Содержание
Асинхронный двигатель с фазным ротором: устройство, принцип работы (видео)
Асинхронный двигатель с фазным ротором имеет очень обширную область обслуживания. АД (асинхронный двигатель) чаще применяется в управлении двигателями большой мощности. Обслуживание и управление приводов мельниц, станков, насосов, кранов, дымососа, дробилок. Асинхронный двигатель с массивным ротором даёт возможность подключения множества технических механизмов.
Характеристика асинхронного двигателя
Преимущества использования:
- Запуск двигателя с нагрузкой, подключение к валу благодаря созданию большого момента вращения. Это обеспечивает обслуживание асинхронных двигателей с фазовым элементом любой мощности.
- Возможность постоянной скорости вращения большой или маленькой нагрузки
- Регулирование автоматического пуска.
- Работа даже при перегрузке тока напряжения.
- Простота использования.
- Невысокая стоимость.
- Надёжность применения.
Недостатки применения
- Использование резисторов увеличивается стоимость, а работа двигателя усложняется,
- Большие размеры,
- Значение КПД меньше, чем короткозамкнутых роторов,
- Трудное управление скоростью вращения,
- Регулярный капитальный ремонт .


Схема подключения
При подключении к току начинают работать реле времени. Контакты размыкаются. При нажатии тумблера происходит пуск.
Чтобы подключить АД нужно правильно обозначить концы и начала обмоток фазы.
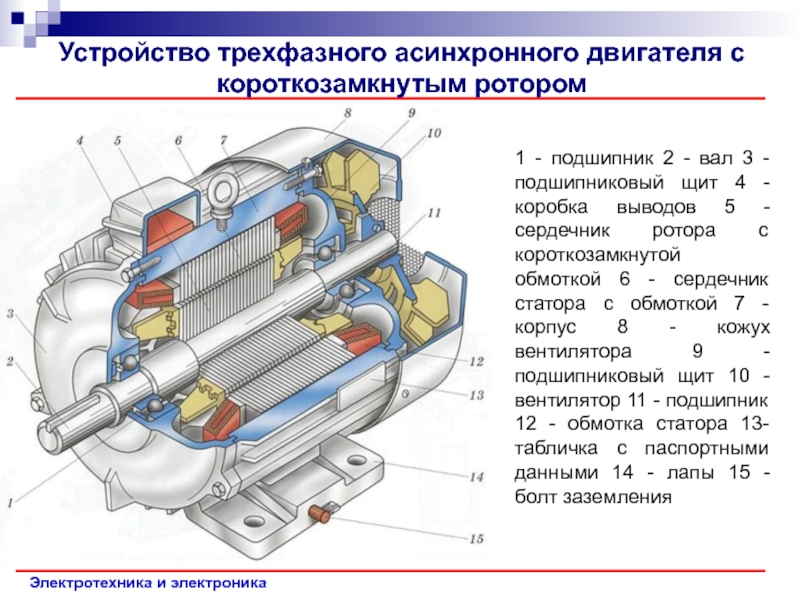
Устройство двигателя
Главными постоянными являются статор и ротор. Статор представляет собой цилиндр, состав –листы электротехнической стали, в цилиндр уложена трёхфазная обмотка. Она состоит из обмоточной проволоки. Которые соединены между собой в виде звезды или треугольника в зависимости от напряжения.
Ротор – основная вращающаяся часть двигателей. Он в зависимости от расположения может быть внешним, внутренним. Данный элемент состоит из стальных листов. Пазы сердечника наполнены алюминием, который имеет стержни, содержащие торцевые кольца. Они могут быть латунными или стальными, каждое из них изолировано слоем лака. Между трёхфазным статором и ротором образуется зазор. Регулирование размер зазора от 0,30 –0,34 мм в устройствах с небольшим напряжением, 1,0–1,6 мм в устройствах с большим постоянным электрическим напряжением. Конструкция имеет название беличья клетка. Для мощных двигателей используется медь в сердечнике. Контактор начинает действие, двигатель заводится.
Конструкция имеет название беличья клетка. Для мощных двигателей используется медь в сердечнике. Контактор начинает действие, двигатель заводится.
Существует добавочный резистор в цепи обмотки вращающей части машины, крепится с помощью металлографитных щеток. Щетки обычно используются две, расположены на щеткодержателе. В приводах кранах и центрифугах для регулирования роботы применяется конический подвижный ротор. Асинхронные двигатели с фазным ротором незаменимы при технических требованиях мощного пускового момента. Это могут быть такие механизмы, как кран, мельница, лифт.
Схема переключения электрической цепи со звезды на треугольник
Принцип работы
В основе АД лежит вращение поля магнитов. В область обмотки трёхфазного статора поступает ток, а в фазах возникает поток магнитов, изменяемый в зависимости от скорости и частоты постоянной электрической мощности. При статорном вращении возникает электродвижущая сила.
При статорном вращении возникает электродвижущая сила.
В роторную обмотку подходит напряжение, которое совместно с постоянным магнитным потоком статора образует пуск. Он стремится направить ротор по магнитному вращению статора и при достижении превышения момента торможения, приводит к скольжению. Оно выражает отношение между частотами статорного силового поля магнитов и скоростью роторного вращения.
Чертеж режима кз
При балансе между моментами электромагнита и торможения, перемена значений остановится. Особенность эксплуатации АД – сольватация кругового движения силового поля статора и им наводящих токов в роторе. Момент вращения возникает лишь при разнице частот круговых движений магнитных полей.
Машины различают синхронные, асинхронные. Разница механизмов в их обмотке. Она образует магнитное поле.
Неподвижность ротора и замыкание обмотки приводит к короткому замыканию (кз).
Расчёт числа повторений
Возьмём m1 – процесс повторения постоянного поля магнитов и ротора. Система фазы переменного тока образуют вращение поля магнитов.
Система фазы переменного тока образуют вращение поля магнитов.
Данные расчета считаются по формуле:
m1=60f1/p
f1– частота электричества$
p – количество полюсных пар каждой обмотки статора.
m2 – процесс повторения вращения ротора. Имея различное количество одновременных повторений, данная скорость частоты будет асинхронной. Определение расчёта частоты проводится по соотношению между данными:
(m2≠m1)
Асинхронный электродвигатель работает только при асинхронной частоте.
(m2<,m1)
При одновременном вращении статора и ротора, расчет скольжения будет равняться нулю.
Двухроторный АД используется для привода разных механизмов. Различие двухроторного двигателя заключается присутствием в конструкции двух роторов. Второй ротор выполняет функцию вспомогательную, может вращаться с другой скоростью. Вспомогательный ротор представляет собой внутренний хомут для замыкания постоянного потока магнитов, охлаждения электродвигателя. Недостаток двухмоторного асинхронного двигателя в низком КПД от использования ферромагнитного вспомогательного ротора.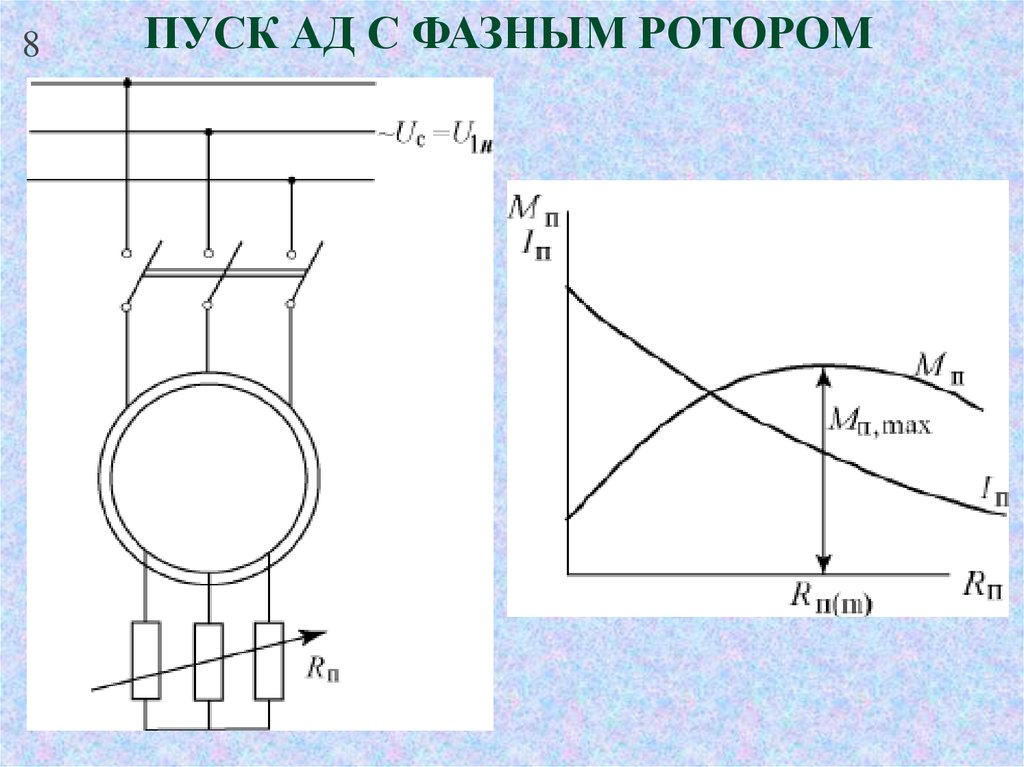
В ходе исследования двухроторных машин достигаются близкие данные скоростик желаемым, когда вспомогательный ротор имеет максимальные вентиляционные зазоры. Полый ротор установлен на ступице, его вал расположен внутри цилиндра. При вращении вспомогательного ротора вентиляция работает по принципу центробежного вентилятора. Для увеличения пускового момента и большей электрической нагрузки полый ротор должен регулироваться, перемещаясь вдоль вала, с установленным штифтом, конец чего входит в паз ступицы ротора.
