Содержание
Управление шаговым двигателем: способы управления
Статьи
Шаговые двигатели являются неотъемлемой частью самых различных электромеханизмов, начиная от бытовой техники и заканчивая производственным оборудованием. Управление шаговым двигателем осуществляется с помощью внешнего оборудования, в качестве которого может выступать как простой контроллер ШД, так и сложная система во главе с ПК, к которому подключается блок управления шаговым двигателем.
Способы управления шаговым двигателем
Независимо от того, какая схема управления использована, управление шаговым двигателем может осуществляться в одном из трёх режимов:
– полношаговом;
– полушаговом;
– микрошаговом.
Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз. При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза; точки равновесия ротора идентичны полюсам статора. Данный режим имеет недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы.
При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза; точки равновесия ротора идентичны полюсам статора. Данный режим имеет недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы.
Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза. При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, между шагами включаются сразу обе. Такой режим коммутации очень популярен, однако следует отметить, что при его применение получение полного момента невозможно.
Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора. При работе в таком режиме, как и в полушаговом, работают две фазы, однако токи обмоток в данном случае распределяются неравномерно. В микрошаговом режиме шагового двигателя происходит смещение положения ротора и магнитного поля статора между полюсов. Величина микрошага зависит от конкретного устройства, составляя от трети полного шага и менее. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако коммутация несколько усложняется.
При работе в таком режиме, как и в полушаговом, работают две фазы, однако токи обмоток в данном случае распределяются неравномерно. В микрошаговом режиме шагового двигателя происходит смещение положения ротора и магнитного поля статора между полюсов. Величина микрошага зависит от конкретного устройства, составляя от трети полного шага и менее. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако коммутация несколько усложняется.
Купить шаговые двигатели и средства управления ШД в Stepmotor
В каталоге Stepmotor представлен широчайший ассортимент шаговых двигателей, а также систем управления шаговыми двигателями. Если вам необходимо купить шаговый двигатель, контроллер шагового двигателя или блок управления шаговым двигателем в наличии по доступней цене, удобнее всего оформить заказ на нашем сайте. Обратите внимание: используйте только те модели коммутационных устройств, которые совместимы с выбранной вами моделью ШД! Если вы не знаете, как выбрать контроллер для шагового двигателя, проконсультируйтесь у технического специалиста, позвонив по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.
Купите шаговый двигатель и коммутатор шагового двигателя в Stepmotor. Все шаговые двигатели, блоки управления и драйверы ШД есть в наличии, отгрузка сразу после оплаты. Звоните 8 800 5555 068.
Ai-M-60LA Замкнутая Система Управления с Шаговым Двигателем
- Главная
- Каталог
- Комплектующие для станков
- Замкнутая система управления с шаговым двигателем
Под заказ
Ai-M-60LA Замкнутая Система Управления с Шаговым Двигателем
2-фазные шаговые двигатели с замкнутым контуром
Ремстанмаш официальный партнёр Autonics
Характеристики
- Тип
- Двигатель
- Поз.

- Искусственный интеллект
- Длина двигателя
- 119,8 мм
- Категория
- Двигатель
Техническое описание
| Базовый угол (шаг) электродвигателя [полный/половинный] | 1,8º/0,9º |
|---|---|
| Макс. удерживающий момент | 29.57кгс.см |
| Момент инерции ротора электродвигателя | 690 |
| Сопротивление обмотки | 1,3 Ом |
| Номинальный ток | 3,5 А/фазу |
| Длина двигателя | 119,8 мм |
| Тип вала | Один вал |
| Рабочий режим | биполярный |
| Разрешение | 500 (значение по умолчанию, устанавливаемое на заводе-изготовителя), 1000, 1600, 2000, 3200, 3600, 5000, 6400, 7200, 10 000 имп. ) ) |
| Макс. частота отклика | 300 |
| Степень защиты | IP30 |
| Количество фаз двигателя | 3-х фазная (2-х полюсная) |
| Количество осей | 1 ось |
| Температура окружающей среды | 0…+50℃, при хранении: -20…+70℃ |
| Влажность окружающей среды | Относительная влажность 35-85%, при хранении: 10-90% |
| Масса | Прибл. 1,58 кг (прибл. 1,44 кг) |
● Макс. момент удержания – это стандартный крутящий момент, возникающий при номинальном токе (2-фазное удержание) при затормаживании двигателя и используемый для сравнения технических характеристик разных двигателей.● Вес указан с учетом веса упаковки. В скобках указан вес устройства без упаковки.
Оставить свой отзыв
Оценка
Отправляю данную форму, даю согласие на обработку персональных данных
Ваше имя
Номер телефона
Управление шаговым двигателем
Шаговый двигатель преобразует последовательность входных импульсов в точно определенное приращение положения механического вала, при этом каждый импульс перемещает вал на фиксированный угол. Затем можно дать команду двигателю перемещаться и удерживаться на одном из этих шагов без какого-либо датчика обратной связи (т. Е. Управление шаговым двигателем с разомкнутым контуром), если размер двигателя тщательно подобран для применения в отношении крутящего момента и скорости. Управление шаговым двигателем обеспечивает эту входную последовательность импульсов, чтобы заставить двигатель двигаться в нужное положение или с нужной скоростью.
Затем можно дать команду двигателю перемещаться и удерживаться на одном из этих шагов без какого-либо датчика обратной связи (т. Е. Управление шаговым двигателем с разомкнутым контуром), если размер двигателя тщательно подобран для применения в отношении крутящего момента и скорости. Управление шаговым двигателем обеспечивает эту входную последовательность импульсов, чтобы заставить двигатель двигаться в нужное положение или с нужной скоростью.
