Содержание
Асинхронный электродвигатель постоянного тока — Статья TechnoGroup
Содержание
- Асинхронный электродвигатель постоянного тока — это миф?
- Принцип работы асинхронного электродвигателя
- Принцип работы электродвигателя постоянного тока
- Вывод
При помощи современных электрических моторов приводится в действие бытовая техника, всевозможные инструменты и агрегаты, станки, а также прочие подвижные механизмы и устройства. Сегодня такие моторы отличаются мощностью, характеристиками, габаритными размерами, а также возможностью регулирования скорости вращения вала и частоты, для чего в цепь включают узел переменного сопротивления.
С момента своего изобретения в середине XIX века все двигатели имели синхронный тип исполнения и работали на постоянном токе. Однако в 1889 году российским инженером был разработан первый асинхронный двигатель, который имел короткозамкнутый ротор, причем работал он на переменном токе. Сегодня многие люди ищут асинхронный электродвигатель постоянного тока, однако не понимают, что таких устройств не бывает, поскольку такие моторы имеют совершенно иной принцип работы.
Сегодня многие люди ищут асинхронный электродвигатель постоянного тока, однако не понимают, что таких устройств не бывает, поскольку такие моторы имеют совершенно иной принцип работы.
Для лучшего понимания данного вопроса, внимательно рассмотрим, что представляют собой синхронные и асинхронные двигатели. Это позволит лучше разобраться в конструкционных особенностях современных электрических двигателей, их функциональности и основных характеристиках.
Асинхронный электродвигатель постоянного тока — это миф?
Важно понимать, что основное различие между асинхронными и синхронными электродвигателями связано с принципом синхронизации вращающегося магнитного поля статора с ротором. Все моторы синхронного типа работают на переменном токе и имеют обмотку статора, которая создает вращающееся магнитное поле. Здесь ротор состоит из проводников, в которых индуцируются токи под действием переменного магнитного поля статора.
Ротор не синхронизируется с магнитным полем статора и движется с некоторой разницей скоростей, что приводит к появлению момента вращения. Что касается электродвигателя постоянного тока (ЭДПТ), то он имеет постоянные магнитные обмотки как на статоре, так и на роторе. В этом типе двигателя магнитное поле ротора и статора полностью синхронизировано, что позволяет эффективно передавать момент вращения.
Что касается электродвигателя постоянного тока (ЭДПТ), то он имеет постоянные магнитные обмотки как на статоре, так и на роторе. В этом типе двигателя магнитное поле ротора и статора полностью синхронизировано, что позволяет эффективно передавать момент вращения.
Таким образом, существуют два основных типа электродвигателей — асинхронные и постоянного тока, которые отличаются друг от друга. Любой асинхронный ЭДТ способен работать только на переменном токе, что важно понимать с самого начала.
Принцип работы асинхронного электродвигателя
Сегодня в подавляющем большинстве случаев используются двигатели асинхронного типа, поскольку они отличаются неприхотливостью в работе, высокой надежностью, а также способностью справляться с большими эксплуатационными нагрузками. С точки зрения конструкции, они являются достаточно простыми и включают в себя следующие элементы:
- сердечник статора;
- вал;
- сердечник ротора;
- станина
- обмотка.


Фактически весь двигатель располагается внутри станины, которая должна иметь достаточную физическую прочность, чтобы выдерживать большие нагрузки. При этом, чем больше мощность агрегата, тем прочнее должна быть станина. В роли магнитного проводника, который является основой рабочего поля, выступает сердечник статора. В его пазы укладывается обмотка, через которую проходит электрический ток, который приводит к формированию ЭДС.
Ротор представляет собой подвижный элемент, который может быть фазным или короткозамкнутым, в зависимости от конструкционных особенностей. В состав входит сердечник, который создан из шихтованной стали, а также «беличья клетка». Вся данная конструкция насаживается на стальной вал, который передает механическое усилие и обеспечивает тем самым вращение.
Принцип функционирования асинхронного двигателя заключается в том, что вокруг проводника, где протекает электрический ток, формируется электромагнитное поле. Однако благодаря влиянию вихревых токов, создается собственная ЭДС, которая формирует отдельное электромагнитное поле статора. В результате возникает разница во вращении полей, где ротор по факту стремится догнать поля статора, вследствие чего и возникает асинхронизация.
В результате возникает разница во вращении полей, где ротор по факту стремится догнать поля статора, вследствие чего и возникает асинхронизация.
Принцип работы электродвигателя постоянного тока
Если рассматривать электрический двигатель постоянного тока, то в его основе лежит статор — индуктор (неподвижная часть), внутри которого располагается щеточно- коллекторный узел и якорь. При этом между ними присутствуют воздушный зазор. Якорь представляет собой узел, который состоит из листов, а также проводников (набора обмоток), которые уложены в специальные пазы.
Сам коллектор имеет цилиндрическую форму и выполнен из специальных изолированных пластин медного типа. Он специальным образом насаживается на вал мотора, который имеет определенные выступы, куда подходят концы секций обмотки якоря. Из особенностей и преимуществ электрических двигатели постоянного тока выделяют следующее:
- простое и интуитивно понятное управление;
- высокая надежность и устойчивость к большим физическим нагрузкам;
- универсальность практического использования, поскольку при необходимости его можно использовать как генератор;
- легкий пуск без необходимости установки дополнительных узлов;
- возможность изменения направления вращения вала.

Принцип работы электрического двигателя постоянного тока заключается во взаимодействии магнитных полей, что заставляет якорь поворачиваться на определенный угол.
Вывод
Подводя итоги всему вышеизложенному, можно сделать уверенный вывод о том, что асинхронных двигателей постоянного тока не бывает, поскольку их работа основывается на качественно ином принципе.
Каждый из моторов имеет свою сферу практического использования и специфику, коэффициент полезного действия и прочие характеристики, что и обуславливает их применение. При покупке электрического мотора следует обращать внимание на качество исполнения, надежность, а также гарантию со стороны завода-изготовителя.
