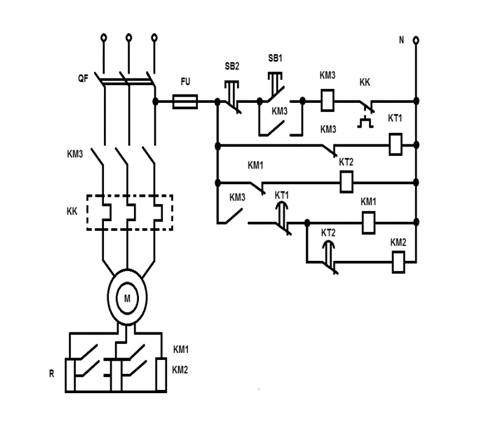
Прорези, прорезанные в цилиндрическом сердечнике, удерживают сформированные витки проволоки для
обмотка ротора.
Обмотка ротора состоит из трех однофазных обмоток, разнесенных на 120 электрических
градусов друг от друга. Однофазные обмотки соединены звездой или
дельта. (Обмотка ротора должна иметь такое же количество полюсов, как и статор.
обмотки.) Три провода от трехфазной обмотки ротора заканчиваются
на трех контактных кольцах, установленных на валу ротора. Поводки от угольных щеток
которые ездят на этих контактных кольцах, подключены к внешнему регулятору скорости
для изменения сопротивления ротора для управления скоростью.
Щетки надежно удерживаются на токосъемных кольцах ротора с помощью
регулируемые пружины, установленные в щеткодержателях. Щеткодержатели есть
фиксируется в одном положении. Для этого типа двигателя нет необходимости переключать
положение щетки, которое иногда требуется при работе генератора постоянного тока и двигателя.
Рама двигателя
Корпус двигателя изготовлен из литой стали. Сердечник статора прессуется непосредственно
в кадр. Два торцевых щита крепятся болтами к литой стальной раме. Один
торцевых щитов больше, чем другой, потому что он должен вмещать щетку
держатели и щетки, которые перемещаются по токосъемным кольцам ротора. В
кроме того, он часто содержит съемные инспекционные крышки.
Подшипниковый узел такой же, как и в индукционных асинхронных двигателях с короткозамкнутым ротором.
моторы. В конце используются либо подшипники скольжения, либо шарикоподшипниковые узлы.
щиты.
ПРИНЦИП ДЕЙСТВИЯ
Когда три тока, разнесенные на 120 электрических градусов, проходят через три
однофазные обмотки в пазах сердечника статора, вращающийся магнитный
поле разрабатывается. Это поле движется вокруг статора. Скорость
вращающееся поле зависит от числа полюсов статора и частоты
источника питания. Эта скорость называется синхронной скоростью. Это
Эта скорость называется синхронной скоростью. Это
определяется по формуле, которая использовалась для нахождения синхронного
скорость вращающегося поля асинхронных двигателей с короткозамкнутым ротором.
Синхронная скорость в об/мин = [120 x частота в герцах / число полюсов]
или S=120 х F/P
S= 120 x f/P
Поскольку вращающееся поле движется с синхронной скоростью, оно прерывает трехфазное
обмотку ротора и индуцирует напряжения в этой обмотке. Обмотка ротора
соединен с тремя контактными кольцами, установленными на валу ротора. Кисти
на токосъемных кольцах подключаются к внешней группе, соединенной звездой.
