Содержание
Биполярные и униполярные шаговые двигатели
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. а).
Посмотреть технические характеристики и купить шаговые двигатели.
Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. б) . Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
б) . Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
купить шаговый двигатель
купить блок управления шаговым двигателем
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствии омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями.
Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствии омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками.
На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками.
Управление шаговым двигателем с помощью Arduino
В этой статье описано управление шаговым двигателем на Ардуино, снятым со старого принтера, с помощью контроллера Arduino.
Шаг 1: Шаговый двигатель
Две основных детали шагового двигателя – ротор и статор. Ротор – вращающаяся часть, она, собственно, и делает всю работу, а статор – неподвижная часть, в которую помещен ротор. В шаговом двигателе ротор – постоянный магнит. Статор состоит из нескольких катушек, которые становятся электромагнитами при прохождении через них тока. При прохождении импульса через обмотки катушек, электромагнитное поле взаимодействует с постоянным магнитом, в результате чего ротор двигается. Вращение ротора обеспечивается чередованием обмоток, на которые подается напряжение.
Шаговые двигатели обладают рядом преимуществ. Они недороги и просты в использовании. Если не подавать на обмотки напряжение, положение ротора фиксируется. Изменение направления вращения ротора происходит за счет изменения последовательности подачи импульсов на катушки.
Если не подавать на обмотки напряжение, положение ротора фиксируется. Изменение направления вращения ротора происходит за счет изменения последовательности подачи импульсов на катушки.
Шаг 2: Список материалов
Показать еще 5 изображений
Для управления биполярным шаговым двигателем вам понадобятся:
- шаговый двигатель
- микроконтроллер Arduino
- изолированный медный провод
- стабилизатор тока
- транзистор
- Н-мост (мостовая схема драйвера)
- плата расширения MotorShield
Опционально:
- паяльник
- припой
- паяльный фен
- третья рука для пайки
- защитные очки
Шаг 3: Припаиваем провода
У большинства шаговых двигателей имеются четыре вывода, поэтому нужны четыре отрезка медного провода (цвет не имеет значения, я использовал отрезки разных цветов для наглядности). Эти выводы нужны для управления порядком работы катушек. Так как данный двигатель снят с принтера, то пайка проводов к нему была самой простой частью проекта.
Шаг 4: Скетч для Arduino
В контроллерах Arduino имеется предустановленная библиотека для шаговых двигателей. Вам нужно перейти во вкладку Файл – Примеры – Stepper — stepper_oneRevolution (File > Examples > Stepper >stepper_oneRevolution). Дальше вам нужно настроить количество шагов под свой конкретный двигатель (stepsPerRevolution). Поискав в интернете, я выяснил, что у моего двигателя 48 шагов на оборот. Библиотека Stepper чередует импульсы, посылаемые на обмотку катушек (проиллюстрировано в гиф-файле).
Шаг 5: Что такое Н-мост (мостовая схема драйвера)
Н-мост – схема, состоящая из четырех переключателей, чаще используются простые транзисторы. Транзистор – полупроводниковый ключ – включается при прохождении тока через один из пинов. Использование одного транзистора даст возможность контролировать только скорость, тогда как Н-мост дает еще и возможность контролировать направление вращения. Это происходит за счет того, что выключение разных переключателей позволяет току течь в разных направлениях, меняя тем самым полярность. Переключатели 1, 2, 3 и 4 никогда не должны включаться вместе, это вызовет короткое замыкание и может повредить устройство.
Переключатели 1, 2, 3 и 4 никогда не должны включаться вместе, это вызовет короткое замыкание и может повредить устройство.
Н-мост не даст контроллеру перегореть при работе двигателя. Мотор создает сильное магнитное поле. Когда ток перестает поступать, энергия магнитного поля преобразуется в электрическую, это может повредить компоненты. Н-мост помогает защитить контроллер от повреждений. Никогда не подключайте двигатель напрямую к Arduino.
Н-мост легко собрать самим, а имеющиеся в продаже стоят недорого. В данном проекте используется Н-мост L293NE/SN754410.
