Содержание
Принцип работы трехфазного асинхронного двигателя, устройство и принцип действия.
22.11.2018
Трехфазный асинхронный двигатель является наиболее распространённым типом моторов. В таком электродвигателе на статоре устанавливается трехфазная обмотка, что обуславливает его название.
СОДЕРЖАНИЕ:
- Конструкция
- Принцип действия
- Режим работы
- Преимущества
КОНСТРУКЦИЯ ТРЕХФАЗНОГО асинхронного ДВИГАТЕЛЯ
Основная задача двигателя — это превращение электрической энергии в механическую. Конструкция его состоит из двух основных элементов таких как ротор (подвижная часть) и статор (неподвижная часть).
Между ними находиться воздушный зазор. Оба этих элемента имеют в себе сердечники, где размещается специальные витки обмотки. В роторе они располагаются на валу, а в статоре в специальных пазах на корпусе.
Пазы, на которых крепиться обмотка имеют угловое расстояние между собой в 120 градусов. Наиболее распространённым является система с короткозамкнутым ротором или как ее называют «беличье колесо». В этом случае обмотка крепиться на каркас цилиндрической формы, а стержни соединяются с сердечником ротора и накоротко замыкаются с торцов.
Наиболее распространённым является система с короткозамкнутым ротором или как ее называют «беличье колесо». В этом случае обмотка крепиться на каркас цилиндрической формы, а стержни соединяются с сердечником ротора и накоротко замыкаются с торцов.
Помимо короткозамкнутого также используются и двигатели с фазным ротором. В этом случае фазы обмотки присоединяется к специальным контактным кольцам, а их концы изолируются друг от друга и от вала. При всем этом статоры в обоих представленных видах могут не отличаться конструкционно.
Существует несколько схем соединения трехфазных обмоток между собой. Основными способами являются т.н. «звезда» и «треугольник». Иногда устанавливаются и комбинированные варианты. Подбор схемы зависит от напряжения питания в сети. В первом случае концы фаз обмоток соединены в одной точке. Во втором — конец каждой фазы поочередно соединяется с началом следующей.
ПРИНЦИП ДЕЙСТВИЯ
Работа асинхронного двигателя основывается на вращении магнитных полей.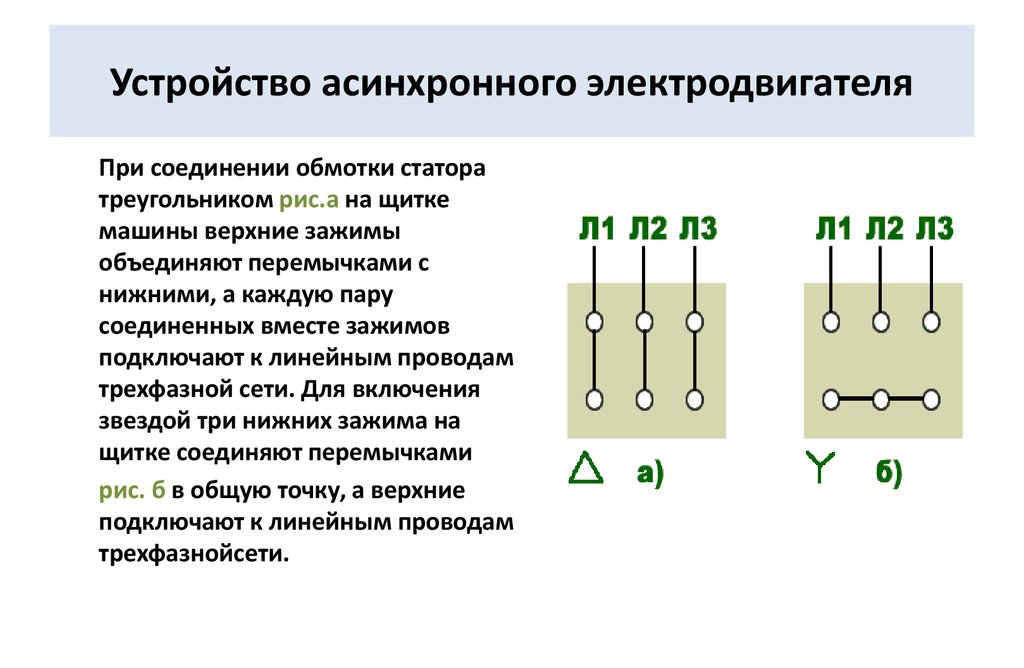 С помощью тока в обмотке статора создается движущееся магнитное поле, которое воздействует на контур ротора и индуцирует в нем электродвижущую силу. Если этот показатель выше силы трения, то вал приводиться в движение.
С помощью тока в обмотке статора создается движущееся магнитное поле, которое воздействует на контур ротора и индуцирует в нем электродвижущую силу. Если этот показатель выше силы трения, то вал приводиться в движение.
Ротор увеличивает частоту вращения пытаясь догнать скорость вращения магнитных полей обмотки статора. Однако, когда этот параметр сравниваеться то электродвижущая достигает нулевого значения и магнитное воздействие пропадает.
Поэтому частота вращение вала никогда не совпадает (не синхронна) с частотой движущихся магнитных полей. Из-за этого двигатель называют асинхронным.
РЕЖИМЫ РАБОТЫ
Трехфазный электродвигатель асинхронного типа имеет несколько возможных режимов работы:
- Пуск.
- Двигательный режим.
- Холостой ход.
- Генераторный режим.
- Электромагнитное торможение.
Пуск является начальным этапом работы любого двигателя. В этом режиме на обмотку пускается ток и создаются вращающиеся магнитные поля. В момент, когда сила трения меньше электродвижущей — ротор начинает вращение.
В момент, когда сила трения меньше электродвижущей — ротор начинает вращение.
Двигательный режим выполняет основную задачу электродвигателя, то есть превращает электродвижущую силу в механическое вращение вала.
Холостой ход происходит, когда на валу отсутствует нагрузка, то есть он не подсоединен к другим устройствам.
Генераторный режим включается, когда обороты вала принудительно, например, с помощью другого двигателя, превышают скорость вращения электромагнитного поля. В этом случае электродвижущая сила имеет обратный вектор и двигатель превращается в источник активной энергии.
Электромагнитное торможение происходит, когда искусственно изменяют направление вращения электромагнитного поля и ротора на противоположные. Происходит довольно быстрое торможение. Применяется только в экстренных случаях, так как выделяется огромное количество тепла.
ПРЕИМУЩЕСТВА ТРЕХФАЗНОГО АСИНХРОННОГО ДВиГАТЕЛЯ
Трёхфазный двигатель также может работать в однофазном режиме, когда это потребуется. Однако номинальная мощность при этом понижается приблизительно вдвое.
Однако номинальная мощность при этом понижается приблизительно вдвое.
В случае пропадания одной из фаз двигатель продолжит работу и даже будет возможен запуск, но с пониженной мощностью. Относительная дешевизна, хороший КПД и надежность поспособствовали тому, что такие моторы заслужили наибольшую популярность во всем мире.
На нашем сайте вы сможете найти электродвигали для любых ситуаций. В каталогах представлены моторы таких мировых лидеров как Siemens, ABB, Lenze, а также VEM motors.
На страницах нашего блога также можно также ознакомиться с другими типами асинхронных моторов >>>ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ <<< или более подробно узнать о конструкции электродвигателей >>> ВИДЫ ЭЛЕКТРОДВИГАТЕЛЕЙ <<<
Подписывайтесь на наши обновления:
Асинхронный электродвигатель. Устройство и принцип действия. – www.
 motors33.ru
motors33.ru
Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами. Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.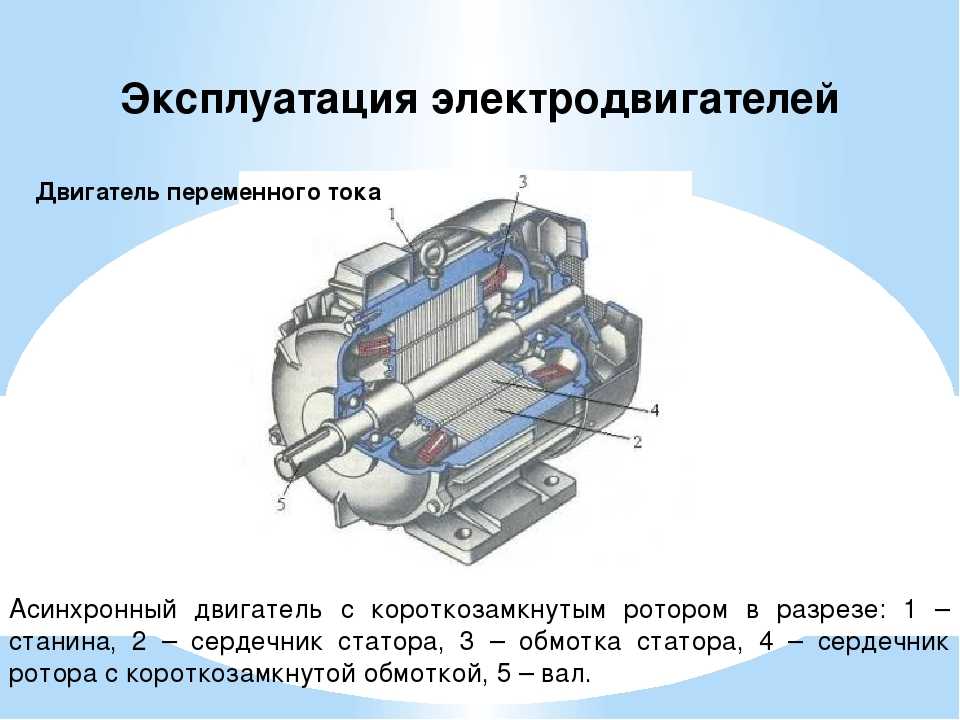
Рис. 1. Различные виды обмотки статора асинхронных электродвигателей
На рис. 1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
На рис. 1, б) показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис.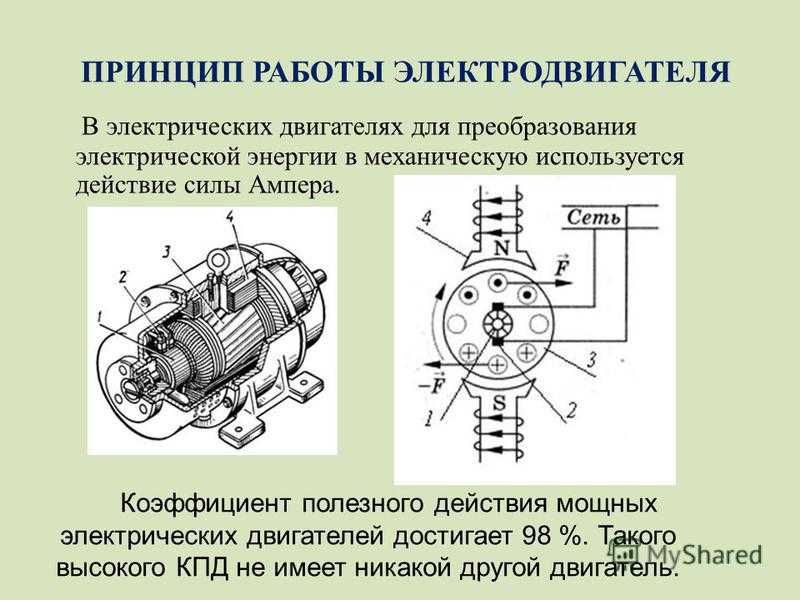 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Рис. 3. Короткозамкнутый ротор
а — ротор с короткозамкнутой обмоткой, б — «беличье колесо»,
в — короткозамкнутый ротор, залитый алюминием;
1 — сердечник ротора, 2 — замыкающие кольца, 3 — медные стержни,
4 — вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко.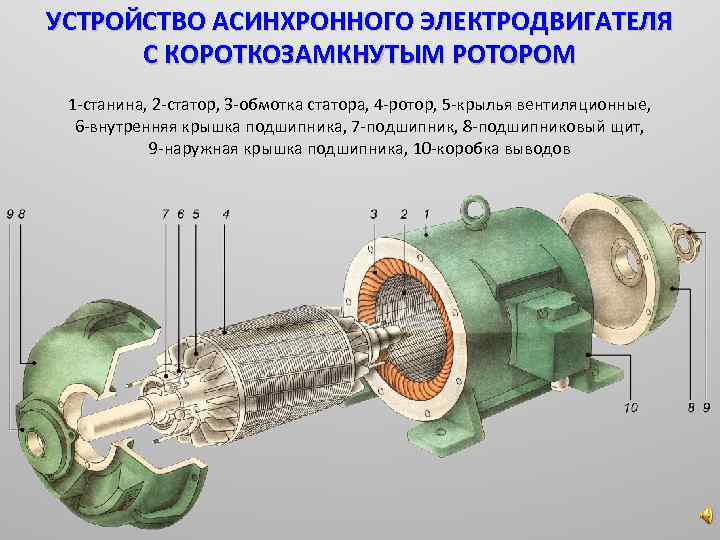 Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими электродвигателями заключается в устройстве ротора.
Рис. 4. Разрез асинхронного двигателя с фазным ротором
1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие.
Изд. 10-е, перераб. «Высшая школа», 1970.
Асинхронный двигатель с короткозамкнутым ротором: конструкция, принцип работы
Учитывая то, что электроснабжение традиционно осуществляется путём доставки потребителям переменного тока, понятно стремление к созданию электромашин, работающих на поставляемой электроэнергии. В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
Секрет такой популярности состоит, прежде всего, в простоте конструкции и дешевизне его изготовления. У электромоторов на короткозамкнутых роторах есть и другие преимущества, о которых вы узнаете из данной статьи. А для начала рассмотрим конструктивные особенности этого типа электрических двигателей.
Конструкция
В каждом электромоторе есть две важных рабочих детали: ротор и статор. Они заключены в защитный кожух. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
Конструкции статоров рассматриваемых электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока. Сердечники статора, предназначенного для работы при трехфазном напряжении, располагаются по кругу под углом 120º. На них устанавливаются обмотки из изолированной медной проволоки определённого сечения, которые соединяются треугольником или звездой. Конструкция магнитопровода статора жёстко крепится на стенках цилиндрического корпуса.
Сердечники статора, предназначенного для работы при трехфазном напряжении, располагаются по кругу под углом 120º. На них устанавливаются обмотки из изолированной медной проволоки определённого сечения, которые соединяются треугольником или звездой. Конструкция магнитопровода статора жёстко крепится на стенках цилиндрического корпуса.
Строение электродвигателя понятно из рисунка 1. Обратите внимание на конструкцию обмоток без сердечника в короткозамкнутом роторе.
Рис. 1. Строение асинхронного двигателя с КЗ Ротором
Немного по-другому устроен ротор. Конструкция его обмотки очень похожа на беличью клетку. Она состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности в качестве короткозамкнутых обмоток ротора можно увидеть применение медных стержней. У этого металла низкое удельное сопротивление, но он дороже алюминия. К тому же медь быстрее плавится, а это не желательно, так как вихревые токи могут сильно нагревать сердечник.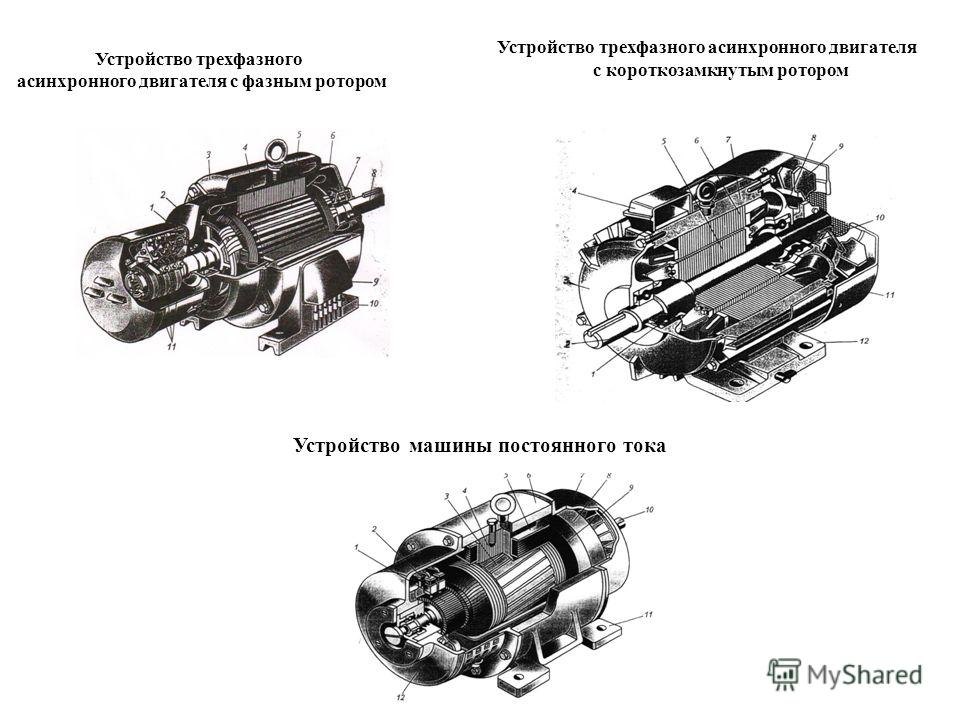
Конструктивно стержни расположены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, а проводники обмотки впрессовывают (заливают) в пазы магнитопровода. При этом нет необходимости в изоляции пазов сердечника. На рисунке 2 показано фото ротора с КЗ обмотками.
Рис. 2. Ротор асинхронного двигателя с КЗ обмотками
Пластины магнитопроводов таких роторов не требуют лаковой изоляции поверхностей. Они очень просты в изготовлении, что удешевляет себестоимость асинхронных электродвигателей, доля которых составляет до 90% от общего числа электромоторов.
Ротор асинхронно вращается внутри статора. Между этими деталями устанавливаются минимальные расстояния в виде воздушных зазоров. Оптимальный зазор находится в пределах от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз асинхронные электродвигатели можно разделить на три типа:
- однофазные;
- двухфазные;
- трёхфазные.


Они отличаются количеством и расположением обмоток статора. Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Двухфазные двигатели имеют две перпендикулярно расположенных обмотки статора, на каждую из которых поступает переменный ток. Их часто используют в однофазных сетях – одну обмотку подключают напрямую к фазе, а для питания второй применяют фазосдвигающий конденсатор. Без этой детали вращение вала асинхронного электродвигателя самостоятельно не начнётся. В связи с тем, что конденсатор является неотъемлемой частью двухфазного электромотора, такие двигатели ещё называют конденсаторными.
