Содержание
Доставка модернизированного актуатора сцепления для Toyota с установкой за 30 минут
Как происходит продажа и доставка актуатора?
Барнаул
Белгород
Брянск
Владивосток
Владимир
Волгоград
Воронеж
Екатеринбург
Ижевск
Иркутск
Казань
Калининград
Кемерово
Краснодар
Красноярск
Курган
Нижневартовск
Нижний Новгород
Новосибирск
Омск
Оренбург
Пенза
Пермь
Ростов-на-Дону
Самара
Санкт-Петербург
Саратов
Ставрополь
Сургут
Тверь
Томск
Тула
Тюмень
Ульяновск
Челябинск
- Все города
Заполненный жидкостью полимер стал актуатором для мягких роботов
Инженеры из Китая разработали электрофлюидный актуатор
для мягких роботов, для работы которого требуется только источник высокого
напряжения и не нужны ни насосы, ни система трубопроводов. Он состоит из мягкого
Он состоит из мягкого
полимерного материала с герметичной полостью, заполненной диэлектрической
жидкостью, в которую погружен электрод. Сильное электрическое поле вокруг находящегося
под высоким напряжением электрода индуцирует потоки жидкости внутри замкнутого объема актуатора, что приводит к его деформации. Инженеры продемонстрировали
возможность создания актуаторов, действующих как в продольном, так и в поперечном
направлении. К примеру, один из работающих на поперечный изгиб актуаторов под действием напряжения 16 киловольт отклонился на угол более 35 градусов за 197 миллисекунд. Для демонстрации практического применения инженеры
создали дистанционно управляемую модель робоската, которая развила скорость около 0.13 длин тела в секунду. Статья опубликована в журнале Science Advances.
Инженеры давно работают над созданием роботов из мягких материалов, которые
подходят для выполнения задач, требующих осторожного обращения с окружением и
человеком, например, для применения в области медицины. Кроме этого, роботы из мягких материалов
Кроме этого, роботы из мягких материалов
могут обладать большим числом степеней свободы, что позволяет им подстраиваться
под сложный рельеф или форму предмета, с которым они взаимодействуют. К примеру,
гибкое робощупальце,
разработанное австралийскими инженерами, легко захватывает и крепко удерживает
объекты сложной формы, обвиваясь вокруг них.
Ключевой проблемой в этой области остается способ актуации, то есть метод с
помощью которого робот или его отдельные части приводятся в движение. В случае
мягких роботов актуация происходит за счет деформации самих актуаторов, что обычно достигается
применением пневматики или гидравлики как наиболее простых способов. Однако в
этом случае в конструкции должны быть нагнетающие давление насосы и системы
трубопроводов для подачи воздуха или жидкости, что приводит к увеличению веса и
объема устройства.
Китайские инженеры под руководством Вэй Тана (Wei Tang) из Чжэцзянского
университета в Ханчжоу разработали мягкий электрофлюидный актуатор, в работе
которого применяется жидкость, но который при этом не требует дополнительного
громоздкого оборудования типа насосов и трубопроводов для передачи давления.
Актуатор изготавливается из гибкого полимерного материала, например силикона, и содержит внутри
себя полость, заполненную диэлектрической жидкостью. Внутрь этого эластичного «пакета» с жидкостью помещается электрод, например вольфрамовый стержень. Вторым
электродом служит окружающая снаружи актуатор вода, или нанесенный на внешнюю
сторону проводящий состав, содержащий углерод, если актуатор находится в
воздушной среде.
Высокое напряжение, поданное на электрод внутри актуатора, создает вокруг него сильное неоднородное электрическое поле, которое приводит
к процессу диссоциации и возрастанию концентрации свободных ионов в жидкости (эффект Вина).
Это в свою очередь приводит к сильному градиенту пространственного заряда, уменьшающемуся
с увеличением расстояния от электрода, и возникновению потока жидкости в
направлении от заряженного стержня. Образовавшийся поток жидкости
приводит к возрастанию давления в замкнутом «кармане» актуатора и его
растягиванию.
