Содержание
Система управления асинхронным тиристорным электроприводом
1. Постановка задачи.
Системы «Тиристорный преобразователь напряжения — асинхронный двигатель» («ТПН-АД») широко используются при построении устройств плавного пуска АД. Существующие устройства плавного пуска, как правило, обеспечивают формирование заданной диаграммы напряжения, ограничение тока или электромагнитного момента [1] двигателя.
При выполнении научно-исследовательской работы, проводимой на кафедре «Электропривод и автоматизация промышленных установок» УГТУ-УПИ, возникла необходимость анализа свойств системы ТПН-АД, имеющей в своём составе контур электромагнитного момента.
В работе рассматриваются вопросы построения системы автоматического регулирования (САР) электромагнитного момента асинхронного двигателя без датчика на его валу, питаемого от ТПН.
2. Описание решения.
Для реализации САР электромагнитного момента двигателя на базе системы ТПН-АД требуется наличие сигнала обратной связи по моменту. Установка датчика момента на валу двигателя, как правило, невозможна из-за повышенной сложности его конструкции. Поэтому возникает задача косвенной оценки момента АД на основе измерения электрических переменных двигателя (напряжение, ток).
Установка датчика момента на валу двигателя, как правило, невозможна из-за повышенной сложности его конструкции. Поэтому возникает задача косвенной оценки момента АД на основе измерения электрических переменных двигателя (напряжение, ток).
Оценка мгновенного значения электромагнитного момента АД может быть получена при использовании следующего выражения:
где т — мгновенное значение электромагнитного момента двигателя; k = 1/ ωs — масштабный коэффициент, определяемый как величина, обратная угловой частоте напряжения на статоре ωs; Ps— активная мощность, потребляемая двигателем, которая может быть определена по выражению
где usa, usb, usc, isa, isb, isc— мгновенные значения напряжений и токов фаз А, В и С статора соответственно; ∆PS — мощность потерь в меди статора, вычисляемая по формуле
где Rs— активное сопротивление фазы обмотки статора.
Структура САР электромагнитного момента приведена на рис. 1. На рис. 1 изображены следующие элементы: РМ — регулятор момента интегрального типа; ФБ — функциональный блок, необходимый по условиям линеаризации и выполняющий операцию извлечения квадратного корня; СИФУ -система импульсно-фазового управления; ВМ — вычислитель момента.
Рис 1. Структура САР электромагнитного момента АД
Описанная система выполнена в виде стенда [2], структура которого показана на рис. 2. Стенд состоит из короткозамкнутого асинхронного двигателя, тиристорного преобразователя напряжения, датчиков мгновенных значений тока is(ДТ) и напряжения us (ДН) и персонального компьютера (ПК), оснащенного платой сбора данных Nl PCI-6221 с системой LabVIEW.
Рис. 2. Структура исследовательского стенда
При практической реализации САР момента нет необходимости в выдаче управляющего преобразователем сигнала на выбранном такте работы АЦП (т.е. каждые 0,0001 с) поэтому вместо выражений (2) и (3) использованы следующие алгоритмы:
расчёт которых проводится на периоде сети, равном 0,02 с. Стенд позволяет реализовать практически любые типы САР системы ТПН-АД путём модификации его программного обеспечения.
Стенд позволяет реализовать практически любые типы САР системы ТПН-АД путём модификации его программного обеспечения.
Особенностью ПО стенда является то, что часть программы, отвечающая за обработку сигналов, выполнена в виде функций динамически подключаемой библиотеки (DLL), созданной в системе программирования Delphi. В функциях библиотеки реализованы следующие задачи: определение электромагнитного момента двигателя по выражениям (1), (4) и (5), расчет регулятора момента и функционального блока.
Средствами LabVIEW выполнен опрос датчиков, выдача управляющих воздействий, отображение временных диаграмм всех сигналов (от датчиков и вычисленных программой) и формирование заданного значения момента двигателя. Код программы системы управления электроприводом показан на рис. 3.
Рис. 3. Программа системы управления, реализованная в LabVIEW
Информация от датчиков тока и напряжения передается в узел вызова основной функции библиотеки в виде указателей на массивы, содержащие значения соответствующих сигналов, при этом рабочая частота АЦП и размер буферов выбраны таким образом, что массивы содержат значения сигналов на одном периоде сети (0,02 с). На рис. 4. показано диалоговое окно параметрирования узла вызова основной функции библиотеки, производящей все расчёты и формирующей сигнал управления преобразователем.
На рис. 4. показано диалоговое окно параметрирования узла вызова основной функции библиотеки, производящей все расчёты и формирующей сигнал управления преобразователем.
Рис. 4. Параметры узла вызова основной функции библиотеки
Функции библиотеки рассчитываются на частоте 50 Гц, сигналы датчиков тока и напряжения оцифровываются на частоте 10 кГц.
Диаграммы пуска электропривода с контуром электромагнитного момента представлены на рис. 5, 6.
Рис. 5. Пуск привода с контуром момента на холостом ходу: 1 — скорость, 2 — электромагнитный момент АД
Рис. 6. Пуск привода с контуром момента при моменте сопротивления на валу Мс = 0,4 Мм: 1 — скорость, 2 — электромагнитный момент АД
Из приведённых диаграмм видно, что темп запуска привода сильно зависит от момента сопротивления на валу двигателя, а поддержание электромагнитного момента двигателя на заданном уровне обеспечивает плавный и безударный пуск двигателя, не гарантируя при этом постоянства темпа его разгона.
Список литературы:
1. Chouffier J., Cornilleau H., Duclos P. Control method for a start-up control unit and an apparatus to make use of this method // United States patent № 5859514, 01.12.1999.
2. Зюзев А. М., Нестеров К.Е. Стенд для исследования системы управления асинхронным тиристорным электроприводом на основе программно-аппаратных средств Natonal Instruments // Материалы пятой международной НПК «Образовательные, научные и инженерные технологийй в среде LabVIEW и технологии National Instruments». Москва: РУДН, 2006. С. 395-399.
Тиристорный электропривод переменного тока, включенный в статорную часть асинхронного двигателя
Боихонов Заилобиддин Уразали оглы1, Узаков Рахмонжон1
1Андижанский машиностроительный институт
Аннотация
В основном в этой статье тиристорно-управляемое устройство включается в статорную часть асинхронного двигателя, с помощью изменения напряжения, изменения сопротивления индукционного реостата и изменения емкости конденсатора изменяется механическая характеристика асинхронного двигателя с фазным ротором.
Ключевые слова: асинхронные электродвигатели постоянного тока, магнитный поток, напряжение, реостат, тиристор
Библиографическая ссылка на статью:
Боихонов З.У.о., Узаков Р. Тиристорный электропривод переменного тока, включенный в статорную часть асинхронного двигателя // Современные научные исследования и инновации. 2020. № 5 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2020/05/92669 (дата обращения: 07.10.2022).
Основной задачей современного производства является обеспечение роста научно-технического прогресса. Основным условием его выполнения непрерывное усовершенствование технологий, систем и средств управления технологического оборудования и технологического процесса.
Известно, в наши дни микроэлектроника являясь основным фактором научно-технического роста, гарантирует экономического подъёма общества.
В наши дни все существующие направления технического развития в текстильной и легкой промышленности, основанные на применении современных микропроцессоров и средств автоматики направлены на улучшение эффективности труда и качества продукции.
Необходимо подчеркнуть, что оборудование агрегатов машин и механизмов, входящих в состав производственной системы текстильных и прядильных фабрик современными средствами управления и регулирования полностью отвечает современным требованиям.
Для этой цели вместо двигателя постоянного тока устанавливается простой по конструкции, дешевый по себестоимости, расход дефицитных металлов 1,5 ÷ 2 раза меньше (в сравнении с двигателем постоянного тока), с простой системой управления асинхронный электродвигатель переменного тока, работающий надёжно и достаточно удовлетворяющий рабочих характеристик. Асинхронные электродвигатели широко применяются во многих отраслях производства. Скорость вращения асинхронного двигателя регулируется просто, управляется индукционным реостатом новой конструкции.
По приведенной формуле асинхронного двигателя с фазным ротором его механическая характеристика выражается в различных значениях.
Здесь общее сопротивление находится по следующему выражению
Тиристорно управляемое устройство включается в статорную часть асинхронного двигателя, с помощью изменения напряжения, изменения сопротивления индукционного реостата и изменения емкости конденсатора изменяется механическая характеристика асинхронного двигателя с фазным ротором.
Скорость вращения асинхронного двигателя регулируется простым индукционным реостатом новой конструкции.
Для изменения скорости вращения двигателя изменяется образуемый магнитный поток в намагничивающей обмотке, т.е. появляется магнитный поток, связанный подаваемой силой тока на эту обмотку.
Этот магнитный поток, по направлению противоположен магнитному потоку, создаваемому обмоткой высокой мощности и алгебраически вычитается. В результате связанный значению направленного магнитного потока активное и реактивное сопротивления индукционного реостата. Это изменение в свою очередь приводит к изменению скорости вращения двигателя. Если коэффициент скольжения равняется S=1, то количество электрических параметров энергии, потребляемой индукционным реостатом равняется нулю. Изменением активно-индуктивного сопротивления индукционного реостата и сохранением некоторого сопротивления производится изменением значения напряжения, подаваемого на обмотку статора и увеличения (или уменьшения) количества конденсаторов.
Кроме этого принцип работы электропривода с асинхронным двигателем и с индукционным реостатом основан на количестве вращения и производится за счёт изменения сопротивления индукционного реостата. В результате ограничения тока ротора приводит к изменению скорости вращения двигателя. Регулирование скорости электропривода дает возможность повышения производительность шлихтовальной машины.
В частотно-управляемом асинхронном электроприводе на основании изменение частоты переменного тока на обмотке статора регулируется скорость вращения электродвигателя. В конце концов составляется система управления электродвигателем, приводящий энергосбережению.
Сведения, полученные результатами научных исследований показывают, что использование тиристорного электропривода переменного тока дает возможность уменьшению дерганий в электродвигателях и возможность мягкого пуска.
Библиографический список
- М. П. Белов, В. А.
 Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г.
Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г. - Абрамов А.Г. Размерный ряд индукционных автоматических реостатов для электродвигателей с фазным ротором. Электричество №12 сраница 46-49 1965 год
- Шмелев А.Н. Шишло К.С. Электрооборудование промишленных предприятий текстильного производства М. Легкая индустрия. 1975 год
- Башарин А.Б, Новиков В.А., Соколовский Г.Г. Управление электроприводами Л. Энергия 1982 гор
 Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г.
Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г.Количество просмотров публикации: Please wait
Все статьи автора «Режабов Зайлобиддин Маматович»
Устройство управления асинхронным двигателем и двигателями постоянного тока
Полезная модель относится к системам промышленной автоматики и может быть использована для управления, как асинхронным двигателем, так и двигателями постоянного тока. Указанный технический результат достигают за счет того, что устройство управления асинхронным двигателем и двигателями постоянного тока содержит источник питания, к которому подключен интеллектуальный транзисторный модуль, связанный с устройством управления, асинхронный двигатель. К интеллектуальному транзисторному модулю и устройству управления подключено реле, связанное с асинхронным двигателем и одним выводом обмоток якорей от одного до трех двигателей постоянного тока, обмотки возбуждения которых параллельно подключены к источнику питания. К устройству управления и к источнику питания подключен блок реле, к которому подсоединены вторым выводом обмотки якорей двигателей постоянного тока. 1 ил.
К интеллектуальному транзисторному модулю и устройству управления подключено реле, связанное с асинхронным двигателем и одним выводом обмоток якорей от одного до трех двигателей постоянного тока, обмотки возбуждения которых параллельно подключены к источнику питания. К устройству управления и к источнику питания подключен блок реле, к которому подсоединены вторым выводом обмотки якорей двигателей постоянного тока. 1 ил.
Полезная модель относится к системам промышленной автоматики и может быть использована для управления, как асинхронным двигателем, так и двигателями постоянного тока.
Известно устройство управления двигателем постоянного тока [свидетельство на полезную модель РФ 37283, МПК Н02Р 5/175, опубл. 10.04.2004], содержащее вход для подключения источника обратной связи, датчик тока, сетевой трансформатор, первичная обмотка которого подключена к сетевому напряжению, управляемый выпрямитель, содержащий два полупроводниковых вентиля, два диода и две помехозащитные цепи. Фаза сетевого напряжения подключена к катоду первого полупроводникового вентиля и аноду первого диода, ноль сетевого напряжения подключен к катоду второго полупроводникового вентиля и аноду второго диода. Аноды первого и второго полупроводниковых вентилей подключены к первому входу датчика тока. Катоды первого и второго диодов подключены к первому выходу тиристорного преобразователя, второй выход которого соединен со вторым входом датчика тока. Две защитные цепи включенны параллельно цепям сетевого напряжения и выходам тиристорного преобразователя. В управляемом выпрямителе в качестве двух полупроводниковых вентилей выбраны оптотиристоры. Входы управления первого и второго оптотиристоров подключены, соответственно, к выходам первого и второго усилителей мощности. Вторичная обмотка сетевого трансформатора подключена к первому входу узла суммирования. Второй вход узла суммирования связан с источником постоянного напряжения смещения, а его выход подключен к соответствующему входу первого микроконтроллера.
Фаза сетевого напряжения подключена к катоду первого полупроводникового вентиля и аноду первого диода, ноль сетевого напряжения подключен к катоду второго полупроводникового вентиля и аноду второго диода. Аноды первого и второго полупроводниковых вентилей подключены к первому входу датчика тока. Катоды первого и второго диодов подключены к первому выходу тиристорного преобразователя, второй выход которого соединен со вторым входом датчика тока. Две защитные цепи включенны параллельно цепям сетевого напряжения и выходам тиристорного преобразователя. В управляемом выпрямителе в качестве двух полупроводниковых вентилей выбраны оптотиристоры. Входы управления первого и второго оптотиристоров подключены, соответственно, к выходам первого и второго усилителей мощности. Вторичная обмотка сетевого трансформатора подключена к первому входу узла суммирования. Второй вход узла суммирования связан с источником постоянного напряжения смещения, а его выход подключен к соответствующему входу первого микроконтроллера. Другой вход первого микроконтроллера подключен к источнику постоянного напряжения смещения. К соответствующим выходам первого микроконтроллера подключены входы первого и второго усилителей мощности, а к соответствующим входам первого микроконтроллера подключены первый и второй входы тиристорного преобразователя, первый и второй входы второго микроконтроллера подключены к выходу сглаживающего фильтра, вход которого подключен к выходу датчика тока. Третий вход второго микроконтроллера связан с источником постоянного опорного напряжения, а его первый и второй выходы подключены, соответственно, к входам первой и второй гальванических развязок, выходы которых подключены к соответствующим входам первого микроконтроллера, при этом пульт управления связан с первым микроконтроллером.
Другой вход первого микроконтроллера подключен к источнику постоянного напряжения смещения. К соответствующим выходам первого микроконтроллера подключены входы первого и второго усилителей мощности, а к соответствующим входам первого микроконтроллера подключены первый и второй входы тиристорного преобразователя, первый и второй входы второго микроконтроллера подключены к выходу сглаживающего фильтра, вход которого подключен к выходу датчика тока. Третий вход второго микроконтроллера связан с источником постоянного опорного напряжения, а его первый и второй выходы подключены, соответственно, к входам первой и второй гальванических развязок, выходы которых подключены к соответствующим входам первого микроконтроллера, при этом пульт управления связан с первым микроконтроллером.
Известно устройство управления асинхронным двигателем [свидетельство РФ на полезную модель 9102, МПК Н02Р 3/16, опубл. 16.01.1999], выбранное в качестве прототипа, содержащее микропроцессорный контроллер, обладающий возможностью формирования широтно-импульсной модуляции выходного сигнала по синусоидальному закону, двигатель переменного тока электропривода, датчики напряжения и тока, трехфазный мостовой инвертор с датчиком температуры, коммутационную аппаратуру, трехфазный мостовой выпрямитель, входы которого через коммутационную аппаратуру соединены с силовой сетью, а выход подключен к выводам емкости сглаживающего фильтра. Первый вывод емкости сглаживающего фильтра соединен с первыми входами трехфазного мостового инвертора и датчика напряжения. Второй вывод емкости сглаживающего фильтра через последовательно соединенный датчик тока подключен ко второму входу трехфазного мостового инвертора и датчика напряжения. К трем выходам трехфазного мостового инвертора подсоединен двигатель электропривода переменного тока, входы управления трехфазного мостового инвертора соединены с выходами микропроцессорного контроллера. Входы которого соединены с выходами датчиков тока, напряжения и температуры. Первый вход микропроцессорного контроллера соединен с выходом датчика давления. Выходы последовательно соединенных ключа, токового реле и резистора, а также входы порогового элемента соединены с первым и вторым выводами емкости сглаживающего фильтра. Управляющий вывод ключа соединен с выходом порогового элемента. Нормально замкнутые контакты токового реле включены последовательно в цепь питания коммутационной аппаратуры.
Первый вывод емкости сглаживающего фильтра соединен с первыми входами трехфазного мостового инвертора и датчика напряжения. Второй вывод емкости сглаживающего фильтра через последовательно соединенный датчик тока подключен ко второму входу трехфазного мостового инвертора и датчика напряжения. К трем выходам трехфазного мостового инвертора подсоединен двигатель электропривода переменного тока, входы управления трехфазного мостового инвертора соединены с выходами микропроцессорного контроллера. Входы которого соединены с выходами датчиков тока, напряжения и температуры. Первый вход микропроцессорного контроллера соединен с выходом датчика давления. Выходы последовательно соединенных ключа, токового реле и резистора, а также входы порогового элемента соединены с первым и вторым выводами емкости сглаживающего фильтра. Управляющий вывод ключа соединен с выходом порогового элемента. Нормально замкнутые контакты токового реле включены последовательно в цепь питания коммутационной аппаратуры.
Недостатком этих устройств является то, что они способны управлять только конкретным видом электродвигателя.
Задачей полезной модели является создание устройства управления асинхронным двигателем и двигателями постоянного тока.
Поставленная задача решена за счет того, что устройство управления асинхронным двигателем и двигателями постоянного тока, так же, как в прототипе содержит источник питания, к которому подключен интеллектуальный транзисторный модуль, связанный с устройством управления, асинхронный двигатель. Согласно полезной модели к интеллектуальному транзисторному модулю и устройству управления подключено реле, связанное с асинхронным двигателем и одним выводом обмоток якорей от одного до трех двигателей постоянного тока, обмотки возбуждения которых параллельно подключены к источнику питания. К устройству управления и к источнику питания подключен блок реле, к которому подсоединены вторым выводом обмотки якорей двигателей постоянного тока.
Предложенная схема устройства управления асинхронным двигателем и двигателями постоянного тока позволяет с помощью одного устройства управлять по заданному технологическому параметру асинхронным двигателем и двигателями постоянного тока (до трех одновременно) с обеспечением реверса и электродинамического торможения. Устройство так же обеспечивает фильтрацию входных сигналов, защиту от ошибочных команд, защиту от перегрузки и короткого замыкания; реализовывать цифровые локальные контуры регулирования тока, частоты вращения, а также различных параметров технологических процессов.
Устройство так же обеспечивает фильтрацию входных сигналов, защиту от ошибочных команд, защиту от перегрузки и короткого замыкания; реализовывать цифровые локальные контуры регулирования тока, частоты вращения, а также различных параметров технологических процессов.
На фиг.1 изображена принципиальная схема устройства управления асинхронным двигателем и двигателями постоянного тока.
Устройство управления асинхронным двигателем и двигателями постоянного тока содержит источник питания 1 (ИП), подключенный к промышленной сети. К источнику питания параллельно подключен интеллектуальный транзисторный модуль 2 (ИТМ), соединенный с устройством управления 3 (УУ). К источнику питания параллельно подключены обмотки возбуждения 4.1, 4.2, 4.3 двигателей постоянного тока и блок реле 5 (БР). Обмотки якоря 6.1, 6.2, 6.3 двигателей постоянного тока, подключены одним концом к реле 7 (Р), которое соединено с интеллектуальным транзисторным модулем 2 (ИТМ), а другим — к блоку реле 5 (БР). Реле 7(Р) связано с устройством управления 3 (УУ). Блок реле 5 (БР) подключен к устройству управления 3 (УУ). Асинхронный двигатель 8 подключен к реле 7 (ИТМ). Устройство управления 3 (УУ) может быть связано с любым аналоговым датчиком и ЭВМ.
Реле 7(Р) связано с устройством управления 3 (УУ). Блок реле 5 (БР) подключен к устройству управления 3 (УУ). Асинхронный двигатель 8 подключен к реле 7 (ИТМ). Устройство управления 3 (УУ) может быть связано с любым аналоговым датчиком и ЭВМ.
В качестве источника питания 1 (ИП) может быть использован любой источник питания постоянного тока. В качестве интеллектуального транзисторного модуля 2 (ИТМ) может быть использован любой интеллектуальный транзисторный модуль, содержащий три пары транзисторов. В качестве устройства управления 3 (УУ) может быть использовано любое цифровое устройство на микроконтроллере или микропроцессоре, содержащее шесть широтно-импульсных модуляторов, дискретные выходы и аналоговые входы. Блок реле 5 (БР) может быть составлен из любых реле с переключающимся контактом. В качестве реле 7 (Р) можно использовать любое переключающееся трехфазное реле.
