Содержание
Управление бесколлекторным двигателем схема
Данная статья сфокусирована на применении микроконтроллера с минимальными ресурсами для управления вентильным двигателем и скорости его вращения. Как микроконтроллер может управлять трехфазным БДПТ двигателем? Для того, чтобы ответить на этот вопрос требуется, чтобы были определены ресурсы микросхемы, которые в данном приложении будут взаимодействовать с внешней топологией и функциями управления двигателя БДПТ. Существуют сенсорные и безсенсорные конфигурации двигателей для определения положения ротора , которые имеют свои за и против.
Поиск данных по Вашему запросу:
Управление бесколлекторным двигателем схема
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Бесколлекторный двигатель постоянного тока
- Блок управления бесколлекторным двигателем BLSD
- Контроллер трехфазного бесколлекторного двигателя постоянного тока с минимальными ресурсами
- Бесколлекторный электродвигатель — что это такое?
- Драйверы от TI: Управляй любым электродвигателем
- Драйверы от TI: Управляй любым электродвигателем
- Бесколлекторные двигатели со встроенным блоком управления FL42BLS-IE
- Что такое бесколлекторный двигатель постоянного тока и его принцип работы
- Управление бесколлекторными двигателями
- AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Мотор колесо & СИНУС. Пример для STM32
Пример для STM32
Бесколлекторный двигатель постоянного тока
Бесколлекторные моторы рис. При этом конструкция двигателя проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Поэтому они практически не изнашиваются.
Двигатели inrunner имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Двигатели outrunner имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами.
Коммутация в бесколлекторном двигателе БД осуществляется и контролируется с помощью электроники. Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору.
Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды. Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно. За переключением фаз следит микроконтроллер регулятора.
Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно. За переключением фаз следит микроконтроллер регулятора.
Функциональная схема ESC регулятора показана на рис. Схема подключения бесколлекторного двигателя с ESC-регулятором к плате Arduino показана на рис.
Для подключения регулятора к плате Arduino используется 2 провода:. Подключение бесколлекторного двигателя с ESC-регулятором к плате Arduino. Для управления регулятором будем использовать Arduino-библиотеку Servo. Минимальные и максимальные значения управляющего сигнала мксек и мксек. После загрузки скетча на плату Arduino видим что мотор не запускается и не реагирует на повороты потенциометра. Регулятор необходимо откалибровать, чтобы он знал минимальные и максимальное значения.
Для этого перед подачей питания на регулятор, выставляем потенциометр в максимальное значение. Подаем питание. Слышим «пиканье» двигателя. Переводим потенциометр в минимальное значение, слышим 3 «пика». Регулятор откалиброван. Теперь поворотом потенциометра можем регулировать скорость двигателя. В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino.
Регулятор откалиброван. Теперь поворотом потенциометра можем регулировать скорость двигателя. В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino.
Нам потребуются следующие компоненты:. Для калибровки в процедуре setup производим эмуляцию перевода потенциометра м максимальное и минимальное положение. Содержимое скетча показано в листинге 2. После запуска Arduino в процедуре setup происходит калибровка регулятора, и в процедуре loop мотор крутится со скоростью, соответствующей положению потенциометра. База знаний. Вконтакте Instagram YouTube. Бесколлекторные моторы. Обзор бесколлекторных двигателей, подключение и пример использования одного из них.
К сожалению, раздел пуст В данный момент нет активных товаров. Содержание Обзор Подключение к Arduino Пример использования Часто задаваемые вопросы Обзор бесколлекторных моторов для Arduino Бесколлекторные моторы рис.
ESC регуляторы Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для подключения регулятора к плате Arduino используется 2 провода: черный — «земля; белый — управляющий. Показания потенциометра будем использовать для управления скоростью мотора. Подключение бесколлекторного двигателя с ESC-регулятором к плате Arduino Для управления регулятором будем использовать Arduino-библиотеку Servo.
Для подключения регулятора к плате Arduino используется 2 провода: черный — «земля; белый — управляющий. Показания потенциометра будем использовать для управления скоростью мотора. Подключение бесколлекторного двигателя с ESC-регулятором к плате Arduino Для управления регулятором будем использовать Arduino-библиотеку Servo.
Содержимое скетча представлено в листинге 1. Листинг 1. Пример использования В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino. Листинг 2. Часто задаваемые вопросы 1. Проведите калибровку ESC-регулятора. Назад к списку Следующий проект. Услуги 3D печать Ремонт 3D принтеров. Блог 3D-печать 3D-принтеры.
Контакты Как до нас добраться.
Блок управления бесколлекторным двигателем BLSD
Преимущества бесколлекторных двигателей по сравнению с бензиновыми двигателями. Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока.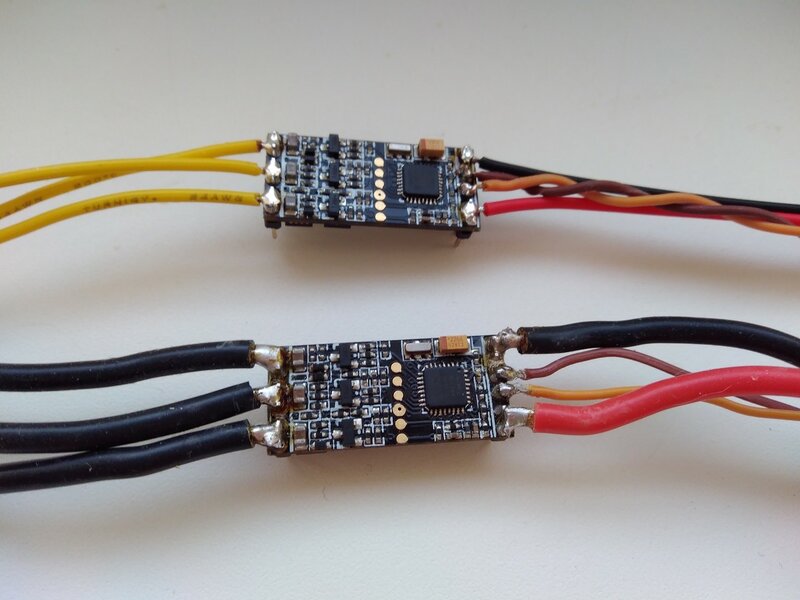 Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками.
Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками.
Примером бесколлекторного двигателя-маховика постоянного тока, Так как напряжения датчиков Холла пропорциональны возбуждающему их току управления то Конструктивная схема двигателя-маховика показана на рис.
