Содержание
Электропривод с шаговыми двигателями — исторический обзор.
С момента появления в прошлом веке лервых электрических машин развитие их конструкций и возможностей
определялось
возрастающими требованиями к качеству и формам электромеханического преобразования энергии. Потери в
процессе
преобразования позволяют оценить количественную его сторону, совершенство способа представления энергии в
нужной
форме. Главные же в истории электромеханики вехи связаны с получением на этой основе различных видов
механического
движения.
Углубление специализации электрических машин накладывало глубокий отпечаток на конструктивное исполнение
прототипа.
Выделялись самостоятельные технические направления. В процессе этого циклического развития шаговые, или
импульсные,
электродвигатели дважды пережили процесс рождения и целенаправленного совершенствования их специальных
свойств.
Одним из первых был описан шаговый механизм, выполненный в виде электромагнита с храповым колесом,
предложенный в
1831 г. Сальваторе дель Негро. Точную дату изобретения шагового электродвигателя указать трудно, так как
первые
электрические машины постоянного тока, снабженные простейшим коллектором или механическим прерывателем,
использовали
принцип импульсного переключения обмоток. С точки зрения современных представлений, они могут быть отнесены
к классу
шаговых электродвигателей.
Развитие в конце позапрошлого века телефонии, а затем корабельных систем дистанционной связи вызвало к
жизни поток
изобретений в области импульсных механизмов с питанием от источника постоянного тока и управлением от
механического
коммутатора. Работами известных русских изобретателей Колокольцова (1888 г.), Гейслера (1890 г.), Максимова
Работами известных русских изобретателей Колокольцова (1888 г.), Гейслера (1890 г.), Максимова
(1892 г.),
Апостолом (1894 г.) в значительной степени были заложены основы возникшего тогда нового самостоятельного
направления в
технике — систем синхронной связи на постоянном токе.
Обстоятельные очерки развития систем синхронной связи на постоянном токе с импульсными электромеханизмами
содержатся
в книгах [1. Васильев Д. В., Электрические машины в системах синхронной связи. 2. Веребрюсов Н. А.,
Синхронные
передачи и следящие системы. 3. Мкртычан Д. П., Хрущев В. В., Однофазные сельсины.]. Мы приведем лишь
характерные
примеры, заимствованные главным образом из [3], чтобы проследить цикличность инженерных поисков и решений.
купить шаговый двигатель
купить блок управления шаговым двигателем
Двигатель состоит из трех электромагнитов, расположенных под углом 120° друг к другу. Якоря электромагнитов
Якоря электромагнитов
при
помощи трех шатунов Ш1 — Ш3 соединяются с концом кривошипа, вращающегося
вокруг центра
О. Обмотки электромагнитов соединены в звезду, общая точка которой включена на отрицательный полюс
источника
постоянного напряжения. Другими своими концами обмотки соединены с неподвижными щетками Щ1 —
Щ3 коммутатора, которые поочередно подключаются к положительному зажиму ( + ) источника
при помощи
контактного сегмента С, контактного кольца К и щетки Щ4.
Теория шагового двигателя — руководство по его истории и применению
Теория шаговых двигателей: основы
Шаговый двигатель — это двигатель, который предназначен для выполнения шагов, а не просто вращения сразу после подачи питания. Шаговые двигатели различной конструкции будут иметь разное количество шагов, но два наиболее распространенных имеют 200 (1,8 градуса) или 400 шагов (0,9 градуса).
В результате их совершенно другой конструкции они обычно используются в совершенно иных приложениях, чем двигатели постоянного тока или бесщеточные двигатели постоянного тока (хотя есть некоторые кроссоверы).
Единственный способ заставить шаговый двигатель работать так, как он предназначен, — это использовать специальный драйвер или контроллер шагового двигателя. Если вы попытаетесь подключить кабели на шаговом двигателе к источнику питания (как вы сделали бы с щеточным двигателем постоянного тока), он просто заблокирует двигатель в одном положении (и начнет нагреваться, если вы оставите его подключенным на некоторое время! ).
Королевский флот впервые применил шаговые двигатели в орудийных башнях в 1930-х годах.
Краткая история шагового двигателя и его развития
Вопрос о том, кто на самом деле изобрел шаговый двигатель, до сих пор остается открытым, отчасти потому, что оригинальные версии не были сразу известны как шаговые двигатели.
Однако для большинства инженеров (включая нас) это в значительной степени связано с Фрэнком В. Вудсом, который запатентовал двигатель на основе 5 катушек статора, которые можно было заряжать в различных комбинациях для обеспечения пошагового движения.
Вудсом, который запатентовал двигатель на основе 5 катушек статора, которые можно было заряжать в различных комбинациях для обеспечения пошагового движения.
Первый зарегистрированный пример шагового двигателя, использованного в практическом применении, был сделан одним из крупнейших инициаторов инноваций в 18-м, 19-мго и 20 века, Британский Королевский флот. Система была разработана в 1930-х годах как средство управления орудийными башнями и орудиями на больших кораблях, и подобные системы используются и сегодня.
В 1960-х годах этот тип основного шагового двигателя начал заменяться шаговыми двигателями с постоянными магнитами с большим углом наклона, аналогичными типам, обычно используемым сегодня.
Однако у этих моторов был ряд проблем. Точность позиционирования была ограничена из-за отсутствия точных контроллеров шагового двигателя, а проблемы с резонансом в корпусах двигателя часто приводили к остановке и перезапуску двигателя.
На протяжении 1970-х и особенно в 1980-х и 1990-х годах были достигнуты значительные успехи в разработке контроллеров, которые могли решить некоторые из проблем резонанса, встречающихся в шаговых двигателях, а также в производственных разработках, которые снизили стоимость шаговых двигателей. Однако шаговые двигатели в то время оставались дорогими и обычно использовались в оборонных и аэрокосмических целях.
Однако шаговые двигатели в то время оставались дорогими и обычно использовались в оборонных и аэрокосмических целях.
К началу 2000-х эти разработки были настолько значительными, что стоимость шаговых двигателей и контроллеров шаговых двигателей начала падать, что позволило использовать их в ряде приложений, где раньше они были слишком дорогими.
Почему шаги полезны для двигателя?
Имея возможность выполнять определенные шаги, можно с невероятной точностью контролировать вращение двигателя вплоть до процентов градуса.
Если представить циферблат с одной стрелкой, то «традиционный» двигатель постоянного тока сможет вращаться только с постоянной скоростью.
