Содержание
Особенности определение скольжения асинхронного двигателя классическим методом
Особенности определение скольжения асинхронного двигателя классическим методом
- Главная
- Статьи
- Особенности определение скольжения асинхронного двигателя классическим методом
УДК:
621.313.333.001.5: 621.771.23.016.3.01
Маджидов А. Ш. ассистент кафедры Электрические станции, Национальный исследовательский университет «МЭИ», г. Москва, e-mail: [email protected]
Ключевые слова:
асинхронный двигатель, короткозамкнутый ротор, механизм, насос, вентилятор, компрессор, собственные нужды электростанции и подстанции, механическая характеристика, кратность пускового тока, момент, скольжение, идентификация параметров
Скольжение — это одна из основных характеристик асинхронных двигателей, иными словами скольжение асинхронного двигателя — это относительная разность скоростей вращения ротора и магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах. Она изменяется в зависимости от режима работы, нагрузки на валу и питающего напряжения. Учитывая важность вышесказанного в данной работе рассмотрена подробность о скольжение асинхронных двигателей и от чего оно зависит и как определяется совершенно простым путем.
Скольжение может измеряться в относительных единицах и в процентах. Она изменяется в зависимости от режима работы, нагрузки на валу и питающего напряжения. Учитывая важность вышесказанного в данной работе рассмотрена подробность о скольжение асинхронных двигателей и от чего оно зависит и как определяется совершенно простым путем.
Литература:
1. Маджидов А.Ш. Уравнения асинхронного электродвигателя при переходном процессе / А.Ш. Маджидов // Информационные технологии, энергетика и экономика (электроэнергетика, электротехника и теплоэнергетика, математическое моделирование и информационные технологии в производстве): сборник трудов XVII Международной научно-технической конференции студентов и аспирантов, Смоленск, 16–17 апреля 2020 г. / ФГБОУ ВО «НИУ «МЭИ», филиал в г. Смоленске. – Смоленск: Универсум, 2020. – С. 44–49.
2. Abdullo M. Features of the mathematical equations of asynchronous motors in the transient process / M. Abdullo, K. Nurzat. – April 22–23, 2021. – P. 116–121.
– P. 116–121.
3. Маджидо А.Ш. Учет асинхронного электродвигателя с неизменным скольжением при внезапном трехфазном коротком замыкании / А.Ш. Маджидов, Г.М. Султаналиева, Э.М. Султаналиева // Актуальные проблемы современной науки: взгляд молодых ученых: Материалы Международной научно-практической конференции. Материалы круглого стола, Грозный, 29–30 мая 2020 г. – Грозный: Чеченский государственный педагогический университет, 2020. – С. 651–657.
4. Majidov A. Investigation of the Self-Starting Process of a Low-Power Asynchronous Motor / A. Majidov, A.G. Kayumov, S. Hafizov //Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus 2021, Moscow, January 26–28, 2021. – Moscow, 2021. – P. 1462–1468. – DOI: 10.1109/ElConRus51938.2021.9396181.
5. Маджидов А.Ш. Сравнение методов определения энергоэффективности асинхронных двигателей / А.Ш. Маджидов, А.З. Джавахян // XI Международная интернет-конференция молодых ученых, аспирантов и студентов «Инновационные технологии: теория, инструменты, практика» (InnoTech-2019). – Пермь, 2019. – С. 163–167.
– Пермь, 2019. – С. 163–167.
6. Маджидов А.Ш. Особенности выбора асинхронных двигателей с короткозамкнутым ротором по пусковым характеристикам / А.Ш. Маджидов, Н.К. Каныбекова // Информационные технологи, энергетика и экономика (электроэнергетика, электротехника и теплоэнергетика, математическое моделирование и информационные технологии в производстве): сборник трудов XVIII Международной научно-технической конференции студентов и аспирантов: в 3 т., Смоленск, 22–23 апреля 2021 г. – Смоленск: Универсум, 2021. – С. 206–212.
7. Маджидов А.Ш. Анализ пусковых характеристик асинхронного двигателя с учетом изменения скорости вращения / А.Ш. Маджидов // Научная инициатива иностранных студентов и аспирантов: сборник докладов I Международной научно-практической конференции. В 2 т., Томск, 27–29 апреля 2021 г. – Томск: Национальный исследовательский Томский политехнический университет, 2021. – С. 178–187.
8. Маджидов А.Ш. Моделирование асинхронного двигателя на основе схемы замещения в программе ETAP / А. Ш. Маджидов // Энергетика, информатика, инновации – 2020: Сборник трудов X Национальной научно-технической конференции с международным участием. В 3 т., Смоленск, 3–4 декабря 2020 г. – Смоленск: Универсум, 2020. – С. 301–306.
Ш. Маджидов // Энергетика, информатика, инновации – 2020: Сборник трудов X Национальной научно-технической конференции с международным участием. В 3 т., Смоленск, 3–4 декабря 2020 г. – Смоленск: Универсум, 2020. – С. 301–306.