Данные для расчета:
Реостатный пуск
Часто для включения двигателя безмощных пусковых моментов оказывают нужное действие реостаты. Схема реостатного способа:
Главной характеристикой метода является присоединение двигателя при пуске к реостатам. Реостаты разрываются (на чертеже К1), на них идет частично электрический ток. Что дает возможность уменьшить пусковые токи. Пусковой момент тоже снижается. Преимущество реостатного способа заключается в снижении нагрузки на механическую часть и нехватку напряжения.
Пусковой момент тоже снижается. Преимущество реостатного способа заключается в снижении нагрузки на механическую часть и нехватку напряжения.
Ремонт и характеристики неисправностей
Причиной ремонта могут служить внешние и внутренние причины.
Внешние причины ремонта:
- обрыв провода или нарушение соединений с электрическим током,
- сгорание предохранителей,
- понижение или повышения напряжения,
- перегруженность АД,
- неравномерная вентиляция в зазоре.
Внутренняя поломка может возникнуть по механическим и электрическим причинам.
Механические причины ремонта:
- неправильное регулирование зазора подшипников,
- повреждение вала ротора,
- расшатывание щеткодержателей,
- возникновение глубоких выработок,
- истощение креплений и трещины.
Электрические причины ремонта:
- замыкания витков,
- поломка провода в обмотках,
- пробивание изоляции,
- пробой пайки проводов.

Данные причины – это далеко не полный список поломок.
Асинхронный двигатель – незаменимый и важный механизм, применяемый для обслуживания быта и различных отраслей промышленности. Для практического действия АД с фазным ротором необходимо знать техническую характеристику управления, использовать его по назначению и регулярно проводить ремонт при технических осмотрах. Тогда асинхронный двигатель станет практически вечной эксплуатации.
Асинхронные двигатели с фазным ротором и схемы управления
резисторы.Рис. 6.14.
Схема управления пуском и динамическим торможением асинхронного двигателя
Постоянный ток протекает по всем обмоткам статора или по части их, создает постоянное во времени магнитное поле. В обмотках вращающегося по инерции ротора будет наводиться ЭДС и потечет ток, который создаст свое неподвижное в пространстве магнитное поле. Взаимодействие тока ротора с результирующим магнитным полем АД приведет к появлению тормозного момента и остановке ротора.
Преобразуемая при этом механическая энергия движущихся частей в электрическую рассеивается в виде тепла.
Пуск двигателя осуществляется нажатием кнопки SB1 (см. рис. 6.14).
После чего срабатывает линейный контактор КМ, подключающий обмотки статора к трехфазному источнику питания. Замыкающий блок-контакт КМ в цепи реле времени КТ вызовет его срабатывание. В результате чего контакты этого реле замкнутся в цепи контактора торможения КМ1, но этот контактор не сработает, так как перед этим произойдет размыкание блок-контакта КМ.
Нажатием кнопки SB3 производится остановка АД. Катушка линейного контактора теряет питание и контакты КМ в цепи обмоток статора размыкаются, отключая двигатель от сети переменного тока.
Одновременно с этим замыкается размыкающий блок-контакт КМ в цепи катушки контактора торможения КМ1; последний включается и подает в обмотки статора постоянный ток от выпрямителя V через резистор RT и замыкающий блок контакт КМ1. АД переходит в режим динамического торможения.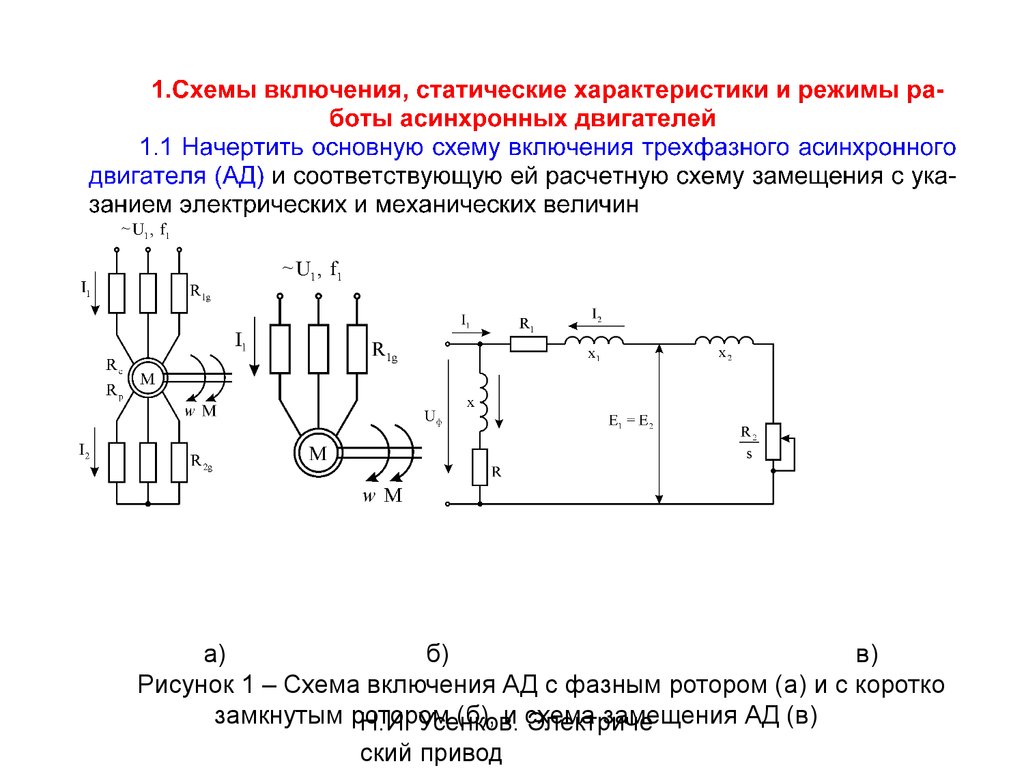
С потерей питания катушки КМ, также размыкается замыкающий блок-контакт КМ в цепи реле времени КТ. Это реле, потеряв питание, начинает отсчет выдержки времени. Через промежуток времени, соответствующий останову двигателя, реле КТ размыкает свои контакты в цепи катушки контактора КМ1.
уст.I
Обмотка статора отключается от источника постоянного тока и схема переходит в свое первоначальное состояние.
Задержкой срабатывания реле КТ и величиной регулируемого резистора Rт устанавливают время динамического торможения.
