Содержание
Ошибка
- Автомобиль — модели, марки
- Устройство автомобиля
- Ремонт и обслуживание
- Тюнинг
- Аксессуары и оборудование
- Компоненты
- Безопасность
- Физика процесса
- Новичкам в помощь
- Приглашение
- Официоз (компании)
- Пригородные маршруты
- Персоны
- Наши люди
- ТЮВ
- Эмблемы
- А
- Б
- В
- Г
- Д
- Е
- Ё
- Ж
- З
- И
- Й
- К
- Л
- М
- Н
- О
- П
- Р
- С
- Т
- У
- Ф
- Х
- Ц
- Ч
- Ш
- Щ
- Ъ
- Ы
- Ь
- Э
- Ю
- Я
Навигация
- Заглавная страница
- Сообщество
- Текущие события
- Свежие правки
- Случайная статья
- Справка
Личные инструменты
- Представиться системе
Инструменты
- Спецстраницы
Пространства имён
- Служебная страница
Просмотры
Перейти к: навигация,
поиск
Запрашиваемое название страницы неправильно, пусто, либо неправильно указано межъязыковое или интервики название. Возможно, в названии используются недопустимые символы.
Возможно, в названии используются недопустимые символы.
Возврат к странице Заглавная страница.
Если Вы обнаружили ошибку или хотите дополнить статью, выделите ту часть текста статьи, которая нуждается в редакции, и нажмите Ctrl+Enter. Далее следуйте простой инструкции.
Особенности системы управления двигателем ВАЗ-21114
На двигателе ВАЗ-21114 применена система распределенного фазированного впрыска: топливо подается форсунками в каждый цилиндр поочередно в соответствии с порядком работы цилиндров двигателя
Электронная система управления двигателем (ЭСУД) состоит из контроллера, датчиков параметров работы двигателя и автомобиля, а также дополнительных устройств.
Контроллер системы впрыска является центральным устройством системы управления двигателем.
Контроллер прикреплен к корпусу отопителя снизу, под панелью приборов.
Контроллер получает информацию от датчиков и управляет исполнительными устройствами, такими как топливные форсунки, катушка зажигания, регулятор холостого хода, нагревательный элемент датчика концентрации кислорода, электромагнитный клапан продувки адсорбера, электровентилятор системы охлаждения и различными реле системы.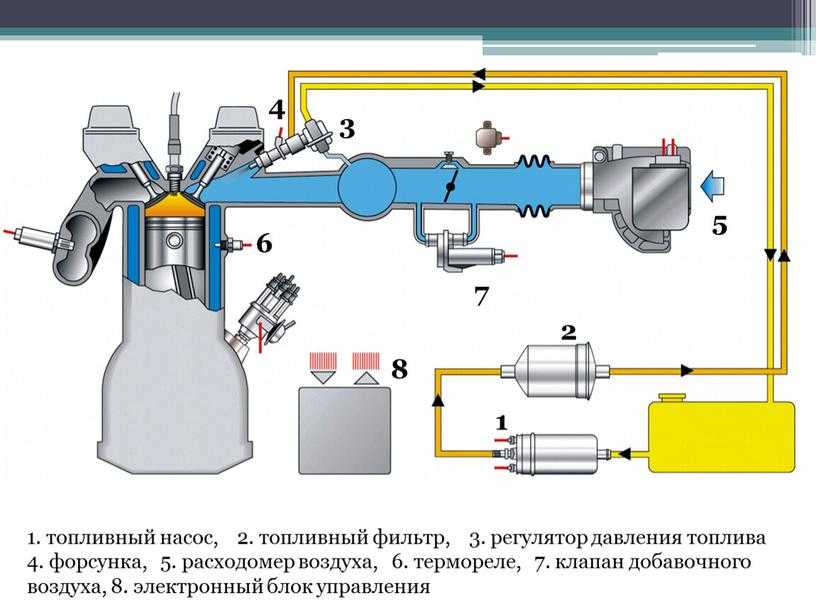
При включении зажигания контроллер включает главное реле, через которое напряжение питания подводится к элементам системы (кроме электробензонасоса, катушки зажигания, электровентилятора, блока управления и сигнализатора состояния иммобилайзера).