Любое позиционирование должно контролироваться по времени или с помощью замкнутой системы с энкодером для определения положения. Однако с помощью шагового двигателя можно быстро и просто перемещать стрелку из любого положения на часах в любое другое положение с любой необходимой скоростью.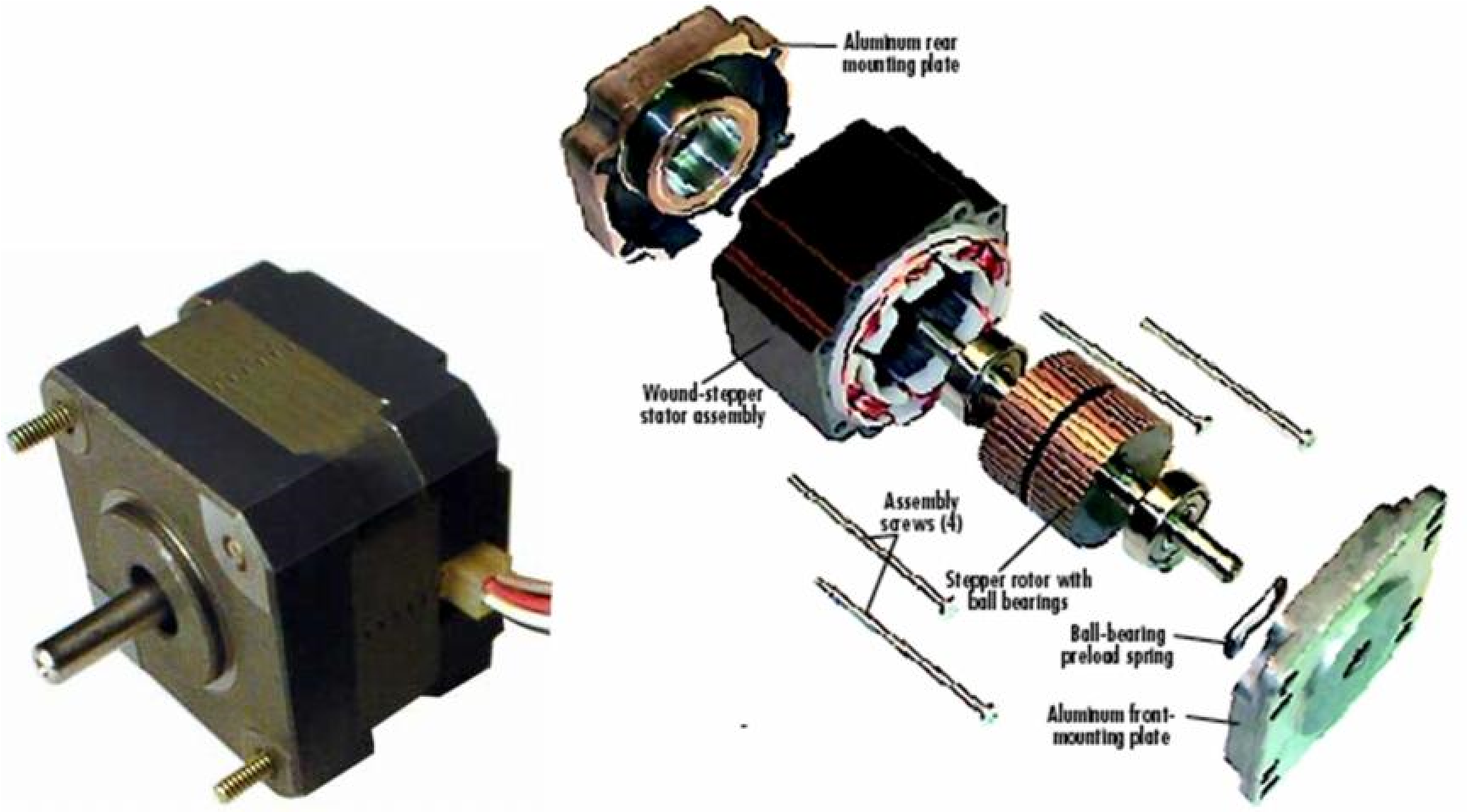
В зависимости от используемого контроллера шагового двигателя можно управлять ускорением и замедлением каждого движения и даже программировать определенные последовательности.
Что такое неэффективность?
Первое, что нужно понять, это внутренняя конструкция шагового двигателя. Шаговый двигатель — это тип бесщеточного двигателя (только в том смысле, что у него нет щеток), и у него есть магнит, непосредственно прикрепленный к валу в центре двигателя.
Что отличает его от других двигателей, так это то, что вокруг магнита есть зубья, похожие на зубья шестерни. На самом деле он имеет 2 набора зубьев вокруг ротора, которые смещены и имеют чередующиеся северный и южный полюса.
Настоящие катушки (которые включаются и выключаются контроллером шагового двигателя) устанавливаются снаружи двигателя.
Как работает шаговый двигатель
Типичный шаговый двигатель имеет 2 набора катушек, расположенных друг напротив друга (на расстоянии 180 градусов).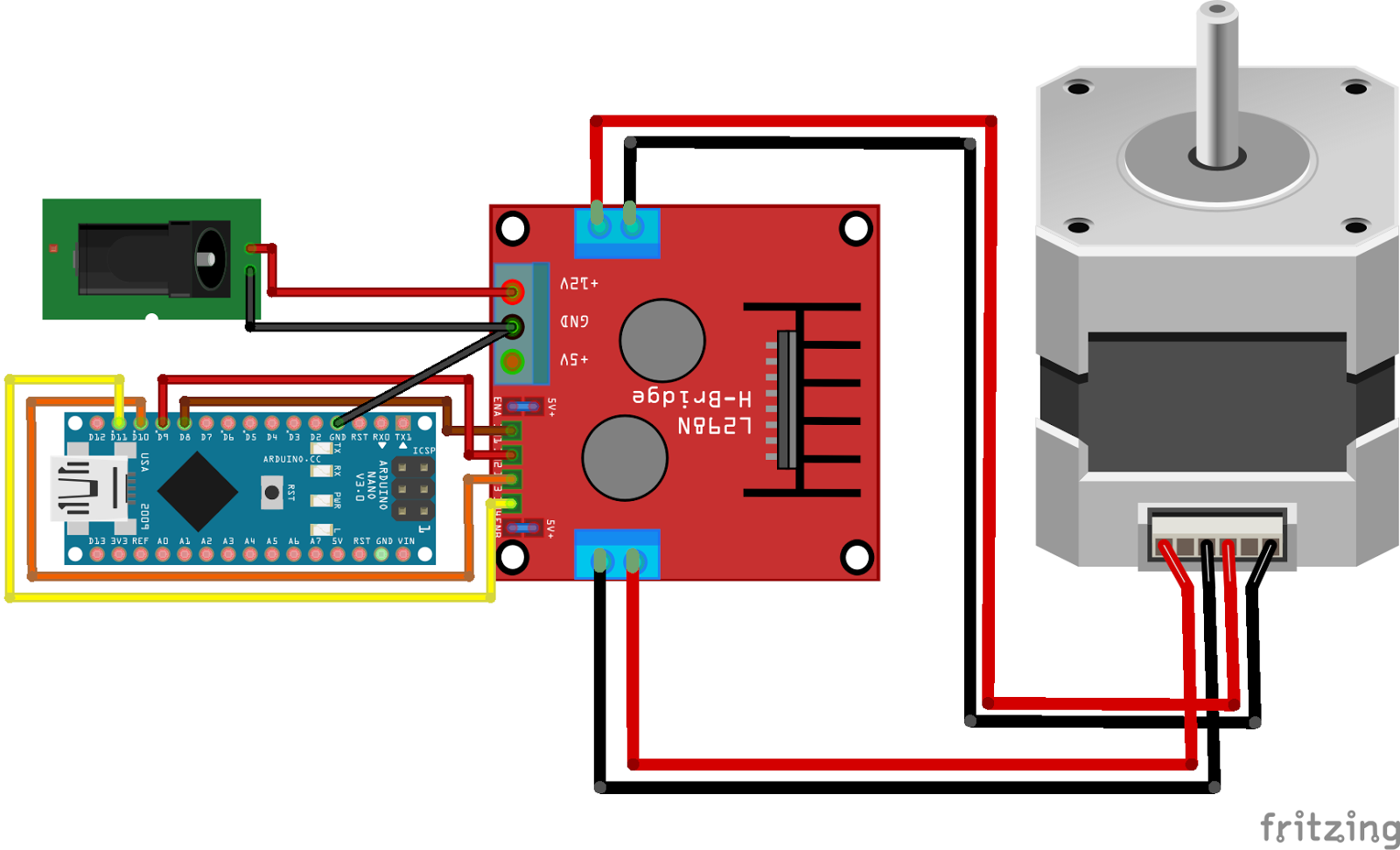
Чтобы заставить двигатель вращаться, катушки включаются, одна положительная, а другая отрицательная. Это создает в шаговом двигателе двойной эффект «тяни-толкай», который перемещает его на один шаг.
