Содержание
Электродвигатель постоянного тока. Принцип действия и устройство. – www.motors33.ru
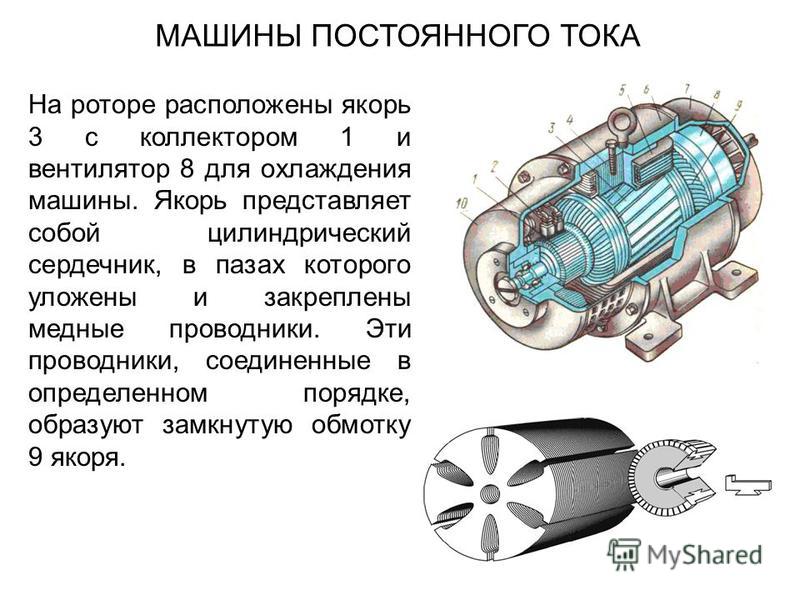
На рис. 1-1 представлена простейший электродвигатель постоянного тока, а на рис. 1-2 дано его схематическое изображение в осевом направлении. Неподвижная часть двигателя, называемая индуктор, состоит из полюсов и круглого стального ярма, к которому прикрепляются полюсы. Назначением индуктора является создание в электродвигателе основного магнитного потока. Индуктор изображенной на рис. 1-1 имеет два полюса 1 (ярмо индуктора на рис. 1-1 не показано).
Вращающаяся часть электродвигателя состоит из укрепленных на валу цилиндрического якоря 2 и коллектора. 3. Якорь состоит из сердечника, набранного из листов электротехнической стали, и обмотки, укрепленной на сердечнике якоря. Обмотка якоря в показанном на рис. 1-1 и 1-2 простейшем электродвигателе имеет один виток. Концы витка соединены с изолированными от вала медными пластинами коллектора, число которых в рассматриваемом случае равно двум. На коллектор налегают две неподвижные щетки 4, с помощью которых обмотка якоря соединяется с внешней цепью.
Основной магнитный поток в нормальных электродвигателях постоянного тока создается обмоткой возбуждения, которая расположена на сердечниках полюсов и питается постоянным током. Магнитный поток проходит от северного полюса N через якорь к южному полюсу S и от него через ярмо снова к северному полюсу. Сердечники полюсов и ярмо также изготовляются из ферромагнитных материалов.
Рис. 1-1. Простейший электродвигатель постоянного тока
Рис. 1-2. Работа простейшего электродвигателя постоянного тока в режиме генератора (а) и двигателя (б).
Генератор постоянного тока.
Рассмотрим сначала работу электродвигателя в режиме генератора.
Предположим, что якорь электродвигателя (рис. 1-1 и 1-2, а) приводится во вращение по часовой стрелке. Тогда в проводниках обмотки якоря индуктируется Э. Д. С., направление которой может быть определено по «правилу правой руки» и показано на рис. 1-1 и 1-2, а. Поскольку поток полюсов предполагается неизменным, то эта Э. Д. С. индуктируется только вследствие вращения якоря и называется Э. Д. С. вращения. В обоих проводниках вследствие симметрии индуктируются одинаковые Э. Д. С., которые по контуру витка складываются. Частота Э. Д. С. f в двухполюсном электродвигателе равна скорости вращения якоря n, выраженной в оборотах в секунду:
Д. С. индуктируется только вследствие вращения якоря и называется Э. Д. С. вращения. В обоих проводниках вследствие симметрии индуктируются одинаковые Э. Д. С., которые по контуру витка складываются. Частота Э. Д. С. f в двухполюсном электродвигателе равна скорости вращения якоря n, выраженной в оборотах в секунду:
f = n,
а в общем случае, когда машина имеет р пар полюсов с чередующейся полярностью:
f = pn
Таким образом, в генераторе коллектор является механическим выпрямителем, который преобразовывает переменный ток обмотки якоря в постоянный ток во внешней цепи.