Устройство управления асинхронным двигателем и двигателями постоянного тока может работать в двух режимах.
Первый режим — режим асинхронного двигателя.
Выпрямленное напряжение от источника питания 1 (ИП) поступает на интеллектуальный транзисторный модуль 2 (ИТМ) и на блок реле 5 (БР). Устройство управления 3 (УУ) коммутирует, с помощью реле 7 (Р), сигнал с интеллектуального транзисторного модуля 2 (ИТМ) на асинхронный двигатель 8. На интеллектуальном транзисторном модуле 2 (ИТМ) устройство управления 2 (УУ) формирует с помощью широтно импульсной модуляции синусоидальное трехфазное напряжение с регулируемой частотой, поступающее на асинхронный двигатель 8. Блок реле 5 (БР) в этом режиме не задействован и может быть использован для включения, по программе, различной нагрузки.
Второй режим — режим двигателя постоянного тока.
Выпрямленное напряжение от источника питания 1 (ИП) поступает на интеллектуальный транзисторный модуль 2 (ИТМ), на обмотки возбуждения 4.1, 4.2, 4.3 двигателя постоянного тока и на блок реле 5 (БР). Устройство управления 3 (УУ) коммутирует, с помощью реле 7 (Р), сигнал с интеллектуального транзисторного модуля 2 (ИТМ) на первый вывод обмотки якоря 6. 1 двигателя постоянного тока, и, в зависимости от требуемого направления вращения двигателя постоянного тока, коммутирует с помощью блока реле 5 (БР) напряжение требуемой полярности на второй вывод обмотки якоря 6.1. На интеллектуальном транзисторном модуле 2 (ИТМ) устройством управления 3 (УУ) формируется широтно-импульсный сигнал, поступающий на первый вывод обмотки якоря 6.1. При реверсе устройство управления 3. (УУ), с помощью блока реле 5 (БР), меняет полярность напряжения на втором выводе обмотки якоря 6.1, и, с помощью интеллектуального транзисторного модуля 2 (ИТМ), полярность на первом выводе обмотки якоря 6.1 двигателя постоянного тока. Динамическое торможение производится путем закорачивания обмотки якоря 6.1 с помощью широтно импульсной модуляции с ограничением по току. Управление двумя или тремя двигателями постоянного тока аналогично управлению одним двигателем постоянного тока.
1 двигателя постоянного тока, и, в зависимости от требуемого направления вращения двигателя постоянного тока, коммутирует с помощью блока реле 5 (БР) напряжение требуемой полярности на второй вывод обмотки якоря 6.1. На интеллектуальном транзисторном модуле 2 (ИТМ) устройством управления 3 (УУ) формируется широтно-импульсный сигнал, поступающий на первый вывод обмотки якоря 6.1. При реверсе устройство управления 3. (УУ), с помощью блока реле 5 (БР), меняет полярность напряжения на втором выводе обмотки якоря 6.1, и, с помощью интеллектуального транзисторного модуля 2 (ИТМ), полярность на первом выводе обмотки якоря 6.1 двигателя постоянного тока. Динамическое торможение производится путем закорачивания обмотки якоря 6.1 с помощью широтно импульсной модуляции с ограничением по току. Управление двумя или тремя двигателями постоянного тока аналогично управлению одним двигателем постоянного тока.
В любом режиме устройство управления 3 (УУ) позволяет реализовывать цифровые локальные контуры регулирования тока, частоты вращения, а также различных параметров технологических процессов и обеспечивает фильтрацию входных сигналов, защиту от ошибочных команд, защиту от перегрузки и короткого замыкания. Устройство управления 3 (УУ) позволяет производить настройку и контроль параметров с помощью ЭВМ.
Устройство управления 3 (УУ) позволяет производить настройку и контроль параметров с помощью ЭВМ.
Устройство управления асинхронным двигателем и двигателями постоянного тока, содержащее источник питания, к которому подключен интеллектуальный транзисторный модуль, связанный с устройством управления, асинхронный двигатель, отличающееся тем, что к интеллектуальному транзисторному модулю и устройству управления подключено реле, связанное с асинхронным двигателем и одним выводом обмоток якорей от одного до трех двигателей постоянного тока, обмотки возбуждения которых параллельно подключены к источнику питания; к устройству управления и к источнику питания подключен блок реле, к которому подсоединены вторым выводом обмотки якорей двигателей постоянного тока.
Тиристорное управление трехфазными асинхронными двигателями
РЕКЛАМА:
В этой статье мы обсудим: 1. Тиристорное управление регуляторами переменного тока. 2. Регулирование переменного напряжения и частоты. 3. Регулирование переменного тока и переменной частоты. 4. Тиристорное управление циклопреобразователями. Контроль сопротивления 7. Схема восстановления мощности скольжения.
3. Регулирование переменного тока и переменной частоты. 4. Тиристорное управление циклопреобразователями. Контроль сопротивления 7. Схема восстановления мощности скольжения.
Тиристорное управление регуляторов переменного тока
:
Регулятор переменного тока преобразует постоянное переменное напряжение в переменное переменное напряжение той же частоты. Несомненно, уровень переменного напряжения можно изменить с помощью автотрансформатора, РПН, реактора насыщения и т. д. Эти устройства используются уже давно и используются до сих пор. Но регуляторы переменного тока, использующие тиристоры и симисторы, становятся все более популярными из-за их высокого КПД, быстрого управления и компактных размеров. Однако регуляторы переменного тока, использующие тиристоры и симисторы, вносят нежелательные гармоники в цепи. Регуляторы переменного тока классифицируются как однофазные и трехфазные. Каждый из них может быть полуволновым (т. е. однонаправленным) или полноволновым (т. е. двунаправленным).
е. двунаправленным).
Поскольку на вход регулятора переменного тока подается переменный ток, он всегда коммутируется от сети. Поэтому принудительная коммутация не требуется. Таким образом, схемы регуляторов переменного тока довольно просты. В регуляторах переменного тока используются два типа управления. Они известны как интегральное управление циклом и фазовое управление.
РЕКЛАМА:
В интегральном цикле управления, также известном как двухпозиционное управление, тиристоры используются в качестве переключателей для подключения двигателя к источнику питания на определенное количество циклов напряжения источника, а затем для его отключения на другое определенное количество циклов . Каждое время включения и выключения состоит из целого числа циклов. Тиристоры включаются импульсами затвора при пересечении нулевого напряжения входного напряжения.
При фазовом управлении тиристоры используются в качестве переключателей для подключения двигателя к источнику питания на определенную часть каждого цикла напряжения питания. Большинство регуляторов переменного тока используют управление фазой. Конфигурации силовых цепей для управления интегральным циклом и управления фазой ничем не отличаются.
Большинство регуляторов переменного тока используют управление фазой. Конфигурации силовых цепей для управления интегральным циклом и управления фазой ничем не отличаются.
Плавное изменение трехфазного переменного напряжения может быть реализовано за счет различных конфигураций силовой цепи.
Трехфазные регуляторы могут быть полуволновыми или двухполупериодными. Схема трехфазного полуволнового регулятора для двигателей, соединенных треугольником или звездой, у которых нейтральная точка недоступна, показана на рис. 3.34. В этой схеме используются три тиристора и три диода. Хотя полуволновой регулятор переменного тока, показанный на рис. 3.34, влияет на снижение стоимости полупроводниковых приборов и не приводит к возникновению постоянных составляющих ни в одной части системы, он вносит больше гармоник в линейный ток, чем двухполупериодный регулятор. . Двухполупериодная схема на практике не используется.
На рис. 3.35 показан трехфазный двухполупериодный регулятор. В нем используется 6 тиристоров, по 2 на каждую фазу. Входной трансформатор может использоваться или не использоваться. Что касается нагрева обмоток двигателя, двигатель, соединенный звездой, питаемый от двухполупериодного регулятора переменного тока, предпочтительнее, чем двигатель, соединенный треугольником, питаемый от двухполупериодного регулятора переменного тока. Это так, потому что любая третья гармоника напряжения, генерируемая противо-ЭДС двигателя, может вызвать блуждающие токи в случае двигателя, соединенного треугольником.
В нем используется 6 тиристоров, по 2 на каждую фазу. Входной трансформатор может использоваться или не использоваться. Что касается нагрева обмоток двигателя, двигатель, соединенный звездой, питаемый от двухполупериодного регулятора переменного тока, предпочтительнее, чем двигатель, соединенный треугольником, питаемый от двухполупериодного регулятора переменного тока. Это так, потому что любая третья гармоника напряжения, генерируемая противо-ЭДС двигателя, может вызвать блуждающие токи в случае двигателя, соединенного треугольником.
Для цепей нагрузки, соединенных треугольником, в которых доступен каждый конец каждой фазы, используется схема, показанная на рис. 3.36. Такое расположение имеет то преимущество, что уменьшает ток устройства, поскольку теперь оно должно проводить 1/√3 тока, если бы они были соединены в линию обмотки треугольником. Как только волна фазного тока известна, волна линейного тока может быть построена с помощью суперпозиции.
Для цепей нагрузки, соединенных звездой, в которых нейтральная точка доступна и может быть разомкнута, может использоваться схема, показанная на рис. 3.37. При таком расположении необходимое количество тиристоров уменьшается до трех, а схема управления значительно упрощается. Потребляемая мощность двигателя может быть на 100 % больше, чем при управлении синусоидальным напряжением, особенно на пониженных скоростях.
3.37. При таком расположении необходимое количество тиристоров уменьшается до трех, а схема управления значительно упрощается. Потребляемая мощность двигателя может быть на 100 % больше, чем при управлении синусоидальным напряжением, особенно на пониженных скоростях.
Регулятор напряжения и частоты :
РЕКЛАМА:
Если изменяется только частота, а напряжение статора поддерживается постоянным, магнитный поток статора не будет соответствовать номинальному значению. Работа с потоком ниже или выше номинального значения нежелательна. Для работы с постоянным потоком необходимо, чтобы ЭДС индукции увеличивалась или уменьшалась линейно с приложенной частотой. При более высоких напряжениях и при работе на высокой частоте потери на статоре очень малы, и, таким образом, работа с постоянным потоком достигается за счет поддержания постоянного отношения V/f.
Регулируемое напряжение и частота статора могут быть получены из систем, показанных на рис. 3.38 или на рис. 3.41, известных как прямоугольный инвертор и инвертор с широтно-импульсной модуляцией (ШИМ) соответственно.
3.38 или на рис. 3.41, известных как прямоугольный инвертор и инвертор с широтно-импульсной модуляцией (ШИМ) соответственно.
Схема питания прямоугольного инвертора показана на рис. 3.38. Трехфазный источник переменного тока преобразуется в постоянный с помощью управляемого выпрямителя. Выход выпрямителя подается на схему фильтра для удаления гармоник. Выход постоянного тока от фильтра подается на управляемый инвертор, который обеспечивает выход переменного напряжения и переменной частоты. Это питание подается на статор трехфазного асинхронного двигателя, скорость которого необходимо регулировать.