В конструкции однофазного электродвигателя используют только одну рабочую обмотку. Для запуска вращения ротора применяют пусковую катушку индуктивности, которую через конденсатор кратковременно подключают к сети, либо замыкают накоротко. Эти маломощные моторчики используются в качестве электрических приводов некоторых бытовых приборов.
Эти маломощные моторчики используются в качестве электрических приводов некоторых бытовых приборов.
Принцип работы
Функционирование асинхронного двигателя осуществляется на основе свойства трёхфазного тока, способного создавать в обмотках статора вращающее магнитное поле. В рассматриваемых электродвигателях синхронная частота вращения электромагнитного поля связана прямо пропорциональной зависимостью с собственной частотой переменного тока.
Существует обратно пропорциональная зависимость частоты вращения от количества пар полюсов в обмотках статора. Учитывая то, что сдвиг фаз составляет 60º, зависимость частоты вращения ротора (в об/мин.) можно выразить формулой:
n1 = (f1*60) / p, где n1 – синхронная частота, f1 – частота переменного тока, а p – количество пар полюсов.
В результате действия магнитной индукции на сердечник ротора, в нём возникнет ЭДС, которая, в свою очередь, вызывает появление электрического тока в замкнутом проводнике.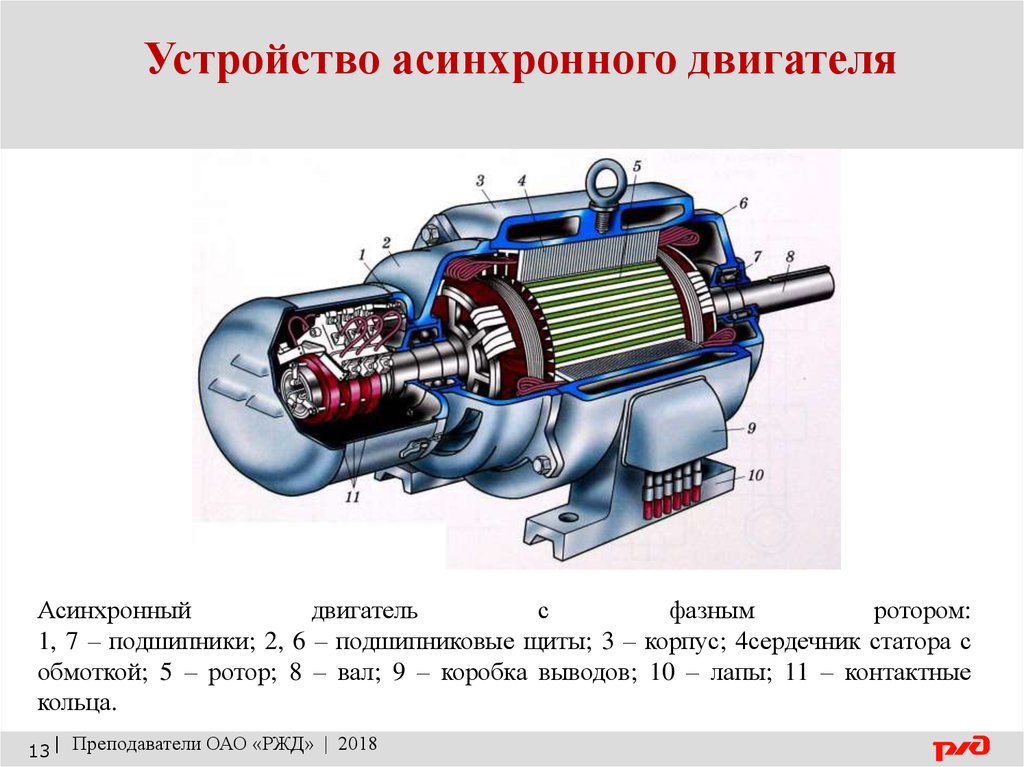 Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Разницу частот вращения магнитных полей называют частотой скольжения: ns=n1–n2, а относительную величину s, характеризующую отставание, называют скольжением.
s = 100% * ( ns / n1) = 100% * (n1 – n2) / n1 , где ns – частота скольжения; n1, n2 – частоты вращений статорных и роторных магнитных полей соответственно.
С целью уменьшения гармоник ЭДС и сглаживания пульсаций момента силы, стержни короткозамкнутых витков немного скашивают. Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Скольжение зависит от того, какую механическую нагрузку приложено к валу двигателя. В асинхронных электромоторах изменение параметров скольжения происходит в диапазоне от 0 до 1. Причём в режиме холостого хода набравший обороты ротор почти не испытывает активного сопротивления. S приближается к нулю.
Увеличение нагрузки способствует увеличению скольжения, которое может достигнуть единицы, в момент остановки двигателя из-за перегрузки. Такое состояние равносильно режиму короткого замыкания и может вывести устройство из строя.
Относительная величина отставания соответствующая номинальной нагрузке электрической машины называется номинальным скольжением. Для маломощных электромоторов и двигателей средней мощности этот показатель изменяется в небольших пределах – от 8% до 2%. При неподвижности ротора электродвигателя скольжение стремится к 0, а при работе на холостом ходу оно приближается к 100%.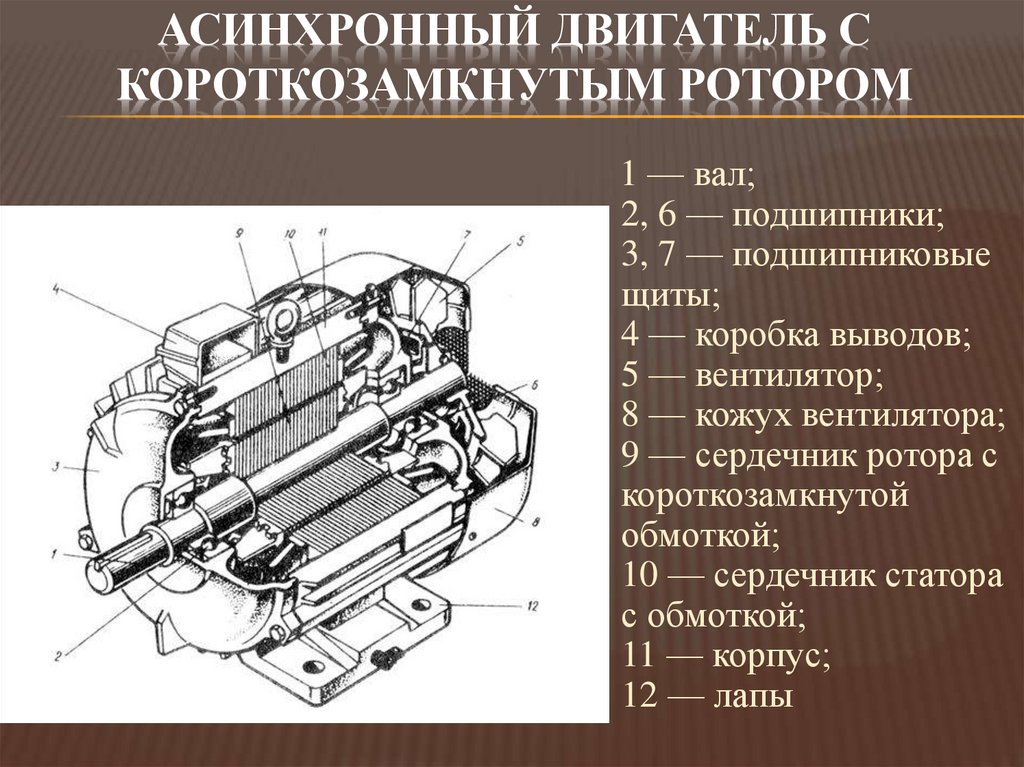
Во время запуска электромотора его обмотки испытывают нагрузку, что приводит к резкому увеличению пусковых токов. При достижении номинальных мощностей электрические двигатели с короткозамкнутыми витками самостоятельно восстанавливают номинальную частоту ротора.
Обратите внимание на кривую крутящего момента скольжения, изображённую на рис. 3.
Рис. 3. Кривая крутящего момента скольжения
При увеличении крутящего момента коэффициент s изменяется от 1 до 0 (см. отрезок «моторная область»). Возрастает также скорость вращения вала. Если скорость вращения вала превысит номинальную частоту, то крутящий момент станет отрицательным, а двигатель перейдёт в режим генерации (отрезок «генерирующая область»). В таком режиме ротор будет испытывать магнитное сопротивление, что приведёт к торможению мотора. Колебательный процесс будет повторяться, пока не стабилизируется крутящий момент, а скольжение не приблизится к номинальному значению.
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.

Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Основные технические характеристики
В зависимости от класса электродвигателя, его технические характеристики меняются. В рамках данной статьи не ставится задача приведения параметров всех существующих классов двигателей. Мы остановимся на описании основных технических характеристик для электромоторов классов 56 А2 – 80 В2.
В этом небольшом промежутке на линейке моделей эелектромоторов с короткозамкнутыми роторами можно отметить следующее:
Мощность составляет от 0,18 кВт (класс 56 А2) до 2,2 кВт (класс 80 В2).
Ток при максимальном напряжении – от 0,55 А до 5А.
КПД от 66% до 83%.
Частота вращения вала для всех моделей из указанного промежутка составляет 3000 об./мин.
Технические характеристики конкретного двигателя указаны в его паспорте.
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника. Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.
Рис. 4. Схемы подключения
Для подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы.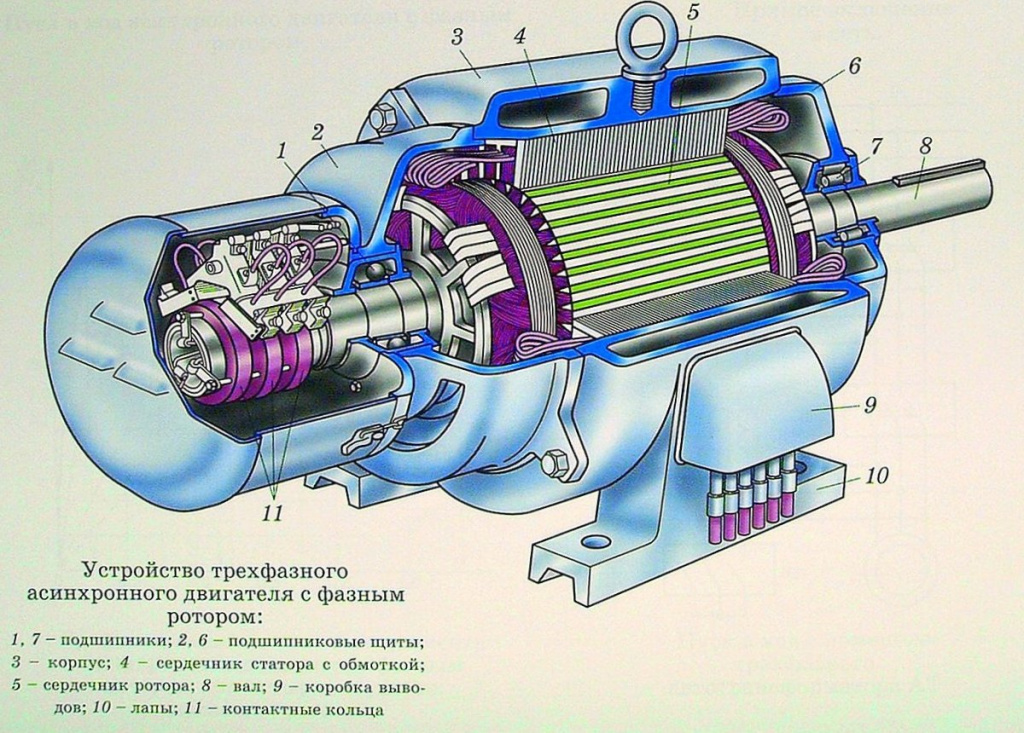 Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
Рис. 5. Примеры схем подключений в однофазную сеть
С целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.
Каков принцип действия трехфазного асинхронного двигателя кратко
Содержание
- Асинхронный двигатель принцип работы
- Асинхронный двигатель: что это
- Трехфазный асинхронный двигатель. Принцип работы
- Однофазный асинхронный двигатель
- Двухфазный асинхронный двигатель
- Схемы подключения
- Треугольник
- Звезда
- Функциональные и эксплуатационные особенности
- Как производятся расчеты
- Асинхронный электродвигатель: принцип работы и устройство
- Устройство асинхронного электродвигателя
- Принцип работы асинхронного двигателя
- Преимущества асинхронных двигателей
- Каков принцип действия трехфазного асинхронного двигателя кратко
- Каков принцип действия трехфазного асинхронного двигателя кратко
- Немного истории
- Устройство трехфазного двигателя
- Принцип работы трехфазного двигателя
- Устройство плавного пуска
- Хорошие и плохие свойства асинхронных моторов
- Видео
Асинхронный двигатель принцип работы
Среди разнообразия выпускаемых на сегодняшний день типов электрических моторов большое распространение получили асинхронные двигатели. Их мощность и эффективность обеспечивает использование в деревообрабатывающей и металлообрабатывающей промышленности, в насосных агрегатах, на фабриках, в станках и ручном электрическом инструменте.
Их мощность и эффективность обеспечивает использование в деревообрабатывающей и металлообрабатывающей промышленности, в насосных агрегатах, на фабриках, в станках и ручном электрическом инструменте.
Асинхронный двигатель: что это
Асинхронный двигатель – это асинхронная электрическая машина, применяемая для преобразования электрической энергии в механическую. Асинхронный дословно означает неодновременный – здесь имеется в виду, что у асинхронного двигателя магнитное поле всегда имеет большую частоту вращения, чем ротор, который словно пытается его догнать. Работают эти машины от сетей с переменным током.
Любой асинхронный двигатель состоит из двух ключевых составляющих: ротора и статора. Эти части не контактируют между собой и отделены друг от друга воздушным зазором, в котором формируется подвижное магнитное поле.
Статор асинхронной машины состоит из следующих частей:
Конструкция ротора состоит из основного блока с вентиляционной крыльчаткой, опирающегося на подшипники. Связь ротора с приводимым в движение механизмом обеспечивается с помощью прямого подключения, редукторов или других способов передачи механической энергии. В асинхронных двигателях используются два вида роторов:
Связь ротора с приводимым в движение механизмом обеспечивается с помощью прямого подключения, редукторов или других способов передачи механической энергии. В асинхронных двигателях используются два вида роторов:
Рекомендуем посмотреть это видео. Оно хоть и старое, но интересное и познавательное. Позволит закрыть непонятные моменты.
Трехфазный асинхронный двигатель. Принцип работы
Принцип действия асинхронного двигателя заключается во взаимном расположении обмоток и трехфазном напряжении, что приводит к возникновению вращающегося магнитного поля, которое и выступает движущей силой.
Подробнее говоря, при подаче питания на первичную обмотку, на фазах образуются три магнитных потока, изменяющихся в зависимости от частоты входного напряжения. Они смещены между собой не только в пространстве, но и во времени, благодаря чему и появляется вращающийся магнитный поток.
Во время вращения результирующий поток создает ЭДС в роторных проводниках. По причине того, что обмотка ротора представляет собой замкнутую цепь, в ней создается ток, создающий пусковой момент в направлении вращения магнитного поля статора. Это приводит к вращению ротора после превышения пусковым моментом его тормозного момента. Наблюдаемое в этот момент явление называется скольжением — величиной, показывающей в виде процентов соотношение частоты вращения магнитного поля к частоте вращения ротора.
По причине того, что обмотка ротора представляет собой замкнутую цепь, в ней создается ток, создающий пусковой момент в направлении вращения магнитного поля статора. Это приводит к вращению ротора после превышения пусковым моментом его тормозного момента. Наблюдаемое в этот момент явление называется скольжением — величиной, показывающей в виде процентов соотношение частоты вращения магнитного поля к частоте вращения ротора.
(n1 – частота магнитного поля статора; n2 – частота вращения ротора)
Скольжение является очень важным параметром. На старте его величина всегда равна 1 и, естественно, становится меньше по мере увеличения разности между n1 и n2, что сопровождается также уменьшением электродвижущей силы и вращающего момента. Во время работы на холостом ходу скольжение минимально и растет по мере увеличения статического момента. Достигнув критического скольжения (обозначается как sкр), может спровоцировать опрокидывание двигателя. После уравновешивания тормозного и электромагнитного момента изменения величин прекращаются.
Таким образом, принцип действия асинхронного двигателя основывается на взаимодействии магнитного поля ротора, находящегося во вращении, и токов, наведенных в роторе этим же полем. При этом обязательным условием возникновения вращающего момента является разница частот вращения полей.
Однофазный асинхронный двигатель
Фактически, любой асинхронный электродвигатель является трехфазным и предусматривает подключение к трехфазной сети с напряжением 380 В. Однофазным или двухфазным его называют при подключении к однофазной электросети с напряжением 200 В, когда питание подается лишь на две обмотки. В такой схеме на основную рабочую обмотку подается чистая фаза от сети, а на другую питание идет через фазосдвигающий элемент, как правило, конденсатор. Такая схема позволяет создать необходимую индукцию для смещения ротора и запустить асинхронный двигатель от однофазной сети. Для дальнейшей его работы даже необязательно, чтобы пусковая обмотка (которую подключают через конденсатор) оставалась под напряжением.
Дело в том, что трехфазный асинхронный двигатель продолжает функционировать (под малой нагрузкой) даже если во время работы от него отключить подачу энергии по одному из питающих проводов, сымитировав таким образом работу от однофазной сети. Это обусловлено тем, что результирующее магнитное поле сохраняет вращение.
Двухфазный асинхронный двигатель
Создать вращающееся магнитное поле можно и при использовании двухфазных обмоток. Для обеспечения работоспособности схемы фазы обмоток необходимо расположить с 90˚ смещением друг от друга. При их питании токами, которые смещены по фазе на 90˚, возникает вращающееся магнитное поле, как и в трехфазной машине.
Асинхронный двухфазный электродвигатель приводится в движение за счет токов, образуемых при взаимодействии результирующего поля с роторными стержнями. Он ускоряется до того момента, пока не будет достигнута предельная скорость его вращения. Для питания такого двигателя от электросети однофазного тока необходимо создать сдвиг по фазе на одной из обмоток. Для этого применяются конденсаторы необходимой ёмкости.
Для этого применяются конденсаторы необходимой ёмкости.
На сегодняшний день все большее применение находят двухфазные асинхронных двигатели с полым алюминиевым ротором. Вращение ему придают вихревые токи, образованные внутри цилиндра, при взаимодействии с вращающимся магнитным полем.