Двигатель постоянного тока.
Рассматриваемая простейшая машина может работать также двигателем, если к обмотке ее якоря подвести постоянный ток от внешнего источника. При этом на проводники обмотки якоря будут действовать электромагнитные силы и возникнет электромагнитный момент. Величины силы и момента определяются как и для генератора. При достаточной величине Мэм якорь электродвигателя придет во вращение и будет развивать механическую мощность. Момент Мэм при этом является движущим и действует в направлении вращения.
Момент Мэм при этом является движущим и действует в направлении вращения.
Если мы желаем, чтобы при той же полярности полюсов направления вращения генератора (рис. 1-2, а) и двигателя (рис. 1-2, б) были одинаковы, то направление действия а следовательно, и направление тока у двигателя должны быть обратными по сравнению с генератором (рис. 1-2, б).
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в переменный ток в обмотке якоря и работает, таким образом, в качестве механического инвертора тока.
Принцип обратимости. Из изложенного выше следует, что каждый электродвигателя постоянного тока может работать как в режиме генератора, так и в режиме двигателя. Такое свойство присуще всем типам вращающихся электрических машин и называется обратимостью.
Для перехода машины постоянного тока из режима генератора в режим двигателя и обратно, при неизменной полярности полюсов и щеток и при неизменном направлении вращения требуется только изменение направления тока в обмотке якоря.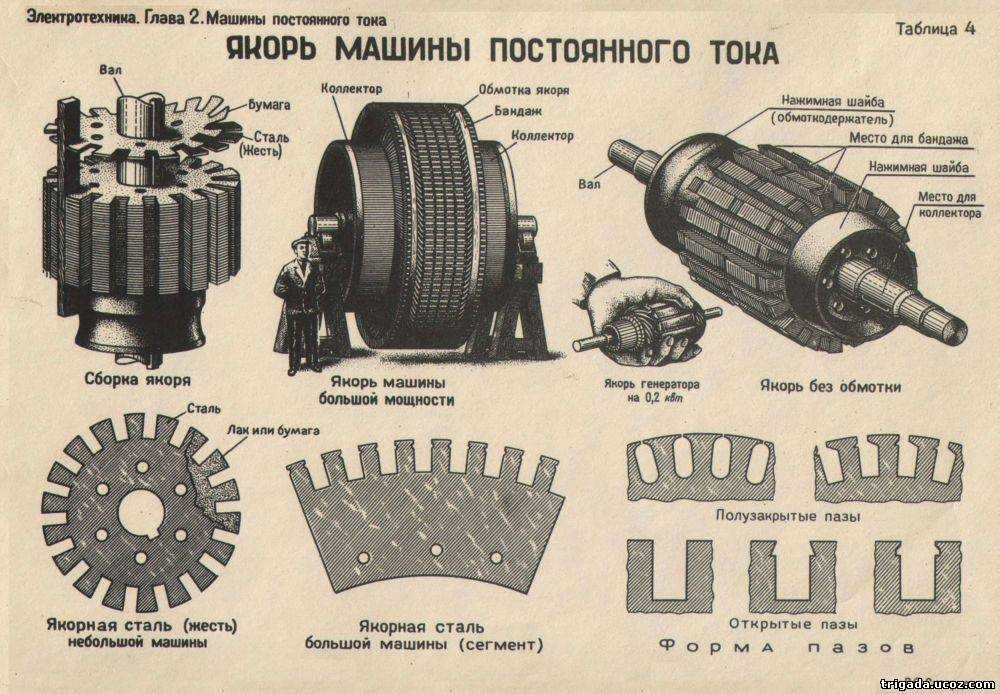
Поэтому такой переход может осуществляться весьма просто и в определенных условиях даже автоматически.
Аналогичным образом может происходить изменение режима работы также в электродвигателях переменного тока.
Электродвигатели постоянного тока
Электродвигатели постоянно присутствуют в нашей жизни. Они встречаются во многих устройствах, таких как: электрические зубные щетки, фены, миксеры, лифты и т.д. Как же работает это полезное устройство? Двигатели постоянного тока выпускаются в таком количестве версий и размеров, что действительно трудно найти место, где мы их не встретим. Это, прежде всего, все такие типы приводов, которые не требуют точного определения положения вала двигателя.