РЕКЛАМА:
На рис. 3.39 показаны осциллограммы фазного напряжения V AN , V BN , V CN и осциллограммы линейного напряжения V AB , V BC и V CA . Каждая форма сигнала линейного напряжения смещена по фазе во времени на 120 электрических градусов относительно друг друга и представляет собой квазипрямоугольную волну шириной 120°. Примечательно, что тиристоры инвертора принудительно коммутируются, поскольку асинхронный двигатель является нагрузкой с отстающим коэффициентом мощности. Диоды обратной связи помогают циркулировать реактивной мощности нагрузки с фильтрующим конденсатором и поддерживают волны выходного напряжения фиксированными на уровне напряжения звена постоянного тока.
Примечательно, что тиристоры инвертора принудительно коммутируются, поскольку асинхронный двигатель является нагрузкой с отстающим коэффициентом мощности. Диоды обратной связи помогают циркулировать реактивной мощности нагрузки с фильтрующим конденсатором и поддерживают волны выходного напряжения фиксированными на уровне напряжения звена постоянного тока.
Требуемое соотношение напряжения и частоты асинхронного двигателя показано на рис. 3.40. Когда частота меньше нормальной частоты, напряжение уменьшается в той же пропорции, чтобы поддерживать постоянное значение V/f. На очень низких частотах, когда падение реактивного сопротивления становится меньше по сравнению с падением сопротивления статора (ω L < R), для компенсации этого эффекта требуется приложение дополнительного напряжения. Это означает более высокое отношение V/f. Когда частота превышает нормальную частоту, крутящий момент уменьшается с уменьшением потока в воздушном зазоре, и теперь двигатель работает в области постоянной мощности, как показано на рис. 3.40. Это эквивалентно режиму ослабления поля при управлении скоростью двигателя постоянного тока.
3.40. Это эквивалентно режиму ослабления поля при управлении скоростью двигателя постоянного тока.
При работе на пониженном напряжении снижается напряжение преобразователя и, следовательно, уменьшается коммутационная способность конденсатора. Таким образом, инвертор обычно снабжен вспомогательным источником постоянного напряжения постоянного тока для целей коммутации.
РЕКЛАМА:
Упомянутый выше инвертор не может возвращать мощность обратно в линии питания переменного тока, если для формирования реверсивной системы не добавлен другой выпрямитель с фазовым управлением. Этот метод управления скоростью используется в 3-фазных асинхронных двигателях малых и средних размеров, где передаточное число обычно ограничено до 10:1.0003
Примечательно, что электрическая машина спроектирована в соответствии с точкой, близкой к точке насыщения на кривой намагничивания (или кривой B-H). Это сделано с точки зрения полной загрузки ядра. Если уменьшить частоту статора, поддерживая постоянное напряжение статора, двигатель будет работать в области насыщения и, следовательно, двигатель будет потреблять большой ток намагничивания, что приведет к увеличению потерь в сердечнике и статоре и, следовательно, к снижению эффективности двигателя. Однако, если увеличить только частоту питания, поддерживая постоянное напряжение статора, двигатель будет работать с низкой магнитной индукцией и, таким образом, мощность двигателя будет использоваться недостаточно.
Однако, если увеличить только частоту питания, поддерживая постоянное напряжение статора, двигатель будет работать с низкой магнитной индукцией и, таким образом, мощность двигателя будет использоваться недостаточно.
Схема управления широтно-импульсной модуляцией (ШИМ) переменного напряжения с переменной частотой для асинхронного двигателя показана на рис. 3.41. Это новейший метод, который заменяет описанную выше схему инвертора прямоугольных импульсов.
Инверторы с широтно-импульсной модуляцией (ШИМ)
используют прерывание или импульсный метод для управления выходным переменным напряжением статического инвертора. Напряжение в звене постоянного тока не регулируется диодным выпрямителем. Прямоугольное или ступенчатое выходное напряжение быстро включается и выключается несколько раз в течение каждого полупериода, так что формируется ряд импульсов одинаковой амплитуды. Каждый импульс имеет амплитуду входного напряжения инвертора В DC . Величина основного выходного напряжения регулируется изменением общего времени включения в течение полупериода. Коммутируя одну сторону моста несколько раз в течение полупериода, можно получить выходное напряжение формы волны, показанной на рис. 3.42 (а).
Коммутируя одну сторону моста несколько раз в течение полупериода, можно получить выходное напряжение формы волны, показанной на рис. 3.42 (а).
Простые ШИМ-инверторы могут быть легко созданы для создания формы сигнала всего с двумя импульсами за полупериод в пределах шестиступенчатой огибающей, как показано на рис. 3.42 (b). В таком сигнале присутствуют значительные пятая и седьмая гармоники, которые вызывают заметное ухудшение низкоскоростных характеристик двигателя переменного тока. Для устранения гармоник низкого порядка используются более совершенные методы ШИМ, в которых высокочастотные импульсы возникают на протяжении всего полупериода.
В сложных системах ШИМ ширина импульса изменяется в течение полупериода синусоидальным образом, как показано на рис. 3.43. На самом деле импульсы должны располагаться через равные интервалы, а ширина импульса в определенном положении должна быть пропорциональна площади под синусоидой в этом положении. В сигнале ШИМ самая низкая частота гармоники приходится на частоту повторения импульсов, и, если она намного выше основной частоты, адекватная фильтрация обеспечивается индуктивностью машины.
Такие сигналы обычно создаются с помощью схемы управления, в которой высокочастотный треугольный сигнал смешивается с синусоидальным сигналом желаемой частоты. Управление напряжением достигается за счет изменения ширины всех импульсов без изменения синусоидального соотношения.
На рис. 3.44 показан метод синусоидальной ШИМ, в котором равнобедренная треугольная волна сравнивается с сигналом синусоидальной волны, а точки коммутации определяются точками пересечения. Если индекс модуляции оказывается меньше единицы, на выходе появляются только гармоники несущей частоты с боковыми полосами, связанными с основной частотой.
Такая форма волны генерирует меньше гармонического нагрева и пульсации крутящего момента по сравнению с прямоугольной волной. Когда индекс модуляции превышает единицу, максимальное напряжение получается в прямоугольном режиме. Таким образом, режим ШИМ применим в области постоянного крутящего момента, в то время как в области постоянной мощности работа аналогична работе в режиме прямоугольной волны.
Транзисторное ШИМ-управление, показанное на рис. 3.45, используется для управления двигателями малых и средних размеров. Безусловно, силовые транзисторы стоят намного дороже, чем тиристоры той же мощности, но экономия за счет исключения схемы коммутации и соответствующих коммутационных потерь, схема оказывается более экономичной и эффективной. Кроме того, транзисторы работают быстрее, ШИМ возможен на более высокой частоте. Это дополнительно снижает потери машины.
Регулятор частоты переменного тока :
Схема управления переменной частотой тока для асинхронного двигателя показана на рис. 3.46. Переменное постоянное напряжение, обеспечиваемое выпрямителем с фазовым управлением, преобразуется в источник тока путем последовательного подключения большой катушки индуктивности. Большая индуктивность поддерживает постоянный ток. Напряжение, доступное на клеммах статора трехфазного асинхронного двигателя, почти синусоидальное с наложенными пиками напряжения из-за коммутации. Используемый преобразователь представляет собой коммутируемую линию, в то время как инвертор коммутируется принудительно, поскольку асинхронный двигатель работает с отстающим коэффициентом мощности. Преобразователь с фазовым управлением можно заменить диодным выпрямителем, за которым следует прерыватель постоянного тока.
Используемый преобразователь представляет собой коммутируемую линию, в то время как инвертор коммутируется принудительно, поскольку асинхронный двигатель работает с отстающим коэффициентом мощности. Преобразователь с фазовым управлением можно заменить диодным выпрямителем, за которым следует прерыватель постоянного тока.
Схема имеет следующие преимущества:
(i) Поскольку входной ток постоянен, пропуски зажигания устройств и короткие замыкания не представляют проблемы.
(ii) Меньшее количество компонентов в цепи инвертора и меньшие коммутационные потери.
(iii) Прочная и надежная силовая цепь.
(iv) Более простая и надежная схема управления. Это связано с тем, что нужно управлять только 6 тиристорами.
(v) Пиковый ток устройств ограничен.
(vi) Он может работать с реактивными или рекуперативными нагрузками без обратных диодов.
Недостатки:
(i) Несколько вялая реакция привода.
(ii) Несколько громоздкий и дорогой инвертор. Это связано с большими размерами индуктивности и коммутационных конденсаторов.
Это связано с большими размерами индуктивности и коммутационных конденсаторов.
(iii) Низкочастотный диапазон инвертора.
(iv) Он не может работать без нагрузки. Это связано с тем, что для удовлетворительной коммутации инвертора необходим некоторый минимальный ток нагрузки.
Тиристорное управление циклопреобразователями
:
Циклоконвертер преобразует переменный ток одной частоты в переменный ток другой частоты. Циклопреобразователи можно классифицировать как однофазные в однофазные, трехфазные в однофазные и трехфазные в трехфазные устройства. Их также можно разделить на повышающие и понижающие циклопреобразователи. Повышающий циклоконвертер обеспечивает выходную частоту, частота которой выше, чем входная, в то время как понижающий циклоконвертер обеспечивает выходную частоту ниже, чем входная.
Понижающий циклоконвертер использует линейную или естественную коммутацию. Циклопреобразователи изначально разрабатывались для систем электрической тяги, работающих на частотах 25 Гц и 16 2/3 Гц. На ранних этапах использования циклопреобразователи использовали ртутно-дуговые выпрямители. С развитием тиристоров увеличилось применение циклопреобразователей.
На ранних этапах использования циклопреобразователи использовали ртутно-дуговые выпрямители. С развитием тиристоров увеличилось применение циклопреобразователей.
Принципиальная схема силовой цепи трехфазного циклопреобразователя показана на рис. 3.47.
Независимое управление выходной частотой и напряжением достигается изменением только одного параметра, а именно изменением точек включения управляемых выпрямителей. Частота выходного напряжения регулируется скоростью, с которой точки срабатывания изменяются относительно точки покоя, а выходное напряжение регулируется максимальным отклонением точек срабатывания от точки покоя. Циклопреобразователь со связанной с ним схемой зажигания выдает выходное напряжение, которое является копией опорного напряжения.
Работа циклоконвертера характеризуется рядом особенностей. Как правило, они используются в качестве понижающих преобразователей частоты. Не существует фиксированного минимального отношения входной частоты к выходной; однако выходная частота обычно ограничивается одной третью или половиной входной или сетевой частоты. Ниже этих соотношений эффективность как циклопреобразователей, так и двигателей, поставляемых ими, начинает значительно падать.
