



Нурмагамбетов А. А. Применение датчиков положения ротора для создание вращающего момента вентильного электродвигателя [Текст] // Технические науки: теория и практика: материалы III Междунар. науч. конф. (г. Чита, апрель 2016 г.). — Чита: Издательство Молодой ученый, 2016. С. 63-67. URL https://moluch.ru/conf/tech/archive/165/10221/ (дата обращения: 15.08.2018).
На сегодняшний день разработка и исследование электромеханических систем с бесконтактными двигателями постоянного тока в качестве объекта управления преобладает все большее значение, что характерно существующими преимуществами по сроку службы, особенностью работы в суровых условиях эксплуатации, универсальностью регулировочных качеств, а также достаточной легкостью в управлении. Разнообразие имеющих и разрабатываемых бесконтактных двигателей способствовала за собой появление огромного числа разных схем управления этими двигателями.
Необходимо отметить, что основное внимание исследователей сосредоточено на решении основных вопросов по построения отдельных узлов бесконтактных двигателей постоянного тока и их конструктивного усовершенствования. Условно меньшее количество работ посвящено аспектом по проектированию совершенно новых универсальных алгоритмов и средств управления электромеханическими системами с применением бесконтактных двигателей постоянного тока, направленных на улучшение их энергетических показателей.
Переключение фаз статора должно производиться при определенных, согласованных с ними, положениях ротора. Поэтому на валу ЭД обычно располагается датчик положения ротора (ДПР), формирующий определенны сигналы которые используются логическое устройства (ЛУ) для формирования команд управления полупроводниковым коммутатором (ПК).
Отличие вентильного двигателя от синхронного электродвигателя состоит в том, что частота поля статора в нем изменяема, а определяется частотой вращения ротора частотой сигналов датчика положения ротора, используемых для управления полупроводниковым коммутатором, определяется частотой вращения ротора. Поэтому вентильный двигатель можно изучать как синхронный электродвигатель с переменной частотой питания статорных обмоток, аналогично частоте вращения ротора. Тем самым, поле статора вынужденно по сигналам датчика положение ротора одновременно вращается с ротором, что дает возможность в теоретическом плане для изучения вентильного двигателя использовать теорию двух реакций, при исследовании синхронных электродвигателей обычной конструкции. В то же время происходящие действия и механическая характеристика вентильного двигателя такие же, как у обычных коллекторно-щеточных двигателей постоянного тока, следовая этому средние за период параметры вентильных двигателей могут быть достаточно точно охарактеризовать их уравнениями. Распределение тока в фазах электродвигателя должны осуществляться в согласованных с силовым магнитом положениях. Необходимо на валу электродвигателя расположить элементы датчика положения ротора, фиксирующие угловые положения ротора электродвигателя и взаимное расположение магнита ротора и обмоток статора. Возможны также и бездатчиковые схемы управления вентильными двигателями с использованием для формирования сигналов о положении ротора моментов прохождения через нуль противо-эдс незапутанных в момент измерений фаз в рабочем режиме в каждый момент времени запутаны только 2 фазы. Датчик положения ротора может быть реализован различными способами: с использованием эффекта Холла, оптическими или индукционными методами. Рассмотрим сначала индукционный метод: обмотки (L) датчика положения ротора намотаны на ферритовые кольца, расположенные на статоре электродвигателя, образуя дроссели (рис. 1, а). Через сопротивление R они запутаны от задающего генератора (ЗГ) частотой f=100кГц. На статоре они расположены под углом 120° друг к другу. Сигнальный двухполюсный магнит дважды за один оборот смещает рабочую точку дросселя в зону насыщения (рис.1, б) уменьшая тем самым его индуктивное сопротивление практически до нуля. Если магнит располагается к обмотке дросселя боковой поверхностью, то рабочая точка возвращается в центр характеристики, индуктивное сопротивление дросселя возрастает, на выходе детектора датчика положение ротора появляется напряжение логическая единица в виде сигналов ДА, ДВ, ДС. За один оборот ротора 360° геометрических период логического сигнала на выходе фильтра составит 720° электрических (рис. 2).
Применение датчиков Холла, вместо индукционных, значительно сокращает электронные затраты, позволяя непосредственно получить выходной сигнал в логической форме, минуя операцию детектирования (рис. 3). На выходе датчика Холла по мере прохождения под ним магнита на клеммах 2–3 датчиков Д1...Д3 появляется переменное напряжение с частотой, равной частоте вращения магнита очень низкого уровня — положительной полярности (55–70) мВ и отрицательной полярности (70–85) мВ.
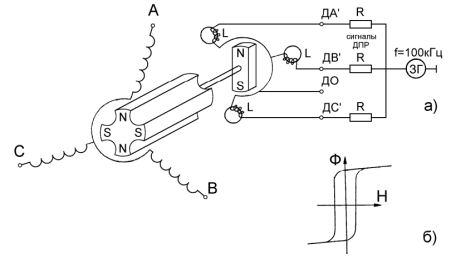
Рис. 1. Схематичное изображение силовой и сигнальной части вентильного двигателя

Рис. 2. Сигналы индуктивных датчиков положения ротора
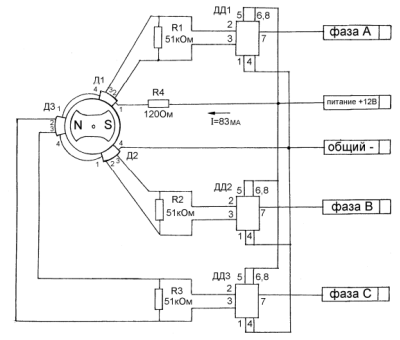
Рис. 3. Формирование сигнала о скорости с помощью датчиков Холла
Применение датчиков Холла позволяет использовать вместо расщепленного биполярного монополярное питание, что сокращает и габариты источника питания.
Датчики Холла, компараторы, резисторы устанавливаются непосредственно на корпус датчика положения ротора. Контакты питания +12В, общий, фазы А, В, С выводятся через отдельный штепсельный разъем. При использовании датчиков Холла сигналы показаны на (рис. 4), а связь сигналов и границ секторов, где происходит коммутация. (рис. 5) Если при использовании индукционных датчиков коммутация производилась через 30°, то при использовании датчиков Холла — через 60°, т. е. силовой магнит и датчики Холла должны быть ориентированы взаимно таким образом, чтобы линии переключения (рис. 3) проходили через 15° и 75°. При этом пульсация момента будет несколько больше, а число секторов сократится вдвое (рис. 4 и 5).
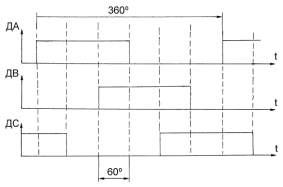
Рис. 4. Сигналы датчика положения ротора при использовании датчиков Холла
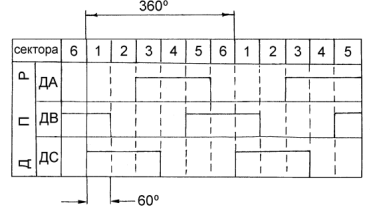
Рис. 5. Связь сигналов датчика положения ротора и границ секторов при использовании датчиков Холла
Применение датчиков положения ротора для создание вращающего момента вентильного электродвигателя и его моментных характеристик можно сделать дополнительно следующие выводы, которые будут полезны для разработки алгоритма управления полупроводниковым коммутатором:
1. Магнитное поле, образованное силовым магнитом и магнитное поле, образованное статорными обмотками, представляют собой фигуры в виде двух вращающихся крестов: первый вращается плавно, второй — скачками, через 30° геометрических.
2. Для осуществления реверса в двигательном режиме магнитный поток и ток обмоток якоря следует повернуть в обратную сторону, в алгоритме программы управления знак индекса ключа изменить на противоположный. В режиме динамического торможения алгоритм программы для правого и левого направлений вращения неизменен.
3. Моменты коммутации ключей силового моста при рассогласовании магнитных потоков, создаваемых с помощью обмоток статора и силовым магнитом (30° и 60°), должны определяться с помощью датчика положения ротора.
Литература:Основные термины (генерируются автоматически): вентильный двигатель, датчик положения ротора, датчик Холла, силовой магнит, использование датчиков Холла, полупроводниковый коммутатор, положение ротора, частота вращения ротора, двигатель, магнитное поле.
вентильный двигатель, датчик положения ротора, датчик Холла, силовой магнит, использование датчиков Холла, полупроводниковый коммутатор, положение ротора, частота вращения ротора, двигатель, магнитное поле.
Применение датчиков положения ротора для создание... Поэтому вентильный двигатель можно изучать как синхронный электродвигатель с переменной частотой питания статорных обмоток, аналогично частоте вращения ротора.