Принцип работы и устройство двигателя постоянного тока
Разберем принцип работы и устройство промышленного двигателя постоянного тока.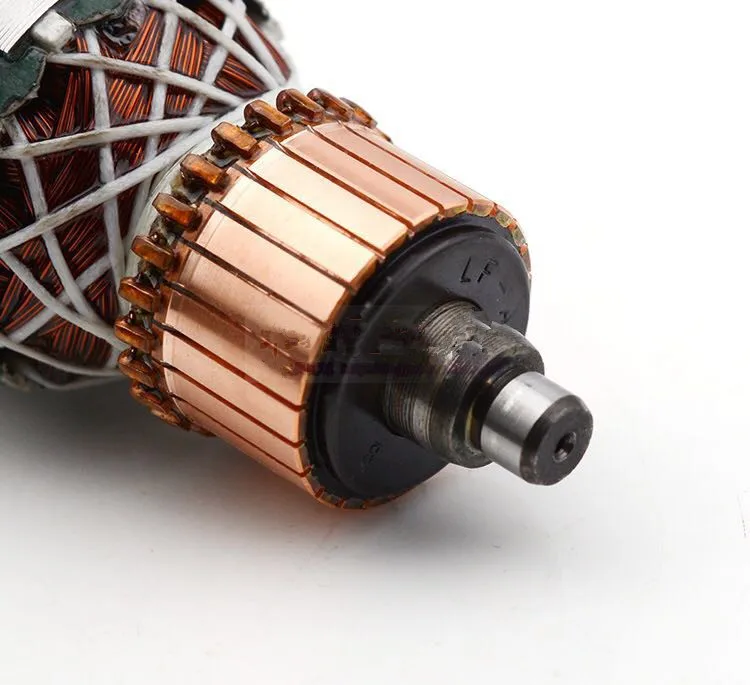 Давайте начнем с простейшего электродвигателя постоянного тока выглядит он так, статор обеспечивает постоянное магнитное поле, а якорь являющийся вращающийся частью, представляет собой простую катушку, якорь подключается к источнику постоянного тока через пару коллекторных колец. Когда ток течет через катушку, в ней находится электромагнитная сила и в соответствии с законом Лоренца, катушка начинает вращаться. Вы можете заметить, что при вращении катушки, коллекторные кольца соединяются с источником питания противоположной полярности, в результате на левой стороне катушки всегда наблюдается движение электричество от нас а на правой на нас, это обеспечивает постоянное однонаправленное движение крутящего момента, поэтому катушка будет продолжать вращаться. Но если внимательно понаблюдать за вращением катушки то можно заметить, что вращение останавливается, когда катушка расположена почти перпендикулярно магнитному потоку, поэтому у такого двигателя постоянного тока движение ротора будет неравномерным.
Давайте начнем с простейшего электродвигателя постоянного тока выглядит он так, статор обеспечивает постоянное магнитное поле, а якорь являющийся вращающийся частью, представляет собой простую катушку, якорь подключается к источнику постоянного тока через пару коллекторных колец. Когда ток течет через катушку, в ней находится электромагнитная сила и в соответствии с законом Лоренца, катушка начинает вращаться. Вы можете заметить, что при вращении катушки, коллекторные кольца соединяются с источником питания противоположной полярности, в результате на левой стороне катушки всегда наблюдается движение электричество от нас а на правой на нас, это обеспечивает постоянное однонаправленное движение крутящего момента, поэтому катушка будет продолжать вращаться. Но если внимательно понаблюдать за вращением катушки то можно заметить, что вращение останавливается, когда катушка расположена почти перпендикулярно магнитному потоку, поэтому у такого двигателя постоянного тока движение ротора будет неравномерным. Есть один прием помогающий решить эту проблему нужно добавить еще один контур обмотки к ротору с отдельной коллекторной парой для него, при такой схеме, в момент когда первый контур находится в вертикальном положении, второй контур подключается к источнику питания. Таким образом, движущая сила всегда присутствует в системе. Более того, чем больше таких контуров, тем более плавным будет вращении двигателя. На практике, контуры обмотки якоря двигателя помещаются в пазах высоко проводимых слоев стали, это позволяет улучшить взаимодействие магнитных потоков.
Есть один прием помогающий решить эту проблему нужно добавить еще один контур обмотки к ротору с отдельной коллекторной парой для него, при такой схеме, в момент когда первый контур находится в вертикальном положении, второй контур подключается к источнику питания. Таким образом, движущая сила всегда присутствует в системе. Более того, чем больше таких контуров, тем более плавным будет вращении двигателя. На практике, контуры обмотки якоря двигателя помещаются в пазах высоко проводимых слоев стали, это позволяет улучшить взаимодействие магнитных потоков.