Приводы постоянного напряжения с управлением шаговым двигателем используются для подачи постоянного положительного или отрицательного напряжения на каждую обмотку для управления движением. Однако именно ток обмотки, а не напряжение, прикладывает крутящий момент к валу шагового двигателя. Ток (I) в каждой обмотке связан с приложенным напряжением (V) через индуктивность обмотки (L) и сопротивление обмотки (R). Таким образом, они также известны как приводы L/R. Для получения высокого крутящего момента на высоких скоростях требуется большое напряжение привода с малым сопротивлением и малой индуктивностью. С приводом L/R можно управлять низковольтным резистивным двигателем с приводом более высокого напряжения, просто добавляя внешний резистор последовательно с каждой обмоткой. Однако, поскольку он тратит энергию в резисторах и выделяет тепло, он считается малоэффективным вариантом.
С приводом L/R можно управлять низковольтным резистивным двигателем с приводом более высокого напряжения, просто добавляя внешний резистор последовательно с каждой обмоткой. Однако, поскольку он тратит энергию в резисторах и выделяет тепло, он считается малоэффективным вариантом.
Приводы постоянного тока генерируют постоянный ток в каждой обмотке вместо подачи постоянного напряжения. На каждом новом шаге к обмотке сначала прикладывается высокое напряжение, что вызывает быстрый рост тока в обмотке, поскольку dI/dt = V/L, где V велико. Ток в каждой обмотке контролируется контроллером шагового двигателя, обычно путем измерения напряжения на небольшом чувствительном резисторе, включенном последовательно с каждой обмоткой. Когда ток превышает заданный предел тока, напряжение отключается. Когда ток обмотки падает ниже заданного предела, снова включается напряжение. Таким образом, ток поддерживается относительно постоянным для определенного положения ступени. Это требует дополнительной электроники для определения токов обмотки и управления переключением, но позволяет управлять шаговыми двигателями с более высоким крутящим моментом на более высоких скоростях, чем приводы L/R.
Микрошаговые приводы Portescap обеспечивают существенные преимущества в виде повышенного разрешения системы, низкого уровня шума и плавного движения. Силовой каскад предназначен для двигателей с малой электрической постоянной времени и обеспечивает высокие динамические характеристики. Некоторые преимущества нашего микрошагового привода EDM-453 включают:
• Переключение разрешения от 1/2 до 1/64 микрошага
• Высокое угловое разрешение в статике и динамике
• Плавная работа, низкий уровень шума
• Режим форсирования для более высокого крутящего момента / выход ускорения
• Режим ожидания для оптимального управления теплом
• Режим управления инвертором, выбираемый между рекуперативным и свободным ходом
• Тактовая частота до 150 кГц
• Все входы оптоизолированы
• Защита от короткого замыкания и перегрева
Что такое шаговый двигатель
Содержание
Шаговые двигатели ничем не отличаются по своей конструкции, но их предпочтительное применение классифицирует их как совершенно отдельную категорию. Важно понимать, как они работают и чем они отличаются, поскольку иногда, на первый взгляд, они могут показаться сдвоенными версиями двигателей разных типов.
Важно понимать, как они работают и чем они отличаются, поскольку иногда, на первый взгляд, они могут показаться сдвоенными версиями двигателей разных типов.
Шаговый двигатель
Шаговый двигатель — это электрический двигатель, который преобразует энергию, протекающую через него, в круговое движение. Он работает на постоянном токе и может иметь практически любой размер или крутящий момент. Термин «шаговый двигатель» относится к шаговому двигателю, как следует из названия, когда он питается от обмоток, он делает один «шаг» вместо непрерывного вращения. Каждый шаг представляет собой однократное вращение на точно определенный производителем двигателя угол, например 1,2 градуса. Этот шаговый двигатель не имеет щеток, поэтому он относится к классу бесщеточных двигателей постоянного тока.
Возможно, шаговый двигатель не начнет вращаться при подключении к нему источника питания. Необходимо повернуть обмотки блока питания в правильной последовательности. Каждый переключатель активирует определенный угол (ранее упомянутый шаг).
Что может построить шаговый двигатель?
В отличие от щеточных двигателей постоянного тока. В этом шаговом двигателе ферромагнетик располагался в роторе, а обмотки в статоре. Это позволило полностью отказаться от механического коммутатора. Перемещение двигателя можно осуществить, чередуя питание между последовательными обмотками.
Конструкция шагового двигателя
Для постоянных магнитов ветер непосредственно контактирует с полюсами ротора, состоящего из магнитов. Если одна из обмоток находится под напряжением, генерируемое магнитное поле воздействует на ротор и заставляет его вращаться под узким углом. После этого можно зажечь следующую обмотку, а затем еще раз прокрутить вал. Во многих случаях отталкивание между полюсами ротора используется одновременно из-за обратного направления источника питания. То есть одни ветры «притягивают», а другие «толкают» вращение ротора.
Магнит всегда может создать одну пару полюсов. Для шаговых двигателей внутри ротора могут быть дополнительные магниты. Кроме того, количество магнитных пар внутри ротора является другим фактором, который производитель определяет для своего двигателя.
Кроме того, количество магнитных пар внутри ротора является другим фактором, который производитель определяет для своего двигателя.
Двигатели с переменным сопротивлением, в которых ротор изготовлен из железного цилиндра с прорезями вместо магнита, работают иначе. Операция включает изменение ротора таким образом, чтобы сопротивление, также известное как «сопротивление» магнитному полю, было как можно минимальным. Это произойдет, когда выступающие части ротора (в форме «зубцов») совпадут с выступающими частями статора.