После завершения одного шага другая пара делает то же самое, и двигатель делает еще один шаг.
Поскольку этот процесс ускоряется с помощью используемого контроллера шагового двигателя, двигатель начинает вращаться более плавно (а не шаг, шаг, шаг, шаг) и может достигать скорости до 1000 об/мин.
Затем этот процесс повторяется в четыре этапа:
1. Катушка 1 положительная, катушка 3 отрицательная = 1 шаг
2. Катушка 2 положительная, катушка 4 отрицательная = 1 шаг
3. Катушка 1 отрицательная, катушка 3 положительный = 1 шаг
4. Катушка 2 отрицательная, катушка 3 положительная = 1 шаг
В зависимости от типа вашего контроллера можно включить микрошаг. Микрошаг — это умный способ увеличить количество возможных шагов в двигателе, который имеет только 200 механических шагов, путем введения дробного управления входным электрическим сигналом.
Наилучший тип двигателя для таких применений, как дозирование, где важно позиционное управление
Типичный шаговый двигатель, такой как шаговый двигатель NEMA 23 в ZD4N2318, фактически имеет 200 возможных шагов за один полный оборот на 360 градусов. Это наиболее распространенная конфигурация шагового двигателя, но есть и другие типы, которые имеют большее число шагов (например, ZDSPN1709 имеет 400 шагов).
Таким образом, со стандартным 200-шаговым двигателем мы получаем 1,8 градуса на шаг (при условии, что мы работаем в полношаговом режиме).
Если учесть, что контроллер шагового двигателя, такой как Zikodrive ZD2, может работать с разрешением до 128 микрошагов (это означает, что он имеет 128 отдельных «микрошагов» в 1 полном шаге), то становится ясно, что шаговый двигатель может обеспечивать исключительно точное позиционное точность.
Это делает его чрезвычайно полезным в таких приложениях, как насосы или приложения управления технологическими процессами, где очень точное позиционирование может иметь значение.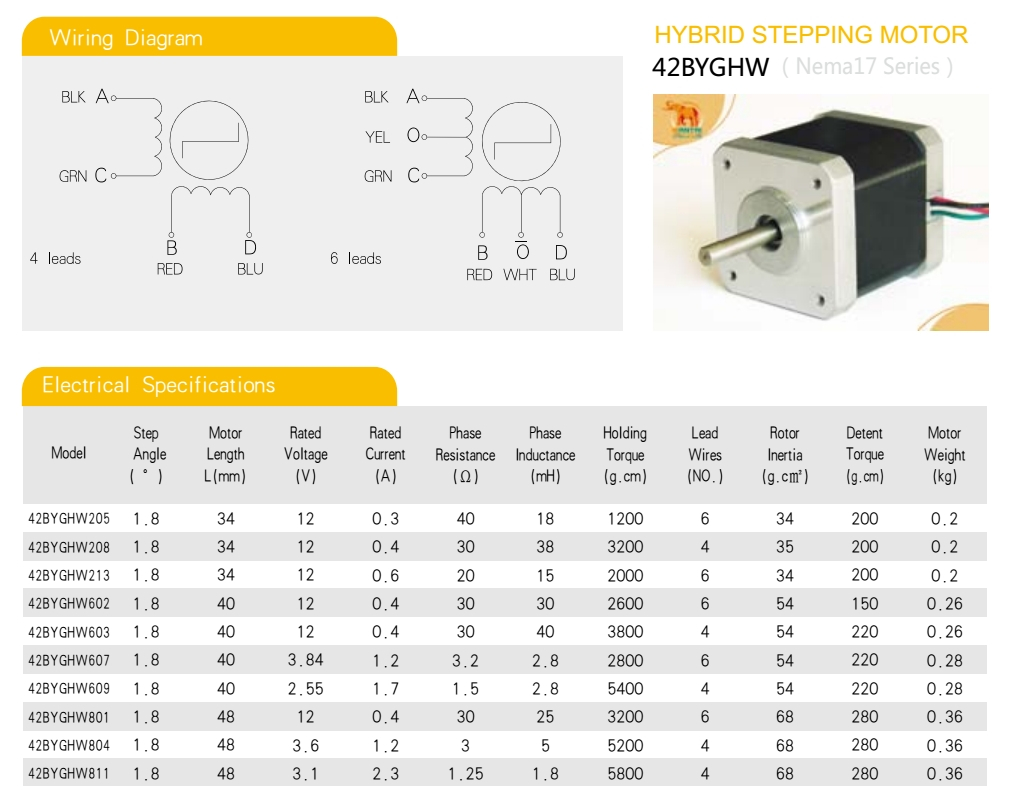 Контроллеры шаговых двигателей Zikodrive широко используются в приложениях управления насосами и технологическими процессами.
Контроллеры шаговых двигателей Zikodrive широко используются в приложениях управления насосами и технологическими процессами.
Важность контроллера шагового двигателя для определения фактической производительности двигателя
Как вы можете догадаться из приведенного выше описания, одним из наиболее важных факторов, влияющих на производительность шагового двигателя, является используемый контроллер шагового двигателя.
Проще говоря, без контроллера шаговый двигатель не сможет предложить вам никаких механических характеристик, кроме заблокированного вала.
Очень простой драйвер шагового двигателя сможет вращать шаговый двигатель, но не будет обеспечивать большой диапазон параметров управления и производительности, которые помогут вам действительно извлечь выгоду из характеристик производительности, которые может предложить шаговый двигатель.