EGEN, магнитное поле, индукционная катушка статора, обмотка статора, постоянная, магнит, магнит ротора, магнитная индукция, магнитный металл, магнитный поток.
При эксплуатации асинхронных двигателей (АД) повреждения в обмотке ротора (беличьей
Спецификой работы АД является переменная скорость вращения ротора в зависимости от
Сигналы фазных токов снимались с помощью гальванически развязанных датчиков тока и...
Применение датчиков положения ротора для создание... Поэтому вентильный двигатель можно изучать как синхронный электродвигатель с переменной частотой питания статорных обмоток, аналогично частоте вращения ротора.
Применение датчиков положения ротора для создание... Отличие вентильного двигателя от синхронного электродвигателя состоит в том, что частота поля статора в нем изменяема, а определяется частотой вращения ротора частотой сигналов датчика положения ротора...
Косвенный метод определения угловой скорости АД с КЗ ротором без использования датчиков угловых перемещений исключает
В зависимости от диаметра вала, соединительной муфты, номинальной скорости вращения двигателя число меток на маске может меняться.
Это поле увлекает за собой постоянный магнит ротора, заставляя последний вращаться.
Явнополюсные СДПМ имеют неравномерный зазор между статором и ротором и при вращении ротора магнитная проводимость для магнитного потока существенно зависит от угла...
Применение датчиков положения ротора для создание...
1. Магнитное поле, образованное силовым магнитом и магнитное поле... Разработка архитектуры стенда для проведения диагностики...
moluch.ru
 9 УДК 6-89 И. Е. ОВЧИННИКОВ, А. В. ЕГОРОВ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ ПОВОРОТНОЙ ПЛАТФОРМЫ ТЕЛЕСКОПА Предложена математическая модель дискового вентильного двигателя поворотной платформы
9 УДК 6-89 И. Е. ОВЧИННИКОВ, А. В. ЕГОРОВ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ ПОВОРОТНОЙ ПЛАТФОРМЫ ТЕЛЕСКОПА Предложена математическая модель дискового вентильного двигателя поворотной платформы
 Четыре закона электромеханики Содержание: 1. Общие сведения 1.1. Преобразование энергии связано с вращающимися магнитными полями 1.2. Для обеспечения непрерывного преобразования энергии необходимо, чтобы
Четыре закона электромеханики Содержание: 1. Общие сведения 1.1. Преобразование энергии связано с вращающимися магнитными полями 1.2. Для обеспечения непрерывного преобразования энергии необходимо, чтобы
 ПРЕДИСЛОВИЕ ГЛАВА 1. ЦЕПИ ПОСТОЯННОГО ТОКА 1.1.Электрическая цепь 1.2.Электрический ток 1.3.Сопротивление и проводимость 1.4.Электрическое напряжение. Закон Ома 1.5.Связь между ЭДС и напряжением источника.
ПРЕДИСЛОВИЕ ГЛАВА 1. ЦЕПИ ПОСТОЯННОГО ТОКА 1.1.Электрическая цепь 1.2.Электрический ток 1.3.Сопротивление и проводимость 1.4.Электрическое напряжение. Закон Ома 1.5.Связь между ЭДС и напряжением источника.
 Индуктивно-связанные цепи «на ладони» Магнитная связь между двумя катушками появляется, если их потоки взаимно пронизывают витки (часть витков) друг друга. Потокосцеплением называется произведение потока
Индуктивно-связанные цепи «на ладони» Магнитная связь между двумя катушками появляется, если их потоки взаимно пронизывают витки (часть витков) друг друга. Потокосцеплением называется произведение потока
") УДК 621.313 И.Н. РАДИМОВ, канд. техн. наук, В.В. РЫМША, д-р техн. наук, ЧАН ТХИ ТХУ ХЫОНГ, аспирантка (г. Одесса) СОПОСТАВИТЕЛЬНЫЙ АНАЛИЗ КОНСТРУКТИВНЫХ МОДИФИКАЦИЙ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ С ПОСТОЯННЫМИ
УДК 621.313 И.Н. РАДИМОВ, канд. техн. наук, В.В. РЫМША, д-р техн. наук, ЧАН ТХИ ТХУ ХЫОНГ, аспирантка (г. Одесса) СОПОСТАВИТЕЛЬНЫЙ АНАЛИЗ КОНСТРУКТИВНЫХ МОДИФИКАЦИЙ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ С ПОСТОЯННЫМИ
 1 Асинхронные электрические машины Лекции профессора Полевского В.И. Устройство и принцип действия 3- фазных асинхронных двигателей Лекция 1 Асинхронные машины (АМ) в настоящее время являются самыми распространенными
1 Асинхронные электрические машины Лекции профессора Полевского В.И. Устройство и принцип действия 3- фазных асинхронных двигателей Лекция 1 Асинхронные машины (АМ) в настоящее время являются самыми распространенными
 1 Синхронные электрические машины Общие сведения и элементы конструкции Лекции профессора Полевского В.И. Синхронными машинами называются электрические машины переменного тока, у которых магнитное поле,
1 Синхронные электрические машины Общие сведения и элементы конструкции Лекции профессора Полевского В.И. Синхронными машинами называются электрические машины переменного тока, у которых магнитное поле,
 3.4. Электромагнитные колебания Основные законы и формулы Собственные электромагнитные колебания возникают в электрической цепи, которая называется колебательным контуром. Закрытый колебательный контур
3.4. Электромагнитные колебания Основные законы и формулы Собственные электромагнитные колебания возникают в электрической цепи, которая называется колебательным контуром. Закрытый колебательный контур
 МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ «МЭИ» «Утверждаю» Директор
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ «МЭИ» «Утверждаю» Директор
 МЕТОДИЧЕСКОЕ УКАЗАНИЕ 2 системы и технологии» Тема 1. Линейные цепи постоянного тока. 1. Основные понятия: электрическая цепь, элементы электрической цепи, участок электрической цепи. 2. Классификация
МЕТОДИЧЕСКОЕ УКАЗАНИЕ 2 системы и технологии» Тема 1. Линейные цепи постоянного тока. 1. Основные понятия: электрическая цепь, элементы электрической цепи, участок электрической цепи. 2. Классификация
 Тема 5. Трёхфазные электрические цепи Вопросы темы. 1. Принцип построения трехфазной системы. 2. Соединение звездой. 3. Соединение треугольником. 4. Мощность трехфазной системы. 1. Принцип построения трехфазной
Тема 5. Трёхфазные электрические цепи Вопросы темы. 1. Принцип построения трехфазной системы. 2. Соединение звездой. 3. Соединение треугольником. 4. Мощность трехфазной системы. 1. Принцип построения трехфазной
 вестник Югорского государственного университета 2009 г. Выпуск 2 (1). С. 5 9 МОДЕЛИРОВАНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ С УЧЕТОМ ЭЛЕКТРОМАГНИТНЫХ ВИБРОВОЗМУЩАЮЩИХ СИЛ А. В. Беспалов УДК 621.1 Электрическая машина
вестник Югорского государственного университета 2009 г. Выпуск 2 (1). С. 5 9 МОДЕЛИРОВАНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ С УЧЕТОМ ЭЛЕКТРОМАГНИТНЫХ ВИБРОВОЗМУЩАЮЩИХ СИЛ А. В. Беспалов УДК 621.1 Электрическая машина
 Согласно учебному плану направления 241000.62 (18.03.02) «Энерго- и ресурсосберегающие процессы в химической технологии, нефтехимии и биотехнологии», профиль «Охрана окружающей среды и рациональное использование
Согласно учебному плану направления 241000.62 (18.03.02) «Энерго- и ресурсосберегающие процессы в химической технологии, нефтехимии и биотехнологии», профиль «Охрана окружающей среды и рациональное использование
 Сборник задач для специальности ОП 251 1 Электрическое поле. Задания средней сложности 1. Два точечных тела с зарядами Q 1 =Q 2 = 6 10 11 Кл расположены в воздухе на расстоянии 12 см друг от друга. Определить
Сборник задач для специальности ОП 251 1 Электрическое поле. Задания средней сложности 1. Два точечных тела с зарядами Q 1 =Q 2 = 6 10 11 Кл расположены в воздухе на расстоянии 12 см друг от друга. Определить
 Министерство образования и науки Российской Федерации Саратовский государственный технический университет КОМПЕНСАЦИЯ РЕАКТИВНОЙ МОЩНОСТИ Методические указания к лабораторной работе по спецкурсу «Проектирование
Министерство образования и науки Российской Федерации Саратовский государственный технический университет КОМПЕНСАЦИЯ РЕАКТИВНОЙ МОЩНОСТИ Методические указания к лабораторной работе по спецкурсу «Проектирование
 7. АСИНХРОННЫЕ ДВИГАТЕЛИ 7.1. Основные понятия Асинхронные машины относятся к классу электрических машин переменного тока. Мощность асинхронных машин может быть от долей ватта до нескольких тысяч киловатт.