9. Majidov A. Comparative Study of Calculation Methods for Short-Circuit Currents in Low-Voltage Networks with Asynchronous Motors / A. Majidov, A.G. Kayumov, N. Kholov // Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus 2021, Moscow, January 26–28, 2021. – Moscow, 2021. – P. 1469–1475. – DOI 10.1109/ElConRus51938.2021.9396624.
10. Mathematical modeling of asynchronous motors for calculating short-circuit currents / A. Majidov, S. Hafizov, T. Isaev [et al.] // Proceedings of the 3rd 2021 International Youth Conference on Radio Electronics, Electrical and Power Engineering, REEPE 2021: 3, Moscow, March 11–13, 2021. – Moscow, 2021. – P. 9388065. – DOI: 10.1109/REEPE51337.2021.9388065.
Вращение большинства механизмов собственных нужд (СН) электростанций и подстанций (ЭС и ПС) осуществляется с помощью электрических приводов, а именно – асинхронными двигателями (АД) с короткозамкнутым ротором, т.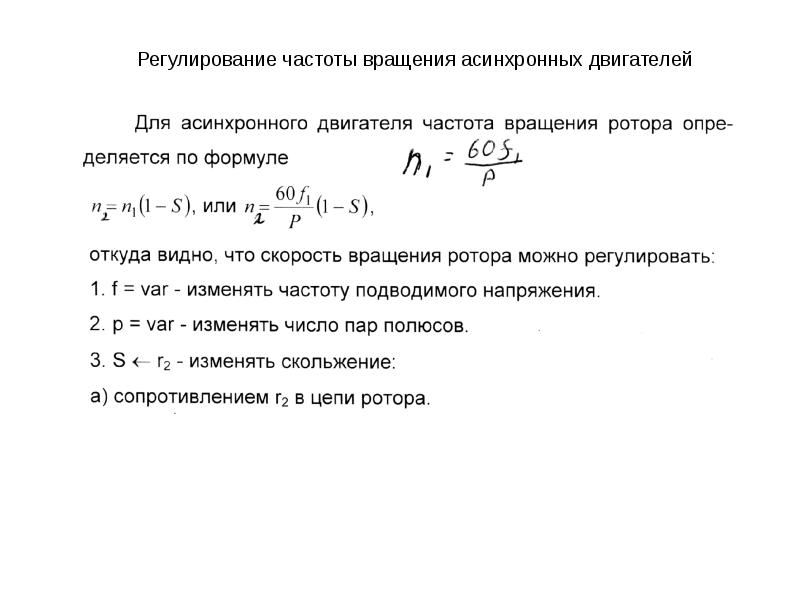 к. эти АД считаются самыми распространенными, которые дают возможность пуска от полного напряжения сети без специальных пусковых устройств. Другое преимущество этих АД – восстанавливать нормальный режим работы после глубоких понижений питающего напряжения, которые считаются самозапуском АД [1, 3, 5].
к. эти АД считаются самыми распространенными, которые дают возможность пуска от полного напряжения сети без специальных пусковых устройств. Другое преимущество этих АД – восстанавливать нормальный режим работы после глубоких понижений питающего напряжения, которые считаются самозапуском АД [1, 3, 5].
Для механизмов СН ЭС и ПС важно рассчитать токи и напряжение на выводах АД при различных механических нагрузках. Расчет статического режима разветвленной электрической цепи решается методами теории цепей [2, 4] и путем определения расчетного сопротивления АД в цепи. Эти АД в схеме представлены Т-образными или Г-образными схемами замещения [6, 7, 9], которая показана на рис. 1.
Уравнениям ЭДС и токов соответствует эквивалентная схема замещения, как показано на рис. 1. Таким образом, сложную магнитную цепь АД можно заменить электрической схемой. Сопротивление r’2 /s можно рассматривать как внешнее сопротивление, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению нагрузки на валу АД и приводит к изменению s. Тогда не сложно угадать, что скольжение АД в зависимости от нагрузки меняется незначительно (1–6%) [8]. Чем больше мощность АД, тем меньше его s.
Изменение этого сопротивления эквивалентно изменению нагрузки на валу АД и приводит к изменению s. Тогда не сложно угадать, что скольжение АД в зависимости от нагрузки меняется незначительно (1–6%) [8]. Чем больше мощность АД, тем меньше его s.