Пружинные коллекторные щетки помогают поддерживать контакт с источником питания. Полюс статора из постоянного магнита используется только в очень маленьких двигателях постоянного тока, чаще всего используется электромагнит. Поле катушки электромагнита питается от того же источника постоянного тока. Индукторные катушки могут соединяться с роторной обмоткой двумя разными способами, параллельно или последовательно. В результате получаются две разные конструкции двигателя постоянного тока: двигатель параллельного и последовательного возбуждения. Двигатель последовательного возбуждения имеет хороший пусковой момент, но его скорость резко падает с увеличением нагрузки; двигатель параллельного возбуждения имеет низкий пусковой момент, но он способен работать практически с постоянной скоростью, независимо от нагрузки на двигатель.
Двигатель последовательного возбуждения имеет хороший пусковой момент, но его скорость резко падает с увеличением нагрузки; двигатель параллельного возбуждения имеет низкий пусковой момент, но он способен работать практически с постоянной скоростью, независимо от нагрузки на двигатель.
В отличии от других электрических машин, двигатели постоянного тока обладают уникальным свойством: генерирование обратной ЭДС (электродвижущей силы). Вращающийся контур в магнитном поле создает ЭДС, в соответствии с принципом электромагнитной индукции, тоже происходит в случае с вращающимся контуром обмотки якоря: индуцируется внутренняя ЭДС, которая противодействует прилагаемому входному напряжению. Обратная ЭДС пропорциональна частоте вращения ротора, при запуске двигателя обратная ЭДС слишком мало поэтому ток в обмотке якоря становятся слишком высоким что приводит к выгоранию ротора, поэтому для больших двигателей постоянного тока>необходим соответствующий пусковой механизм, который регулируют прилагаемое входное напряжение.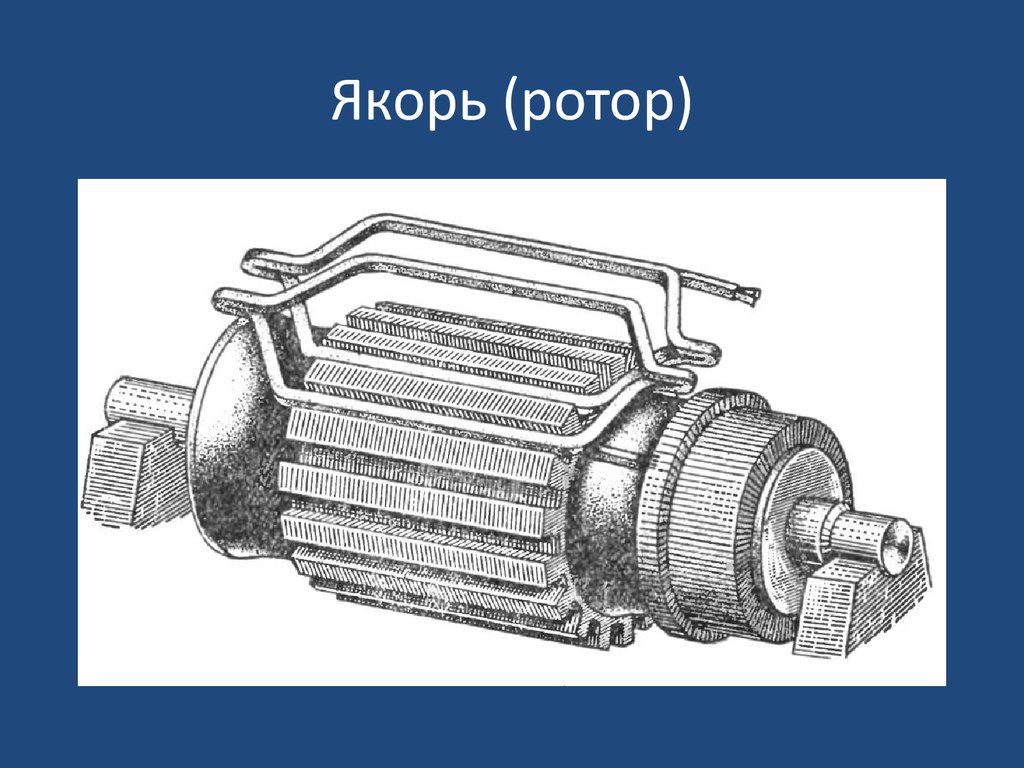
Электродвигатели постоянного тока в наличии и под заказ, звоните!