Контроллер трехфазного бесколлекторного двигателя постоянного тока с минимальными ресурсами
Бесколлекторные моторы рис. При этом конструкция двигателя проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Поэтому они практически не изнашиваются. Двигатели inrunner имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Двигатели outrunner имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами.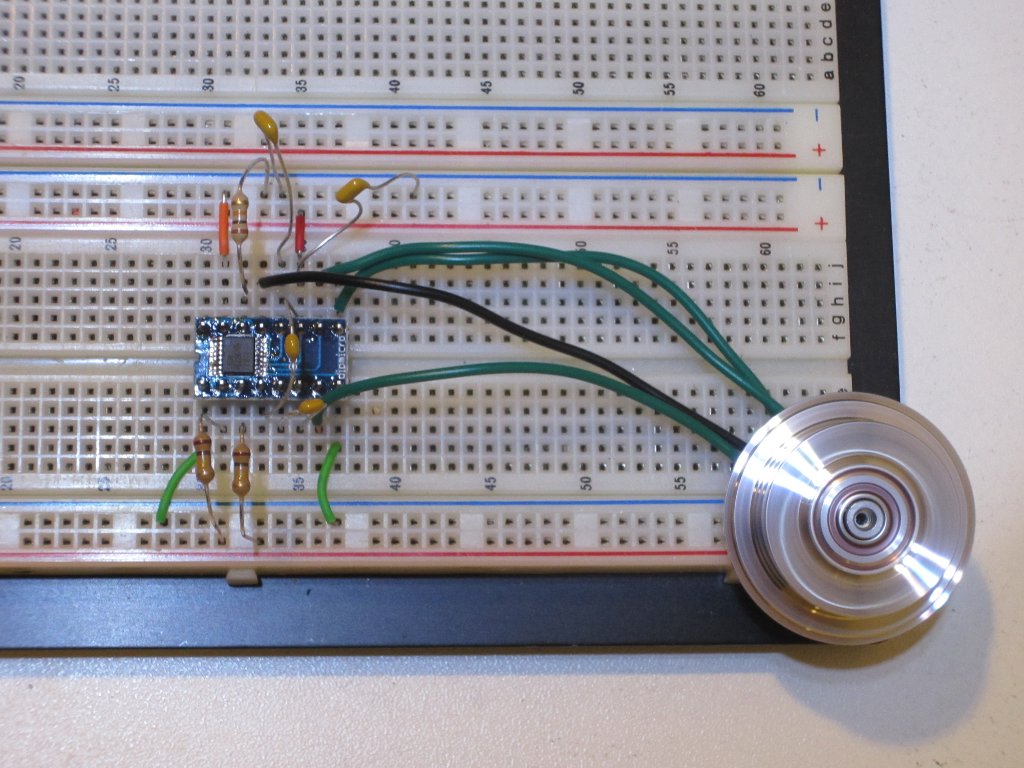 Коммутация в бесколлекторном двигателе БД осуществляется и контролируется с помощью электроники. Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды. Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно.
Коммутация в бесколлекторном двигателе БД осуществляется и контролируется с помощью электроники. Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды. Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно.
Бесколлекторный электродвигатель — что это такое?
Хочу им управлять с помощью ардуино. Но главное пока просто его запустить от розетки. У меня волосы дыбом встали когда я узнал что такое бесколлекторные надеюсь правильно написал двигатели и способы их управления. Это очень сложно, засим и прошу помощи. Думаю можно распаять заводскую схему управления кондиционером, но я не знаю вообще не шарю как.
На роторе бесколлекторного двигателя установлены постоянные магниты,.
Драйверы от TI: Управляй любым электродвигателем
Информацию о положении ротора электродвигателя можно передавать магнитным полем, используя для этого гальваномагнитные приборы, например магнитодиоды, или датчики Холла. Однако использование датчиков Холла приводит к усложнению конструкции электродвигателя, так как для формирования крутого фронта импульсов датчика положения датчики Холла должны быть расположены в специальном магнитопроводе с отдельным магнитом. Очень малкй к. Значительная зависимость параметров гальваномагнитных приборов от температуры резко уменьшает температурный диапазон работы электродвигателя. Тем не менее свойство датчиков Холла реагировать на знак и величину магнитного поля, на полярность питающего напряжения, а также практически неограниченное время работы определяют в некоторых случаях целесообразность их применения.
Однако использование датчиков Холла приводит к усложнению конструкции электродвигателя, так как для формирования крутого фронта импульсов датчика положения датчики Холла должны быть расположены в специальном магнитопроводе с отдельным магнитом. Очень малкй к. Значительная зависимость параметров гальваномагнитных приборов от температуры резко уменьшает температурный диапазон работы электродвигателя. Тем не менее свойство датчиков Холла реагировать на знак и величину магнитного поля, на полярность питающего напряжения, а также практически неограниченное время работы определяют в некоторых случаях целесообразность их применения.
Драйверы от TI: Управляй любым электродвигателем
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов — это далеко не полный перечень областей применения бесколлекторных двигателей БД постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.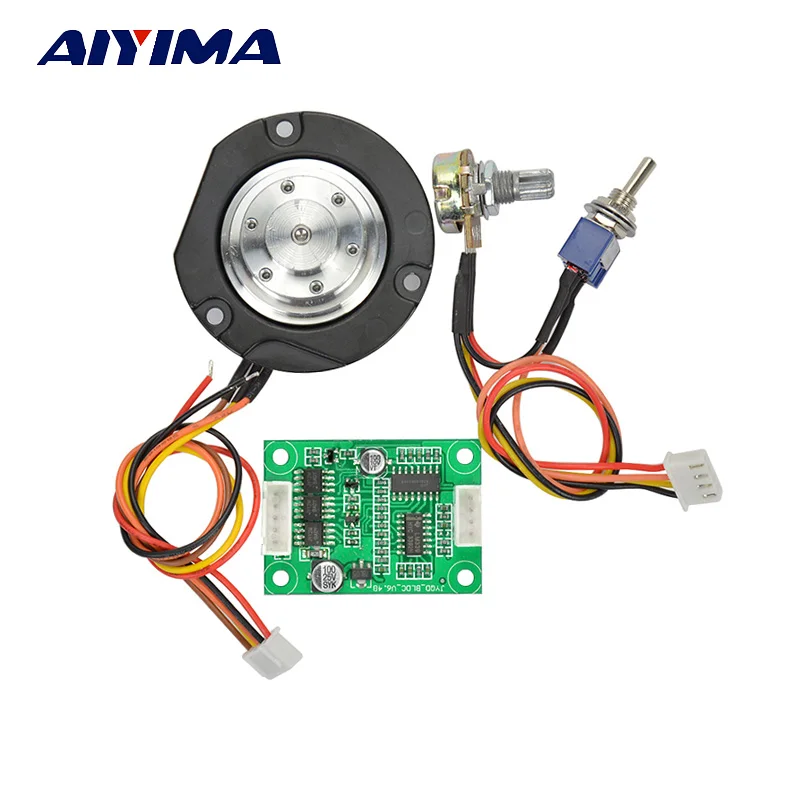 Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2. Как видите, конструкция представляет собой ротор якорь и статор, на первом имеется постоянный магнит или несколько магнитов, расположенных в определенном порядке , а второй оборудован катушками В для создания магнитного поля. Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем именно такой тип конструкции можно увидеть на рисунке 2 , так и внешним см. Соответственно, каждая из конструкций имеет определенную сферу применения.