Тем не менее, усовершенствованный микрошаговый программируемый контроллер, такой как Zikodrive ZD4, обеспечит широкий диапазон производительности шагового двигателя по вашему выбору.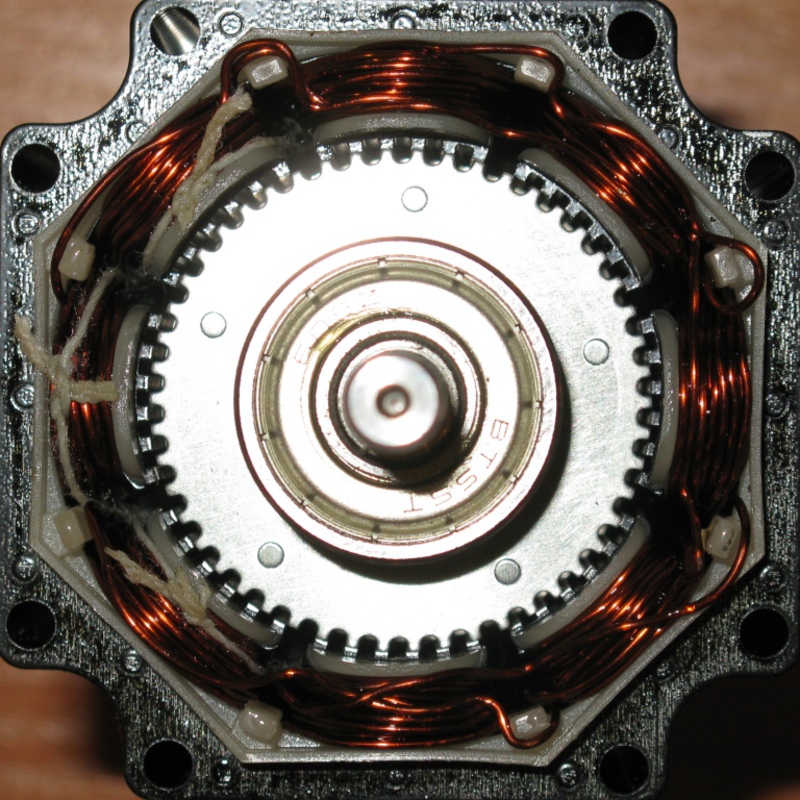 Этот тип контроллера может обеспечить высокоточное позиционирование и может быть настроен для обеспечения необходимой производительности с рядом дополнительных функций безопасности, таких как защита от перегрузки по току, защита от обратной полярности и многое другое.
Этот тип контроллера может обеспечить высокоточное позиционирование и может быть настроен для обеспечения необходимой производительности с рядом дополнительных функций безопасности, таких как защита от перегрузки по току, защита от обратной полярности и многое другое.
Все это может существенно повлиять на работу двигателя, срок службы двигателя и контроллера и эффективность всей системы.
Если вы понимаете основные принципы, изложенные выше, и знаете, что этот тип двигателя подходит для вашего приложения, вы можете начать с просмотра нашего ассортимента серийных комплектов шаговых двигателей.
Они дадут вам хорошее представление о типах функций, доступных в нашей линейке, а также о номинальных значениях мощности и скорости, которых вы можете достичь.
Если у вас есть дополнительные вопросы, вы всегда можете связаться с нами для обсуждения.
Мы стараемся поддерживать онлайн-чат между 9и 5 по Гринвичу (хотя мы не всегда можем это сделать, если мы все заняты), но если нет, вы всегда можете отправить нам электронное письмо или позвонить нам, чтобы обсудить ваш проект и то, что требуется для его успеха.
Эволюция прецизионного движения: ранняя история прецизионных двигателей (1960–1980-е годы)
В 1960 году шаговый двигатель с постоянными магнитами с большим углом наклона был наиболее используемым шаговым двигателем. Этот двухфазный шаговый двигатель с бифилярной обмоткой с постоянными магнитами (вверху) двигался механически на 45° с каждым импульсом от привода, в то время как к 1962 году приводы с постоянными магнитами (внизу) использовали полушаговые стратегии механического возбуждения на 22,5°, чтобы попытаться сгладить движение.
В этой статье мы расскажем о разработке первых шаговых двигателей и первых серводвигателей.
Соавтор: Дэн Джонс , президент Incremotion Associates.
Сегодняшнее семейство двигателей для точного позиционирования состоит из двух основных компонентов: шагового двигателя и бесщеточного двигателя с постоянными магнитами (ПМ). Оба типа постоянно развивались в течение последних 40 лет. Эти два основных двигателя предоставили многим отраслям мускульную мощь для управления системами точного позиционирования в офисной и производственной автоматизации, приборостроении, аэрокосмической и многих других областях. В то время как щеточный двигатель постоянного тока упрямо используется во многих приложениях, бесщеточный двигатель с постоянными магнитами превосходит его в постоянно расширяющемся диапазоне приложений.
В то время как щеточный двигатель постоянного тока упрямо используется во многих приложениях, бесщеточный двигатель с постоянными магнитами превосходит его в постоянно расширяющемся диапазоне приложений.
За последние 50 лет шаговые двигатели и серводвигатели попеременно занимали лидирующие позиции на рынке точных перемещений только для того, чтобы уступить их другим. Изменения на рынке щеточных/бесщеточных серводвигателей по сравнению с шаговыми двигателями были вызваны различными технологическими прорывами, такими как редкоземельный магнит, биполярный и полевой транзистор (FET), микропроцессор и цифровой сигнальный процессор. До 1955 года асинхронная сервосистема переменного тока, использующая двухфазный двигатель переменного тока, была первостепенной системой для приложений позиционирования. Шаговый двигатель начал свой первоначальный всплеск роста в 1960-х, обогнав щеточные и бесщеточные системы с серводвигателями в начале 1980-х. С тех пор бесщеточные сервоприводы постоянного и переменного тока значительно увеличили свою долю на рынке и к середине 1990-х вернули лидерство на рынке. Сегодня основные характеристики шагового двигателя объединены в замкнутой системе бесщеточного сервопривода переменного тока.
Сегодня основные характеристики шагового двигателя объединены в замкнутой системе бесщеточного сервопривода переменного тока.
Шаговый двигатель имеет несколько различных модификаций — он не страдает кризисом идентичности. Принимая во внимание, что синхронный двигатель с постоянными магнитами назывался бесщеточным двигателем постоянного тока, бесщеточным двигателем переменного тока, серводвигателем переменного тока, бесщеточным серводвигателем и другими названиями в зависимости от того, как он приводился в действие электронным способом. Диапазон идентифицирующих названий отражает различные исторические и рыночные корни бесщеточных двигателей с постоянными магнитами. Этот двигатель использует постоянный магнит для создания магнитного поля от ротора. Намотанное поле создает магнитное поле статора. Взаимодействие этих двух полей создает крутящий момент и скорость. В шаговых и бесщеточных двигателях с постоянными магнитами используются высокопроизводительные магниты, такие как самарий-кобальт или неодим-железо-бор, для создания максимально возможного крутящего момента при заданном размере корпуса.