Эффект зависит от приложенного напряжения и исчезает после выключения поля. Также
Также
на генерируемый поток жидкости и величину растяжения, а следовательно, и на
эффективность актуации, влияет материал, из которого изготовлен электрод,
глубина его погружения в полость и тип диэлектрической жидкости. Наилучшего
результата разработчики смогли добиться с вольфрамовым электродом, погруженным в
раствор гидрогеля в триацетине.
Для того чтобы изучить характеристики получившегося актуатора, инженеры подвесили
его, закрепив с противоположного конца груз, и стали подавать высокое напряжение с разной частотой и формой импульсов. Как оказалось, предварительная
преднагруженность также влияет на эффективность работы. Это связано с тем, что растяжение
актуатора приводит к уменьшению расстояния между положительным и отрицательным
электродами, повышая напряженность поля. При напряжении 16 киловольт под
нагрузкой 300 граммов актуатор растягивается на 24 процента, а при весе груза 350 грамм этот параметр достигает около 37 процентов. Время отклика растягивающегося продольно актуатора на приложенное напряжение составило около 60 миллисекунд в воде и около 52 миллисекунд в воздухе под нагрузкой 300 граммов.
Актуаторы можно объединять вместе. Например, чтобы повысить силу актуации
можно соединить несколько актуаторов параллельно, а для того, чтобы увеличить суммарную
длину, на которую происходит смещение в результате растяжения, их необходимо присоединить
друг к другу последовательно. Объединив параллельно три актуатора, инженеры
построили модель мышцы-антагониста, которая способна привести в движение
небольшой груз весом 10 граммов, закрепленный на конце штанги, имитирующей
конечность.
С помощью предложенной инженерами технологии можно создавать актуаторы, действующие
не только в продольном, но и поперечном направлении. Для этого необходимо,
чтобы верхняя и нижняя половины материала, образующего карман для жидкости, имели
различную жесткость. В этом случае под действием электрофлюидной струи первым
В этом случае под действием электрофлюидной струи первым
делом будет деформироваться более мягкий материал, что приведет к сгибанию актуатора
и отклонению его в сторону более жесткого материала.
Сгибающий актуатор, изготовленный из силикона и полидиметилсилоксановой
мембраны смог отклониться на 35 градусов при напряжении 16 киловольт на электроде
за время около 197 миллисекунд. Используя два таких актуатора, инженеры
продемонстрировали возможность их практического применения, создав дистанционно
управляемую модель робоската, развивающего скорость около 0.13 длин тела в
секунду.
Помимо преимуществ, таких как компактность и высокая скорость работы, авторы
отметили также и существующие недостатки новых электрофлюидных актуаторов. Например, помимо
очевидного несоответствие материала вольфрамового электрода концепции мягкости,
он может стать причиной прокола и разгерметизации внутреннего пространства с
жидкостью. В этом случае создаваемое давление приведет к выкачиванию жидкости из рабочей полости через прокол. Эта проблема может быть устранена выбором другого материала для
Эта проблема может быть устранена выбором другого материала для
внутреннего электрода. Кроме этого, существует риск электрического пробоя диэлектрического материала
актуатора при излишнем сближении стенок мембран, образующих карман с высоковольтным электродом, во время работы или при внешнем воздействии. В
будущем разработчики планируют разработать метод защиты областей оболочки,
расположенных вблизи электрода, а также продолжить поиск жидкости, реагирующей на другие методы воздействия, например магнитное поле или облучение светом.
Ранее мы рассказывали об американских инженерах, которые разработали роботекстиль, формой которого можно управлять. В основе лежит процесс испарения при нагревании и процесс конденсации при охлаждении жидкости, заполняющей герметичные полости внутри текстиля.
Андрей Фокин
Нашли опечатку? Выделите фрагмент и нажмите Ctrl+Enter.
Сервопривод RDrive как роботизированный привод
Возможные применения серводвигателей многочисленны и могут быть найдены в игрушках, радиоуправляемых моделях, автомобилях и коммерческих самолетах. В Rozum Robotics мы также изучаем использование серводвигателей в качестве исполнительных механизмов роботов, используя их способность обеспечивать точное управление движением.
В Rozum Robotics мы также изучаем использование серводвигателей в качестве исполнительных механизмов роботов, используя их способность обеспечивать точное управление движением.