7. АСИНХРОННЫЕ ДВИГАТЕЛИ 7.1. Основные понятия Асинхронные машины относятся к классу электрических машин переменного тока. Мощность асинхронных машин может быть от долей ватта до нескольких тысяч киловатт.
 1 5 Электрические колебания 51 Колебательный контур Колебаниями в физике называют не только периодические движения тел но и всякий периодический или почти периодический процесс в котором значения той или
1 5 Электрические колебания 51 Колебательный контур Колебаниями в физике называют не только периодические движения тел но и всякий периодический или почти периодический процесс в котором значения той или
 ТРЕХФАЗНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ. 1. Достоинства трехфазной цепи. 2. Принцип получения трехфазной ЭДС. 3. Соединение трехфазной цепи звездой. 4. Назначение нейтрального провода. 5. Соединение трехфазной цепи
ТРЕХФАЗНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ. 1. Достоинства трехфазной цепи. 2. Принцип получения трехфазной ЭДС. 3. Соединение трехфазной цепи звездой. 4. Назначение нейтрального провода. 5. Соединение трехфазной цепи
 МИНИСТЕРСТВО ОБРЗОВНИЯ И НУКИ РФ ФЕДЕРЛЬНОЕ ГОСУДРСТВЕННОЕ БЮДЖЕТНОЕ ОБРЗОВТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНЛЬНОГО ОБРЗОВНИЯ УФИМСКИЙ ГОСУДРСТВЕННЫЙ ВИЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КОМПЛЕКТ ТТЕСТЦИОННЫХ
МИНИСТЕРСТВО ОБРЗОВНИЯ И НУКИ РФ ФЕДЕРЛЬНОЕ ГОСУДРСТВЕННОЕ БЮДЖЕТНОЕ ОБРЗОВТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНЛЬНОГО ОБРЗОВНИЯ УФИМСКИЙ ГОСУДРСТВЕННЫЙ ВИЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КОМПЛЕКТ ТТЕСТЦИОННЫХ
 Тема 4.. Цепи переменного тока Вопросы темы.. Цепь переменного тока с индуктивностью.. Цепь переменного тока с индуктивностью и активным сопротивлением. 3. Цепь переменного тока с ёмкостью. 4. Цепь переменного
Тема 4.. Цепи переменного тока Вопросы темы.. Цепь переменного тока с индуктивностью.. Цепь переменного тока с индуктивностью и активным сопротивлением. 3. Цепь переменного тока с ёмкостью. 4. Цепь переменного
 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. 1. Общие сведения о машинах переменного тока.. Вращающееся магнитное поле. 3. Устройства и принцип действия асинхронного двигателя. 4. Влияния скольжения на ЭДС,
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. 1. Общие сведения о машинах переменного тока.. Вращающееся магнитное поле. 3. Устройства и принцип действия асинхронного двигателя. 4. Влияния скольжения на ЭДС,
 Задачник для специальности АП251 1 Электрическое поле Тесты для самоконтроля 1.Как изменится сила взаимодействия между двумя заряженными телами с зарядами Q и д, если при q = const заряд Q увеличить в
Задачник для специальности АП251 1 Электрическое поле Тесты для самоконтроля 1.Как изменится сила взаимодействия между двумя заряженными телами с зарядами Q и д, если при q = const заряд Q увеличить в
 МИНИСТЕРСТВО ОБРАЗОВАНИЯ СТАВРОПОЛЬСКОГО КРАЯ ГОУ СПО "Минераловодский колледж железнодорожного транспорта" С.А. Иванская ЭЛЕКТРОТЕХНИКА Методические рекомендации по освоению теоретического материала и
МИНИСТЕРСТВО ОБРАЗОВАНИЯ СТАВРОПОЛЬСКОГО КРАЯ ГОУ СПО "Минераловодский колледж железнодорожного транспорта" С.А. Иванская ЭЛЕКТРОТЕХНИКА Методические рекомендации по освоению теоретического материала и
docplayer.ru
Создание вращающего момента вентильного электродвигателя
Основными исполнительными устройствами в электромеханической системе наиболее универсальными управляемыми свойствами и эксплуатационными показателями обладают бесконтактные двигатели постоянного тока (БДПТ). Бесконтактный двигатель постоянного тока — это электрическая машина постоянного тока, в которой механический коллектор заменен полупроводниковым коммутатором (ПК), поэтому его также называют вентильный электродвигатель. Первые серии которых были созданы в пятидесятых годах двадцатого века посредством замены щеточно-коллекторного узла двигателя постоянного тока на более надежный полупроводниковый коммутатор. Бесконтактные двигатели постоянного тока работают в условиях вакуума и агрессивных сред, экономичны и более быстроходны, чем двигатели щеточного типа, весьма гибки в управлении, а срок их службы практически ограничен износом подшипникового узла. Большой вклад в теорию и практику создания и совершенствования бесконтактных двигателей постоянного тока, а также управления ими внесли инженеры и ученые И. Е. Овчинников, Н. И. Лебедев, Ш. И. Лутидзе, A. A. Дубенский, В. К. Лозенко, A. M. Бертинов, В. А. Балагуров, Д. А. Бут, М. Г. Чиликин.
На сегодняшний день разработка и исследование электромеханических систем с бесконтактными двигателями постоянного тока в качестве объекта управления преобладает все большее значение, что характерно существующими преимуществами по сроку службы, особенностью работы в суровых условиях эксплуатации, универсальностью регулировочных качеств, а также достаточной легкостью в управлении. Разнообразие имеющих и разрабатываемых бесконтактных двигателей способствовала за собой появление огромного числа разных схем управления этими двигателями.
Необходимо отметить, что основное внимание исследователей сосредоточено на решении основных вопросов по построения отдельных узлов бесконтактных двигателей постоянного тока и их конструктивного усовершенствования. Условно меньшее количество работ посвящено аспектом по проектированию совершенно новых универсальных алгоритмов и средств управления электромеханическими системами с применением бесконтактных двигателей постоянного тока, направленных на улучшение их энергетических показателей.
В этой связи в области управления электромеханическими системами с бесконтактными двигателями постоянного тока возникает ряд вопросов и связанных с ними проблем теоретического и прикладного характера, для решения которых необходимо проведение соответствующих исследований.
Таким образом, проблема создания новых высоконадежных электромеханическими системами с бесконтактными двигателями постоянного тока, работающих по ряду параметров оптимально, а также разработки соответствующих алгоритмов и средств улучшения качество функционирующих процессов и динамических характеристик, реализующих принцип энергосберегающих технологий, является актуальной.
Данный электродвигатель в конструктивно полностью соответствует синхронному электродвигателю, возбуждение которого осуществляется от постоянных магнитов, размещенных на роторе. Однако питание фаз статорных обмоток вентильного двигателя осуществляется не от сети переменного тока, а постоянным током через полупроводниковый коммутатор (ПК) (рис 1.). Полупроводниковый коммутатор по сигналам логического устройства (ЛУ) поочередно, и в определенной порядочности, попарно запутывает фазы статорных обмоток электродвигателя, создавая вращающееся поле статора, которое, взаимодействуя с полем постоянных магнитов (МП) ротора, создает вращающий момент ЭД: Мд=КФIя, где Ф — поток постоянного магнита, расположенного на роторе, Iя — ток статорных обмоток (ток якоря), К — постоянный для данного ЭД коэффициент.
Материал магнита — на основе редкоземельных элементов (РЗМ) — самария и кобальта или на основе магнитных материалов. Магниты на основе редкоземельных материалов обладают большими магнитными силами, и не подвержены размагничиванию магнитными полями, создаваемыми токами статорных обмоток при статических или динамических перегрузках электродвигателя.
Переключение фаз статора должно производиться при определенных, согласованных с ними, положениях ротора. Поэтому на валу ЭД обычно располагается датчик положения ротора (ДПР), формирующий сигналы DA, DB, DC, которые используются логическое устройства (ЛУ) для формирования команд управления полупроводниковым коммутатором (ПК).