При выключении зажигания контроллер задерживает выключение главного, реле на время, необходимое для подготовки к следующему включению (для завершения вычислений, установки регулятора холостого хода, управления электровентилятором системы охлаждения).
Контроллер представляет собой мини- компьютер специального назначения.
Он содержит три вида памяти — оперативное запоминающее устройство (ОЗУ), программируемое постоянное запоминающее устройство (ППЗУ) и электрически репрограммируемое запоминающее устройство (ЭРПЗУ).
ОЗУ используется микропроцессором для временного хранения текущей информации о работе двигателя (измеряемых параметров) и расчетных данных.
Также в ОЗУ записываются коды возникающих неисправностей.
Эта память энергозависима, т. е. при прекращении питания (отключении аккумуляторной батареи или отсоединении от контроллера жгута проводов) ее содержимое стирается.
В ППЗУ хранится программа управления, которая содержит последовательность рабочих команд (алгоритм) и калибровочные данные (настройки).
Таким образом, ППЗУ определяет важнейшие параметры работы двигателя: характер изменения момента и мощности, расход топлива и т. п. ППЗУ энергонезависимо, т. е. его содержимое не изменяется при отключении питания.
ЭРПЗУ используется для хранения идентификаторов контроллера, двигателя и автомобиля (записываются коды иммобилайзера при обучении ключей) и других служебных кодов.
Кроме того, в ЭРПЗУ записываются эксплуатационные параметры (общий пробег автомобиля и время работы двигателя, общий расход топлива), а также нарушения режимов работы двигателя и автомобиля (время работы двигателя: с перегревом, на низкооктановом топливе, с превышением максимально допустимых оборотов, неисправными датчиками детонации, концентрации кислорода и скорости).
ЭРПЗУ является энергонезависимой памятью и может хранить информацию при отсутствии питания контроллера.
Контроллер также выполняет диагностические функции системы управления двигателем (бортовая система диагностики).
Контроллер определяет наличие неисправностей элементов системы управления, включает сигнализатор неисправности в комбинации приборов и сохраняет в своей памяти коды неисправностей.
При обнаружении неисправности, во избежание негативных последствий (прогорание поршней из-за детонации, повреждение каталитического нейтрализатора в случае возникновения пропусков воспламенения топливовоздушной смеси, превышение предельных значений по токсичности отработавших газов и пр.), контроллер переводит систему на аварийные режимы работы.
Суть их состоит в том, что при выходе из строя какого-либо датчика или его цепи контроллер для управления двигателем применяет замещающие данные, хранящиеся в ППЗУ.
Сигнализатор неисправности системы управления двигателем расположен в комбинации приборов.
Если система исправна, то при включении зажигания сигнализатор должен загореться — таким образом, ЭСУД проверяет исправность сигнализатора и цепи управления.
После пуска двигателя сигнализатор должен погаснуть, если в памяти контроллера отсутствуют условия для его включения.
Включение сигнализатора при работе двигателя информирует водителя о том, что бортовая система диагностики обнаружила неисправность, и дальнейшее движение автомобиля происходит в аварийном режиме.
При этом могут ухудшиться некоторые параметры работы двигателя (мощность, приемистость, экономичность), но движение с такими неисправностями возможно, и автомобиль может самостоятельно доехать до СТО.
Единственным исключением является датчик положения коленчатого вала, при неисправности датчика или его цепей двигатель работать не может.
После устранения причин неисправности сигнализатор будет выключен контроллером через определенное время задержки, в течение которого неисправность не проявляется, и при условии, что в памяти контроллера отсутствуют другие коды неисправностей, требующие включение сигнализатора.
Коды неисправностей (даже если сигнализатор погас) остаются в памяти контроллера и могут быть считаны с помощью диагностического прибора DST-2M, подключаемого к диагностическому разъему.
При удалении кодов неисправностей из памяти контроллера с помощью диагностического прибора или посредством отключения аккумуляторной батареи (не менее чем на 10 с) сигнализатор гаснет.
Датчики системы впрыска выдают контроллеру информацию о параметрах работы двигателя и автомобиля, на основании которых он рассчитывает момент, длительность и порядок открытия топливных форсунок, момент и порядок искрообразования.
Датчик положения коленчатого вала (ДПКВ) установлен на корпусе масляного насоса.
Датчик выдает контроллеру информацию о частоте вращения и угловом положении коленчатого вала.