резисторов (регулятор скорости), рис. 5. Наведенные напряжения в
обмотки ротора создают токи, которые следуют по замкнутому пути от ротора
обмотка к регулятору скорости, соединенному звездой. Токи ротора создают
магнитное поле в сердечнике ротора на основе действия трансформатора. Этот ротор
Поле взаимодействует с полем статора, создавая крутящий момент, который вызывает
ротор крутить.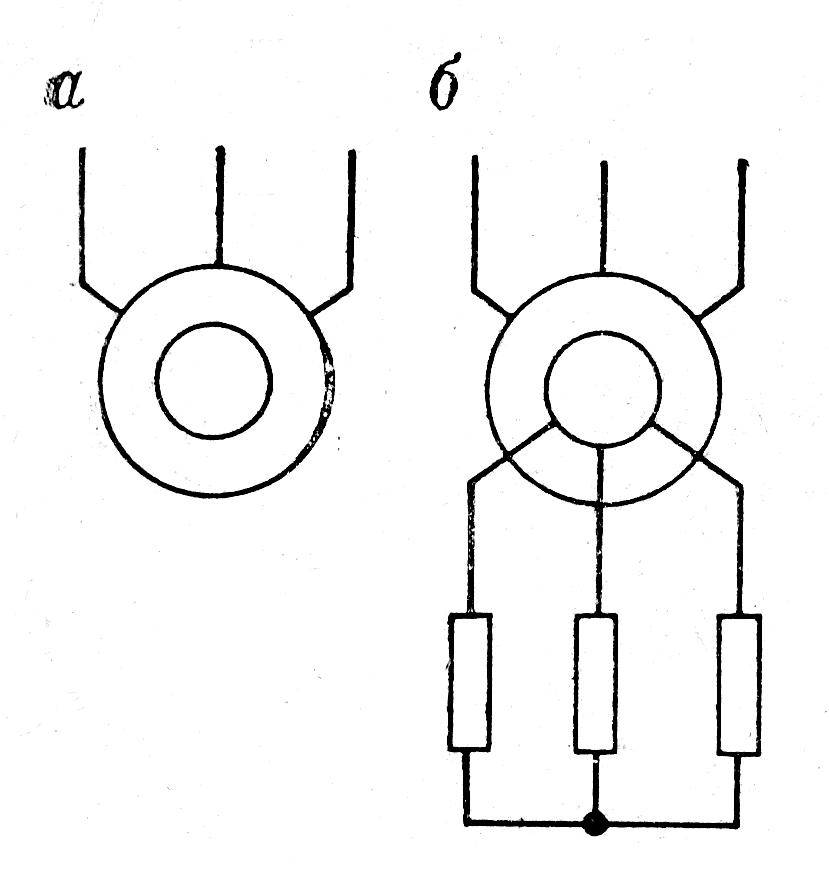 Регулятор скорости иногда называют вторичным сопротивлением.
Регулятор скорости иногда называют вторичным сопротивлением.
контроль.
Теория пуска асинхронных двигателей с фазным ротором
Для запуска двигателя все сопротивления регулятора скорости, соединенного звездой
включается в цепь ротора. Цепь статора находится под напряжением
трехфазная линия. Напряжение, индуцируемое в роторе, создает токи
в цепи ротора. Однако токи ротора ограничены по величине.
сопротивлением регулятора скорости. В результате ток статора
также ограничен в стоимости. Другими словами, чтобы свести к минимуму начальный помпаж
тока к асинхронному двигателю с фазным ротором, введите полное сопротивление
регулятора скорости в цепи ротора. На пусковой момент влияет
сопротивлением, включенным во вторичную обмотку ротора. С сопротивлением в
во-вторых, коэффициент мощности ротора высок или близок к единице. Этот
означает, что ток ротора почти совпадает по фазе с индуцированным ротором
Напряжение. Если ток ротора совпадает по фазе с напряжением, индуцированным ротором,
Если ток ротора совпадает по фазе с напряжением, индуцированным ротором,
тогда магнитные полюса ротора создаются одновременно с
полюса статора. Это создает сильный магнитный эффект, который создает сильное
пусковой момент. По мере ускорения двигателя ступени сопротивления в схеме, соединенной звездой,
регулятор скорости может быть отключен от цепи ротора до тех пор, пока двигатель не разгонится
до его номинальной скорости.