Двигатели с постоянными магнитами более мощные и имеют больший крутящий момент, а двигатели с переменным сопротивлением имеют более высокие скорости, они дешевле и тише. Неудивительно, что смесь этих двух технологий также проходит испытания. были разработаны гибридные двигатели, которые сочетают в себе преимущества обоих вариантов, но они дороже своих аналогов.
Каковы преимущества шаговых двигателей
Шаговые двигатели обладают значительным преимуществом перед щетками в ситуациях, когда требуется точное перемещение вала под углом, который устанавливается и поддерживается для обеспечения максимально возможного крутящего момента. Одним из примеров такой машины является фрезерное устройство с ЧПУ, в котором двигатели должны вращаться через вращающееся колесо (или фрезеруемый материал) с невероятной точностью, одновременно прикладывая давление от вращающегося резца к фрезеруемому объекту.
Одним из примеров такой машины является фрезерное устройство с ЧПУ, в котором двигатели должны вращаться через вращающееся колесо (или фрезеруемый материал) с невероятной точностью, одновременно прикладывая давление от вращающегося резца к фрезеруемому объекту.
Конечно, для этого можно использовать щеточные двигатели. Однако это потребует использования датчиков положения вала (энкодеров), а также передовых контроллеров, способных измерять ток, что значительно увеличивает стоимость. Более эффективно использовать шаговый двигатель, в котором движение вала можно точно контролировать даже без добавления датчиков. Это известно как управление без обратной связи, при котором отсутствует обратная связь относительно направления, в котором находится вал.
Результатом этого решения является не только возможность поворота на угол в определенный градус, но и возможность поддерживать очень низкие скорости без дополнительных механических передач.
Можно сконструировать часы со стрелкой, прикрепленной к валу шагового двигателя и вращающейся со скоростью один оборот каждый день, а затем начать считать секунды со скоростью 1,25 оборота в минуту. Если у вас есть другие моторы, реализовать эту идею может быть сложно.
Если у вас есть другие моторы, реализовать эту идею может быть сложно.
Наиболее значительным преимуществом является отсутствие подверженных износу компонентов (за исключением подшипников). Кроме того, при коммутации не возникает искрения, и его можно без опасений использовать, например, в средах, содержащих взрывоопасные газы, которые могут вызвать взрыв.
Каковы недостатки шаговых двигателей
Главный недостаток шаговых двигателей в том, что ими сложнее управлять, т.е. управлять правильной электронной коммутацией. Хотя можно использовать готовые контроллеры, их использование не так просто, как подключение питания непосредственно к проводам двигателя щетки. Неправильное управление приводит к неконтролируемому движению вращающегося вала и может привести к необратимому повреждению двигателя.
Шаговые двигатели работают как инерционные двигатели. Они пропускают, поскольку позволяют протекать по проводам столько тока, сколько может быть получено от конкретного источника питания. Вот почему важно следить за током, протекающим через него, и ограничивать его до максимального значения, иначе вы сожжете обмотки.
Вот почему важно следить за током, протекающим через него, и ограничивать его до максимального значения, иначе вы сожжете обмотки.
Еще одна проблема — жесткое ограничение максимальной скорости. Хотя для щеточных двигателей типична скорость в десятки или тысячи оборотов в минуту, скорость, превышающая 1000, не часто используется в шаговых двигателях. Кроме того, увеличение скорости может сделать ротор неэффективным, чтобы идти в ногу с вращающимся электромагнитным полем, что приводит к тому, что он перестает создавать крутящий момент и начинает колебаться при небольших колебаниях. Микрошаговое управление может дополнительно ограничить это, ограничивая максимальную скорость.
Другая проблема называется потерянными шагами. То есть, когда моторы не способны совершать движение с фиксированным углом, например, со слишком большим напряжением. Это серьезная проблема, если полагаться исключительно на управление без обратной связи. Контроллер для 3D-принтера мог «думать», что голова перемещается на 1 см, но на самом деле она находилась в неподвижном положении. Если он начнет свою работу и снова, остальная часть печати сместится на один сантиметр в одном направлении.
Если он начнет свою работу и снова, остальная часть печати сместится на один сантиметр в одном направлении.
Проблема может быть решена тремя различными способами. Вы можете увеличить размер используемого двигателя, т. е. выбрать двигатель с достаточным запасом крутящего момента. Кроме того, вы можете использовать отрицательную обратную связь для управления, например, включить энкодер. Кроме того, современные контроллеры имеют встроенную систему обнаружения пропущенных шагов. Таким образом, даже если этой проблемы нельзя избежать, по крайней мере, можно отреагировать, например, приостановив работу устройства или проинформировав пользователей о проблеме.
Контроллер шагового двигателя
При рассмотрении свойств шагового двигателя важно учитывать не только характеристики, обусловленные конструкцией двигателя, но и сам двигатель и систему управления в целом. Единственный фокус на моторе дает неполный образ. Система управления играет важную роль в формировании характеристик шаговых двигателей.
Основное развитие шаговых двигателей направлено на увеличение количества выполняемых ходов,
КПД и крутящий момент при одновременном снижении механической инерции. Шаги шагового привода определяются конструкцией и механическими характеристиками объекта и двигателя, а также магнитными и электрическими составляющими двигателя, способом обеспечения его обмоток и, наконец, алгоритмом управления.
Биполярное и униполярное управление шаговыми двигателями
Среди шаговых двигателей есть два основных типа: униполярные и биполярные.