Его распиновка:
- Пин 1 (1, 2EN) —> Мотор 1 Вкл/Выкл (HIGH/LOW)
- Пин 2 (1A) —> Мотор 1 Логический вывод1
- Пин 3 (1Y) —>Мотор 1 Штыревой вывод 1
- Пин 4 —>Земля
- Пин 5 —>Земля
- Пин 6 (2Y) —>Мотор 1 Штыревой вывод 2
- Пин 7 (2A) —> Мотор 1 Логический вывод 2
- Пин 8 (VCC2) —>Питание для двигателей
- Пин 9 —>Мотор 2 Вкл/Выкл (HIGH/LOW)
- Пин 10 —>Мотор 2 Логический вывод 1
- Пин 11 —>Мотор 2 Штыревой вывод 1
- Пин 12 —>Земля
- Пин 13 —>Земля
- Пин 14 —>Мотор 2 Штыревой вывод 2
- Пин 15 —>Мотор 2 Логический вывод 2
- Пин 16 (VCC1) —>Питание Н-моста (5 В)
Шаг 6: Подключение компонентов
4 штыревых вывода Н-моста должны подключаться к четырем выводам.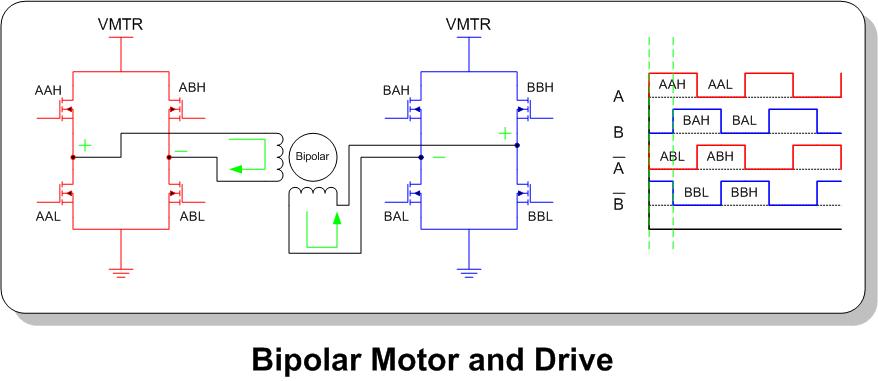 4 логических вывода подключаются к Arduino (в этой статье это 8, 9, 10 и 11 выводы). На схеме видно, что для питания можно использовать внешний источник питания. Н-мост работает при напряжении в диапазоне 4,5-36 В.
4 логических вывода подключаются к Arduino (в этой статье это 8, 9, 10 и 11 выводы). На схеме видно, что для питания можно использовать внешний источник питания. Н-мост работает при напряжении в диапазоне 4,5-36 В.
Шаг 7: Загрузка кода и тест
Загрузите код в Arduino. Если вы ошиблись при подключении, мотор вместо вращения начнет вибрировать. Попробуйте разные скорости и направления вращения, чтобы понять, что вам нужно.
1. Униполярные и биполярные шаговые двигатели
Руководство по двигателям серии
В чем разница между униполярными и биполярными шаговыми двигателями? Это в катушках.
Биполярные шаговые двигатели обычно способны создавать больший крутящий момент, чем униполярные шаговые двигатели, и более эффективны.
Однако ими сложнее управлять («эксплуатировать»). Основное различие между двумя типами шаговых двигателей заключается в способе изготовления проволочной обмотки.
Проволочная обмотка шагового двигателя
Вот упрощенное изображение проволочной обмотки двух типов шаговых двигателей.
Униполярный двигатель имеет центральный общий ответвитель на фазу. Биполярный двигатель — нет.
На схеме выше вы можете увидеть биполярный шаговый двигатель и униполярный шаговый двигатель с двумя фазами каждый.
Проволочная обмотка называется «фазой».