ил. 5 Соединения для асинхронного двигателя с фазным ротором и регулятора скорости
Регулятор скорости
Введение сопротивления в цепь ротора не только ограничивает пусковой
скачок тока, но также создает высокий пусковой момент и обеспечивает
средство регулировки скорости. Если полное сопротивление регулятора скорости
включается в цепь ротора при работающем двигателе, ротор
ток уменьшается и двигатель замедляется. При уменьшении скорости вращения ротора
В обмотках ротора индуцируется большее напряжение и больше ток ротора.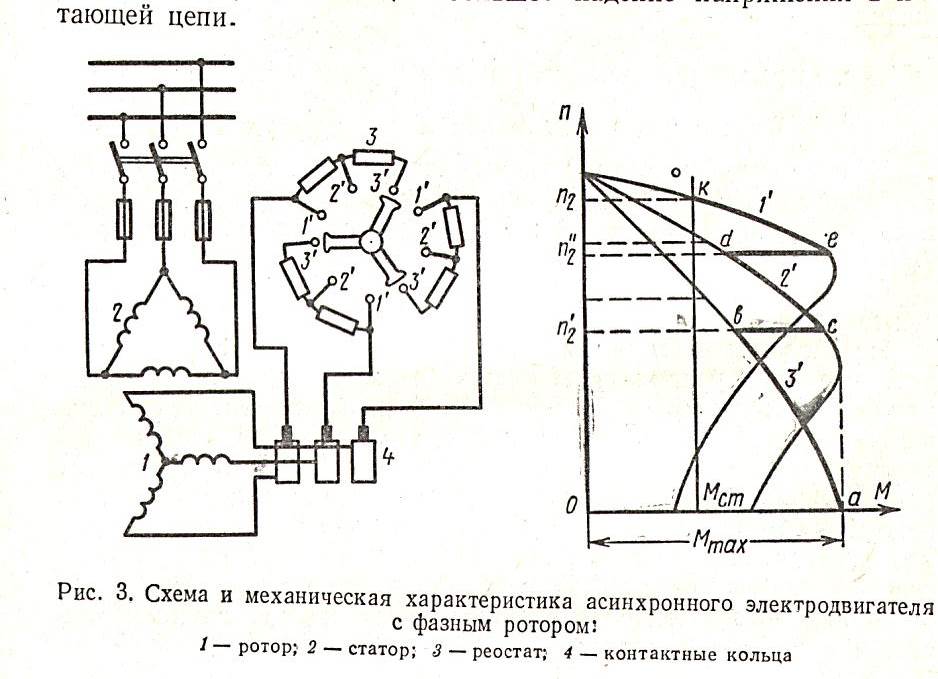
разработан для создания необходимого крутящего момента на пониженной скорости.
Если все сопротивление убрать из цепи ротора, ток и скорость двигателя увеличатся. Однако скорость ротора всегда будет
быть меньше синхронной скорости поля, развиваемого статором
обмотки. Напомним, что этот же факт верен и для индукции в беличьей клетке.
мотор. Скорость двигателя с фазным ротором можно регулировать вручную или автоматически.
с реле времени, контакторами и кнопочным выбором скорости.
больной. 6 Кривые производительности двигателя с фазным ротором.
Крутящий момент
Когда к двигателю прикладывается нагрузка, процент проскальзывания ротора и развиваемый им крутящий момент увеличиваются. Как показано на графике в
На рисунке 6 зависимость между крутящим моментом и процентным скольжением практически
прямая линия.
илл. 6 показано, что характеристики крутящего момента асинхронного двигателя с фазным ротором
двигатель исправен всякий раз, когда вставлено полное сопротивление регулятора скорости
в цепи ротора. Большое сопротивление в цепи ротора
Большое сопротивление в цепи ротора
приводит к тому, что ток ротора находится почти в фазе с наведенным напряжением
ротора. В результате поле, создаваемое током ротора, почти
в фазе с полем статора. Если два поля достигают максимального значения
в тот же момент произойдет сильная магнитная реакция, в результате которой
на выходе с высоким крутящим моментом.
Однако, если все сопротивление регулятора скорости удалить из
цепь ротора и двигатель запущен, крутящий момент плохой.
Цепь ротора за вычетом сопротивления регулятора скорости состоит в основном
индуктивного реактивного сопротивления. Это означает, что ток ротора отстает от
индуцированное напряжение ротора и, таким образом, ток ротора отстает
ток статора. В результате поле ротора, создаваемое током ротора
отстает от поля статора, которое создается током статора.