а- однополярный, б – двухполюсный
Двухполюсный двигатель с двумя фазами имеет по одной обмотке на каждую фазу, тогда как однополярный двигатель имеет только одну обмотку на фазу, Обмотка, с отводом в центре. Существуют двигатели с двумя обмотками на каждую фазу. Они могут работать как в монополярном, так и в биполярном режимах. При включенном биполярном управлении в работе участвует весь диапазон обмотки, а при использовании однополярного управления одновременно активна половина диапазона.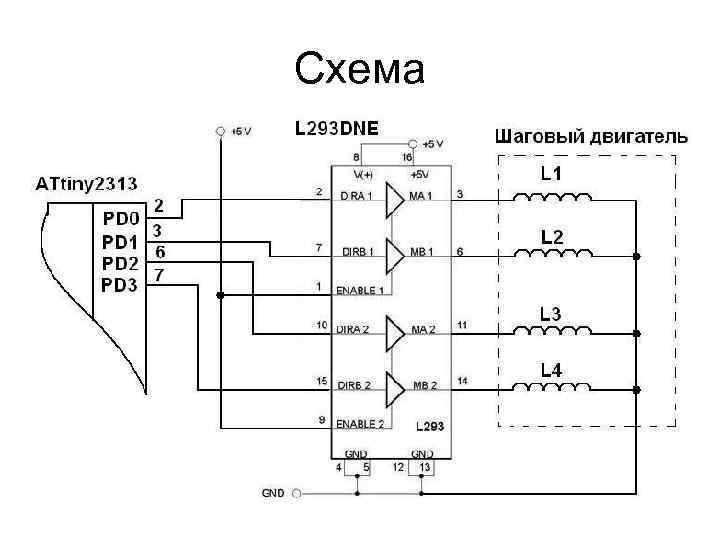
Методы управления двигателем: а) униполярный б) биполярный
В биполярном приводе использование двухпозиционного переключателя или двух транзисторов, которые включаются по циклу, может изменить магнитное поле внутри центра. В однофазном двигателе для управления током достаточно одного транзистора на фазу.
Однополярное управление позволяет току течь в обмотке только в одном направлении, тогда как биполярное управление гарантирует, что ток протекает в двух разных направлениях. Преимущество однополярной альтернативы в том, что она проще и содержит меньшее количество транзисторов. недостатком может быть то, что он работает только при одновременной работе половины обмотки, что означает, что полная сила крутящего момента не создается.
Преимуществом биполярного управления является высокий коэффициент использования крутящего момента, поскольку вся обмотка находится в том состоянии, в котором она находится при получении импульса.
Как правило, биполярные двигатели требуют более сложной системы управления.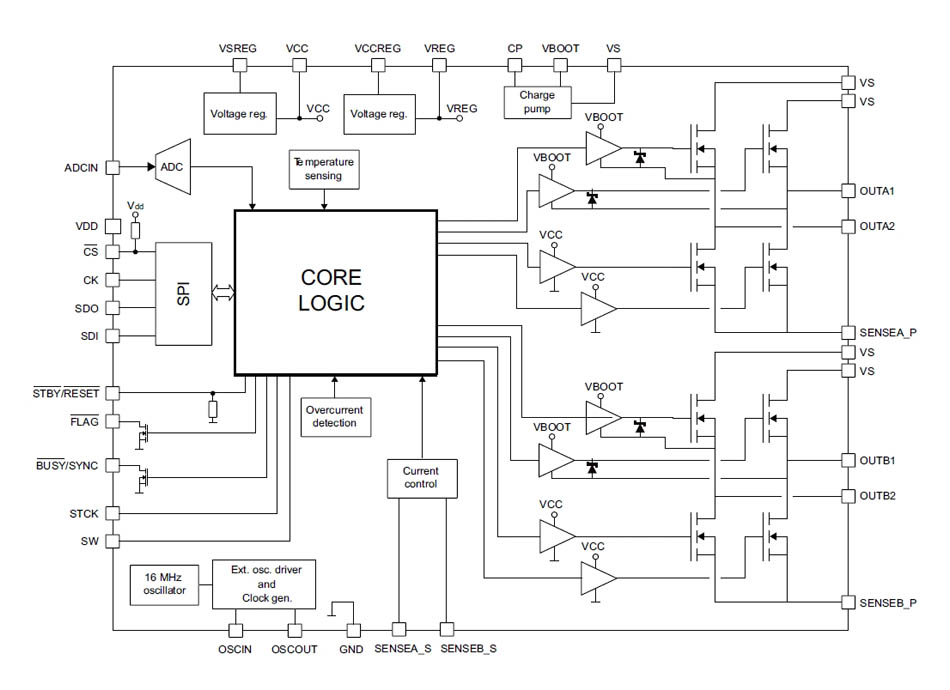 Эта проблема была решена с введением специальных силовых ИС, которые содержат два транзисторных моста, которые могут управлять важными токами.
Эта проблема была решена с введением специальных силовых ИС, которые содержат два транзисторных моста, которые могут управлять важными токами.
Управление формой волны
При управлении волной, также известном как однофазное управление, одна фаза находится под напряжением в любой момент времени. Порядок их работы A-B-A’-B’. Результатом этого вида управления является выполнение полного шага.
Положение вала двигателя для однофазного режима работы
Волновые двигатели называются униполярными двигателями. Это связано с количеством фаз двигателя, используемых одновременно. Для двигателей с однополярными и двухполюсными обмотками и одинаковыми параметрами обмотки этот тип питания вызывает одинаковое механическое движение.