типы агрегатов, назначение асинхронного и синхронного оборудования
Обновлено: 15.07.2023
Асинхронный электродвигатель — это электрический агрегат с вращающимся ротором. Скорость вращения ротора отличается от скорости, с которой вращается магнитное поле статора. Это — одна из важных особенностей работы агрегата, так как если скорости выровняются, то магнитное поле не будет наводить в роторе ток и действие силы на роторную часть прекратится.![]() Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
В данной статье мы сфокусируемся на том, что представляет собой схема работы такого двигателя и — самое главное, насколько она эффективна при его эксплуатации.
Устройство и принцип действия
Ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности.
Асинхронный двигатель
Подробнее о принципах работы асинхронного электродвигателя — в частности, на примере агрегата трехфазного тока, вы можете прочесть здесь, на сайте, в одном из наших материалов. Далее же мы разберем, какие бывают разновидности асинхронных электрических машин.
Виды асинхронных двигателей
Можно выделить 3 базовых типа асинхронных электродвигателей:
- 1-фазный — с короткозамкнутым ротором
- 3-х фазный — с короткозамкнутым ротором
- 3-х фазный — с фазным ротором
Схема устройства асинхронного двигателя с короткозамкнутым ротором
То есть, двигатели классифицируются по количеству фаз (1 и 3) и по типу ротора — с короткозамкнутым и с фазным. При этом число фаз с установленным типом ротора никак не взаимосвязано.
Ещё одна разновидность — асинхронный двигатель с массивным ротором. Ротор сделан целиком из ферромагнитного материала и фактически представляет собой стальной цилиндр, играющий роль как магнитопровода, так и проводника (вместо обмотки). Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Какой ротор лучше, фазный или короткозамкнутый?
- Более-менее постоянная скорость вне зависимости от разных нагрузок
- Допустимость кратковременных механических перегрузок
- Простая конструкция, легкость пуска и автоматизации
- Более высокие cos φ (коэффициент мощности) и КПД, чем у электродвигателей с фазным ротором
- Трудности в регулировании скорости вращения
- Большой пусковой ток
- Низкий мощностной коэффициент при недогрузках
- Высокий начальный вращающий момент
- Допустимость кратковременных механических перегрузок
- Более-менее постоянная скорость при разных перегрузках
- Меньший пусковой ток, чем у двигателей с короткозамкнутым ротором
- Возможность использования автоматических пусковых устройств
- Большие габариты
- Коэффициент мощности и КПД ниже, чем у электродвигателей с короткозамкнутым ротором
Какой двигатель лучше выбрать?
Асинхронный или коллекторный? Синхронный или асинхронный? Сказать однозначно, что определенный тип двигателя лучше, точно нельзя. В пользу асинхронных моделей говорят их следующие преимущества.
В пользу асинхронных моделей говорят их следующие преимущества.
- Относительно небольшая стоимость
- Низкие эксплуатационные затраты
- Отсутствие необходимости в преобразователях при включении в сеть (только для нагрузок, не нуждающихся в регулировании скорости)
- Отсутствие потребности в дополнительном источнике питания — в отличие от синхронных аналогов
Тем не менее, у асинхроников есть недостатки. А именно:
- Малый пусковой момент
- Высокий пусковой ток
- Отсутствие возможности регулировки скорости при подключении к сети
- Ограничение максимальной скорости частотой сети
- Высокая зависимость электромагнитного момента от напряжения питающей сети
- Низкий мощностной коэффициент — в отличие от синхронных агрегатов
Тем не менее, все перечисленные недостатки можно устранить, если питать асинхронный двигатель от статического частотного преобразователя. Кроме того, если соблюдать правила эксплуатации и не перегружать агрегаты, то они исправно прослужат длительный срок.
Но даже несмотря на то, что синхронные машины обладают довольно конкурентными преимуществами, большинство двигателей сегодня — именно асинхронные. Промышленность, сельское хозяйство, ЖКХ и многие другие отрасли используют именно их за счет высокого КПД. Но коэффициент полезного действия может значительно снижаться за счет таких параметров, как:
- Высокий пусковой ток
- Слабый пусковой момент
- Рассинхрон между механическим моментом на валу привода и механической нагрузкой (это провоцирует высокий рост силы тока и избыточные нагрузки при запуске, а также снижение КПД при пониженной нагрузке)
- Невозможность точной регулировки скорости работы прибора
Другими факторами, от которых зависит КПД асинхронного электродвигателя, являются:
- степень загрузки двигателя по отношению к номинальной
- конструкция и модель
- степень износа
- отклонение напряжения в сети от номинального.
Как избежать снижения КПД?
- Обеспечение стабильного уровня загрузки — не ниже 75%
- Увеличение мощностного коэффициента
- Регулировать напряжение и частоту подаваемого тока
Для этого используются:
- Частотные преобразователи — они плавно изменяют скорость вращения двигателя путем изменения частоты питающего напряжения
- Устройства плавного пуска — они ограничивают скорость нарастания пускового тока и его предельное значение, как одни из факторов, из-за которых падает КПД
Итак, асинхронный двигатель имеет довольно широкую область использования и применяется во многих хозяйственных и производственных сферах деятельности. У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
Электродвигатели представляют собой универсальные в использовании агрегаты, способные преобразовывать электричество в механическую энергию. Сегодня существуют различные типы и классификации электродвигателей, применяемых в бытовых и промышленных установках. Такая техника может различаться своим принципом работы, питанием от постоянного или переменного тока, мощностью и назначением.
Принцип действия и особенности конструкции
Устройство электродвигателя стандартно, что позволяет существенно упростить эксплуатацию и ремонт техники. Статор и ротор, которые являются основными элементами техники, находятся внутри проточки цилиндрической формы. При подаче напряжения на неподвижную обмотку статора возбуждается магнитное поле, что и приводит в движение ротор и вал электродвигателя.
Постоянное движение ротора поддерживается за счёт перекоммутации обмоток или путем создания в статоре вращающегося магнитного поля. Если первый способ поддержки вращения вала характерен для коллекторных модификаций агрегатов, то образование вращающегося магнитного поля присуще для трехфазных асинхронных моторов.
Если первый способ поддержки вращения вала характерен для коллекторных модификаций агрегатов, то образование вращающегося магнитного поля присуще для трехфазных асинхронных моторов.
Корпус электрического двигателя может быть изготовлен из алюминиевого сплава или чугуна. В каждом конкретном случае выбор материала корпуса осуществляется исходя из сферы использования техники и ее необходимых параметров по весу.