Зачем роботам нужен серводвигатель
Подобно человеческому телу, роботизированные звенья и роботизированные суставы образуют скелет робота. Серводвигатели — это мышцы, которые двигают и вращают звенья и суставы робота, чтобы изменить положение и движение машины.
В отличие от обычного двигателя, который вращается непрерывно и останавливается только тогда, когда мы его выключаем, серводвигатель может остановиться в любом необходимом положении и удерживать его до получения следующей команды. Благодаря встроенному механизму обратной связи сервоприводы полностью автономны, что позволяет реализовать управление скоростью и углом в манипуляторе робота или роботизированной руке.
Обладая высокой повторяемостью, привод робота поддерживает точность движений робота на протяжении многочисленных рабочих циклов. Энергоэффективные и простые в обслуживании серводвигатели позволяют снизить затраты на эксплуатацию и обслуживание робота.
Энергоэффективные и простые в обслуживании серводвигатели позволяют снизить затраты на эксплуатацию и обслуживание робота.
Где приобрести серводвигатель для робота
Исходя из нашего опыта, есть три варианта получения мотора для робота:
1
Поиск по цене
Если вы ищете низкие цены и быструю доставку, вы можете рассмотреть этот вариант . Однако дешевые роботизированные суставы из Азии обычно не рассчитаны на серьезные нагрузки, необходимые для промышленного применения. Также существует риск того, что фактические параметры будут отличаться от заявленных спецификаций.
2
Поиск по качеству
Купите роботизированный привод от признанного европейского или американского производителя. Этот вариант дает вам качественный серводвигатель, но вам придется заказывать большие партии, чтобы избежать длительного ожидания доставки. Если вам нужно всего несколько двигателей для создания прототипа манипулятора робота, вам, возможно, придется подождать полгода! Вы также должны учитывать, что кастомизация значительно увеличит стоимость, в результате чего стоимость заказа составит до 100 000 евро.
3
Сделай сам
Сделай собственный робот-привод. Таким образом, вы можете получить желаемые настройки и качество, но ваши общие расходы могут равняться стоимости 500 стандартных сервоприводов. Вам также придется потратить часы на поиск надежных поставщиков и квалифицированного персонала. Этот вариант потребует от вас больших усилий.
Есть и четвертый вариант — заказать сервопривод RDrive у Rozum Robotics!
Есть и четвертый вариант — заказать сервопривод RDrive у Rozum Robotics!
Сервоприводы RDrive в качестве приводов для роботов
Сервоприводы RDrive в качестве приводов для роботов
Первый роботизированный двигатель RDrive был создан для привода совместного робота Rozum Robotics, который мы полностью спроектировали и построили самостоятельно. Мы были разочарованы качеством дешевых азиатских роботов и не хотели платить за дорогую кастомизацию в Европе. Эти факторы побудили нас взять на себя разработку и создание собственного роботизированного привода.
Сервоприводы
RDrive доступны в различных размерах и обладают следующими основными преимуществами в качестве приводов роботов:
Высокоточное управление
Встроенный контроллер и два энкодера с обратной связью по положению обеспечивают высокоточное управление угловым позиционированием и скоростью движения манипулятора робота или руки робота.
Высокий крутящий момент
Серводвигатели RDrive со встроенной в корпус коробкой передач обеспечивают высокий крутящий момент, увеличивая грузоподъемность робота.
Интеграция с промышленным роботом
Наши приводы достаточно прочны, чтобы их можно было использовать в манипуляторе промышленного робота или роботизированной руке, но при этом компактны и легки, что снижает общую нагрузку на вашу машину.