Инерционный момент ротора наделяет двигатель хорошими характеристиками для использования в некоторых специализированных отраслях, как, например, системы, регулирующие работу мостовых и компенсационных схем. Одна из обмоток в них подключается к питающей сети через конденсатор, а через вторую проходит управляющее напряжение.
Схемы подключения
Для того чтобы подключить трехфазный асинхронный двигатель используют несколько различных схем, но чаще всего применяются «треугольник» и «звезда».
Треугольник
Преимущество данной схемы заключается в том, что при подключении согласно ей трехфазный двигатель может развивать наибольшую номинальную мощность. Для этого обмотки соединяются по принципу конец-начало, что на схематичном изображении похоже на треугольник, однако в виде треугольника понять что к чему, не всегда удобно. По этому предлагаем для анализа схему снизу, а затем фотографию уже в сборе (еще ниже).
По этому предлагаем для анализа схему снизу, а затем фотографию уже в сборе (еще ниже).
В трехфазных электрических сетях величина линейного напряжения между выводами обмоток составляет 380 В. При этом нет необходимости создания рабочего нуля. Важно отметить, что в такой схеме может возникнуть большой пусковой ток, значительно перегружающий проводку.
Звезда
Этот способ подключения является наиболее используемым в сетях с трехфазным током 380 В. Название схемы связано с тем, что концы обмоток соединяются в одной точке, словно звездные лучи. Начала обмоток подключаются посредством аппаратуры коммутации к фазным проводникам. В такой конструкции линейной напряжение между начал составляет 380 В, а между местом соединения и подключения проводника – 200 В. Ниже представлена схема, а еще ниже уже фотография в собранном виде.
Трехфазный двигатель для 380 В сетей, подключенный таким образом, не способен развить максимальную силу из-за того, что напряжение на каждой обмотке составляет 220 В. В свою очередь, такая схема предотвращает возникновение перегрузок по току, чем обеспечивается плавный пуск.
В свою очередь, такая схема предотвращает возникновение перегрузок по току, чем обеспечивается плавный пуск.
Возможность подключения двигателя тем или иным способом, как правило, указывается на его табличке. Значок Y означает «звезду», а ∆ — «треугольник». Определить схему на уже подключенной машине можно по виду обмоток – одна двойная перемычка между ними говорит, что использована «звезда» (первое фото снизу), а если между клеммами обмоток видно три перемычки – «треугольник» (первое фото сверху).
В случае, когда необходимо запустить трехфазный асинхронный электродвигатель в обратном направлении вращения, следует поменять два питающих провода от трехфазного источника местами.
Функциональные и эксплуатационные особенности
Характерные преимущества асинхронных двигателей:
Среди недостатков можно отметить:
Как производятся расчеты
Для того чтобы вычислить частоту вращения двигателя следует воспользоваться определенной нам ранее формулой скольжения:
И выразить из нее скорость вращения ротора:
В качестве примера возьмем двигатель модели АИР71А4У2 мощностью в 550 Вт с 4 парами полюсов и частотой вращения ротора 1360 об/мин.
При питании от сети с частотой 50 Гц статор будет вращаться со скоростью:
Таким образом, величина скольжения электродвигателя составляет:
И, наконец, прекрасное, хотя и устаревшее, видео рекомендуемое всем для одноразового просмотра.
Источник
Асинхронный электродвигатель: принцип работы и устройство
Самым эффективным устройством, превращающим электрическую энергию в механическую, является асинхронный двигатель, изобретенный инженером Доливо-Добровольским в конце 19 века. Учитывая возрастающий интерес современников к разработке и сборке станков, самодвижущихся аппаратов и прочих механизмов, мы постараемся объяснить, как работает асинхронный электродвигатель, чтобы вы могли понять принцип его действия и результативно его использовать.
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора.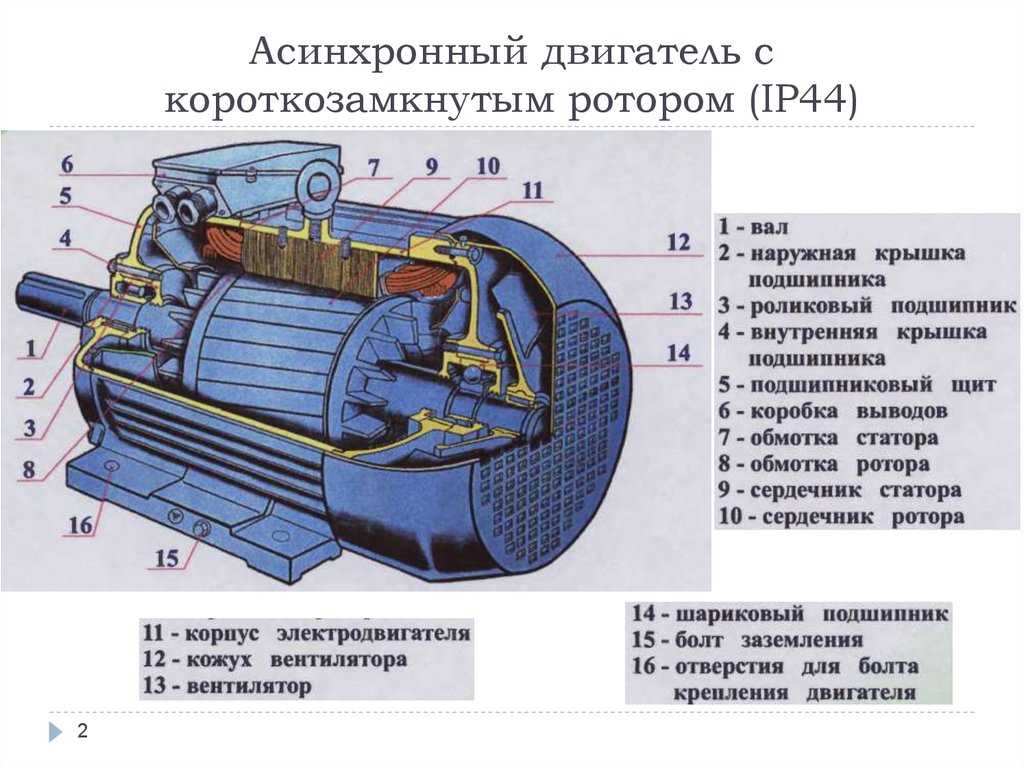 При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
Источник
Каков принцип действия трехфазного асинхронного двигателя кратко
Асинхронные машины относятся к классу электромеханических преобразователей, т.е. преобразователей электрической энергии в механическую или механической в электрическую. В первом случае они называются двигателями, а во втором – генераторами. Все электрические машины обладают свойством обратимости и могут осуществлять преобразование энергии в обоих направлениях, поэтому при изучении процессов в машинах пользуются понятиями двигательного и генераторного режимов. Однако при разработке и изготовлении машины оптимизируются для условий работы в одном из режимов и используются в соответствии с назначением. Асинхронные машины не являются исключением из этого правила, но асинхронные генераторы значительно уступают синхронным по многим параметрам и редко используются на практике, в то время как асинхронные двигатели являются самыми распространёнными электромеханическими преобразователями. Суммарная мощность асинхронных двигателей составляет более 90% общей мощности всех существующих двигателей, поэтому в данном курсе мы ограничимся рассмотрением только этого типа машин.
Однако при разработке и изготовлении машины оптимизируются для условий работы в одном из режимов и используются в соответствии с назначением. Асинхронные машины не являются исключением из этого правила, но асинхронные генераторы значительно уступают синхронным по многим параметрам и редко используются на практике, в то время как асинхронные двигатели являются самыми распространёнными электромеханическими преобразователями. Суммарная мощность асинхронных двигателей составляет более 90% общей мощности всех существующих двигателей, поэтому в данном курсе мы ограничимся рассмотрением только этого типа машин.
Асинхронные двигатели относятся к бесколлекторным машинам переменного тока или машинам с вращающимся магнитным полем. Название асинхронные (несинхронные) объясняется тем, что в статическом режиме работы скорость вращения ротора (вращающейся части) двигателя отличается от скорости вращения магнитного поля, т.е. ротор и поле вращаются несинхронно.
Причиной широкого распространения асинхронных двигателей является их предельная простота, надёжность и экономичность. Конструкция асинхронных двигателей не претерпела существенных изменений с 1889 года, когда эти двигатели были изобретены М.О. Доливо-Добровольским. Можно сказать, что асинхронные двигатели совместно с синхронными генераторами и трёхфазными линиями передачи и распределения электрической энергии образуют систему передачи механической энергии на расстояние.
Конструкция асинхронных двигателей не претерпела существенных изменений с 1889 года, когда эти двигатели были изобретены М.О. Доливо-Добровольским. Можно сказать, что асинхронные двигатели совместно с синхронными генераторами и трёхфазными линиями передачи и распределения электрической энергии образуют систему передачи механической энергии на расстояние.
В последнее время в связи с появлением полупроводниковых преобразователей частоты для питания асинхронных двигателей область их применения существенно расширилась. Они стали широко применяться в высокоточных приборных приводах там, где ранее использовались в основном двигатели постоянного тока.
Работа асинхронного двигателя основана на взаимодействии электрического тока, протекающего в обмотке ротора, с вращающимся магнитным полем, возбуждаемым обмотками статора. Статор (неподвижная часть машины) асинхронного двигателя состоит из корпуса, сердечника и обмоток. Корпус является конструктивным элементом машины и практически не участвует в электромагнитных процессах.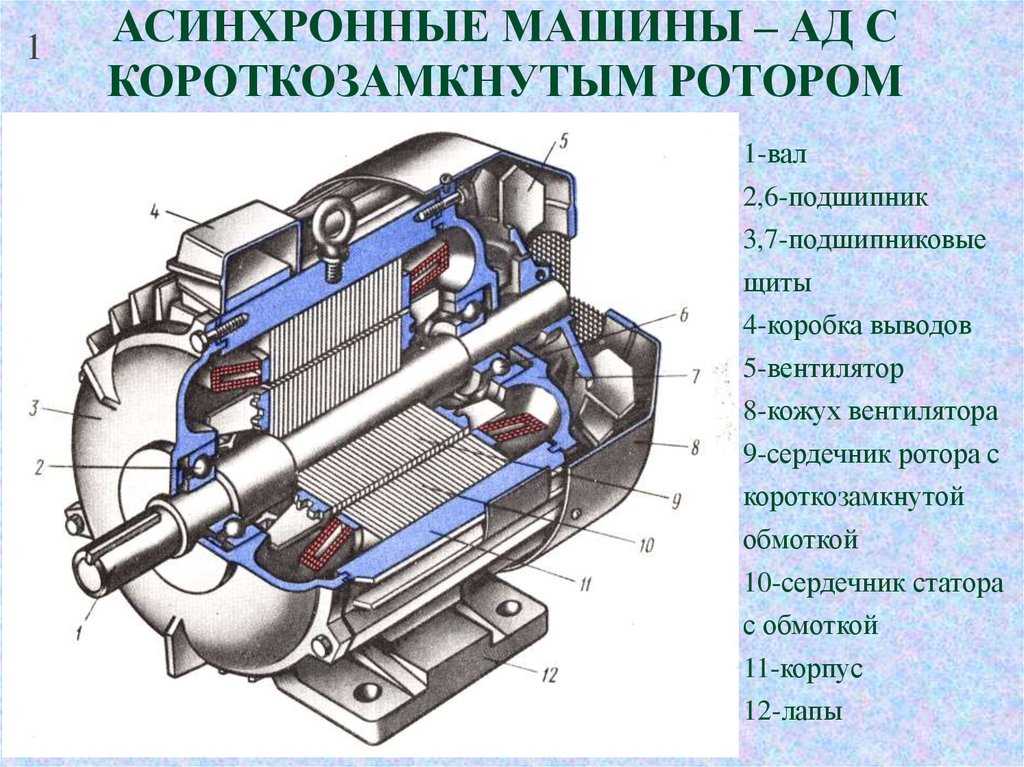 Сердечник статора изготавливается из листов электротехнической стали и представляет собой полый цилиндр, на внутренней поверхности которого имеются пазы для укладки обмоток. Конструктивная схема сердечника статора без обмоток и с сосредоточенными обмотками показана на рис. 1.
Сердечник статора изготавливается из листов электротехнической стали и представляет собой полый цилиндр, на внутренней поверхности которого имеются пазы для укладки обмоток. Конструктивная схема сердечника статора без обмоток и с сосредоточенными обмотками показана на рис. 1.
Рис. 1 Конструктивная схема статора асинхронного двигателя
Оси трёх фазных обмоток статора смещены в пространстве по окружности пакета на 120°, а пазы с концами обмоток (X, Y, Z) отстоят от пазов, в которые уложены их начала (A, B, C) на 180°.
При подключении обмоток к трёхфазному источнику питания, протекающие в них токи возбуждают магнитные поля, оси которых совпадают с осями обмоток, а максимальные значения индукции изменяются во времени по синусоидальным законам.
Поля отдельных обмоток суммируются в пространстве внутри сердечника и образуют единое магнитное поле статора. Картину этого поля схематично можно проследить по нескольким точкам на рис. 2.
Рис. 2 Получение вращающегося магнитного поля статора асинхронного двигателя
Обозначим положительное направление тока в обмотке знаком «+» в точке её начала и знаком «•» в точке конца. Тогда для состояния 1 в пазах сердечника A, Y и C будет одно направление тока в проводниках, а в пазах Z, B и X другое. Общая картина магнитного поля для текущего момента будет соответствовать двум магнитным потокам, охватывающим пазы с одинаковыми направлениями токов, поэтому ось поля для состояния «1» будет направлена под углом 30° к оси AX. Такими же построениями можно определить, что через 1/6 часть периода магнитное поле сместится на 60° в положительном направлении, а за один период частоты сети – на 360°.
Тогда для состояния 1 в пазах сердечника A, Y и C будет одно направление тока в проводниках, а в пазах Z, B и X другое. Общая картина магнитного поля для текущего момента будет соответствовать двум магнитным потокам, охватывающим пазы с одинаковыми направлениями токов, поэтому ось поля для состояния «1» будет направлена под углом 30° к оси AX. Такими же построениями можно определить, что через 1/6 часть периода магнитное поле сместится на 60° в положительном направлении, а за один период частоты сети – на 360°.
Магнитное поле вращается внутри пакета статора с угловой частотой
определяемой частотой источника питания статорных обмоток f1. Годограф вектора индукции представляет собой окружность, поэтому поле называется круговым.
Направление вращения поля определяется порядком чередования фаз. При переключении любой пары обмоток направление вращения поля меняется на противоположное.
Если вдвое увеличить число пазов сердечника и, разделив каждую обмотку на две части, поместить её в пазы так, чтобы начала и концы половин обмоток находились в пазах, смещённых по окружности статора на 90°, то при подключении к сети образуется магнитное поле с двойным числом полюсов (рис. 3).
Рис. 3 Магнитное поле статора асинхронного двигателя с двойным числом полюсов
За один период частоты питания оно будет перемещаться в пространстве на 180°, т.е. частота его вращения будет в два раза меньше. Проведя аналогичные построения картины магнитного поля для обмоток, разделённых на p частей, можно убедиться, что при этом будут возбуждаться поля с числом пар магнитных полюсов равным p и угловая частота вращения поля будет уменьшаться в p раз, т.е.
где ω1 = 2πf1 – частота питающей сети, а p – число пар полюсов магнитного поля.
Традиционно частоту вращения называют скоростью вращения и измеряют во внесистемных единицах – оборотах в минуту. Тогда выражение (1) можно представить в виде
где n1 – скорость вращения магнитного поля в об/мин, а f1 – частота питающей сети в герцах.
При частоте промышленной сети 50 Гц возникает ряд возможных скоростей вращения магнитного поля: 3000, 1500, 1000, 750, 600…об/мин.
Принцип действия асинхронного двигателя показан на рис. 4.
Рис. 4 Принцип действия асинхронного двигателя
На нём круговое вращающееся магнитное поле изображено в виде вращающихся полюсов постоянного магнита. Это представление является полной физической аналогией магнитного поля возбуждаемого обмотками статора и может использоваться всегда для наглядного отображения электромеханического взаимодействия.
Поместим в пространство между полюсами замкнутый проводник в виде прямоугольной рамки, подвешенной на оси OO′, вокруг которой вращается магнитное поле. Движение поля относительно рамки вызывает появление в ней ЭДС, а т.к. рамка замкнута, то под действием ЭДС в ней возникает электрический ток. Рамка с протекающим по ней током испытывает механическое воздействие со стороны магнитного поля, приводящее её во вращение. Воздействие магнитного поля на рамку в виде но только при наличии тока в рамке, который, в свою очередь, возникает в результате того, что магнитное поле движется относительно рамки. При равенстве скоростей вращения Ω1 = Ω, т.е. при синхронном вращении, поле будет неподвижно относительно рамки и не будет создавать вращающего момента, т.к. в рамке не будет индуцироваться ток.
Таким образом, устройство, показанное на рис. 4, работоспособно только при асинхронном движении поля и рамки и является простейшим асинхронным двигателем.
Вращающий момент в модели на рис. 4 можно увеличить, если вместо одной установить на оси несколько рамок. В результате образуется конструкция ротора асинхронного двигателя, состоящая из продольных стержней и замыкающих их по краям колец, называемая «беличья клетка» (рис. 5, а).
Рис. 5 Конструкция короткозамкнутого ротора асинхронного двигателя «беличья клетка»
Электромагнитная сила, создающая вращающий момент, пропорциональна величине магнитной индукции, зависящей, при прочих равных условиях, от магнитных сопротивлений цепи, по которой замыкается магнитный поток. Главной составляющей магнитного сопротивления на пути потока являются воздушные зазоры, поэтому их необходимо заполнить ферромагнетиком. Эту функцию выполняет сердечник ротора (рис. 5, б) Он, также как сердечник статора, изготавливается из листов электротехнической стали, собирается в пакет и напрессовывается на вал. В листах сердечника вырублены отверстия, образующие при сборке пакета продольные каналы, которые заполняются расплавленным алюминием или медью. В результате создаётся обмотка ротора типа «беличья клетка». Ротор такой конструкции называется короткозамкнутым (рис. 5, в) и используется в подавляющем большинстве асинхронных двигателей.
Электрическая энергия в цепь ротора передаётся посредством магнитного поля, поэтому ротор не имеет контактов для подключения к внешним электрическим цепям, что существенно повышает надёжность двигателя и позволяет использовать его в условиях, в которых не могут эксплуатироваться другие типы машин, например, во взрывоопасных помещениях. Скорость вращения короткозамкнутого ротора ограничивается только условиями механической прочности его конструкции и опор, поэтому асинхронные короткозамкнутые двигатели используются в приводах со скоростями вращения до 300000 об/мин.