результирующая магнитная реакция двух полей относительно мала, поскольку
они достигают своих максимальных значений в разных точках.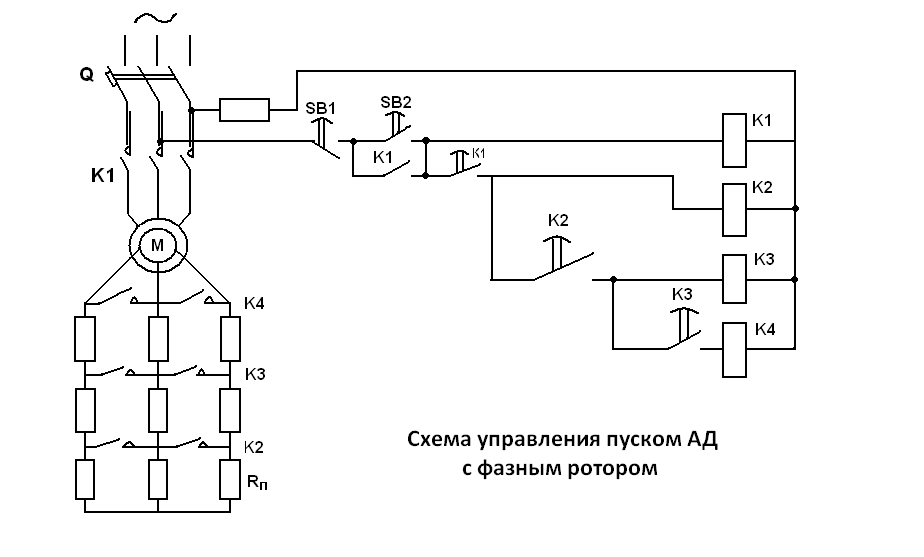 Таким образом,
Таким образом,
выходной пусковой момент асинхронного двигателя с фазным ротором плохой, когда
все сопротивление снимается с цепи ротора.
Регулировка скорости
В предыдущих параграфах было показано, что вставка сопротивления
на регуляторе скорости улучшает пусковой момент двигателя с фазным ротором
на низких скоростях. Однако на обычных скоростях наблюдается противоположный эффект. В
Другими словами, регулирование скорости двигателя хуже, когда сопротивление
добавляется в цепь ротора на более высокой скорости. По этой причине сопротивление
регулятора скорости снимается, когда двигатель достигает своей номинальной скорости.
илл. 7 показаны скоростные характеристики асинхронного двигателя с фазным ротором.
Обратите внимание, что кривая скоростной характеристики получается, когда все сопротивления
вырезан из регулятора скорости указывает на относительно хорошую регулировку скорости.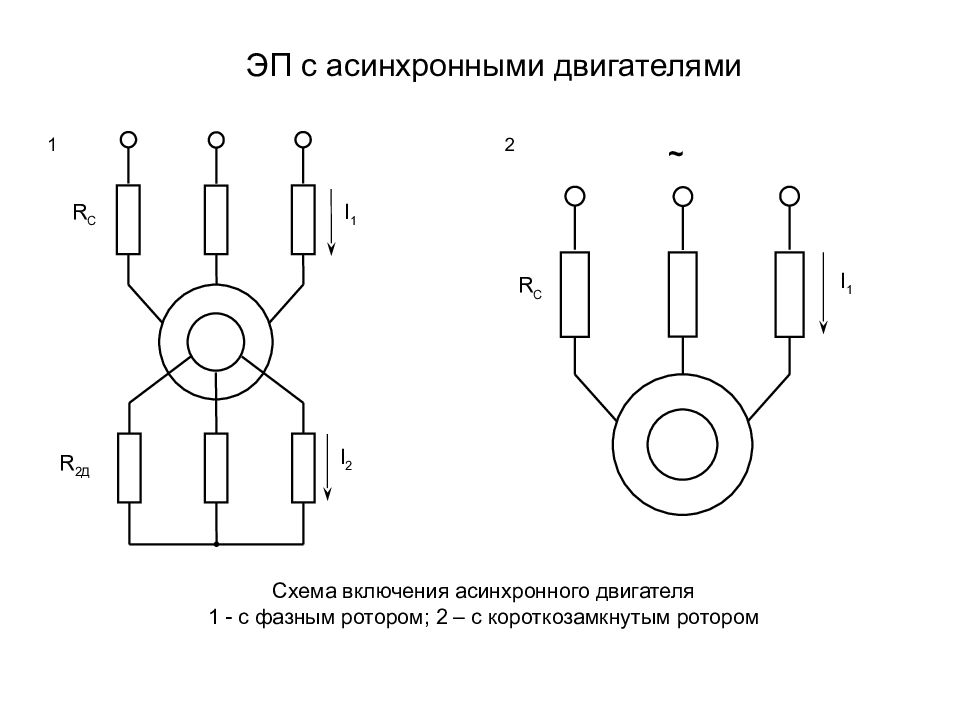
Вторая скоростная характеристика, полученная, когда все сопротивления
вставлен в регулятор скорости, имеет заметное падение скорости, поскольку
нагрузка увеличивается. Это указывает на плохую регулировку скорости.