Оба типа двигателей требуют электронных приводов, состоящих из силовой и управляющей электроники. Эти комплекты приводов обеспечивают необходимые электронные сигналы для приведения в действие или перемещения обоих семейств двигателей в соответствии с заданными профилями движения. Для управления шаговым двигателем и бесщеточным двигателем с постоянными магнитами используются разные стратегии. Шаговый двигатель обладает возможностью внутреннего магнитного позиционирования при управлении по стратегии управления без обратной связи (без обратной связи). Серводвигателю требуются различные измеренные сигналы обратной связи (коммутация, ток, скорость и положение) для сравнения с входными сигналами в стратегии управления с обратной связью. История развития электронных приводов тесно связана с развитием двигателей.
Ранние шаговые двигатели
Первый шаговый двигатель, двунаправленный, с переменным сопротивлением, был разработан для британского флота в 1933 году. Он использовался в качестве дистанционного ретранслятора положения для компаса и указателя направления орудия. Привод был грубым, но эффективным для этих медленных приложений с постоянной скоростью. Позже система была принята на вооружение ВМС США во время Второй мировой войны. Шаговый двигатель использовался в ограниченном количестве примитивных цифровых систем управления в 1950-х годах. Преобладание асинхронных сервоприводов постоянного тока с обратной связью с 1944 к 1957 году вскоре был преодолен шаговым двигателем с постоянными магнитами и наличием цифровых измерительных устройств и логики управления, необходимых для полностью цифровых систем.
Привод был грубым, но эффективным для этих медленных приложений с постоянной скоростью. Позже система была принята на вооружение ВМС США во время Второй мировой войны. Шаговый двигатель использовался в ограниченном количестве примитивных цифровых систем управления в 1950-х годах. Преобладание асинхронных сервоприводов постоянного тока с обратной связью с 1944 к 1957 году вскоре был преодолен шаговым двигателем с постоянными магнитами и наличием цифровых измерительных устройств и логики управления, необходимых для полностью цифровых систем.
Каждая чашка ротора гибридного шагового двигателя 1961 года имеет 50 мелких зубьев с шагом в один зуб ротора. Чередование северного и южного полюсов обеспечивает правильную магнитную связь с обмотками статора, создавая высокий крутящий момент и механическое шаговое движение 1,8°.
К 1960 году шаговый двигатель с постоянными магнитами (с большим углом наклона) стал основным используемым шаговым двигателем. Не было никаких лекарств от резонанса или вибрации скорости вала, кроме как остановить вал шагового двигателя и перезапустить движение.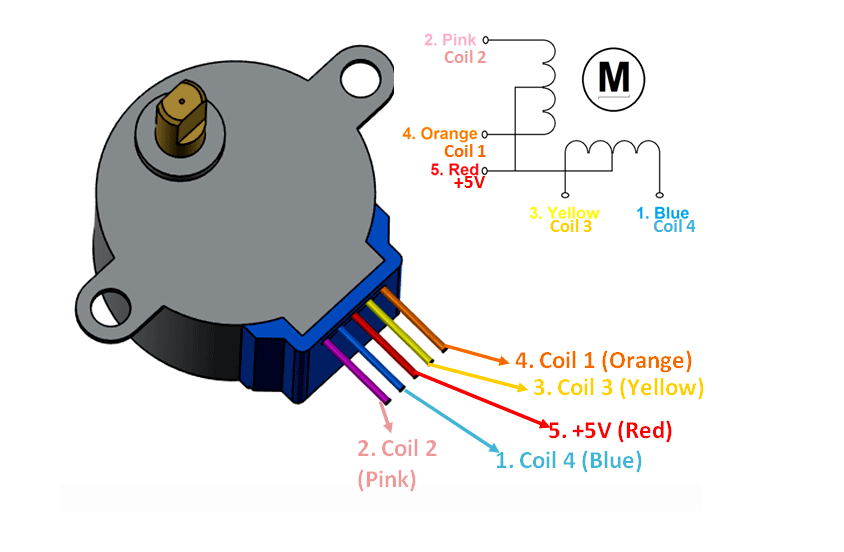 Ключевыми характеристиками были точность позиционирования без обратной связи шагового двигателя с постоянными магнитами +5% и отсутствие накопления ошибки позиционирования. Система сервопривода щетки (замкнутый контур) или система серводвигателя переменного тока небольшого прибора (двухфазная) требовали тщательной стабилизации аналоговых сигналов обратной связи (скорость и положение). Замкнуть контур сервопривода и должным образом стабилизировать серводвигатель за 19 секунд было непростой задачей.60. В 1960-е годы типичные области применения шагового двигателя включали в себя считывание данных управления дроном, индикаторы сортировки железнодорожных вагонов, индикаторы портативных станций взвешивания и цифровые дифференциальные высотомеры.
Ключевыми характеристиками были точность позиционирования без обратной связи шагового двигателя с постоянными магнитами +5% и отсутствие накопления ошибки позиционирования. Система сервопривода щетки (замкнутый контур) или система серводвигателя переменного тока небольшого прибора (двухфазная) требовали тщательной стабилизации аналоговых сигналов обратной связи (скорость и положение). Замкнуть контур сервопривода и должным образом стабилизировать серводвигатель за 19 секунд было непростой задачей.60. В 1960-е годы типичные области применения шагового двигателя включали в себя считывание данных управления дроном, индикаторы сортировки железнодорожных вагонов, индикаторы портативных станций взвешивания и цифровые дифференциальные высотомеры.
Синхронный асинхронный двигатель переменного тока
Несколькими годами ранее компания General Electric разработала синхронный индукторный двигатель переменного тока для использования в низкоскоростных устройствах с плавным движением. Этот двигатель был разработан для работы с сигналом 60 Гц, 115 В переменного тока и обеспечивает плавное непрерывное движение, эквивалентное движению секундной стрелки аналоговых часов. В 1961, Сноуден и Мэдсен из Superior Electric Co. объявили о новой версии синхронного индукторного двигателя, который впоследствии стал известен под другим названием — гибридный шаговый двигатель.
Этот двигатель был разработан для работы с сигналом 60 Гц, 115 В переменного тока и обеспечивает плавное непрерывное движение, эквивалентное движению секундной стрелки аналоговых часов. В 1961, Сноуден и Мэдсен из Superior Electric Co. объявили о новой версии синхронного индукторного двигателя, который впоследствии стал известен под другим названием — гибридный шаговый двигатель.
В течение двух лет продажи гибридных шаговых двигателей превзошли продажи синхронных асинхронных двигателей переменного тока. В схеме привода гибридного шагового двигателя 1961 года также использовалась бифилярная обмотка, приводящая в движение половинки двухфазной обмотки А1, А2, В1, В2. Ток питания был однонаправленным или по однополярной схеме возбуждения. Униполярные приводные схемы оставались популярными на протяжении 19-го века.60-х и 1970-х годов.
