Содержание
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса / Хабр
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
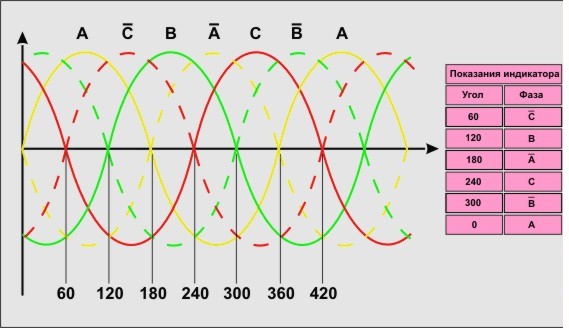
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1).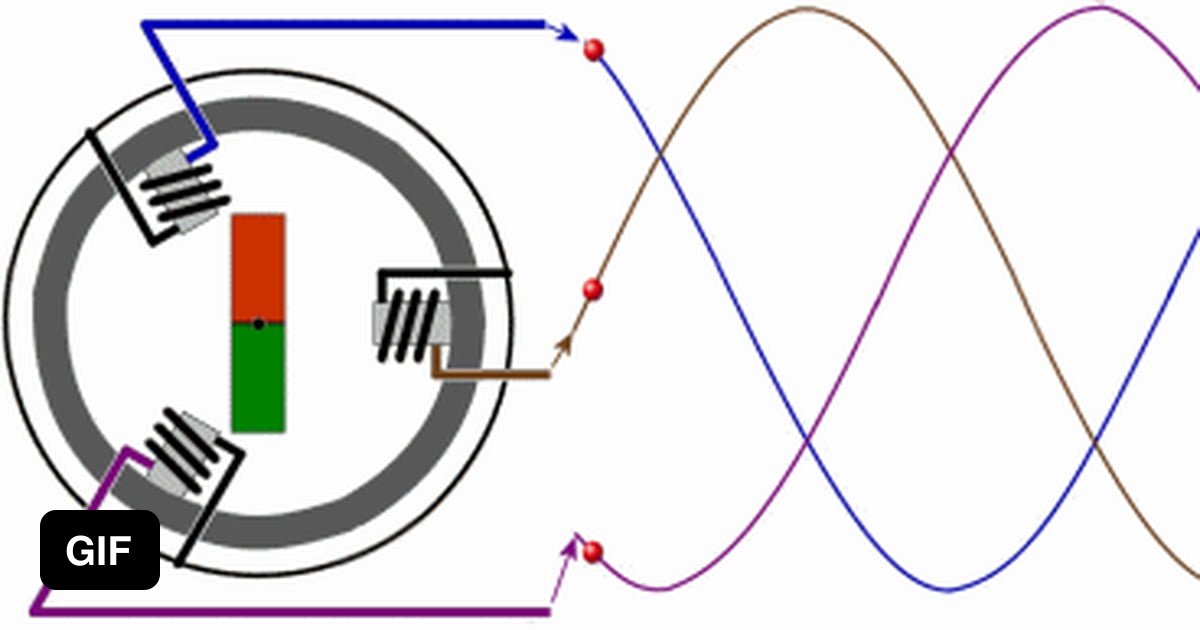 Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Рисунок 2. Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
а. б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).
Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.
Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.
Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Огибающая сигнала при изменении скважности ШИМ.
Схема со средней точкой
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.
Рисунок 26. Напряжение после делителя и фильтра низких частот.
Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.
Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Рисунок 2. Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.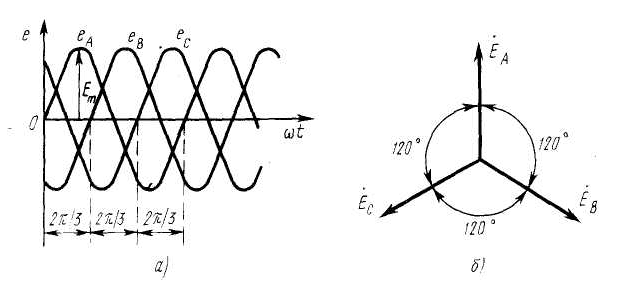
Электрический период будем отсчитывать от первого вектора.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
а.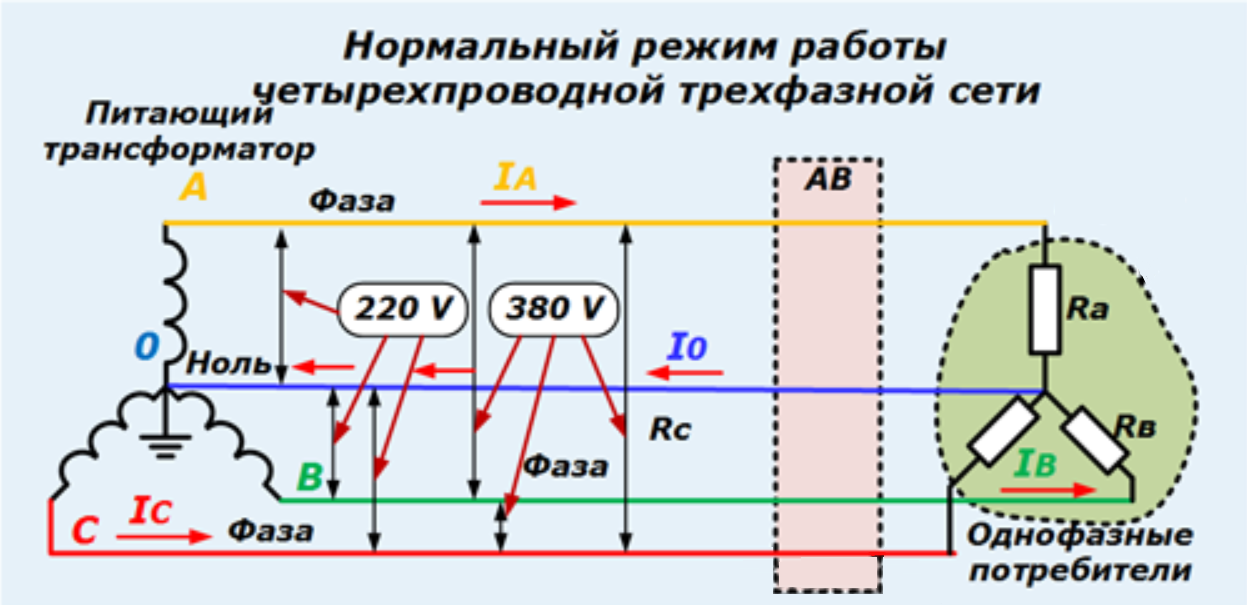 б.
б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).
Рисунок 16. Вид сигнала с датчиков Холла.
Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.
Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.
Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Огибающая сигнала при изменении скважности ШИМ.
Схема со средней точкой
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.
Рисунок 26. Напряжение после делителя и фильтра низких частот.
Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.
Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Автор: Woofer46
Источник
Описание однофазной и трехфазной системы
Хотите создать сайт? Найдите бесплатные темы и плагины WordPress.
В этом руководстве рассматриваются однофазные и трехфазные системы, а также соединения звездой (звездой) и треугольником. Также подробно обсуждаются преимущества трехфазной системы и процесс синхронизации.
Генератор переменного тока может быть спроектирован для выработки однофазного или многофазного напряжения переменного тока. На рисунке 1 показаны основные конфигурации, используемые для создания однофазного, двухфазного и трехфазного напряжения переменного тока.
Катушка или катушки статора обеспечивают выходное напряжение и ток, а ротор фактически представляет собой вращающийся электромагнит, обеспечивающий как магнитное поле, так и относительное движение.
Рисунок 1 Генерация однофазных и многофазных напряжений.
Однофазная система
Электрическая сеть , поставляемая в жилой дом, обычно состоит из однофазного (1Ø) источника питания с трансформатором с центральным отводом, как показано на Рисунок 2 .
Центральный ответвитель обеспечивает два разных напряжения (120/240 В) от однофазной сети. Этот тип источника питания обычно подходит для большинства осветительных и силовых приборов в доме. Она также известна как однофазная трехпроводная система питания и двухфазная система . Его основное преимущество заключается в том, что он экономит материал проводника по сравнению с несимметричной однофазной системой.
Трансформатор , питающий трехпроводную распределительную систему, имеет однофазную входную (первичную) обмотку. Выходная (вторичная) обмотка имеет средний отвод, а центральный отвод подключен к заземленной нейтрали. Напряжение вторичного трансформатора составляет 120 вольт по обе стороны от центрального ответвления, что дает 240 вольт между двумя проводниками под напряжением.