Ниже этих соотношений эффективность как циклопреобразователей, так и двигателей, поставляемых ими, начинает значительно падать.
Реверсивность — еще одна особенность приводных систем циклоконвертера. Привод двигателя переменного тока с питанием от циклопреобразователя будет реагировать на изменение полярности входных сигналов путем изменения направления вращения двигателя без использования контакторов для изменения последовательности фаз.
Еще одной важной характеристикой является способность циклопреобразователя управлять потоком мощности в любом направлении. Это, вместе с упомянутой выше функцией реверсивности, обеспечивает привод асинхронного двигателя, способный работать в любом из четырех квадрантов кривой скорости двигателя.
Хотя циклоконвертер имеет много привлекательных с теоретической точки зрения характеристик, у него есть несколько ограничений, из-за которых он не стал популярным. Ему нужно больше силовых полупроводников, чем инвертору. Например, для трехфазного циклопреобразователя требуется 18 тиристоров, тогда как для комбинации выпрямитель-инвертор (рис. 3.38) требуется только 12 тиристоров.
3.38) требуется только 12 тиристоров.
Циклопреобразователи
могут производить только субчастотный выход. Загрязнение линии гармониками и низким коэффициентом мощности также может быть проблемой для циклопреобразователей высокой номинальной мощности. Однако недавние достижения в области устройств быстрого переключения привели к созданию устройств, известных как преобразователи частоты с принудительной коммутацией (FCDFC), которые работают с высокой эффективностью и имеют низкое содержание гармоник.
Приводы циклопреобразователей
обычно используются для двигателей больших размеров, поскольку стоимость и сложность силовых цепей и цепей управления не позволяют использовать их для обычных приложений. Циклопреобразователи использовались в дизельных электровозах, где высокочастотный генератор переменного тока, соединенный с валом двигателя, обеспечивает мощность на входе. Они также использовались в безредукторных приводах цементных мельниц или шаровых мельниц.
Пуск при пониженном напряжении (плавный пуск) :
Пусковой линейный ток при полном напряжении асинхронного двигателя может примерно в 6 раз превышать номинальный ток при полной нагрузке. Такой большой ток может вызвать сильное падение напряжения в сети, питающей асинхронный двигатель.
Такой большой ток может вызвать сильное падение напряжения в сети, питающей асинхронный двигатель.
Схема, показанная на рис. 3.48, может использоваться для подачи пониженного напряжения при пуске. Как видно, это трехфазный регулятор переменного тока. При правильном управлении углом открытия регулятор обеспечивает низкое выходное напряжение, подаваемое на асинхронный двигатель. Когда двигатель достигает полной или номинальной скорости, регулятор может быть закорочен механическим контактором, чтобы двигатель работал нормально при номинальном напряжении. Более того, если двигатель используется для привода с постоянной скоростью, можно работать с двигателем при пониженном напряжении, когда механическая нагрузка невелика. Работа при пониженном напряжении приводит к уменьшению потерь мощности в двигателе и, таким образом, к экономии энергии.
Контроль сопротивления ротора :
Обычный метод подключения сопротивлений через контактные кольца асинхронного двигателя с фазным ротором представляет собой форму контроля напряжения ротора. Основным недостатком этого метода управления скоростью является его низкая эффективность из-за потери мощности во внешних резисторах.
Основным недостатком этого метода управления скоростью является его низкая эффективность из-за потери мощности во внешних резисторах.
На рис. 3.49 (а) показаны трехфазный диодный выпрямитель и запирающий тиристор (GTO), включенные в цепь ротора асинхронного двигателя с фазным ротором. ГТО, работающий как прерыватель, изменяет сопротивление R в соответствии с рабочим циклом α. Эффективное сопротивление R e определяется как-
R e = R (1 – α) …(3,59)
Таким образом, скорость асинхронного двигателя с фазным ротором регулируется путем изменения соотношения времени включения и времени выключения.
Схема рекуперации мощности тиристора:
Рис. 3.49 (б) показывает схему, известную как восстановление мощности скольжения Рис. 3.48. Выводы ротора подключены к трехфазной сети переменного тока через два полностью управляемых тиристорных моста. Мост 1 действует как выпрямитель (или преобразователь), а мост 2 действует как инвертор. Выходная мощность ротора может возвращаться обратно к источнику питания. Поскольку частота токов ротора является частотой скольжения, этот метод известен как схема восстановления мощности скольжения. Управляя углами открытия двух мостов, можно изменять выходную мощность ротора.
Выходная мощность ротора может возвращаться обратно к источнику питания. Поскольку частота токов ротора является частотой скольжения, этот метод известен как схема восстановления мощности скольжения. Управляя углами открытия двух мостов, можно изменять выходную мощность ротора.
Таким образом, скольжение и скорость двигателя (при том же крутящем моменте) также изменятся. Однако недостатком этой схемы является то, что оба моста потребляют реактивную мощность от питающей сети. Следовательно, общий коэффициент мощности двигателя плохой. Если желательны скорости только ниже синхронной, мост 1 может быть неуправляемым и, таким образом, может состоять из диодов. Если оба моста управляются, работа двух мостов также может быть реверсирована для получения скорости выше синхронной.
Фактически мощность скольжения либо возвращается в сеть питания, как в схеме Шербиуса, либо используется для привода вспомогательного двигателя, который механически соединен с валом асинхронного двигателя, как в схеме Крамера.
1. Статический привод Шербиуса:
Статический привод Шербиуса также использует принцип восстановления мощности скольжения. Принципиальная схема показана на рис. 3.50. Для достижения как субсинхронного, так и сверхсинхронного управления скоростью преобразователи 1 и 2 должны быть полностью управляемыми тиристорными мостами, один из которых работает на частоте скольжения как выпрямитель или инвертор, а другой работает на частоте сети как инвертор или выпрямитель. Стоимость преобразователей весьма ощутима, а также требуется стробирующая схема со сдвигом частоты.
Кроме того, при скоростях, близких к синхронным, когда ЭДС частоты скольжения достаточно малы для естественной коммутации, требуются специальные соединения для методов принудительной коммутации. Если преобразователь 1 взять неуправляемый (диодный мост), каскад преобразователя и блок управления станут экономичными и простыми, но тогда будет доступно только подсинхронное управление скоростью.
Трехфазный трансформатор между источником питания и инвертором 2 предназначен для доведения напряжения цепи ротора до значения, соответствующего напряжению источника питания. Основным недостатком субсинхронного каскадного привода является низкий коэффициент мощности, особенно на пониженных скоростях.
Этот привод применяется в приводах вентиляторов и насосов большой мощности, которым требуется регулирование скорости только в узком диапазоне. Номинальная мощность инвертора и трансформатора с диодным мостом равна максимальному скольжению, умноженному на номинальную мощность двигателя, что приводит к низкой стоимости привода. Этот привод обеспечивает постоянный контроль крутящего момента. Постоянный контроль мощности можно получить с помощью привода Kramer, обсуждаемого ниже.
2. Статический привод Kramer:
На рис. 3.51 показана принципиальная схема каскада Крамера со статическим преобразователем. Цепь ротора асинхронного двигателя с контактными кольцами подает мощность скольжения, выпрямленную диодным мостом, на якорь двигателя постоянного тока с независимым возбуждением, механически связанного с асинхронным двигателем. Регулирование скорости достигается путем изменения тока возбуждения двигателя постоянного тока. Можно считать, что ЭДС, пропорциональная противоЭДС двигателя постоянного тока, вводится в цепь ротора асинхронного двигателя, вызывая изменение скорости системы.
Регулирование скорости достигается путем изменения тока возбуждения двигателя постоянного тока. Можно считать, что ЭДС, пропорциональная противоЭДС двигателя постоянного тока, вводится в цепь ротора асинхронного двигателя, вызывая изменение скорости системы.
Для достижения большего диапазона скоростей потребуется замена диодного моста на тиристорный мост. С помощью тиристорных мостов скорость можно регулировать вплоть до полной остановки.
Статический привод Крамера не имеет инвертора с линейной коммутацией, он потребляет меньше реактивной мощности и вносит меньше гармоник в токи, чем статический привод Шербиуса. Однако у него есть проблемы с техническим обслуживанием, которые возникают из-за коллектора и щеток вспомогательного двигателя постоянного тока. Он также имеет недостаток большой момент инерции.
Системы статического привода Kramer используются в насосах большой мощности и нагрузках компрессорного типа, где регулирование скорости осуществляется в узком диапазоне и ниже синхронной скорости.
Главная ››
Тиристорная управляемая мощность для однофазного асинхронного двигателя с использованием микроконтроллера
pic
Тиристорное регулирование мощности для однофазного асинхронного двигателя: Управление мощностью является очень важным фактором, особенно с точки зрения силовой электроники для передачи мощности на выходную нагрузку для ее хорошей работы. Различные методы или типологии используются для управления мощностью с помощью полупроводниковых устройств, в некоторых из которых используется полевой транзистор на основе оксида металла (MOSFET), а в некоторых — транзистор с биполярным переходом (BJT). Схема обнаружения пересечения нуля будет полезна для вас в этом проекте электроники . Здесь мы будем управлять мощностью однофазного двигателя , подключив тиристор на входной стороне однофазного двигателя. Мощность будет регулироваться изменением угла открытия тиристора.
Эта топология или метод управления мощностью имеет более высокую производительность и эффективность по сравнению с другими методами управления мощностью. В этой методике напряжение будет детектировать в каждый конкретный момент времени и тогда тиристор будет срабатывать при любом напряжении. Таким образом можно легко контролировать мощность. Здесь мы бы сделали эту систему питания с тиристорным управлением с помощью однофазного трансформатора, мостового выпрямителя, регулятора напряжения, полупроводникового переключателя SCR, микроконтроллера 18F452, который принадлежит к семейству pic, компаратора и оптопары или оптоизолятора.
Содержание
Блок-схема системы питания с тиристорным управлением для однофазного асинхронного двигателя
На приведенном ниже рисунке показана блок-схема системы питания с тиристорным управлением для однофазного асинхронного двигателя.