Униполярные шаговые двигатели имеют одну обмотку на фазу с центральным отводом. Это позволяет схеме управления управлять двигателем с током, который всегда течет в одном и том же направлении. Следовательно, нет необходимости генерировать обратный ток. Каждый раз, когда фаза активируется, только половина ее катушки находится под напряжением.
Биполярный шаговый двигатель также имеет одну обмотку на фазу. Однако центрального крана нет. Это означает, что при активации фазы вся катушка находится под напряжением. В результате биполярный двигатель способен создавать гораздо больший крутящий момент по сравнению с униполярным двигателем.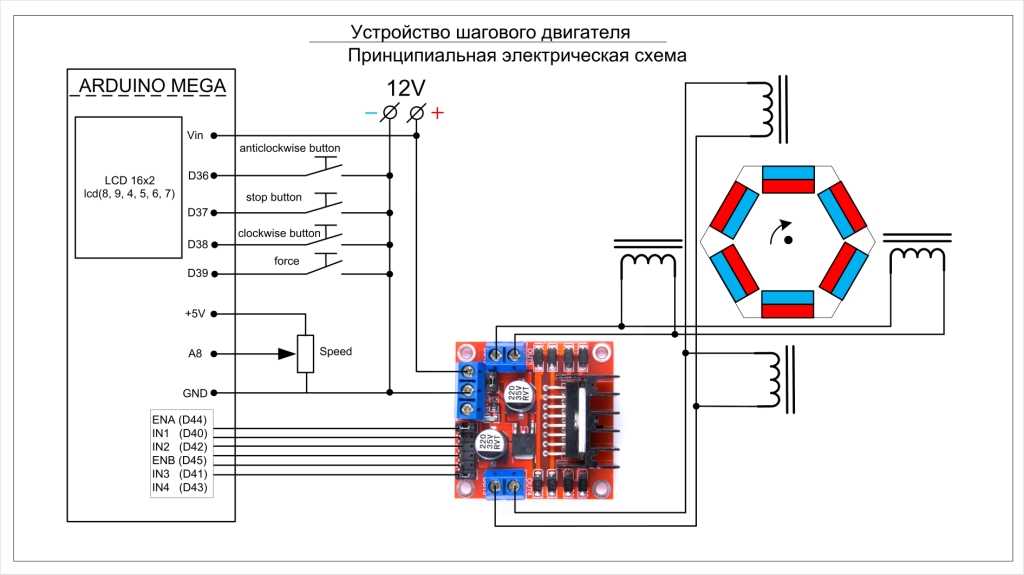 Но есть цена: схема управления должна быть способна генерировать ток, который может проходить через катушку в обоих направлениях, то есть «обычный» ток и «обратный» ток. В результате схема управления биполярным шаговым двигателем сложнее, чем у униполярного шагового двигателя.
Но есть цена: схема управления должна быть способна генерировать ток, который может проходить через катушку в обоих направлениях, то есть «обычный» ток и «обратный» ток. В результате схема управления биполярным шаговым двигателем сложнее, чем у униполярного шагового двигателя.
Биполярные двигатели имеют несколько (не менее двух) независимых обмоток. С каждого конца обмотки выходит провод, так что получается по два провода на обмотку.
Униполярные двигатели также могут иметь несколько (более двух) обмоток. Однако помимо того, что концы каждой обмотки соединены с проводами, середина присоединяется к третьему проводу.
Отсутствие этого третьего (общего) провода означает, что биполярные двигатели сделать немного проще.
Драйверы шаговых двигателей
Когда дело доходит до управления шаговыми двигателями, более простой биполярный двигатель требует более сложного драйвера; это потому, что для точного управления его движением нам нужно иметь возможность управлять током в каждой обмотке в обоих направлениях.
С другой стороны, в униполярном двигателе мы можем обойтись током, текущим только в одном направлении; это означает, что электронику драйвера можно упростить. Компромисс заключается в том, что мы используем только половину каждой катушки обмотки в данный момент времени, и это приводит к более низкому крутящему моменту и эффективности.