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2. Как видите, конструкция представляет собой ротор якорь и статор, на первом имеется постоянный магнит или несколько магнитов, расположенных в определенном порядке , а второй оборудован катушками В для создания магнитного поля. Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем именно такой тип конструкции можно увидеть на рисунке 2 , так и внешним см. Соответственно, каждая из конструкций имеет определенную сферу применения.
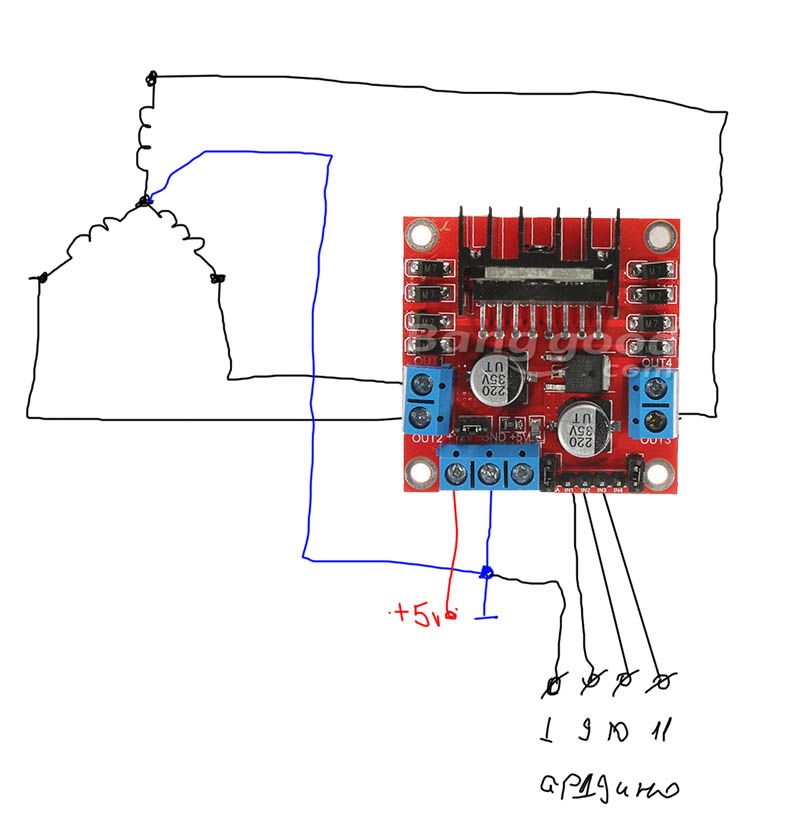
Brushless controller schematic mc Принципиальная Схема, Управление бесколлекторным двигателем постоянного тока(IR) Ардуино.
Бесколлекторные двигатели со встроенным блоком управления FL42BLS-IE
Управление бесколлекторным двигателем схема
Запросить склады. Перейти к новому. Управление бесколлекторным двигателем.
Что такое бесколлекторный двигатель постоянного тока и его принцип работы
ВИДЕО ПО ТЕМЕ: Бесколлекторный электродвигатель своими руками
Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора. Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока БДПТ эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера , за счет действия этой силы и образуется крутящий момент на валу электрических машин.
Двигателем постоянного тока называют электрический двигатель, питание которого обеспечивает постоянный ток. При необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами.
При необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами.
Управление бесколлекторными двигателями
Изобретение относится к бесколлекторным двигателям постоянного тока. Технический результат заключается в разработке схемы автоматического управления бесколлекторным двигателем, обеспечивающей режимы перестраиваемой стабилизированной скорости вращения двигателя и устойчивую его работу при запуске и колебаниях нагрузочного момента. Поставленная цель достигается тем, что в устройство автоматического управления двигателем, содержащее датчик положения ротора, регулятор длительности импульсов, электронный коммутатор и цепь обратной связи, в цепь обратной связи введены схема сравнения, формирователь напряжения установки, регулятор глубины обратной связи и интегратор, а выходы цепи обратной связи подсоединены к входам введенных в регулятор длительности импульсов компараторов, выходы которых через детекторы подключены к входам электронного коммутатора якорных обмоток двигателя. Изобретение относится к области средств автоматизации и робототехники и может быть использовано как в этих областях, так и в ряде других, где в качестве исполнительного элемента применяются управляемые бесколлекторные двигатели. Регистрация патентов.
Изобретение относится к области средств автоматизации и робототехники и может быть использовано как в этих областях, так и в ряде других, где в качестве исполнительного элемента применяются управляемые бесколлекторные двигатели. Регистрация патентов.
AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3
Высокопроизводительное AVR-ядро микроконтроллера, которое содержит контроллер силового каскада, позволяет реализовать устройство управления высокоскоростным бесколлекторным электродвигателем постоянного тока. В данном документе дается короткое описание принципа действия бесколлекторного электродвигателя постоянного тока, а в деталях рассматривается управление БКЭПТ в сенсорном режиме, а также приводится описание принципиальной схемы опорной разработки ATAVRMC , на которой основаны данные рекомендации по применению. Обсуждается также программная реализация с программно-реализованным контуром управления на основе ПИД-регулятора.
Датчики Холла для бесколлекторного двигателя: возвращение квадратурных энкодеров
Это уже третья статья, рассказывающая о квадратурных декодерах, на сей раз с применением к управлению бесколлекторными двигателями.
- Статья первая: принцип работы квадратурного декодера + код для ардуино.
- Статья вторая: квадратурный декодер на stm32.
Задача: есть обычный китайский бесколлекторник, нужно его подключить к контроллеру Copley Controls 503. В отличие от копеечных коптерных контроллеров, 503й хочет сигнал с датчиков холла, которых на движке нет. Давайте разбираться, для чего нужны датчики и как их ставить.