В 1970 году Siemens представила первый коммерческий бесщеточный двигатель постоянного тока со встроенным тахометром и датчиком положения вала. Два метода привода двухфазных бесщеточных двигателей относятся к униполярной (звезда) и биполярной (мост) схемам привода шагового двигателя.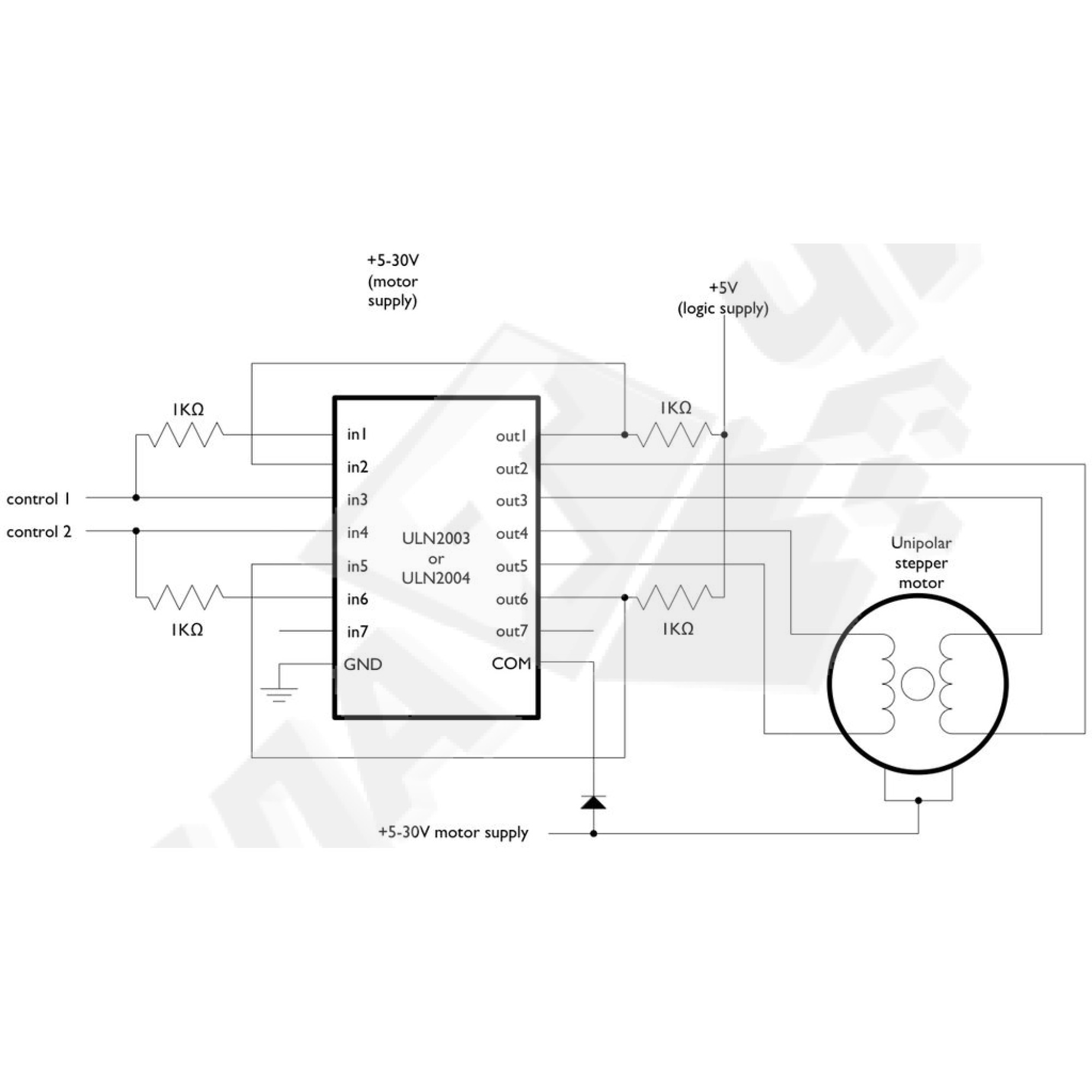
В статье Сноудена-Мэдсена также показана еще одна базовая схема привода; A, A-, B, B-, что представляет собой биполярную схему привода. Два источника питания необходимы для поддержки биполярной (двунаправленной) схемы привода. Не популярен в 1960-х и 1970-х годов биполярный привод является сегодня самой популярной схемой привода. Одно из первых применений гибридного шагового двигателя появилось на рынке промышленной автоматизации. Когда этот шаговый двигатель был механически соединен с ходовым винтом с пятью шагами, эта комбинация обеспечивала пошаговое движение на 0,001 дюйма. Этот приращение шага очень хорошо работало со столами на станках, лабораторных и коммерческих машинах. Superior Electric была пионером гибридного шагового двигателя под торговой маркой SLOSYN, к которой к концу 19 века присоединились другие.60-е годы.
Шаговые двигатели с переменным сопротивлением
Третьим основным классом шаговых двигателей, получившим популярность в 1960-х годах, были шаговые двигатели с переменным сопротивлением (VR). Шаговые двигатели VR предлагали низкую стоимость, низкую инерцию ротора, умеренную скорость и высокий рабочий крутящий момент за счет нелинейности крутящего момента в зависимости от тока, высокой чувствительности индуктивности к изменениям нагрузки и высокого резонансного потенциала. Шаговые двигатели VR приводились в действие однополярными токами в специальных приводах, отличающихся от методов привода, используемых с шаговыми двигателями с постоянными магнитами. Популярность шаговых двигателей VR, используемых в компьютерной периферии, достигла своего пика в середине 19 века.70-х годов, а к 1980 году началось снижение доли рынка. Многие шаговые двигатели VR приводили в движение подачу бумаги как в электронных принтерах, так и в бизнес-машинах. Улучшенные методы привода, более высокий крутящий момент, меньшие положения шага, более эффективное производство и контроль затрат позволили гибридному шаговому двигателю завоевать сегмент рынка шаговых двигателей с более высокими характеристиками.