Рисунок 2 Однофазная трехпроводная система питания.
Для большинства коммерческих и промышленных электроустановок требуются трехфазные распределительные системы . Трехфазный источник питания (3Ø) представляет собой комбинацию трех однофазных напряжений. Однофазное напряжение, подаваемое в жилые дома, по сути является одной из фаз, взятых из трехфазной распределительной системы. По мере увеличения требований к нагрузке использование однофазного питания становится нецелесообразным.
Трехфазная система
Преимущества трехфазной системы:
- По сравнению с эквивалентной однофазной системой трехфазная система передает на 73% больше мощности, но использует только на 50% больше проводов.

- Мощность, выдаваемая однофазным источником, пульсирует, тогда как мощность, выдаваемая трехфазной системой, постоянно относительно постоянна. Это означает, что хотя мощность в каждой фазе пульсирует, общая мощность в любой момент будет относительно постоянной. Следовательно, рабочие характеристики трехфазных машин будут превосходить однофазные устройства с аналогичными параметрами.
- Двигатель или трансформатор могут иметь одинаковые физические размеры, но номинальная мощность трехфазных двигателей в лошадиных силах и мощность трехфазных трансформаторов в киловольт-амперах на 150 % выше, чем у однофазных двигателей и трансформаторов.
- Трехфазная распределительная система может использоваться как для трехфазного, так и для однофазного питания.

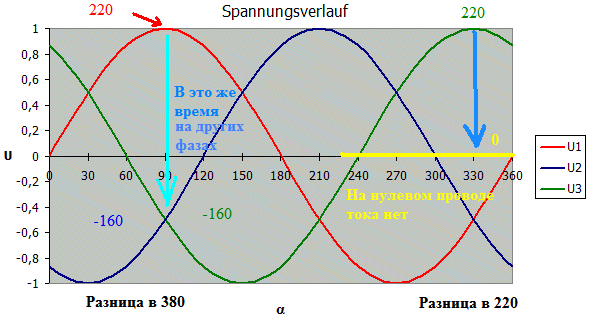
Трехфазный генератор переменного тока содержит три набора катушек, расположенных под углом 120 градусов друг к другу, а его выходное напряжение состоит из трех волн напряжения 120 электрических градусов отдельно. Порядок, в котором эти напряжения следуют друг за другом, называется чередованием фаз или последовательностью фаз.
Порядок, в котором эти напряжения следуют друг за другом, называется чередованием фаз или последовательностью фаз.
Со ссылкой на трехфазную форму волны напряжения, показанную на Рис. Рисунок 3 . Чередование фаз в трехфазной системе. Условия, которые должны быть соблюдены при параллельном подключении трехфазного генератора переменного тока к другому генератору переменного тока или к системе электросети: Рисунок 4 иллюстрирует метод синхронизации генератора переменного тока с трехфазной системой с использованием метода трех темных ламп. Работа процесса синхронизации резюмируется следующим образом: Рисунок 4 Синхронизация генератора. Раньше синхронизация выполнялась вручную с использованием трехлампового метода . Сегодня синхронизация осуществляется более точно в момент синхронизма с помощью синхроскопа . На дисплее синхроноскопа будет указано, есть ли несоответствие скорости/частоты и/или несоответствие напряжения между двумя источниками, включенными параллельно. Поскольку движение синхроноскопа может перемещаться в 360-градусном направлении, при внесении изменений, влияющих на выходную частоту и напряжение, результаты этих изменений можно наблюдать по мере их осуществления. Генераторы коммунальных услуг регулярно подключаются и отключаются от крупной энергосистемы в ответ на запросы клиентов. Такая сеть называется бесконечной шиной, потому что она содержит так много генераторов, по существу соединенных параллельно, что ни ее напряжение, ни ее частота не могут быть изменены. Несоблюдение надлежащих процедур синхронизации может привести к значительным помехам в электрической системе и повреждению обмоток генератора. Генератор трехфазный содержит три набора катушек статора, расположенных под углом 120 градусов друг к другу. На выходе этих катушек три отдельных напряжения с одинаковой частотой и величиной, но с разницей в 120 электрических градусов. Три обмотки генератора соединены так, что для передачи трехфазного напряжения требуется только три или четыре провода вместо шести. Три набора катушек статора трехфазного генератора могут быть соединены звездой (также известной как звезда) или дельта, как показано на рисунке 5 .