Ликбез: принцип работы бесколлекторного двигателя
В качестве иллюстрации я возьму очень распространённый двигатель с двенадцатью катушками в статоре и четырнадцатью магнитами в роторе. Вариантов намотки и количества катушек/магнитов довольно много, но суть всегда остаётся одной и той же. Вот фотография моего экземпляра с двух сторон, отлично видны и катушки, и магниты в роторе:
Чтобы было ещё понятнее, я нарисовал его схему, полюса магнитов ротора обозначены цветом: красный для северного и синий для южного:
На датчики холла пока не обращайте внимания, их всё равно нет 🙂
Что будет, если подать плюс на вывод V, а минус на вывод W (вывод U не подключаем ни к чему)? Очевидно, будет течь ток в катушках, намотанных зелёным проводом.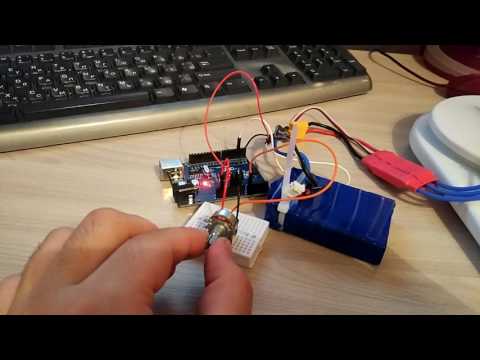 Катушки намотаны в разном направлении, поэтому верхние две катушки будут притягиваться к магнитам 1 и 2, а нижние две к магнитам 8 и 9. Остальные катушки и магниты в такой конфигурации роли практически не играют, поэтому я выделил именно магниты 1,2,8 и 9. При такой запитке мотора он очевидно крутиться не будет, и будет иметь семь устойчивых положений ротора, равномерно распределённых по всей окружности (левая верхняя зелёная катушка статора может притягивать магниты 1, 3, 5, 7, 9, 11, 13).
Катушки намотаны в разном направлении, поэтому верхние две катушки будут притягиваться к магнитам 1 и 2, а нижние две к магнитам 8 и 9. Остальные катушки и магниты в такой конфигурации роли практически не играют, поэтому я выделил именно магниты 1,2,8 и 9. При такой запитке мотора он очевидно крутиться не будет, и будет иметь семь устойчивых положений ротора, равномерно распределённых по всей окружности (левая верхняя зелёная катушка статора может притягивать магниты 1, 3, 5, 7, 9, 11, 13).
Давайте записывать наши действия вот в такую табличку:
| Угол поворота ротора | U | V | W |
| 0° | n.c. | + | — |
А что будет, если теперь подать плюс на U и минус на W? Красные катушки притянут к себе магниты 3,4,10 и 11, таким образом чуть-чуть повернув ротор (я по-прежнему выделяю магниты, за которые ротор тянет):
Давайте посчитаем, на сколько повернётся ротор: между щелями магнитов 1-2 и 3-4 у нас 51. 43° (=360°*2/7), а между соответствующими щелями в статоре 60° (=360°/12*2). Таким образом, ротор провернётся на 8.57°. Обновим нашу табличку:
43° (=360°*2/7), а между соответствующими щелями в статоре 60° (=360°/12*2). Таким образом, ротор провернётся на 8.57°. Обновим нашу табличку:
| Угол поворота ротора | U | V | W |
| 8.57° | + | n.c. | — |
Теперь сам бог велел подать + на U и — на V!
| Угол поворота ротора | U | V | W |
| 17.14° | + | — | n.c. |
Теперь опять пора выровнять магниты с зелёными катушками, поэтому подаём напряжение на них, но красный и синий магниты поменялись местами, поэтому теперь нужно подать обратное напряжение:
| Угол поворота ротора | U | V | W |
| 25.71° | n.c. | — | + |
C оставшимися двумя конфигурациями всё ровно так же:
| Угол поворота ротора | U | V | W |
34. 29° 29° | — | n.c. | + |
| Угол поворота ротора | U | V | W |
| 42.85° | — | + | n.c. |
Если мы снова повторим самый первый шаг, то наш ротор провернётся ровно на одну седьмую оборота. Итак, всего у нашего мотора три вывода, мы можем подать напряжение на два из них шестью разными способами 6 = 2*C23, причём мы их все уже перебрали. Если подавать напряжение не хаотично, а в строгом порядке, который зависит от положения ротора, то двигатель будет вращаться.
Запишем ещё раз всю последовательность для нашего двигателя:
| Угол поворота ротора | U | V | W |
| 0° | n.c. | + | — |
| 8.57° | + | n.c. | — |
| 17.14° | + | — | n.c. |
| 25.71° | n.c. | — | + |
34. 29° 29° | — | n.c. | + |
| 42.86° | — | + | n.c. |
Есть один нюанс: у обычного коллекторного двигателя за переключение обмоток отвечают щётки, а тут нам надо определять положение ротора самим.
Датчики Холла
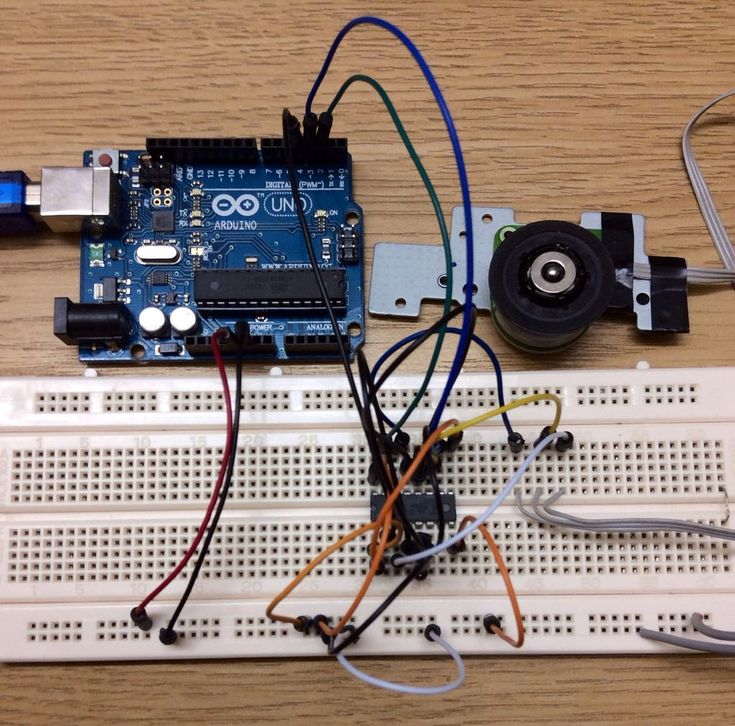
Теперь давайте поставим три датчика холла в те чёрные точки, обозначенные на схеме. Давайте договоримся, что датчик выдаёт логическую единицу, когда он находится напротив красного магнита. Всего существует шесть (сюрприз!) возможных состояний трёх датчиков: 23 — 2. Всего возможных состояний 8, но в силу расстояния между датчиками они не могут все втроём быть в логическом нуле или в логической единице:
Обратите внимание, что они генерируют три сигнала, сдвинутые друг относительно друга на 1/3 периода. Кстати, электрики используют слово градусы, говоря про 120°, чем окончательно запутывают нубов типа меня. Если мы хотим сделать свой контроллер двигателя, то достаточно читать сигнал с датчиков, и соответственно переключать напряжение на обмотках.
