Содержание
Биполярные и униполярные шаговые двигатели
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля
должна
переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с
двухполярным
питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. а).
Посмотреть технические характеристики и купить шаговые двигатели.
Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это
позволяет
изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При
этом
существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в
Драйвер должен иметь только 4 простых ключа. Таким образом, в
униполярном
двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут
быть объединены
внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. б) . Иногда униполярные
двигатели имеют
раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет
отдельные
выводы, поэтому всего выводов 8 (рис. в). При соответствующем соединении обмоток такой двигатель можно
использовать как
униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в
биполярном
режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не
превысить
максимальной рассеиваемой мощности.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную
мощность. При
При
одних и тех же размерах биполярные двигатели обеспечивают больший момент.
купить шаговый двигатель
купить блок управления шаговым двигателем
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками
статора. Путь
для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при
повышении
тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует
редко.
Гораздо более существенным является ограничение по нагреву двигателя вследствии омических потерь в обмотках.
Как раз
этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент
времени
используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает
Другая половина просто занимает место в окне сердечника, что вынуждает
делать
обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е.
их
использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое
сопротивление –
соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает
выигрыш в
моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить
габариты или
просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они
требуют
значительно более простых схем управления обмотками.
Управление шаговым двигателем с помощью Arduino
В этой статье описано управление шаговым двигателем на Ардуино, снятым со старого принтера, с помощью контроллера Arduino.
Шаг 1: Шаговый двигатель
Две основных детали шагового двигателя – ротор и статор. Ротор – вращающаяся часть, она, собственно, и делает всю работу, а статор – неподвижная часть, в которую помещен ротор. В шаговом двигателе ротор – постоянный магнит. Статор состоит из нескольких катушек, которые становятся электромагнитами при прохождении через них тока. При прохождении импульса через обмотки катушек, электромагнитное поле взаимодействует с постоянным магнитом, в результате чего ротор двигается. Вращение ротора обеспечивается чередованием обмоток, на которые подается напряжение.
Шаговые двигатели обладают рядом преимуществ. Они недороги и просты в использовании. Если не подавать на обмотки напряжение, положение ротора фиксируется. Изменение направления вращения ротора происходит за счет изменения последовательности подачи импульсов на катушки.
Шаг 2: Список материалов
Показать еще 5 изображений
Для управления биполярным шаговым двигателем вам понадобятся:
- шаговый двигатель
- микроконтроллер Arduino
- изолированный медный провод
- стабилизатор тока
- транзистор
- Н-мост (мостовая схема драйвера)
- плата расширения MotorShield
Опционально:
- паяльник
- припой
- паяльный фен
- третья рука для пайки
- защитные очки
Шаг 3: Припаиваем провода
У большинства шаговых двигателей имеются четыре вывода, поэтому нужны четыре отрезка медного провода (цвет не имеет значения, я использовал отрезки разных цветов для наглядности). Эти выводы нужны для управления порядком работы катушек. Так как данный двигатель снят с принтера, то пайка проводов к нему была самой простой частью проекта.
Эти выводы нужны для управления порядком работы катушек. Так как данный двигатель снят с принтера, то пайка проводов к нему была самой простой частью проекта.
Шаг 4: Скетч для Arduino
В контроллерах Arduino имеется предустановленная библиотека для шаговых двигателей. Вам нужно перейти во вкладку Файл – Примеры – Stepper — stepper_oneRevolution (File > Examples > Stepper >stepper_oneRevolution). Дальше вам нужно настроить количество шагов под свой конкретный двигатель (stepsPerRevolution). Поискав в интернете, я выяснил, что у моего двигателя 48 шагов на оборот. Библиотека Stepper чередует импульсы, посылаемые на обмотку катушек (проиллюстрировано в гиф-файле).