Отличие вентильного двигателя от синхронного электродвигателя состоит в том, что частота поля статора в нем изменяема, а определяется частотой вращения ротора частотой сигналов датчика положения ротора, используемых для управления полупроводниковым коммутатором, определяется частотой вращения ротора. Поэтому вентильный двигатель можно изучать как синхронный электродвигатель с переменной частотой питания статорных обмоток, аналогично частоте вращения ротора. Тем самым, поле статора вынужденно по сигналам датчика положение ротора одновременно вращается с ротором, что дает возможность в теоретическом плане для изучения вентильного двигателя использовать теорию двух реакций, при исследовании синхронных электродвигателей обычной конструкции. В то же время происходящие действия и механическая характеристика вентильного двигателя такие же, как у обычных коллекторно-щеточных двигателей постоянного тока, следовая этому средние за период параметры вентильных двигателей могут быть достаточно точно охарактеризовать их уравнениями.
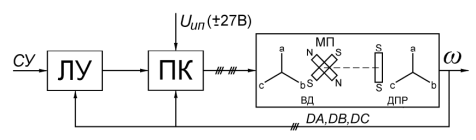
Рис. 1. Функциональная схема вентильного электродвигателя
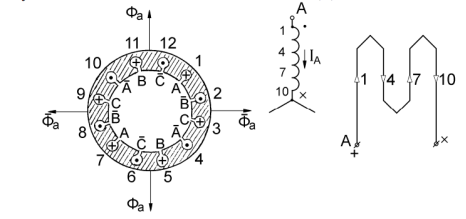
Рис. 2. Схема размещения обмотки и магнитных потоков фазы А (Фа)

Рис. 3. Векторная диаграмма магнитного поля

Рис. 4. Моментные характеристики бесконтактного двигателя постоянного тока
Массовое и энергетические характеристики вентильного двигателя при использовании современных мощных магнитов высокой энергии превышают показатели коллекторных двигателей постоянного тока, особенно при создании следящих электроприводов, регулируемых от внешних сигналов управления (СУ) различных самолетных систем (систем управления рулями, рукоятками управления и др.).
При этом вентильный двигатель не имеет недостатков от обычных двигателей постоянного тока, связанных с применением у них щеточно-коллекторного узла:
Обратим внимание на процесс образования вращающего момента винтельнлго двигателя на примере 4-х полюсного электродвигателя, статор которого содержит z=12 пазов, в которых размещена трёхфазная обмотка (m1=3) c числом пазов на полюс и фазу q=1, т. е:2=2p•q•m=4•1•3=12 (см. Рис. 2).
Каждая из обмоток намотана таким образом, чтобы втекающий в нее ток создавал по правилу буравчика четыре магнитных потока, расположенных под углом 90° друг к другу (Рис. 2.а).
Обозначение индексов A, B, C внутри каждого сектора на (рис. 2) означают, что ток в соответствующей фазе направлен от нас. Индексы А, В, С означают, что ток в соответствующей фазе течет к нам. Аналогично можно построить векторы магнитных потоков для фазы В и фазы С и совместить их на одном рисунке (рис. 3).
При работе каждая фаза создает четыре вектора, то при m=3 число таких векторов равно 12, они в пространстве по окружности статора смещены на 360°/12=30° геометрических градусов. Если порядок обхода векторов соответствует цифровому обозначению 30-ти градусных секторов (1…12), в этом случае будет соответствовать вращению поля статора и ротора по часовой стрелке (правое движение). Для удобства исследование стрелки всех векторов на (рис. 3) направлены к периферии, поэтому у векторов, у которых изменено направление стрелки, в обозначении введены отрицания.
На (рис. 3) произведено геометрическое сложение соседних векторов: так сложение векторов А и В дает вектор АВ, С и В — вектор СВ и т. д.
Заметим, что такое сложение векторов соответствует физическому процессу включения фаз: одновременно всегда включены только какие-либо 2 фазы, но в одну ток втекает (здесь А), а через другую вытекает (фазы В или С).
Заметим также, что при поочередном обходе векторов каждая фаза работает на интервале двух секторов (у рассмотренных векторов АВ и СВ фаза В с вытекающим током работает в секторах 1 и 2).
Рассматривая диаграмму (рис. 3) совместно с магнитными потоками, создаваемыми постоянным магнитом (рис. 4), можно увидеть что при каждом включении очередной пары фаз (рис. 4) А и В они при взаимодействии с постоянными магнитами создают четыре притягивающих (при разной полярности) и четыре отталкивающих (при одноименных полюсах) момента (Мп и М0): Мп=Mmax•Sina, M0=Mmax•cosa, и суммарный момент на валу электродвигателя составит: Me=4Mmax•(sina+cosa), где a — угол взаимного расположения полей магнита и якоря.
На основании векторной диаграммы магнитного поля (рис. 3) и его моментных характеристик можно сделать дополнительно следующие выводы:
Основные термины (генерируются автоматически): вентильный двигатель, ток, полупроводниковый коммутатор, двигатель, магнитное поле, частота вращения ротора, якорная обмотка, синхронный электродвигатель, вентильный электродвигатель, фаза В.
moluch.ru
Под вентильным двигателем понимают систему регулируемого электропривода, состоящую из электродвигателя переменного тока, конструктивно подобного синхронной машине, вентильного преобразователя и устройств управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения.
Двигателям постоянного тока присущи серьезные недостатки, обусловленные, главным образом, наличием щеточно-коллекторного аппарата.
Недостаточная надежность коллекторного аппарата, необходимость его периодического обслуживания.
Ограниченные величины напряжения на якоре и, следовательно, мощности двигателей постоянного тока, что ограничивает их применение для высокоскоростных приводов большой мощности.
Ограниченная перегрузочная способность двигателей постоянного тока, ограничение темпа изменения тока якоря, что существенно для высокодинамичных электроприводов.
В вентильном двигателе указанные недостатки не проявляются, поскольку здесь щеточно-коллекторный коммутатор заменен бесконтактным коммутатором, выполненным на тиристорах (для приводов большой мощности) или на транзисторах (для приводов мощностью до 200 кВт). Исходя из этого, вентильный двигатель, который конструктивно выполняется на базе синхронной машины, часто называют бесконтактным двигателем постоянного тока. По управляемости вентильный двигатель также подобен двигателю постоянного тока – его скорость регулируется изменением величины подводимого постоянного напряжения. Благодаря своим хорошим регулировочным качествам вентильные двигатели получили широкое применение для привода различных промышленных машин и механизмов.
Вентильный двигатель рассматриваемого типа выполнен на базе трехфазной синхронной машины с постоянными магнитами на роторе. Трехфазные обмотки статора питаются постоянным током, подаваемым поочередно в две последовательно соединенные фазные обмотки. Переключение обмоток производится транзисторным коммутатором, выполненным по трехфазной мостовой схеме. Транзисторные ключи открываются и закрываются в зависимости от положения ротора двигателя. Схема вентильного двигателя представлена на рис.6.23.
Момент, создаваемый двигателем, определяется взаимодействием двух потоков: статора Ф1, создаваемого током в обмотках статора, и ротора Ф2, создаваемого высокоэнергетическими постоянными магнитами (на основе сплавов самарий-кобальт и других).
, (6.27)
где: θ – пространственный угол между векторами потоков статора и ротора;
рп – число пар полюсов.
Магнитный поток статора стремится повернуть ротор с постоянными магнитами, так, чтобы поток ротора совпал по направлению с потоком статора (вспомним магнитную стрелку компаса).
Наибольший момент, создаваемый на валу ротора, будет при угле между векторами потоков, равным 900, и будет уменьшаться до нуля по мере сближения векторов потоков. Эта зависимость показана на рис.6.24.
Рассмотрим пространственную диаграмму векторов потоков, соответствующую двигательному режиму (при числе пар полюсов рп=1). Предположим, что в данный момент включены транзисторы VT3 и VT4, (см. схему рис.6.23). Тогда ток проходит через обмотку фазы В и в обратном направлении через обмотку фазы А. Результирующий вектор м.д.с. статора будет занимать в пространстве положение F3 (см. рис.6.25). Если ротор занимает в этот момент положение, показанное на рис.6.26, то двигатель будет развивать в соответствии с (6.27) максимальный момент, под действием которого ротор будет поворачиваться по часовой стрелке. По мере уменьшения угла θ момент будет уменьшаться. Когда ротор повернется на 300, необходимо в соответствии с графиком на рис.6.24. переключить ток в фазах двигателя, так, чтобы результирующий вектор м.д.с. статора занял положение F4 (см. рис.6.25). Для этого нужно отключить транзистор VT3 и включить транзистор VT5. И далее следует переключать транзисторы в порядке возрастания номеров.