Для размещения датчиков я использовал вот такую платку, дизайн которой взял тут. По ссылке лежит проект eagle, так что я просто заказал у китайцев сразу много подобных платок:
Эти платки несут на себе только три датчика холла, больше ничего. Ну, по вкусу можно поставить конденсаторы, я не стал заморачиваться. Очень удобно сделаны длинные прорези для регулировки датчиков относительно статора.
Постойте, но ведь это очень похоже на квадратурный сигнал с обычного инкрементального энкодера!
Ещё бы! Единственная разница, что инкрементальные энкодеры дают два сигнала, сдвинутые друг относительно друга на 90°, а у нас три сигнала, сдвинутые на 120°. Что будет, если завести любые два из них на обычный квадратурный декодер, например, той же самой синей таблетки? Мы получим возможность определять положение вала с точностью до четырёх отсчётов на одну седьмую оборота, или 28 отсчётов на оборот. Если вы не поняли, о чём я, прочтите принцип работы квадратурного декодера в первой статье.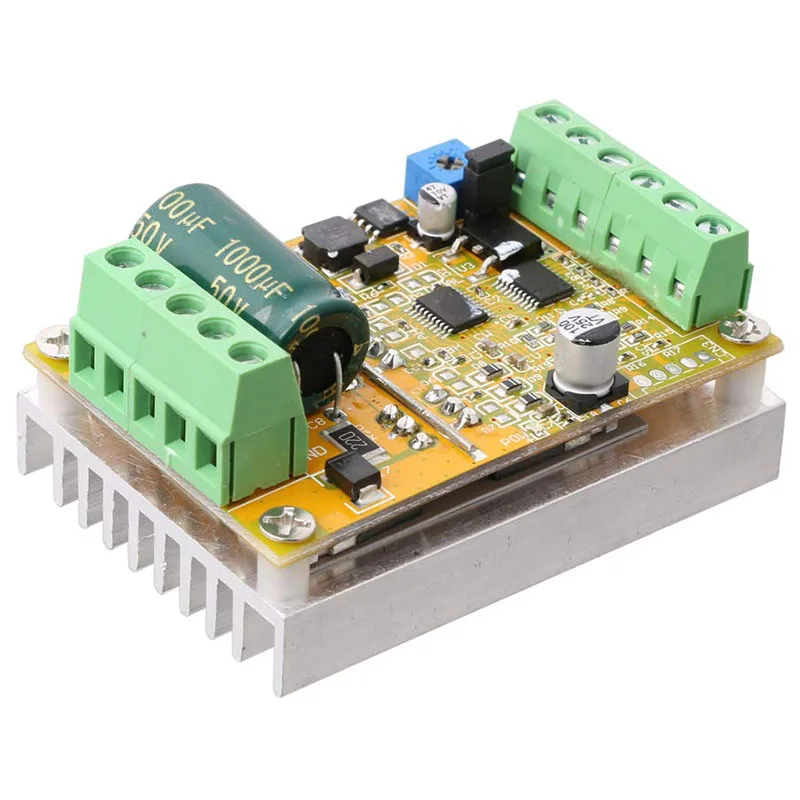
Я долго думал, как же мне использовать все три сигнала, ведь у нас происходит шесть событий на одну седьмую оборота, мы должны иметь возможность получить 42 отсчёта на оборот. В итоге решил пойти грубой силой, так как синяя таблетка имеет кучу аппаратных квадратурных декодеров, поэтому я решил в ней завести три счётчика:
Видно, что при каждом событии у нас увеличиваются два из них, поэтому сложив три счётчика, и поделив на два, мы получим равномерно тикающий определитель положения вала, с точностью до 6*7 = 42 отсчёта на оборот!
Вот так выглядит макет подключения датчиков Холла к синей таблетке:
А почему на двигателе сразу нет датчиков?
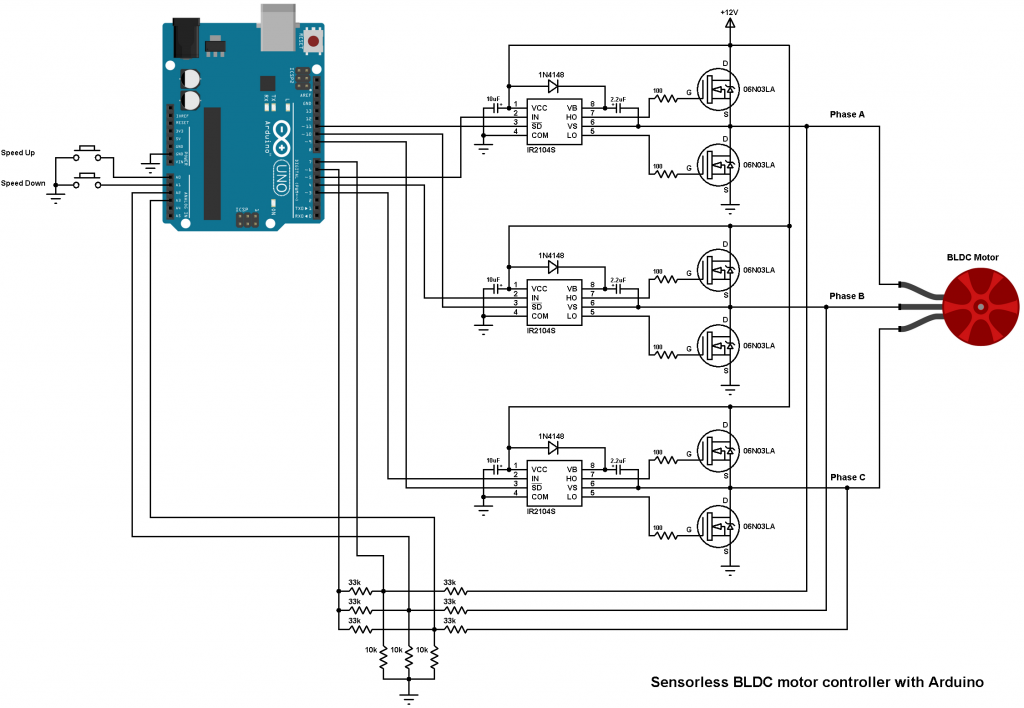
В некоторых приложениях (например, для коптеров) все эти заморочки не нужны. Контроллеры пытаются угадать происходящее с ротором по току в катушках. С одной стороны, это меньше заморочек, но сдругой стороны, иногда приводит к проблемам с моментом старта двигателя, поэтому слабоприменимо, например, в робототехнике, где нужны околонулевые скорости.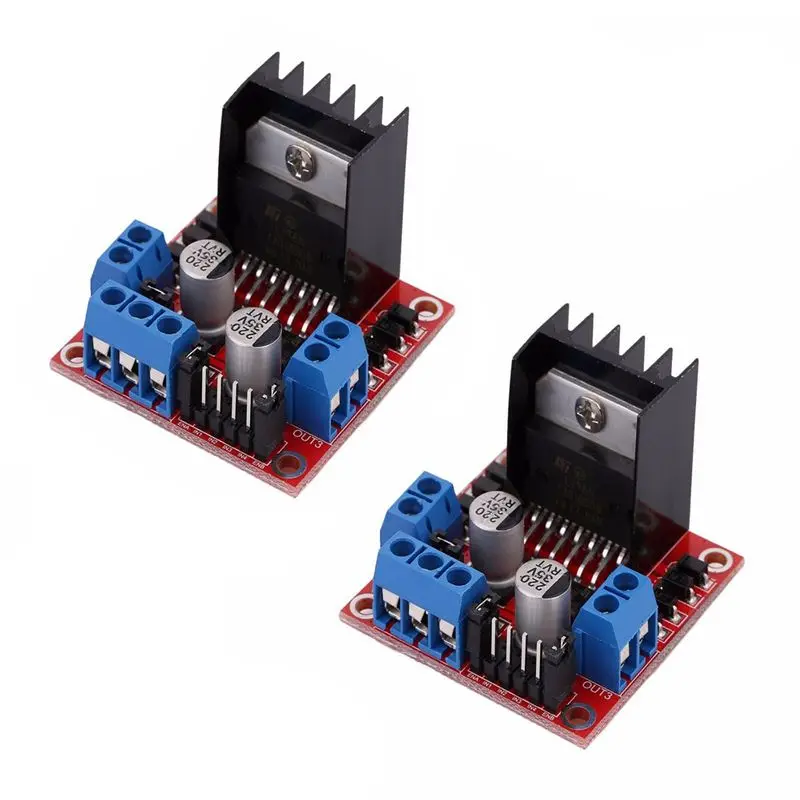 Давайте попробуем запитать наш движок от обычного китайского коптерного ESC (electronic speed controller).
Давайте попробуем запитать наш движок от обычного китайского коптерного ESC (electronic speed controller).
Мой контроллер хочет на вход PPM сигнал: это импульс с частотой 50Гц, длина импульса задаёт обороты: 1мс — останов, 2мс — максимально возможные обороты (считается как KV двигателя * напряжение).
Вот здесь я выложил исходный код и кубовские файлы для синей таблетки. Таймер 1 генерирует PWM для ESC, таймеры 2,3,4 считают соответствующие квадратурные сигналы. Поскольку в прошлой статье я крайне подробно расписал, где и что кликать, то здесь только даю ссылку на исходный код.