Датчик — индуктивного типа, реагирует на прохождение вблизи своего сердечника зубьев задающего диска, объединенного со шкивом привода генератора.
Зубья расположены на диске с интервалом 6˚. Для синхронизации с ВМТ поршней 1 и 4 цилиндров два зуба из 60 срезаны, образуя впадину.
Для синхронизации с ВМТ поршней 1 и 4 цилиндров два зуба из 60 срезаны, образуя впадину.
При прохождении впадины мимо датчика в нем генерируется так называемый опорный импульс синхронизации.
Установочный зазор между сердечником и вершинами зубьев должен находиться в пределах 1±0,4 мм.
При вращении задающего диска изменяется магнитный поток в магнитопроводе датчика — в его обмотке наводятся импульсы напряжения переменного тока.
По количеству и частоте этих импульсов контроллер рассчитывает фазу и длительность импульсов управления форсунками и катушкой зажигания.
Датчик фаз (ДФ) установлен на заглушке головки блока цилиндров.
Принцип действия датчика основан на эффекте Холла.
В отверстие хвостовика распределительного вала запрессован штифт.
Когда штифт вала проходит мимо сердечника датчика, датчик выдает на контроллер импульс напряжения низкого уровня (около 0 В), соответствующий положению поршня 1-го цилиндра в конце такта сжатия.
Сигнал датчика фаз контроллер использует для последовательного впрыска топлива в соответствии с порядком работы цилиндров.
При выходе из строя датчика фаз контроллер переходит в режим нефазированного впрыска топлива.
Датчик температуры охлаждающей жидкости (ДТОЖ) установлен в выпускном патрубке на головке блока цилиндров.
Датчик представляет собой терморезистор с отрицательным температурным коэффициентом, т. е. его сопротивление уменьшается при повышении температуры.
Контроллер подает на датчик через резистор (около 2 кОм) стабилизированное напряжение +5 В и по падению напряжения на датчике рассчитывает температуру охлаждающей жидкости, значения которой используют в большинстве функций управления двигателем.
При возникновении неисправностей цепей ДТОЖ загорается сигнализатор неисправности системы управления двигателем, контроллер включает вентилятор системы охлаждения на постоянный режим работы и рассчитывает значение температуры по обходному алгоритму.
Датчик положения дроссельной заслонки (ДПДЗ) установлен на оси дроссельной заслонки и представляет собой резистор потенциометрического типа.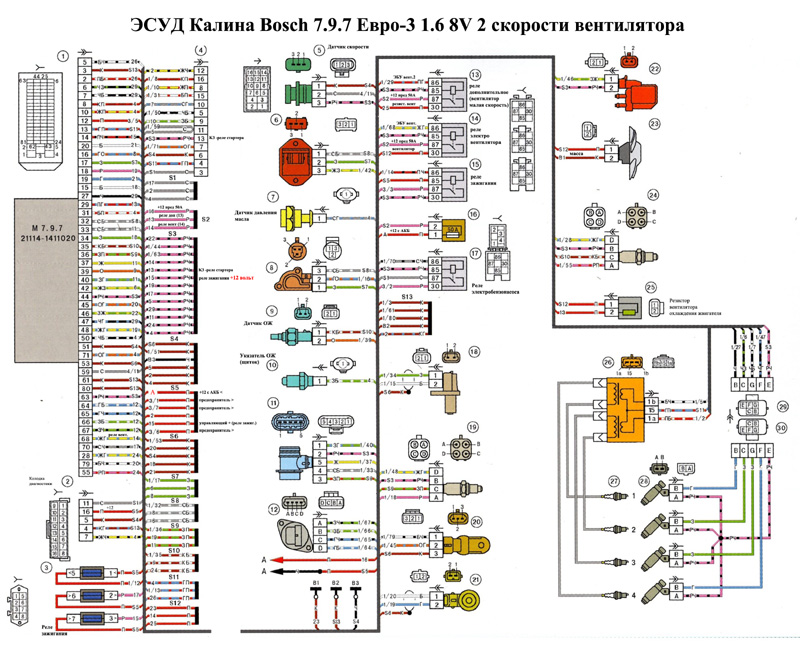
На один конец его обмотки подается от контроллера стабилизированное напряжение +5 В, а другой соединен с «массой» контроллера.