Переключение фаз выполняет транзисторный коммутатор VT1-VT6, управляемый от датчика положения ротора DR; при этом угол θ поддерживается в пределах 900±300, что соответствует максимальному значению момента с наименьшими пульсациями. При рп=1 за один оборот ротора должно быть произведено шесть переключений, благодаря которым м.д.с. статора совершит полный оборот (см. рис.6.25). При числе пар полюсов больше единицы поворот вектора м.д.с. статора, а, следовательно, и ротора, составит 360/рп градусов.
Регулирование величины момента производится изменением величины м.д.с. статора, т.е. изменением средней величины тока в обмотках статора
, (6.28)
где: R1 – сопротивление обмотки статора.
Поскольку поток двигателя постоянен, то э.д.с. Ея, наводимая в двух последовательно включенных обмотках статора будет пропорциональна скорости ротора. Уравнение электрического равновесия для цепей статора будет
. (6.29)
где: L1 – индуктивность обмотки статора.
При отключении ключей ток в обмотках статора мгновенно не исчезает, а замыкается через обратные диоды и фильтровый конденсатор С.
Следовательно, регулируя напряжение питания двигателя U1, можно регулировать величину тока статора и момента двигателя
. (6.30)
Нетрудно заметить, что выражения (6.28 - 6.30) подобны аналогичным выражениям для двигателя постоянного тока, вследствие чего механические характеристики вентильного двигателя в данной схеме подобны характеристикам двигателя постоянного тока независимого возбуждения при Ф=const.
Изменение напряжения питания вентильного двигателя в рассматриваемой схеме производится методом широтно-импульсного регулирования. Изменяя скважность импульсов транзисторов VT1-VT6 в периоды их включенного состояния с помощью регулятора Reg, можно регулировать среднюю величину напряжения, подаваемого на обмотки статора двигателя.
Для осуществления режима торможения алгоритм работы транзисторного коммутатора должен быть изменен таким образом, чтобы вектор м.д.с. статора отставал от вектора потока ротора. Для этого нужно изменить U1 до значения U1<Eя. Тогда момент двигателя станет отрицательным. Поскольку на входе преобразователя установлен неуправляемый выпрямитель, то рекуперация энергии торможения в сеть в данной схеме невозможна. При торможении происходит подзаряд конденсатора фильтра С. Ограничение напряжения на конденсаторах осуществляется путем подключения разрядного сопротивления через транзистор VT7. Таким образом, энергия торможения рассеивается в разрядном сопротивлении.
studfiles.net
Количество просмотров публикации Момент вращения вентильного электродвигателя - 142
Рассмотрим формирование кривой вращающего момента на примере двухфазного двухполюсного вентильного электродвигателя. Соосно с обмотками статора имеем два чувствительных элемента (ЧЭ) датчика положения. Пусть в исходном состоянии ось полюсов ротора совпадает с осью фазы А (в системе координатных осей , рис.11.1.
Сигнальный элемент (СЭ) датчика положения ротора (ДПР), перекрывающий зону , входит в область чувствительного элемента ДП1 и вырабатывает сигнал на включение фазы В на постоянное напряжение источника питания. Число сигнальных секторов равно числу пар полюсов ротора. В общем случае ширина зоны действия сигнального элемента
где - число пар полюсов, - число фаз (секции) обмотки статора. Пусть по фазе В протекает ток в положительном направлении и создает магнитный поток Фа Взаимодействие потоков статора и ротора создает вращающий момент
где - угол между векторами потоков ротора и обмотки статора, k, k -конструктивные коэффициенты, Iа - ток фаз обмотки статора.
Очевидно,- что при повороте ротора на угол момент , создаваемый фазой В, уменьшается до нуля. В это время сигнальный элемент датчика положения ротора входит в область чувствительного элемента ДП2 и вырабатывает сигнал на включение фазы А. Момент вращения максимален. Осуществляется поворот ротора еще на . В случае если в качестве чувствительного элемента взяты датчики Холла, а в качестве сигнальных элементов - постоянные магниты, то при повороте ротора на угол тс под ДП1 меняется полярность магнита͵ а ЭДС датчика Холла меняет знак. ДП1 вырабатывает сигнал на включение фазы В, но с другой полярностью прикладываемого напряжения. Направление момента вращения сохраняется и ротор поворачивается на очередной угол . Кривая момента вращения представлена на рис. 11.2,а.
Имеет место существенная пульсация вращающего момента в пределах оборота ротора, которая вызывает соответствующую пульсацию частоты вращения. Вместе с тем, при включении напряжения только на одну катушку при ряде положений ротора может оказаться, что момент вращения меньше момента сопротивления и двигатель вращаться не будет.
Пульсации момента вращения можно существенно уменьшить, расширив зону действия сигнального элемента до . В этом случае через каждые одновременно включены обе фазы на период . Кривая момента представлена на рис.11.2,6. Таким образом обеспечивается достаточно большой пусковой момент при любом положении ротора. Учитывая синусоидальное распределение кривой момента вращения каждой катушки исходя из положения ротора, кривую момента можно еще сгладить путем сдвига чувствительных элементов на угол , рис.11.2, в. Проблема пульсаций момента имеет значение только на малых скоростях, особенно для безредукторных приводов.
Формирование кривых фазного напряжения трехфазного вентильного электродвигателя с трансформаторными датчиками взаимного положения ротора и фаз статора описано в /41/.
При пуске вентильного электродвигателя () по мере разгона ротора появляется и возрастает ЭДС, наводимая в фазах обмотки статора. Эта ЭДС противодействует напряжению сети, приложенному к фазам обмотки статора, и уменьшает ток фаз, что приводит к снижению вращающего момента. Когда вращающий момент уравновесит момент сопротивления, частота вращения ротора достигнет установившегося значения. Изменения момента сопротивления вызывают соответствующие изменения частоты вращения ротора, так же как это происходит в двигателях постоянного тока. Изменение частоты вращения ротора приводит к соответствующим изменениям частоты переключения транзисторов коммутатора и соответственно к такому же изменению частоты вращения поля статора. Ротор и поле статора имеют одинаковую синхронную частоту вращения. Эта частота вращения зависит от значения напряжения, подаваемого на фазы обмотки статора и от значения статического момента сопротивления.
В /50/ дается следующая зависимость для расчета момента вращения вентильного электродвигателя (все величины берутся в о.е.)
Где - относительное значение питающего напряжения, - относительное значение электромагнитной постоянной времени, - относительное значение угловой частоты вращения ротора, - угол установки ДПР (обычно ).
Уравнение (11.2) наглядно показывает влияние индуктивности обмотки статора на форму механической характеристики. Характерным является увеличение нелинейности характеристики с возрастанием индуктивности обмотки. В случае если принять = 0, то получим в системе относительных величин уравнение аналогичное основному уравнению исполнительного двигателя постоянного тока (8.25):
Механические характеристики бесконтактного электродвигателя постоянного тока, рассчитанные по (11.2), представлены на рис.11.3. Как видно в двигательном режиме (1 и 3 - й квадранты) механические характеристики симметричны относительно начала координат и достаточно линейны, причем в тем большей степени, чем меньше . В тормозных режимах (2 и 4 - й квадранты) характеристики не линейны и при больших наблюдается неустойчивость.
Штриховыми линиями на рис. 11.3 показана граница устойчивости при Тэ=1.
Вентильные электродвигатели имеют большую перегрузочную способность (), что объясняется использованием редкоземельных магнитов. Нелинейность механических характеристик не превышает 10%. В большинстве случаев можно считать, что механические характеристики бесконтактного вентильного электродвигателя, работающего в двигательном режиме, совпадают с характеристиками двигателя постоянного тока.
referatwork.ru
Союз Соеетскнк
Соцналнстнческнк
Республик
ОПИСАНИЕ
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
959226 (61) Дополнительное к авт. свид-ву . (22) 3а а еНо 03Й180 (2 ) 2999838/24-07 с присоединением заявки Мо(23) Приоритет—
Опубликовано 150982. Бюллетень Но 34
{И) М. Кл.
Н 02 К 29/02
Гасударственный комитет
СССР но делам изобретений и открытий (33) УДК621. 813. .13.014.2т621.. .382(088.8) Дата опубликования описания
Ю.Г.Соколов, Л.Я.Зиннер и В.В.До охин (р т)
ЛЙ» я ! ! fj ling
Казанский химико-технологический ина щт т йм Q.М.E (72) Авторы изобретения (7! ) Заявитель (54) ВЕНТИЛЬНЫЙ ДВИГАТЕЛЬ
Изобретение относится к электротехнике, в частности к вентильным двигателям постоянного тока с бесконтактной коммутацией в функции положения ротора.