На вход моему ESC я даю пилообразное задание скорости, посмотрим, как он его отработает. Вывод синей таблетки лежит тут, а код, который рисует график, тут.
Поскольку у меня двигатель имеет номинал 400KV, а питание я подал 10В, то максимальные обороты должны быть в районе 4000 об/мин = 419 рад/с. Ну а вот и график подоспел:
Видно, что реальные обороты соответствуют заданию весьма приблизительно, что терпимо для коптеров, но совершенно неприменимо во многих других ситуациях, почему, собственно, я и хочу использовать более совершенные контроллеры, которым нужны сигналы с датчиков холла. Ну и бонусом я получаю абсолютный угол ротора, что бывает крайне полезно.
Ну и бонусом я получаю абсолютный угол ротора, что бывает крайне полезно.
Подводим итог
Я провёл детство в обнимку с этой книжкой, но раскурить принципы работы бесколлекторников довелось только сейчас.
Оказывается, что шаговые моторы и вот такое коптерные моторчики — это (концептуально) одно и то же. Разница лишь в количестве фаз: шаговики (обычно, бывают исключения) управляются двумя фазами, сдвинутыми на 90°, а бесколлекторники (опять же, обычно) тремя фазами, сдвинутыми на 120°.
Разумеется, есть и другие, чисто практические отличия: шаговики рассчитаны на увеличение удерживающего момента, в то время как коптерные движки на скорость плавность вращения, что сказывается на количестве обмоток, подшипниках и т.п. Но в итоге обычный бесколлекторник можно использовать в шаговом режиме, а шаговик в постоянном вращении, управление у них будет одинаковым.
Update: красивая анимация от Arastas:
Автор: haqreu
Источник
Управление бесколлекторным двигателем с помощью Arduino • AranaCorp
Теги: Arduino, Бесколлекторный двигатель, C/C++, Программирование
3. 7
7
(7)
Одной из основных задач робототехники является артикулирование объектов. Для этого очень распространено использование электродвигателей. В случае с летающими роботами, такими как дроны, приводы нуждаются в высокой скорости вращения, чтобы пропеллеры вращались и позволяли летать. В этом случае часто используются бесколлекторные двигатели. Особенность бесщеточного (бесколлекторного) двигателя в том, что он может достигать очень высоких скоростей по сравнению с другими типами двигателей с меньшим крутящим моментом, разумеется.
Оборудование
- Компьютер
- Arduino UNO
- USB-кабель Штекер A к штекеру B
- Бесколлекторный+ESC
Принцип работы
Бесколлекторные двигатели называются трехфазными двигателями с тремя обмотками. Это означает, что он генерирует непрерывное вращение, когда токи на этих обмотках смещаются. Генерация профилей тока на каждой катушке для получения желаемой скорости требует использования регулятора скорости (называемого ESC, электронный регулятор скорости) для преобразования команды ШИМ в скорость вращения.