Схема управления реверсивным асинхронным двигателем с фазным ротором. Частоту вращения ротора асинхронного электродвигателя с фазным ротором можно регулировать, изменяя величину сопротивления в роторной цепи (см. подразд. 5.2).
Управлять такими электродвигателями возможно с помощью силовых и магнитных контроллеров (рис. 6.15). В настоящее время в подъемнотранспортных механизмах используются магнитные контроллеры, относящиеся к аппаратам дистанционного управления.
Рис. 6. 15. Схема управления трехфазным асинхронным двигателем с фазным
ротором: а) силовая схема; б) схема управления
В первом положении командоконтроллера “Вперед” замыкается контакт S1.1, подавая питание на катушку. Контактор КМ1 подключает обмотки статора двигателя и тормозной электромагнит YB1 к сети. В цепь ротора электродвигателя при этом включено полное сопротивление пускорегулирующего реостата, и двигатель разгоняется по характеристике I (см. рис. 5.4) до установившейся частоты вращения n при заданном моменте сопротивления Мс.
Во втором положении замыкается контакт S1.3 командоконтроллера и включается контактор КМ3, который закорачивает часть сопротивлений
реостата. Двигатель переходит на работу по характеристике II, разгоняется до частоты вращения nуст.II.
В третьем положении контроллера включается контактор КМ4, который закорачивает выводы обмотки ротора, и двигатель работает на естественной характеристике III с частотой вращения nуст.III.
Для выключения двигателя необходимо контроллер перевести в нулевое положение. Вращение “Назад” осуществляется постановкой рукоятки магнитного контроллера на позицию 1 “Назад”, при этом включается контактор КМ2. Происходит смена чередования фаз в обмотках статора и начинается обратное вращение ротора при полном включенном пускорегулирующем резисторе роторной цепи. Дальнейший процесс управления аналогичен описанному выше.
Особенностью работы двигателей подъемно-грузовых лебедок является спуск груза. В этом случае груз не только преодолевает силы трения, но и стремится ускорить вращение двигателя в направлении спуска. Скорость двигателя очень быстро достигает синхронной, после чего двигатель начинает работать как генератор под действием силы тяжести груза, т.е., тормозя механизм. Если сопротивление в цепи ротора двигателя полностью закороченно, то скорость опускания груза на 5–10 % больше синхронной частоты вращения. Увеличение роторного сопротивления приводит к увеличению скорости спуска (а не к уменьшению, как это бывает при подъеме).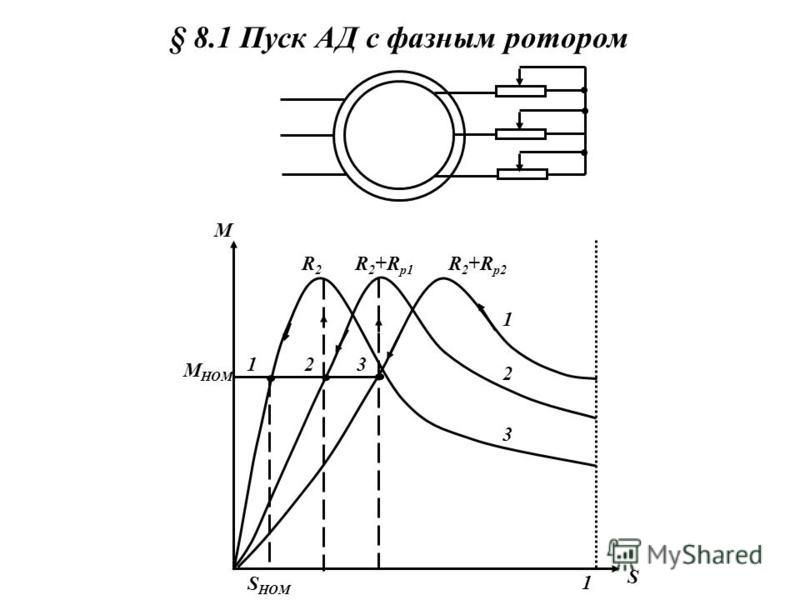
Схема автоматического пуска и торможения противовключением асинхронного двигателя с фазным ротором. Пуск двигателя совершается нажатием кнопки SB1 (вперед) или SB2 (назад), тем самым подается питание на катушку контактора КМ1 (или КМ2). Рассмотрим работу схемы при срабатывании контактора КМ1 (рис. 6.16).
Обмотки статора подключаются к сети, включается блокировочное реле РБ. Катушка РП не притягивает свой якорь из-за малой ЭДС ротора и размыкающий контакт РП замкнут. Затем замыкающим контактом РБ собирается цепь катушки контактора КП, шунтирующего своими контактами ступень сопротивлений Rn в цепи ротора.
Рис. 6.16.
Схема торможения противовключением асинхронного двигателя с фазным ротором: а) силовая схема; б) схема управления
С помощью механического маятникового реле времени РВ, пристраиваемого к контактору КП, осуществляется выдержка времени, необходимая для некоторого разгона двигателя, после чего включается контактор КУ, шунтирующий сопротивления Rg в цепи ротора, и двигатель выводится на естественную характеристику.
Таким образом, пуск двигателя совершается в одну ступень с резистором в роторе Rg. Ступень резистора Rn служит для ограничения тока при торможении.
Если требуется реверсирование двигателя, то необходимо нажать на кнопку противоположного направления вращения (в нашем примере на кнопку SB2), не воздействуя на кнопку SB3 (стоп). При этом отключаются контакторы КМ1 и КП. Последний – из-за размыкания контакторов КМ1 и РБ. Как только замкнется размыкающий контакт КМ1 в цепи катушки контактора КМ2, он включится, и двигатель переведется в режим торможения противовключением.
В приведенной на рис. 6.16 схеме реализуется управление торможением в функции угловой скорости (по величине ЭДС ротора, которая пропорциональна скольжению). Реле напряжения РП через выпрямитель V подключается к выводам обмотки ротора. Реле настраивается с помощью резистора Rр так, что при начале торможения, когда направления вращений магнитного поля статора и ротора противоположны (S=2), оно срабатывает, а при угловой скорости, близкой к нулю (S=1), когда напряжение на его катушке снижается почти вдвое, реле отпускает свой якорь. При пуске в обратную сторону реле РП не срабатывает, так как ЭДС ротора становится еще меньше, достигая нулевого значения при S=0.
При пуске в обратную сторону реле РП не срабатывает, так как ЭДС ротора становится еще меньше, достигая нулевого значения при S=0.
После включения контактора КМ2, когда произойдет реверсирование магнитного поля статора, срабатывает реле РП и своим размыкающим
контактором разорвет цепь катушки контактора КП, что обеспечит на период торможения введение всех резисторов в цепь ротора (Rg и Rn). Блокировочное реле РБ служит для создания временного разрыва в цепи катушки контактора КП, оно отключается одновременно с контактором КМ1, а включается только после замыкания контактов контактора КМ2. Когда контакты РБ сомкнутся, уже успеет сработать реле РП.
По окончании процесса торможения контакт РП закроется и контактор КП зашунтирует ступень сопротивления Rn. Затем произойдёт изменение направления вращения ротора, то есть пуск в противоположном направлении (назад).
Если остановку двигателя производить кнопкой SB3, то обмотки статора отключатся от сети, но электрического торможения не произойдет, двигатель остановится под действием статического момента сопротивления на валу.
Схема пуска асинхронного двигателя с фазным ротором в функции времени. Упрощенная принципиальная схема пуска асинхронного двигателя с фазным ротором в функции времени [8] представлена на рис. 6.17. Пуск двигателя по этой схеме осуществляется в две пусковые ступени, при этом для большей надежности цепи управления подключены к сети постоянного тока.
Рис. 6.17. Упрощенная
принципиальная схема пуска асинхронного двигателя с фазным ротором в функции времени: а) силовая схема; б) схема управления
При подключении цепей управления к источнику напряжения сразу включаются реле РУ1 и РУ2 через размыкающие блок-контакты КМ и КУ1. Реле без выдержки времени отключают катушки контакторов КУ1 и КУ2 от источника питания. Затем после нажатия кнопки SB1 и включения контактора КМ статор двигателя подключается к сети, а роторная цепь его замкнута на полностью включенные резисторы R1 и R2, так как силовые контакты контакторов КУ1 и КУ2 разомкнуты; начинается пуск АД.