Известны электрические машины постоянного тока с управляемой демп- . ферной обмоткой (УДО), которая выполнена по типу основной обмотки и уложена в те же пазы якоря. Секции
УДО подключены к встречно-параллельно включенным тиристорам, которые включаются при входе секций основной обмотки в зону коммутации 1).
Недостатком .данной схемы является то, что УДО замкнута накоротко через встречно-параллельно включенные тиристоры и используется только для демпфирования. Цепь УДО электрически не связана с коммутационным контуром и,следовательно, ток этой цепи не может протекать встречно току выходящей из работы секции по коммутирующему ее элементу и ускорять выключение последнего.
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является вентильный двигатель с питанием от мостового инвертора с двухступенчатой коммутацией резонансным контуром, состоящим иэ дросселей и конденсаторов $2).
Недостатком вентильного двигателя выполненного по этой схеме является то, что относительно большая индуктивность его якорной обмотки обусловливает довольно большой угол коммутации V что приводит к значительному снижению среднего вращающего момента двигателя. Кроме того, у двигателя сравнительно большая установленная мощность коммутирующих конденсаторов и дросселей инвертора двигателя.
15 цель изобретения — увеличение удельного вращающего момента и снижение установленной мощности коммутирующих элементов инвертора.
Поставленная цель достигается тем, что в вентильном двигателе, содержащем тП -фазную обмотку,. якоря, подключенную к источнику постоянного тока через ттт-фазный мостовой ти25 ристорный инвертор с двухступенчатой коммутацией резонансными контурами, состоящими иэ индуктивностей и емкостей каждая индуктивность резонансных контуров или часть ее располо30 жена на якоре и выполнена так, что
959226 ее ось совпадает с осью коммутируемых секций обмотки якоря.
На фиг. 1 представлена принципиальная электрическая схема одного из вариантов вентильного двигателя; .на фиг. 2 — диаграммы рабочих напря- 5 жений и токов двигателя, где ct,ä, напряжения, подаваемые от инвертора на фазы А,ВС двигателя; z o,Š— токи протекающие по фазам; зк — фазные
ЭДС; — линейные ЭДС; к,,м- напряжения10 на конденсаторах; н — ток через конденсатор. Двигатель содержит трехфазную якорную обмотку 1-3 на статоре и обмотку 4 возбуждения на роторе.Обмотки якоря соединены звездой, а выводы ее А,В,С через соответствующие пары тиристоров 5 и б; 7 и 8; 9 и 10 мостового инвертора подключены к шинам 1.1 и 12 источника постоянного напряжения. В те же пазы статора вместе с основной обмоткой 1-3 уложены управляемые демпферные обмотки
13-15, которые в данном случае являются и коммутирующими дросселями резонансных контуров инвертора.Каждая из этих обмоток уложена таким образом, чтобы она охватывала магнитные готоки двух соседних фаз якоря двигателя. Один конец каждой управляемой демпферной обмотки (например, 13) соединен с выводом соответствующей фазы основной обмотки А и с соответствующей парой тиристоров
5 и б инвертора, а другой конец через соответствующие конденсаторы 16-18 и пары тиристоров 19 и 20 дополнительного коммутатора, состоящего из тиристоров 19-24 подключены к шинам питающего напряжения 11 и 12, Инвертор содержащий тиристоры 5-10 40 содержит также обратный диодный мост
25-30. Обмотка 4 возбуждения двигателя подключена к независимому источнику постоянного напряжения 31 через скользящие контакты 32 и 33.
Двигатель работает следующим образом.
Пусть ротор двигателя вращается
-по часовой стрелке (фиг.1} .Конденсаторы 16-18 заряжены с полярностью, указанной по схеме (фиг. 1)в скобках.
„ В инт=. эвале времени 0 — t ток л протекает по -à"ëåäóþùåé цепи: плюс источника питания (П), тиристор 5, фазы двигателя А и Э,тиристор 8, минус источника питания 12. Начиная с некоторого момента ток переклю" чается с фазы Б на фазу С двигателя.
Известно, что переключение тока с
ЭДС двух переключаемых фаз (Й и 06
8 вд,анном случае), когда линейная ЭДС больше нуля и имеет направление 65 соответствующего необходимому направлению коммутации тока. Это условие выполняется, например, для момента tq, определяемого углом опережения включения вентилей Pi = Э + Д .
Таким образом, в момент t от
:датчика положения ротора подается сигнал на включение тиристоров 10 и
22. В этом случае образуются два короткозамкнутых контура: коммутационный — с элементами 2, 3, 10 и 8 и демпферный — c элементами 14, 17, 22 и 8. Здесь протекают два процесса,способствующих быстрому выключению выходящего иэ работы тиристора 8.
Контур 14, 17, 22 и 8 демпфирует поток коммутируемых фаз 3 и С (2 и 3), в результате чего резко снижается индуктивность коммутационного контура 2,3, 10 и 8 и под действием линейной ЭДС в нем быстро нарастает,ток, направленный встречно току выходящего из работы тиристора
8. Снижение индуктивности коммутационного контура и угла коммутации приводит к увеличению вращающего момента двигателя.
В демпферном контуре ввиду малости его сопротивления быстро нарастает ток, обусловленный напряжением на обмотке 14 и разрядом и переразрядом конденсатора 17 (полярность после перезаряда указана без скобок на фиг, 1). Ток этого контура также направлен встречно току тиристора 8 и способствует выключению последнего.
С момента закрытия тиристора 8 реактивная мощность выключаемой фазы В (2) рассеивается по контуру 1, 2, 27 и 5, а процесс перезаряда конденсатора 17 заканчивается по контуру 17, 22, 28 и 14.
С момента t работают фазы Д и С (1 и 3). После поворота ротора двигателя на 60 эл. град. в момент подается сигнал на включение тиристоров 7 и 19, для перевода тока с фазы А на фазу B . Образуются два других короткозамкнутых контура: коммутационный — 2,1,5 и 7 и демпферный — 13 5, 19 и 16. Токи обоих этих контуров, в первом под действием линейной ЭДС P. дЗ,а во втором под действием напряжения демпферной обмотки 13, кондейсатора 16, протекают встречно току выходящего из работы тиристора 5, способствуя выключению последнего. Полярность конденсатора после перезаряда указана без скобок на фиг. 1.
Кроме того, за счет демпфирующему воздействию обмотки 13 индуктивность коммутационного контура сильно уменьшается в результате чего ток в фазе Д быстро убывает, а в фазе 3 быстро нарастает.
В момент закрытия тиристора 5 реактивная мощность включаемой фазы
959226 рассеивается в контуре l, 3, 10 и
26, а процесс перезаряда конденсатора 16 заканчивается по контуру
l6, 13, 25,.19, С момента t
С момента включаются тиристоры
9 и 21, а в момент t> тиристоры 8 и 20 для перевода тока соответствен но с фазы 3 на фазу С и с фазы А на фазу 3
Электромагнитные процессы коммутации для моментов t,, t
С момента весь описанный выше процесс переключаний начинает повторяться. 20
В предложенной схеме (фиг. 1) вен тильного двигателя в качестве индуктивности колебательного контура инвертора используется только индуктивность демпферной обмотки. 25
В случае, когда этой индуктивности окажется недостаточно для условий коммутации тиристоров инвертора ее можно увеличить последовательным соединением демпферной обмотки с добавочным дросселем.
Формула изобретения
Вентильный двигатель, содержащий
tn-фаэную обмотку якоря, подключенную к источнику постоянного тока через щ-фаэный мостовой тиристорный инвер» тор с двухступенчатой коммутацией резонансными контурами, содержащими россели и конденсаторы, о т л и ч а.ю шийся тем, что, с целью увеличения удельного вращающего момента двигателя и снижения установленной мощности коммутирующих элементов инвертора, по крайней мере часть обмотки каждого иэ дросселей резонансных контуров расположена на якоре и их оси совпадают с осями коммутационных контуров обмотки яко я.
Источники информациИ, принятые во внимание пои экспертизе
1. Авторское свидетельство СССР
Р 560300, кл. Н 02 К 23/38, 1973.
2.. Глебов И.A. и др. Вентильные преобразователи в цепях электрических машин. Л., Наука, с. 54.
1971
959226
И4 ф .3 д
Составитель А.Санталов
Редактор Н.Воловик Техред A.Av Корректор О.Билак
Заказ 7022/73 Уираа 721 Подписное
ВПИИПИ Государственного .комитета СССР по делам изобретений и открытий
113035, Москва, й-35, Раушская наб., д. 4/5
Филиал ППП Патент, r. Уагород, ул. Проектная, 4





www.findpatent.ru
Для того чтобы решать задачи по контролю современных прецизионных систем, все чаще используется вентильный двигатель. Это характеризуется большим преимуществом таких приборов, а также активным формированием вычислительных возможностей микроэлектроники. Как известно, они могут обеспечить высокую плотность длительного момента и энергоэффективности по сравнению с другими видами двигателей.