Список компонентов системы питания с тиристорным управлением для однофазного асинхронного двигателя.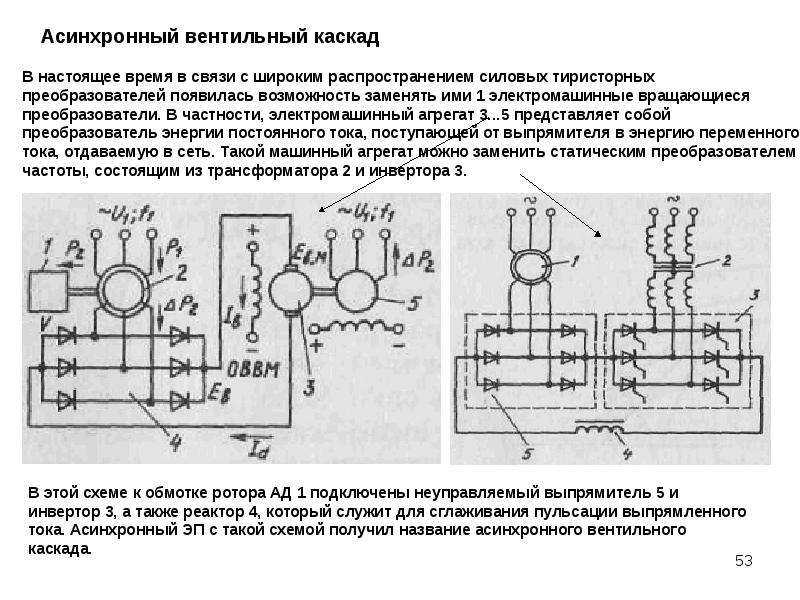 повышать или понижать переменное напряжение и работает по принципу взаимной индукции. В этой тиристорной системе питания он используется для понижения напряжения 220 В до 12 В переменного тока.
повышать или понижать переменное напряжение и работает по принципу взаимной индукции. В этой тиристорной системе питания он используется для понижения напряжения 220 В до 12 В переменного тока.
Мостовой выпрямитель: Мостовой выпрямитель состоит из четырех диодов и используется для преобразования переменного тока в постоянный. В этой системе питания с тиристорным управлением он используется только для преобразования переменного напряжения в постоянное.
Блокировочный диод: В этой тиристорной системе питания диод подключается на выходе мостового выпрямителя для блокировки обратного тока к мостовому выпрямителю.
Регулятор напряжения: В этой системе питания с тиристорным управлением регулятор напряжения используется только для регулирования 12 постоянного тока в 5 В постоянного тока для питания микроконтроллера и других электронных компонентов.
Детектор перехода через ноль: В этой тиристорной, управляемой системе питания детектор перехода через ноль в основном представляет собой компаратор, который сравнивает два входа, один вход поступает со стороны входа, а второй является опорным входом, который поступает, возможно, от переменного резистора или выхода. сторона. Когда один вход больше, чем другой вход, выход компаратора будет высоким.
сторона. Когда один вход больше, чем другой вход, выход компаратора будет высоким.
Микроконтроллер pic 18F452: В этой системе питания с тиристорным управлением микроконтроллер pic 18F452 используется для управления углом открытия тиристора. Этот контроллер получает питание 5 В постоянного тока и взаимодействует с двумя оптопарами. Он состоит из 40 контактов, и эти контакты могут быть настроены как вход или выход, и один вход поступает от компаратора. Программируется на языке c с помощью программного обеспечения mikro/c.
Оптопара: Оптопара представляет собой 6-контактное устройство интегральной схемы, и в этой системе питания с тиристорным управлением она используется для изоляции и для задания угла открытия тиристора. Тиристор включается/выключается по сигналу ангела зажигания оптопары.
Тиристор: Тиристор представляет собой полупроводниковый переключатель и состоит из трех выводов: анода, катода и затвора. Когда на клемму затвора подается положительный сигнал, этот тиристор находится во включенном состоянии. Изменяя этот сигнал затвора, тиристор можно легко включить или выключить.
Когда на клемму затвора подается положительный сигнал, этот тиристор находится во включенном состоянии. Изменяя этот сигнал затвора, тиристор можно легко включить или выключить.
Нагрузка: Это в основном система питания с тиристорным управлением, и любой тип нагрузки может подключаться на стороне выхода. Здесь мы будем проверять эту систему, подключив резистивную нагрузку, значит, мы будем подключать сюда лампу.
Принцип работы системы питания с тиристорным управлением для однофазного асинхронного двигателя
Эта система питания с тиристорным управлением работает по принципу изменения угла включения тиристора. Когда угол открытия изменяется, мощность изменяется. Эта система имеет два переключателя: один для включения этой системы и один для переключателя изменения угла стрельбы. Эта система питается напрямую от источника питания wapda, и мы будем проверять эту систему, проверяя яркость выходной лампы. Когда эта система включена и нажат переключатель угла открытия, компаратор сравнивает два входа и подает сигнал на микроконтроллер. Микроконтроллер, в котором с помощью языка программирования устанавливается время задержки угла открытия, а затем микроконтроллер подает задержанный сигнал на оптопару, после чего оптопара дает сигнал запуска на тиристор. В зависимости от этого угла открытия тиристор включается или выключается, а затем этот тиристор включается или выключается на выходной нагрузке. Угол открытия изменяется путем изменения времени задержки, а при изменении времени задержки изменяется выходная мощность. Выходная мощность обратно пропорциональна времени задержки, т.е. когда задержка увеличивается, выходная мощность уменьшается. Здесь мы бы проверили эту систему, изменив угол стрельбы. При изменении угла освещения изменяется выходная мощность, а затем изменяется и яркость лампы.
Когда эта система включена и нажат переключатель угла открытия, компаратор сравнивает два входа и подает сигнал на микроконтроллер. Микроконтроллер, в котором с помощью языка программирования устанавливается время задержки угла открытия, а затем микроконтроллер подает задержанный сигнал на оптопару, после чего оптопара дает сигнал запуска на тиристор. В зависимости от этого угла открытия тиристор включается или выключается, а затем этот тиристор включается или выключается на выходной нагрузке. Угол открытия изменяется путем изменения времени задержки, а при изменении времени задержки изменяется выходная мощность. Выходная мощность обратно пропорциональна времени задержки, т.е. когда задержка увеличивается, выходная мощность уменьшается. Здесь мы бы проверили эту систему, изменив угол стрельбы. При изменении угла освещения изменяется выходная мощность, а затем изменяется и яркость лампы.
Различные области применения и преимущества системы питания с тиристорным управлением
- Система питания с тиристорным управлением может использоваться для управления реактивной мощностью асинхронного двигателя. Управляя реактивной мощностью двигателя, мы можем легко изменить скорость двигателя.
- Эта система может использоваться для управления яркостью выходных ламп.
- Эту систему также можно использовать для управления скоростью двигателей постоянного тока.
- Эта система может использоваться в синхронных генераторах для изменения возбуждения обмотки возбуждения генератора. Управляя возбуждением возбуждения, можно управлять выходным напряжением синхронного генератора.
- С помощью этой системы можно повысить производительность и эффективность промышленного оборудования.
 Управляя реактивной мощностью двигателя, мы можем легко изменить скорость двигателя.
Управляя реактивной мощностью двигателя, мы можем легко изменить скорость двигателя.Рубрики Проекты микроконтроллеров PIC, Проекты силовой электроники
Введите адрес электронной почты, чтобы подписаться на этот блог и получать уведомления о новых сообщениях по электронной почте.
Адрес электронной почты
индукция%20двигатель%20скорость%20управление%20с%20scr спецификация и примечания по применению
Лучшие результаты (6)
| Часть | Модель ECAD | Производитель | Описание | Техническое описание Скачать | Купить Часть |
|---|---|---|---|---|---|
| LDC5072Q1EVM | Инструменты Техаса | Модуль оценки индуктивного датчика положения | |||
| LDC1000NHRR | Инструменты Техаса | 5 В, высокое разрешение, преобразователь индуктивности в цифровой для приложений индуктивных датчиков 16-WSON от -40 до 125 | |||
| LDC1000NHRJ | Инструменты Техаса | 5 В, высокое разрешение, преобразователь индуктивности в цифровой для приложений индуктивных датчиков 16-WSON от -40 до 125 | |||
| LDC1000NHRT | Инструменты Техаса | 5 В, высокое разрешение, преобразователь индуктивности в цифровой для приложений индуктивных датчиков 16-WSON от -40 до 125 | |||
| LDC1051NHRT | Инструменты Техаса | 8-битный только Rp Преобразователь индуктивности в цифру с SPI для приложений индуктивных датчиков 16-WSON от -40 до 125 | |||
| LDC1051NHRJ | Инструменты Техаса | 8-битный только Rp Преобразователь индуктивности в цифру с SPI для приложений индуктивных датчиков 16-WSON от -40 до 125 |
 org/Product»>
org/Product»> org/Product»>
org/Product»>индукция%20двигатель%20скорость%20управление%20с%20scr Листы данных Context Search
| Каталог данных | MFG и тип | ПДФ | Теги документов |
|---|---|---|---|
Векторное управление машинами переменного тока. Петр Вас. Оксфорд Реферат: Данные обмотки статора асинхронного двигателя переменного тока Векторное управление машинами переменного тока Петр Вас. Оксфорд Векторное управление машинами переменного тока». Питер Вас. Оксфорд ПРЯМОЕ УПРАВЛЕНИЕ МОМЕНТОМ Асинхронный двигатель dtc прямое управление моментом асинхронного двигателя с помощью синхронного реактивного двигателя с ПИ SKHI22 наблюдатель за моментом асинхронного двигателя | Оригинал | ТМС320С32 Векторное управление машинами переменного тока. Петр Вас. Оксфорд данные обмотки статора асинхронного двигателя переменного тока Векторное управление машинами переменного тока Петр Вас. Оксфорд Векторное управление машинами переменного тока». Питер Вас. Оксфорд ПРЯМОЕ РЕГУЛИРОВАНИЕ КРУТЯЩЕГО МОМЕНТА асинхронный двигатель dtc прямое управление крутящим моментом асинхронного двигателя с помощью PI синхронный реактивный двигатель СХИ22 наблюдатель крутящего момента асинхронного двигателя | |