Все двигатели изготавливаются с однотипными установочными размерами, что позволяет существенно упростить их монтаж и последующую эксплуатацию.
Сфера использования
Назначение электродвигателя чрезвычайно широко. Такие агрегаты используются для усиления мощности электросигналов, они способны преобразовывать постоянный ток в переменный, могут применяться в различных типах электромашин. Принято различать агрегаты, предназначенные для использования в промышленном оборудовании, машиностроении, на различных грузоподъёмных машинах и спецтехнике. Также большой популярностью пользуются маломощные электрические двигатели, которые с успехом применяются в различных бытовых инструментах и кухонной технике.
Также большой популярностью пользуются маломощные электрические двигатели, которые с успехом применяются в различных бытовых инструментах и кухонной технике.
Классификация оборудования
На сегодняшний день существуют различные классификации электрических двигателей, которые отличаются по разным критериям и характеристикам. В зависимости от особенностей техники ее принято классифицировать:
- По специфике вращающего момента различают магнитоэлектрические и гистерезисные агрегаты.
- По виду крепления принято выделять двигатели с горизонтальным и вертикальным расположением вала.
- По классу защиты от воздействия внешней среды различают защищенные, закрытые и взрывонепроницаемые.
В модификации гистерезисного типа вращение вала основывается на перемагничивании ротора. Такие двигатели были популярны в прошлом, однако сегодня их конструкция устарела, поэтому они практически не встречаются. Наибольшее распространение получили магнитоэлектрические агрегаты, способные работать от переменного или постоянного тока, а также модели универсального типа, которые одновременно питаются переменным и постоянным током.
Магнитоэлектрические установки
Использование магнитоэлектрических модификаций двигателей, работающих на постоянном токе, позволяет получить отличные динамические и эксплуатационные характеристики. В зависимости от своей конструкции такой тип двигателей делится на две основные категории:
- с постоянными магнитами;
- с электромагнитами.
В последние годы наибольшей популярностью стали пользоваться модификации с электромагнитами, которые обладают большей мощностью, отличаются экономичностью в работе и позволяют быстро изменять параметры работы оборудования.
В коллекторных электродвигателях используется щеточный узел, обеспечивающий соединение вращающихся и неподвижных частей мотора. Такие агрегаты могут выполняться с независимым возбуждением и применением постоянных магнитов, но есть и такие, что имеют самовозбуждающийся тип со смешанным, последовательным или параллельным соединением. Коллекторные модификации отличаются посредственными показателями надежности. Они требуют грамотного и своевременного обслуживания.
Коллекторные модификации отличаются посредственными показателями надежности. Они требуют грамотного и своевременного обслуживания.
Бесколлекторные вентильные агрегаты имеют замкнутую систему, которая работает по принципу синхронных устройств. Высококачественные бесколлекторные электродвигатели оснащаются датчиком считывания положения ротора, имеют преобразователь координат, на основании данных с которого и осуществляется работа устройства.
Вентильные типы двигателей могут иметь различные размеры и мощность. Такие агрегаты используются в промышленном оборудовании. Также ими оснащаются аккумуляторные инструменты, различные игрушки и мобильные телефоны.
Синхронные электродвигатели
К синхронным электродвигателям переменного тока относятся модификации, у которых ротор вращается синхронно с генерируемым магнитным полем. Особенностью таких агрегатов является их высокая мощность, которая может достигать сотен киловатт. Основной сферой использования синхронного оборудования являются мощные промышленные установки, ветряные генераторы и гидроэлектростанции.
Основной сферой использования синхронного оборудования являются мощные промышленные установки, ветряные генераторы и гидроэлектростанции.
Принято различать несколько модификаций синхронных электродвигателей:
- шаговые;
- реактивные;
- с постоянными магнитами;
- реактивно гистерезисные;
- вентильные реактивные;
- с обмотками возбуждения;
- гибридные синхронные.
У шаговых синхронных двигателей с дискретным угловым движением вала положение ротора будет фиксироваться путём подачи напряжения на обмотки контура. Переход в другое положение вала осуществляется за счёт снятия питания с одних обмоток и последующей подачи напряжения на другие обмотки трансформатора.
Также широкое распространение получил вентильный реактивный электродвигатель, у которого обмотка выполнена из полупроводниковых элементов. Вентильные реактивные агрегаты отличаются увеличенной мощностью, при этом они могут полностью управляться электроникой, что позволяет как поддерживать минимальные обороты, так и быстро выходить на полную мощность с максимальной частотой оборотов. К преимуществам синхронных двигателей принято относить:
К преимуществам синхронных двигателей принято относить:
- стабильную скорость вращения;
- низкую чувствительность к перепадам напряжения в сети;
- возможность использования в качестве генератора мощности;
- минимальное потребление электроэнергии.
Однако и недостатки у синхронных устройств всё же имеются. К ним относятся сложности с запуском, трудности с обслуживанием, а также проблемы с регулировкой частоты вращения вала. Основное назначение таких устройств — это мощное промышленное оборудование, где ценится производительность агрегатов и их надежность.
Асинхронные модификации
У асинхронных двигателей переменного тока частота вращения ротора будет отличаться от показателей магнитного поля. Такие агрегаты называют также индукционными, что объясняется принципом генерации магнитного поля, которое возникает за счёт перемещения статора. Асинхронные модификации получили наибольшее распространение, что объясняется простотой их конструкции, надежностью, долговечностью, а также возможностью выполнения как сверхмощных промышленных установок, так и небольших электродвигателей, предназначенных для использования в бытовых инструментах.
В зависимости от типа электротока, с которым работают такие агрегаты, их принято разделять на три категории:
- однофазные;
- двухфазные;
- трехфазные.
Наибольшее распространение сегодня получили однофазные асинхронные двигатели, которые способны работать от бытовой электросети. Особенностью однофазных двигателей является наличие на статоре только одной рабочей обмотки и короткозамкнутого ротора. На обмотку статора подается переменный однофазный ток, приводящий во вращение ротор и вал двигателя. Сам ротор имеет цилиндрический сердечник с залитыми алюминием ячейками и открытыми вентиляционными лопастями. Однофазные двигатели с короткозамкнутым ротором используются в небольших по своей мощности устройствах, водяных насосах и комнатных вентиляторах.