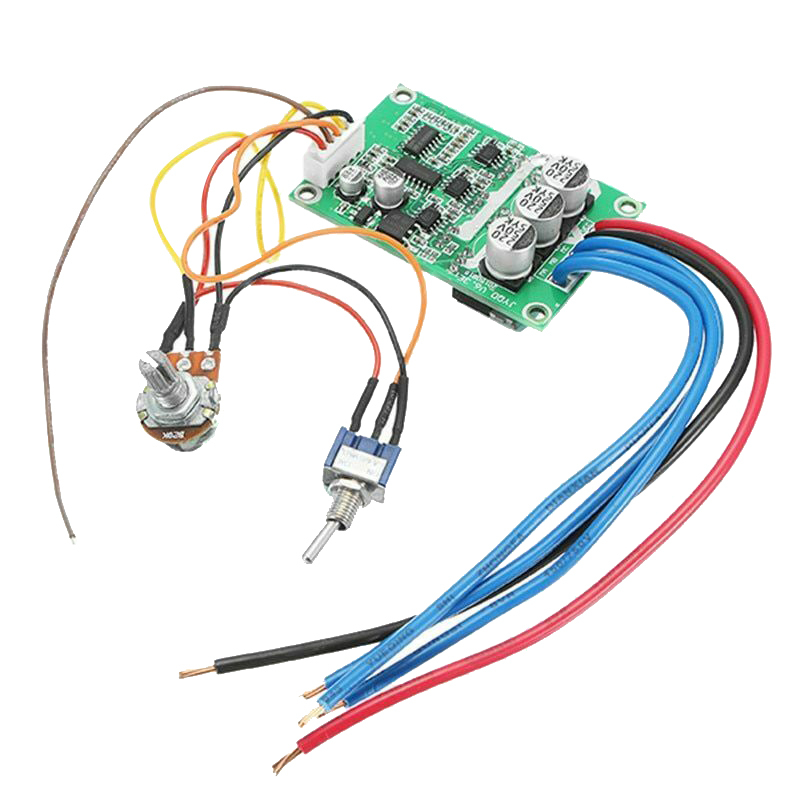
Схема
Для правильной работы двигателя требуется большой ток, поэтому ESC будет питаться от источника питания, внешнего по отношению к микроконтроллеру. Регулятор ESC подключается к разъему ШИМ на микроконтроллере.
Код
Каждый раз, когда код запускается, ESC должен следовать определенной процедуре для правильной инициализации. Эта процедура описана в функции initProcedure() и состоит из последовательности ШИМ-команд в течение определенного времени (соответствующего сигналам от пультов радиоуправления).
//Параметры
const int escPin = 3;
интервал мин_дроссель = 1000;
интервал max_throttle = 2000;
unsigned long currentMillis, previousMillis;
недействительная установка () {
//Инициализация последовательного USB
Серийный номер .begin(9600);
Серийный номер .println(F("Инициализировать систему"));
//Инициализируем ESC
pinMode(escPin, ВЫХОД);
процедура инициализации();
}
недействительный цикл () {
запустить бесщеточный();
}
void runBrushless() { /* функция runBrushless */
//// Проверка бесколлекторной процедуры
Серийный номер . println("работает");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды(1350);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
Серийный номер .println("стоп");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
}
void initProcedure() { /* функция initProcedure */
//// Процесс инициализации ESC
предыдущийMillis = миллис();
Серийный номер .println("Дроссель вверх");
в то время как (currentMillis < 3000) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержка в микросекундах (max_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} //бип-бип-
текущий Миллис = 0;
предыдущийMillis = миллис();
Серийный номер . println("уменьшить дроссельную заслонку");
в то время как (currentMillis < 4500) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} // звуковой сигнал--
// 1 2 3
}
println("работает");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды(1350);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
Серийный номер .println("стоп");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
}
void initProcedure() { /* функция initProcedure */
//// Процесс инициализации ESC
предыдущийMillis = миллис();
Серийный номер .println("Дроссель вверх");
в то время как (currentMillis < 3000) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержка в микросекундах (max_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} //бип-бип-
текущий Миллис = 0;
предыдущийMillis = миллис();
Серийный номер . println("уменьшить дроссельную заслонку");
в то время как (currentMillis < 4500) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} // звуковой сигнал--
// 1 2 3
}
 println("работает");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды(1350);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
Серийный номер .println("стоп");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
}
void initProcedure() { /* функция initProcedure */
//// Процесс инициализации ESC
предыдущийMillis = миллис();
Серийный номер .println("Дроссель вверх");
в то время как (currentMillis < 3000) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержка в микросекундах (max_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} //бип-бип-
текущий Миллис = 0;
предыдущийMillis = миллис();
Серийный номер .
println("работает");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды(1350);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
Серийный номер .println("стоп");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
}
void initProcedure() { /* функция initProcedure */
//// Процесс инициализации ESC
предыдущийMillis = миллис();
Серийный номер .println("Дроссель вверх");
в то время как (currentMillis < 3000) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержка в микросекундах (max_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} //бип-бип-
текущий Миллис = 0;
предыдущийMillis = миллис();
Серийный номер .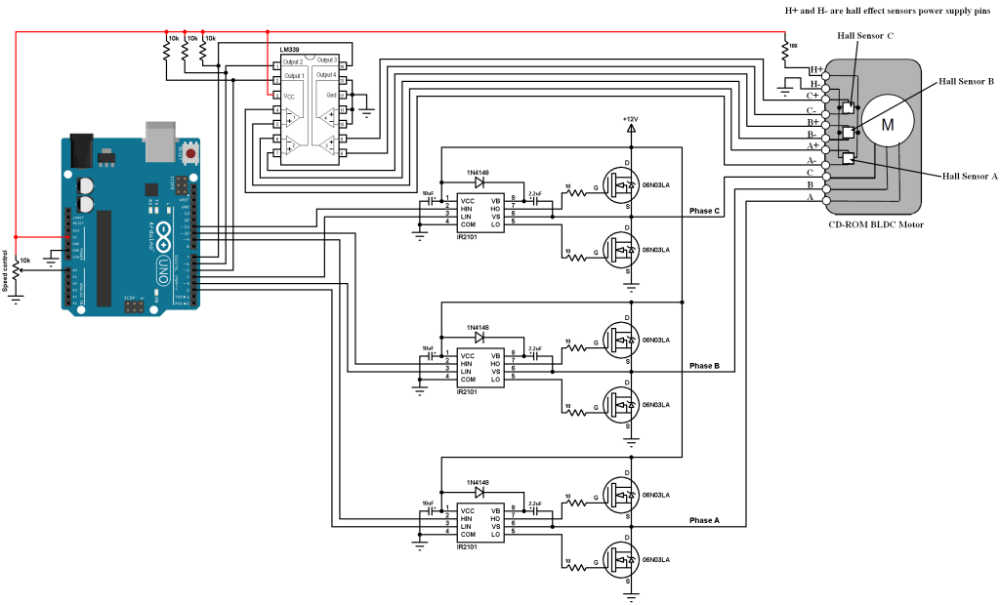 println("уменьшить дроссельную заслонку");
в то время как (currentMillis < 4500) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} // звуковой сигнал--
// 1 2 3
}
println("уменьшить дроссельную заслонку");
в то время как (currentMillis < 4500) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} // звуковой сигнал--
// 1 2 3
}
Результат
Когда вы включаете карту Arduino и запускаете код, вы должны услышать, как ESC издает звуки, информирующие вас о ходе инициализации (два коротких и один длинный сигнал). После этого вы должны увидеть работающий двигатель.