Размыкающий контакт КМ в цепи катушки реле времени РУ размыкается, оно обесточивается, начинает отсчитывать выдержку времени при пуске на первой пусковой ступени. После выдержки времени реле РУ1 своим контактом замыкает цепь питания катушки контактора КУ1. Этот контактор зашунтирует пусковой резистор R1 своими силовыми контактами и снимает питание с реле времени РУ2 вспомогательным контактом КУ1. Реле РУ2 начинает отсчитывать выдержку времени, по окончании которой размыкающий контакт РУ2 замыкается, подключая к источнику питания катушку КУ2, в результате чего зашунтируется вторая ступень пускового сопротивления R2 и АД будет выведен на естественную характеристику.
После выдержки времени реле РУ1 своим контактом замыкает цепь питания катушки контактора КУ1. Этот контактор зашунтирует пусковой резистор R1 своими силовыми контактами и снимает питание с реле времени РУ2 вспомогательным контактом КУ1. Реле РУ2 начинает отсчитывать выдержку времени, по окончании которой размыкающий контакт РУ2 замыкается, подключая к источнику питания катушку КУ2, в результате чего зашунтируется вторая ступень пускового сопротивления R2 и АД будет выведен на естественную характеристику.
Схема пуска асинхронного двигателя с фазным ротором в функции тока. Схема, приведенная на рис. 6.18, обеспечивает пуск асинхронного двигателя с фазным ротором в одну ступень в функции тока и динамическое торможение в функции скорости и включает оборудование:
•электромагнитные контакторы КМ1, КМ2, КМ3;
•реле тока КА;
•реле контроля скорости SR;
•реле напряжения KV;
•понижающий трансформатор Т;
•выпрямитель VD;
•предохранители FA1, FA2;
•тепловые реле КК1, КК2.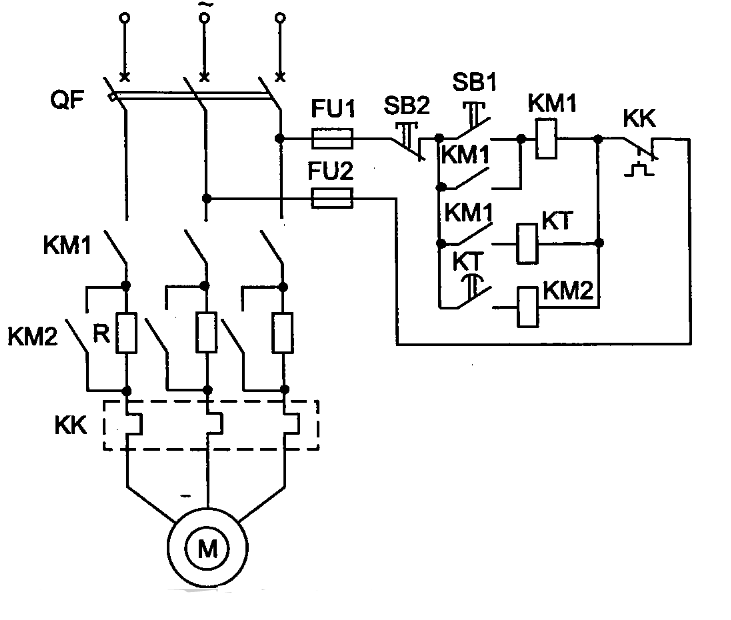
Реле контроля скорости SR размыкает свои контакты в цепи катушки электромагнитного тормоза КМ3, когда частота вращения уменьшается до значения, близкого к нулю, а замыкает, когда начнется разгон АД.
После включения автоматического выключателя нажимается кнопка пуска SB1. По известной схеме включается контактор КМ1, через силовые контакты которого статор АД подключается к сети. Бросок тока в цепи ротора, когда еще не замкнуты контакты КМ2, вызовет включение реле тока КА, последнее разорвет свои контакты в цепи катушки КM2. Таким образом, разбег начинается с пусковым сопротивлением R2g в цепи ротора.
Рис. 6.18. Схема пуска АД в
одну ступень в функции тока и динамического торможения в функции скорости
Вспомогательные контакты КМ1 замыкают цепь катушки промежуточного реле напряжения KV, шунтируют кнопку SB1, размыкают цепь контактора торможения КМ3. Несмотря на то, что реле KV включается, это не приводит к включению контактора КМ2, так как до этого в цепи разомкнулся контакт реле КА.
Трогание с места и вращение ротора вызывает замыкание контакта реле скорости SR в цепи тормозного контактора КМ3, но и этот контактор не сработает, так как до этого разомкнулся контакт КМ1. По мере разгона двигателя ток в цепи ротора уменьшается, и реле тока КА выключается, замыкая цепь контактора КМ2. Этот контактор зашунтирует резисторы R2g в цепи ротора, АД выйдет на естественную характеристику.
Для перевода в тормозной режим нажимается кнопка SB3. Контактор КМ1 теряет питание и отключается статор АД от сети, но включается тормозной контактор КМ3. Контактор КМ3 замыкает цепь питания катушек обмотки статора постоянным током от выпрямителя VD, подключенного к трансформатору Т. Тем самым осуществляется перевод АД в режим динамического торможения.
Одновременно с этим потеряет питание аппарат KV, а следовательно и КМ2, что приведет к вводу в цепь ротора резистора R2g. Двигатель начинает тормозить.
При скорости двигателя, близкой к нулю, реле контроля скорости SR размыкает свой контакт в цепи катушки контактора КМ3. Он отключается и прекращает торможение АД. Схема приходит в исходное положение и готова к последующей работе.
Он отключается и прекращает торможение АД. Схема приходит в исходное положение и готова к последующей работе.
Принцип действия схемы не изменяется, если катушка реле тока включается в фазу статора, а не ротора при одноступенчатом разгоне двигателя.
Схема панели управления асинхронным двигателем типа ПДУ 6220.
Панель типа ПДУ 6220 входит в состав нормализованной серии панелей управления АД с фазным и короткозамкнутым роторами и обеспечивает пуск в две ступени и динамическое торможение в функции времени (рис. 6.19).
Рис. 6.19. Схема панели
управления асинхронного двигателя типа ПДУ 6220
При подаче на схему напряжений постоянного тока 220 В и переменного 380 В тока (замыкание рубильников Q1, Q2 и автомата QF) происходит включение реле времени КТ1, чем двигатель подготавливается к пуску с полным пусковым резистором в цепи ротора.
Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FA1–FA3 не включены, включается реле защиты KV от понижения питающего напряжения и готовит схему к работе замыканием своего блок-контактора KV.
Пуск двигателя осуществляется по любой из двух искусственных характеристик или по естественной характеристике, для чего рукоятка SA должна устанавливаться соответственно в положение 1,2 или 3. При переводе рукоятки в любое из указанных положений SA включается линейный контактор КМ2, подключающий АД к сети, контактор управления тормозом КМ5, подключающий к сети катушку YA электромагнитного тормоза,
который при этом растормаживает двигатель, и реле времени KT3, управляющее процессором динамического торможения.
Перевод контроллера SA в положение 2 или 3 позволяет включить контакторы ускорения КМ3 и КМ4, скорость двигателя увеличивается.
Торможение АД происходит за счет перевода рукоятки SA в нулевое положение. Тогда отключаются контакторы КМ2 и КМ5, а включается контактор динамического торможения КМ1, который подключает АД к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения АД, который закончится после отсчета реле своей выдержки времени, соответствующей времени торможения.
Схема управления тиристорным приводом переменного тока. Схема управления тиристорным приводом переменного трехфазного тока содержит тиристорный преобразователь, который включается в цепь статорных обмоток двигателя и осуществляет фазовое регулирование подводимого к двигателю напряжения (рис. 6.20).