Однако сегодня, благодаря легкому доступу к драйверам двигателей, таким как Н-образные мосты, можно легко управлять биполярными двигателями переменного тока. Преимущество униполярных двигателей в отсутствии необходимости в обратном токе больше не имеет большого значения, поэтому можно получить все их эксплуатационные преимущества с минимальными затратами.
Драйверы шаговых двигателей
Чтобы управлять шаговым двигателем с помощью Arduino, вы можете рассмотреть эти драйверы (я включил несколько распространенных примеров):
- A4988 может управлять одним биполярным двигателем с током до 2 А на катушку.
- DRV8825 может управлять одним биполярным двигателем с током до 2,2 А на катушку.

- L298N, классический драйвер, может управлять одним биполярным двигателем с током до 2 А на катушку.
- TB6600 может управлять одним большим биполярным двигателем с током до 4,5 А на катушку.
- ULN2003, может управлять одним небольшим униполярным шаговым двигателем 5 В.
Узнать больше
Если вы хотите научиться использовать биполярные и униполярные шаговые двигатели (такие как NEMA17) с такими драйверами, как L298N, Easydriver или ULN2003, подумайте о регистрации в Arduino Step by Step Getting Serious.
Шаговые двигатели рассматриваются в специальном разделе (Раздел 18), который содержит 18 лекций.
Впервые на Arduino?
Arduino Step by Step Getting Started — наш самый популярный курс для начинающих.
Этот курс содержит высококачественное видео, мини-проекты и все необходимое для изучения Arduino с нуля. Мы поможем вам начать работу и на каждом этапе с помощью первоклассных инструкций и нашего супер-полезного пространства для обсуждения курса.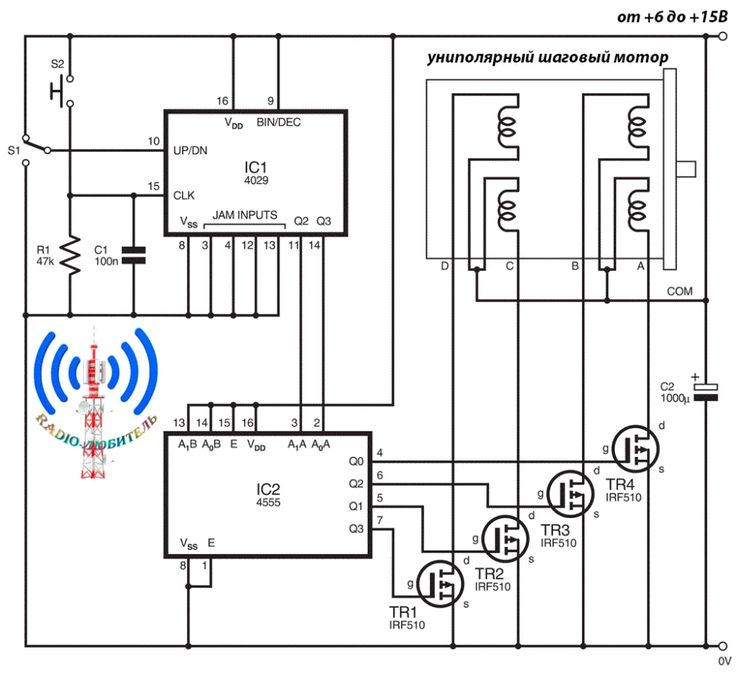
Узнать больше
Просмотрите эту статью
Обмотка шагового двигателя
Драйверы шагового двигателя
Драйверы шагового двигателя
Узнать больше
Перейти к другой статье
Изучили основы? Ищете более сложные темы?
Arduino Step by Step Getting Serious — это наш комплексный курс Arduino для тех, кто готов перейти на новый уровень.
Узнайте о Wi-Fi, BLE и радио, двигателях (серводвигателях, двигателях постоянного тока и шаговых двигателях с различными контроллерами), ЖК-дисплеях, OLED- и TFT-экранах с кнопками и сенсорными интерфейсами, управлении большими нагрузками, такими как реле и источники света, и о многом, НАМНОГО больше.