Двухфазные асинхронные двигатели предназначены для использования в однофазной сети с переменным током. Их особенностью является наличие на статоре двух рабочих обмоток, расположенных перпендикулярно друг к другу. Во время работы агрегата на одну обмотку напрямую подаётся переменный ток, а на вторую — через соответствующий фазосдвигающий конденсатор. На выходе образуется крутящееся магнитное поле, которое упрощает запуск электромотора и в последующем поддерживает стабильно высокие обороты.
Во время работы агрегата на одну обмотку напрямую подаётся переменный ток, а на вторую — через соответствующий фазосдвигающий конденсатор. На выходе образуется крутящееся магнитное поле, которое упрощает запуск электромотора и в последующем поддерживает стабильно высокие обороты.
Трехфазные двигатели могут иметь короткозамкнутый и фазный ротор. Агрегаты оснащены тремя рабочими обмотками, расположенными на статоре параллельно друг другу. При включении двигателя в трехфазную сеть магнитное поле имеет сдвиг в пространстве относительно обмотки на 120 градусов. Наличие короткозамкнутого поля позволяет упростить запуск в работу устройства, при этом в последующем поддерживаются стабильные обороты. Модификации двигателей с фазным ротором отличаются увеличенной мощностью и используются преимущественно в промышленном оборудовании.
Преимуществами асинхронных электромоторов являются их устойчивость к скачкам напряжения и универсальность использования. Благодаря простоте конструкции существенно упрощается их последующее обслуживание, а сама техника чрезвычайно надежна и в процессе эксплуатации не доставляет каких-либо хлопот. В зависимости от своей модификации установки могут работать как от мощного источника электричества в трехфазной сети, так и от бытовой электросети, что позволяет применять их в различной бытовой технике и всевозможных электроприборах.
В зависимости от своей модификации установки могут работать как от мощного источника электричества в трехфазной сети, так и от бытовой электросети, что позволяет применять их в различной бытовой технике и всевозможных электроприборах.
Электродвигатели представляют собой простейшие и чрезвычайно надёжные устройства, которые широко используются в промышленности и быту. Существующие в настоящее время типы электродвигателей позволяют подобрать агрегат, который будет полностью соответствовать особенностям своей эксплуатации. С помощью таких моторов могут приводиться в движение мощные станки и оборудование, производительные насосы. Без их использования не обходится ни один бытовой электроприбор.
Как разработать двигательную установку? Для проектирования системы любого типа имеет значение кинематическая схема и эксплуатационные условия, указанные в задании. Записав требуемые технические данные, приступают к кинематическому расчету, который является исходным для силового и энергетического расчета, как отдельных механизмов, так и всей системы.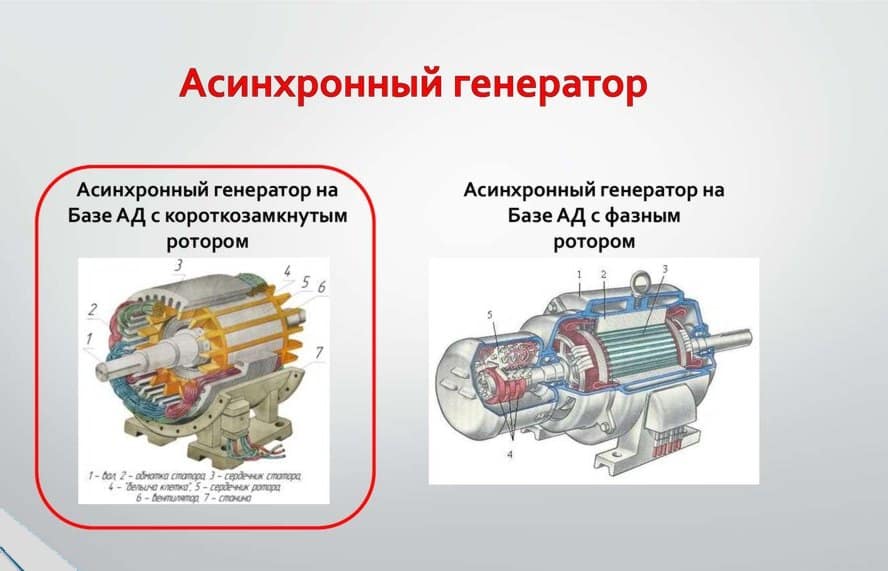 Чтобы к установке правильно подобрать электрический двигатель надо понимать из чего можно выбрать. Поэтому ниже рассмотрим какими они бывают.
Чтобы к установке правильно подобрать электрический двигатель надо понимать из чего можно выбрать. Поэтому ниже рассмотрим какими они бывают.
Выбор двигателя
Выбор электродвигателя того или иного типа осуществляется на основе технических расчетов, которые выполняются в установленной последовательности:
- расчет мощности и ориентировочный выбор агрегата;
- проверка мотора по пусковым параметрам, перегрузке и нагреву.
Требуемая мощность, скорость и другие параметры определяются на основании исходных данных — рабочих характеристик машины. Значения КПД отдельных узлов кинематической цепи должны соответствовать приведенным данным справочных таблиц.
В зависимости от принципа работы существуют следующие типы электродвигателей:
Любой тип может быть одно-, двух- или трёхфазным. Трехфазные моторы составляют около 70% двигательной техники в промышленности. Однофазные также очень широко применяются в индустрии и составляют около 10-15% моторов.
Асинхронные двигатели
В асинхронных агрегатах весь процесс опирается на небольшую разницу в скорости между магнитными полями статора и ротора, вызывающую ток в обмотке ротора. Расчет мощности и предварительный выбор мотора производится по эквивалентному моменту сопротивления и частоте. Асинхронные двигатели бывают с короткозамкнутым и фазным ротором, как показано на структурной схеме.
Все основные параметры (обмотка, пазы статора) асинхронного мотора имеют соответствующие соотношения. Определиться с выбором техники помогают предварительный и проверочный расчёт основных параметров.
Однофазные асинхронные моторы бывают бытового назначения, потребляемая мощность их обычно невелика. К ним относятся:
- вентиляторы,
- кондиционеры,
- стиральные машины,
- компрессоры холодильников,
- водяные насосы.