Последовательно со статорными обмотками двигателя встречнопараллельно через быстродействующие предохранители FU включены три пары тиристоров преобразователя U. Регулированием угла открывания тиристоров с помощью системы управления СУ изменяется напряжение, подводимое к двигателю, а следовательно, и его момент.
Рис. 6.20. Схема управления асинхронного двигателя с тиристорным
преобразователем: QF – автоматический выключатель; В – датчик тока; U – тиристорный преобразователь; FU – предохранитель; KK – командоконтроллер; СУ-
система управления тиристорным преобразователем; BR – тахогенератор; КМ – электромагнитные контакторы
В результате получается ряд мягких механических характеристик, обеспечивающих плавный пуск и разгон механизма.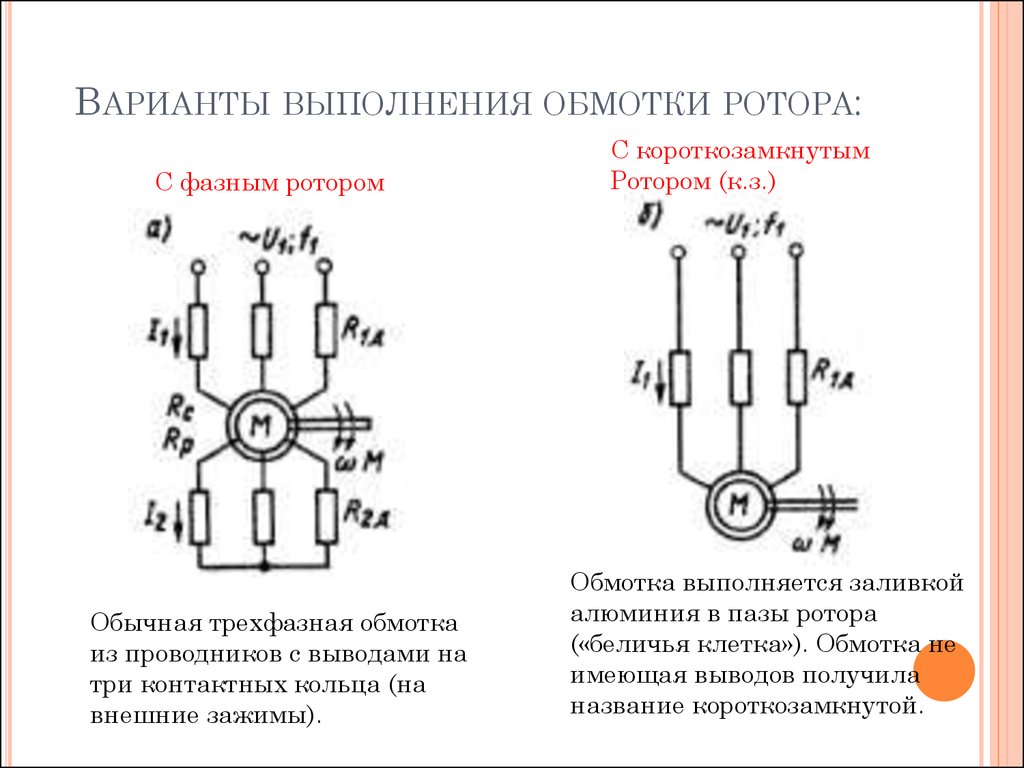 При использовании обратной связи по частоте вращения, осуществляемой с помощью тахогенератора BR, жесткость механических характеристик увеличивается, что позволяет получить устойчивые промежуточные и низкую посадочную скорости.
При использовании обратной связи по частоте вращения, осуществляемой с помощью тахогенератора BR, жесткость механических характеристик увеличивается, что позволяет получить устойчивые промежуточные и низкую посадочную скорости.
Схемой предусмотрен контактный реверс двигателя контакторами КМ2 и КМ3. Переключение контакторов происходит при отсутствии тока в главной цепи под контролем датчика тока В. Бестоковая коммутация значительно повышает износостойкость аппаратуры.
С помощью тиристоров преобразователя может быть получено и регулируемое динамическое торможение, а также торможение противовключением. Управление углом открывания тиристоров может осуществляться ступенчато командоконтроллером КК, или плавно другим аппаратом, например, сельсином.
6.5. Крановые защитные панели
Крановые защитные панели применяют при контроллерном управлении двигателями крана. Конструкция защитной панели представляет собой металлический шкаф с установленной в нем аппаратурой. Шкаф закрыт дверью с замком.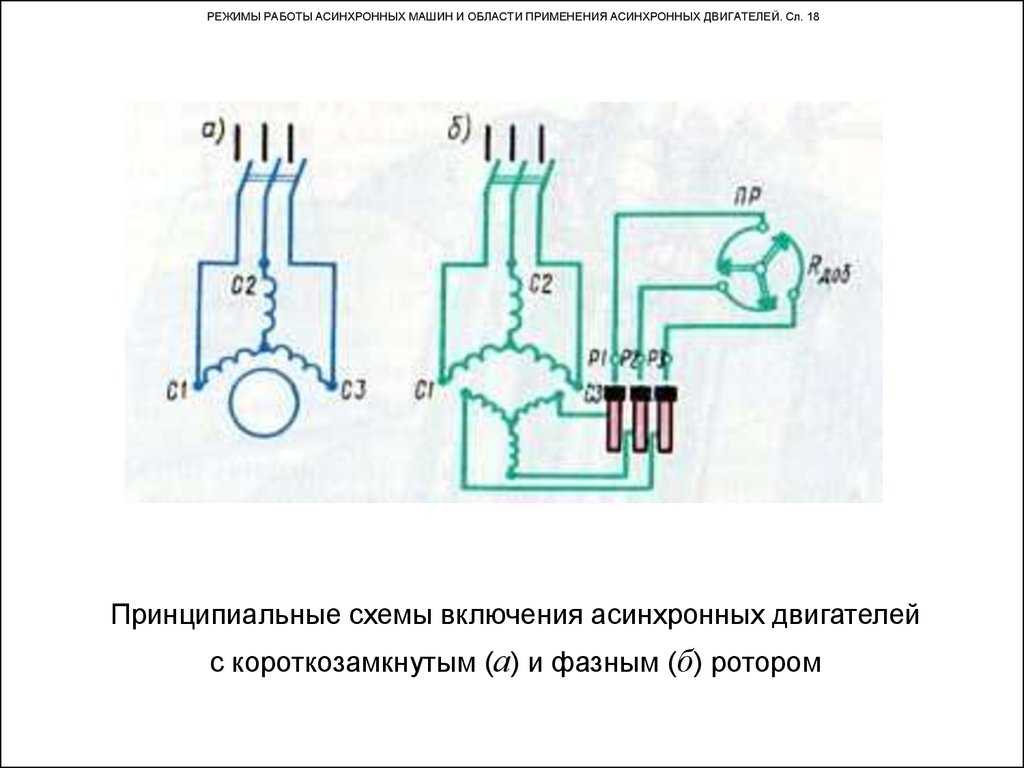 Второй замок заблокирован с главным рубильником, то есть дверь панели не откроется, пока не будет выключен рубильник, обесточивающий электрооборудование. Размещаются защитные панели обычно в кабине крана. На защитной панели установлена электроаппаратура, осуществляющая следующую защиту:
Второй замок заблокирован с главным рубильником, то есть дверь панели не откроется, пока не будет выключен рубильник, обесточивающий электрооборудование. Размещаются защитные панели обычно в кабине крана. На защитной панели установлена электроаппаратура, осуществляющая следующую защиту:
•максимальную от токов короткого замыкания и значительных (свыше 250 %) перегрузок крановых электродвигателей;
•нулевую, исключающую самозапуск двигателей после перерыва в электроснабжении;
•концевую, обеспечивающую автоматическое отключение электроприводов при переходе механизмами крана предельно допустимых положений.