Узнать больше
Включите JavaScript, чтобы просматривать комментарии с помощью Disqus.
Шаговые двигатели и контроллеры
| Для получения информации о наших последних продуктах, экспериментах и распродажах свяжитесь с нами: |
ИС контроллера шагового двигателя
Морская пехота США-01
Микросхема шагового двигателя генерирует управляющие сигналы, которые можно использовать как для униполярных, так и для биполярных шаговых двигателей с соответствующими драйверами, такими как L298 и L293.
Особенности:
· Контроллер шагового двигателя общего назначения/для хобби.
· Совместимость с 4-фазными однополярными / 2-фазными биполярными двигателями.
· Режим Master/Slave — автономный свободный режим работы.
· 8 вариантов оборотов в свободном режиме.
· Совместимость с драйверами — L298, L293, дискретные транзисторы.
· Половина / полная волна: пошаговые режимы, управление направлением, включение.
· Сброс при включении питания инициализирует контроллер
Дополнительная информация
Спецификации: Инструкция по применению Waveform
USMC-01 — $9,95
ИС контроллера шагового двигателя
Вернуться к началу
Комплект USB-контроллера шагового двигателя
Этот комплект позволяет управлять однополярным шаговым двигателем из Windows (поставляется с шаговым двигателем на 12 В). Эксклюзивный интерфейс Windows предназначен для обучения основам управления шаговым двигателем. Автоматическое и ручное управление шаговым двигателем доступно через интерфейс Windows. Доступные элементы управления Windows: скорость, направление, полный шаг, полушаг и ручной шаг. Контроллер может управлять двигателями от 5 до 24 вольт.
Автоматическое и ручное управление шаговым двигателем доступно через интерфейс Windows. Доступные элементы управления Windows: скорость, направление, полный шаг, полушаг и ручной шаг. Контроллер может управлять двигателями от 5 до 24 вольт.
ST-USB-CTRL — 69 долл. США.95
Комплект контроллера шагового двигателя Windows USB
Вернуться к началу
Комплект контроллера униполярного шагового двигателя
Комплект контроллера шагового двигателя позволяет управлять униполярным шаговым двигателем. Интуитивно понятный интерфейс переключателя предназначен для обучения основам управления шаговым двигателем. Ручное управление шаговым двигателем доступно через интерфейс.
USMCK-UNI — $49,95
Комплект контроллера униполярного шагового двигателя
Вернуться к началу
Комплект контроллера биполярного шагового двигателя
Комплект контроллера шагового двигателя позволяет управлять биполярным шаговым двигателем. Интуитивно понятный интерфейс переключателя предназначен для обучения основам управления шаговым двигателем. Ручное управление шаговым двигателем доступно через интерфейс.
Интуитивно понятный интерфейс переключателя предназначен для обучения основам управления шаговым двигателем. Ручное управление шаговым двигателем доступно через интерфейс.
USMCK-BI — 49,95 долл. США
Комплект контроллера биполярного шагового двигателя
Вернуться к началу
Шаговый двигатель 12 В
Fuji Electrochemical Co. P/N ST-04 представляет собой униполярный двигатель с шагом 7,5 градусов (шесть проводов). Характеристики включают катушку 50/100 с/об, 12 В, 70 Ом. Эти новые двигатели имеют диаметр 1,65 дюйма (42 мм) и толщину 0,57 дюйма (14,5 мм). Вал имеет диаметр 0,12 дюйма (3 мм) и длину 0,39 дюйма (10 мм). Он имеет квадратный монтажный кронштейн 1,65 дюйма (42 мм) с отверстиями диаметром 4,01 дюйма (3,5 мм) на расстоянии 1,38 дюйма (35 мм) друг от друга. Шесть проводов длиной примерно 19 дюймов выходят из этого двигателя из двух расположенных рядом отверстий. одно отверстие имеет три провода, красный, коричневый и черный провод, а другое имеет 3 провода, красный, оранжевый и желтый.