Трехфазные асинхронные двигатели используются там, где необходимо большое количество электроэнергии, например, в стартерах, гидравлических насосах. Приводы переменного тока становятся все популярнее с каждым годом.
Приводы переменного тока становятся все популярнее с каждым годом.
Синхронные двигатели
Расчет начальных условий для синхронных двигателей здесь не особенно важен, потому что процесс эксплуатации не основан на скольжении и индукции. Синхронные двигатели бывают:
- с электромагнитным возбуждением;
- с постоянными магнитами;
- реактивные, гистерезисные.
Однофазные синхронные электродвигатели являются распространенными источниками питания для работы электрических часов и другого мелкого высокоточного оборудования. Они требуют применения некоторого вспомогательного метода, чтобы довести их до синхронной скорости, то есть, чтобы запустить их. Обычно пусковая обмотка состоит из вспомогательной обмотки статора.
Работа трехфазных синхронных электродвигателей при постоянной синхронной скорости чаще используется для работы в системах синхронизатора.
Электродвигатели переменного тока различаются в зависимости:
- от скорости работы — постоянной, переменной и регулируемой;
- от конструктивных особенностей, то есть могут быть открытыми, полузакрытыми, вентилируемыми и т. д.
 д.
д.Если говорить про другие виды электродвигателей переменного тока, выпускаемые современной промышленностью, то, несмотря на широкое разнообразие, все они относятся к механически коммутируемым машинам, в которых скорость зависит от напряжения и соединения обмоток.
Электродвигатели и приводы широко применяются в различных сферах. Электромоторы переменного тока являются надёжными, недорогими, обладают хорошими эксплуатационными качествами. Низковольтные приводы переменного тока имеют прекрасную репутацию, а количество установленных и эксплуатируемых приводов исчисляется уже на сотни. Способ управления машинами с помощью привода обладает достоинствами с точки зрения экономии энергии и совершенствования технологических процессов.
Читайте также:
- Какая нужна антенна телевизора для приема волн разной длины: разновидности усилителей для домашнего ТВ
- Как подключить светодиод к 220в: схемы подключения диодов в сеть переменного тока на 220 вольт, как включить в питание через конденсатор и резистор без блока питания, какие диоды подходят
- Виды гальванических элементов: устройство и работа солевых, щелочных и литиевых батарей и аккумуляторов
Двигатели постоянного и переменного тока
: отличия и преимущества
Автор: Брэдли | 3 комментария
Запрос цитаты
Электродвигатели играют важную роль почти во всех отраслях промышленности. Использование правильного типа двигателя с высококачественными деталями и регулярное техническое обслуживание обеспечивают бесперебойную работу вашего объекта и предотвращают повреждение конечного оборудования из-за износа или скачков напряжения.
Использование правильного типа двигателя с высококачественными деталями и регулярное техническое обслуживание обеспечивают бесперебойную работу вашего объекта и предотвращают повреждение конечного оборудования из-за износа или скачков напряжения.
Gainesville Industrial Electric может помочь вашей компании выбрать правильные промышленные электродвигатели и детали для ваших приложений.
A Учебник по электродвигателям
Электродвигатели — это машины, которые преобразуют электрическую энергию — либо накопленную энергию, либо прямое электрическое соединение — в механическую энергию посредством создания вращательной силы. Двумя основными типами электродвигателей являются:
- Двигатели переменного тока , работающие от переменного тока
- Двигатели постоянного тока , которые питаются от постоянного тока
Как работают электродвигатели
Как двигатели переменного, так и постоянного тока используют электрический ток для создания вращающихся магнитных полей, которые, в свою очередь, создают вращательную механическую силу в якоре, расположенном на роторе или статоре, вокруг вала. В различных конструкциях двигателей используется одна и та же базовая концепция для преобразования электрической энергии в мощные импульсы силы и обеспечения динамических уровней скорости или мощности.
В различных конструкциях двигателей используется одна и та же базовая концепция для преобразования электрической энергии в мощные импульсы силы и обеспечения динамических уровней скорости или мощности.
Основные компоненты двигателя
Хотя электродвигатели могут отличаться от одной конструкции или типа к другой, многие из них содержат эти Детали и узлы (расположенные от центра наружу):
- Центральный вал двигателя
- Обмотки
- Подшипники (для уменьшения трения и износа)
- Якорь (расположенный на роторе, вращающаяся часть, или на статоре, неподвижная часть)
- Щетки (в двигателях постоянного тока)
- Клеммы
- Рама и торцевые щиты
Типы электродвигателей: двигатели переменного и постоянного тока
Двигатели переменного и постоянного тока представляют собой широкие категории двигателей, которые включают более мелкие подтипы. Асинхронные двигатели, линейные двигатели и синхронные двигатели, например, все типы двигателей переменного тока. Двигатели переменного тока также могут включать частотно-регулируемые приводы для управления скоростью и крутящим моментом двигателя, а двигатели постоянного тока доступны в моделях с самовозбуждением и с независимым возбуждением.
Двигатели переменного тока также могут включать частотно-регулируемые приводы для управления скоростью и крутящим моментом двигателя, а двигатели постоянного тока доступны в моделях с самовозбуждением и с независимым возбуждением.
Привод переменного тока с регулируемой скоростью
Преимущества двигателя переменного тока по сравнению с двигателем постоянного тока
Каждый тип двигателя имеет различные преимущества, которые делают их наиболее подходящими для различных коммерческих и промышленных применений. Например, двигатели переменного тока универсальны и просты в управлении. Некоторые из их других преимуществ включают в себя:
- Низкое энергопотребление при запуске, которое также защищает компоненты на принимающей стороне
- Управляемые уровни пускового тока и ускорения
- Дополнения VFD или VSD, которые могут контролировать скорость и крутящий момент на разных этапах использования
- Высокая прочность и увеличенный срок службы
- Возможности для многофазных конфигураций
Двигатели постоянного тока также имеют свои преимущества , такие как:
- Более простая установка и обслуживание
- Высокая пусковая мощность и крутящий момент
- Быстрое время отклика на пуск, останов и ускорение
- Наличие нескольких стандартных напряжений
Какой двигатель мощнее: переменного или постоянного тока?