Шаговые двигатели VR предлагали низкую стоимость, низкую инерцию ротора, умеренную скорость и высокий рабочий крутящий момент за счет нелинейности крутящего момента в зависимости от тока, высокой чувствительности индуктивности к изменениям нагрузки и высокого резонансного потенциала. Шаговые двигатели VR приводились в действие однополярными токами в специальных приводах, отличающихся от методов привода, используемых с шаговыми двигателями с постоянными магнитами. Популярность шаговых двигателей VR, используемых в компьютерной периферии, достигла своего пика в середине 19 века.70-х годов, а к 1980 году началось снижение доли рынка. Многие шаговые двигатели VR приводили в движение подачу бумаги как в электронных принтерах, так и в бизнес-машинах. Улучшенные методы привода, более высокий крутящий момент, меньшие положения шага, более эффективное производство и контроль затрат позволили гибридному шаговому двигателю завоевать сегмент рынка шаговых двигателей с более высокими характеристиками.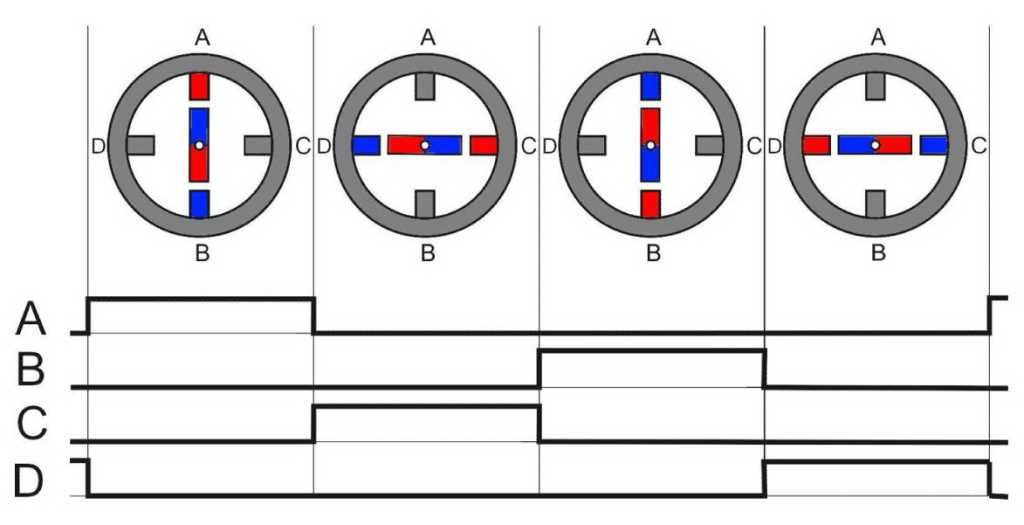
Шаговый двигатель может штабелироваться
Четвертый основной тип шаговых двигателей атаковал долю рынка шаговых двигателей VR из низкопроизводительного сегмента растущего рынка шаговых двигателей. В шаговом двигателе со стопкой банок или зубчатым зубом используется недорогая конструкция, состоящая из ряда деталей из листового металла, перфорированных и сформированных в виде чашек с зубьями (захватами), которые окружают узел катушки катушки. Два узла статора (для двух фаз) индексированы для получения попеременного возбуждения N-S-N.
Стратегии привода были такими же, как у гибридного шагового двигателя и другого (с большим углом) шагового двигателя с постоянными магнитами. Униполярные приводы с током, протекающим в одном направлении в двухфазную бифилярную обмотку, были наиболее популярным методом управления этими недорогими двухфазными шаговыми двигателями. Популярные углы шага составляли от 7,5 до 15,0 градусов на шаг. Они могут складывать двухфазные шаговые двигатели с постоянными магнитами, популярность которых возросла в 1970-х годах, и они перешли в более дешевые приложения в компьютерных принтерах, дисководах и автомобильных приводах. К концу 19 века производительность шагового двигателя с жестким стеком была достаточной, чтобы захватить большую часть рынка компьютерной периферии с более низкой производительностью благодаря шаговому двигателю VR.79.
К концу 19 века производительность шагового двигателя с жестким стеком была достаточной, чтобы захватить большую часть рынка компьютерной периферии с более низкой производительностью благодаря шаговому двигателю VR.79.
Микропроцессор
Микропроцессор ворвался на рынок движения в начале 1970-х годов. Это обеспечило почти идеальные контрольные «часы», необходимые для синхронизации последовательностей импульсов с шаговым двигателем. Переменная частота импульсов, а затем достижение скорости от 1000 до 2000 импульсов в секунду позволяют шаговому двигателю ускоряться и замедляться с точным контролем времени.
Для преодоления фазной индуктивности шаговых двигателей и нарастания фазного тока с задержкой потребовалась специальная схема привода. Методы последовательного сопротивления, впервые описанные в 1970, представленный L / nR , где n = от 2 до 4, уменьшают электрическую постоянную времени шагового двигателя, что обеспечивает быстрый рост фазного тока и быстрое увеличение крутящего момента. Другие методы управления, такие как методы двухуровневого и двойного напряжения, были разработаны для преодоления задержки тока, вызванной более высокими индуктивностями обмотки.
Другие методы управления, такие как методы двухуровневого и двойного напряжения, были разработаны для преодоления задержки тока, вызванной более высокими индуктивностями обмотки.
Последняя проблема, связанная с управлением шаговым двигателем в режиме разомкнутого контура (без обратной связи с датчиком), заключается в присущей ему способности испытывать резонанс скорости или вибрацию, что может привести к потере синхронизма и всего движения. Был разработан ряд методов и схем для стабилизации движения вала шагового двигателя в категории методов демпфирования. Эти новые схемы продолжали совершенствоваться в 1960-х и 1970-х годов. К 1975 году шаговый двигатель с цифровым управлением (в большинстве форм) развивался быстрее, чем аналоговая сервосистема, приводимая в движение щеточными двигателями. Новый тип двигателя появился из использования в основном в оборонной промышленности и промышленности с вращающимися средами, бесщеточный двигатель постоянного тока или бесщеточный двигатель постоянного тока с постоянными магнитами.
Ранние серводвигатели
Первый двигатель постоянного тока, названный «бесщеточным», был разработан компанией H.D. Брейлсфорд в середине 1950-х годов. Это новаторское усилие сильно повлияло на более позднюю работу. После того, как механические щетки были устранены, эти двигатели постоянного тока могли работать удивительно долго с большой надежностью. В двигателе Брейлсфорда для запуска или коммутации приводных транзисторов использовались пружинные контакты. При движении контакты вылетали, что позволяло работать по-настоящему без щеток. Это новаторское усилие сильно повлияло на более поздние разработки. Затем двигатель Brailsford использовался в приложениях, связанных с удаленным оборудованием, таким как портативные мониторы загрязнения.
ВВС США были очень заинтересованы в бесщеточных двигателях постоянного тока из-за серьезных проблем с щетками двигателей постоянного тока на больших высотах от 20 000 футов и выше. С началом освоения космоса проблемы с щетками стали критическими. Жизнь кисти в космосе тогда ограничивалась минутами. Высокий пиковый крутящий момент и ток линейной скорости крутящего момента можно было получить только с двигателем постоянного тока с постоянными магнитами в 1960 году. Когда Космический центр Годдарда исследовал американскую автомобильную промышленность в 1962 году, только один американский производитель имел рабочую макетную плату бесщеточного двигателя постоянного тока с электронной коммутацией. . Компания Sperry-Farragut, расположенная в Роли-Дареме, Северная Каролина, разработала первый из серии бесколлекторных двигателей постоянного тока, которые будут использоваться в различных приложениях космической программы США на протяжении 19 лет.60-е годы. Эти бесщеточные двигатели постоянного тока коммутировались за счет фотоэлектрического определения положения ротора и обладали эффективностью более чем в два раза выше, чем у сопоставимых серводвигателей переменного тока. Индукционные выпрямители с кремниевым управлением (SCR) в 1957 году обеспечили твердотельные приводы, используемые для питания этих бесщеточных двигателей постоянного тока.