Шаг 5: Что такое Н-мост (мостовая схема драйвера)
Н-мост – схема, состоящая из четырех переключателей, чаще используются простые транзисторы. Транзистор – полупроводниковый ключ – включается при прохождении тока через один из пинов. Использование одного транзистора даст возможность контролировать только скорость, тогда как Н-мост дает еще и возможность контролировать направление вращения. Это происходит за счет того, что выключение разных переключателей позволяет току течь в разных направлениях, меняя тем самым полярность. Переключатели 1, 2, 3 и 4 никогда не должны включаться вместе, это вызовет короткое замыкание и может повредить устройство.
Это происходит за счет того, что выключение разных переключателей позволяет току течь в разных направлениях, меняя тем самым полярность. Переключатели 1, 2, 3 и 4 никогда не должны включаться вместе, это вызовет короткое замыкание и может повредить устройство.
Н-мост не даст контроллеру перегореть при работе двигателя. Мотор создает сильное магнитное поле. Когда ток перестает поступать, энергия магнитного поля преобразуется в электрическую, это может повредить компоненты. Н-мост помогает защитить контроллер от повреждений. Никогда не подключайте двигатель напрямую к Arduino.
Н-мост легко собрать самим, а имеющиеся в продаже стоят недорого. В данном проекте используется Н-мост L293NE/SN754410.
Его распиновка:
- Пин 1 (1, 2EN) —> Мотор 1 Вкл/Выкл (HIGH/LOW)
- Пин 2 (1A) —> Мотор 1 Логический вывод1
- Пин 3 (1Y) —>Мотор 1 Штыревой вывод 1
- Пин 4 —>Земля
- Пин 5 —>Земля
- Пин 6 (2Y) —>Мотор 1 Штыревой вывод 2
- Пин 7 (2A) —> Мотор 1 Логический вывод 2
- Пин 8 (VCC2) —>Питание для двигателей
- Пин 9 —>Мотор 2 Вкл/Выкл (HIGH/LOW)
- Пин 10 —>Мотор 2 Логический вывод 1
- Пин 11 —>Мотор 2 Штыревой вывод 1
- Пин 12 —>Земля
- Пин 13 —>Земля
- Пин 14 —>Мотор 2 Штыревой вывод 2
- Пин 15 —>Мотор 2 Логический вывод 2
- Пин 16 (VCC1) —>Питание Н-моста (5 В)
Шаг 6: Подключение компонентов
4 штыревых вывода Н-моста должны подключаться к четырем выводам. 4 логических вывода подключаются к Arduino (в этой статье это 8, 9, 10 и 11 выводы). На схеме видно, что для питания можно использовать внешний источник питания. Н-мост работает при напряжении в диапазоне 4,5-36 В.
4 логических вывода подключаются к Arduino (в этой статье это 8, 9, 10 и 11 выводы). На схеме видно, что для питания можно использовать внешний источник питания. Н-мост работает при напряжении в диапазоне 4,5-36 В.
Шаг 7: Загрузка кода и тест
Загрузите код в Arduino. Если вы ошиблись при подключении, мотор вместо вращения начнет вибрировать. Попробуйте разные скорости и направления вращения, чтобы понять, что вам нужно.
Драйвер биполярного шагового двигателя — PoStep25-256
17,80 € вкл. НДС и стоимость доставки
PoStep25-256 — это высокопроизводительный и экономичный драйвер шагового двигателя для реализации интеллектуального управления шаговым двигателем — плавная настройка . Драйвер включает в себя усовершенствованную архитектуру и технологию поверхностного монтажа для достижения исключительной плотности мощности.
Драйвер биполярного шагового двигателя
— количество PoStep25-256
— ИЛИ —
— ИЛИ —
Артикул
: Драйвер биполярного шагового двигателя — PoStep25-256
Категории: Драйверы, Двигатели, Драйверы и мощность
Теги: Драйвер биполярного шагового двигателя, PoStep, Драйвер шагового двигателя
Описание
Дополнительная информация
Загрузки
Отзывы (0)
Описание
PoStep25-256 — это высокопроизводительный и недорогой драйвер биполярного шагового двигателя с плавной настройкой — управление шаговым двигателем.