Электрические машины — Якорь машины постоянного тока
Якорь электрической машины — исторически сложившееся название обмотки, в которой индуцируется напряжение и происходит передача мощности между электрическими и механическими системами. Этот термин используется в машинах постоянного тока и синхронных машинах переменного тока. В машине постоянного тока якорь представляет собой вращающуюся цепь.
Коммутация
В машине постоянного тока, разработанной до эпохи силовой электроники, используется механическая система для переключения напряжения контура, генерируемого переменным током, и подачи напряжения постоянного тока на клеммы машины. Этот процесс называется коммутацией. Механическое переключение достигается с помощью устройства, называемого коммутатором с разъемным кольцом. Рассмотрим рисунок и иллюстрацию на рис. 1. Каждый проводник (или каждая сторона петли) соединен с цилиндрическим проводником, который разделен на две половины. При вращении ротора цилиндр находится в контакте с неподвижными щетками. (Первоначально использовались втулки из медной проволоки; в современных машинах используются подпружиненные графитовые блоки.)
При вращении ротора цилиндр находится в контакте с неподвижными щетками. (Первоначально использовались втулки из медной проволоки; в современных машинах используются подпружиненные графитовые блоки.)
При вращении ротора половинки коллектора с разрезным кольцом проходят мимо стационарных щеток. С течением времени клеммы x и y подключаются к чередующимся концам проводящего контура ротора
Рассматривая графики индуцированного (красный) и терминального (синий) напряжения во времени, становится ясно, что напряжение, индуцированное в проводящем контуре на роторе продолжает чередоваться между положительным и отрицательным. Однако из-за расположения щеток измеренное напряжение на клеммах x-y является однонаправленным.
Рис. 1. Иллюстрация работы коммутатора
Увеличенное количество полюсов и проводников
Реалистичные конструкции машин постоянного тока обычно имеют более двух полюсов. Увеличение количества полюсов для определенного потока на полюс увеличит наведенное напряжение при заданной скорости и увеличит крутящий момент, доступный на ампер. На рис. 1 показана схема статора с 4 полюсами. Каждый полюс будет
На рис. 1 показана схема статора с 4 полюсами. Каждый полюс будет
нести катушку, являющуюся частью обмотки возбуждения. Картина потока будет похожа на
Показаны линии потока, чередующие северный и южный полюса.
Рис. 2. Иллюстрация 4-полюсного поля постоянного тока
В общем случае с \(p\) полюсами картина поля будет повторяться каждые \(720/p\) градусов.
В рассматриваемой исходной базовой машине имеется только 2
проводников, или одна петля на роторе. Если количество витков (и разрезных колец
сегментов коммутатора) увеличивается, то щетки можно спроектировать так, чтобы они всегда были
в контакте с проводником, который находится под поверхностью полюса. Пример этой идеи с двумя катушками показан на рис. 3 9.0003 Рис. 3. Анимация двухполюсной системы с двумя перпендикулярными катушками обмотки якоря
Уравнения для общей машины
Среднее индуцированное напряжение каждого проводника на роторе машины определяется выражением
\[
e_{av}=rlB_{av}\omega_m
\]
\(e_{av}\) — среднее индуцированное напряжение и
\(B_{av}\) — величина средней плотности потока под полюсом.
Используя общее уравнение для площади поверхности полюса
\[
A_p=\frac{2\pi rl}{p}
\]
уравнение для среднего напряжения, индуцированного на проводнике под поверхностью полюса
можно найти через поток и скорость:
\[
e_{av}=\frac{p}{2\pi}\phi\omega_m
\]
Теперь, если вместо одного витка провода есть катушка с общей
Z проводников (\(Z/2\)витков) соединены
последовательно в любое время:
\[
e_{av}=\frac{Zp}{2\pi}\phi\omega_m
\]
Обмотка машины, в которой индуцируется напряжение, называется
обмотка якоря. В машине постоянного тока обмоткой якоря является
обмотка на роторе. Определение постоянной машины постоянного тока \(k\):
\[
k=\frac{ZP}{2\pi}
\]
приводит к уравнению напряжения якоря.
\[
E_A=к\фи\омега_м
\]
Аналогично общему расчету напряжения, крутящий момент на одном проводнике
можно записать как
\[
\tau_{av}=rlB_{av}я
\]
, что дает общий крутящий момент, заданный уравнением крутящего момента машины постоянного тока.
\[
\тау=к\фи I_A
\]
Обратите внимание, что, поскольку мы перешли к уравнениям с постоянными значениями постоянного тока, уравнение напряжения якоря записывается в верхнем регистре как \(E_A\), чтобы обозначить, что это постоянное напряжение, а уравнение крутящего момента использует \(I_A\ ), чтобы показать, что ток является постоянным значением постоянного тока.