Рисунок 5 Соединение генератора переменного тока звездой и треугольником в трехфазной системе
Соединение звездой выполняется путем соединения одного конца каждой из обмоток трехфазного генератора вместе. Рисунок 6 показывает пример напряжений и токов в схеме соединения звездой.
Напряжение и ток через одну обмотку или фазу известны как фазное напряжение (E фаза ) и фазный ток (I фаза ). . Точно так же напряжение между линейными проводами и ток через них известны как линейное напряжение (E , строка ) и линейный ток (I , строка ). Рисунок 6.0008 Проблема: Измерения напряжения и тока, выполненные для трехфазного выхода генератора, соединенного звездой, показывают фазное напряжение 240 вольт и линейный ток 30 ампер. Чему равно линейное напряжение и фазный ток? Решение:
Соединение звездой
В соединении звездой линейный ток и фазный ток одинаковы, поскольку они действуют последовательно:0007 I строка = I фаза . Однако фазное напряжение меньше линейного на коэффициент квадратного корня из 3, что равно 1,73. Это связано с тем, что напряжение каждой фазы имеет 120-градусную задержку или сдвиг, который необходимо учитывать:
Однако фазное напряжение меньше линейного на коэффициент квадратного корня из 3, что равно 1,73. Это связано с тем, что напряжение каждой фазы имеет 120-градусную задержку или сдвиг, который необходимо учитывать:
Или
Трехфазная четырехпроводная система «звезда» очень распространена и является стандартной. система, поставляемая многими энергетическими компаниями коммерческим и промышленным потребителям.
На рисунке 7 показан четырехпроводной генератор переменного тока , соединенный звездой, , способный подавать питание в здание. Он может подавать как однофазное, так и трехфазное питание, а также 208 В и 120 В без использования трансформатора.
Рисунок 7 Трехфазная четырехпроводная система звездой.
Все фазные обмотки соединения треугольником соединены последовательно и напоминают греческую букву треугольник (Δ). Рисунок 8 показывает пример напряжений и токов в конфигурация с подключением по треугольнику. Поскольку фазные обмотки образуют замкнутый контур, может показаться, что через обмотки будет постоянно протекать большой ток, даже если нагрузка не подключена.
Поскольку фазные обмотки образуют замкнутый контур, может показаться, что через обмотки будет постоянно протекать большой ток, даже если нагрузка не подключена.
На самом деле, из-за разности фаз между тремя генерируемыми напряжениями ток в обмотках в условиях холостого хода незначителен или отсутствует.
Рис. 8 В напряжения и токи в конфигурации треугольника в трехфазной системе
Соединение треугольником
При соединении треугольником линейное напряжение и фазное напряжение одинаковы, поскольку они действуют параллельно друг другу: E линия = E фаза . Ток линии и фазный ток различаются. Линейный ток соединения треугольником выше фазного тока в 3 или 1,73 раза. Это связано с тем, что ток каждой фазы имеет 120-градусную задержку или сдвиг, который необходимо учитывать:
Расчет напряжения и тока в примере дельта-подключения
Проблема: Измерения напряжения и тока, взятые для трехфазного, подключенного к дельта-генератору . Каково значение напряжения на каждой фазе и силы тока в каждой фазе?
Каково значение напряжения на каждой фазе и силы тока в каждой фазе?
Решение:
Вопросы для повторения
- Какие два однофазных напряжения доступны в стандартной коммунальной службе?
- Сравните использование однофазных и трехфазных систем в отношении:
- Количество проволоки, необходимое для нагрузки эквивалентного размера.
- Изменение количества энергии, подаваемой на нагрузку.
- Физический размер трехфазных и однофазных двигателей эквивалентной мощности.
- Как чередование фаз влияет на направление вращения трехфазного асинхронного двигателя?
- Какие условия должны быть выполнены при подключении трехфазного генератора переменного тока к системе электросети?
- На сколько градусов друг от друга расположены три катушки статора трехфазного генератора переменного тока?