Быстрое реагирование
Благодаря своей системе движения с замкнутым контуром наши роботизированные приводы могут обеспечивать быстрое реагирование, что является важной возможностью для коллаборативного робота, которому необходимо быстро реагировать на изменяющиеся условия.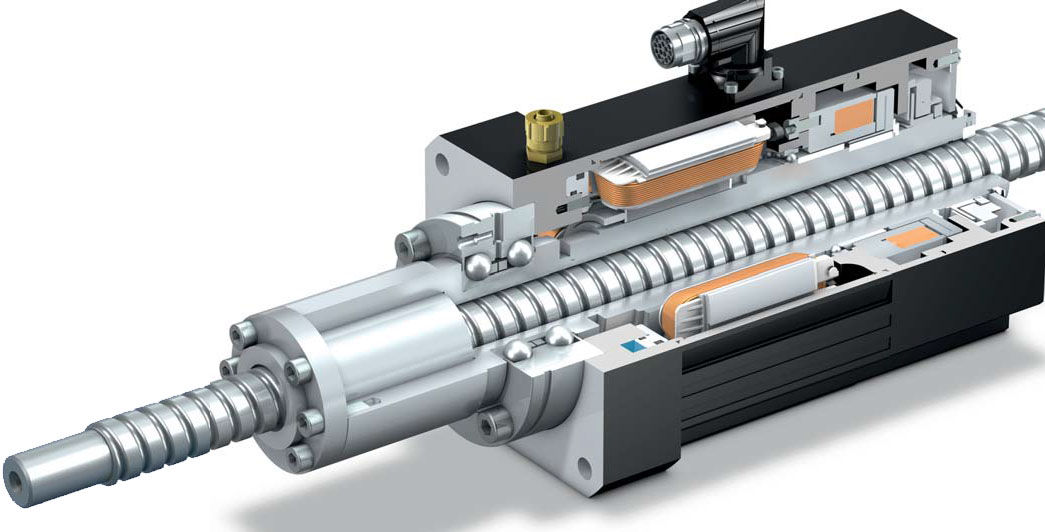
Конструкция с полым валом
Конструкция с полым валом позволяет легко интегрировать их в различные конфигурации роботов: кабели связи проходят внутри корпуса.
Заинтересованы в нашей продукции?
Отправьте запрос на подробное описание роботизированных шарниров RDrive
Отправить сообщение
Блог движения
8 основных причин, по которым производители робототехники выбирают нестандартный двигатель вместо стандартного электродвигателя
Как выбрать лучший двигатель для робота с шарнирной рукой
Разработка двигателей на заказ
Блог робототехники
Роботизированные сварочные аппараты от Rozum Robotics
Рука робота-помощника
Автоматизированные склады: приводы, роботы-манипуляторы и дроны
Кафе Розум
Как выбрать ПО для POS и не облажаться?
Food Tech: шансы и проблемы
Робуста или Арабика ― что лучше?
Запрос коммерческого предложения
Калькулятор ROI
Мы вышлем вам калькулятор ROI для PULSE75 в течение следующих 24 часов.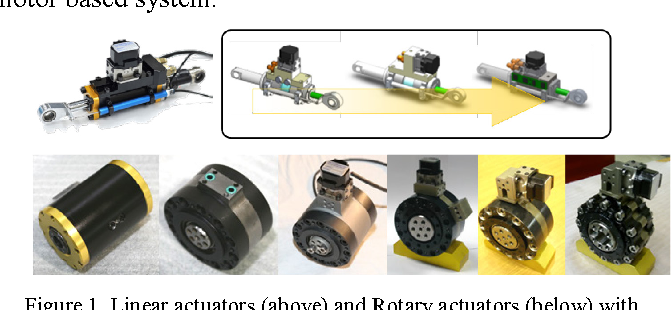
Сила мускулов Индустрии 4.0
Всегда существовала путаница между датчиками и исполнительными механизмами, и иногда они использовались как синонимы друг друга. Однако между ними есть большая разница: датчик преобразует физический параметр в электрический сигнал, а исполнительный механизм делает прямо противоположное преобразование электрического сигнала в физическое движение или действие. Приводы обычно рассматриваются как часть роботизированной экосистемы с растущим спросом на промышленную автоматизацию и более быстрое реагирование на потребности клиентов. Приводы роботов — это те устройства в роботизированной системе, которые вызывают определенные действия, например движение робота с использованием двигателей, движение руки робота для вращения и т. д.
В 1921 году чешский писатель и номинант на Нобелевскую премию Карел Чапек ввел слово «робот» в своей пьесе «Универсальные роботы Россума». Согласно определению Американского института робототехники, робот — это перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специализированных устройств с помощью переменных запрограммированных движений для выполнения различных задач. В этом сценарии те компоненты и электронные устройства, которые обеспечивают движение роботизированных частей, называются исполнительными механизмами роботов.