Цепь якоря
Модель эквивалентной схемы якоря
Модель эквивалентной схемы для якоря
машина постоянного тока показана на рис. 1. Наведенное напряжение якоря,
\(E_A\) представлен источником напряжения,
подключен через 2 щетки к остальной части цепи. Арматура
сопротивление обмотки \(R_A\) и напряжение на клеммах \(V_T\). Уравнение цепи якоря:
\[
V_T = E_A + I_A R_A
\]
Рассматривая модель эквивалентной схемы, можно увидеть, что измеряемое напряжение машины, напряжение на клеммах \(V_T\) равно наведенному на якорь напряжению \(E_A\), когда ток якоря \(I_A\) равен нуль. Это происходит в двух случаях:
- без нагрузки: клеммы якоря подключены к источнику напряжения, но момент нагрузки отсутствует.
 В установившемся режиме момент двигателя и момент нагрузки равны и противоположны друг другу, то есть \(\tau=0\). Следовательно, ток якоря \(I_A\) равен нулю в соответствии с уравнением крутящего момента и \(E_A=V_T\)
В установившемся режиме момент двигателя и момент нагрузки равны и противоположны друг другу, то есть \(\tau=0\). Следовательно, ток якоря \(I_A\) равен нулю в соответствии с уравнением крутящего момента и \(E_A=V_T\) - обрыв цепи: это тестовый случай, когда машина вращается внешней механической системой, а клеммы машины разомкнуты. Опять же, в этом случае \(I_A = 0 \) и \(E_A=V_T\)
 В установившемся режиме момент двигателя и момент нагрузки равны и противоположны друг другу, то есть \(\tau=0\). Следовательно, ток якоря \(I_A\) равен нулю в соответствии с уравнением крутящего момента и \(E_A=V_T\)
В установившемся режиме момент двигателя и момент нагрузки равны и противоположны друг другу, то есть \(\tau=0\). Следовательно, ток якоря \(I_A\) равен нулю в соответствии с уравнением крутящего момента и \(E_A=V_T\)Рис. 4. Эквивалентная схемная модель якоря двигателя постоянного тока
Резюме
На этой странице простые уравнения постоянного тока расширяются до случая с несколькими полюсами и проводниками. Получены два важных уравнения для машин постоянного тока:
- Уравнение напряжения якоря
- Уравнения крутящего момента машины постоянного тока
Якорь моделируется эквивалентной схемой, учитывающей влияние сопротивления обмотки якоря.
\(E_A\) — наведенное внутреннее напряжение якоря; \(V_T\) — напряжение на клеммах.
Управление якорем и возбуждением двигателей постоянного тока
Driven By Excellence
Приводы постоянного тока обеспечивают возможность управления скоростью и крутящим моментом мощных двигателей постоянного тока в различных промышленных и других подобных приложениях. Управление скоростью может быть достигнуто с помощью приводов постоянного тока несколькими способами. На клеммы двигателя постоянного тока может быть подано напряжение, или к якорю может быть приложено внешнее сопротивление.
Управление скоростью может быть достигнуто с помощью приводов постоянного тока несколькими способами. На клеммы двигателя постоянного тока может быть подано напряжение, или к якорю может быть приложено внешнее сопротивление.
Другой метод заключается в изменении потока на полюс двигателя. Первые два метода включают регулировку якоря двигателя, а последний метод включает регулировку поля двигателя. Эти методы называются «управление якорем» и «управление полем».
Узнайте об основах управления двигателем
Что такое двигатель постоянного тока?
А DC — двигатель постоянного тока — это устройство, которое получает электрическую энергию и преобразует ее в механическую энергию. Они делают это через материал проводника, который проводит ток внутри и передает его на спиральные провода, называемые обмотками. Импульсный ток создает магнитные поля, которые взаимодействуют с магнитами на роторе.
Если магниты и поле притягиваются, двигатель вращается в одну сторону. И наоборот, два отталкивающих поля заставляют двигатель вращаться в противоположном направлении. Коммутатор — внутренний компонент — подает постоянный ток на обмотки, чтобы продолжать генерировать магнитные поля и вращать двигатель.
И наоборот, два отталкивающих поля заставляют двигатель вращаться в противоположном направлении. Коммутатор — внутренний компонент — подает постоянный ток на обмотки, чтобы продолжать генерировать магнитные поля и вращать двигатель.