PoStep25-256 — это высокопроизводительный экономичный драйвер шагового двигателя с плавной настройкой — интеллектуальным управлением шаговым двигателем. Драйвер включает в себя передовую архитектуру и технологию поверхностного монтажа для достижения исключительной плотности мощности. К тому же медь на печатной плате в 2 раза толще, чем в большинстве печатных плат. В заключение, PoStep25-256 имеет современную тепловую конструкцию. Толстая медь и дополнительный радиатор гарантируют наилучшие тепловые характеристики и низкий нагрев. Малая занимаемая площадь, высокая удельная мощность и прочная конструкция являются ключом к надежному управлению биполярным шаговым двигателем.
Может управлять биполярными шаговыми двигателями с максимальной силой тока 2,5 А. Помимо Nema17, также можно управлять некоторыми шаговыми двигателями Nema23.
Функции PoStep25-256
- Фазный ток от 0,5 до 2,5 А,
- Простая установка тока с помощью перемычки,
- Совместим с 4-, 6- и 8-проводными шаговыми двигателями любого напряжения,
- Источник питания от +9 В до +30 В постоянного тока,
- Защита от обратного напряжения питания,
- 1, 2, 4, 8, 16, 32, 64, 128 и 256 микрошагов на шаг
- 2 микрошага в режиме высокого крутящего момента
- Макс.
 частота шагов 500 кГц
частота шагов 500 кГц - Логические совместимые входы 3 В и 5 В,
- Рабочая температура от 0°C до 70°C,
- Светодиод питания, индикаторы ошибки и включения,
- Малый размер 48 мм X 48 мм,
- Более плавное и бесшумное движение шагового двигателя,
- Улучшенный крутящий момент,
- Функции защиты:
- Защита от перегрузки по току,
- Обнаружение открытой нагрузки,
- Термическое отключение,
- Выход состояния неисправности,
- Блокировка при пониженном напряжении.
 частота шагов 500 кГц
частота шагов 500 кГцДополнительная информация
| Вес | 21 г |
|---|---|
| Размеры | 1 × 1 × 1 см |
Загрузки
PoStep25-256 руководство пользователя
PoStep25-256 3d модель
Только авторизованные клиенты, которые приобрели этот продукт, могут оставить отзыв.
Вам также может понравиться…
PoPower24-100 Импульсный блок питания 24В 100Вт
24,90 € вкл.
НДС и доставка
В корзинуШаговый двигатель NEMA-17 (двойной вал SY42STh57-1684B)
17,00 € – 45,00 € вкл. НДС и доставка
Выберите опцииUSB контроллер ЧПУ – PoKeys57U – авиасимуляторы, автоматизация
42,00 € – 50,00 € вкл. НДС и доставка
Выберите вариантыКонтроллер ЧПУ USB и Ethernet – PoKeys57CNC
119,00 € вкл. НДС и доставка
В корзинуКонтроллер ЧПУ Ethernet – PoKeys57E – авиасимуляторы, автоматизация
52,00 € – 60,00 € вкл. НДС и доставка
Выберите опцииКабельный пакет PoKeys57CNC
18,90 € вкл. НДС и доставка
В корзинуШаговый двигатель NEMA-17 (одновальный SY42STh57-1684A)
17,00 € – 45,00 € вкл. НДС и доставка
Выберите опции