Двигатели переменного тока обычно считаются более мощными, чем двигатели постоянного тока, поскольку они могут генерировать более высокий крутящий момент за счет более мощного тока. Однако двигатели постоянного тока обычно более эффективны и лучше используют входную энергию. Двигатели как переменного, так и постоянного тока бывают разных размеров и мощностей, которые могут удовлетворить требования к мощности в любой отрасли.
Однако двигатели постоянного тока обычно более эффективны и лучше используют входную энергию. Двигатели как переменного, так и постоянного тока бывают разных размеров и мощностей, которые могут удовлетворить требования к мощности в любой отрасли.
Применение двигателей переменного и постоянного тока
Двигатели переменного и постоянного тока находят применение в технологических процессах и установках почти во всех отраслях промышленности. Одни из самых распространенных Промышленное применение двигателей переменного тока включает:
- Бытовые приборы
- Приводы и системы компрессоров
- Компьютеры
- Конвейерные системы
- Вентиляторы и кондиционеры
- Гидравлические и ирригационные насосы
- Транспортное оборудование
Общие промышленные применения для двигателей постоянного тока включают:
- Производство и производственные единицы
- Машины, требующие постоянной мощности, такие как пылесосы, лифты и швейные машины
- Складское сортировочное оборудование
Выбор подходящего электродвигателя для вашего промышленного применения
Установка и техническое обслуживание подходящих двигателей на объектах и оборудовании вашей компании является важным шагом к обеспечению бесперебойной работы и производства.
Gainesville Industrial Electric продает и обслуживает двигатели переменного и постоянного тока, запчасти и многое другое. Мы также являемся авторизованным заводским гарантийным центром. Чтобы получить помощь в выборе подходящего электродвигателя или промышленной сборки для вашего применения, свяжитесь с нами или запросите дополнительную информацию сегодня, чтобы получить предложение.
Связанный контент:
- Наш каталог электродвигателей
Руководство по электродвигателям
Искать:
Последние сообщения
- Инверторы
- Зубчатые редукторы
- Сельскохозяйственный электродвигатель
- Двигатели из нержавеющей стали для производства продуктов питания и напитков
- Двигатели для дробилок | Камнедробилка — особенности и области применения
Архив
- Апрель 2023
- Февраль 2023
- Январь 2023
- август 2022
- июль 2022
Категории
- Блог
- Без категории
Двигатели переменного или постоянного тока?
Очевидно, мы имеем в виду не AC-DC, группу «Highway to Hell» и «Back in Black». Вместо этого мы задаем вопрос, чей ответ определяет первый инженерный выбор, другими словами «двигатель переменного или постоянного тока»?
Вместо этого мы задаем вопрос, чей ответ определяет первый инженерный выбор, другими словами «двигатель переменного или постоянного тока»?
Стоит отметить, что этот выбор касается только типа питания двигателя, даже до выбора точного технологического решения. Фактически тип источника питания определяет некоторые важные конструктивные характеристики привода и, следовательно, влияет на тип его использования и относительные характеристики.
Попробуем же тогда дать ответ на вопрос: переменный ток или постоянный?
Большие, массивные и мощные, они являются наследием эпохи, когда регулирование, ожидающее будущих методов ШИМ, было возможно только в системах постоянного тока.
В частности, наиболее эффективные структурные типологии двигателей постоянного тока предусматривали возможность независимого регулирования напряжения и тока возбуждения (т. е. обмотки статора, когда она используется вместо постоянных магнитов), а также напряжения и тока якоря (то есть обмотка). С конфигурациями, подобными описанной выше (называемой с независимой регулировкой), можно было получить определенные рабочие кривые для каждого типа приложения.
Своевременно регулируя, например, величины напряжения и тока, можно было получить ситуации, в которых крутящий момент был максимальным при пуске с места, а затем уменьшался почти линейно с увеличением скорости. Это были (и до сих пор) типичные требования к накопителям. Однако, помимо практических ситуаций, мы анализируем, каковы преимущества и недостатки, связанные с использованием этого типа двигателя.
Щетки и искры
Конструктивно все двигатели постоянного тока имеют фазный ротор; ясно, что для поддержания постоянного направления вращения необходимо подавать ток якоря так, чтобы создаваемое магнитное поле всегда взаимодействовало в одном и том же направлении с магнитным полем статора; однако, поскольку ротор вращается на собственном валу, магнитное взаимодействие между магнитным полем ротора (подвижное вращающееся) и магнитным полем статора (фиксированное) меняет направление каждые 180°; двигатель постоянного тока, питаемый таким образом, вместо того, чтобы вращаться, фактически будет колебаться между положением 0 ° и положением 180 °. Распространяя рассуждения на каждую долю угла, мы приходим к выводу, что часть обмотки ротора, которая должна питаться в каждой части угла, отличается от части предыдущей доли и от части последующей доли.
Распространяя рассуждения на каждую долю угла, мы приходим к выводу, что часть обмотки ротора, которая должна питаться в каждой части угла, отличается от части предыдущей доли и от части последующей доли.
Таким образом, в двигателях постоянного тока обмотка ротора фактически состоит из многих секций, и каждая из них питается в течение определенной части угла скругления.
Вал ротора двигателей постоянного тока при этом всегда снабжен кольцом, разделенным на продольные участки, изолированные друг от друга, каждая пара которых действует как контактная клемма для участка обмотки якоря.
Поскольку ротор вращается, источник питания ротора, обеспечиваемый скользящими контактами (щетками), последовательно питает различные секции обмотки ротора, поддерживая постоянное и максимальное взаимодействие между магнитными полями.
Следовательно, двигатели постоянного тока подразумевают несколько переключений цепей при их вращении; мы даже можем утверждать, что чем выше число переключений (т. е. чем больше дробится обмотка ротора), тем больше двигатель обеспечивает постоянный крутящий момент, соответствующий самому высокому, который может быть обеспечен. К сожалению, каждое переключение требует, чтобы щетки разомкнули цепь и немедленно замкнули следующую, а это означает образование искры, которая сама по себе является источником радиоэлектрических помех; такие помехи, зависящие от мощности двигателя и скорости вращения, также могут иметь существенное значение и препятствовать работе других смежных электронных частей или влиять на них. К этому проблемному аспекту затем присоединяются затраты на простои машин, обусловленные необходимым периодическим техническим обслуживанием из-за износа скользящих контактов.