Двигатели постоянного тока входят в стандартную комплектацию промышленного оборудования благодаря двум уникальным характеристикам. Эти двигатели могут запускаться, реверсироваться или останавливаться по требованию, что очень важно для производства. Они также поддерживают контроль скорости, что является еще одним необходимым условием для точной работы станка.
Что такое управление скоростью двигателя постоянного тока?
Для многих применений требуется регулировка скорости двигателя постоянного тока, что обеспечивает максимальную функциональность и производительность машины. Делать это преднамеренно и по мере необходимости требует контроля скорости. Операторы могут делать это вручную или полагаться на автоматизированные технологические устройства. Управление скоростью двигателя постоянного тока отличается от регулирования скорости, которое поддерживает постоянную скорость, несмотря на колебания нагрузки.
Управление скоростью двигателя постоянного тока отличается от регулирования скорости, которое поддерживает постоянную скорость, несмотря на колебания нагрузки.
Регуляторы скорости бывают двух основных видов — управления якорем и управления полем. Изменения напряжения на клеммах или воздействия внешнего сопротивления выполняют функцию управления якорем. И наоборот, изменение магнитного потока является методом управления полем.
Принцип работы двигателя постоянного тока
Работа двигателей постоянного тока основана на нескольких законах электричества. Закон Фарадея об электромагнетизме гласит, что проводник с током подвергается механической силе при встрече с магнитным полем. «Правило левой руки» Флеминга гласит, что движение проводника всегда перпендикулярно магнитному полю и току.
По закону Ленца возникающее электромагнитное поле (ЭДС) сопротивляется напряжению, создавая явление, называемое обратной ЭДС. Эта обратная ЭДС придает двигателям постоянного тока уникальную способность балансировать крутящий момент при различных нагрузках.
Управление якорем для двигателей постоянного тока
При управлении якорем напряжение изменяется несколькими способами. Один из способов — реализовать сопротивление якоря, которое включает последовательное подключение переменного сопротивления к цепи якоря. Как только сопротивление увеличивается, ток, протекающий через цепь, уменьшается, а падение напряжения на якоре становится меньше, чем напряжение в сети. Это, в свою очередь, снижает скорость двигателя пропорционально приложенному напряжению. Метод управления сопротивлением якоря используется в приложениях, требующих изменения скорости двигателя в течение более коротких периодов времени, а не непрерывно. Другими методами управления якорем являются контроль напряжения якоря и контроль сопротивления шунта.
Как рассчитывается скорость двигателя постоянного тока?
Чтобы определить скорость двигателя постоянного тока, вам нужно чистое напряжение — напряжение питания плюс противо-ЭДС. Из этого числа вычтите ток якоря, умноженный на сопротивление якоря. Разделите этот результат на магнитный поток на полюс, чтобы найти скорость двигателя постоянного тока.
Из этого числа вычтите ток якоря, умноженный на сопротивление якоря. Разделите этот результат на магнитный поток на полюс, чтобы найти скорость двигателя постоянного тока.
Преимущества двигателей постоянного тока с управлением якорем
Управление якорем представляет собой систему с замкнутым контуром, тогда как управление полем представляет собой систему с разомкнутым контуром. Замкнутые системы часто являются предпочтительным выбором для операторов и бизнес-лидеров, которые ищут стабильность и удобство автоматизированного процесса. Двигатели, управляемые якорем, обеспечивают почти непревзойденную точность и управляемость, а также широкий диапазон изменения скорости.
Дополнительные преимущества двигателей постоянного тока с управлением якорем включают:
- Постоянный ток возбуждения и крутящий момент: При использовании метода управления якорем уровни тока возбуждения и крутящего момента остаются постоянными на протяжении всего применения. Независимо от скорости двигателя, вы можете положиться на эти факторы.
- Быстрое и простое изменение скорости: Двигатели постоянного тока с управлением якорем известны своей исключительной регулировкой скорости, которая позволяет операторам изменять скорость по мере необходимости в обоих направлениях.
 Независимо от скорости двигателя, вы можете положиться на эти факторы.
Независимо от скорости двигателя, вы можете положиться на эти факторы.Недостатки двигателей постоянного тока с управлением якорем
Хотя двигатели с управлением якорем быстродействующие и идеально подходят для кратковременных фиксированных процессов, у них есть несколько недостатков, которые следует учитывать при сравнении управления якорем с управлением полем:
- Более высокие первоначальные затраты: Метод управления якорем часто дороже, чем метод управления полем.