 НДС и доставка
НДС и доставка Контроллер биполярного шагового двигателя — слаботочный
Перейти к содержимому
Одноосный малоточный контроллер шагового двигателя (SSMicroLC-4x)
236 $
Одноосевой биполярный шаговый контроллер для двигателей до 1,5 А на фазу.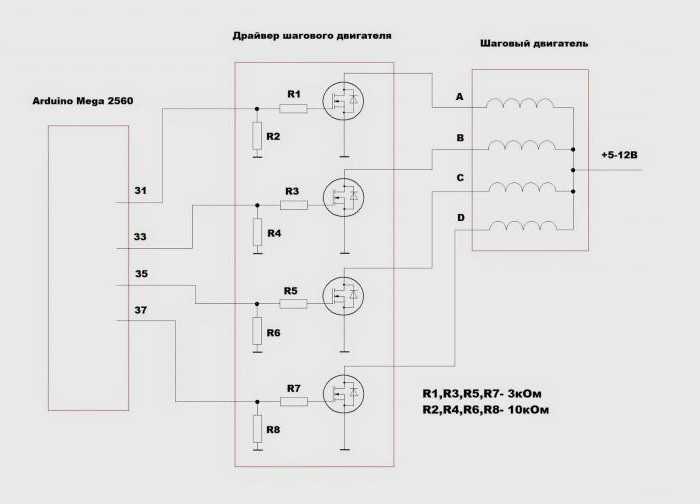 (** Все продукты теперь не имеют предустановленных коммуникационных плат, и теперь клиенты должны указывать и приобретать коммуникационные платы отдельно, чтобы создать полную систему. )
(** Все продукты теперь не имеют предустановленных коммуникационных плат, и теперь клиенты должны указывать и приобретать коммуникационные платы отдельно, чтобы создать полную систему. )
Количество
Одноосный малоточный контроллер шагового двигателя (SSMicroLC-4x)
Описание
Дополнительная информация
Технические характеристики
| Минимум | Максимум | |
|---|---|---|
| Соответствует RoHS | Да | |
| Общая ось двигателя/плата: | 1 | |
| Тип привода двигателя (на ось): | Драйвер биполярного шагового двигателя | |
| Диапазон шага драйвера двигателя (на ось): | Полный, 1/2, 1/4, 1/8, 1/16, 1/32 | |
| Шаговая скорость двигателя (на ось): | 1 с/с | 30 000 с/с |
| Предварительный делитель шагового двигателя (на ось): | Да (от 1 (по умолчанию) до 255) (предделитель=255=0,003922 с/с) | |
| Режимы мощности холостого хода двигателя (на ось): | От ВЫКЛ до максимального значения | |
| Настройка управления максимальным током (на ось): | Программное управление Одиночный 8-битный ЦАП | |
| Контроль затухания тока драйвера (на ось) | Да | |
| Защита от короткого замыкания фазы драйвера: | Да | |
| Защита драйвера от перегрева: | Да | |
| Температура соединения драйвера (тепловое отключение): | — | +165 градусов C (+329 градусов F) |
| Ограничения тока двигателя (на ось) Работа: Холостой ход: | 0,100 А/фаза 0,00 А/фаза | 1,50 А/фаза До максимального значения |
| Рабочее напряжение: | 15,0 В пост. тока тока | 50,0 В пост. тока |
| Диапазон температур окружающей среды Эксплуатация: Хранение: | 0 градусов C (32 градуса F) -40 градусов C (-40 градусов F) | +70 градусов C (158 градусов F) +125 градусов C ( 257 градусов по Фаренгейту) |
| Максимальное количество плат SSXYMicro на одной (1) последовательной линии | 16 | |
| Средства связи: | Платы связи продаются отдельно | |
| Скорость передачи данных: | 9600, 19200, 38400, 57600 (по умолчанию), 115200, 230400, 460800 | |
| Вход датчика исходного положения (на ось): | Инфракрасный (ток ограничен 25 мА) Вход датчика или прямой привод 5 В постоянного тока | |
| Вход датчика ограничения (на ось): | Тип входа микропереключателя (нормально открытый) | |
| Выделенные линии пользовательского ввода (на ось): | 3 входа со встроенными подтяжками 10K, вход 0–5,0 В пост.
| |