- Назовите два основных типа соединений катушек статора трехфазного генератора переменного тока.
- Как соотносятся линейные и фазные напряжения и токи для генератора переменного тока, соединенного звездой?
- Как соотносятся линейные и фазные напряжения и токи для генератора переменного тока, соединенного треугольником?
- Измерения напряжения и тока, выполненные для трехфазного генератора переменного тока, соединенного звездой, показывают линейное напряжение 208 вольт и линейный ток 20 ампер. Каково значение фазного напряжения и фазного тока?
- Измерения напряжения и тока, выполненные для трехфазного генератора переменного тока, соединенного треугольником, показывают фазное напряжение 240 вольт и линейный ток 10 ампер. Чему равно линейное напряжение и фазный ток?
Обзор Вопросы – ответы
- 120 В и 240 В.
- (a) Трехфазная система передает на 73 % больше мощности, но использует только на 50 % больше проводов.
- (b) Мощность, выдаваемая однофазным источником, пульсирует, тогда как мощность, выдаваемая трехфазной системой, относительно постоянна.
- (c) Трехфазные двигатели намного меньше по размеру, чем аналогичные однофазные двигатели.
- Если поменять местами две фазы питания трехфазного асинхронного двигателя, двигатель изменит направление вращения.
- Последовательность фаз или чередование машины должны быть такими же, как и в системе. Напряжение генератора должно быть равно напряжению системы. Напряжение генератора должно быть в фазе с напряжением сети. Частота генератора должна быть равна частоте системы.
- 120°
- Уай и Дельта.
- I строка = I фаза , E строка = E фаза x 1,73
- E строка = E фаза , I строка = I фаза x 1,73
- I фаза = 20 А, E фаза = 120 В
- E сеть = 240 В, I фаза = 5,8 А

Вы нашли apk для андроида? Вы можете найти новые бесплатные игры и приложения для Android.
Курсы PDH онлайн. PDH для профессиональных инженеров. ПДХ Инжиниринг.
«Мне нравится широта ваших курсов HVAC; не только экологические курсы или курсы по энергосбережению
.»
Рассел Бейли, ЧП
Нью-Йорк
«Это укрепило мои текущие знания и научило меня нескольким новым вещам, кроме того
познакомив меня с новыми источниками
информации». Я многому научился, и они
очень быстро отвечали на вопросы.
Это было на высшем уровне. Буду использовать
снова. Спасибо».
Блэр Хейворд, P.E.0002 «Веб-сайт прост в использовании. Хорошо организован. Я действительно буду пользоваться вашими услугами снова.
Я передам название вашей компании
другим сотрудникам.»
Рой Пфлейдерер, ЧП
Нью-Йорк
«Справочный материал был превосходным, и курс был очень информативным, особенно потому, что я думал, что уже знаком
с деталями Канзас
Авария в City Hyatt. »
»
Майкл Морган, ЧП
Техас
«Мне очень нравится ваша бизнес-модель. Мне нравится, что я могу просмотреть текст перед покупкой. Я нашел курс
информативным и полезным
в своей работе.» 1
«У вас отличный выбор курсов и статей очень информативный. Вы
— лучшее, что я нашел».
«Я считаю, что такой подход позволяет работающему инженеру легко зарабатывать PDH
материала». «Спасибо, что разрешили мне просмотреть неправильные ответы. На самом деле
человек учится большему
на неудачах». Pennsylvania
«Курс был хорошо составлен, и использование тематических исследований является эффективным
способ обучения.» 91
«Я очень впечатлен тем, как вы представляете курсы; т. е. позволяя
студент должен просмотреть курс
материалы перед оплатой и
получением теста. 091
091
Вирджиния
«Спасибо, что предлагаете все эти замечательные курсы. Я, конечно, многому научился и
получил огромное удовольствие».
«Я очень доволен предлагаемыми курсами, качеством содержания материалов и простотой поиска
онлайн-курсов
.»
Уильям Валериоти, ЧП
Техас
«Этот материал в значительной степени оправдал мои ожидания. Курс был прост для изучения. Фотографии в основном давали хорошее представление о
обсуждаемых темах.»
Майкл Райан, ЧП
Пенсильвания
«Именно то, что я искал. Нужен 1 балл по этике, и я нашел его здесь.»
Джеральд Нотт, П.Е.