Коэффициент мощности
Коэффициент мощности асинхронного двигателя с фазным ротором на холостом ходу настолько низок
как отставание от 15 до 20 процентов. Однако при приложении нагрузки к двигателю
коэффициент мощности улучшается и увеличивается до 85 процентов до 90-процентного отставания
при номинальной нагрузке.
илл. 8 представляет собой график характеристик коэффициента мощности фазного ротора.
асинхронный двигатель от холостого хода до полной нагрузки. Низкое отставание
коэффициент мощности на холостом ходу обусловлен тем, что намагничивающая составляющая
тока нагрузки составляет такую большую часть общего тока двигателя. Намагничивающий
составляющая тока нагрузки намагничивает железо, вызывая взаимодействие между
ротор и статор взаимной индуктивностью.
По мере увеличения механической нагрузки на двигатель синфазная составляющая
увеличения тока для удовлетворения повышенных требований к мощности. Намагничивающий
однако составляющая тока остается неизменной. Так как общий двигатель
ток теперь находится почти в фазе с линейным напряжением,
улучшение коэффициента мощности.
ил. 7 Кривые скоростных характеристик двигателя с фазным ротором
Операционная эффективность
Оба асинхронных двигателя с фазным ротором с отключенным сопротивлением
регулятора скорости и асинхронного двигателя с короткозамкнутым ротором показывают почти
одинаковые показатели эффективности. Однако, когда двигатель должен работать на
медленных скоростях со всем отключением сопротивления в цепи ротора, эффективность
двигателя плохо из-за потери мощности в ваттах на резисторах
регулятора скорости.
илл. 9 иллюстрирует эффективность индукционного ротора с фазным ротором.
мотор. Верхняя кривая, показывающая самые высокие результаты операционной эффективности
когда регулятор скорости находится в быстром положении и нет сопротивления
включен в цепь ротора. Нижняя кривая показывает более низкую рабочую
эффективность. Это происходит, когда регулятор скорости находится в медленном положении и все сопротивление регулятора включено в цепь ротора.
ил. 8 Коэффициент мощности асинхронного двигателя с фазным ротором
ил. 9 Кривые КПД асинхронного двигателя с фазным ротором
Реверсивное вращение
Направление вращения асинхронного двигателя с фазным ротором изменено на противоположное
меняя местами соединения любых двух из трех выводов линии, рис.
10. Эта процедура идентична процедуре, используемой для реверсирования
направление вращения асинхронного двигателя с короткозамкнутым ротором.
ил. 10 Изменения, необходимые для изменения направления вращения
двигателя с фазным ротором
Электрик никогда не должен пытаться изменить направление вращения
асинхронного двигателя с фазным ротором, поменяв местами любой из выводов, питающих
от контактных колец к регулятору скорости. Изменения в этих соединениях
Изменения в этих соединениях
не изменит направление вращения двигателя.
ОБЗОР
Двигатель с фазным ротором сегодня редко устанавливается как новый двигатель, но
по-прежнему используется ряд двигателей. Можно использовать двигатель с фазным ротором.
для переменной скорости с вставкой вторичных резисторов. Старт
ток и пусковой момент двигателя были основными соображениями
при выборе двигателя с фазным ротором для установки. Есть еще
много ссылок на двигатель с фазным ротором, используемый в National Electrical
Код.
ВИКТОРИНА
Дайте полные ответы на следующие вопросы.
1. Перечислите основные части асинхронного двигателя с фазным ротором.
2. Перечислите две причины, по которым асинхронный двигатель с фазным ротором запускается с
все сопротивление вставлено в регулятор скорости.