В этом сценарии те компоненты и электронные устройства, которые обеспечивают движение роботизированных частей, называются исполнительными механизмами роботов.
Ключевыми компонентами роботизированной системы являются блок преобразования энергии, приводы, датчики, контроллер, пользовательский интерфейс и рычажная база. Роботизированные приводы также обычно называют мышцами роботизированной экосистемы, поскольку они создают движение и движение частей робота. Некоторые из распространенных приводов роботов используют комбинацию различных электромеханических устройств, таких как синхронный шаговый двигатель, серводвигатель переменного тока, бесщеточный серводвигатель постоянного тока и щеточный серводвигатель постоянного тока. Эти приводы роботов управляются с помощью контроллера, который обеспечивает необходимый интеллект для управления мобильным роботом. Контроллер используется для обработки сенсорной информации и вычисления управляющих команд для исполнительных механизмов для выполнения заданной задачи.
Предварительное обсуждение приводов роботов
В эпоху эволюции промышленной автоматизации роботы и манипуляторы обладают полной властью для управления автоматизированным производством в различных областях производства. Эти роботы используются на производстве для снижения нагрузки на человека и автоматизации простых и сложных процессов с повышенной точностью. Движение отдельных частей таких механических систем необходимо контролировать, чтобы робот мог эффективно работать для решения всех задач с требуемой точностью.
В Индустрии 4.0 электромеханические системы должны обеспечивать высокую точность позиционирования, плавность движения, безударное выполнение манипуляций и технологических операций. В последнее время эти промышленные роботы являются ключевой технологией для гибких и реконфигурируемых производственных систем и широко используются для выполнения таких задач, как обработка материалов, сварка, сборка, окраска распылением и обслуживание машин.
Промышленный робот-манипулятор в действии
Интересно, что в области биологических наук было проведено много исследований и разработано биологически вдохновленные приводы для миниатюрных роботов. В одном из последних исследований, проведенном группой исследователей из Китая и США, была предложена разработка электростатических пленочных приводов миллиметрового размера, вдохновленных эффективным пространственным расположением мышц насекомых для достижения плотности мощности, подобной мышцам. для обеспечения роботизированных приложений в ограниченном пространстве. Помимо этого исследования, ученые надеются стать свидетелями широкого использования этих биологически вдохновленных приводов в мягких роботах, медицинских роботах, носимых роботах и миниатюрных автономных системах.
Что такое приводы в робототехнике?
Как упоминалось ранее, исполнительный механизм — это устройство, которое вызывает определенные действия, например движение робота, движение манипулятора и т. д. Это движение может быть достигнуто с помощью двигателей — привод необходим для вращения колес робота, манипулятора робота. вращаться, или даже захват робота, чтобы открывать и закрывать. Некоторые из внешних задач, которые роботы должны выполнять там, где необходимы приводы, могут включать включение света, чтобы показать, что робот чего-то достиг, или воспроизведение звука в громкоговорителе, а также общение в той или иной форме.
д. Это движение может быть достигнуто с помощью двигателей — привод необходим для вращения колес робота, манипулятора робота. вращаться, или даже захват робота, чтобы открывать и закрывать. Некоторые из внешних задач, которые роботы должны выполнять там, где необходимы приводы, могут включать включение света, чтобы показать, что робот чего-то достиг, или воспроизведение звука в громкоговорителе, а также общение в той или иной форме.
Роботизированный привод — это электромеханическое устройство, способное реагировать на внешние раздражители и принимать автономные решения или действия для достижения определенной задачи. Роботизированный актуатор считается наиболее важным компонентом робототехнической экосистемы, потому что с актуатором робот не может совершать никаких физических движений. Выбор правильного роботизированного привода для конкретного применения может быть сложной задачей, однако, чтобы упростить ее, необходимо учитывать несколько факторов. Некоторыми из них являются назначение и предполагаемая функциональность, физические требования и ограничения, монтажное пространство, цифровой интерфейс, прочность и мощность, протокол связи и сервоприводы промышленного уровня. Существует три распространенных типа приводов роботов: гидравлические, пневматические и электрические. В следующем разделе мы более подробно рассмотрим все три типа приводов роботов.