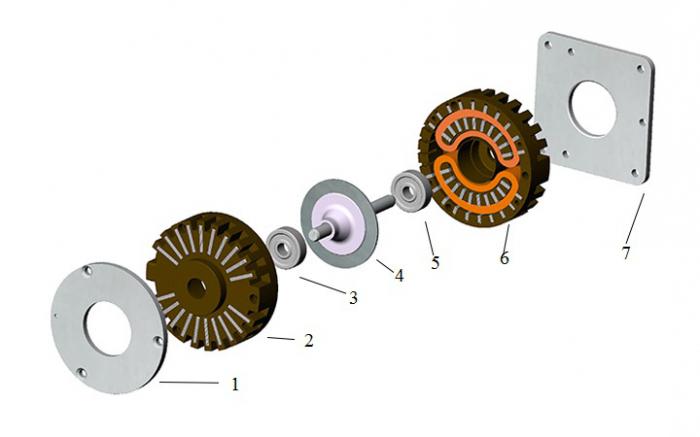
Двигатель состоит из следующих деталей:
1. Задняя часть корпуса.2. Статор.3. Подшипник.4. Магнитный диск (ротор).5. Подшипник.6. Статор с обмоткой.7. Передняя часть корпуса.
У вентильного двигателя имеется взаимосвязь между многофазной обмоткой статора и ротора. У них присутствуют постоянные магниты и встроенный датчик положения. Коммутация прибора реализовывается при помощи вентильного преобразователя, вследствие чего он и получил такое название.
Схема вентильного двигателя состоит из задней крышки и печатной платы датчиков, втулки подшипника, вала и самого подшипника, магнитов ротора, изолирующего кольца, обмотки, трельчатой пружины, промежуточной втулки, датчика Холла, изоляции, корпуса и проводов.
В случае соединения обмоток «звездой» устройство имеет большие постоянные моменты, поэтому такую сборку применяют для управления осями. В случае скрепления обмоток «треугольником» их можно использовать для работы с большими скоростями. Чаще всего количество пар полюсов вычисляется численностью магнитов ротора, которые помогают определить соотношение электрических и механических оборотов.
Статор может быть изготовлен с безжелезным или железным сердечником. Используя такие конструкции с первым вариантом, можно обеспечить отсутствие притяжения магнитов ротора, но и в это же мгновение снижается на 20% эффективность двигателя из-за уменьшения значения постоянного момента.
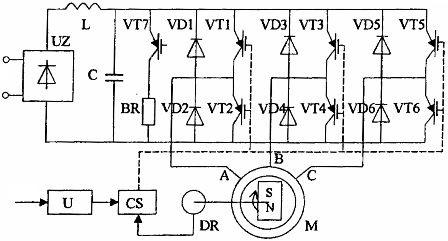
Со схемы видно, что в статоре ток образуется в обмотках, а в роторе создается при помощи высокоэнергетических постоянных магнитов.Условные обозначения:- VT1-VT7 - транзисторные коммуникаторы;- A, B, C – фазы обмоток;- M – момент двигателя;- DR – датчик положения ротора;- U – регулятор напряжения питания двигателя;- S (south), N (north) – направление магнита;- UZ – частотный преобразователь;- BR – датчик частоты вращения;- VD – стабилитрон;- L – катушка индуктивности.
Схема двигателя показывает, что одним из основных преимуществ ротора, в котором установлены постоянные магниты, является уменьшение его диаметра и, как следствие, сокращение момента инерции. Такие приспособления могут быть встроенными в сам прибор или расположенными на его поверхности. Понижение этого показателя очень часто приводит к небольшим значениям баланса момента инерции самого двигателя и приведенного к его валу нагрузки, который и усложняет работу привода. По этой причине производители могут предложить стандартный и повышенный в 2-4 раза момент инерции.
На сегодняшний день становится очень популярным вентильный двигатель, принцип работы которого основан на том, что контролер устройства начинает коммутировать обмотки статора. Благодаря этому вектор магнитного поля остается всегда сдвинутым на угол, приближающийся к 900 (-900) относительно ротора. Контролер рассчитан на управление током, который движется через обмотки двигателя, в том числе и величиной магнитного поля статора. Следовательно, можно регулировать момент, который воздействует на прибор. Показатель угла между векторами может определить направление вращения, которое действует на него.
Нужно учитывать, что речь идет об электрических градусах (они значительно меньше геометрических). Для примера приведем расчет вентильного двигателя с ротором, который в себе имеет 3 пары полюсов. Тогда оптимальным его углом будет 900 /3=300. Эти пары предусматривают 6 фаз обмоток коммутации, тогда получается, что вектор статора может перемещаться скачками по 600. Из этого видно, что настоящий угол между векторами обязательно будет варьироваться в пределах от 600 до 1200, начиная с вращения ротора.
Вентильный двигатель, принцип работы которого основывается на обороте фаз коммутации, из-за которых поток возбуждения поддерживается относительно постоянным движением якоря, после их взаимодействия начинает формировать вращающийся момент. Он устремляется повернуть ротор таким способом, чтобы все потоки возбуждения и якоря совпали воедино. Но во время его разворота датчик начинает переключать обмотки, и поток перемещается на следующий шаг. В этот момент результирующий вектор сдвинется, но останется полностью неподвижным сравнительно с потоком ротора, что в итоге и создаст вращающий момент вала.
Применяя вентильный двигатель в работе, можно отметить такие его достоинства:
- возможность применения широкого диапазона для модифицирования частоты вращения;
- высокая динамика и быстродействие;
- максимальная точность позиционирования;
- небольшие затраты на техническое обслуживание;
- устройство можно отнести к взрывозащищенным объектам;
- имеет способность переносить большие перегрузки в момент вращения;
- высокий КПД, который составляет более 90%;
- имеются скользящие электронные контакты, которые существенно увеличивают рабочий ресурс и срок службы;
- при длительной работе нет перегрева электродвигателя.
Несмотря на огромное количество достоинств, вентильный двигатель также имеет и недостатки в эксплуатации:- довольно сложное управление электродвигателем;- относительно высокая цена устройства из-за применения в его конструкции ротора, который имеет дорогостоящие постоянные магниты.

Вентильно-индукторный двигатель – это устройство, в котором предусмотрено переключающееся магнитное сопротивление. В нем преобразование энергии происходит за счет изменения индуктивности обмоток, которые располагаются на явно выраженных зубцах статора при передвижении зубчатого магнитного ротора. Питание устройство получает от электрического преобразователя, поочередно переключающего обмотки двигателя в строгости по перемещению ротора.
Вентильно-индукторный двигатель представляет собой комплексную сложную систему, в которой работают совместно разнообразные по своей физической природе компоненты. Для удачного проектирования таких устройств необходимы углубленные знания в области конструирования машин и механики, а также электроники, электромеханики и микропроцессорной техники.
Современное устройство выступает как электродвигатель, действующий совместно с электронным преобразователем, который изготавливается по интегральной технологии с использованием микропроцессора. Он позволяет осуществить качественное управление двигателем с наилучшими показателями переработки энергии.
Такие устройства обладают высокой динамикой, большой перегрузочной способностью и точным позиционированием. Благодаря тому что в них отсутствуют движущие части, их использование возможно во взрывоопасной агрессивной среде. Такие моторы также называют и бесколлекторными, их основным преимуществом, по сравнению с коллекторными, является скорость, которая зависит от напряжения питания нагружающего момента. Также еще одним немаловажным свойством считается отсутствие истираемых и трущихся элементов, которые переключают контакты, благодаря чему вырастает ресурс пользования аппаратом.
Все двигатели постоянного тока можно назвать бесколлекторными. Они работают от сети с постоянным током. Щеточный узел предусмотрен для электрического объединения цепей ротора и статора. Такая деталь является самой уязвимой и достаточно сложной в обслуживании и ремонте.
Вентильный двигатель постоянного тока работает по тому же принципу, что и все синхронные устройства такого типа. Он представляет собой замкнутую систему, включающую силовой полупроводниковый преобразователь, датчик положения ротора и координатор.
Такие устройства получают свое питание от сетей переменного тока. Скорость вращения ротора и движения первой гармоники магнитной силы статора полностью совпадают. Данный подтип двигателей можно использовать при высоких мощностях. К этой группе относятся шаговые и реактивные вентильные аппараты. Отличительной особенностью шаговых устройств является дискретное угловое смещение ротора при его работе. Питание обмоток формируется при помощи полупроводниковых компонентов. Управление вентильным двигателем осуществляется при последовательном смещении ротора, которое и создает переключение его питания с одних обмоток на другие. Это устройство можно разделить на одно-, трех- и многофазные, первые из которых могут содержать пусковую обмотку или фазосдвигающую цепь, а также запускаться вручную.