3. Трехфазный асинхронный двигатель с фазным ротором имеет шесть полюсов и рассчитан на
на 60 герц.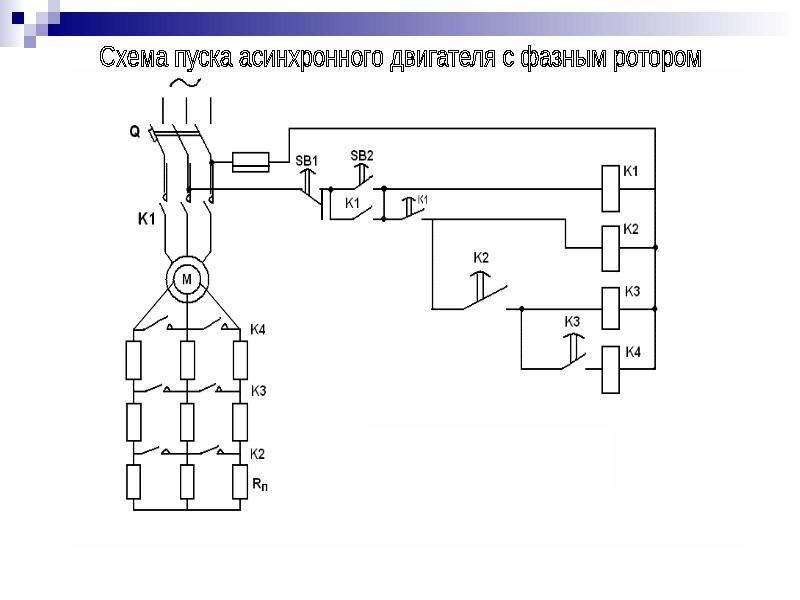 Скорость при полной нагрузке этого двигателя при всем сопротивлении
Скорость при полной нагрузке этого двигателя при всем сопротивлении
отключение регулятора скорости составляет 1120 об/мин. Что такое синхронный
скорость поля, создаваемого обмотками статора?
4. Определите процентное скольжение при номинальной нагрузке для рассматриваемого двигателя.
3.
5. Почему вместо двигателя с короткозамкнутым ротором используется асинхронный двигатель с фазным ротором?
асинхронный двигатель для некоторых промышленных применений?
6. Почему КПД асинхронного двигателя с фазным ротором в процентах низкий
при работе при номинальной нагрузке со всем сопротивлением, включенным в
регулятор скорости?
7. Что нужно сделать, чтобы изменить направление вращения фазного ротора
Индукционный двигатель?
8. Почему коэффициент мощности асинхронного двигателя с фазным ротором невелик?
нагрузка?
9. Перечислите два фактора, влияющих на синхронную скорость вращения
магнитное поле, создаваемое током в обмотках статора.
B. Выберите правильный ответ для каждого из следующих утверждений и поставьте соответствующую букву в отведенном месте.
10. Скорость двигателя с фазным ротором увеличивается на:
а. включение сопротивления в первичную цепь.
б. включение сопротивления во вторичную цепь.
с. уменьшение сопротивления во вторичной цепи.
д. уменьшение сопротивления в первичной цепи.
11. Пусковой ток асинхронного двигателя с фазным ротором ограничивается:
а. уменьшение сопротивления в первичной цепи.
б. уменьшение сопротивления во вторичной цепи.
с. включение сопротивления в первичную цепь.
д. включение сопротивления во вторичную цепь.
12. Изменение направления вращения двигателя с фазным ротором путем замены
любые два из трех:
а. L1, L2, L3 в. М1, М2, М3
б. Т1, Т2, Т3 д. все из этого.
13. Двигатели с фазным ротором могут использоваться с:
а. ручные регуляторы скорости.
ручные регуляторы скорости.
б. автоматические регуляторы скорости.
с. выбор кнопки.
д. все из этого.
14. КПД двигателя с фазным ротором при полной нагрузке лучше всего, когда:
а. все сопротивление отключено от вторичной цепи.
б. все сопротивление отключается во вторичной цепи.
с. он работает медленно.
д. он работает на средней скорости.
15. Основным преимуществом многофазного двигателя с фазным ротором является то, что он a.
имеет низкий пусковой момент. в. быстро обратится вспять.
б. имеет широкий диапазон скоростей. д. имеет низкий диапазон скоростей.
16. Двигатель с фазным ротором назван так потому, что:
а. ротор обмотан проволокой.
б. статор обмотан проволокой.
с. контроллер обмотан проводом.
д. все из этого.
17. Намагничивающая составляющая тока нагрузки .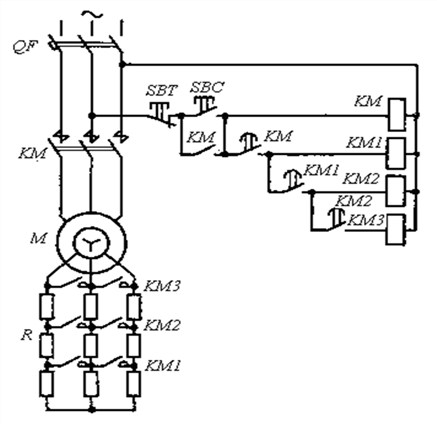 ..
..
а. является небольшой частью полного тока двигателя на холостом ходу.