- Низкая энергоэффективность: Одна из причин, по которой управление якорем чаще всего используется в течение более коротких промежутков времени, заключается в том, что при изменении скорости теряется большое количество энергии. Эта потеря мощности делает процесс менее энергоэффективным и более дорогостоящим в целом.
 Эта потеря мощности делает процесс менее энергоэффективным и более дорогостоящим в целом.
Эта потеря мощности делает процесс менее энергоэффективным и более дорогостоящим в целом.Метод управления полем
При использовании метода управления полем для двигателей постоянного тока поле ослабляется для увеличения скорости или может быть усилено для снижения скорости двигателя. Достижение скоростей, превышающих номинальную скорость, может быть достигнуто за счет включения переменного сопротивления последовательно цепи возбуждения, изменения сопротивления магнитной цепи или изменения приложенного напряжения двигателя к цепи возбуждения (при подаче постоянного напряжения на цепь возбуждения). цепь якоря).
Преимущества двигателей постоянного тока с управлением от поля
Как система с разомкнутым контуром, метод управления полем идеально подходит для операторов, которым требуется экономичность, плавная работа и стабильная производительность. Двигатели постоянного тока с полевым управлением чаще используются для более длительных процессов из-за их надежности и удобства. В отличие от двигателей, управляемых якорем, управление полем обеспечивает скорость, превышающую нормальный диапазон.
В отличие от двигателей, управляемых якорем, управление полем обеспечивает скорость, превышающую нормальный диапазон.
К основным преимуществам этого метода относятся:
- Низкие затраты: Метод управления полем является очень экономичной формой управления двигателем. Он прост в использовании и управлении, а более низкие эксплуатационные расходы делают его рентабельным в долгосрочной перспективе. Для производителей или инженеров с ограниченным бюджетом это идеальное решение.
- Минимальные потери мощности: Скорость двигателя постоянного тока, управляемого полем, изменяется за счет магнитного поля, а не якоря. В результате этот метод обычно тратит меньше энергии. Дополнительная энергоэффективность может сэкономить время и деньги, помогая окружающей среде.
Недостатки двигателей постоянного тока с полевым управлением
Электродвигатели постоянного тока с полевым управлением просты и удобны, что делает их популярным выбором для операторов двигателей и производителей. С другой стороны, есть определенные случаи, когда другой метод управления двигателем может быть более эффективным. К недостаткам полевого контроля относятся:
С другой стороны, есть определенные случаи, когда другой метод управления двигателем может быть более эффективным. К недостаткам полевого контроля относятся:
- Ограничения по скорости: Если ваше приложение требует, чтобы вы отрегулировали скорость двигателя ниже нормальной, вам может быть лучше выбрать метод управления якорем. Двигатели постоянного тока с полевым управлением могут работать только со скоростью, превышающей нормальную. Более высокие скорости также могут привести к меньшему крутящему моменту.
- Пониженная устойчивость: Метод управления полем позволяет операторам получать более высокие скорости, чем обычно. Тем не менее, его общий диапазон может быть снижен из-за отсутствия стабильности. С более слабым полем вы сможете безопасно превысить только определенные скорости.
Сравните несколько приводов постоянного тока, чтобы найти тот, который обеспечит эффективное и экономичное управление вашим двигателем постоянного тока. Приводы постоянного тока имеют специальные функции и возможности для удовлетворения различных потребностей. Приводы постоянного тока могут быть регенеративными или нерегенеративными, с различной мощностью, конструкциями крепления и т. д.
Приводы постоянного тока имеют специальные функции и возможности для удовлетворения различных потребностей. Приводы постоянного тока могут быть регенеративными или нерегенеративными, с различной мощностью, конструкциями крепления и т. д.
Руководство по применению систем управления
Другие типы управления скоростью
Существуют различные способы управления скоростью двигателей в зависимости от конфигурации двигателя. Вот некоторые типичные для серийных двигателей:
- Метод контроля сопротивления якоря: Этот подход требует контроля сопротивления в соединении с источником питания. Чаще всего снижают скорость при небольших нагрузках.
- Регулятор шунтирующего якоря: В этой технике используется реостат, который изменяет подачу напряжения.
- Контроль напряжения на клеммах якоря: Этот метод основан на отдельном источнике напряжения с регулируемым входом.
- Метод отвода поля: При таком подходе вы уменьшаете поток возбуждения за счет шунтирования вокруг ряда, чтобы снизить сопротивление и увеличить скорость.