Существует три распространенных типа приводов роботов: гидравлические, пневматические и электрические. В следующем разделе мы более подробно рассмотрим все три типа приводов роботов.
Какие существуют три основных типа приводов?
В зависимости от приложения и его развертывания существует три типа приводов роботов. Кроме того, процесс производства этих приводов отличается друг от друга, поскольку они предназначены для совершенно разных областей применения. Роботизированные приводы также подразделяются на два типа в зависимости от требований к движению, таких как линейное движение и вращательное движение. Линейные приводы используются для толкания и вытягивания робота вперед или назад. Соленоидные приводы — это специально разработанные линейные приводы, включающие соленоидную защелку, работающую на электромагнитной активности. В то время как для вращательного движения существует три типа: приводы двигателя постоянного тока, сервоприводы и приводы шагового двигателя. Приводы двигателей постоянного тока используются для вращения роботов, сервоприводы используются для управления и контроля вращательного движения, а приводы шаговых двигателей помогают выполнять повторяющиеся вращательные действия внутри роботов. Вернемся к трем основным типам приводов и обсудим их более подробно.
Приводы двигателей постоянного тока используются для вращения роботов, сервоприводы используются для управления и контроля вращательного движения, а приводы шаговых двигателей помогают выполнять повторяющиеся вращательные действия внутри роботов. Вернемся к трем основным типам приводов и обсудим их более подробно.
Гидравлические роботизированные приводы
Первый тип роботизированного привода — это гидравлический привод, представляющий собой устройство, используемое для преобразования энергии давления жидкости в механическую. Привод включает в себя цилиндр или гидравлический двигатель, который работает за счет гидравлической энергии для механического управления. Выход этого устройства в виде вращательного, линейного или колебательного движения. Принцип работы этого роботизированного привода заключается в том, что он использует для работы давление жидкости вместо давления инструментального воздуха для создания формы. Если жидкость не может быть сжата, устройство использует для этого большую силу.
Пример гидравлического привода робота
Существуют различные типы гидравлических приводов робота: линейные приводы, поворотные приводы и полуповоротные приводы. В первом типе линейных роботизированных приводов устройства используются для линейного приведения в действие, поскольку они обеспечивают движение в пределах прямой линии. Поворотный роботизированный привод используется для вращательного привода, который обеспечивает вращательное движение и может быть достигнуто постоянное угловое движение. Последний, полуповоротный привод используется для частичного угла срабатывания, поскольку он способен обеспечить несколько оборотов, но вращательное движение менее 360 градусов.
Преимущества и недостатки
Каждое оборудование имеет свои преимущества и недостатки, у гидравлического роботизированного привода их тоже несколько. Вот некоторые из преимуществ гидравлического роботизированного привода –
Конструкция гидравлических приводов очень проста, и они также могут быть недорогими.

Обладают высокими силовыми характеристиками, сохраняя при этом защиту от перегрузок.
Вращающиеся части устройства могут обеспечить быструю смену рабочих моделей и поддерживать стабильное давление и крутящий момент.
Гидравлические роботизированные приводы могут генерировать в 25 раз большую силу по сравнению с пневматическими цилиндрами того же размера.

У гидравлического роботизированного привода также есть несколько недостатков, вот некоторые из них:
Эти устройства негибкие и не дают большого контроля пользователю, и их нельзя модифицировать в процессе изготовления.
Гидравлические приводы требуют тщательного обслуживания и чувствительны к температуре.
Эффективность работы устройства низкая по сравнению с другими.
Чтобы заставить его работать, им требуется несколько взаимодополняющих частей, таких как резервуар для жидкости, насос, двигатель, теплообменники и выпускные клапаны.