е. чем больше дробится обмотка ротора), тем больше двигатель обеспечивает постоянный крутящий момент, соответствующий самому высокому, который может быть обеспечен. К сожалению, каждое переключение требует, чтобы щетки разомкнули цепь и немедленно замкнули следующую, а это означает образование искры, которая сама по себе является источником радиоэлектрических помех; такие помехи, зависящие от мощности двигателя и скорости вращения, также могут иметь существенное значение и препятствовать работе других смежных электронных частей или влиять на них. К этому проблемному аспекту затем присоединяются затраты на простои машин, обусловленные необходимым периодическим техническим обслуживанием из-за износа скользящих контактов.
Переменный ток: без помех
Двигатели переменного тока в подавляющем большинстве случаев не нуждаются в скользящих контактах, поскольку ротор не намотан; в приводах этого типа магнитное поле подвижной части создается за счет индукции непосредственно одной из частей, закрепленной на своего рода «виртуальной» обмотке ротора, существующей благодаря своей конструктивной форме, называемой «беличьей клеткой».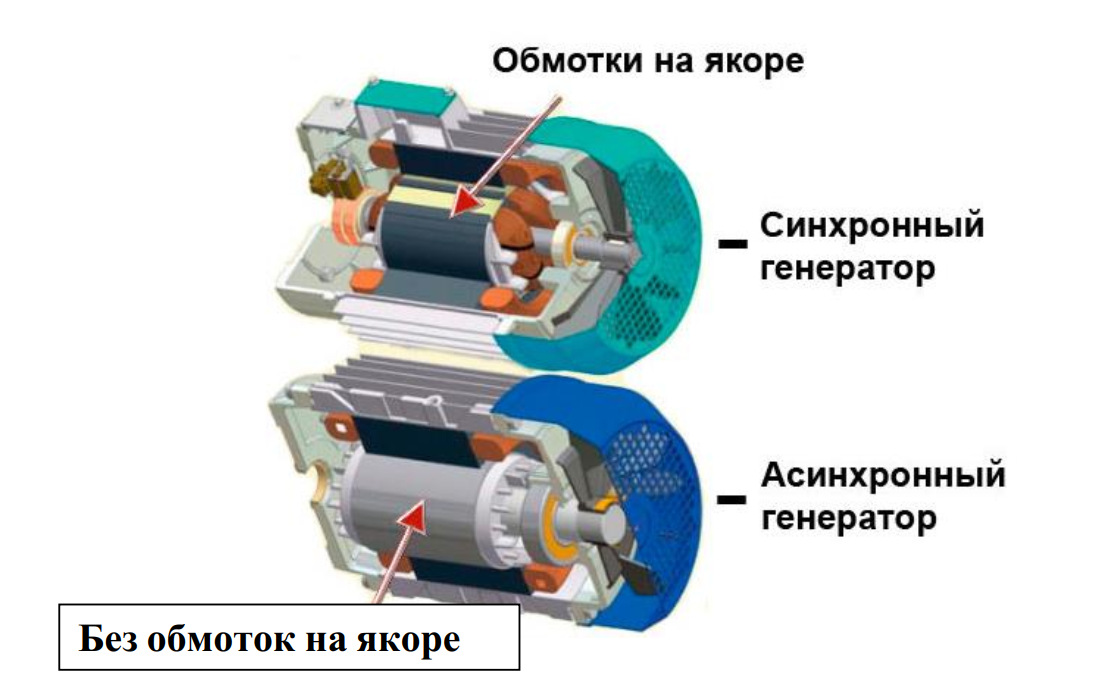
Просто для сведения, в технической литературе эти двигатели называются по-разному, в том числе «асинхронные двигатели», «асинхронные двигатели», «двигатели с короткозамкнутым ротором», а также, естественно, с явными ссылками на белки.
Отсутствие щеток и, как следствие, искрообразование отменяет все требования по техническому обслуживанию, предъявляемые к двигателям постоянного тока, ограничивая вмешательства по сбросу простой заменой изношенных подшипников. Кроме того, будучи конструктивно намного проще, чем двигатели постоянного тока, двигатели переменного тока обеспечивают немаловажное преимущество низких инвестиционных затрат.
С другой стороны, этот тип двигателей сильно страдает от пуска с места, требуя даже в десять раз большего пускового тока, чем номинальный. Если не принять меры, это явление вызывает сильный перегрев, который во многих случаях может быть даже смертельным для двигателя. Двигатели переменного тока, используемые в конкретных ситуациях, когда не происходит частых остановок или замедлений, нуждаются в своевременном охлаждении, дополнительной вентиляции и/или соответствующем увеличении размеров.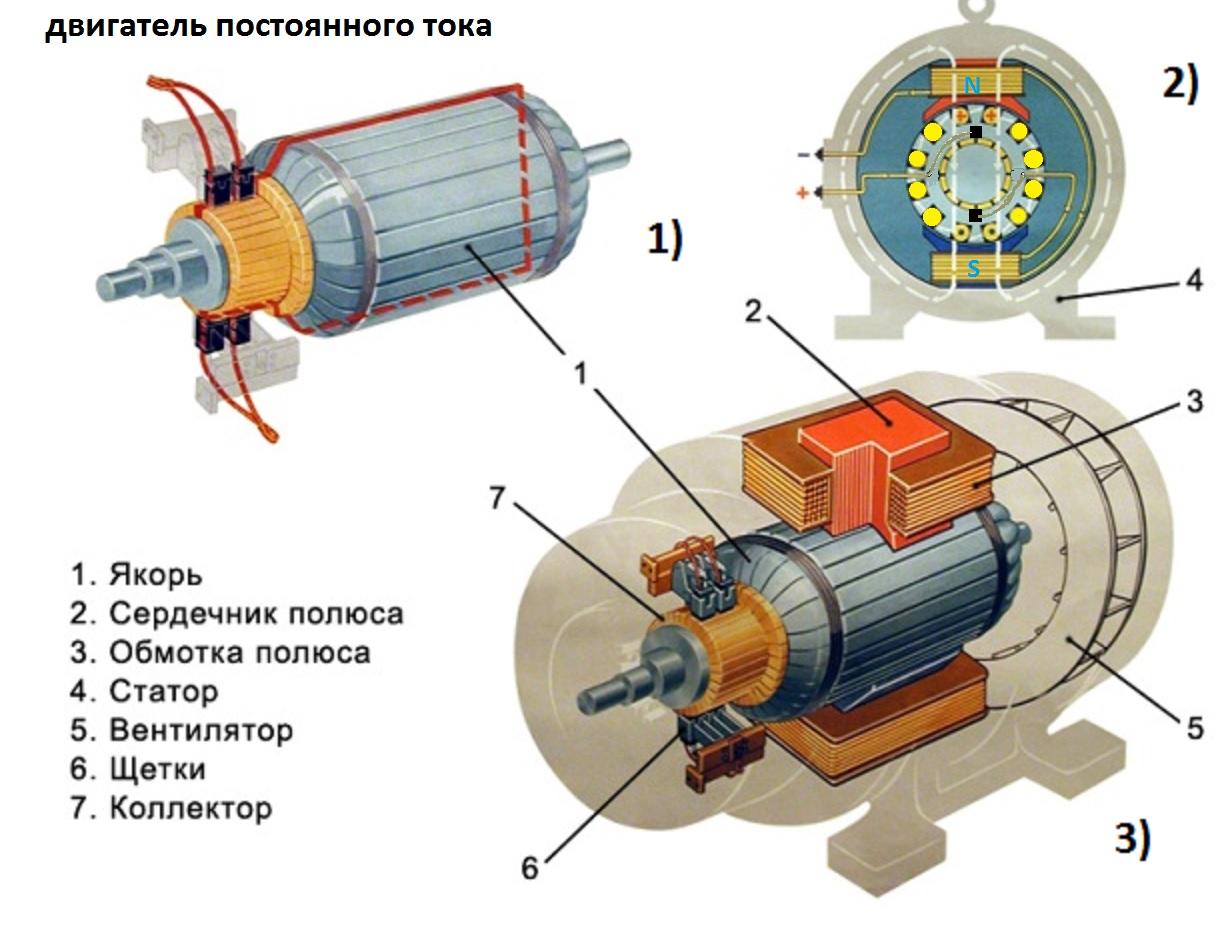
Они не являются линейными элементами, и это еще более важная характеристика двигателей переменного тока: создаваемый ими крутящий момент не является линейной функцией какой-либо значительной величины (напряжения, тока, скорости вращения и т. д.), а имеет флуктуирующую тенденцию в номинальный рабочий диапазон, с одним пиком при скорости вращения, приближающейся к максимально допустимой. Это означает, что асинхронные двигатели подвержены серьезным проблемам с регулированием скорости вращения, и, кроме простых приложений ВКЛ-ВЫКЛ (например, насос или конвейерная лента), все асинхронные двигатели переменного тока сегодня находят широкое применение в приложениях движения, только если они управляются своевременная электроника (инвертор), способная линеаризовать свою рабочую кривую, т. е. сделать передаваемый крутящий момент постоянным.
Бесколлекторный лучше
Несколько лет назад кому-то пришла в голову идея объединить преимущества двигателей постоянного тока с преимуществами двигателей переменного тока: возможность поддержания максимального крутящего момента во всем диапазоне скоростей, раскручивание ротора и, следовательно, отсутствие скользящие контакты, возможность запуска и перезапуска без повреждений из-за перегрева, удобная регулировка скорости.