С третьего вывода потенциометра (ползунка) снимается сигнал для контроллера.
Периодически измеряя выходное напряжение сигнала ДПДЗ, контроллер определяет текущее положение дроссельной заслонки для расчета угла опережения зажигания и длительности импульсов впрыска топлива, а также для управления регулятором холостого хода.
При выходе из строя ДПДЗ или его цепей контроллер включает сигнализатор неисправности и рассчитывает предполагаемое значение положения дроссельной заслонки по частоте вращения коленчатого вала и массовому расходу воздуха.
Датчик массового расхода воздуха (ДМРВ) термоанемометрического типа расположен между воздушным фильтром и шлангом подвода воздуха к дроссельному узлу.
В зависимости от расхода воздуха напряжение выходного сигнала датчика изменяется от 1,0 до 5,0 В.
При выходе из строя датчика, контроллер рассчитывает значение массового расхода воздуха по частоте вращения коленчатого вала и расположению дроссельной заслонки.
ДМРВ имеет встроенный датчик температуры воздуха (ДТВ), чувствительным элементом которого является термистор, установленный в потоке воздуха.
Выходной сигнал датчика изменяется в диапазоне от 0 до 5,0 В, в зависимости от температуры воздуха проходящего через датчик.
При возникновении неисправности цепи ДТВ контроллер включает сигнализатор неисправности и заменяет показание датчика фиксированным значением температуры воздуха (33˚С).
Датчик детонации (ДД) закреплен на передней верхней части блока цилиндров.
Пьезокерамический чувствительный элемент датчика генерирует сигнал напряжения переменного тока, амплитуда и частота которого соответствует параметрам вибраций двигателя.
При возникновении детонации амплитуда вибраций определенной частоты возрастает.
При этом для гашения детонации контроллер корректирует угол опережения зажигания.
Управляющий датчик концентрации кислорода (УДК) установлен в катколлекторе до каталитического нейтрализатора отработавших газов.
Контроллер рассчитывает длительность импульса впрыска топлива по таким параметрам, как массовый расход воздуха, частота вращения коленчатого вала, температура охлаждающей жидкости, положение дроссельной заслонки.
По сигналу от УДК о наличии кислорода в отработавших газах контроллер корректирует подачу топлива форсунками, так чтобы состав отработавших газов был оптимальным для эффективной работы каталитического нейтрализатора.
Кислород, содержащийся в отработавших газах, создает разность потенциалов на выходе датчика, изменяющуюся приблизительно от 50 до 900 мВ.
Низкий уровень сигнала соответствует бедной смеси (наличие кислорода), а высокий уровень — богатой (кислород отсутствует).
Когда УДК находится в холодном состоянии, выходной сигнал датчика отсутствует, т. к. его внутреннее сопротивление в этом состоянии очень высокое — несколько МОм (система управления двигателем работает по разомкнутому контуру).
Для нормальной работы датчик концентрации кислорода должен иметь температуру не ниже 300 ˚с, поэтому для быстрого прогрева после запуска двигателя в него встроен нагревательный элемент, которым управляет контроллер.
По мере прогрева сопротивление датчика падает, и он начинает генерировать выходной сигнал.
Контроллер постоянно выдает в цепь датчика стабилизированное опорное напряжение 450 мВ.
Пока датчик не прогреется, его выходное напряжение находится в диапазоне от 300 до 600 мВ. При этом контроллер управляет системой впрыска, не учитывая напряжение на датчике.
По мере прогрева датчика его внутреннее сопротивление уменьшается, и он начинает изменять выходное напряжение, выходящее за пределы указанного диапазона.
Тогда контроллер отключает нагрев датчика и начинает учитывать сигнал датчика концентрации кислорода для управления топливоподачей в режиме замкнутого контура.
Датчик концентрации кислорода может быть отравлен в результате применения этилированного бензина или использования при сборке двигателя герметиков, содержащих в большом количестве силикон (соединения кремния) с высокой летучестью.