Нью-Джерси
«Это был мой первый онлайн-опыт получения необходимых кредитов PDH. Это было
информативно, выгодно и экономично.
Я настоятельно рекомендую это
всем инженерам.»
Джеймс Шурелл, P.E. 03
«Я ценю, что вопросы относятся к «реальному миру» и имеют отношение к моему практика, и
не основаны на каком-то неясном разделе
законов, которые не применяются
до 9009 1 «нормальная» практика».
Марк Каноник, ЧП
Нью-Йорк
«Большой опыт! Я многому научился, чтобы вернуться к своему медицинскому устройству
организации».
Иван Харлан, ЧП
Теннесси
«Материал курса имеет хорошее содержание, не слишком математический, с хорошим акцентом на практическое применение технологий».
Юджин Бойл, ЧП
Калифорния
«Это был очень приятный опыт. до
Использование Многие Спасибо. »
»
Патрисия Адамс, ЧП
Канзас
«Отличный способ добиться соответствия непрерывному обучению физкультуры в рамках временных ограничений лицензиата».
Джозеф Фриссора, ЧП
Нью-Джерси
«Должен признаться, я действительно многому научился. Это помогает распечатать тест во время просмотра текстового материала. I
также оценили просмотр предоставлены
фактические случаи».
Жаклин Брукс, ЧП
Флорида
«Документ Общие ошибки ADA в проектировании помещений очень полезен. Тест
требует исследований в документе
, но 9 0090 ответов были
легкодоступными».
Гарольд Катлер, ЧП
Массачусетс
«Это было эффективное использование моего времени.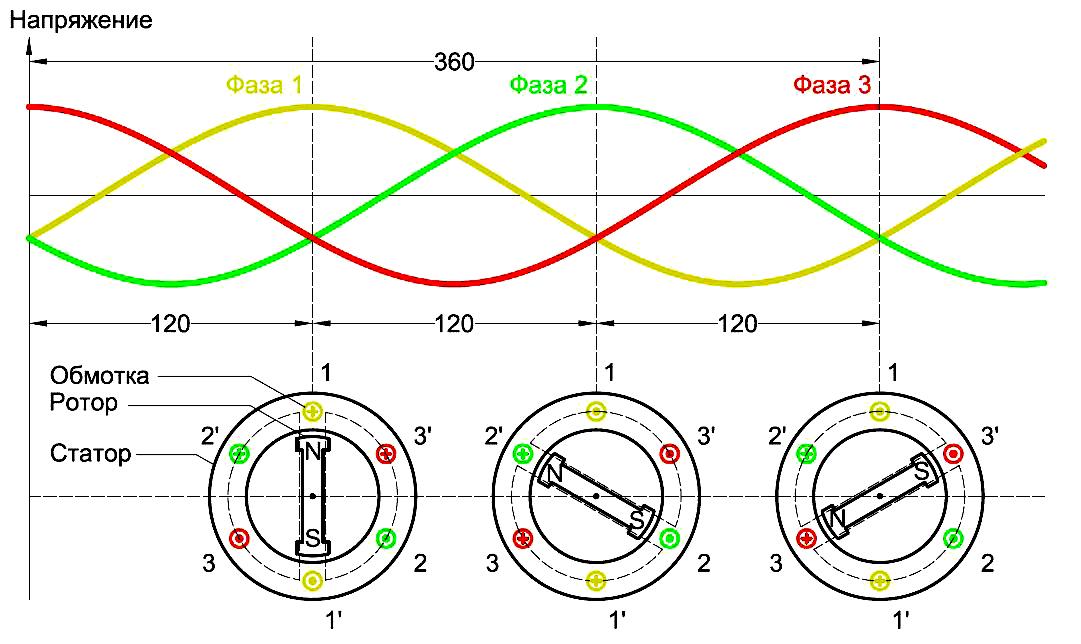 Спасибо за разнообразие выбора
Спасибо за разнообразие выбора
в дорожной инженерии, который мне нужен
для выполнения требований сертификации
PTOE.
Иллинойс
«Очень удобный и доступный способ заработать CEU для моих требований штата Делавэр PG». 2 «Узнал много нового о защитном заземлении. До сих пор все курсы, которые я посещал, были отличными.