Определение эквивалентного сопротивления этих цепей в основном поддерживается необходимостью определения расчетного скольжения АД, которое в простейшем случае представляет собой функцию механической нагрузки (момент сопротивления вращению рабочей машины), амплитуду, частоту и напряжение на обмотке статора [10]. На скольжение могут влиять несимметричность трехфазного напряжения, несинусоидальное напряжение, случайные изменения механической нагрузки [2, 6, 9]. Погрешность определения скольжения 0,001 отн. ед. приводит к значительному увеличению погрешности конечных результатов расчета электрических цепей из-за накопления ошибок в многодвигательном приводе, а также к итерационным расчетам при использовании совместно с методами численных расчетов, при которых накапливается ошибка вычислений.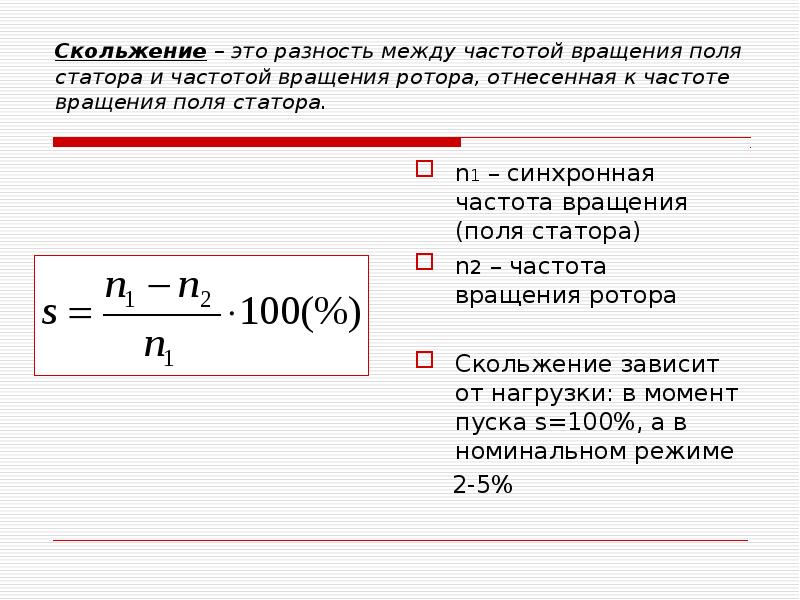
Для Цитирования:
Маджидов А. Ш., Особенности определение скольжения асинхронного двигателя классическим методом. Электрооборудование: эксплуатация и ремонт. 2022;1.
Полная версия статьи доступна подписчикам журнала
Для Цитирования:
Маджидов А. Ш., Особенности определение скольжения асинхронного двигателя классическим методом. Электрооборудование: эксплуатация и ремонт. 2022;1.
ФИО
Ваш e-mail
Ваш телефон
Нажимая кнопку «Получить доступ» вы даёте своё согласие обработку своих персональных данных
Ваше имя
Ваша фамилия
Ваш e-mail
Ваш телефон
Придумайте пароль
Пароль еще раз
Запомнить меня
Информируйте меня обо всех новостях и спецпредложениях по почте
На указанный Вами номер телефона был отправлен код подтверждения.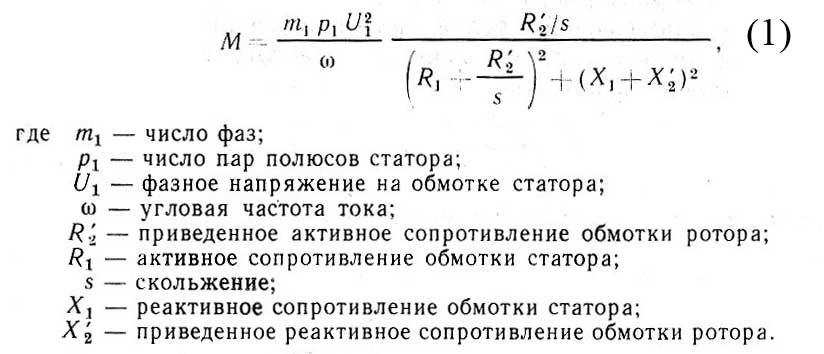
Повторно запросить код можно будет через секунд.
Код подтверждения
На указанный Вами номер телефона был отправлен код подтверждения.
Повторно запросить код можно будет через секунд.
Код подтверждения
На указанный Вами номер телефона был отправлен код подтверждения.
Повторно запросить код можно будет через секунд.
Код подтверждения
Логин
Пароль
Ваше имя:
Ваш e-mail:
Ваш телефон:
Сообщение:
На сайте используется защита от спама reCAPTCHA и применяются
Условия использования
и Конфиденциальность Google
Использовать это устройство?
Одновременно использовать один аккаунт разрешено только с одного устройства.
На указанный Вами номер телефона был отправлен код подтверждения.
Повторно запросить код можно будет через секунд.
Код подтверждения
×
Мы перевели вас на Русскую версию сайта
You have been redirected to the Russian version
Мы используем куки
Электротехника
Электротехника
Оглавление
|
 Приведены основные правила работы в учебной электротехнической лаборатории.
Приведены основные правила работы в учебной электротехнической лаборатории.