2000 — управление скоростью двигателя постоянного тока с помощью GSM Аннотация: серводвигатель с радиолокационным управлением положением бесщеточного двигателя pacific Scientific управление скоростью двигателя постоянного тока с использованием GSM управление скоростью асинхронного двигателя с использованием оценки GSM с расширенным фильтром Калмана мини-проект с использованием энкодера управление скоростью двигателя постоянного тока с использованием DTMF Motorola 5600x XC56303PV100D | Оригинал | SG146/Д DSP56800 DSP56300 16-битный управление скоростью двигателя постоянного тока с помощью GSM серводвигатель управления положением радара Тихоокеанский научный бесщеточный двигатель управление скоростью двигателя постоянного тока с помощью GSM управление скоростью асинхронного двигателя с помощью GSM оценка с расширенным фильтром Калмана мини проект с использованием энкодера управление скоростью двигателя постоянного тока с помощью dtmf моторола 5600x XC56303PV100D | |
код двигателя с нечеткой логикой Аннотация: IC 74245 ПИД-регулятор для управления асинхронным двигателем базовая электрическая схема двигателя переменного тока с обратным направлением вперед ПИД-регулятор передаточной функции трехфазного асинхронного двигателя 3-фазный асинхронный двигатель fpga 74245 код verilog для оценки параметров асинхронного двигателя постоянного тока Управление скоростью двигателя постоянного тока с использованием нечеткой логики | Оригинал | ||
2010 — Светильник Фотометрические данные Реферат: индукционная лампа индукционная лампа балласт балласт для индукционной лампы DMVIG2C085GP фотометрические данные лампы VMVIG2A055GP T2D 96 диод QM25 t2d диод | Оригинал | РД739 ДМВИГ165Г RA739 Светильник Фотометрические данные индукционная лампа балласт индукционной лампы балласт для индукционной лампы DMVIG2C085GP фотометрические данные лампы VMVIG2A055GP Т2Д 96 диод QM25 диод t2d | |
2004 — регулирование скорости асинхронного двигателя методом ШИМ Реферат: спецификация управления частотой вращения 3-фазного асинхронного двигателя цепей управления скоростью фазного асинхронного двигателя защита асинхронного двигателя дистанционное управление 3-фазным асинхронным двигателем спецификация асинхронного двигателя переменного тока SG40N 8300ACIMTD 56F8346 | Оригинал | 56F8300 56Ф8300 16-битный 8300ACIMTD 56Ф8100 56F8367EVM 56Ф8346, 56F8357 56F8367 регулирование скорости асинхронного двигателя методом ШИМ Спецификация трехфазного асинхронного двигателя частотно-регулируемое управление скоростью фазовая индукция схемы управления скоростью асинхронного двигателя защита асинхронного двигателя дистанционное управление трехфазным асинхронным двигателем спецификация асинхронного двигателя переменного тока СГ40Н 8300ACIMTD 56F8346 | |
2004 — Спецификация трехфазного асинхронного двигателя Аннотация: дистанционное управление 3-фазным асинхронным двигателем, управление скоростью асинхронного двигателя с помощью метода ШИМ, перенапряжение, 3-фазный асинхронный двигатель, данные о неисправности 3-фазного асинхронного двигателя, защита от перенапряжения 3-фазного асинхронного двигателя, конструкция преобразователя частоты для асинхронного двигателя переменного тока, защита асинхронного двигателя привод скорости двигателя | Оригинал | 56Ф8300 16-битный 8300ACIMTD 56Ф8100 56F8367EVM 56Ф8346, 56F8357 56F8367 Спецификация трехфазного асинхронного двигателя дистанционное управление трехфазным асинхронным двигателем регулирование скорости асинхронного двигателя методом ШИМ трехфазный асинхронный двигатель с перенапряжением Данные о неисправности трехфазного асинхронного двигателя 3-фазный асинхронный двигатель защита от перенапряжения трехфазного асинхронного двигателя конструкция преобразователя частоты для асинхронного двигателя переменного тока защита асинхронного двигателя привод скорости двигателя | |
2010 — электрическая схема индукционной плиты Реферат: схема управления индукционной плитой схема индукционной плиты схема индукционного нагрева индукционная плита конструкция змеевика индукционная плита igbt схема индукционной плиты схема индукционной плиты bosch схема индукционной плиты датчик температуры схема индукционной плиты с IGBT | Оригинал | ||
1998 г. — относительная магнитная проницаемость Реферат: железная кривая bh, магнитная проницаемость магнитного расходомера, применение кривой индукции bh, кривая BH, постоянная намагниченность постоянного магнита | Оригинал | ||
однофазный синусоидальный ШИМ-генератор Реферат: Синусоидальная волна ШИМ Преобразователь постоянного тока в переменный ток Схема трехфазного генератора схема индукционного микроконтроллера на основе однофазной индукции переменного тока Программируемый генератор синусоидальной волны индукция C508 B6435 схема индукции | Оригинал | AP082211 AP082211 20 кГц AP0822 однофазный синусоидальный ШИМ-генератор Синусоидальная волна ШИМ Преобразователь постоянного тока в переменный ток Трехфазный генератор схема индукции Однофазная индукция переменного тока на базе микроконтроллера программируемый генератор синусоиды индукция C508 B6435 диаграмма индукция | |
2002 — обратное преобразование Кларка Abstract: преобразование Парка и Кларка DSP56F803EVMUM Преобразование Парка Дискретный ШИМ исходный код Matlab Исходный код iGBT pid контроллера Matlab Исходный код ПРОСТРАНСТВЕННОЙ ВЕКТОРНОЙ МОДУЛЯЦИИ для преобразования Парка и Кларка реальное преобразование Кларка с использованием Matlab для решения преобразования Лапласа | Оригинал | АН1930/Д обратное преобразование Кларка Преображение Парка и Кларка DSP56F803EVMUM Преображение парка исходный код дискретного PWM matlab iGBT исходный код pid-контроллера в Matlab МОДУЛЯЦИЯ ПРОСТРАНСТВЕННОГО ВЕКТОРА исходный код преобразования парка и кларка в реальность трансформация Кларка использование Matlab для решения преобразования Лапласа | |
Сименс Холл Феррит Резюме: нет абстрактного текста | OCR-сканирование | ||
2010 — Плавный пуск симистора Реферат: Схема диммера света BTA08 ST принципиальная схема индукционная микроволновая печь трансформатор индукционная лампа источник питания для магнетрона галогенный трансформатор симистор схема привода импульсный трансформатор микроволновая печь магнетрон цепь управления скоростью двигателя переменного тока с симистором | Оригинал | АН441 Симисторный плавный пуск Схема диммера света BTA08 ST схема индукции микроволновая печь трансформатор индукционная лампа блок питания для магнетрона галогенный трансформатор Импульсный трансформатор схемы привода симистора магнетрон в микроволновке схема управления скоростью двигателя переменного тока с симистором | |
1997 — относительная магнитная проницаемость Реферат: железный тороид с квадратной петлей магнитной проницаемости кривой bh применение магнитного расходомера кривой bh | Оригинал | ||
2006 — ШИМ ИНВЕРТОР 3-х фазный двигатель переменного тока Аннотация: Контроллер затвора IGBT MC68HC908MR32 Схема управления скоростью двигателя переменного тока с IGBT Схема привода двигателя постоянного тока 230 В Использование IGBT для 3-фазного асинхронного двигателя Спецификация 3-фазного асинхронного двигателя 3-фазные инверторы Защита асинхронного двигателя переменного тока от асинхронного двигателя ШИМ 3-фазный источник напряжения двигателя переменного тока асинхронный двигатель с инверторным управлением | Оригинал | АН3000 MCF523x MCF523x pwm INVERTER 3-фазный двигатель переменного тока Контроллер затвора IGBT MC68HC908MR32 схема управления скоростью двигателя переменного тока с IGBT Схема привода двигателя постоянного тока 230 В использовать igbt для трехфазного асинхронного двигателя Спецификация трехфазного асинхронного двигателя 3-х фазный инвертор асинхронный двигатель переменного тока защита асинхронного двигателя ШИМ 3-фазный двигатель переменного тока асинхронный двигатель с инверторным приводом от источника напряжения | |