Пневматический роботизированный привод
Как и гидравлические роботизированные приводы, пневматические приводы — это устройства, преобразующие энергию сжатого воздуха или газа в механическое движение. Они используются для управления автоматизацией, чтобы уменьшить взаимодействие человека со сложными внутренними системами, и могут быть полезны для промышленной автоматизации и аварийных остановов производственных предприятий. Движение этих пневматических роботизированных приводов может быть линейным или вращательным в зависимости от конструкции и требований пользователя. Эти устройства включают внешнее сжимающее усилие, такое как сжатый воздух или газ, для перемещения поршня вдоль внутреннего полого цилиндра и создания давления.
Пример пневматического роботизированного привода
Поворотные пневматические роботизированные приводы отличаются от линейных приводов конструкцией, так как вместо линейного движения создается крутящий момент. Пневматические приводы промышленного класса обеспечивают давление от 80 до 100 фунтов на квадратный дюйм и могут использоваться для перемещения малых и больших грузов, например, для управления заслонками, впускными лопатками, жалюзи, клапанами, регуляторами турбин, гидравлическими приводами и некоторыми другими. итоговые элементы управления. Работа этих роботизированных приводов очень проста — они используют сжатый газ или сжатый воздух, который поступает в камеру, где создается давление. Как только это давление превышает требуемый уровень давления по сравнению с внешним атмосферным давлением, оно создает регулируемое кинетическое движение поршня или шестерни, которое может совершать прямолинейное или круговое механическое движение.
Пневматические приводы промышленного класса обеспечивают давление от 80 до 100 фунтов на квадратный дюйм и могут использоваться для перемещения малых и больших грузов, например, для управления заслонками, впускными лопатками, жалюзи, клапанами, регуляторами турбин, гидравлическими приводами и некоторыми другими. итоговые элементы управления. Работа этих роботизированных приводов очень проста — они используют сжатый газ или сжатый воздух, который поступает в камеру, где создается давление. Как только это давление превышает требуемый уровень давления по сравнению с внешним атмосферным давлением, оно создает регулируемое кинетическое движение поршня или шестерни, которое может совершать прямолинейное или круговое механическое движение.
Преимущества и недостатки
Есть несколько преимуществ и недостатков промышленных пневматических приводов роботов, и вот некоторые из них. Ниже приведены преимущества пневматических приводов:
Некоторые отрасли промышленности предпочитают пневматические приводы другим типам из-за их надежности и стандартов безопасности.
Они не нуждаются в розжиге или электричестве для использования там, где возгорание недопустимо.
Эти устройства могут хранить сжатый газ или сжатый воздух и эффективно использовать их снова без риска возгорания.
Как упоминалось в первом пункте, они являются надежными устройствами благодаря своей исключительной долговечности и, следовательно, снижению затрат на поддержание высокой производительности.

Вот некоторые из недостатков роботизированного привода —
В таких приводных системах могут быть потери давления, а сжимаемость воздуха может сделать эти устройства менее работоспособными, чем другие линейные приводы.
Они должны быть специально изготовлены для конкретного применения, чтобы сохранить размер всей исполнительной системы.
Для эффективной работы им требуется несколько внешних компонентов — клапаны правильного размера, регуляторы и компрессоры — что, в свою очередь, делает систему сложной.
Сжатый воздух и сжатый газ могут быть загрязнены маслом или смазкой, что увеличивает время простоя.

Электроприводы для роботов
Третьим типом роботизированного привода является электрический привод, представляющий собой устройство, которое может создавать движение груза или действие, требующее силы, например зажима. Эти приводы обеспечивают вращательное движение, так как шпиндель двигателя напрямую соединен со спиральным винтом через приводной вал. Если шпиндель вращается, гайка шарико-винтовой передачи перемещается вперед или назад вместе со спиральным винтом. Конструкции электрических роботизированных приводов основаны на конкретной задаче, которую они могут выполнять с помощью процессов, для которых они предназначены.
Пример электрического привода робота
Выбор правильного привода может быть трудной задачей, но для электрических приводов груз должен перемещаться на определенное расстояние, которое определяет ход привода. Электрический привод может использоваться для нескольких положений, поэтому требуемый ход должен учитывать общее перемещение. Существуют различные типы электроприводов — стержневые или бесштоковые, с двигателями и приводами или без них. Для этих приводов требуется подходящее электропитание, и важна соответствующая проводка к оборудованию.