Испарения силикона могут попасть через систему вентиляции картера в камеру сгорания.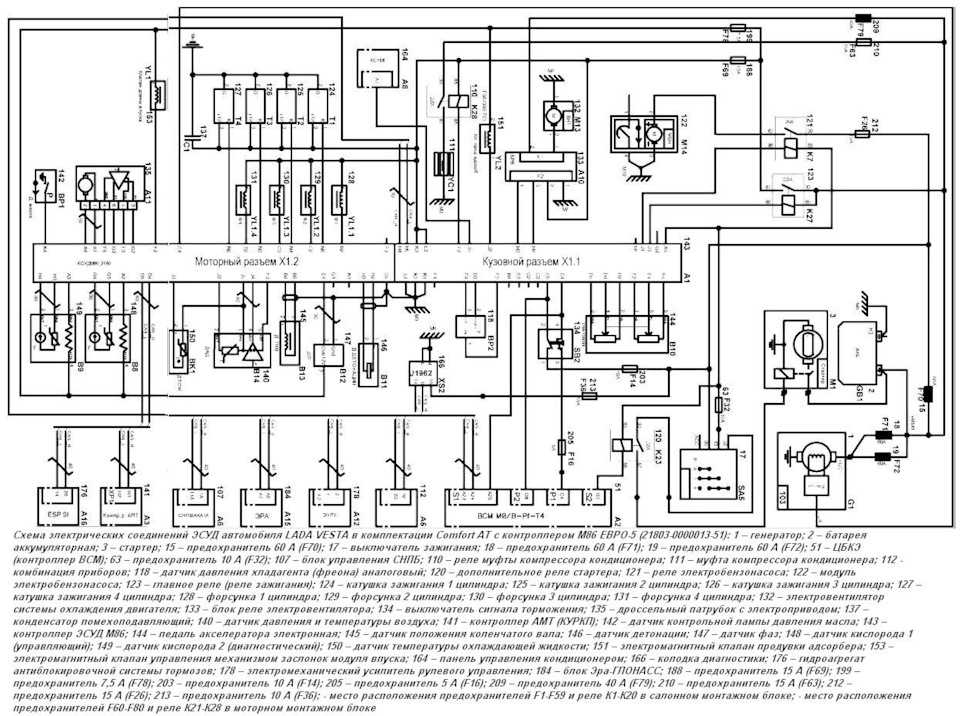
Присутствие соединений свинца или кремния в отработавших газах может привести к выходу датчика из строя.
В случае выхода из строя датчика или его цепей контроллер включает сигнализатор неисправности, заносит в свою память соответствующий код неисправности и управляет топливоподачей по разомкнутому контуру.
Диагностический датчик концентрации кислорода (ДДК) применяется в системе управления двигателем, выполненной под нормы токсичности Euro-3.
ДДК установлен в катколлекторе после каталитического нейтрализатора отработавших газов.
Принцип работы ДДК такой же, как и УДК. сигнал, генерируемый ДДК, указывает на наличие кислорода в отработавших газах после нейтрализатора.
Если нейтрализатор работает нормально, показания ДДК будут значительно отличаться от показаний УДК.
Напряжение выходного сигнала прогретого ДДК при работе в режиме замкнутого контура и исправном нейтрализаторе должно находиться в диапазоне от 590 до 750 мВ.