Надеюсь увидеть больше 40%
курсы со скидкой.» 002 Нью-Йорк
«Только что сдал экзамен по радиологическим стандартам и с нетерпением жду возможности сдать дополнительные
курсы. Процесс прост, и
намного эффективнее, чем
необходимость путешествовать.0091
Айдахо
«Услуги, предоставляемые CEDengineering, очень полезны для профессионалов
инженеров, желающих приобрести блоки PDH
любые время. Очень удобно. »
»
Пол Абелла, ЧП
Аризона
«Пока все было отлично! Поскольку я постоянно работаю матерью двоих детей, у меня не так много
времени, чтобы исследовать, куда
получить мои кредиты от.»
Кристен Фаррелл, ЧП
Висконсин
900 02 «Это было очень информативно и поучительно. Легко для понимания с иллюстрациями
и графиками; определенно облегчает
усвоение всех
теорий.»
Виктор Окампо, P.Eng.
Альберта, Канада
«Хороший обзор принципов полупроводников.
на метро
на работу .»
Клиффорд Гринблатт, ЧП
Мэриленд
«Просто найти интересные курсы, скачать документы и получить
викторина. Я бы очень порекомендовал бы
Я бы очень порекомендовал бы
всем PE нуждающимся
Единицы CE.» 9000 3
Марк Хардкасл, ЧП
Миссури
«Очень хороший выбор тем во многих областях техники».0 Миссури
«Я заново узнал то, что забыл. Я также рад помочь финансово
по ваш рекламный адрес электронной почты который
сниженная цена
на 40%.
Конрадо Касем, ЧП
Теннесси
«Отличный курс по разумной цене. Буду пользоваться вашими услугами в будущем.»
Чарльз Флейшер, P.E.
Нью -Йорк
«Это был хороший тест и на самом деле проверил, что я прочитал профессиональную этику
Коды и Нью -Мексико
. »
»
Брун Гильберт, Ч.П.
Калифорния
«Мне очень понравились занятия. Они стоили времени и усилий.»
Дэвид Рейнольдс, ЧП
Канзас
«Очень доволен качеством тестовых документов. Воспользуюсь CEDengineerng
, когда потребуются дополнительные
9009 0 сертификация».
Томас Каппеллин, ЧП
Иллинойс
«У меня истек срок действия курса, но вы все равно выполнили обязательство и поставили
мне то, за что я заплатил — много
ценю!» Оклахома
«CEDengineering предлагает удобные, экономичные и актуальные курсы
для инженера». по разумной цене, а материал был кратким и
все хорошо организовано.» 0003
«Вопросы соответствуют урокам, а материал урока
хороший справочный материал
для дизайна под дерево.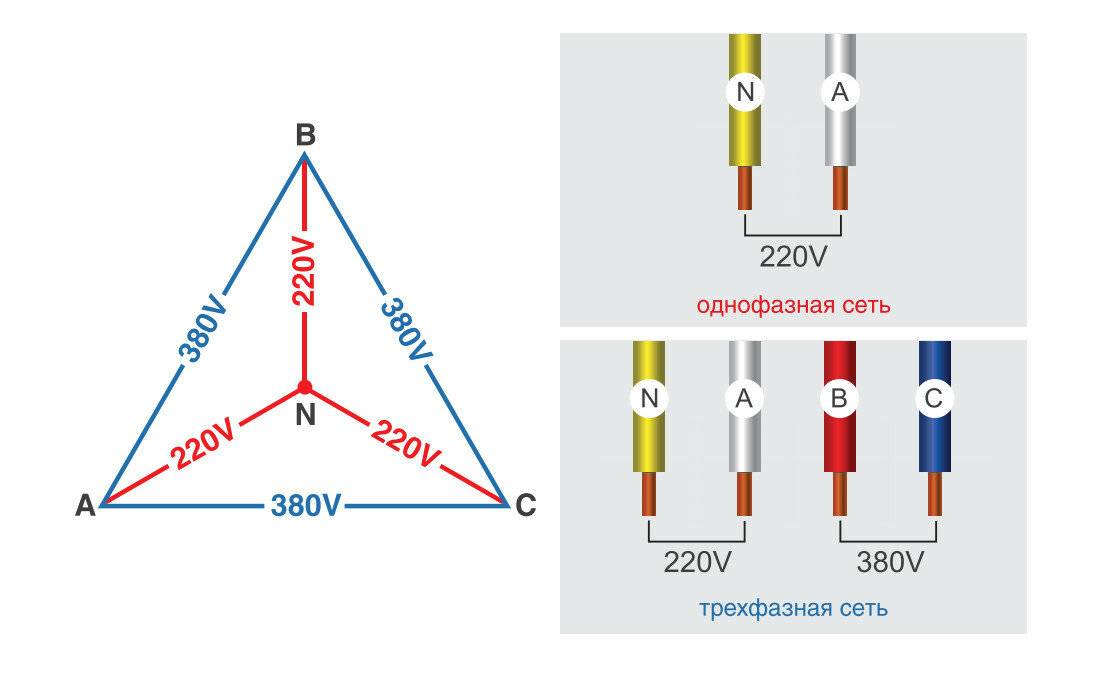 » «Отлично, и я смог получить полезные рекомендации с помощью простого телефонного звонка».