Недостатком этого типа управления является то, что двигатели с однополярными обмотками потребляют всего 25%, а двигатели с биполярными обмотками потребляют 50% всей обмотки двигателя в любой момент времени.
Это означает, что максимальный крутящий момент двигателя не используется.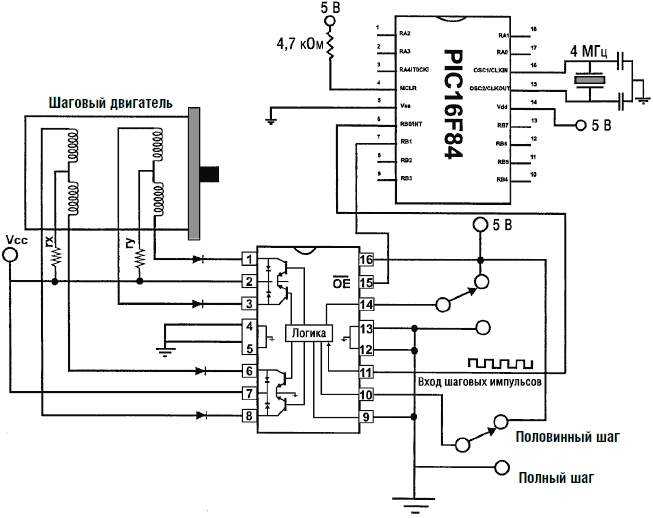
Полношаговое управление
При использовании двухфазного управления, также известного как полноступенчатое управление, две фазы активируются одновременно. Последовательность операций описывается как AB-A’B’. Результатом такой формы управления являются действия, идентичные действиям при однофазном управлении, за исключением того, что положение ротора изменяется на полшага.
Однако из-за того, что два двигателя работают одновременно, этот двигатель может развивать вдвое больший крутящий момент по сравнению с однофазным управлением, что эквивалентно 50 процентам общей обмотки.
Положение вала двигателя для полноходового (двухфазного) режима
При полношаговом управлении движения ротора такие же, как и при волновом управлении.
Полушаговое управление
Полушаговое управление сложнее, чем два других типа. Полушаговое управление представляет собой объединение управления с двумя фазами и одной фазой. Он питает статор на одну фазу перед переключением на две фазы. Это приводит к тому, что процесс становится в два раза короче.
Это приводит к тому, что процесс становится в два раза короче.
Это в значительной степени устраняет самый большой недостаток двух других типов работы, а именно влияние механического резонанса на двигатель во время его использования. Схема полушаговой операции описывается последовательно АВ-В-А’В-А’-А’В’-В’-АВ’-А.
Положение вала двигателя для ½ шага
Микроуправление
Микрошаговое управление позволяет быстро изменять напряжения в обмотках, разбивая весь шаг на более мелкие шаги. Микрошаговое управление включает в себя вращение магнитного поля в статоре быстрее, чем полушаговое или полношаговое управление, что приводит к меньшему шуму и позволяет двигателю двигаться без шума вплоть до частоты 0 Гц.
Причина резонанса двигателя кроется в импульсной подаче энергии. Выходом из этой ситуации может быть использование микрошага. Это шаговый двигатель, это синхронный двигатель. Это означает, что постоянное положение остановки ротора синхронизировано с магнитным полем в статоре. Вращение ротора достигается за счет вращения поля. затем ротор перемещается в устойчивое положение. Крутящий момент, создаваемый двигателем, зависит от крутящего момента в состоянии покоя (удерживающего крутящий момент) Ms, а также от расстояния между магнитным полем статора и положением ротора Qr.
Вращение ротора достигается за счет вращения поля. затем ротор перемещается в устойчивое положение. Крутящий момент, создаваемый двигателем, зависит от крутящего момента в состоянии покоя (удерживающего крутящий момент) Ms, а также от расстояния между магнитным полем статора и положением ротора Qr.
Где: угловое расстояние Qs и Qr, выраженное в электрических градусах.
Если вы управляете двигателем в полношаговом или полушаговом режиме, магнитное поле в статоре поворачивается между 90° и 45 градусами в каждой фазе двигателя. Микрошаговое управление требует, чтобы токи, протекающие через обмотки, менялись быстро, тем самым разбивая весь шаг на более мелкие шаги. При работе с микрошаговым двигателем система управления должна генерировать сигналы с промежуточными уровнями, которые находятся между самым высоким и самым низким значением источника тока. Полосы токов двигателя создают вектор электромагнитного потока, положение которого на земле определяется величиной токов.
Используя микрошаги, возможно лучшее позиционирование. Стандартный шаг делится на 2-32 раза. В реальном мире при делении на 8 и 16 результаты достигаются за счет уменьшения эффектов от моторного резонанса.
Стандартный шаг делится на 2-32 раза. В реальном мире при делении на 8 и 16 результаты достигаются за счет уменьшения эффектов от моторного резонанса.
Если вы используете микрошаговый контроллер, важно отметить, что отношение энергии возбуждения на микрошаг уменьшается, когда вы делите шаг.
Контроллер шагового двигателя шины Can
Каждое ведомое устройство имеет предел допустимых ошибок рассогласования перед превышением скорости. Если последующие ошибки этого подчиненного устройства превышают пороговое значение, то скорость подчиненного устройства догоняет сеть. Ведущее устройство будет получать следующие ошибки для каждого подчиненного устройства. Если ведомое устройство с наибольшим количеством ошибок превышает порог, установленный ведущим, то ведущее устройство может замедлить работу всей сети. Ведомое устройство, которое имеет следующую ошибку, превышающую его собственный порог, работает с меньшей скоростью, чтобы догнать ведущее устройство.