Панели допускают подключение от трех до шести двигателей (рис. 6.21). В зависимости от числа защищаемых двигателей и соотношения их мощностей панели комплектуются соответствующим количеством блок-реле максимального тока, которые при срабатывании воздействуют на один, общий для группы из двух-четырех реле, контакт. Этим уменьшается число
Что такое асинхронный двигатель с расщепленной фазой? — его Приложения
Двигатель с расщепленной фазой также известен как пусковой двигатель с сопротивлением .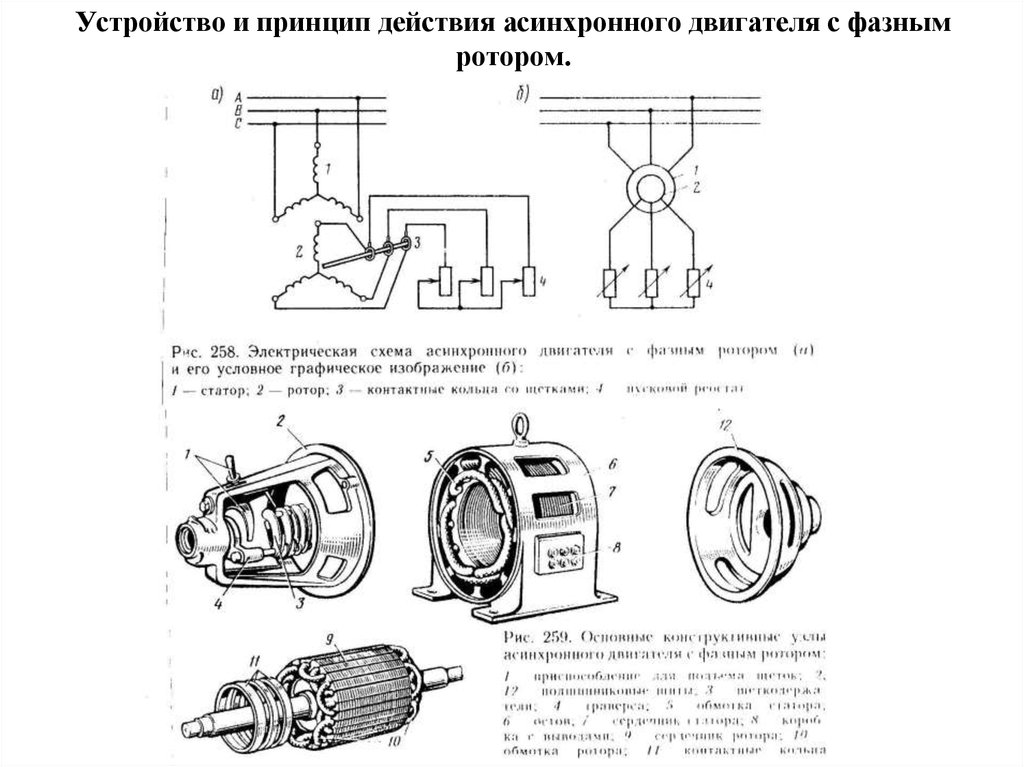 Он имеет ротор с одной клеткой, а его статор имеет две обмотки, известные как основная обмотка и пусковая обмотка. Обе обмотки смещены в пространстве на 90 градусов. Основная обмотка имеет очень низкое сопротивление и высокое индуктивное сопротивление, тогда как пусковая обмотка имеет высокое сопротивление и низкое индуктивное сопротивление. Схема подключения двигателя показана ниже:
Он имеет ротор с одной клеткой, а его статор имеет две обмотки, известные как основная обмотка и пусковая обмотка. Обе обмотки смещены в пространстве на 90 градусов. Основная обмотка имеет очень низкое сопротивление и высокое индуктивное сопротивление, тогда как пусковая обмотка имеет высокое сопротивление и низкое индуктивное сопротивление. Схема подключения двигателя показана ниже:
Резистор включен последовательно со вспомогательной обмоткой. Ток в двух обмотках неодинаков, вследствие чего вращающееся поле неравномерно. Следовательно, пусковой крутящий момент невелик, порядка 1,5-2 раза от заявленного рабочего крутящего момента. При пуске двигателя обе обмотки включаются параллельно.
Как только двигатель достигает скорости около 70 до 80 % синхронной скорости, пусковая обмотка автоматически отключается от сети питания. Если мощность двигателей составляет около 100 Вт или более, центробежный выключатель используется для отключения пусковой обмотки, а для двигателей меньшей мощности используется реле для отключения обмотки.
Реле включено последовательно с основной обмоткой. При пуске в цепи протекает сильный ток, и контакты реле замыкаются. Таким образом, пусковая обмотка находится в цепи, и по мере набора двигателем заданной скорости ток в реле начинает уменьшаться. Поэтому реле размыкается и отключает вспомогательную обмотку от питания, заставляя двигатель работать только от основной обмотки.
Векторная диаграмма асинхронного двигателя с расщепленной фазой показана ниже:
Ток в основной обмотке (I M ) отстает от напряжения питания V почти на угол 90 градусов. Ток во вспомогательной обмотке I А примерно совпадает по фазе с линейным напряжением. Таким образом, существует разница во времени между токами двух обмоток. Разность фаз по времени ϕ составляет не 90 градусов, а порядка 30 градусов. Этой разности фаз достаточно, чтобы создать вращающееся магнитное поле.
Характеристика скорости вращения двигателя с расщепленной фазой показан ниже:
Здесь n 0 — это точка, в которой срабатывает центробежный переключатель. Пусковой момент пускового двигателя с сопротивлением примерно в 1,5 раза превышает крутящий момент при полной нагрузке. Максимальный крутящий момент примерно в 2,5 раза превышает крутящий момент при полной нагрузке примерно на 75% синхронной скорости. Пусковой ток двигателя высок, примерно в 7-8 раз превышает значение полной нагрузки.
Пусковой момент пускового двигателя с сопротивлением примерно в 1,5 раза превышает крутящий момент при полной нагрузке. Максимальный крутящий момент примерно в 2,5 раза превышает крутящий момент при полной нагрузке примерно на 75% синхронной скорости. Пусковой ток двигателя высок, примерно в 7-8 раз превышает значение полной нагрузки.
Направление двигателя с резистивным пуском можно изменить, поменяв местами подключение к линии основной обмотки или пусковой обмотки. Реверс двигателя возможен только в состоянии покоя.
Этот тип двигателя дешев и подходит для легко пускаемых нагрузок, где частота пусков ограничена. Этот тип двигателя не используется для приводов мощностью более 1 кВт из-за низкого пускового момента. Возможны следующие применения:
- Используется в стиральных машинах и вентиляторах кондиционеров.
- Двигатели используются в миксерах-шлифовальных машинах, поломоечных машинах.
- Воздуходувки, Центробежные насосы.
- Сверлильно-токарный станок.

Это все об асинхронном двигателе с расщепленной фазой.
Что такое двигатель с фазным ротором и как он работает?
Электрические двигатели — машины, преобразующие электричество в механическую энергию — широко распространены в инженерном мире. Они являются краеугольным камнем инженерных достижений, таких как лифты, насосы и даже электромобили, благодаря способности использовать эффект электромагнитной индукции. Эти так называемые асинхронные двигатели используют переменный ток и электромагнетизм для создания вращательного движения и бывают разных конфигураций. Особое внимание в этой статье будет уделено асинхронному двигателю переменного тока особого типа, известному как двигатель с фазным ротором. Хотя эти двигатели используются только в особых сценариях, они имеют явное преимущество перед другими популярными вариантами (беличьей клеткой, синхронными двигателями и т. д.) благодаря своим уникальным характеристикам. Будут изучены устройство и работа этих двигателей, а также конкретные характеристики, которые делают их жизненно важными для приложений, где другие, более популярные асинхронные двигатели не могут быть реализованы.
Что такое двигатели с фазным ротором?