Жизнь кисти в космосе тогда ограничивалась минутами. Высокий пиковый крутящий момент и ток линейной скорости крутящего момента можно было получить только с двигателем постоянного тока с постоянными магнитами в 1960 году. Когда Космический центр Годдарда исследовал американскую автомобильную промышленность в 1962 году, только один американский производитель имел рабочую макетную плату бесщеточного двигателя постоянного тока с электронной коммутацией. . Компания Sperry-Farragut, расположенная в Роли-Дареме, Северная Каролина, разработала первый из серии бесколлекторных двигателей постоянного тока, которые будут использоваться в различных приложениях космической программы США на протяжении 19 лет.60-е годы. Эти бесщеточные двигатели постоянного тока коммутировались за счет фотоэлектрического определения положения ротора и обладали эффективностью более чем в два раза выше, чем у сопоставимых серводвигателей переменного тока. Индукционные выпрямители с кремниевым управлением (SCR) в 1957 году обеспечили твердотельные приводы, используемые для питания этих бесщеточных двигателей постоянного тока.
Бесщеточные двигатели постоянного тока в космосе и промышленности
Бесщеточные двигатели постоянного тока (и связанные с ними SCR-приводы) были способны развивать мощность от 1 до 375 Вт в космических приложениях к 1965. В системе циркуляции кислорода на корабле «Аполлон» и насосе охлаждающей жидкости на ракетах-носителях «Сатурн I-B» и «Сатурн-5» использовались бесщеточные двигатели постоянного тока.
К 1965 году и Westinghouse, и GE производили бесколлекторные двигатели постоянного тока. В 1970 году GE производила бесщеточные тяговые двигатели мощностью 200 Вт для лунохода. Устройства Холла, разработанные в 1967 году, начали заменять оптическую коммутацию в качестве предпочтительного твердотельного переключающего решения. Устройство Холла вырабатывало импульс напряжения при движении через магнитное поле, что может сигнализировать о последовательном переключении обмоток статора. Philips Electronics в Голландии продала миниатюрную версию микросхемы Холла на кремниевом чипе в 1919 году. 72.
72.
В 1970 году Siemens Electric Co. разработала первый коммерческий продукт, магнитофон с батарейным питанием, двухфазным бесщеточным двигателем постоянного тока и электронным приводом по неслыханной для того времени цене в 25 долларов, в которую также входил электронный привод. Тот же бесщеточный двигатель постоянного тока и семейство приводов все еще производились 10 лет спустя. Два метода привода для этих двигателей зависели от униполярной (звезда) и биполярной (мостовой) схемы привода шагового двигателя. Метод двойного Н-моста стал самой популярной схемой привода в начале 19 века.80-е годы. К 1974 году в большинстве приложений с более высокой производительностью использовалась трехфазная схема привода. Эта трехфазная двухполупериодная схема привода с трапециевидной формой волны используется до сих пор.
Типичный пример полной бесщеточной сервосистемы PM 1975 года представляет собой бесщеточный тахометр постоянного тока, используемый в сочетании с оптическим энкодером положения и коммутационным энкодером для подачи сигналов обратной связи по скорости, положению и коммутации соответственно. Три отдельных датчика обеспечивали информацию о коммутации, скорости и положении для управления аналоговой бесщеточной сервосистемой постоянного тока в пошаговом (старт-стоп) движении.
Три отдельных датчика обеспечивали информацию о коммутации, скорости и положении для управления аналоговой бесщеточной сервосистемой постоянного тока в пошаговом (старт-стоп) движении.
Бесщеточный двигатель с постоянными магнитами имеет другое поперечное сечение, чем щеточный двигатель с постоянными магнитами или асинхронный двигатель переменного тока. Конфигурации обмотки статора в бесщеточном двигателе с постоянными магнитами и трехфазном асинхронном двигателе переменного тока эквивалентны. Но в бесщеточном двигателе с постоянными магнитами постоянные магниты прикреплены к магнитной вращающейся втулке. Бесщеточный двигатель с редкоземельными элементами с постоянными магнитами обладает превосходными характеристиками ускорения по сравнению со всеми другими типами двигателей. В 1970 году энергоэффективность составила 80%, что было намного выше, чем у любой другой технологии прецизионных двигателей (менее 1 кВт) в то время. Два основных класса бесщеточных двигателей с постоянными магнитами с внутренним ротором возникли в результате ранних разработок.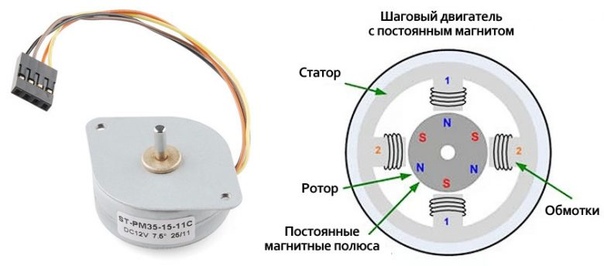 Первый класс, тип поверхностного магнита, часто называют обычным бесщеточным двигателем с постоянными магнитами. Второй класс, со скрытым магнитом, станет основным игроком на рынке бесщеточных сервоприводов в конце 19-го века.90-е годы.
Первый класс, тип поверхностного магнита, часто называют обычным бесщеточным двигателем с постоянными магнитами. Второй класс, со скрытым магнитом, станет основным игроком на рынке бесщеточных сервоприводов в конце 19-го века.90-е годы.
Магниты из редкоземельных металлов повышают производительность
Разработка семейства редкоземельных кобальтовых магнитов Исследовательским центром Райта-Паттерсона в Дейтоне, штат Огайо, в 1960-х годах стала крупным технологическим прорывом для двигателей с постоянными магнитами. Семейство самариево-кобальтовых постоянных магнитов обладало высокой способностью генерировать магнитный поток наряду с высокой коэрцитивной силой. Эти магниты при правильном использовании в бесщеточном двигателе с постоянными магнитами позволили пиковому крутящему моменту в 5 раз превысить непрерывный крутящий момент. Бесщеточный двигатель с редкоземельными элементами с постоянными магнитами может развивать более высокий пиковый крутящий момент, работать с более высоким уровнем эффективности и ускоряться с большей скоростью. Основным препятствием для быстрого роста рынка бесколлекторных двигателей постоянного тока и приводов с постоянными магнитами была значительно более высокая стоимость.
Основным препятствием для быстрого роста рынка бесколлекторных двигателей постоянного тока и приводов с постоянными магнитами была значительно более высокая стоимость.
К 1976 году бесщеточный двигатель постоянного тока рассматривался для более крупных промышленных применений с использованием приводов столов X-Y в станках и передаточных машинах. Два поставщика выделялись среди остальных. Компании Electrocraft и Indramat вели острую конкуренцию за поставку промышленных бесщеточных сервосистем постоянного тока PM для точного позиционирования в заводских условиях. Эта новая область применения сервоприводов с производительностью от 0,5 до 5 кВт в конечном итоге потребует новых схем привода и приведет к замене бесщеточного двигателя постоянного тока и привода новой схемой, известной как серводвигатель и привод переменного тока.
Справочная библиотека
Дополнительные сведения об истории двигателя см. в следующих источниках статей.
• Куо, Британская Колумбия; «Шаговые двигатели как устройства управления», Труды IMCSD, март 1972 г.