Если мастеры в результате ошибки превышают порог превышения скорости, мастер будет увеличивать скорость только для того, чтобы наверстать упущенное.
Если ошибка слежения за ведомым устройством превышает максимальное количество ошибок, которое может быть связано с следованием, ведомое устройство останавливается из-за ошибки слежения, а ведущее устройство распределяет остановки по всем сетям.
Шаговый двигатель с редуктором
Выбор редуктора для шагового двигателя
Правильно выбранный редуктор имеет решающее значение для эффективной и экономичной работы нашего оборудования. Это потому, что только правильный редуктор позволит нам увеличить производительность конкретного шагового двигателя за счет достижения наиболее точного разрешения позиционирования и увеличения крутящего момента.
Выбор лучшего редуктора для использования с шаговым двигателем должен зависеть в первую очередь от причины, по которой мы намерены использовать двигатель для робототехники, станков с ЧПУ, а также устройств автоматизации или измерительного оборудования. Коробка передач должна позволять нам перемещать двигатель как можно точнее, сохраняя при этом высокий крутящий момент даже на низкой скорости.
Редуктор для шагового двигателя Существуют различные их типы?
Наиболее часто используемые шестерни для шаговых двигателей:
- Планетарные редукторы,
- червячные редукторы,
- гипоидные редукторы и конические редукторы.
Редуктор, предназначенный для шагового двигателя, изменяет как крутящий момент, так и число оборотов в точных пропорциях, например, уменьшая число оборотов и увеличивая крутящий момент. Поэтому рекомендуется выбрать правильный редуктор, отвечающий вашим требованиям, и рассчитать нужные параметры.
Планетарный редуктор
Планетарная передача состоит из двух концентрических шестерен: солнечного колеса (центрального) с внешним зацеплением и кольца (внешнего) с внутренним зацеплением. Между ними крошечные сателлиты шестеренки, связанные цепью (главной). Сателлиты поворачиваются каждый вокруг своей оси, а все вместе способны вращать вокруг оси весь механизм.
Планетарная передача, вокруг солнечного колеса (внутри кольцевого колеса) вращаются меньшие колеса, называемые сателлитами. Различные передаточные числа достигаются за счет блокировки отдельных планетарных шестерен.
Различные передаточные числа достигаются за счет блокировки отдельных планетарных шестерен.
Планетарные редукторы особенно выгодны для шаговых двигателей. Они способны увеличить крутящий момент вала двигателя, а также обеспечить чрезвычайно точные движения (отдельный шаг) в этом шаговом двигателе, то есть быстрый запуск, торможение, а также изменение направления.
Принцип работы планетарного редуктора
Как работает планетарный редуктор? Вал солнечного колеса, трубчатый вал сателлитной клетки и коронное колесо называются центральными валами. Если один из этих валов выходит из строя, то остальные перенимают всю мощность через трансмиссию. Важно отметить, что различия между солнечным колесом и сателлитами и солнечными колесами как по окружности, так и по количеству зубьев приводят к тому, что эти элементы вращаются с разной скоростью.
Преимущества планетарных редукторов:
- Высокий КПД
- Малые зазоры
- Возможность определения оси редуктора по направлению оси двигателя,
- Достигается высокий передаваемый крутящий момент
- Соосность между валами для входа и выхода
- Распределение нагрузки несколько планетарных передач
- Высокий КПД благодаря низкой мощности качения
- Неограниченные возможности редуктора благодаря сочетанию нескольких различных планетарных ступеней
- -Можно использовать в качестве главного редуктора
- Бесшумная работа
- Подходит для широкого спектра применений
- Простая конструкция, небольшой размер и возможность достижения больших передаточных чисел при коротком времени переключения.

Червячный редуктор
Червячный редуктор представляет собой механизм с перпендикулярными осями, лежащими в двух разных плоскостях. Редуктор, состоящий из червяка (резьбового косозубого ротора), находящегося в зацеплении с червячной передачей (винтовое цилиндрическое колесо с ободом специальной формы), установленной перпендикулярно ему.
Передача мощности в такой коробке передач осуществляется с помощью трения. Направление потока энергии имеет жизненно важное значение. Если приводным элементом является червячный, то КПД редуктора η выражается соотношением:
η = tg γ / tg (γ + ς )
где:
γ – угол шага резьбы
ς – «угол трения» такой, что коэффициент трения μ = tg ς.
Червячная передача с цилиндрическим червяком (а), различное направление вращения червяка и червячной передачи (б). Равномерное поверхностное давление позволяет передавать большие усилия. В простых исполнениях червяк имеет форму винта, а червячная передача представляет собой зубчатое колесо с косыми зубьями.
Аналогично, когда приводным элементом является червячная передача, КПД редуктора η выражается соотношением: КПД редуктора меньше нуля, а это означает невозможность передачи в этом направлении, т.е. самоторможение.
Червячная передача при определенных условиях может самотормозиться. Это одновременно и недостаток, и преимущество. Самоторможение возможно в зависимости от обстоятельств. например, при недостатке смазки коэффициент трения выше допустимого предела, и коробка передач относится к категории самотормозящихся.
Это тоже можно пожелать, при этом червячный механизм работает как шестерня в одном направлении, а также как тормоз в другом. Механизм можно найти, например, в червячных домкратах, а также в механизме для натяжения гитарных струн.