Электрический привод может использоваться для нескольких положений, поэтому требуемый ход должен учитывать общее перемещение. Существуют различные типы электроприводов — стержневые или бесштоковые, с двигателями и приводами или без них. Для этих приводов требуется подходящее электропитание, и важна соответствующая проводка к оборудованию.
Преимущества и недостатки
Даже у этого типа роботизированного управления есть несколько преимуществ и недостатков, однако мы обсудим лишь некоторые из них. В следующем списке представлены преимущества электрических приводов роботов:
Электрические приводы легче интегрируются, чем гидравлические и пневматические приводы, и некоторые из них поставляются с программируемыми контроллерами и микропроцессорами для управления операцией.
Электрические актуаторы имеют высокий уровень точности в управлении движением благодаря включению крутящего момента, скорости и усилия.
Безопасность и удобство этих приводов лучше, чем у их аналогов. Они не подвержены загрязнению или утечке.
Эти устройства могут стоить меньше, поскольку они требуют меньшего обслуживания, просты в эксплуатации и установке и отличаются повышенной прочностью.

Ниже приведены недостатки электрического роботизированного привода—
Электрические приводы имеют более высокую начальную стоимость оборудования и не являются взрывозащищенными.
Эти устройства чувствительны к вибрациям и имеют более сложную технологию конструкции.
Если у них большая тяга, у них меньше скорость срабатывания.
Какой тип привода чаще всего используется в робототехнике?
Обычно используемый роботизированный привод постоянного тока
Существует бесконечное множество типов приводов, которые используются в роботизированных системах, однако в этом подразделе статьи мы рассмотрим некоторые из распространенных приводов, которые используются в повседневной жизни. . Ниже приведен список пяти типов приводов, используемых в роботизированных системах промышленной автоматизации — 9.0003
. Ниже приведен список пяти типов приводов, используемых в роботизированных системах промышленной автоматизации — 9.0003
Электродвигатель постоянного тока. Электродвигатель является широко используемым исполнительным механизмом в любой роботизированной системе и изготавливается в различных размерах и с различной мощностью генерирования крутящего момента. Действия, в которых они могут быть развернуты, — это роботизированное бурение, движение роботизированной трансмиссии, выполняемое с использованием приводов двигателей постоянного тока.
Сервоприводы — серводвигатели также являются частью приводов вращательного движения, которые часто производят вращение на 360 градусов, однако непрерывное вращение не является обязательным. Он допускает остановки во время вращательного движения для обеспечения частичного вращения.
Приводы шаговых двигателей — они способствуют повторяющимся вращательным движениям в роботах, где требуется повторяемость действий.
Линейные актуаторы. В этой базовой форме линейного роботизированного актуатора линейное срабатывание запускает толкающее и тянущее движение робота. Существуют также разгибания рук, при которых действия запускаются линейным движением. Активный конец этого привода соединен с плечом рычага робота, чтобы вызвать такое движение.
Соленоидные приводы. В соленоидных приводах специального назначения они оснащены соленоидной защелкой, которая воздействует на электромагнитную активность и используется для управляемого движения.

Ключевые выводы
Роботизированный привод — это электромеханическое устройство, которое вызывает определенные действия (физическое движение) в экосистеме роботов.
Приводы роботов в основном бывают трех типов: гидравлические, пневматические и электрические приводы.
Существует два типа приводов роботов, основанных на движении: линейный привод робота и вращательный привод робота.
Гидравлический привод робота преобразует энергию давления жидкости в механическую энергию.
Пневматический привод преобразует энергию сжатого воздуха или газа в механическое движение.
Электропривод представляет собой механическое устройство, используемое для преобразования электричества в кинетическую энергию при линейном или вращательном движении
Активация робота необходима для правильного взаимодействия между окружающей средой и телом робота.
Роботизированные приводы в мягких роботах могут иметь масштаб от микрометра до сантиметра и больше.
Мягкие приводы основаны на полимерах, жидкостях, бумаге, неорганических материалах или даже на гибридных материалах, объединяющих биологические клетки.
Из-за большого количества приводных материалов и стимулов не существует стандартного протокола, которому следует следовать при характеристике мягких приводов.