2006 — электрическая схема стиральной машины Аннотация: электрическая схема стиральной машины схема управления двигателем стиральной машины микроконтроллер на основе управления скоростью двигателя переменного тока базовая электрическая схема двигателя переменного тока реверс вперед универсальный двигатель стиральной машины схема контроллера двигателя стиральной машины схема управления скоростью двигателя переменного тока с симистором схема управления переменной скоростью двигателя переменного тока центробежная принцип работы стиральной машины | Оригинал | АН3234 MC56F8013 схема стиральной машины электрическая схема стиральной машины схема управления двигателем стиральной машины управление скоростью двигателя переменного тока на основе микроконтроллера Основная электрическая схема двигателя переменного тока с обратным направлением вперед универсальный двигатель стиральной машины схема контроллера двигателя стиральной машины схема управления скоростью двигателя переменного тока с симистором схема управления двигателем переменного тока с регулируемой скоростью принцип работы центробежной стиральной машины | |
1998 — ЭКВИВАЛЕНТ 9974 GP Реферат: преобразование dq «пространственный вектор» tms320 3 фазы в преобразование d-q trzynadlowski SPRA284A 17417 диаграмма индукции U300 DZ 120-5 Dynamic Controls | Оригинал | ТМС320С240 СПРА284А ЭКВИВАЛЕНТ 9974 ГП преобразование dq «космический вектор» тмс320 3-фазное преобразование dq Тшинадловски СПРА284А 17417 диаграмма индукция U300 ДЗ 120-5 Динамическое управление | |
Схема управления переменной скоростью двигателя переменного тока Аннотация: управление скоростью однофазного двигателя переменного тока управление скоростью однофазного асинхронного двигателя однофазное преобразование в трехфазное ic управление скоростью с переменной частотой схема однофазного асинхронного двигателя схема схема привода с переменной частотой схема управления 3-фазным двигателем переменного тока схема управления с переменной скоростью d однофазный асинхронный управление скоростью двигателя переменного тока 3-фазный контроллер скорости асинхронного двигателя переменного тока ic схема управления скоростью однофазного двигателя переменного тока | Оригинал | ХТ46Р14А D/NHA0095E ХТ46Р14 ХТ46Р14А.  схема управления двигателем переменного тока с регулируемой скоростью регулирование скорости однофазного двигателя переменного тока регулирование скорости однофазного асинхронного двигателя ИС преобразования однофазного в трехфазный схема управления переменной частотой вращения однофазного асинхронного двигателя принципиальная схема частотно-регулируемого привода Цепь управления переменной скоростью трехфазного двигателя переменного тока d регулирование скорости однофазного асинхронного двигателя переменного тока 3-фазный регулятор скорости асинхронного двигателя переменного тока ic схема управления скоростью однофазного двигателя переменного тока | |
2004 — преобразование альфа-бета кода Matlab в dq Аннотация: Преобразование Кларка 3 фазы в d-q преобразование 3-фазный асинхронный двигатель переменного тока Векторное управление с использованием 3-фазного 230-вольтового драйвера двигателя постоянного тока Контроллер ослабления поля dq преобразование Конденсатор 470 мкФ — 400 В обратное преобразование Кларка асинхронного двигателя ротор статора | Оригинал | 56F80x, 56Ф8100 56Ф8300 56F80x АН1930 Преобразование альфа-бета кода Matlab в dq трансформация Кларка 3-фазное преобразование dq Векторное управление трехфазным асинхронным двигателем переменного тока с помощью 3-фазный драйвер двигателя постоянного тока 230 В BLDC Контроллер ослабления поля преобразование dq Конденсатор 470мкФ — 400В обратное преобразование Кларка ротор статора асинхронного двигателя | |
2003 — 56F8346EVM Аннотация: схема управления переменной скоростью трехфазного двигателя переменного тока d дистанционное управление трехфазным асинхронным двигателем Управление скоростью двигателя переменного тока 115 В управление скоростью асинхронного двигателя с помощью метода ШИМ Управление скоростью двигателя постоянного тока с помощью ПК. Руководство по обслуживанию трехфазного привода переменного тока. | Оригинал | 56F8346 56F8346 8346ACIMTD/D 56F8346EVM Цепь управления переменной скоростью трехфазного двигателя переменного тока d дистанционное управление трехфазным асинхронным двигателем Регулятор скорости двигателя 115 В переменного тока регулирование скорости асинхронного двигателя методом ШИМ 3-фазный асинхронный двигатель Спецификация трехфазного асинхронного двигателя конструкция частотно-регулируемого привода переменного тока для индукции Управление скоростью двигателя постоянного тока на базе ПК с помощью ПК Руководство по обслуживанию трехфазного привода переменного тока | |
2003 — 3-х фазный асинхронный двигатель Аннотация: схема управления переменной скоростью 3-фазного двигателя переменного тока d спецификация 3-фазного асинхронного двигателя Управление скоростью асинхронного двигателя с помощью метода ШИМ дистанционное управление скоростью двигателя переменного тока 3-фазный инвертор ПРИНЦИП 3-фазный регулятор скорости асинхронного двигателя переменного тока ic асинхронный двигатель 3-фазный инвертор | Оригинал | 56F805 56F805 805ACIMTD/D 56F805EVM 3-фазный асинхронный двигатель Цепь управления переменной скоростью трехфазного двигателя переменного тока d Спецификация трехфазного асинхронного двигателя регулирование скорости асинхронного двигателя методом ШИМ дистанционное управление скоростью двигателя переменного тока 3-фазный ИНВЕРТОР ПРИНЦИП 3-фазный регулятор скорости асинхронного двигателя переменного тока ic 3-фазный индукционный генератор дистанционное управление трехфазным асинхронным двигателем 3-фазный инвертор | |
Недоступно Резюме: нет абстрактного текста | Оригинал | ||
2005 — 3-фазный асинхронный двигатель FPGA Реферат: ПИД-регулятор для трехфазного асинхронного двигателя. ПИД-регулятор для управления асинхронным двигателем. ПИ-управление. PIC bldc. Блок-схема fpga для создания изображения синусоиды | Оригинал | XAPP808 3-фазный асинхронный двигатель FPGA Передаточная функция трехфазного асинхронного двигателя с ПИД-регулятором ПИД-регулятор для управления асинхронным двигателем ПИ-управление PIC-управление скоростью двигателя постоянного тока КОНТРОЛЛЕР СКОРОСТИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА в формате fpga схема управления двигателем схема управления плавным пуском двигателя Скорость двигателя переменного тока и плавный пуск ПИД-регулятор для управления асинхронным двигателем с использованием FPGA БЛОК-СХЕМА ДЛЯ СОЗДАНИЯ синусоидальной волны pic | |
1997 — Схема обмотки асинхронного двигателя 3 фазы 7,5 л.с. Аннотация: данные об обмотке статора асинхронного двигателя переменного тока схема индукционного нагрева схема искусственной нейронной сети схема управления индукционным нагревом схема управления контурами индукционного нагрева 3-фазная обмотка асинхронного двигателя мощностью 7,5 л. | Оригинал | ТМС320С30 СПРА333 Природа323: Схема обмотки трехфазного асинхронного двигателя мощностью 7,5 л.с. данные обмотки статора асинхронного двигателя переменного тока контур индукционного нагрева принципиальная схема искусственной нейронной сети схема управления индукционным нагревом контуры индукционного нагрева Обмотка 3-х фазного асинхронного двигателя мощностью 7,5 л.с. Данные обмотки статора трехфазного асинхронного двигателя переменного тока ЭЛЬГАР большой реферат для проекта робототехники | |
1998 — схема управления переменной скоростью двигателя переменного тока Аннотация: Управление скоростью двигателя вентилятора переменного тока 220 В Схема управления двигателем постоянного тока 220 В постоянного тока Различные типы методов ШИМ Различные методы ШИМ Управление скоростью трехфазного асинхронного двигателя переменного тока Управление скоростью двигателя переменного тока с помощью метода ШИМ v / f метод управления скоростью асинхронного двигателя пространственно-векторный ШИМ с использованием индукционного нагрева блок-схемы DSP | Оригинал | ТМС320С240 СПРА284А схема управления двигателем переменного тока с регулируемой скоростью Регулятор скорости двигателя вентилятора переменного тока 220 В Цепь управления двигателем постоянного тока 220 В постоянного тока Различные типы методов ШИМ различные методы ШИМ регулирование скорости трехфазного асинхронного двигателя переменного тока управление скоростью двигателя переменного тока методом ШИМ v/f метод управления скоростью асинхронного двигателя пространственно-векторная ШИМ с использованием dsp блок-схема индукционного нагрева | |
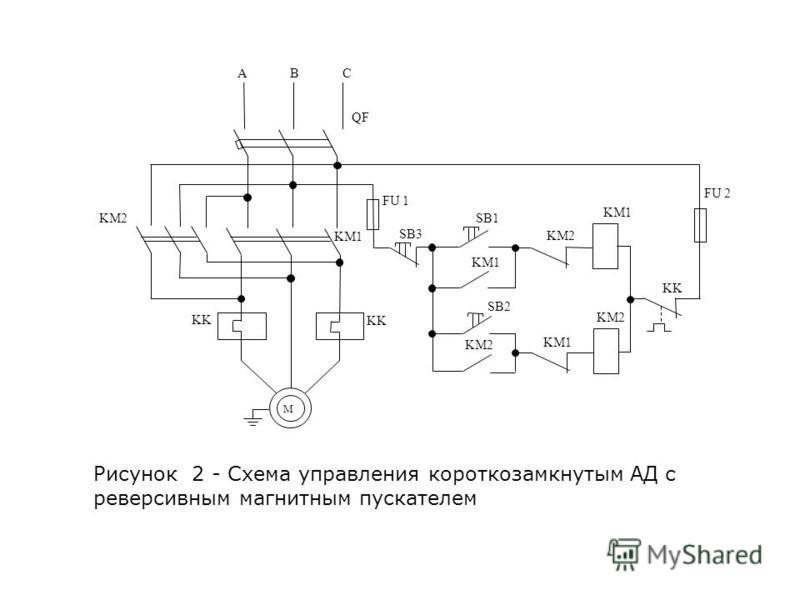 org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»>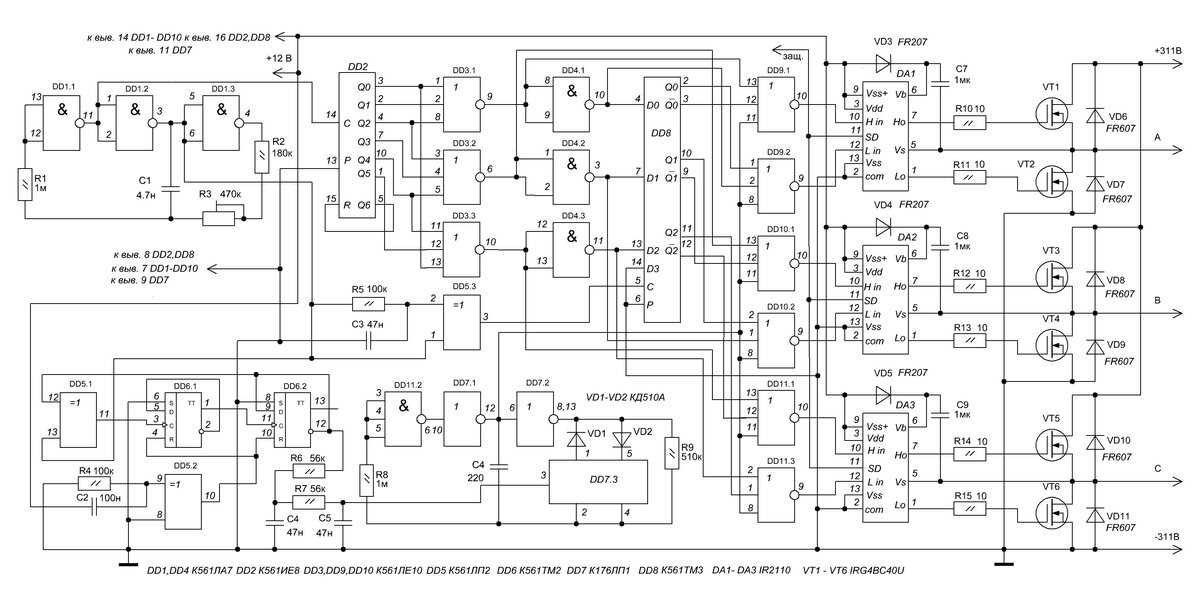 org/Product»>
org/Product»> org/Product»>
org/Product»>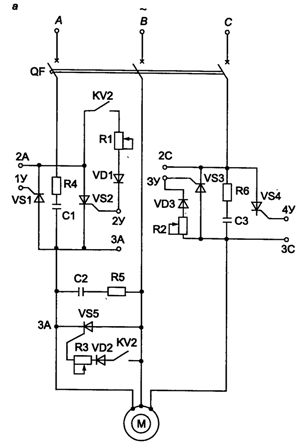 org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»>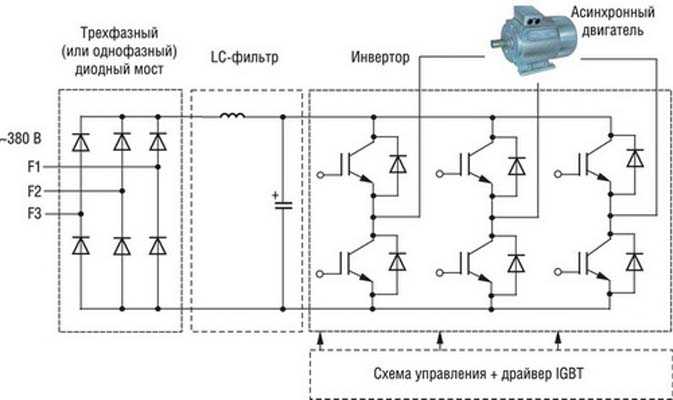 org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»>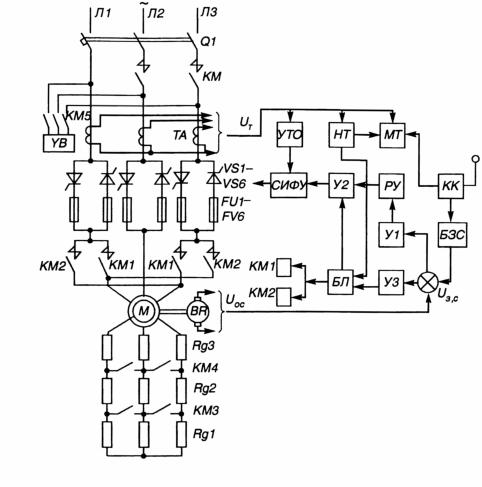 org/Product»>
org/Product»>