 17. СИМВОЛИЧЕСКИЙ МЕТОД
17. СИМВОЛИЧЕСКИЙ МЕТОД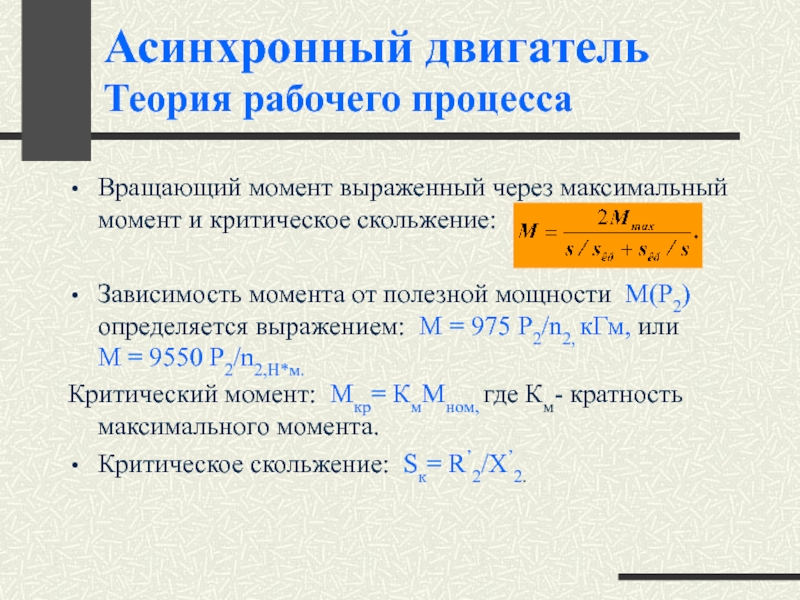 21. ПОНЯТИЕ ОБ ИЗМЕРЕНИЯХ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН ЭЛЕКТРИЧЕСКИМИ МЕТОДАМИ
21. ПОНЯТИЕ ОБ ИЗМЕРЕНИЯХ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН ЭЛЕКТРИЧЕСКИМИ МЕТОДАМИ 1. КЛАССИФИКАЦИЯ МАШИН ПЕРЕМЕННОГО ТОКА
1. КЛАССИФИКАЦИЯ МАШИН ПЕРЕМЕННОГО ТОКА 20. ОБРАТИМОСТЬ СИНХРОННЫХ МАШИН. ПРИНЦИП РАБОТЫ СИНХРОННОГО ДВИГАТЕЛЯ
20. ОБРАТИМОСТЬ СИНХРОННЫХ МАШИН. ПРИНЦИП РАБОТЫ СИНХРОННОГО ДВИГАТЕЛЯ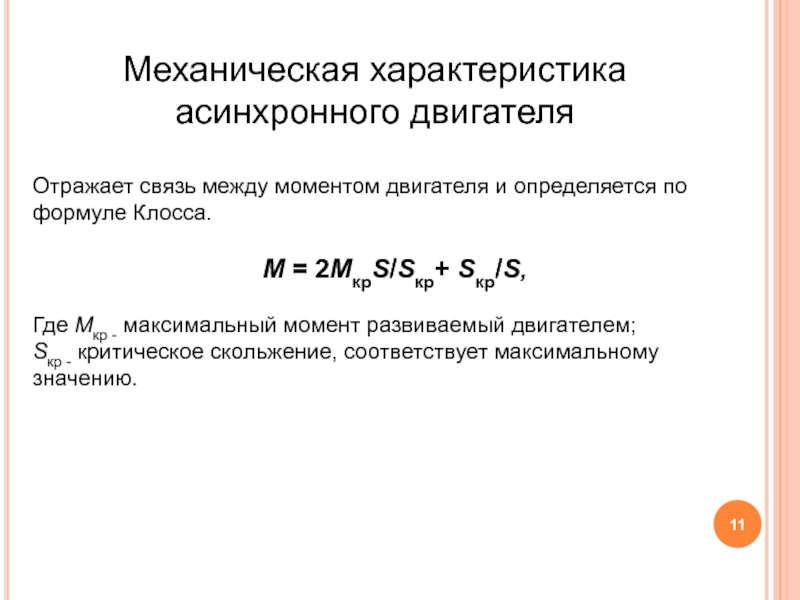 6. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
6. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
Какое значение имеет скольжение в асинхронном двигателе?
Асинхронный двигатель не может работать, если нет скольжения.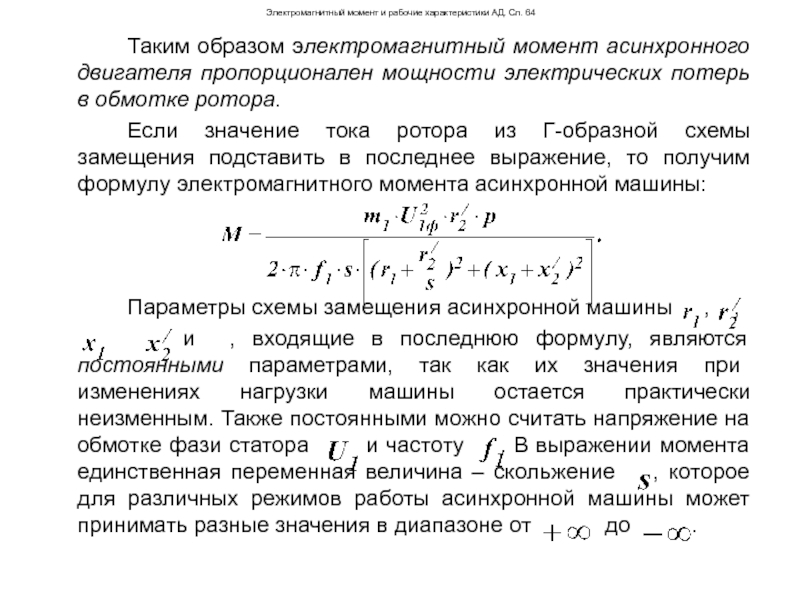 Что такое скольжение асинхронного двигателя? давайте сначала поймем скольжение асинхронного двигателя.