Вентильный синхронный двигатель работает на основе взаимодействия магнитных полей ротора и статора. Схематически магнитное поле при вращении можно изобразить плюсами этих же магнитов, которые движутся со скоростью магнитного поля статора. Поле ротора также возможно изобразить как постоянный магнит, который делает обороты синхронно с полем статора. В случае отсутствия внешнего вращающего момента, который прикладывается к валу аппарата, оси полностью совпадают. Воздействующие силы притяжения проходят вдоль всей оси полюсов и могут компенсировать друг друга. Угол между ними приравнивается к нулю.
В случае если на вал машины будет воздействовать тормозной момент, то ротор перемещается в сторону с запаздыванием. Благодаря этому силы притяжения разбиваются на составляющие, которые направляются вдоль оси плюсовых показателей и перпендикулярно к оси полюсов. Если будет прикладываться внешний момент, который создает ускорение, то есть начинает действовать по направлению вращения вала, картинка по взаимодействию полей полностью изменится на обратную. Направленность углового смещения начинает трансформироваться на противоположное, и в связи с этим меняется направление тангенциальных сил и воздействие электромагнитного момента. При таком раскладе двигатель становится тормозным, а аппарат работает как генератор, который подводимую к валу механическую энергию преобразует в электрическую. Далее она перенаправляется в сеть, питающую статор.
Когда будет отсутствовать внешний, явнополюсный момент начнет принимать положение, при котором ось полюсов магнитного поля статора будет совпадать с продольной. Это размещение станет соответствовать минимальному сопротивлению потока в статоре.
В случае воздействия на вал машины тормозного момента ротор отклонится, при этом магнитное поле статора будет деформированным, так как поток стремится замкнуться по наименьшему сопротивлению. Для его определения необходимы силовые линии, направленность которых в каждой из точек будет соответствовать движению действия силы, поэтому изменение поля приведет к появлению тангенциального взаимодействия.
Рассмотрев все эти процессы в синхронных двигателях, можно выявить демонстративный принцип обратимости разнообразных машин, то есть возможность любого электрического аппарата изменить направленность преобразованной энергии на противоположную.
Вентильный двигатель с постоянными магнитами используется для решения серьезных оборонных и промышленных задач, так как такое устройство имеет большой запас мощности и эффективности.
Эти приборы чаще всего применяются в отраслях, где необходимы сравнительно низкие потребляющие мощности и небольшие габариты. Они могут иметь самые разные габариты, без технологических ограничений. В то же время большие аппараты не являются совершенно новыми, их чаще всего производят компании, которые стремятся преодолеть экономические трудности, ограничивающие ассортимент этих приборов. У них есть свои преимущества, среди которых можно отметить высокую эффективность из-за потерь в роторе и большую плотность мощности. Для управления бесколлекторными двигателями нужен частотно-регулируемый привод.
Анализ по затратам и результатам показывает, что устройства с постоянными магнитами намного предпочтительнее, по сравнению с другими, альтернативными технологиями. Чаще всего они используются для отраслей промышленности с достаточно тяжелым распорядком работы судовых двигателей, в военной и оборонной отрасли и других подразделениях, число которых непрерывно возрастает.
Вентильно-реактивный двигатель работает с использованием двухфазных обмоток, которые установлены вокруг диаметрально противоположных полюсов статора. Подача питания продвигается к ротору в соответствии с полюсами. Таким образом, его противодействие полностью сводится к минимуму.
Вентильный двигатель, своими руками созданный, обеспечивает высокоэффективную скорость привода при оптимизированном магнетизме для работы с реверсом. Информация о месторасположении ротора используется для того, чтобы управлять фазами подачи напряжения, так как это является оптимальным для достижения непрерывного и плавного крутящего момента и высокой эффективности.
Сигналы, которые выдает реактивный двигатель, накладываются на угловую ненасыщенную фазу индуктивности. Минимальное сопротивление полюса полностью соответствует максимальной индуктивности устройства.
Положительный момент можно получить только при углах, когда показатели позитивные. На небольших скоростях фазный ток обязательно должен быть ограниченным, чтобы произвести защиту электроники от высоких вольт-секунд.Механизм преобразования можно иллюстрировать линией реактивной энергии. Мощностная сфера характеризует собой питание, которое преобразовывается в механическую энергию. В случае его резкого отключения избыточная или остаточная сила возвращается к статору. Минимальные показатели влияния магнитного поля на производительность устройства являются основным его отличием от похожих устройств.
Источник: fb.ruКомментарии
 Идёт загрузка...
Идёт загрузка... Похожие материалы
 Домашний уют Частотные преобразователи для асинхронных двигателей: принцип работы и эксплуатация
Домашний уют Частотные преобразователи для асинхронных двигателей: принцип работы и эксплуатацияСегодня в промышленности очень часто используются частотные преобразователи для асинхронных двигателей. Стоит заметить, что такие моторы имеют в своей конструкции три обмотки, которые соединяются по схеме «звезд...
 Домашний уют Можно ли собирать частотные преобразователи своими руками? Принцип работы и схема подключения частотных преобразователей
Домашний уют Можно ли собирать частотные преобразователи своими руками? Принцип работы и схема подключения частотных преобразователейИзготовить частотные преобразователи своими руками довольно сложно, так как необходимо очень хорошо разбираться в силовой электронике и полупроводниковой технике. Но перед тем как задуматься о проектировании данного у...
 Домашний уют Печи пиролизные своими руками: устройство, принцип работы и схема сборки
Домашний уют Печи пиролизные своими руками: устройство, принцип работы и схема сборкиЕсли еще несколько десятков лет назад единственным вариантом отопления для многих были уголь и дрова, то сегодня есть газ. Тем не менее данное природное топливо иногда подвести не представляется возможным. Скажем, в н...
 Технологии Аккумуляторные батареи: устройство, эксплуатация, принцип работы и схема
Технологии Аккумуляторные батареи: устройство, эксплуатация, принцип работы и схемаАвтономные источники электроэнергии являются одними из самых полезных изобретений человечества. Что такое телефон или радио, в которых не установлены аккумуляторные батареи? Устройство многих приспособлений, а также у...
 Автомобили Устройство пневмоподвески: описание, принцип работы и схема
Автомобили Устройство пневмоподвески: описание, принцип работы и схемаВ конструкции автомобиля имеется множество систем и механизмов. Одна из таких – это ходовая часть. Она может быть зависимой и независимой, на продольных и поперечных рычагах, с пружинами либо рессорами. В сегодн...
 Автомобили Автомобильный статор генератора: описание, принцип работы и схема
Автомобили Автомобильный статор генератора: описание, принцип работы и схемаБез электрооборудования не может «прожить» ни один современный автомобиль. И основным компонентом из всего электрооборудования является самый главный источник – генератор. В свою очередь, он содержит...
 Автомобили Задний тормозной суппорт: устройство, принцип работы и схема
Автомобили Задний тормозной суппорт: устройство, принцип работы и схемаПожалуй, одна из самых ответственных систем в конструкции любого автомобиля – это тормоза. Именно от их качества работы и состояния зависит безопасность водителя, пассажиров и других участников движения. Еще как...
 Автомобили ВАЗ-2110: регулятор напряжения: принцип работы, устройство, схема и замена
Автомобили ВАЗ-2110: регулятор напряжения: принцип работы, устройство, схема и заменаВеличина электрического напряжения, вырабатываемого автомобильным генератором, не постоянна и зависит от количества оборотов коленчатого вала. Для того чтобы ее стабилизировать, предназначен специальный регулятор. О н...
 Автомобили Двигатель турбо: описание, характеристики, принцип работы и фото
Автомобили Двигатель турбо: описание, характеристики, принцип работы и фотоКаждый автомобилист знает, что двигатели внутреннего сгорания по своему устройству и принципу действия разделяются на атмосферные и турбированные. Но не все понимают, в чем разница между этими силовыми агрегатами. Дав...
 Автомобили ВАЗ-2114 бензонасос: принцип работы, устройство, схема и типичные поломки
Автомобили ВАЗ-2114 бензонасос: принцип работы, устройство, схема и типичные поломкиВ современных автомобилях, а ВАЗ-2114 именно таковым и является, вместо карбюраторной системы питания установлен инжектор. Также машина укомплектована современным инжекторным двигателем. Еще одно важное устройство в с...
monateka.com