б. намагничивает железо, вызывая взаимодействие между ротором и
статор.
с. составляет большую часть полного тока двигателя при полной нагрузке.
д. не зависит от коэффициента мощности.
Мотор с раневым ротором: что это такое?
Вы здесь: Домашняя страница / Часто задаваемые вопросы + основы / Что такое двигатель с фазным ротором?
Даниэль Коллинз Оставить комментарий
Двигатель с фазным ротором представляет собой вариант трехфазного асинхронного двигателя, предназначенный для обеспечения высокого пускового момента для нагрузок с высокой инерцией при очень низком токе.
Двигатели с фазным ротором также называются «двигателями с контактными кольцами».
Статор двигателя с фазным ротором такой же, как у типичного асинхронного двигателя, но ротор имеет трехфазную обмотку, причем каждый из выводов обмотки соединен с отдельными контактными кольцами. Напротив, традиционный асинхронный двигатель (также известный как «двигатель с короткозамкнутым ротором») имеет обмотки, которые постоянно замыкаются накоротко концевым кольцом.
Напротив, традиционный асинхронный двигатель (также известный как «двигатель с короткозамкнутым ротором») имеет обмотки, которые постоянно замыкаются накоротко концевым кольцом.
Токосъемные кольца на двигателе с фазным ротором содержат щетки, образующие внешнюю вторичную цепь, в которую может быть введен импеданс (сопротивление). Во время пуска это сопротивление включается последовательно с обмотками ротора. Это дополнительное сопротивление приводит к тому, что ток ротора больше совпадает по фазе с током статора, что увеличивает развиваемый крутящий момент. Но добавленное сопротивление также уменьшает ток во вторичной цепи, поэтому очень высокий пусковой момент может быть получен при низком пусковом токе .
Ротор двигателя с фазным ротором имеет трехфазные обмотки, соединенные с контактными кольцами.
Изображение предоставлено TMEIC
Традиционным асинхронным двигателям с короткозамкнутым ротором при запуске может потребоваться от 400 до более 1000 процентов тока полной нагрузки.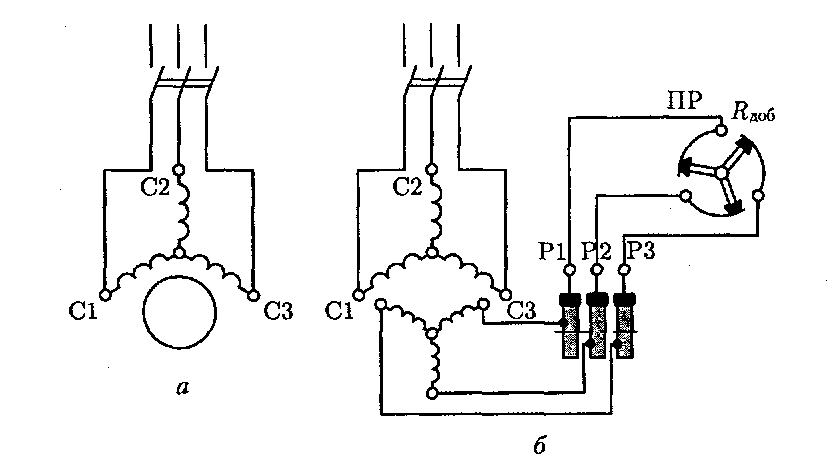
Если полное сопротивление вводится во вторичную цепь при работающем двигателе, ток ротора уменьшается, а скорость двигателя уменьшается. Но по мере уменьшения скорости двигателя в обмотках ротора индуцируется большее напряжение, и вырабатывается больший ток для создания необходимого крутящего момента при этой уменьшенной скорости.
Постепенное уменьшение сопротивления позволяет двигателю выйти на нормальную рабочую скорость, обеспечивая плавное ускорение для нагрузки. Поддерживая некоторое сопротивление во вторичной цепи, можно регулировать скорость до определенного момента. Но этот метод регулирования скорости теряет свою эффективность по мере увеличения скорости – примерно до 50 процентов от номинальной скорости при полной нагрузке. Как только сопротивление во вторичной цепи полностью закорочено, двигатель ведет себя электрически как традиционный двигатель с короткозамкнутым ротором.
Токосъемные кольца образуют вторичную внешнюю цепь. Добавление сопротивления в эту цепь изменяет кривую скорости вращения двигателя.