Что такое скольжение асинхронного двигателя? давайте сначала поймем скольжение асинхронного двигателя.
Что такое скольжение?
Когда асинхронный двигатель питается от трехфазной сети, создается вращающееся магнитное поле. Скорость вращающегося магнитного поля известна как синхронная скорость (Ns) двигателя. Магнитное поле, создаваемое в двигателе, связывается с проводниками ротора, которые замыкаются концевыми кольцами.
Поток, связанный с проводниками ротора, индуцирует напряжение в роторе, и поскольку проводники ротора замыкаются накоротко, ток начинает течь через проводники ротора. Благодаря взаимодействию между магнитным полем и током ротора создается крутящий момент, и ротор начинает вращаться. Пусть скорость вращения ротора равна N.
В асинхронном двигателе скорость вращения ротора всегда отстает от синхронной скорости вращающегося магнитного поля. Асинхронный двигатель называется асинхронным двигателем, потому что фактическая скорость двигателя всегда меньше синхронной скорости двигателя.
Разница между скоростью вращающегося магнитного поля или синхронной скоростью и фактической скоростью ротора или двигателя называется скольжением двигателя. Скольжение можно математически выразить как;
с = Ns – N
Скольжение в об/мин.
Проскальзывание в процентах,
Например:
4 полюса, асинхронный двигатель 50 Гц, 1480 об/мин при полной нагрузке.
Синхронная скорость двигателя
Ns = 120f/P
= 120 x 50/4
Ns = 1500 об/мин
с = Ns -N
= 1500–1480
с = 20 об/мин -1480) /1500] x 100
= [20/1500] x 100
% Slip = 1,33 %
Подробнее: Индукционный мотор. работа асинхронного двигателя?
Крутящий момент возникает при протекании тока в проводнике ротора. Если скольжение равно нулю, в проводнике ротора не будет индуцироваться ЭДС, и, следовательно, в цепи ротора не будет протекать ток.
Крутящий момент создается за счет взаимодействия основного потока и тока ротора. Если ток ротора равен нулю, двигатель не будет создавать крутящий момент. При отсутствии скольжения работа двигателя невозможна. Крутящий момент, создаваемый асинхронным двигателем, пропорционален скольжению. Уравнение крутящего момента асинхронного двигателя приведено ниже.
Из приведенного выше уравнения крутящего момента асинхронного двигателя видно, что если скольжение равно нулю, крутящий момент будет равен нулю. Когда нагрузка на двигатель увеличивается, скольжение увеличивается, а скорость двигателя немного снижается, поэтому двигатель обеспечивает более высокий крутящий момент для привода нагрузки.
Скольжение играет очень важную роль в работе асинхронного двигателя. На холостом ходу скольжение асинхронного двигателя меньше и увеличивается с увеличением нагрузки на двигатель. Скольжение двигателя саморегулируется в соответствии с требованиями крутящего момента со стороны нагрузки.
Скольжение определяет другие параметры асинхронного двигателя.
ЭДС, индуцированная ротором
ЭДС, индуцированная в роторе, прямо пропорциональна скольжению. В состоянии покоя скольжение равно единице, а индуцированное ротором напряжение максимально.
E 2 (R) ∝ (NS-N)
∝ S (S = NS-N)
E 2 (R) = S E 2
Где
E 2
sE 2 — ЭДС ротора/ Фаза в состоянии покоя
В состоянии покоя
s= (Ns – N)/ Ns = (Ns -0)/Ns = 1
, значит, E 2(r) = s E 2
E 2 (R) = 1 X E 2 = E 2
E 2 (R) = E 2
. равно максимальному напряжению ротора (OCV) или равно напряжению холостого хода ротора.