Приложения
- Сборка дрона
- Приведение в движение лодки с дистанционным управлением
Найдите другие примеры и руководства в нашем Автоматическом генераторе кодов
Code Architect
Насколько полезен был этот пост?
Нажмите на звездочку, чтобы оценить!
Средняя оценка 3.7 / 5. Всего голосов: 7
Голосов пока нет! Будьте первым, кто оценит этот пост.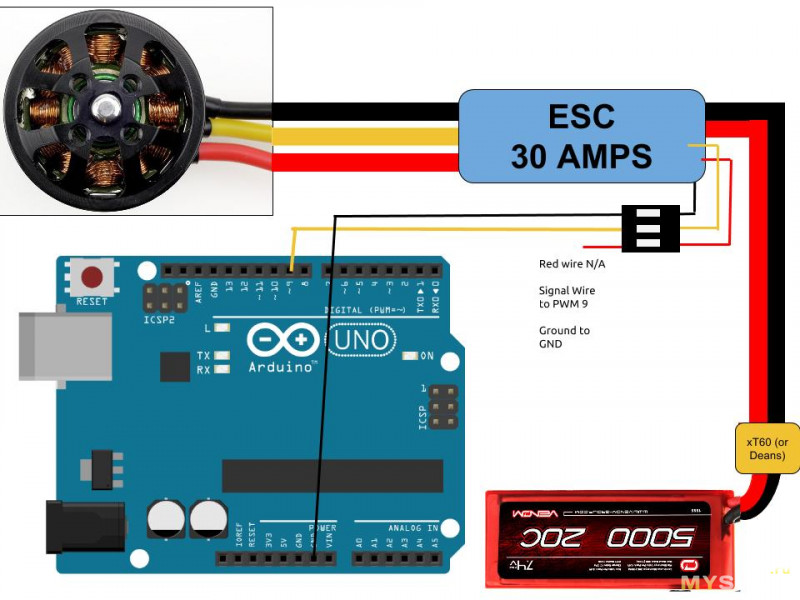
Сожалеем, что этот пост не был вам полезен!
Давайте улучшим этот пост!
Расскажите, как мы можем улучшить этот пост?
Управление положением бесщеточного двигателя с помощью Arduino и SOLO [+ Код Arduino]
В этой статье мы собираемся управлять положением бесщеточного синхронного двигателя постоянного тока или постоянного магнита с помощью SOLO с Arduino, а точнее с помощью Arduino библиотека SOLO Другими словами, мы превращаем SOLO в точный сервопривод для взаимодействия и управления бесщеточным двигателем с помощью инкрементных квадратурных энкодеров. В этой статье связь между SOLO и Arduino осуществляется через UART путем отправки пакетов данных.
Этот тип управления может быть интересен для точных систем, таких как станки с ЧПУ, 3D-принтеры, роботы и т. д., где важно точное положение ротора двигателя, с SOLO благодаря Field Oriented Control вы можете одновременно убедиться, что все такие параметры, как Крутящий момент, Скорость и Положение, отслеживаются и контролируются, поэтому во время отслеживания траектории в случае возникновения нарушений нагрузки вы можете быть уверены, что они не повлияют на качество управления положением.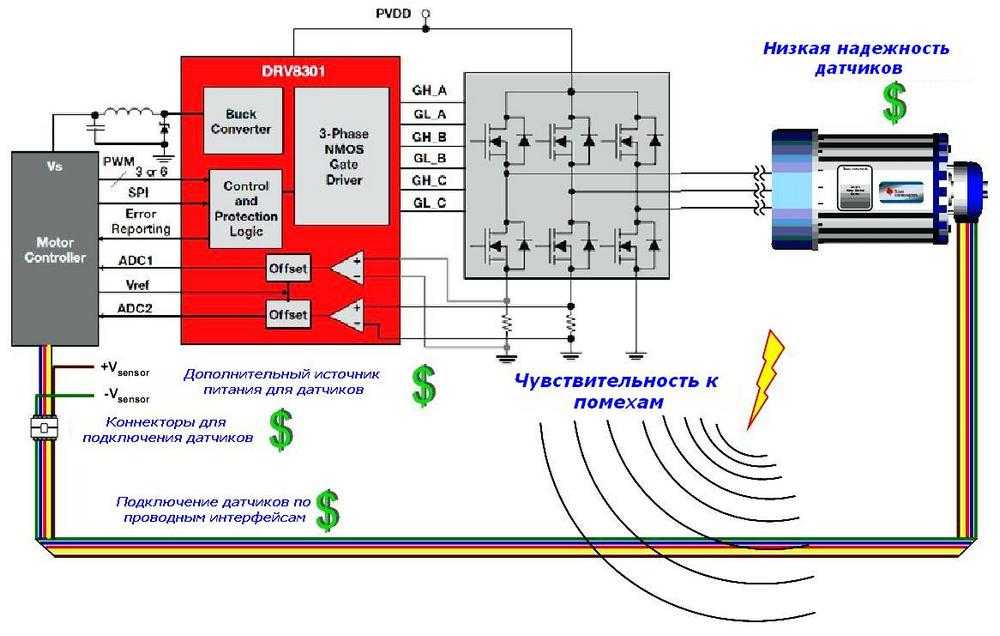
Говоря простым языком, чтобы добиться управления положением с SOLO, вам необходимо иметь дело с 3 контурами управления, которые участвуют в этой архитектуре, и каждый из них имеет свою собственную часть, говоря простым языком:
1 Контур крутящего момента : Это является ближайшим контроллером к двигателю и самым быстрым, он будет контролировать только крутящий момент двигателя независимо от скорости. Скорость зависит от того, насколько велика нагрузка на вал двигателя, поэтому разница между крутящим моментом двигателя и Крутящий момент нагрузки определяет конечную скорость ротора двигателя.
2 Контур скорости : Контур скорости идет за контуром крутящего момента, он медленнее, чем контроллер крутящего момента (по крайней мере, примерно в 10 раз) и в основном пытается зафиксировать скорость на желаемом значении, этот контроллер будет поддерживать скорость фиксируется независимо от изменения нагрузки и соответствующим образом регулирует крутящий момент.