Новый класс двигателей с большим прагматизмом был назван «бесщеточными», то есть «безщеточными», т.е. без скользящих контактов.
Технические и функциональные характеристики приводов этого класса действительно примечательны: практически постоянный крутящий момент во всем диапазоне скоростей, раскрученный ротор, возможность постоянного изменения скорости без заметной потери крутящего момента, возможность частых остановок и перезапусков.
Так как в любом двигателе вращение происходит за счет взаимодействия магнитных полей статора и ротора, то если в бесколлекторных типах ротор не намотан, значит, он должен быть в чем-то магнитным; ротор, по сути, состоит из мощных постоянных магнитов, тогда как в статоре (с питанием) создается вращающееся магнитное поле, которое «тащит» ротор.
Для обеспечения высокого крутящего момента магнитные поля должны быть очень интенсивными; статор может быть выполнен соответствующими значениями тока, тогда как для ротора важно качество постоянных магнитов, которые, чтобы соответствовать ситуации, изготавливаются из специальных материалов. Это объясняет одну из причин более высокой стоимости бесщеточного двигателя по сравнению со стандартным асинхронным двигателем.
Это объясняет одну из причин более высокой стоимости бесщеточного двигателя по сравнению со стандартным асинхронным двигателем.
Для достижения равномерного вращения и всегда максимально возможного крутящего момента внутри бесщеточных двигателей всегда размещается датчик углового положения ротора, который обеспечивает обратную связь с контроллером о том, как генерировать магнитное поле статора.
Такой датчик может быть дискретного типа, т. е. способным распознавать только конечное число угловых положений, или аналоговым, способным предоставлять разную информацию для каждого распознаваемого угла в соответствии с его разрешающей способностью.
Поскольку для дискретного датчика ничего не меняется во всей угловой части, заключенной между двумя различимыми положениями, этот тип бесщеточного двигателя питается от постоянного тока; вместо этого двигатели, оснащенные аналоговыми датчиками, питаются синусоидальным переменным током, где изменение углового положения соответствует эквивалентному изменению напряжения питания.
Очевидно, что более высокое разрешение обеспечивает лучшую однородность подачи крутящего момента.
Энергоэффективность
Двигатель представляет собой объект, состоящий из двух частей: статора, который точно «стоит», заодно с фиксирующей поверхностью, и ротора, который именно «вращается» внутри статора.
Всем ясно, что ускорить или замедлить предмет значит победить его инерцию; тогда так же ясно, что инерция зависит от массы (для подтверждения достаточно попробовать толкнуть сначала велосипед, а потом грузовик). Ну а в двигателях с ненамотанным ротором масса ротора ограничена и то с малой инерцией. Все это приводит к значительной экономии энергии, поскольку вся подводимая энергия используется для создания крутящего момента, а не для преодоления механической инерции, как это происходит в двигателях постоянного тока. Не только: низкая инерция означает также высокую динамику, то есть производительность при быстром изменении скорости, что в современных промышленных машинах невозможно.