Однако самотормозящая способность червячной передачи не может рассматриваться как тормоз внутри системы, особенно с лебедками или домкратами, когда соображения безопасности имеют решающее значение, поскольку, когда система привода, имеющая неподдерживаемую нагрузку, увеличивается и привод отключенная в неблагоприятных условиях, нагрузка не остановится, а вместо этого заставит систему работать, что ускорит ее.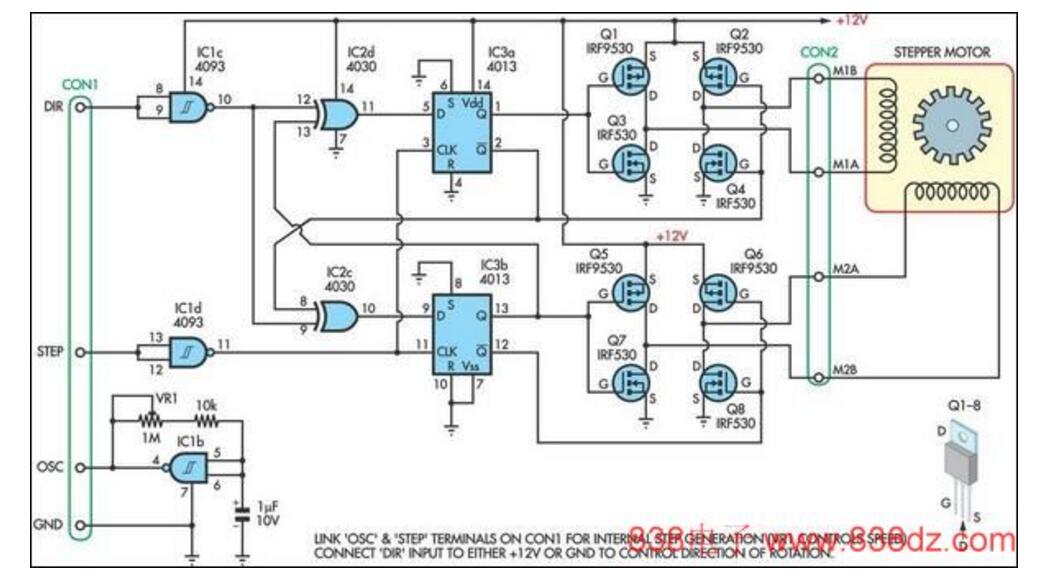
Применение червячных редукторов
Зубчатые передачи выгодно использовать, когда нужно передать крутящий момент под углом 90 градусов. Они подходят для движения, то есть для передачи энергии с активного вала на пассивный, а также в устройствах для деления, таких как делитель, или для движения по столу станка или для привода стола конвертофрезерного станка. Их также можно использовать в устройствах, которые позволяют вручную поворачивать или управлять. Червячные передачи — отличный выбор для шаговых двигателей.
Конический редуктор
Косозубые конические шестерни также могут обладать характеристиками, аналогичными характеристикам червячных передач.
Цилиндрические конические редукторы можно охарактеризовать как редукторы, имеющие как минимум две ступени редуктора (в зависимости от пропорции), а также четырех- и трехступенчатые редукторы). В этих передачах первая фаза представляет собой конические шестерни, а следующие ступени — цилиндрические. Винтовая коническая шестерня обеспечивает угловую передачу крутящего момента. Таким образом, зубчатые передачи, состоящие из двух колес, могут быть использованы для изменения передачи передачи теоретически в диапазоне от 0 до 180 градусов, а чаще в диапазоне от 30 до 150 градусов. Размеры колес варьируются от нескольких миллиметров до 2,5 метров.
Таким образом, зубчатые передачи, состоящие из двух колес, могут быть использованы для изменения передачи передачи теоретически в диапазоне от 0 до 180 градусов, а чаще в диапазоне от 30 до 150 градусов. Размеры колес варьируются от нескольких миллиметров до 2,5 метров.
Трехступенчатый коническо-роликовый редуктор, такие редукторы характеризуются высоким КПД, достигающим до 97%
Цилиндрические конические редукторы отличаются высоким КПД, достигающим до 97%. Одним из преимуществ зубчатых редукторов с винтовыми скосами является превосходная жесткость их зубьев и их бесшумная работа. При необходимости также могут быть использованы комбинации упомянутых типов передач.
В поисках компромисса между производительностью и эффективностью редуктора с коническими роликами, а также его простой конструкцией и выгодным соотношением мощности, передаваемой с активного вала на пассивный, можно было рассмотреть возможность гипоидного редуктора. Компромисс, который следует учитывать при выборе гипоидного редуктора, заключается в сочетании функциональности и эффективности, простой конструкции и низкой стоимости.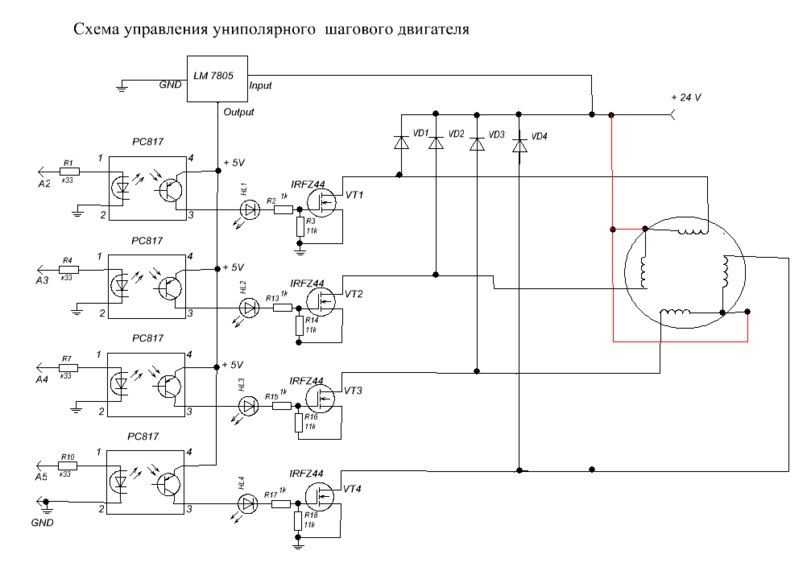
Гибридный шаговый двигатель
Гибридные двигатели обычно используются в промышленном секторе, поскольку они сочетают в себе две технологии шаговых двигателей, упомянутые выше, и обладают превосходными характеристиками и более высокой производительностью. Разрешение этого мотора значительно больше, а угол поворота колеблется от 0,9 до 3,6 градусов, что дает 100-400 шагов на оборот. Ротор двигателя (ротор) двигателя выполнен из постоянных магнитов. Однако, в отличие от двигателей PW, они установлены не радиально, а намагничены в осевом направлении. Ротор этого типа двигателя состоит из двух колец, намагниченных дифференциальным образом и наложенных на ось двигателя.