Более сложную конструкцию имеет так называемый фазный ротор.
Рис. 6 Конструкция фазного ротора асинхронного двигателя
В пазы пакета сердечника этого ротора уложены три фазные об мотки статора (1, рис. 6). Они соединены звездой, а начала обмоток выведены через контактные кольца 2 и щётки 3 и подключены к регулировочным реостатам 4. Асинхронные двигатели с фазным ротором используются в основном в регулируемом приводе подъёмно-транспортных механизмов, но в последнее время их вытесняют из этой области двигатели с короткозамкнутым ротором с питанием от преобразователей частоты.
Источник
Каков принцип действия трехфазного асинхронного двигателя кратко
Асинхронный (индукционный) двигатель – механизм, превращающий силу переменного тока в механическую. Под асинхронным подразумевают, что скорость движения магнитной силы статора выше аналогичной величины оборотов ротора.
Для того, чтобы получше представлять, что такое асинхронный двигатель и принцип действия трехфазного асинхронного двигателя, где он используется и как работает, необходимо разобраться в его составных частях и деталях, исследовать технические характеристики. Кроме того, не лишним будет понять, как происходит преобразование силы во время пуска и где используется асинхронный двигатель на практике.
В сегодняшней статье мы попробуем ответить на самые интересные вопросы, связанные с асинхронными двигателями, разобраться в том, что такое устройство однофазного асинхронного двигателя, рассмотрим принципы работы, а также плюсы и минусы данного типа устройств.
Немного истории
Первый подобный механизм электродвигателей появился еще в 1888 году и представил его американский инженер Никола Тесла. Однако, его опытный образец устройства и был не самым удачным, так как был двух фазным или много фазным и рабочие характеристики асинхронного двигателя не удовлетворяли потребителей. Поэтому широкого распространения не получил.
А вот благодаря российскому ученому Михаилу Доливо-Доброволь скому в изобретение удалось вдохнуть новую жизнь. Именно ему принадлежит первенство в деле создания первого в мире трехфазного асинхронного мотора. Такое усовершенствование конструкции стало революционным, так как принцип работы трехфазного асинхронного двигателя позволял использовать для работы всего три провода, а не четыре. Так что для плавного пуска устройства в массовое производство препятствий больше не оставалось.
Сегодня, благодаря своей простоте эти машины получили широкое распространение, а механическая характеристика асинхронного двигателя устраивает всех водителей.
Простота в использовании, принцип действия асинхронного двигателя, легкий пуск, надежность и дешевизна, помогли этим моторам распространиться по всему миру и буквально совершить технический переворот в промышленности.
Принцип работы трехфазного двигателя основан на питании от трех фаз переменного тока в стандартной сети. Для работы ему требуется именно такое электричество и поэтому он назван трех фазным.
Устройство трехфазного двигателя
Любой мотор асинхронного типа, независимо от его мощности и размеров, состоит из одних и тех же частей, механическая характеристика асинхронного двигателя также одна и та же. Главными среди составляющих являются:
Помимо этого, в современных трех фазных двигателях можно найти следующие детали:
Как уже указывалось выше, базовые элементы двигателя — это статор (неподвижная часть) и ротор (подвижная деталь).
Статор выполнен в виде цилиндра, составлен данный элемент из множества металлических, форменных листов. Внутренняя часть создана таким образом, чтобы расположить обмотку. Центры обмоток расположены под углом в 120 градусов, а подключение происходит, исходя из доступного напряжения и двух возможных вариантов: на три или пять контактов.
Принципы, использование которых лежит в работе такого приспособления, как устройство асинхронного двигателя:
Исходя из типа обмотки, ротор может быть короткозамкнутым или фазным.
Короткозамкнутым называют ротор, состоящий из множества стальных частей. Работа асинхронного двигателя с короткозамкнутым ротором заключается в следующем: в специальные пазы заливают алюминий, формирующий сердцевины, крепящиеся с обеих сторон стопорными кольцами, такая конструкция получила название «беличья клетка». Называется так, потому что замкнута накоротко и в ней не может использоваться сопротивление.
Фазным называют ротор, который обмотан по принципу, аналогичному статору, подходящему для трехфазной сети. Края проводки сердцевины замыкают в звезду, а оставшиеся контакты подводят к контактным частям.
Согласно принципу обратимости, любым фазным асинхронным двигателям свойственна возможность работать в качестве двигателя, генератора или электромагнитного тормоза. Электромеханическая характеристика асинхронного двигателя:
Изменение порядка чередования фаз приводит к тому, что магнитное поле и сердцевина вращаются в различные стороны, при этом потребляется как механическая энергия, так и напряжение сети, создавая тормозной момент. Собранная энергия приводит к нагреву машины.
Принцип работы трехфазного двигателя
Принцип работы асинхронного двигателя в следующем: подавая напряжение на статор, в его проводке возникает магнитное воздействие, которая благодаря углу размещения осей обмоток, суммируется и создает итоговый, вращающий магнитный поток.
Вращаясь, он создает в проводниках электродвижущую силу. Обмотка сердцевины, создана таким образом, что при включении в сеть, появляется сила, налаживающаяся на действие статора и создающая движение.
Устройство и принцип действия асинхронного двигателя зависит и от сердцевины. Движение сердцевины происходит, когда магнитная сила статора и пусковой момент преодолевают тормозную мощность ротора и внутренняя часть начинает движение, в этот момент проявляется такой показатель, как скольжение.
Скольжение очень важный параметр. В начале движения ротора оно равно 1, но вместе с ростом частоты движения, наблюдается выравнивание, и как следствие снижаются электродвижущие силы и ток в обмотках, это приводит к снижению вращающего момента.
Существует крайний предел скольжения, превышать это значение не стоит, ведь механизм может «опрокинуться», что приведет к нарушению его нормальной работы. Минимальное скольжение происходит на холостых оборотах мотора, при увеличении момента значение будет расти, до наступления критической отметки.
Во время пуска вектор результирующего магнитного поля неподвижной части плавно вращается с определенной частотой. Через сечение ротора проходит магнитный поток. Электроэнергия, подходящая к двигателю в момент пуска, уходит на перемагничивание статора и ротора.
Стоит заметить, что для электромоторов, в том числе асинхронных свойственно то, что во время пуска в короткий промежуток времени достигается до 150% крутящего момента. Пусковой ток превышает номинальный в 7 раз и из-за этого, в момент пуска падает напряжение во всей электрической сети. Если падение напряжения слишком большое, то даже сам двигатель может не запуститься – таков принцип его действия. Поэтому на практике используют устройство плавного пуска.
Устройство плавного пуска
Устройства плавного пуска асинхронных двигателей имеет свою специфику. Оно используется для плавного пуска или остановки электромагнитных двигателей. Может быть механическим, электромеханичес ким или полностью электронным.
Пусковая характеристика асинхронного двигателя предназначена:
Принцип работы и действия устройства плавного пуска основаны на широкой вариативности переменных. Как следствие, появляются большие возможности для управления режимами работы.
Хорошие и плохие свойства асинхронных моторов
Асинхронный двигатель принцип работы и устройство имеет достоинства и недостатки. Трансформаторы, внутри которых находится вращающийся ротор, используемый для работы двигателя, получили обширное применение так как принцип действия у них простой и понятный, а само устройство работает бесперебойно. Однако и короткозамкнутым и фазным устройствам свойственны определенные недостатки. Причем именно принцип их действия лежит в основе данных минусов.
Стоит отметить, что в настоящее время, отдается предпочтение устройствам с короткозамкнутым ротором. А вот устройства, в которых ротор фазный используются в редких случаях, как правило, когда достигается большая мощность.
Источник
Видео
Принцип работы асинхронного электродвигателя
Трехфазный асинхронный двигатель что это.
Устройство асинхронного электродвигателя
Синхронный и асинхронный двигатели. Отличия двигателей
Этому не учат, а стоило бы. Чем отличается звезда от треугольника? #звезда #треугольник #двигатель
АСИНХРОННЫЙ двигатель, принцип работы и строение, простыми словами. (ТРЕХФАЗНЫЙ).
Трехфазные асинхронные двигатели
Трехфазные асинхронные двигатели, устройство и принцип работы
КОНСТРУКЦИЯ И ПРИНЦИП РАБОТЫ АСИНХРОННОГО ДВИГАТЕЛЯ
Работа трехфазного асинхронного двигателя от однофазной сети
Назначение и принцип действия асинхронного двигателя
- Подробности
- Категория: Электрические машины
- электродвигатель
Назначение асинхронного электродвигателя
Система трехфазного переменного тока, позволившая создать устройства для получения вращающегося магнитного потока, вызвала появление наиболее распространенного в данное время электродвигателя, называемого асинхронным. Это название обусловлено тем, что вращающаяся часть машины — ротор — всегда вращается со скоростью, не равной скорости магнитного потока, т. е. не синхронно с ним. Изготовляемый на мощности от долей ватта до тысяч киловатт при напряжениях 127, 220, 380, 500, 600, 3000, 6000, 10000 В, этот электродвигатель прост по конструкции, надежен в эксплуатации и дешев по сравнению с другими типами. Он применяется во всех видах работ, где не требуется поддержания постоянной скорости вращения, а также в быту, в однофазном исполнении для малой мощности.
Принцип действия асинхронного двигателя
Рассмотрим устройство, показанное на рис. Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая
Модель асинхронного двигателя
Обозначим:
п, — частота вращения магнита (синхронная частота), об/мин;
п2 — частота вращения диска, об/мин; п — разность частот вращения магнита и диска, об/мин.
Частота вращения диска меньше частоты вращения магнита, и, следовательно, диск вращается с несинхронной (асинхронной) частотой. Разница частот магнита и диска представляет собой частоту, с которой м.с.л. пересекают витки диска. Отношение разницы частот к синхронной частоте называется скольжением. Скольжение может быть выражено в долях единицы или в процентах:
В двигателях вращающееся магнитное поле создается трехфазным током, протекающим по обмотке статора, а роль диска выполняет обмотка ротора. Активная сталь статора и ротора служит магнитопроводом, уменьшающим в сотни раз сопротивление магнитному потоку.
Под влиянием подведенного к статору напряжения сети Ul в его обмотке протекает ток I,. Этот ток создает вращающийся магнитный поток Ф, замыкающийся через статор и ротор. Поток создает в обеих обмотках э.д.с. Е{ и Е2, как в первичной и вторичной обмотках трансформатора. Таким образом, асинхронный двигатель подобен трехфазному трансформатору, в котором э. д.с. создаются вращающимся магнитным потоком.
Рис. 2 . Работа асинхронного двигателя при cos ф2 = 1
Пусть поток вращается в направлении движения стрелки часов. Под влиянием э.д.с. Е2 в обмотке ротора пойдет ток I2, направление которого показано на рис. 2. Предположим, что он совпадает по фазе с Е2. Взаимодействие тока I2 и потока Ф создает электромагнитные силы F, приводящие ротор во вращение, вслед за вращающимся потоком. Таким образов, асинхронный двигатель представляет собой трансформатор с вращающейся вторичной обмоткой и способный поэтому превращать электрическую мощность E2I2 cos ф в механическую.
Ротор всегда отстает от вращающегося магнитного потока, так как только в этом случае может возникать э.д.с. Е2, а следовательно, ток 12 и силы F. Чтобы изменить направление вращения ротора, следует изменить направление вращения потока. Для этого меняют местами два любых провода, подводящие ток от сети к статору. В этом случае меняется порядок следования фаз ABC на АСВ или ВАС, и поток вращается в обратную сторону.
Ротор двигателя вращается с асинхронной частотой п2, поэтому и двигатель называется асинхронным. Частоту вращения магнитного потока называют синхронной частотой п1. Частота вращенияротора
Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска п2 — 0; а если вообразить, что ротор вращается синхронно с потоком, п2 = пх.
Чем больше нагрузка на валу, тем меньше скорость ротора п2 и следовательно больше S, так как больший тормозной момент должен уравновеситься вращающим моментом; последнее возможно только при увеличении Е2 и I2, а значит и S. Скольжение при номинальной нагрузке SH у асинхронных двигателей равно от 1 до 7%; меньшая цифра относится к мощным двигателям.
- Назад
- Вперёд
- Вы здесь:
- Главная
- Эл. машины
- Ремонт электродвигателей А4 и АН32
Еще по теме:
- Испытания по определению электрических величин электрических машин
- Основные повреждения электродвигателей
- Двигатели типа ДАБ
- Методы сушки электрических машин
- Автоматизация испытаний электрических машин
Асинхронный трехфазный двигатель принцип работы и устройство
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
- Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
- А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Асинхронный двигатель — принцип работы устройства, схема частотного преобразователя
Современное промышленное производство, как постоянно динамично развивающаяся система, требует применения для решения различных задач новых и инновационных технических решений. Вместе с тем, многие производства и сейчас используют в качестве двигателей станков, машин и различных механизмов старых надежных асинхронных двигателей.
- Среди применяемых в производстве электронных систем и электрических машин, особое место занимает асинхронный двигатель – электрическая с электронным блоком управления машина, использующая переменный ток для преобразования электрической энергии в механическую.
- Более глубокое раскрытие этого понятия основано на принципе использования магнитного поля для создания вращательного движения – статор создает магнитное поле, несколько большее по частоте, чем частота магнитного поля вращающегося ротора.
- Магнитное поле заставляет вращаться ротор, при этом, его частота вращения несколько меньше, чем изменение магнитного поля статора, он как бы пытается догнать образовываемое статором поле.
- Двигатели такого принципа являются наиболее распространенными видами электрических машин – это наиболее простой и экономичный тип преобразования электрической энергии переменного тока во вращательную механическую энергию.
- Как и у большинства технически сложных механизмов, у таких моторов есть масса положительных сторон, главная из которых является отсутствие электрического контакта между подвижными и неподвижными частями машины.
- Это достоинство асинхронников и является основным при выборе моделей двигателей в конструкторских разработках – отсутствие коллектора и щеток, контакта между статором и ротором значительно повышают надежность и удешевляют производство таких моторов.
- Однако, следует заметить, что это правило справедливо только к одному из видов (хотя и наиболее распространенному виду) – двигателям с короткозамкнутым ротором.
Описание схемы
Работу асинхронного электродвигателя, предназначенного для обычной электросети переменного электрического тока можно описать следующей схемой:
- На обмотки статора двигателя подается переменный электрический ток от каждой фазы (в случае, если двигатель трехфазный, если ток однофазный, то включение остальных обмоток происходит посредством включения в схему пусковых конденсаторов, играющих роль имитации трехфазной сети).
- В результате подачи напряжения, в каждой из имеющихся обмоток создается электрическое поле с частотой напряжения, и поскольку они имеют смещение на 120 градусов относительно друг друга, то происходит смещение подачи как во времени (даже ничтожно малого), так и в пространстве (тоже достаточно небольшого).
- Получившийся в результате вращающийся магнитный поток статора своей силой создает в роторе, вернее в его проводниках, электродвижущую силу.
- Созданный в статоре магнитный поток, взаимодействуя с магнитным полем ротора, создает пусковой момент – магнитное поле которого стремится повернуться в направлении магнитного поля статора.
- Магнитное поле постепенно нарастая и превышая так называемый тормозной момент, проворачивает ротор.
Таким образом, схемой работы асинхронного агрегата, является взаимодействие магнитного поля статора и токов, которые образуются этим самым магнитным полем в роторе двигателя.
Устройство
Устройство двигателя
Наиболее наглядно представить конструкцию агрегата можно на примере асинхронного двигателя, имеющего короткозамкнутый ротор, второй вид электромоторов имеет несколько иную конструкцию, это вызвано тем, что они используют промышленную сеть в 380 Вольт.
Основными составными частями такой электрической машины являются статор и ротор, которые не соприкасаются между собой и имеют воздушный зазор. Такая конструкция основных частей связана с тем, что в состав обеих основных частей электромотора входят так называемые активные части – состоящие из металлического проводника обмотка возбуждения.
Для каждой части имеются своя соответственно статорная и роторная обмотки и стальной сердечник – магнитопровод. Это основные части электродвигателя, принципиально необходимые для работы машины, все остальные части – корпус, подшипники качения, вал, вентилятор – это конструктивно необходимые, но абсолютно не влияющие на принцип работы прибора.
Они во многом играют важную роль, например, подшипники качения, обеспечивают возможность плавности хода, корпус защищает от механического воздействия на основные рабочие части, вентилятор обеспечивает обдув двигателя и отвод тепла, выделяемого при работе, но на принцип преобразования электрической энергии в механическую не влияют.
Итак, основными частями асинхронного электромотора, как электрической машины являются:
- Статор – основной элемент электромотора, состоящая из трехфазной (или многофазной) обмотки. Особенностью обмотки является определенный порядок расположения витков – проводники равномерно расположены в пазах, имеющих угол 120 градусов по всей окружности.
- Ротор – второй основной элемент агрегата, представляющий собой цилиндрический сердечник с залитыми алюминием пазами. Такая конструкция из-за своей особенности называется «беличья клетка» или короткозамкнутым типом ротора. В ней медные стержни замкнуты на концах кольцом с обеих сторон цилиндра.
Кроме самого простейшего вида асинхронного электромотора с простым ротором, к семейству асинхронных двигателей относятся и машины, которые имеют более сложную конструкцию, обмотки, у которых имеются как у статора, так и ротора.
Трехфазные обмотки, а конструктивно их по одной на каждую фазу, соединяются подобно обмоткам статора или «звездой» или «треугольником», и концы обмоток этих выводятся на контактные кольца, которые вращаются на валу, электрический ток на них передается через щетки из графита. Этот тип электродвигателей имеет большую мощность и применяется уже в промышленных машинах и станках.
Область применения
В виду особенности конструкции и простоты изготовления, подобные электромоторы нашли основное применение в машинах и механизмах в которых не требуется большое усилие и мощность при работе.
В основном, такие моторы устанавливаются практически на всех бытовых приборах:
- мясорубки;
- фены;
- электрические миксеры;
- бытовые вентиляторы;
- небольшие маломощные бытовые станки;
Трехфазные асинхронные моторы имеют различную мощность, от 150 Вт до нескольких киловатт, и применяются в основном в промышленности в качестве моторов для машин и механизмов.
Применение подобного типа моторов обусловлено приемлемым с точки зрения соотношения мощность/производительность, к тому же, как и их простейшие собраться такие двигатели не требуют большого внимания и кропотливого обслуживания, в особенности те типы корпуса, которые специально разработаны для работы в тяжелых условиях производства.
Виды
В виду различных конструкторских задач, стоящих перед разрабатываемыми машинами и механизмами в промышленном, серийном производстве, нашли свое применение асинхронные линейные электромоторы основных четырех видов:
Моторы для однофазной сети
С короткозамкнутым ротором.