Частота ЭДС ротора
В условиях покоя частота ЭДС ротора равна частоте статора.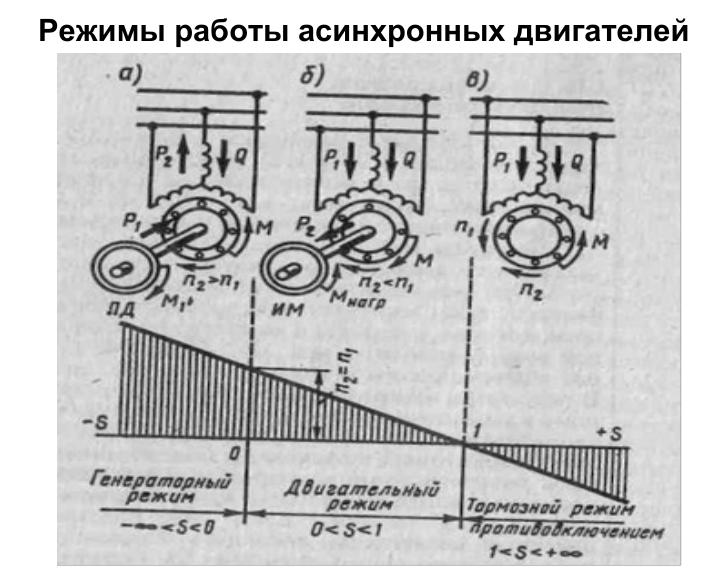 Частота ЭДС ротора уменьшается, когда двигатель начинает разгоняться, и частота минимальна, когда двигатель достигает номинальной скорости. Математическая связь между частотой ЭДС, индуцированной ротором, и частотой статора приведена ниже.
Частота ЭДС ротора уменьшается, когда двигатель начинает разгоняться, и частота минимальна, когда двигатель достигает номинальной скорости. Математическая связь между частотой ЭДС, индуцированной ротором, и частотой статора приведена ниже.
F R = SF S
Слип. 1
Следовательно, в состоянии покоя
f r =f s
Сопротивление ротора
Сопротивление ротора не зависит от скольжения и, следовательно, сопротивление ротора остается постоянным независимо от скорости двигателя.
Ч 2 = Постоянная
Реактивное сопротивление ротора
Реактивное сопротивление ротора уменьшается с увеличением скорости двигателя. Реактивное сопротивление ротора наименьшее, когда двигатель работает на номинальной скорости. В состоянии покоя скольжение равно единице, а частота ЭДС ротора равна частоте питающей сети.
Пусть реактивное сопротивление ротора равно X 2 .
X 2 = ω L 2
, где,
ω = 2π F R
L 2 = Индуктивность ротора
Следовательно,
x 2 = 2π FR L 2
x 2 = 2
X 2 2 2 2 2 2
2 2 . L 2 [ As fr =fs, в состоянии покоя]
Индуцированная ротором частота в рабочем состоянии зависит от скольжения двигателя.
В рабочем состоянии,
f r =sf s
Реактивное сопротивление ротора в рабочем состоянии будет равно;
X 2r = 2πs f r L 2
= s ( 2π f r L 2 )
X 2r =s X 2
Полное сопротивление ротора
Полное сопротивление/фаза ротора в состоянии покоя приведены ниже.
Импеданс/фаза ротора в рабочем состоянии приведены ниже.
Где,
Коэффициент мощности ротора
Импеданс, сопротивление и треугольник реактивного сопротивления цепи ротора приведены ниже.
Коэффициент мощности ротора в состоянии покоя указан ниже.
В рабочем режиме коэффициент мощности цепи ротора составляет ;
Наглядные примеры скольжения асинхронного двигателя:
Если ЭДС индукции в 4-полюсном статоре имеет частоту 50 Гц, а в роторе 1,5 Гц, то на какой скорости работает двигатель и каково скольжение асинхронного двигателя ?
fr = 50 Гц
P = 4
N с = 120F/P
= 120 x 50/4
N S = 1500 об/мин
F R = частота статора Slip x
1,5 = S x 50
S = 1,5/50
с = 0,03
двигателя
N = Ns(1 – s )
= 1500(1 – 0,03 )
= 1500 x 0,97
N = 1455 об/мин ротор , соединенный звездой. Скорость двигателя при полной нагрузке составляет 1460 об/мин. Сопротивление ротора и реактивное сопротивление покоя на фазу составляют 0,1 Ом и 1,5 Ом соответственно. Напряжение холостого хода на холостом ходу между контактными кольцами составляет 9 В.0 вольт. Определите (i) процентное скольжение (ii) ЭДС индукции в роторе на фазу (iii) реактивное сопротивление ротора на фазу при полной нагрузке (iv) ток ротора и коэффициент мощности при полной нагрузке.
Скорость двигателя при полной нагрузке составляет 1460 об/мин. Сопротивление ротора и реактивное сопротивление покоя на фазу составляют 0,1 Ом и 1,5 Ом соответственно. Напряжение холостого хода на холостом ходу между контактными кольцами составляет 9 В.0 вольт. Определите (i) процентное скольжение (ii) ЭДС индукции в роторе на фазу (iii) реактивное сопротивление ротора на фазу при полной нагрузке (iv) ток ротора и коэффициент мощности при полной нагрузке.
(i) Ns = 120f/p
= 120 x 50/4
= 1500 об/мин;
скольжение = (Ns – N) / Ns
= (1500 – 1460)/ 1500
= 0,0266 %
ЭДС ротора при полной нагрузке E r = SE 2
= 0,0266 x 51,96
= 1,382 Вольт
(III) Реактивное сопротивление ротора на стойке.