Двигатели с фазным ротором представляют собой особый тип двигателей переменного тока и работают почти так же, как и другие асинхронные двигатели. Они состоят из двух основных компонентов: внешнего статора и внутреннего ротора, разделенных небольшим воздушным зазором. Статор, как правило, одинаков для всех асинхронных двигателей и состоит из металлических пластин, которые удерживают на месте обмотки из медного или алюминиевого провода. В статоре есть три отдельные катушки, на которые подается трехфазный переменный ток, что просто означает, что каждая из них питается от отдельного переменного тока. Это не всегда так: некоторые двигатели являются однофазными, но двигатели с фазным ротором, как правило, всегда трехфазные. Тем не менее, эти три фазы генерируют магнитное поле, которое смещается вместе с переменными токами. Это создает вращающееся магнитное поле (RMF), которое действует на ротор. В двигателях с фазным ротором ротор «обмотан» проводом, как и статор, причем их концевые концы соединены с 3 контактными кольцами на выходном валу.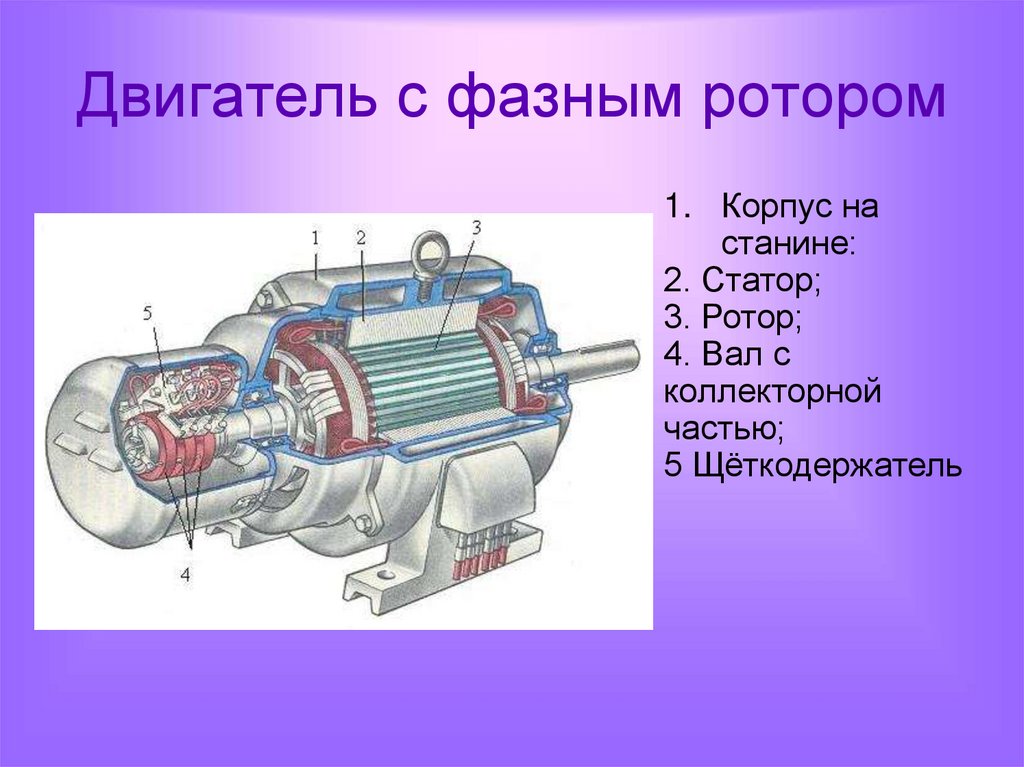 Эти контактные кольца прикреплены к щеткам и блокам резисторов переменной мощности, где операторы могут изменять скорость двигателя, изменяя сопротивление катушек ротора. Эти контактные кольца позволяют регулировать скорость и крутящий момент и являются отличительной чертой двигателей с фазным ротором (именно поэтому эти двигатели часто называют двигателями с контактными кольцами).
Эти контактные кольца прикреплены к щеткам и блокам резисторов переменной мощности, где операторы могут изменять скорость двигателя, изменяя сопротивление катушек ротора. Эти контактные кольца позволяют регулировать скорость и крутящий момент и являются отличительной чертой двигателей с фазным ротором (именно поэтому эти двигатели часто называют двигателями с контактными кольцами).
Как работают двигатели с фазным ротором?
Мы рекомендуем прочитать нашу статью об асинхронных двигателях, чтобы понять основные законы, общие для всех асинхронных машин, но в этой статье мы кратко объясним науку, лежащую в основе работы двигателя с фазным ротором.
Эти двигатели классифицируются как асинхронные двигатели, в которых существует несоответствие (известное как «скольжение») между скоростью RMF статора (синхронная скорость) и выходной скоростью (номинальная скорость). При создании необходимого тока, напряжения и магнитной силы в обмотках ротора двигатель всегда будет испытывать проскальзывание между вращающимся полем и ротором. Не стесняйтесь посетить нашу статью о типах двигателей переменного тока, чтобы узнать больше.
Не стесняйтесь посетить нашу статью о типах двигателей переменного тока, чтобы узнать больше.
Двигатели с фазным ротором отличаются тем, как их ротор взаимодействует со статором. Обмотки ротора подключены к вторичной цепи, содержащей токосъемные кольца, щетки и внешние резисторы, и питаются от отдельного трехфазного переменного тока. При пуске внешнее сопротивление этой вторичной цепи приводит к тому, что ток ротора снижает силу RMF статора (он протекает более «в фазе» с RMF статора). Это означает, что скорость вращения можно контролировать, изменяя сопротивление, когда двигатель достигает 100% скорости, что позволяет операторам выбирать пусковой момент и рабочие характеристики. Это приводит к плавному пуску, высокому начальному крутящему моменту, низкому начальному току и возможности регулировать скорость вращения, чего нельзя достичь в более простых конструкциях, таких как двигатели с короткозамкнутым ротором (более подробную информацию об этой конструкции можно найти в нашей статье). на двигателях с короткозамкнутым ротором).
на двигателях с короткозамкнутым ротором).
Технические характеристики двигателя с фазным ротором
Спецификации для двигателя с фазным ротором включают в себя понимание спецификаций для всех асинхронных двигателей, которые можно просмотреть в нашей статье, посвященной асинхронным двигателям. В этой статье будут освещены важные концепции для двигателей с фазным ротором, которые необходимо понять перед покупкой одного из них, но знайте, что это не все включено.
Пусковой ток
RMF статора вращается на полной скорости при запуске трехфазного асинхронного двигателя, в то время как ротор изначально находится в состоянии покоя. Ротор испытывает наведенный ток, когда через него проходит среднеквадратичное магнитное поле статора, и единственным ограничивающим фактором для этого тока является сопротивление обмоток ротора (ток = напряжение/сопротивление). Это приводит к большему току в роторе, что увеличивает потребность в токе в статоре и, следовательно, вызывает «бросок» пускового тока в двигатель. Этот ток может в два-семь раз превышать номинальный ток, указанный на паспортной табличке, и может вызвать серьезные проблемы в сценариях с высоким напряжением. Когда двигатель достигает номинальной скорости, ротор создает «противоЭДС» в статоре, которая снижает ток статора до номинального уровня. Пусковой ток — это то, что минимизируется в двигателях с фазным ротором за счет увеличения сопротивления в обмотках ротора (I=V/R, где R увеличивается), и поэтому они имеют такие плавные пусковые характеристики.
Этот ток может в два-семь раз превышать номинальный ток, указанный на паспортной табличке, и может вызвать серьезные проблемы в сценариях с высоким напряжением. Когда двигатель достигает номинальной скорости, ротор создает «противоЭДС» в статоре, которая снижает ток статора до номинального уровня. Пусковой ток — это то, что минимизируется в двигателях с фазным ротором за счет увеличения сопротивления в обмотках ротора (I=V/R, где R увеличивается), и поэтому они имеют такие плавные пусковые характеристики.
Момент двигателя и кривая момент-скорость
Наиболее важной характеристикой двигателей с фазным ротором является то, как они работают после подачи питания, и это визуализируется с помощью графиков крутящий момент-скорость. Асинхронные двигатели могут значительно превышать номинальный крутящий момент и ток, когда скорость не равна 100%; кривые крутящего момента и скорости отображают это переходное поведение, а на рисунке 1 показана общая кривая крутящего момента для асинхронных двигателей с обозначенными важными точками.
Рис. 1: Кривая крутящий момент-скорость для асинхронных двигателей.
Пусковой крутящий момент — это крутящий момент, создаваемый начальным пусковым током, который всегда выше номинального крутящего момента. Момент отрыва — это максимальный крутящий момент, достигаемый перед установившимся режимом, а номинальный крутящий момент — это то, что обеспечивается, когда двигатель достигает скорости 100 %. Эта связанная скорость не совсем равна синхронной скорости RMF, и это проскальзывание показано на рисунке 1.