Каждое кольцо состоит из небольших каналов (канавок), которые обеспечивают зубья ротора. чем больше канавок, тем больше разрешение двигателя (меньше шаг ротора и больше шагов). Как я уже говорил ранее, гибридные двигатели могут иметь возможность двигаться от 100 до 400 раз за оборот. В этом отношении меньший шаг является преимуществом, поскольку позволяет более точно разместить двигатель.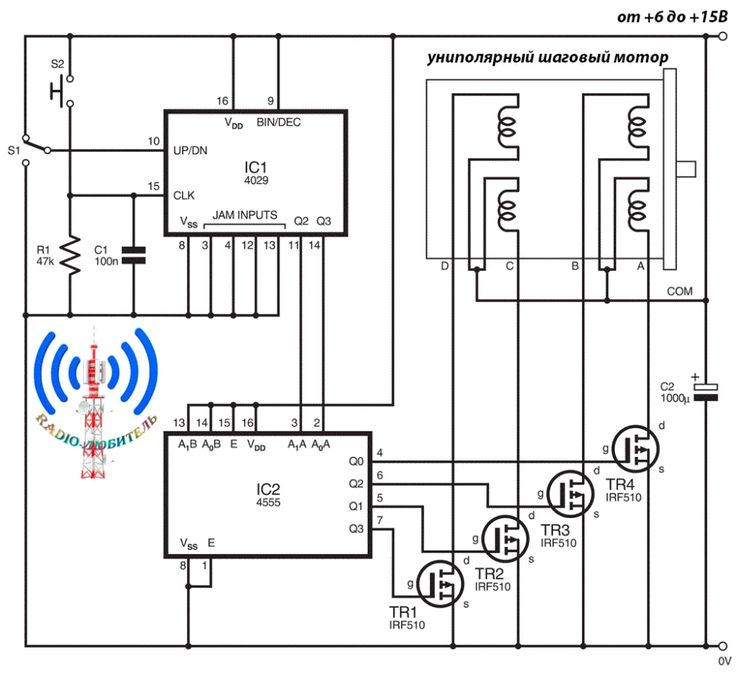 Зубья ротора обеспечивают улучшенный путь для магнитного потока, что повышает производительность двигателя, а динамический момент и момент покоя больше, чем у двигателей с постоянными магнитами и VR. Кроме того, каждое кольцо ротора отделено от другого половиной одного зуба.
Зубья ротора обеспечивают улучшенный путь для магнитного потока, что повышает производительность двигателя, а динамический момент и момент покоя больше, чем у двигателей с постоянными магнитами и VR. Кроме того, каждое кольцо ротора отделено от другого половиной одного зуба.
Статор двигателя обычно состоит из двух обмоток и восьми полюсов, но четыре полюса могут работать в паре с одной обмоткой, т. е. при питании каждой из обмоток двигателя на статоре появляются два неидентичных полюса размещены вдоль радиальной оси, в унисон.
Основной принцип работы гибридных двигателей основан на магнитном взаимодействии. Постоянный магнит, размещенный на роторе, создает однополярный магнитный поток, который замыкается магнитопроводом: статор – воздушный зазор и ротор. Когда обмотка статора активирована, магнитный поток, создаваемый под одной стороной статора, будет добавляться к потоку постоянных магнитов, а под другой — вычитаться. Ротор приводят в движение так, чтобы оси зубьев статора и ротора совпадали.
С простым объяснением можно сказать, что зубья в одном «кольце» ротора совпадают с зубьями статора, тогда зубья в других кольцах ротора не совпадают с зубьями статора и находятся в канавках катушки, находящейся под напряжением, и сцепите половину зубца с катушкой, которая не находится под напряжением. Они как бы «ждут», пока катушка с совпадающими зубьями остановится и чтобы катушка, на которую подано напряжение, зацепила половинку зуба, чтобы двигаться и двигаться от половинки зубца статора к полному. Это взаимодействие между магнитным полем.
Концепция конструкции гибридного двигателя идентична концепции двигателя VR. Гибридный двигатель похож на двигатель VR, но имеет множество полюсов и зубцов для ротора. Гибридные двигатели обычно используются в промышленности из-за их более высокой производительности, чем двигатели с постоянными магнитами, хотя они и более дорогие.
Каталожные номера:
https://heilig.up.krakow.pl/mikrokontrolery/Pomoc/Sterowanie%20silnikami%20krokowymi.