Двигатели для двухфазной сети
С короткозамкнутым ротором.
Трехфазные асинхронные двигатели
С короткозамкнутым ротором.
Трехфазные двигатели
С фазным ротором.
Особенностью конструкции является заложенный принцип работы однофазного асинхронного двигателя – у него только одна обмотка статора рабочая. А вот для пуска используется дополнительная обмотка, ее назначение – подключение к сети посредством конденсатора. Такое подключение используется для создания начального сдвига фаз и пускового момента, проще говоря, для того, чтобы вал начал вращаться.
Второй тип электрических моторов – двухфазные двигатели, имеют две рабочие обмотки. Такое техническое решение позволяет наиболее эффективно работать от однофазной сети, используя фазосдвигающий конденсатор для получения вращающегося магнитного поля.
Трехфазные асинхронники, имеют в своем составе по одной обмотке на каждую фазу подаваемого напряжения – три рабочие обмотки с соответствующим сдвигом относительно друг друга на 120 градусов. Это позволяет при включении в трехфазную сеть, получить электрическое поле, приводящее в движение короткозамкнутый ротор.
Для четвертого трехфазного асинхронника с фазным ротором, статор устроен таким же образом – три обмотки с соединением по типу звезда.
Ротор, в отличие от беличьих колес, имеет уже полноценную обмотку с выводами на щетки. Подключение обмотки, которого производится как напрямую, так и через реостаты. Такие машины имеют наибольший пусковой момент и наибольшую развиваемую мощность.
Принцип работы частотных преобразователей
- Вместе со всеми положительными качествами асинхронных двигателей, существует и неприятные моменты – слишком большой пусковой ток и невозможность регулировать скорость вращения ротора.
- Решить эти проблемы можно, используя частотные преобразователи.
- Принцип работы такого устройства в двух словах можно описать следующим образом: с помощью электронной схемы выпрямителя, сетевое напряжение сначала сглаживается, а после, фильтруется с помощью конденсаторов.
- Использование таких частотных преобразователей при пуске, позволяет избежать обратного вращения вала двигателя, и существенно сократить (до 50%) потребляемую энергию.
Асинхронный двигатель: принцип работы и устройство :
Из всего спектра выпускаемых в настоящее время электрических моторов наибольшее распространение получил двигатель асинхронный трёхфазный. Практически половина производимой в мире электроэнергии используется именно этими машинами.
Они широко применяются в металлообрабатывающей и деревообрабатывающей промышленности. Асинхронный двигатель незаменим на фабриках и насосных станциях.
Без таких машин не обойтись и в быту, где они используются и в другой домашней технике, и в ручном электроинструменте.
Область применения этих электрических машин расширяется с каждым днём, так как совершенствуются и сами модели, и используемые для их изготовления материалы.
Каковы же основные части этой машины
Разобрав двигатель асинхронный трехфазный, можно наблюдать два главных элемента.
1. Статор.
2. Ротор.
Одна из важнейших деталей — статор.На фото сверху эта часть двигателя расположена слева. Он состоит из следующих основных элементов:
1. Корпус. Он необходим для соединения всех деталей машины. Если двигатель небольшой, то корпус изготавливают цельнолитым. В качестве материала используют чугун. Применяются также сталь или сплавы алюминия. Иногда корпус малых двигателей совмещает функции сердечника. Если же двигатель имеет большие размеры и мощность, то корпус сваривают из отдельных частей.
2. Сердечник. Этот элемент двигателя запрессовывается в корпус. Служит он для улучшения качеств магнитной индукции. Выполняется сердечник из пластин электрической стали. Для того чтобы снизить потери, неизбежные при появлении вихревых токов, каждая пластина покрывается слоем специального лака.
3. Обмотка. Она размещается в пазах сердечника. Состоит из витков медной проволоки, которые собираются в секции. Соединённые в определённой последовательности, они образуют три катушки, которые в совокупности являются обмоткой статора. Подключается она непосредственно к сети, поэтому называется первичной.
Ротор — это подвижная часть двигателя.На фото он находится справа. Служит он для преобразования силы магнитных полей в механическую энергию. Состоит ротор асинхронного двигателя из следующих деталей:
1. Вал. На хвостовиках его закреплены подшипники. Они запрессовываются в щиты, крепящиеся болтами к торцовым стенкам коробки статора.
2. Сердечник, который собирается на валу. Состоит из пластин специальной стали, обладающей таким ценным свойством, как низкое сопротивление магнитным полям.
Сердечник, обладая формой цилиндра, и является основой для укладки обмотки якоря.
Роторная, или, как её ещё называют, вторичная обмотка получает энергию благодаря магнитному полю, которое появилось вокруг катушек статора при прохождении по ним электрического тока.
Двигатели по типу изготовления подвижной части
Различают двигатели:
1. Имеющие короткозамкнутую обмотку ротора. Один из вариантов исполнения этой детали показан на рисунке.
Асинхронный двигатель с короткозамкнутым ротором имеет обмотку, сделанную из алюминиевых стержней, которые располагаются в пазах сердечника. В торцевой части они замкнуты кольцами накоротко.
2. Электродвигатели, имеющие ротор, изготовленный с контактными кольцами.
У обоих типов асинхронных двигателей конструкция статора одинаковая. Различаются они только исполнением якоря.
Каков же принцип работы
Якорь трёхфазного асинхронного двигателя, исполненный подобным образом, приводится во вращение благодаря эффекту возникновения переменного магнитного поля в статорных катушках.
Чтобы понять, каким образом это происходит, необходимо вспомнить физический закон самоиндукции. Он гласит, что вокруг проводника, по которому проходит поток заряженных частиц, возникает магнитное поле.
Величина его будет прямо пропорциональна индуктивности провода и интенсивности протекающего в нём потока заряженных частиц. Кроме того, это магнитное поле формирует силу с определённой направленностью.
Именно она нас и интересует, так как является причиной вращения ротора. Для эффективной работы двигателя необходимо иметь мощный магнитный поток. Создаётся он благодаря специальному способу монтажа первичной обмотки.
Известно, что источник питания имеет переменное напряжение. Следовательно, магнитное поле вокруг статора будет иметь такую же характеристику, напрямую зависящую от изменения тока в подающей сети. Примечательно то, что каждая фаза смещена одна относительно другой на 120˚.
Что происходит в обмотке статора
Каждая фаза сети питания подключается к соответствующей катушке статора, поэтому возникающее вокруг них магнитное поле будет смещено на 120˚. Источник питания имеет переменное напряжение, следовательно, вокруг катушек статора, которыми располагает асинхронный двигатель, будет возникать переменное магнитное поле. Схема асинхронного двигателя собирается так, чтобы магнитное поле, возникающее вокруг катушек статора, постепенно изменялось и последовательно переходило от одной обмотки к другой. Таким образом создаётся эффект вращающегося магнитного поля. Можно вычислить его частоту вращения. Измеряться она будет в оборотах за минуту. Определяется по формуле: n=60f/p, где f — это частота переменного тока в подключенной сети (Гц), p — соответствует числу пар полюсов, смонтированных на статоре.
Как работает ротор
Теперь необходимо рассмотреть, какие процессы возникают во вторичной обмотке. Асинхронный двигатель с короткозамкнутым ротором имеет конструкционную особенность. Дело в том, что к его якорной обмотке напряжение не подводится. Оно там возникает благодаря магнитоиндукционной связи с первичной обмоткой.
Поэтому и происходит процесс, обратный тому, что наблюдался в статоре, в соответствии с законом, который гласит, что при пересечении проводника, а в нашем случае это короткозамкнутая обмотка ротора, магнитным потоком в нём возникает электрический ток.
Откуда берётся магнитное поле? Оно возникло вокруг первичной катушки при подключении трёхфазного источника питания.
Соединим статор и ротор. Что получится?
Таким образом, имеем асинхронный короткозамкнутый двигатель с ротором, в обмотке которого проходит электрический ток. Он и будет причиной возникновения магнитного поля вокруг якорной обмотки. Однако полярность этого потока будет отличаться от созданного статором.
Соответственно, и сила, образуемая им, будет вступать в противодействие с той, которая вызвана магнитным полем первичной обмотки. Это и приведёт в движение ротор, так как на нём собрана вторичная катушка, и хвостовики вала якоря закреплены в корпусе двигателя на подшипниках.
Рассмотрим ситуацию взаимодействия сил, возникающих от магнитных полей статора и ротора, с течением времени. Знаем, что магнитное поле первичной обмотки вращается и обладает определённой частотой. Созданная им сила будет перемещаться, имея аналогичную скорость. Это заставит асинхронный двигатель заработать. И его ротор будет свободно вращаться вокруг оси.
Эффект скольжения
Ситуация, когда силовые потоки ротора как бы отталкиваются от вращающегося магнитного поля статора, получила название скольжения. Следует отметить, что частота асинхронного двигателя (n1) всегда меньше той, с которой перемещается магнитное поле статора. Объяснить это можно так.
Чтобы в роторной обмотке возник ток, она должна быть пересечена магнитным потоком с определённой угловой скоростью. И поэтому справедливо утверждение, что скорость вращения вала больше либо равна нулю, но меньше интенсивности перемещения магнитного поля статора. Ротор имеет частоту вращения, зависящую от силы трения в подшипниках, а также от величины отбора мощности с вала ротора.
Поэтому он как бы отстаёт от магнитного поля статора. Именно из-за этого частота называется асинхронной.
Таким образом, электроэнергия питающего источника преобразовалась в кинетическую энергию вращающегося вала. Скорость его вращения прямо пропорциональна частоте тока питающей сети и количеству пар полюсов статора. Для увеличения частоты вращения якоря можно использовать частотные преобразователи. Однако работа этих устройств должна быть согласована с количеством пар полюсов.
Как подключить двигатель к источнику питания
Чтобы осуществить пуск асинхронного двигателя, его необходимо подключить к сети трёхфазного тока. Схема асинхронного двигателя собирается двумя способами. На рисунке показана схема соединения выводов двигателя, в которой статорные обмотки собраны способом «звезда».
На этом рисунке изображён другой способ соединения, именуемый «треугольник». Собираются схемы в клеммной коробке, закреплённой на корпусе.
Следует знать, что начала каждой из трёх катушек, их ещё называют обмотками фаз, именуются С1, С2, С3 соответственно. Аналогично подписываются концы, которые имеют названия С4, С5, С6. Если в клеммной коробке нет маркировки выводов, то начала и концы придётся определить самостоятельно.
Как сделать реверс
При возникновении потребности осуществить пуск асинхронного двигателя, изменив направление вращения якоря, надо просто поменять местами два провода подключаемого источника трехфазного напряжения.
Однофазный асинхронных двигателей
В быту проблематично использовать трёхфазные двигатели из-за отсутствия требуемого источника напряжения. Поэтому существует однофазный асинхронный двигатель. Он также имеет статор, но с существенным конструкционным отличием. Оно заключается в количестве и способе расположения обмоток. Это определяет и схему запуска машины.
Если однофазный асинхронный двигатель имеет статор с двумя обмотками, то расположены они будут со смещением по окружности под углом в 90˚. Катушки называются пусковой и рабочей.
Соединяются они параллельно, но, чтобы создать условия для появления вращающееся магнитного поля, дополнительно вводится активное сопротивление или конденсатор.
Это создаёт сдвиг фаз токов обмоток, близкий к 90˚, благодаря чему создаётся условие для образования вращающегося магнитного поля.
Если статор имеет только одну катушку, то подключённый к ней однофазный источник питания будет причиной пульсирующего магнитного поля. В замкнутой накоротко обмотке ротора появится переменный ток.
Он станет причиной возникновения своего магнитного потока. Результирующая двух образовавшихся сил будет равна нулю.
Создать его можно, подключив конденсаторную схему пуска.
Подключить двигатель к однофазной цепи
Изготовленный для работы от трёхфазного источника питания электромотор может работать и от домашней однофазной сети, но при этом существенно снизятся его характеристики, такие как КПД, коэффициент мощности. Кроме того, снизятся мощность и пусковые показатели.
Если же без подключения не обойтись, то требуется из трёх обмоток статора собрать схему, где их будет только две. Одна рабочая, а другая пусковая. Например, есть три катушки с началами С1, С2, С3 и концами С4, С5, С6 соответственно.
Для создания первой (рабочей) обмотки двигателя объединяем концы С5 и С6, а их начала С3 и С2 подключаем к источнику однофазного тока, например, бытовой сети 220 вольт. Роль второй, пусковой обмотки, будет выполнять оставшаяся незадействованная катушка стартера.
Она подключается к источнику питания через конденсатор, соединённый с ней последовательно.
Параметры асинхронного двигателя
При подборе таких машин, а также при дальнейшей их эксплуатации необходимо учитывать характеристики асинхронного двигателя. Они бывают энергетические — это коэффициент полезного действия, коэффициент мощности. Важно учитывать и механические показатели.
Основным из них считается зависимость между скоростью вращения вала и рабочим усилием, прикладываемым к нему. Существуют ещё пусковые характеристики. Они определяют пусковой, минимальный и максимальный моменты и их соотношение. Важно также знать, каков пусковой ток асинхронного двигателя.
Для наиболее эффективного использования двигателя необходимо учитывать все эти параметры.
Нельзя оставить без внимания вопрос энергосбережения. В последнее время он рассматривается не только с позиции уменьшения эксплуатационных затрат. Экономичность электродвигателей снижает уровень экологических проблем, связанных с производством электроэнергии.
Перед производителями постоянно ставятся задачи разработки и выпуска энергосберегающих двигателей, повышения эксплуатационного ресурса, уменьшения шумового уровня.
Улучшить энергосберегающие показатели можно путём снижения потерь при эксплуатации. А они напрямую зависят от рабочей температуры машины. Кроме того, совершенствование этой характеристики неизбежно приведёт к увеличению срока эксплуатации двигателя.
Снизить температуру обмоток можно, применяя вентилятор наружного обдува, закреплённый на хвостовике вала ротора. Но это приводит к неизбежному повышению шума, производимого двигателем при работе. Особенно ощутим этот показатель при высокой скорости вращения ротора.
Таким образом, видно, что асинхронный двигатель имеет один существенный недостаток. Он не способен поддерживать постоянную частоту вращения вала при возрастающих нагрузках. Зато такой двигатель имеет множество преимуществ по сравнению с образцами электродвигателей других конструкций.
Во-первых, он имеет надёжную конструкцию. Работа асинхронного двигателя не вызывает никаких сложностей при его использовании.
Во-вторых, асинхронный двигатель экономичен в производстве и эксплуатации.
В-третьих, эта машина универсальна. Имеется возможность её использования в любых устройствах, которые не требуют точного поддержания частоты вращения вала якоря.
В-четвёртых, двигатель с асинхронным принципом действия востребован и в быту, получая питание только от одной фазы.
Электродвигатель асинхронный трехфазный — устройство и принцип работы | Режимщик
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижной части статора и вращающейся части ротора. Эти части имеют сердечник и обмотку.
Ввиду того, что обмотка статора включается в сеть, она является первичной, обмотка ротора — вторичной. Энергия в обмотку ротора поступает из обмотки статора за счет магнитной связи.
Конструктивно асинхронные двигатели делятся на два вида:
— двигатели с короткозамкнутым ротором;
— двигатели с фазным ротором.
Устройство трехфазного асинхронного двигателя с короткозамкнутым ротором.
Рисунок 1. Устройство трехфазного асинхронного двигателя с короткозамкнутым ротором: 1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов; 5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкнутой обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Статор состоит из корпуса 11 и сердечника 10 с трехфазной обмоткой.
Корпус двигателя изготавливается методом отлива из алюминиевого сплава или из чугуна. Двигатель изображенный на рисунке 1 имеет закрытое обдуваемое исполнение. Это можно определить по наличию на корпусе ряда продольных ребер, основным назначением которых является увеличение поверхности охлаждения двигателя.
В корпусе двигателя располагается сердечник статора 10. Он выполнен отштампованными листами из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрытых слоем изоляционного лака. Листы собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета.
Данная конструкция сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем.
На внутренней поверхности сердечника статора в продольных пазах расположены пазовые части обмотки статора соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам.
Ротор состоит из вала 1 и сердечника 9 с короткозамкнутой обмоткой.
Короткозамкнутая обмотка называется «беличье колесо».
Беличья клетка представляет собой ряд металлических стержней (выполненных из алюминия или меди). Она располагаются в пазах сердечника ротора и замкнуты с двух сторон короткозамыкающими кольцами.
Рисунок 2. Короткозамкнутый ротор: а — обмотка «беличья клетка», б — ротор с обмоткой, выполненной методом литья под давлением; 1 — вал; 2 — короткозамыкающие кольца; 3 — вентиляционные лопатки.
Сердечник ротора имеет шихтованную конструкцию.
Короткозамкнутая обмотка ротора выполняется заливкой собранного сердечника ротора алюминиевым сплавом. Совместно со стержнями обмотки отливаются короткозамыкающие кольца и вентиляционные лопатки (рисунок 2).
Вращение вала ротора осуществляется в подшипниках качения 2 и 6. Подшипники качения располагаются в подшипниковых щитах 3 и 7.
Охлаждение двигателя выполняется методом обдува поверхности корпуса. Поток воздуха нагнетается центробежным вентилятором 5, закрытого кожухом 8.
На обратной стороне кожуха располагаются отверстия для забора воздуха.
Концы обмоток фаз выводят на зажимы коробки выводов 4.
Рисунок 3. Расположение выводов об¬мотки статора (а) и положение перемычек при соединении обмотки статора звездой и треугольником (б)
Асинхронные двигатели предназначены для работы в трехфазной сети и могут работать на двух разных напряжениях, отличающиеся в √3 раз.
Выводы обмоток фаз в коробке выводов располагают таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания.
Крепление двигателя к поверхности осуществляется посредством лап 12
В качестве защиты персонала от поражения электрическим током на двигателях предусмотрены болты заземления (как правило, менее двух).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с короткозамкнутым ротором показана на рисунке 4.
Рисунок 4. Принципиальные схемы включения трехфазных асинхронных двигателей с
короткозамкнутым (а) и фазным (б) ротором
Трехфазный асинхронный двигатель с фазным ротором.
Рисунок 5. Устройство трехфазного асинхронного двигателя с фазным ротором: 1, 7 — подшипники, 2,6 — подшипниковые щиты, 3 — корпус, 4 — сердечник статора с обмоткой, 5 — сердечник ротора, 8 — вал, 9 — коробка выводов, 10 — лапы, 11 — контактные кольца.