(IV) Импеданс ротора на фазу при полной нагрузке
Z 2 = √ (R 2 2 + SX 2 2 )
= 0,1077 ОТ
Ротор. Текущий текущий на фазу на фазу = 1,382/0.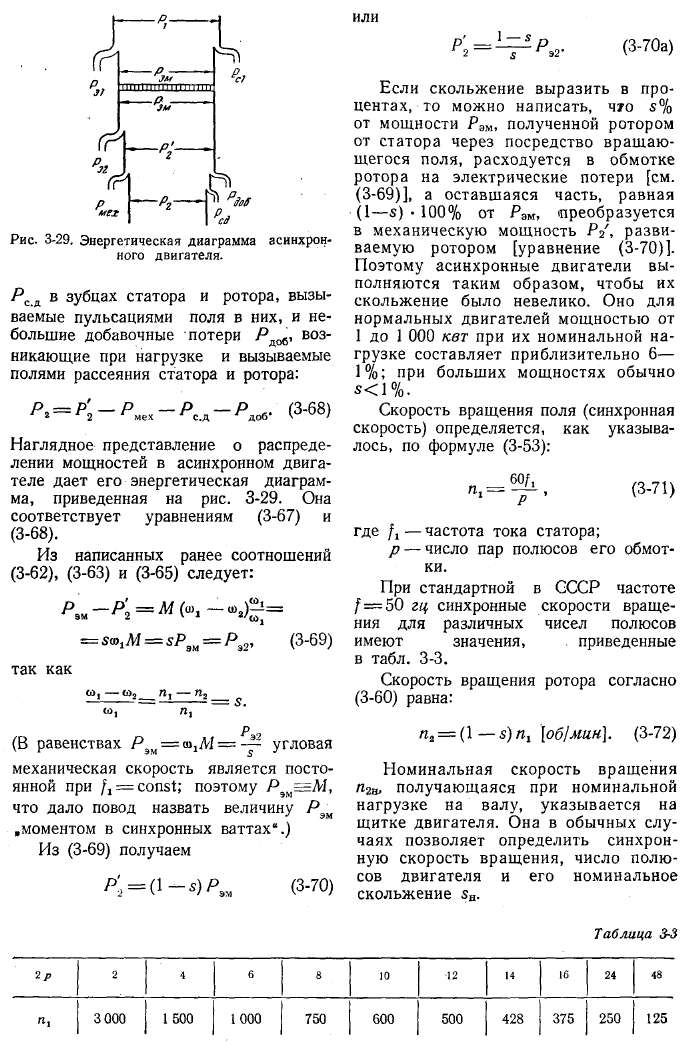 107/0.107/0.107/0.107/0.107/0.107. 12,83 А
107/0.107/0.107/0.107/0.107/0.107. 12,83 А
Коэффициент мощности при полной нагрузке = R2/Z2
= 0,1/0,1077
= 0,929
Трехфазный асинхронный двигатель с контактными кольцами имеет ротор, соединенный звездой. ЭДС 60 вольт при разомкнутой цепи возникает между контактными кольцами в состоянии покоя при номинальном напряжении статора. Сопротивление и реактивное сопротивление покоя ротора на фазу составляют 0,5 Ом и 5 Ом соответственно. Определите ток ротора по фазе (i), когда ротор находится в состоянии покоя и подключен к соединенному звездой реостату с сопротивлением 5 Ом и реактивным сопротивлением 0,5 Ом на фазу. (ii) при работе со скольжением 4 % при короткозамкнутом реостате.
Ток через ротор в состоянии покоя = ток при пуске Поскольку внешние сопротивления включаются последовательно с ротором, имеющим сопротивление и реактивное сопротивление на фазу R 2 = 5,5 Ом; X 2 = 5,5 Ом соответственно.
(I) I 2 = E 2 / √ (R 2 2 +x 2 2 )
= (60 / √ 3) / √ (5,5) 2 2 2966 2 2966 2 246 2966 2966 2 2 2 2 2966 2 9017. + (5,5) 2 )
+ (5,5) 2 )
I 2 = 4,454 ампер
(ii) При работе со скольжением 4%
I 2 = SE 2 / √ (R 2 2 + (SX 2 2 ))
= (0,04 x 60 / √ 3) / √ (0,5) 2 2 9036 2 2 2 2 2 2 2 2 2 2 9017. + (0,04 x 5) 2 ))
= 2,573 А
Трехфазный 12-полюсный явнополюсный генератор переменного тока соединен с дизельным двигателем, работающим со скоростью 500 об/мин. Он питает асинхронный двигатель, который имеет скорость полной нагрузки 1440 об/мин. Найдите процент скольжения и число полюсов асинхронного двигателя.