» «Отлично, и я смог получить полезные рекомендации с помощью простого телефонного звонка».
Роберт Велнер, ЧП
Нью-Йорк
«У меня был большой опыт прохождения курса «Строительство прибрежных районов – Проектирование
Строительство и ».
очень рекомендую.»
Денис Солано, ЧП
Флорида
«Очень понятный, хорошо организованный веб-сайт. Материалы курса этики штата Нью-Джерси были очень
хорошо подготовлено. 91
«Очень хорошее впечатление. Мне нравится возможность загружать учебные материалы по адресу
, просматривать где угодно и
, когда угодно».
Колорадо
«Отлично! Сохраняйте широкий выбор тем на выбор».
Уильям Бараттино, ЧП
Вирджиния
«Процесс прямой, никакой чепухи. Хороший опыт.»
Хороший опыт.»
Тайрон Бааш, ЧП
Иллинойс
«Вопросы на экзамене были наводящими и демонстрировали понимание
материала. Тщательный
и полный.»
Майкл Тобин, Ч.П. 0 «Это мой второй курс, и мне понравилось то, что курс предложил мне, что
поможет в моя линия
работы. 2 «Очень быстрая и простая навигация. Я обязательно воспользуюсь этим сайтом снова.»
Анджела Уотсон, ЧП
Монтана
«Простота в исполнении. Никакой путаницы при подходе к сдаче теста или записи сертификата.»
Кеннет Пейдж, ЧП
Мэриленд
«Это был отличный источник информации о нагревании воды с помощью солнечной энергии.
Луан Мане, ЧП
Conneticut
«Мне нравится подход, позволяющий зарегистрироваться и иметь возможность читать материалы в автономном режиме, а затем
вернуться, чтобы пройти тест. »
»
Алекс Млсна, ЧП
Индиана
«Я оценил количество информации, предоставленной для класса. Я знаю
это вся информация, которую я могу
использовать в реальных жизненных ситуациях.
Южная Дакота
курс.» 0002 Нью-Джерси
«Веб-сайт прост в использовании, вы можете скачать материал для изучения, затем вернуться
и пройти тест. Очень
удобно и на мой 90 091
собственный расписание.»
Майкл Гладд, ЧП
Грузия
«Спасибо за хорошие курсы на протяжении многих лет.»
Деннис Фундзак, ЧП
Огайо
«Очень легко зарегистрироваться, получить доступ к курсу, пройти тест и распечатать сертификат PDH
. Спасибо за создание
Спасибо за создание
900 90 процесс прост.»
Фред Шайбе, ЧП
Wisconsin
«Положительный опыт. Быстро нашел подходящий мне курс и закончил его
один час PDH в
один час.» 003
«Мне понравилась возможность скачать документы для ознакомления с содержанием
и пригодность, прежде чем
иметь для оплаты
материала.»
Richard Wymelenberg, P. Е.
Мэриленд
«Это хорошее пособие по ЭЭ для инженеров, не являющихся электриками».
Дуглас Стаффорд, ЧП
Техас
«Всегда есть возможности для улучшения, но я не могу придумать ничего в вашем
процессе, который нуждается в
улучшении.»
Томас Сталкап, ЧП
Арканзас
«Мне очень нравится удобство прохождения онлайн-викторины и немедленного получения сертификата
.