Статор этого двигателя также состоит из корпуса 3 и сердечника 4 с трехфазной обмоткой. Подшипниковые щиты 2 и 6 с подшипниками качения 1 и 7. Лапы для крепления 10. Коробка выводов 9.
Ротор асинхронного двигателя с фазным ротором имеет более сложную конструкцию. На валу 8 закреплен шихтованный сердечник 5 с трехфазной обмоткой, выполненной аналогично об¬мотке статора. Обмотку ротора соединяют звездой и ее выводы при¬соединяются к контактным кольцам 11, расположенным на валу.
Контактные кольца изолированным друг от друга и от вала. Для осуществления электрического контакта с обмоткой вращающегося ротора на каждое контактное кольцо 1 накладывают щетки 2, располагаемых в щеткодержателях 3. Каждый щеткодержатель снабжен пружинами, обеспечивающими прижатие щеток к контактному кольцу с определенным усилием.
Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но они обладают лучшими регулировочными и пусковыми свойствами, чем двигатели с короткозамкнутым ротором. Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке 4 б.
Обмотка ротора асинхронного двигателя с фазным ротором соединена с пусковым реостатом ПР, который создает в цепи ротора добавочное сопротивление Rдоб.
Трехфазные электрические двигатели. Коэффициент мощности в зависимости от индуктивной нагрузки
Коэффициент мощности системы электроснабжения переменного тока определяется как отношение активной (истинной или фактической) мощности к полной мощности , где
- Активная (Реальная или истинная) Мощность измеряется в ваттах ( Вт ) и представляет собой мощность, потребляемую электрическим сопротивлением системы, выполняющей полезную работу
- Полная мощность измеряется в вольт-амперах (ВА) и представляет собой произведение напряжения в системе переменного тока на весь протекающий в ней ток. Это векторная сумма активной и реактивной мощности
- Реактивная мощность измеряется в реактивных вольт-амперах ( ВАР ). Реактивная мощность — это мощность, накапливаемая и отводимая асинхронными двигателями, трансформаторами и соленоидами.
- Активная, реактивная и полная мощность
Реактивная мощность требуется для намагничивания электродвигателя, но не выполняет никакой работы. Реактивная мощность, требуемая индуктивными нагрузками, увеличивает количество полной мощности и требуемую подачу в сеть от поставщика электроэнергии к системе распределения.
Увеличение реактивной и полной мощности приведет к уменьшению коэффициента мощности — PF .
Коэффициент мощности
Коэффициент мощности обычно определяют — PF — как косинус фазового угла между напряжением и током — или « cosφ «:
PF = cos φ
7
7 где
PF = коэффициент мощности
φ = фазовый угол между напряжением и током
Коэффициент мощности, определенный IEEE и IEC, представляет собой отношение между приложенной активной (действительной) мощностью — и полной мощностью , и в общем случае может быть выражен как:
PF = P / S (1)
, где
PF = Фактор мощности
P = Активный (True или Real Power (Watts)
S = Appet Power).
Низкий коэффициент мощности является результатом индуктивных нагрузок, таких как трансформаторы и электродвигатели. В отличие от резистивных нагрузок, создающих тепло за счет потребления киловатт, индуктивные нагрузки требуют протекания тока для создания магнитных полей для выполнения желаемой работы.
Коэффициент мощности является важным показателем в электрических системах переменного тока, поскольку
- общий коэффициент мощности менее 1 указывает на то, что поставщику электроэнергии необходимо обеспечить большую генерирующую мощность, чем фактически требуется
- искажение формы волны тока, которое способствует снижению коэффициента мощности, вызвано искажением формы волны напряжения и перегревом нейтральных кабелей трехфазных систем. путем введения ограничений на амплитуду гармоник тока.
Пример — коэффициент мощности
Промышленное предприятие потребляет 200 А при 400 В , трансформатор питания и резервный ИБП имеют номинал 400 В x 200 А = 80 кВА .
Если коэффициент мощности — PF — из нагрузок — 0,7 — только
80 KVA × 0,7
= 56 кВт
из реальной энергии потребляется по системе. Если коэффициент мощности близок к 1 (чисто резистивная цепь), система питания с трансформаторами, кабелями, распределительным устройством и ИБП может быть значительно меньше.
- Любой коэффициент мощности менее 1 означает, что проводка цепи должна пропускать больший ток, чем это было бы необходимо при нулевом реактивном сопротивлении в цепи, чтобы доставить такое же количество (истинной) мощности на резистивную нагрузку.
Conductor Cross-Section vs. Power Factor
Required cross-section area of conductor with lower power factor:
Power Factor 1 0.9 0.8 0.7 0.6 0,5 0. 40.3 Cross-Section 1 1.2 1.6 2.04 2.8 4.0 6.3 11.1 A low power factor is expensive и неэффективны, и некоторые коммунальные предприятия могут взимать дополнительную плату, если коэффициент мощности меньше 0,95 . Низкий коэффициент мощности снизит пропускную способность электрической системы, увеличивая ток и вызывая падение напряжения.
«Опережающий» или «отстающий» коэффициент мощности
Коэффициент мощности обычно указывается как «опережающий» или «отстающий», чтобы показать знак фазового угла.
- При чисто резистивной нагрузке ток и напряжение меняют полярность ступенчато, и коэффициент мощности будет равен 1 . Электрическая энергия течет в одном направлении по сети в каждом цикле.
- Индуктивные нагрузки — трансформаторы, двигатели и обмотки — потребляют реактивную мощность, при этом форма волны тока отстает от напряжения.
- Емкостные нагрузки — батареи конденсаторов или подземные кабели — генерируют реактивную мощность, причем фаза тока опережает напряжение.
Индуктивные и емкостные нагрузки накапливают энергию в магнитных или электрических полях в устройствах во время частей циклов переменного тока. Энергия возвращается обратно в источник питания в течение остальных циклов.
В системах с главным образом индуктивной нагрузкой – как правило, на промышленных предприятиях с большим количеством электродвигателей – запаздывающее напряжение компенсируется батареями конденсаторов.
Коэффициент мощности для трехфазного двигателя
Полная мощность, требуемая индуктивным устройством, таким как двигатель или аналогичный, состоит из нерабочая мощность, вызванная током намагничивания, необходимая для работы устройства (измеряется в киловарах, кВАр)
Коэффициент мощности трехфазного электродвигателя можно выразить как:
PF = P / [(3) 1/2 U I] (2)
, где
PF = Фактор мощности
PF = POWE
U = напряжение (V)
I = ток (A, Amps)
— или альтернатива:
P = (3) 1,102 248 248 248 248 248 2 488 248 248 248 248 248 2 488 248 248 248 2 488 248 248 248 2 488 248 248 2 488 248 2 488 248 248 2 488 248 2 488 248 2 488 248 248 2 488 9. .
= (3) 1/2 U I cos φ (2b)
U, l и cos φ обычно указываются на паспортной табличке двигателя.
Типичные коэффициенты мощности мощности
| Power (HP) | Скорость (RPM) | Фактор мощности (COS φ ) | . 1/2 загрузки | 3/4 загрузки | полная загрузка | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 — 5 | 1800 | 0.15 — 0.20 | 0.5 — 0.6 | 0.72 | 0.82 | 0.84 | |||||||
| 5 — 20 | 1800 | 0.15 — 0.20 | 0.5 — 0.6 | 0.74 | 0.84 | 0.86 | |||||||
| 20 — 100 | 1800 | 0.15 — 0.20 | 0.5 — 0.6 | 0.79 | 0.86 | 0.89 | |||||||
| 100 — 300 | 1800 | 0. 15 — 0.20 | 0.5 — 0.6 | 0.81 | 0.88 | 0.91 | |||||||
- 1 hp = 745.7 W
Power Factor by Industry
Typical un -improved power factors:
| Industry | Power Factor |
|---|---|
| Brewery | 75 — 80 |
| Cement | 75 — 80 |
| Chemical | 65 — 75 |
| Electro-chemical | 65 — 75 |
| Foundry | 75 — 80 |
| Forging | 70 — 80 |
| Hospital | 75 — 80 |
| Производство, машины | 60 — 65 |
| Производство, покраска | 65 — 70 |
| Металлообработка4 901 | |
| Mine, coal | 65 — 80 |
| Office | 80 — 90 |
| Oil pumping | 40 — 60 |
| Plastic production | 75 — 80 |
| Stamping | 60 — 70 |
| Металлургический завод | 65 — 80 |
| Текстиль | 35 — 60 |
9040 Факторы Силы0043
- снижение счетов за электроэнергию — предотвращение штрафа за низкий коэффициент мощности со стороны энергоснабжающей компании
- увеличение мощности системы — дополнительные нагрузки могут быть добавлены без перегрузки системы
- улучшенные рабочие характеристики системы за счет снижения потерь в линии — благодаря меньшему току
- улучшение рабочие характеристики системы за счет усиления напряжения – предотвращение чрезмерного падения напряжения
Коррекция коэффициента мощности с помощью конденсатора
| Capacitor correction factor | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Power factor before improvement (cosΦ) | Power factor after improvement (cosΦ) | ||||||||||
| 1. 0 | 0.99 | 0.98 | 0.97 | 0.96 | 0.95 | 0.94 | 0.93 | 0.92 | 0.91 | 0.90 | |
| 0.50 | 1.73 | 1.59 | 1.53 | 1.48 | 1.44 | 1.40 | 1.37 | 1.34 | 1.30 | 1.28 | 1.25 |
| 0.55 | 1.52 | 1.38 | 1.32 | 1.28 | 1.23 | 1.19 | 1.16 | 1.12 | 1.09 | 1.06 | 1.04 |
| 0.60 | 1.33 | 1.19 | 1.13 | 1.08 | 1.04 | 1.01 | 0.97 | 0.94 | 0.91 | 0.88 | 0.85 |
| 0.65 | 1.17 | 1.03 | 0.97 | 0.92 | 0.88 | 0. 84 | 0.81 | 0.77 | 0.74 | 0.71 | 0.69 |
| 0.70 | 1.02 | 0.88 | 0.81 | 0.77 | 0.73 | 0.69 | 0.66 | 0.62 | 0.59 | 0.56 | 0.54 |
| 0.75 | 0.88 | 0.74 | 0.67 | 0.63 | 0.58 | 0.55 | 0.52 | 0.49 | 0.45 | 0.43 | 0.40 |
| 0.80 | 0.75 | 0.61 | 0.54 | 0.50 | 0.46 | 0.42 | 0.39 | 0.35 | 0.32 | 0.29 | 0.27 |
| 0.85 | 0.62 | 0.48 | 0.42 | 0.37 | 0.33 | 0.29 | 0.26 | 0.22 | 0.19 | 0.16 | 0. 14 |
| 0.90 | 0.48 | 0.34 | 0.28 | 0.23 | 0.19 | 0.16 | 0.12 | 0.09 | 0.06 | 0.02 | |
| 0.91 | 0.45 | 0.31 | 0.25 | 0.21 | 0.16 | 0.13 | 0.09 | 0.06 | 0.02 | ||
| 0.92 | 0.43 | 0.28 | 0.22 | 0.18 | 0.13 | 0.10 | 0.06 | 0.03 | |||
| 0.93 | 0.40 | 0.25 | 0.19 | 0.15 | 0.10 | 0.07 | 0.03 | ||||
| 0.94 | 0.36 | 0.22 | 0.16 | 0.11 | 0.07 | 0.04 | |||||
| 0. 95 | 0.33 | 0.18 | 0.12 | 0.08 | 0.04 | ||||||
| 0.96 | 0.29 | 0.15 | 0.09 | 0.04 | |||||||
| 0.97 | 0.25 | 0.11 | 0.05 | ||||||||
| 0,98 | 0,20 | 0,06 | |||||||||
| 0.99 | 0.14 | ||||||||||
Example — Improving power factor with capacitor
An electrical motor with power 150 kW has power factor before improvement cosΦ = 0,75 .
Для требуемого коэффициента мощности после улучшения cosΦ = 0,96 — поправочный коэффициент конденсатора 0,58 .
Требуемая мощность квар может быть рассчитана как
C = (150 кВт) 0,58
= 87 квар коррекция асинхронных двигателей примерно до 95% коэффициента мощности.
| Мощность асинхронного двигателя (л.с.) | Номинальная скорость двигателя (об/мин) | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3600 | 1800 | 1200 | |||||||||||||||
| Оценка конденсаторов (KVAR) | Снижение тока линии (%) | RATING 18 (%) | RATING 8 (%) | RATIN | Capacitor Rating (KVAR) | Reduction of Line Current (%) | |||||||||||
| 3 | 1.5 | 14 | 1.5 | 23 | 2.5 | 28 | |||||||||||
| 5 | 2 | 14 | 2. 5 | 22 | 3 | 26 | |||||||||||
| 7.5 | 2.5 | 14 | 3 | 20 | 4 | 21 | |||||||||||
| 10 | 4 | 14 | 4 | 18 | 5 | 210164 | 5 | 210164 | 5 | 210164 | 5 | 210164 | .0164 | 5 | 18 | 6 | 20 |
| 20 | 6 | 12 | 6 | 17 | 7.5 | 19 | |||||||||||
| 25 | 7.5 | 12 | 7.5 | 17 | 8 | 19 | |||||||||||
| 30 | 8 | 11 | 8 | 16 | 10 | 19 | |||||||||||
| 40 | 12 | 12 | 13 | 15 | 16 | 19 | |||||||||||
| 50 | 15 | 12 | 18 | 15 | 20 | 19 | |||||||||||
| 60 | 18 | 12 | 21 | 14 | 22. 5 | 17 | |||||||||||
| 75 | 20 | 12 | 23 | 14 | 25 | 15 | |||||||||||
| 100 | 22.5 | 11 | 30 | 14 | 30 | 12 | |||||||||||
| 125 | 25 | 10 | 36 | 12 | 35 | 12 | |||||||||||
| 150 | 30 | 10 | 42 | 12 | 40 | 12 | |||||||||||
| 200 | 35 | 10 | 50 | 11 | 50 | 10 | |||||||||||
| 250 | 40 | 11 | 60 | 10 | 62.5 | 10 | |||||||||||
| 300 | 45 | 11 | 68 | 10 | 75 | 12 | |||||||||||
| 350 | 50 | 12 | 75 | 8 | 90 | 12 | |||||||||||
| 400 | 75 | 10 | 80 | 8 | 100 | 12 | |||||||||||
| 450 | 80 | 8 | 90 | 8 | 120 | 10 | |||||||||||
| 500 | 100 | 8 | 120 | 9 | 150 | 12 | |||||||||||
Анализ производительности трехфазного асинхронного двигателя с прямым переменным током и ЧРП – IJERT
Том 09, выпуск 08 (август 2020 г.
)
DOI: 10.17577/IJERTV9IS080057
Скачать полнотекстовый PDF
Процитировать эту публикацию
Шагуфта, С. Н. Джоши, 2020, Анализ производительности трехфазного асинхронного двигателя с прямым переменным током и ЧРП, МЕЖДУНАРОДНЫЙ ЖУРНАЛ ИНЖЕНЕРНЫХ ИССЛЕДОВАНИЙ И ТЕХНОЛОГИЙ (IJERT), том 09, выпуск 08 (август 2020 г.),
Версия PDF
Посмотреть
Только текстовая версия
Анализ производительности трехфазного асинхронного двигателя с AC Direct и ЧРП
Шагуфта
Технический специалист, энергосистема, правительство. Женский инженерный колледж,
Аджмер, Индия.
С.Н. Джоши
Ассистент-профессор, Департамент EE Govt. Женский инженерный колледж,
Аджмер, Индия
Резюме Эта статья включает в себя анализ производительности трехфазного асинхронного двигателя с трехфазным переменным током прямого и частотно-регулируемого привода (ЧРП).
Сравнение было проведено по различным параметрам. Для анализа используется MATLAB-SIMULINKTM.Ключевые слова Инвертор с широтно-импульсной модуляцией, диодный выпрямитель, трехфазный асинхронный двигатель.
ВВЕДЕНИЕ
VFD — частотно-регулируемый привод. ЧРП используется для управления скоростью электрического асинхронного двигателя. Асинхронные двигатели — это двигатели с фиксированной скоростью, которые используются в большинстве отраслей промышленности из-за их низкой стоимости, надежности и прочности. Скорость асинхронного двигателя можно изменить различными способами, такими как смена полюсов, изменение напряжения, подключение сопротивления в цепи ротора и т. д., но наиболее эффективным методом является изменение частоты и напряжения питания двигателя. Скорость прямо пропорциональна частоте питания. Преобразователь частоты (ЧРП) изменяет частоту и, следовательно, изменяет скорость или крутящий момент асинхронного двигателя в соответствии с требованиями нагрузки.
Поскольку частотно-регулируемый привод обеспечивает энергоэффективную работу, плавное управление скоростью и крутящим моментом, а также приводит к возникновению гармоник в системе. Гармоники генерируются из-за использования силовых электронных коммутационных устройств. Эти гармоники влияют на работу асинхронного двигателя. В этой статье описывается влияние гармоник на характеристики двигателя, а также способы улучшения характеристик асинхронного двигателя с помощью соответствующего LC-фильтра с помощью MATLAB/Simulink. В этой статье подробно рассматриваются характеристики двигателя в различных случаях, демонстрирующих характеристики асинхронного двигателя. Во-первых, мы изучаем параметры, когда трехфазный асинхронный двигатель напрямую питается от трехфазного источника переменного тока. Затем эти параметры сравниваются с параметрами, которые получаются при питании того же трехфазного асинхронного двигателя от ЧРП без фильтра. Затем производительность улучшается за счет введения в систему пассивных LC-фильтров.ПРОЦЕДУРА ДЛЯ ЧАСТОТНО-РЕГУЛИРУЕМОГО АИНХОННОГО ДВИГАТЕЛЯ
Привод с двигателем переменного тока с переменной частотой
Традиционный частотно-регулируемый привод (известный как вольт на герц (В/Гц) изменяет частоту и напряжение двигателя с помощью полупроводниковых блоков управления.
Транзисторные приводы асинхронных двигателей переменной частоты
Современной стратегией управления выходом переменного тока таких силовых электронных преобразователей является метод, известный как широтно-импульсная модуляция (ШИМ), который изменяет рабочий цикл переключателей преобразователя на высокой частоте переключения для достижения целевой средней низкой частоты. выходное напряжение или ток. В принципе, все схемы модуляции нацелены на создание последовательности коммутируемых импульсов, которые имеют такое же среднее значение основной частоты в вольт-секундах, что и целевая опорная форма волны в любой момент времени. Основная трудность с этими последовательностями коммутируемых импульсов заключается в том, что они также содержат нежелательные гармонические составляющие, которые следует свести к минимуму.