Двигатели
, использующие популярные конструкции с короткозамкнутым ротором, имеют ограниченный контроль над своими кривыми крутящий момент-скорость (узнайте больше в нашей статье о двигателях с короткозамкнутым ротором). Стержни ротора с короткозамкнутым ротором закорочены; это приводит к невозможности изменить сопротивление ротора, а это означает, что единственный способ повлиять на скорость вращения — это изменить напряжение (I=V/R, где R постоянно). Это может вызвать проблемы в больших двигателях, где необходимый входной ток может стать опасно высоким. Двигатели с фазным ротором решают эту проблему, изменяя сопротивление ротора с помощью вторичной цепи, присоединенной к блоку сопротивления переменной мощности и токосъемным кольцам. Увеличивая сопротивление в роторе через контактные кольца, крутящий момент может быть достигнут на гораздо более низких скоростях, что обеспечивает более высокий начальный крутящий момент и более низкий пусковой ток. При достижении синхронной скорости сопротивление ротора также может быть закорочено, в результате чего двигатель с фазным ротором будет вести себя так, как если бы это был двигатель с короткозамкнутым ротором. На рис. 2 показано влияние увеличения сопротивления ротора на выходной крутящий момент.
Это может вызвать проблемы в больших двигателях, где необходимый входной ток может стать опасно высоким. Двигатели с фазным ротором решают эту проблему, изменяя сопротивление ротора с помощью вторичной цепи, присоединенной к блоку сопротивления переменной мощности и токосъемным кольцам. Увеличивая сопротивление в роторе через контактные кольца, крутящий момент может быть достигнут на гораздо более низких скоростях, что обеспечивает более высокий начальный крутящий момент и более низкий пусковой ток. При достижении синхронной скорости сопротивление ротора также может быть закорочено, в результате чего двигатель с фазным ротором будет вести себя так, как если бы это был двигатель с короткозамкнутым ротором. На рис. 2 показано влияние увеличения сопротивления ротора на выходной крутящий момент.
Рис. 2. Влияние изменения сопротивления ротора на пусковой момент и пусковой момент.
На этом графике видно, что двигатель с фазным ротором гораздо лучше справляется с управлением током, крутящим моментом и скоростью, чем другие конструкции. Изменяя сопротивление, этим двигателям потребуется меньший начальный пусковой ток для компенсации, они будут иметь более высокий пусковой момент и могут максимизировать свой пусковой момент, также сделав его пусковым моментом (пример кривой R2 на рис. 2). Результатом такого подхода является регулируемый по скорости двигатель с высоким пусковым моментом и низким пусковым током, с возможностью изменения этих характеристик по желанию оператора.
Изменяя сопротивление, этим двигателям потребуется меньший начальный пусковой ток для компенсации, они будут иметь более высокий пусковой момент и могут максимизировать свой пусковой момент, также сделав его пусковым моментом (пример кривой R2 на рис. 2). Результатом такого подхода является регулируемый по скорости двигатель с высоким пусковым моментом и низким пусковым током, с возможностью изменения этих характеристик по желанию оператора.
Применение и критерии выбора
Двигатели с фазным ротором могут выполнять то, что другие асинхронные двигатели не могут, а именно управление скоростью, током и крутящим моментом. Возможность увеличения сопротивления ротора при пуске двигателя позволяет плавно разгонять большие нагрузки до номинальной скорости. Когда пусковой ток должен быть сведен к минимуму или ограничение пускового тока ниже, чем могут выдержать двигатели с короткозамкнутым ротором/синхронные двигатели, рассмотрите возможность использования двигателя с фазным ротором.
У двигателей с фазным ротором есть недостатки, и они являются следствием их сложной конструкции. Вторичная цепь создает больше возможностей для ошибок, а щетки с контактными кольцами могут представлять угрозу безопасности, если их не проверять регулярно (изношенные щетки могут искрить и увеличивать риск возгорания). Эти двигатели также дороги в обслуживании, что увеличивает их и без того высокую цену. Их сложность также снижает общий КПД двигателя, и двигатель с короткозамкнутым ротором следует выбирать, если эффективность является основной задачей или конструктивным ограничением.
Несмотря на то, что двигатель с фазным ротором дорог и менее эффективен, его регулируемые характеристики крутящего момента и скорости отлично подходят для привода больших шаровых мельниц, больших прессов, насосов с регулируемой скоростью, кранов, подъемников и других нагрузок с высокой инерцией. Они также отлично подходят для любого приложения, которое требует плавного запуска и возможности изменения скорости.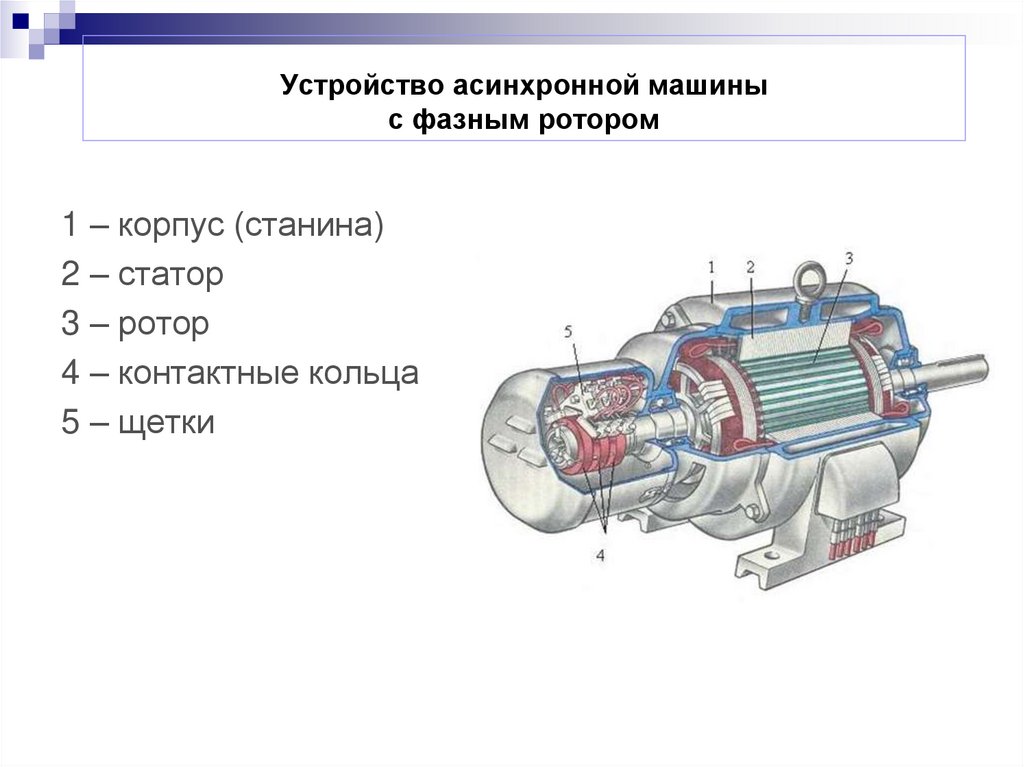 Они охватывают основы, недоступные другим асинхронным двигателям, и бесценны для разработчиков, которым необходим абсолютный контроль над выходной скоростью и крутящим моментом.
Они охватывают основы, недоступные другим асинхронным двигателям, и бесценны для разработчиков, которым необходим абсолютный контроль над выходной скоростью и крутящим моментом.
Резюме
В этой статье представлено понимание того, что такое двигатели с фазным ротором, как они работают и каковы их основные характеристики, определяющие, когда их следует выбирать по сравнению со стандартными асинхронными двигателями. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://hyperphysics.phy-astr.gsu.edu/hbase/magnet/indmot.html
- http://www.egr.unlv.edu/~eebag/Induction%20Motors.pdf
- https://oaktrust.library.tamu.edu/bitstream/handle/1969.1/163595/T17123-130.pdf?sequence=1&isAllowed=y
- http://www.