Частота питания асинхронного двигателя
f = pn/120
= 12 x 500 / 120
= 50 Гц
Скорость асинхронного двигателя = 1440 об/мин,
Число полюсов асинхронного двигателя = p = 120 f / n
= 120 x 50/1440
= 4,16
Число полюсов должно быть четным, выбирая ближайшее четное число как число полюсов p = 4
Синхронная скорость асинхронного двигателя
Ns = 120f/p
= 120 x 50/4 = 1500 об/мин
скольжение = (Ns – N) / Ns
= (1500 – 1440)/ 1500
= 0,04 Процентное скольжение = 4 %
Связанный пост
- Интервью с асинхронным двигателем Вопросы и ответы Часть 2
- Почему асинхронный двигатель потребляет большой пусковой ток?
- Почему трехфазным асинхронным двигателям не нужна нейтраль?
- Трехфазный асинхронный двигатель с самозапуском
- Почему асинхронный двигатель является двигателем почти с постоянной скоростью?
Похожие посты:
Подпишитесь на нас и поставьте лайк:
Что такое скольжение в асинхронном двигателе?
от администратора
Скольжение в асинхронном двигателе — это относительная скорость между вращающимся магнитным потоком и ротором, выраженная в единицах синхронной скорости. Это безразмерная величина. Значение скольжения в асинхронном двигателе никогда не может быть равно нулю.
Если N s и N r — синхронная скорость вращения магнитного потока и скорость ротора соответственно, то относительная скорость между ними равна (Ns — Nr). Следовательно, скольжение определяется как
Скольжение (с) = (Ns – Nr) / Ns
Поскольку мы знаем, что скорость ротора не может быть равна синхронной скорости, т.е. Nr < Ns, значение скольжения s всегда меньше единицы. Для асинхронного двигателя 0 При подключении трехфазного источника питания к трехфазной обмотке статора асинхронного двигателя в воздушном зазоре создается вращающееся магнитное поле. Скорость этого вращающегося магнитного поля называется синхронной скоростью. Синхронная скорость определяется количеством полюсов (P) и частотой (f) источника питания. Синхронная скорость равна N = 2f/P об/с (оборот в секунду).
Синхронная скорость равна N = 2f/P об/с (оборот в секунду).
Это вращающееся магнитное поле разрезает проводники стационарного ротора, создавая ЭДС. Поскольку цепь ротора короткозамкнута, эта генерируемая ЭДС приводит к возникновению тока ротора. Взаимодействие этого тока ротора с вращающимся магнитным потоком создает крутящий момент, и, следовательно, ротор начинает вращаться в направлении вращающегося магнитного поля по закону Ленца. Следовательно, между ними устанавливается относительная скорость, равная (N s – N r ), что вызывает скольжение асинхронного двигателя.
Почему скольжение в асинхронном двигателе никогда не равно нулю?
Нулевое скольжение означает, что скорость ротора равна синхронной скорости. Если ротор вращается с синхронной скоростью в направлении вращающегося магнитного поля, то не будет ни действия срезания потока, ни ЭДС в проводниках ротора, ни тока в проводнике стержня ротора и, следовательно, не будет развития электромагнитного момента. Таким образом, ротор трехфазного асинхронного двигателя никогда не сможет достичь синхронной скорости. Следовательно, в асинхронном двигателе скольжение никогда не равно нулю.
Таким образом, ротор трехфазного асинхронного двигателя никогда не сможет достичь синхронной скорости. Следовательно, в асинхронном двигателе скольжение никогда не равно нулю.
Различные значения скольжения и их значение:
Значение скольжения в асинхронных машинах приведено в таблице ниже. Поведение асинхронной машины сильно зависит от величины скольжения.
| Величина проскальзывания (с) | Значение |
| с = 0 (нулевое скольжение) | Нулевое скольжение означает, что скорость ротора равна синхронно вращающемуся магнитному потоку. При этом условии не будет никакого относительного движения между катушками ротора и вращающимся магнитным потоком. Таким образом, не будет никакого действия, отсекающего поток катушек ротора. Следовательно, в катушках ротора не будет генерироваться ЭДС для создания тока ротора. Это означает, что электромагнитный момент не будет создаваться. Асинхронный двигатель не будет работать. Поэтому для асинхронного двигателя очень важно иметь положительное значение скольжения. Это причина; скольжение никогда не равно нулю в асинхронном двигателе. Асинхронный двигатель не будет работать. Поэтому для асинхронного двигателя очень важно иметь положительное значение скольжения. Это причина; скольжение никогда не равно нулю в асинхронном двигателе.
|
| с = 1 (скольжение равно 1) | Скольжение = 1, означает, что ротор неподвижен. |
| с = отрицательное (отрицательное скольжение) | Отрицательное значение скольжения в асинхронном двигателе может быть достигнуто, когда скорость вращения ротора больше, чем синхронно вращающийся магнитный поток. Это возможно только при вращении ротора в направлении вращающегося магнитного потока каким-либо первичным двигателем. В этом случае машина работает как индукционный генератор. Подробнее см. Характеристики проскальзывания крутящего момента. |
| с > 1 (скольжение больше 1) | Скольжение более 1 означает, что ротор вращается в направлении, противоположном направлению вращения магнитного потока. Это означает, что если магнитный поток вращается по часовой стрелке, то ротор вращается против часовой стрелки или наоборот.
|