Существует три основных метода ШИМ. Эти альтернативы:
Переключение на пересечении целевого опорного сигнала и высокочастотной треугольной несущей (ШИМ с двойной кромкой и естественной дискретизацией синусоидально-треугольной формы).
Переключение на пересечении регулярно дискретизируемого опорного сигнала и высокочастотной треугольной несущей (шим-импульс с двойной фронтальной регулярной дискретизацией синусоидально-треугольной формы)).
Регулятор частоты асинхронного двигателя
Этот метод используется для управления скоростью асинхронного двигателя. Синхронной скоростью и, следовательно, скоростью двигателя можно управлять, изменяя частоту питания. Синхронная скорость асинхронного двигателя определяется соотношением, показанным ниже.
Синхронная скорость,
III ТРЕХФАЗНЫЙ АИНХРОННЫЙ ДВИГАТЕЛЬ
Трехфазный асинхронный двигатель широко используется в любых отраслях промышленности, таких как автомобильная, цементная, удобрительная, химическая, производство пряжи и т. д., из-за его простой и прочной конструкции. Трехфазный асинхронный двигатель представляет собой машину с однократным возбуждением. Асинхронный двигатель работает по закону электромагнитной индукции Фарадея. В этой статье поведение асинхронного двигателя изучается при подаче на него частотно-регулируемого привода или без него с использованием MATLAB/Simulink.
Рис. 1 Принципиальная схема асинхронной машины
ПРЕОБРАЗОВАТЕЛЬ AC-DC-AC
Этот преобразователь представляет собой комбинацию мостового выпрямителя, LC-фильтра и инвертора DC-AC PWM IGBT. Источник напряжения 60 Гц питает нагрузку 50 Гц, 50 кВт через преобразователь переменного тока в постоянный. Напряжение 600 В, 60 Гц, полученное на вторичной обмотке трансформатора звезда/треугольник, сначала выпрямляется шестиимпульсным диодным мостом.
Отфильтрованное постоянное напряжение подается на двухуровневый инвертор IGBT, генерирующий 50 Гц. Широтно-импульсная модуляция (ШИМ) в инверторе IGBT на несущей частоте 2 кГц. Время расчета 4 мкс Описано в схеме.Рис. 2 Преобразователь переменного тока в постоянный
ТРЕХФАЗНЫЙ ВЫПРЯМИТЕЛЬ
Используются двухполупериодные мостовые выпрямители с кремниевыми переходными диодами или тиристорами. Из-за тяжелых условий эксплуатации на электростанции и необходимости максимальной надежности и срока службы.
Рис. 3 Трехфазный двухполупериодный выпрямитель с нагрузкой R
Рис. 4 Форма выходного напряжения трехфазного выпрямителя
ШИМ БТИЗ ИНВЕРТОР
Преобразователи постоянного тока в переменный, более известные как инверторы, в зависимости от типа источника питания и соответствующей топологии силовой цепи классифицируются как инверторы с источником напряжения (VSI) и инверторы с источником тока (CSI).
Рис.
5 Классификация трехфазного инвертораИнверторы мощности
— это основные электронные схемы, которые используются для преобразования постоянного тока в переменный. Вход инвертора может быть от выпрямленного входа переменного тока или источника постоянного тока. Категории, с которыми мы можем дать переключение на инвертор, — это метод прямоугольной волны и метод широтно-импульсной модуляции.
Рис. 6 Выходные сигналы трехфазного инвертора
Рис. 7 Дискретный IGBT
Основными преимуществами ШИМ-преобразователя является значение нагрузки, ШИМ-преобразователь корректирует выходное напряжение за счет изменения ширины частоты переключения генераторов. Основным недостатком данного инвертора является то, что гармонические напряжения пятой, седьмой и других нечетных кратных основной частоты искажают выходное напряжение.
Рис. 8 Дискретный ШИМ-генератор
Блок PWM Generator генерирует импульсы для преобразователей широтно-импульсной модуляции (PWM) на основе несущей, использующих двухуровневую топологию.
Блок можно использовать для запуска устройств с принудительной коммутацией (FET, GTO или IGBT) однофазных, двухфазных, трехфазных, двухуровневых мостов или комбинации двух трехфазных мостов.ЖК-ФИЛЬТР
Последовательность импульсов ШИМ содержит полезную базовую частоту и набор высокочастотных гармоник, которые не требуются для обычных целей управления и все вместе создают электрические помехи. Электрические помехи всегда нежелательны по соображениям электромагнитной совместимости. Более того, некоторые высокочастотные гармоники ШИМ вредны для электрических машин, в основном из-за двух явлений: отражения в длинном кабеле и довольно низкого высокочастотного импеданса электрической машины по ее фазам через подшипники к земля.
Рис. 9 Пассивный фильтр LC
МОДЕЛИРОВАНИЕ И РЕЗУЛЬТАТЫ
В этой модели схемы моделирования Трехфазный асинхронный двигатель, питаемый от системы ЧРП. Система привода с переменной частотой, состоящая из инвертора PWM.
Источник напряжения 50 Гц питает асинхронный двигатель мощностью 5 л.с. через преобразователь переменного тока в постоянный. Напряжение 600 В, 50 Гц, полученное на вторичной обмотке трансформатора звезда/треугольник, сначала выпрямляется шестиимпульсным диодным мостом. Отфильтрованное постоянное напряжение подается на двухуровневый инвертор IGBT, генерирующий 50 Гц. Инвертор IGBT использует широтно-импульсную модуляцию (ШИМ) с несущей частотой 2 кГц. Схема дискретизируется с шагом расчета 2 мкс.Рис. 10 Схема имитации трехфазного асинхронного двигателя при питании от ЧРП с фильтром
Рис. 11 THD в осциллограмме напряжения
Рис. 12 THD тока, когда асинхронный двигатель питается от частотно-регулируемого привода с фильтром
ЗАКЛЮЧЕНИЕ
Асинхронный двигатель работает очень эффективно, когда он работает с источником постоянного трехфазного переменного напряжения. Но дело в том, что нам нужно контролировать скорость IM. В этом случае VFD используется для управления скоростью. Но ЧРП состоит из переключающих устройств силовой электроники, поэтому он вводит пиковый ток ротора, колебания крутящего момента, что приводит к дополнительному нагреву, потерям мощности, что влияет на стабильность мощности АД. Для улучшения формы волны тока ротора после преобразователя VFD подключается соответствующий LC-фильтр. После LC-фильтра ток ротора АД улучшается. Колебания крутящего момента затухают, а форма выходного сигнала преобразователя VFD становится более синусоидальной.
ССЫЛКИ
Харша. П. Павар, Неха С. Чаван, Управление скоростью асинхронного двигателя с использованием метода ШИМ IJERT, Том-4, выпуск 04, апрель 2015 г.
Тида Вин, Нанг Сабай и Хнин Нандар Маунг, Всемирная академия наук, инженерии и технологий 42 2008
М. Дипа, Проект привода ЧРП для трехфазного асинхронного двигателя
ИДЖИРСЕТ Том. 4, выпуск 1, январь 2015 г.
Энемуох Ф.
О., Окафор Э.Э., Онуэгбу Дж.К., АгуВ.Н. Моделирование Моделирование и анализ производительности привода с переменной частотой при управлении скоростью асинхронного двигателя IJEI, том 3, выпуск 5, декабрь 13, стр. 36-41В.В. Алексеев, А.П. Емельянов, А.Е. Козярук. Анализ динамических характеристик частотно-регулируемого асинхронного электропривода с использованием различных управляющих структур и алгоритмов. ISSN 1068-3712, Электротехника России, 2016, Том 87,
№4, ПП: 181-188
Б. Озпинечи, Л. М. Толберт, Реализация Simulink модели асинхронной машины Модульный подход, IEEE, стр. 728-734, 2003.
Навид Рахаман, Х.В. Моделирование и моделирование трехфазного тягового асинхронного двигателя Говиндраю с использованием Matlab Simulink, IJEECS, ISSN: 2347-2820, июнь 2014 г.
Jigar N. Mistry1, Hetal D. Solanki2, Tejas M. Vala3, Международный междисциплинарный исследовательский журнал VARIABLE FREQUENCY DRIVE Research Expo.
Крупа Ганди, К.Л.Мокария, Дипа Карват Моделирование ШИМ-преобразователя для частотно-регулируемого привода с использованием MATLAB, Международный журнал инженерных исследований и разработок e-ISSN: 2278-067X, p-ISSN: 2278-800X, www.ijerd.com, том 10, Выпуск 4 (апрель 2014 г.), стр.94-103
Yogita Y. Garud1, Sayali R. Gole2, Rutuja T. Jadhav3, Seema U. Deoghare4 Исследование частотно-регулируемого привода и его приложений Инновационные исследования в области науки, техники и технологий (организация, сертифицированная по стандарту ISO 3297: 2007), Vol. 5, выпуск 3, март 2016 г. Авторское право IJIRSET DOI:10.15680/IJIRSET.2016.0503056 3079
Трехфазные, двухфазные и однофазные двигатели — как они устроены, для чего используются
Трехфазные, двухфазные и однофазные двигатели – как они устроены, для чего используются
2021-05-21
- Трехфазный асинхронный двигатель с короткозамкнутым ротором
- Трехфазный асинхронный двигатель с фазным ротором
- Однофазный двигатель
- Как запустить однофазный двигатель?
- Двухфазный двигатель
Основная идея однофазных и трехфазных электродвигателей довольно проста. Они преобразуют электрическую энергию в механическую за счет вращения вала. Это возможно благодаря использованию магнитного поля. Очевидно, что в зависимости от приложения для запуска вращения необходимо использовать другое решение.
Асинхронные трехфазные двигатели с короткозамкнутым ротором или фазным ротором наиболее распространены в промышленности. Это в основном связано с их простой конструкцией, простотой в эксплуатации и способностью достигать гораздо более высокой выходной мощности, чем однофазные двигатели . Они используются в компрессорах, токарных, фрезерных станках и многих других устройствах.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель с короткозамкнутым ротором состоит из ротора и статора с зубьями и пазами. Обмотки размещены в пазах. В случае ротора это алюминиевые или медные стержни, соединяющие два кольца вместе. Таким образом, они образуют форму клетки. Стержни, из которых построена клетка, установлены наклонно, что обеспечивает равномерное вращение. Асинхронные двигатели также называют асинхронными двигателями. Это связано с тем, что фактическая скорость двигателя всегда меньше его синхронной скорости.
Трехфазные двигатели в предложении TME
Основными недостатками асинхронных асинхронных двигателей с короткозамкнутым ротором являются высокий пусковой ток и низкий пусковой момент. Асинхронные двигатели потребляют ток, в пять-восемь раз превышающий номинальный ток. Это вызывает нагрев обмоток, что является негативным явлением. Кроме того, такое высокое потребление тока может вызвать колебания напряжения в сети. По этой причине двигатели мощностью более 4 кВт нельзя даже напрямую подключать к сети. Поэтому можно использовать несколько методов запуска.
Одним из них является использование пускателя звезда-треугольник. Это означает, что при пуске в течение определенного периода момент ниже, а напряжение на каждой обмотке равно фазному напряжению. Когда двигатель набирает скорость, переключатель звезда-треугольник меняет соединения обмоток, так что начало одной обмотки соединяется с концом другой, нейтральный провод не используется, и двигатель работает на номинальной мощности.
Второй способ безопасного запуска асинхронного двигателя с короткозамкнутым ротором — использование устройства «мягкого пуска». Представляет собой электронную схему с использованием тиристоров и симисторов, предназначенную для плавного повышения напряжения, подаваемого на обмотки. В современных двигателях это решение предпочтительнее классического пускателя по схеме звезда-треугольник.
Трехфазный асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором является вторым по популярности типом трехфазного двигателя. Его конструкция более сложная, что выливается в более высокие затраты, связанные с приобретением и эксплуатацией данного типа мотора. При этом три обмотки соединяются в звезду, т. е. одинаковые концы обмоток (обычно обозначаемые буквами U, V, W) соединяются в общую точку. Остальные три конца (К, L, М) соединены с контактными кольцами со щетками. Концы этих обмоток выведены наружу, что позволяет подключить к обмоткам дополнительные цепи, обеспечивающие, например, плавный пуск.
Асинхронные двигатели с фазным ротором можно запускать с помощью дополнительных резисторов на стороне ротора. Они позволяют нам уменьшить ток ротора и, следовательно, уменьшить потребляемый ток. Это решение используется все реже и реже из-за высокой стоимости и сложности конструкции.
Другим решением является использование инвертора. Это решение тоже недешевое, но оно открывает большие возможности. Это позволяет точно контролировать скорость вращения двигателя. Инверторы также используются с асинхронными двигателями с короткозамкнутым ротором, а это означает, что более дорогие двигатели с фазным ротором становятся менее распространенными.
Для запуска двигателя необходимо создать вращающееся магнитное поле. Трехфазный двигатель создает вращающееся магнитное поле. Это возможно из-за фазового сдвига на 120 градусов. Иначе обстоит дело с однофазными двигателями. Вам нужно сгенерировать фазовый сдвиг для запуска.
Однофазный двигатель
Однофазные двигатели редко используются в промышленности, но обычно используются в домашнем хозяйстве, например, в бытовых приборах или электроинструментах. Это связано с тем, что большинству этих устройств не требуется слишком много энергии, и они должны быть просты в использовании. Поэтому они должны работать при подключении к обычной электрической розетке, без необходимости иметь трехфазное электроснабжение. Однофазные двигатели обычно обеспечивают мощность примерно до 2 кВт, что достаточно для большинства бытовых приборов.
Однофазные двигатели в наличии в TME
Как запустить однофазный двигатель?
Однофазный двигатель по конструкции аналогичен трехфазному двигателю . Однако, поскольку он имеет только одну обмотку, при подаче напряжения не создается вращающееся магнитное поле, и поэтому ротор не движется. Однако, если вы переместите вал двигателя, он будет вращаться сам по себе. С другой стороны, перемещение вала вручную небезопасно и не удобно. Следовательно, для запуска используется конденсатор и дополнительная обмотка, так называемая пусковая обмотка. Она чаще всего смещена на 90 градусов от основной обмотки. Пусковая обмотка используется только для запуска двигателя. Когда двигатель достигает своей номинальной скорости, его необходимо отключить. В противном случае он перегреется и сгорит.
Двухфазный двигатель
Очень редким типом электродвигателя является двухфазный асинхронный двигатель . Когда-то они встречались в промышленных растворах, хотя и там были редкостью. В настоящее время они практически не используются и расцениваются как диковинки. Двухфазные двигатели устроены аналогично однофазным двигателям и работают по тому же принципу. Основное отличие состоит в том, что роль пусковой обмотки, встречающейся в однофазных двигателях, выполняет симметричная основной обмотка, сдвинутая на 90 градусов. Для получения фазового сдвига, близкого к 90 градусам, необходимо, как и в случае однофазных двигателей , использовать конденсатор с правильным значением емкости. Кроме того, требуется двухфазная система, что нецелесообразно — большинство нагрузок питаются от однофазных или трехфазных источников питания. По этой причине двухфазные двигатели не получили большого распространения. В настоящее время они практически полностью заменены однофазными и трехфазными двигателями, которые гораздо более практичны и универсальны.
Однофазные и трехфазные двигатели имеют очень широкий спектр применения и поэтому имеют разные параметры. Чтобы найти двигатель, подходящий для вашего проекта, ознакомьтесь с ассортиментом однофазных и трехфазных электродвигателей TME. Наш широкий ассортимент продукции позволяет легко найти двигатель для промышленной и бытовой техники. Наше предложение адресовано как индивидуальным, так и бизнес-клиентам, поэтому в нашем ассортименте вы обязательно найдете то, что ищете.
Поделитесь этой статьей
Почему трехфазные двигатели обычно используются с насосами?
Перейти к основному содержанию
Гидравлического института
25. 11.2021
Почему трехфазные двигатели обычно используются с насосами?
ИЗОБРАЖЕНИЕ 1: Соотношение между тремя фазами тока
Трехфазные асинхронные двигатели переменного тока (AC) более распространены в коммерческих и промышленных насосных установках, чем однофазные двигатели. Вот некоторые из причин:
- Отдельный фазный ток трехфазного двигателя составляет менее 60 % фазного тока сравнимого однофазного двигателя. В результате трехфазные двигатели доступны с более высокой номинальной мощностью.
- Трехфазный двигатель, как правило, более эффективен, чем аналогичный однофазный двигатель.
- Трехфазный асинхронный двигатель переменного тока легче запустить, чем однофазный асинхронный двигатель.
На рисунке 1 показано, как максимальный ток передается от фазы A к фазе B и фазе C в трехфазном двигателе. После этой последовательности максимальный ток следует той же схеме, но с обратной полярностью.
На Рисунке 2 показано, как трехфазные токи создают магнитное поле, которое плавно вращается внутри двигателя. Магнитные полюса имеют цветовую кодировку, чтобы соответствовать цвету фона графиков тока в каждой фазе. Большие буквы N и S рядом с полюсами на Рисунке 2 указывают местоположение пикового магнитного поля. Маленькие буквы N и S показывают места с более слабыми магнитными полями.
Обратите внимание, как магнитное поле перемещается между полюсами и заставляет ротор вращаться в определенном направлении. Поскольку переменный ток синусоидальный, магнитное поле каждой фазы также синусоидальное. Это приводит к чистому магнитному полю, которое плавно вращается внутри двигателя.
ИЗОБРАЖЕНИЕ 2: Движение магнитного поля в трехфазном двигателе
Для получения дополнительной информации об электродвигателях см. «Руководство по применению драйверов: электрические двигатели» Института гидравлики на сайте www.pumps.org/guidebooks.
HI Pump FAQs® производится Институтом гидравлики в качестве услуги для пользователей насосов, подрядчиков, дистрибьюторов, торговых представителей и OEM-производителей. Для получения дополнительной информации посетите сайт pumps.org.
Выпуск
Ноябрь 2021 г.
- Дом
- Темы
- Насосы
- Уплотнения
- Подшипники
- Клапаны
- Двигатели и приводы
- Инструментарий
- Инсайдер индустрии насосов
- Компрессоры
- Фильтры
- Трубопровод
- Журнал
- Поиск по выпуску
- Цифровое издание
- Анализ рынка
- Столбцы
- Амин Алмаси
- Гэри Дайсон
- Джим Элси
- Джо Эванс
- Доминик Фрай
- Рэй Харди
- Уильям Ливоти
- Лев Нелик
- Департаменты
- Вернуться к основам
- Эффективность имеет значение
- Расходомеры
- Техническое обслуживание
- Двигатели и приводы
- Чувство уплотнения
- Часто задаваемые вопросы о насосе HI
- Подготовка
- Ресурсы
- Цифровое издание
- Подкасты
- Справочник производителя
- От наших партнеров
- Белые бумаги
- Вебинары
- электронные книги
- Рекламные видео
- Видеопрезентация продукции WEFTEC 2021
- Новости
- События
- Учебный центр Гидравлического института
- Учебный центр SWPA
- Подписывайся
- Обслуживание клиентов
- О нас
- Редакционные правила
- Рекламировать
- Подписывайся
- Свяжитесь с нами
- Конфиденциальность данных
Асинхронные и асинхронные двигатели
Асинхронный или асинхронный двигатель представляет собой двигатель переменного тока, работающий по принципу электромагнитной индукции, т. е. ротор получает крутящий момент под действием вращающегося магнитного поля, создаваемого в статоре, и тогда ротор может вращаться. Обычно скорость вращения ротора асинхронного двигателя не равна скорости вращающегося магнитного поля (синхронная скорость), поэтому асинхронный двигатель также известен как асинхронный двигатель. По типу переменного тока различают однофазные и трехфазные асинхронные двигатели.
Какие типы асинхронных двигателей продаются на ATO.com?
При покупке асинхронного двигателя в первую очередь обращают внимание на скорость, напряжение, крутящий момент и мощность. Другие вещи, которые вы должны принять во внимание, это рабочая система, требования к перегрузке, класс изоляции, класс защиты, момент инерции, нагрузка, метод установки, техническое обслуживание, температура окружающей среды, высота над уровнем моря, рейтинг корпуса, внешняя среда, энергоэффективность и т. д. Теперь ATO предлагает вам надежные и экономичные асинхронные двигатели и помогает вам сделать лучший выбор при покупке.
Однофазные асинхронные двигатели
Асинхронный двигатель, работающий от однофазного источника переменного тока, называется однофазным асинхронным двигателем. Поскольку однофазным асинхронным двигателям требуется только однофазный переменный ток, они просты в использовании и широко используются, а также имеют преимущества простой конструкции, низкой стоимости, низкого уровня шума и небольших помех для радиосистем, поэтому они часто используются в бытовая техника и маломощная техника малой мощности. Среди них, такие как электровентиляторы, стиральные машины, холодильники, кондиционеры, вытяжки, электродрели и медицинское оборудование.
Трехфазные асинхронные двигатели
Трехфазный асинхронный двигатель — это тип асинхронного двигателя, который питается от трехфазного переменного тока. По сравнению с однофазными асинхронными двигателями трехфазные асинхронные двигатели имеют лучшие рабочие характеристики и позволяют экономить различные материалы. Трехфазный асинхронный двигатель в основном используется при земляных работах, транспортировке жидкостей и других областях, которые должны обеспечивать питание, таких как станки, малое и среднее оборудование для прокатки стали, вентиляторы, насосы, оборудование легкой промышленности, металлургическое и горнодобывающее оборудование и т. д.
Взрывозащищенный двигатель
Взрывозащищенный двигатель — это тип двигателя, который можно использовать в легковоспламеняющихся и взрывоопасных средах и который не производит электрических искр при работе. Взрывозащищенные двигатели в основном используются в угольных шахтах, нефтегазовой, нефтехимической и химической промышленности. Кроме того, в текстильной, металлургической, городской газовой, транспортной, зерновой и нефтеперерабатывающей, бумажной, медицинской и других отраслях также широко используются. В качестве основного энергетического оборудования взрывозащищенные двигатели обычно используются для привода насосов, вентиляторов, компрессоров и других передаточных механизмов и т. д.
Тормозной двигатель
Тормозной двигатель представляет собой полностью закрытый трехфазный асинхронный двигатель с короткозамкнутым ротором и самовентилятором с дополнительным дисковым тормозом постоянного тока. Он состоит из двигателя постоянного тока с дисковым электромагнитным тормозом, прикрепленного между задней торцевой крышкой двигателя серии Y и вентилятором. Это производная серия серии Y. Он имеет преимущества быстрого торможения, простой конструкции, высокой надежности и высокой универсальности. Двигатели с тормозом широко используются в различном механическом оборудовании и передаточных устройствах, требующих быстрой остановки и точного позиционирования.
Двигатель с переменной скоростью
Двигатель с переменной скоростью — это двигатель, который изменяет скорость двигателя путем изменения количества ступеней, напряжения, тока, частоты и т. д., чтобы двигатель мог достичь более высокой производительности. . Благодаря своим превосходным характеристикам двигатели с регулируемой скоростью широко используются в сталелитейной, электростанции, кабельной, химической, нефтяной, цементной, текстильной, полиграфической и красильной, бумагоделательной, машиностроительной и других отраслях промышленности для бесступенчатого регулирования скорости нагрузочного оборудования с постоянным крутящим моментом. или уменьшение крутящего момента.
Двигатель из нержавеющей стали
Конструкция двигателя из нержавеющей стали позволяет избежать плоских поверхностей, трещин и щелей, предотвращая скопление посторонних предметов и бактерий. Его корпус и кабели могут ежедневно выдерживать высокое давление, высокую температуру и агрессивные химические промывки. Надежная конструкция означает, что двигатель можно чистить без использования ограждений и крышек для его защиты. Эти функции обеспечивают более быструю очистку, более длительное время безотказной работы и более высокую общую эффективность оборудования линии.
Каковы преимущества асинхронных двигателей ATO?
- Различные методы управления : Поскольку асинхронный двигатель не имеет постоянного магнита, проще достичь различных скоростей и крутящих моментов за счет ослабления магнитного поля или преобразования частоты и т. д. Его можно использовать в промышленных или бытовых приложениях, не требующих высоких плотность крутящего момента и имеет преимущества самозапуска, экономичности и надежности.
- Низкая стоимость : Асинхронные двигатели дешевы по сравнению с синхронными двигателями и двигателями постоянного тока. Это определяется конструкцией асинхронного двигателя. Таким образом, асинхронные двигатели являются лучшим выбором для приложений с фиксированной скоростью в промышленности, а также для коммерческих и бытовых приложений, где можно легко подключить питание переменного тока.
- Низкие затраты на техническое обслуживание : Конструкция асинхронного двигателя проста, поэтому техническое обслуживание также легко, что снижает затраты на техническое обслуживание.
- Простота в эксплуатации : Асинхронные двигатели являются самозапускающимися двигателями (работают сами по себе с переменным током). Он работает легко, так как на роторе нет электрического разъема.
- Изменение скорости : Изменение скорости асинхронного двигателя является постоянным. Скорость изменяется всего на несколько процентов от холостого хода до номинальной нагрузки.
- Высокий пусковой крутящий момент : Асинхронные двигатели имеют высокий пусковой крутящий момент, что позволяет приложить нагрузку до запуска двигателя. Трехфазные асинхронные двигатели имеют другой пусковой момент, чем синхронные двигатели. Однако однофазный асинхронный двигатель не имеет момента самозапуска и может вращаться только с помощью некоторых вспомогательных средств.
- Долговечность : Еще одним преимуществом асинхронных двигателей является долговечность, которая позволяет двигателю работать в течение многих лет без каких-либо затрат и обслуживания.
Управление трехфазным асинхронным двигателем с помощью ЧРП и ПЛК
Различные процессы автоматизации в промышленности требуют управления асинхронными двигателями переменного тока с помощью приводов переменного тока. Здесь представлена надежная система включения/выключения, изменения скорости и направления вращения промышленного трехфазного асинхронного двигателя с использованием ЧРП и ПЛК. Мы используем здесь двигатель переменного тока Delta для его работы.
Простая панель управления подключается с помощью ПЛК Allen Bradley для демонстрации. Также может быть разработана расширенная SCADA Intouch Wonderware.
Электродвигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую. В случае работы от трехфазного переменного тока наиболее широко используемым двигателем является трехфазный асинхронный двигатель, поскольку этот тип двигателя не требует какого-либо пускового устройства, поскольку он является самозапускающимся двигателем.
Рис. 1: Схема всей системыРис. 2: Блок-схема привода
Что такое приводы
Часто в промышленности возникает необходимость управления скоростью трехфазного асинхронного двигателя. Приводы переменного тока Delta способны эффективно управлять скоростью двигателя, улучшать автоматизацию машин и экономить энергию. Каждый привод серии частотно-регулируемых приводов (VFD) предназначен для удовлетворения конкретных потребностей применения.
Приводы переменного тока точно контролируют крутящий момент, плавно справляются с повышенной нагрузкой и обеспечивают множество настраиваемых режимов управления и настройки. ЧРП можно использовать для изменения скорости, направления и других параметров трехфазного двигателя. Мы используем 2-проводной метод для управления скоростью и направлением двигателя.
Работа частотно-регулируемого привода
Первая ступень частотно-регулируемого привода представляет собой преобразователь, состоящий из шести диодов, которые аналогичны обратным клапанам, используемым в водопроводных системах. Они позволяют току течь только в одном направлении; направление, указанное стрелкой на символе диода. Например, всякий раз, когда напряжение фазы A (напряжение аналогично давлению в водопроводных системах) более положительное, чем напряжение фазы B или C, этот диод открывается и пропускает ток.
Когда фаза B становится более положительной, чем фаза A, диод фазы B открывается, а диод фазы A закрывается. То же самое верно для трех диодов на отрицательной стороне шины. Таким образом, мы получаем шесть импульсов тока при открытии и закрытии каждого диода. Это называется 6-импульсным частотно-регулируемым приводом, который является стандартной конфигурацией для современных частотно-регулируемых приводов.
Мы можем избавиться от пульсаций переменного тока на шине постоянного тока, добавив конденсатор. Конденсатор работает аналогично резервуару или аккумулятору в водопроводной системе. Он поглощает пульсации переменного тока и выдает плавное постоянное напряжение.
Преобразователь диодного моста, который преобразует переменный ток в постоянный, иногда называют просто преобразователем. Преобразователь, который преобразует постоянный ток обратно в переменный, также является преобразователем, но, чтобы отличить его от диодного преобразователя, его обычно называют инвертором. В отрасли стало обычным называть любой преобразователь постоянного тока в переменный инвертором.
Когда мы замыкаем один из верхних переключателей инвертора, эта фаза двигателя подключается к положительной шине постоянного тока, и напряжение на этой фазе становится положительным. Когда мы замыкаем один из нижних переключателей в преобразователе, эта фаза подключается к отрицательной шине постоянного тока и становится отрицательной. Таким образом, мы можем сделать любую фазу на двигателе положительной или отрицательной по желанию и, таким образом, можем генерировать любую частоту, которую захотим. Таким образом, мы можем сделать любую фазу положительной, отрицательной или нулевой.
Рис. 3: Модель схемы ЧРПРис. 4: Формы сигналов при различных рабочих частотах и средних напряжениях
Обратите внимание, что выходной сигнал частотно-регулируемого привода имеет прямоугольную форму. ЧРП не производят синусоидальный выходной сигнал. Эта прямоугольная форма волны не подходит для распределительной системы общего назначения, но вполне подходит для двигателя.
Если мы хотим снизить частоту двигателя, мы просто переключаем выходные транзисторы инвертора медленнее. Но если мы уменьшаем частоту, мы также должны уменьшать напряжение, чтобы сохранить отношение В/Гц. Широтно-импульсная модуляция (ШИМ) делает это.
Представьте, мы могли бы контролировать давление в водопроводе, включая и выключая клапан на высокой скорости. Хотя это было бы непрактично для сантехнических систем, это очень хорошо работает для частотно-регулируемых приводов.
Обратите внимание, что в течение первого полупериода напряжение присутствует в половине случаев, а остальное время отсутствует. Таким образом, среднее напряжение составляет половину от 480В, то есть 240В. Импульсируя выход, мы можем добиться любого среднего напряжения на выходе ЧРП.
Выбор Delta VFD-M в качестве привода переменного тока
Рис. 5: Delta VFD-M
Delta VFD-M — векторный микропривод переменного тока без датчиков. Его компактная конструкция идеально подходит для малой и средней мощности. Привод M предназначен для обеспечения сверхмалошумной работы и включает в себя несколько инновационных технологий, уменьшающих помехи.
Этот привод может иметь множество применений, таких как упаковочная машина, машина для производства клецок, беговая дорожка, вентилятор с контролем температуры/влажности для сельского хозяйства и аквакультуры, миксер для пищевой промышленности, шлифовальный станок, сверлильный станок, малогабаритный гидравлический токарный станок, элеватор, оборудование для нанесения покрытий. , малогабаритный фрезерный станок, робот-манипулятор литьевой машины (зажим), деревообрабатывающий станок (двухсторонний деревообрабатывающий станок), кромкогибочный станок, эластификатор и т.д.
Рис. 6: Схема подключения для VFD-MРис. 7: Управление цифровой клавиатурой на Delta VFD-M
Шаги для полного управления двигателем
- Проверьте соединения L1, L2, L3; T1, T2, T3 (используются для подачи 3-фазного входа на VFD и подключения к нему двигателя) и провода, выходящие из M0, M1 и GND.
- Включите трехфазное питание.
- Для программирования VFD-M:
(i) Нажмите Mode
(ii) На F60.0 нажмите Enter
(iii) Нажмите Mode
(iv) Выберите соответствующий параметр, используя клавиши Up/Down на клавиатуре.
(v) Например, для Pr0 выберите P 00.
(vi) Согласно инструкции установите параметры для требуемого режима работы
(vii) Нажмите EnterEnd
Примечание: В любой момент нажмите Mode, чтобы перейти к предыдущему шагу.
Для двигателя, работающего от внешнего управления, у нас есть три режима работы; два 2-проводных метода и один 3-проводной метод. Помимо этого, существует метод по умолчанию, которым можно управлять с цифровой клавиатуры.
Сначала выполните пробный запуск, чтобы проверить все соединения.
Пробный запуск ЧРП
Заводская установка источника управления с цифровой клавиатуры (Pr.01=00). Вы можете выполнить пробный запуск, используя цифровую клавиатуру, выполнив следующие действия:
- После подачи питания убедитесь, что на дисплее отображается F60. 0Hz. Когда привод переменного тока находится в режиме ожидания, загораются светодиоды STOP и FWD.
- Нажмите клавишу вниз, чтобы установить частоту на 5 Гц.
- Нажмите кнопку запуска. Светодиод RUN и светодиод FWD загорятся, указывая на то, что рабочая команда запущена в прямом направлении. И если вы хотите перейти на обратный ход, вы должны нажать клавишу вниз. А если вы хотите замедлиться до остановки, нажмите кнопку стоп/сброс.
Программирование VFD-M
Имеется два контакта, M0 и M1. Всякий раз, когда M0 замыкается, ЧРП переходит в рабочий режим. Если он открыт, двигатель не вращается. M1 определяет направление вращения. Если M1 открыт, он вращается в прямом направлении; если закрыто, в обратном направлении.
Параметры для вышеуказанного режима установлены следующим образом:
Параметр 00 установлен на 01 (для управления основной частотой с помощью потенциометра)
Параметр 01 установлен на 01 (внешнее управление через M0, M1)
Параметр 38 установлен на 01 ( M0, M1 устанавливаются как пуск/стоп и вперед/назад)
Установите параметр 00 на 00 для управления основной частотой с помощью цифровой клавиатуры и на 01 для управления с помощью потенциометра, подключенного, как показано на схеме подключения первого контакта.
Pr.38 должен быть установлен на 01, как показано на диаграмме выше.
После того, как все эти параметры установлены, следуйте инструкциям по двухпроводному режиму для запуска двигателя.
Рис. 8: Двухпроводное управление: Только параметр 38 может быть установлен на «1»
Рис. 9: Лестничная диаграмма для управления
Использование ПЛК
Рис. 10: Плата управления для управления двигателем
Программируемые логические контроллеры (ПЛК) очень эффективно поддерживают цифровой ввод/вывод. Таким образом, ПЛК также можно использовать для управления работой частотно-регулируемого привода и, следовательно, для управления подключенным трехфазным асинхронным двигателем.
Рис. 11: Подключение ПЛК Allen Bradley
ПЛК Allen Bradley MicroLogix 1000 подключается к Delta VFD-M и программируется с использованием релейной логики с использованием RS Logix.
Мы подключили M0 и M1 к O2 и O3 (выходам) ПЛК и управляли O2 и O3 с помощью лестничной логики. На рис. 4 показана логика, определенная для режима 01, то есть Pr.38 = 01. O:0.0/2 подключен к M0.
Рис. 12: Изменение скорости асинхронного двигателя с помощью потенциометра
При установке I:0.0/2 двигатель переходит в рабочий режим. Теперь, даже если I:0.0/2 выключен, O:0.0/2 остается включенным благодаря определенной логике. Его можно остановить только повторным нажатием I:0.0/2.
I:0.0/3 управляет O:0.0/5, который, в свою очередь, подключен к M1, который определяет направление вращения двигателя.
Рис. 13: Трехфазный асинхронный двигатель
0:0.0/3 — это светодиод, который загорается, когда двигатель находится в рабочем режиме.
0:0.0/5 — это светодиод, который загорается, когда двигатель работает в прямом направлении, и гаснет при обратном вращении.
Нравится читать эту статью? Вам также может понравиться Создание системы управления ПК с использованием Wonderware InTouch SCADA и ПЛК Allen Bradley
Джоби Энтони — магистр компьютерных технологий из США, в настоящее время работает инженером F в Межуниверситетском ускорительном ядерном центре (IUAC). ), Нью-Дели. Он также был приглашенным ученым в ЦЕРНе, Женева
Акшай Кумар — студент бакалавриата технических наук в Делийском технологическом университете, Нью-Дели, в настоящее время проходит стажировку в IUAC
Эта статья была впервые опубликована 22 июля 2016 г. и недавно обновлена 27 декабря 2018 г.
- БИРКИ
- с изображением
- двигатель
Предыдущая статьяОбъяснение схемы стабилитрона на двух биполярных транзисторах
Следующая статьяДетектор мобильных телефонов с использованием LM358
Топ-10 пользователей в таблице лидеров ElectronicsForU
| № | Имя | Очки опыта |
|---|---|---|
| 1 | АБУЗАНАЗАД | 70 |
| 2 | Чакра буана электриндо | 68 |
| 3 | марксон010 | 62 |
| 4 | низкая латунь40 | 62 |
| 5 | роннамадрид | 62 |
| 6 | Харриетскотт | 62 |
| 7 | азусенак79 | 61 |
| 8 | Гурдип Сингх | 61 |
| 9 | эльсабабыг | 61 |
| 10 | Хари19772009 | 61 |
Проверить таблицу лидеров
Что нового @ Electronicsforu.