При возникновении неисправности датчика или его цепей контроллер заносит в свою память код неисправности и включает сигнализатор.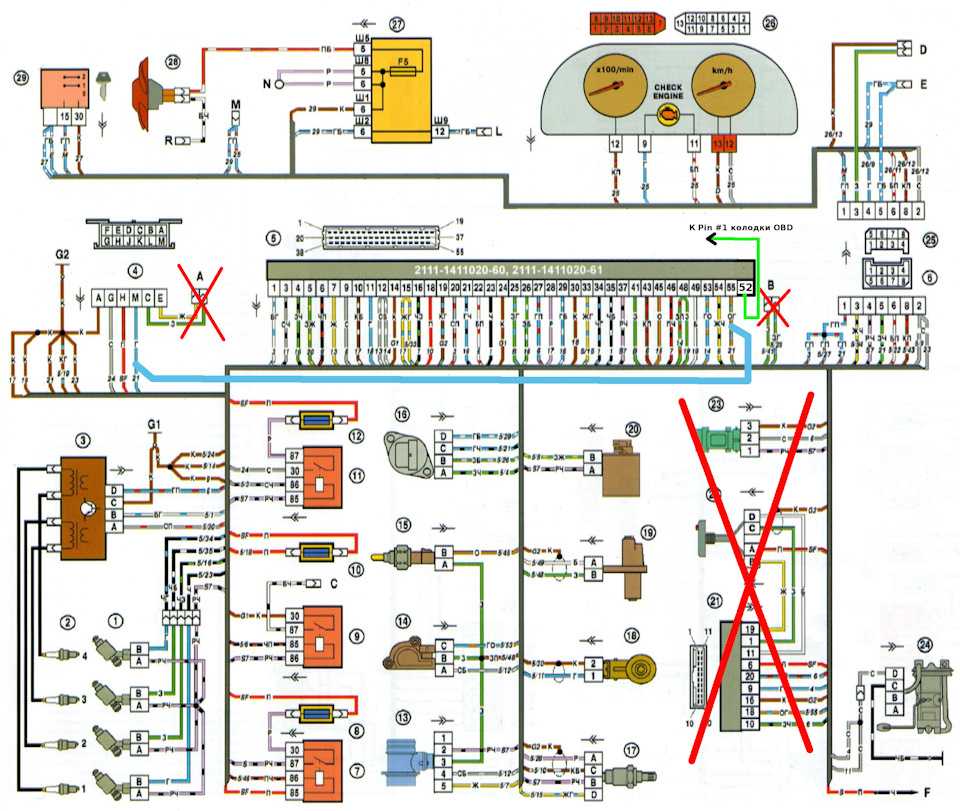
Датчик скорости автомобиля установлен сверху на картере коробки передач.
Принцип его действия основан на эффекте Холла. Задающий диск датчика установлен на коробке дифференциала.
Датчик выдает на контроллер прямоугольные импульсы напряжения (нижний уровень — не более 1 В, верхний — не менее 5 В) с частотой, пропорциональной скорости вращения ведущих колес.
Количество импульсов датчика пропорционально пути, пройденному автомобилем. Контроллер определяет скорость автомобиля по частоте импульсов.
При выходе из строя датчика или его цепей контроллер заносит в свою память код неисправности и включает сигнализатор.
Датчик неровной дороги (ДНД) применяется в системе управления двигателем, выполненной под нормы токсичности Euro-3.
Датчик установлен в моторном отсеке на правой чашке брызговика.
датчик предназначен для измерения амплитуды колебаний кузова.
Принцип его работы основан на пьезоэффекте.
Возникающая при движении по неровной дороге переменная нагрузка на трансмиссию влияет на угловую скорость вращения коленчатого вала двигателя.
При этом колебания частоты вращения коленчатого вала похожи на аналогичные колебания, возникающие при пропусках воспламенения топливовоздушной смеси в цилиндрах двигателя.
В этом случае для предупреждения ложного обнаружения пропусков воспламенения контроллер отключает эту функцию бортовой системы диагностики при превышении сигнала ДНД выше определенного порога.
При выходе из строя датчика или его цепей контроллер заносит в свою память код неисправности и включает сигнализатор.
При включении зажигания контроллер обменивается информацией с иммобилайзером (если он активирован), предназначенным для предотвращения несанкционированного пуска двигателя.
Если при обмене информацией установлено, что доступ к пуску двигателя, разрешен, контроллер продолжает функционировать. В противном случае пуск двигателя блокируется.
Блок управления иммобилайзера расположен внутри панели приборов.
Система зажигания состоит из катушки зажигания, высоковольтных проводов и свечей зажигания. При эксплуатации она не требует обслуживания и регулирования, за исключением замены свечей.
При эксплуатации она не требует обслуживания и регулирования, за исключением замены свечей.
Четырехвыводная катушка зажигания представляет собой блок из двух катушек.
Управление током в первичных обмотках катушек осуществляется контроллером в зависимости от режима работы двигателя.
К выводам вторичных (высоковольтных) обмоток катушек подключены свечные провода: к одной обмотке — 1-го и 4-го цилиндров, к другой — 2-го и 3-го.
Таким образом, искра одновременно проскакивает в двух цилиндрах (1-4 или 2-З) в одном во время такта сжатия (рабочая искра), в другом — во время такта выпуска (холостая).
Катушка зажигания — неразборная, при выходе из строя ее заменяют.
Свечи зажигания А17ДВРМ или их аналоги, с помехоподавительным резистором сопротивлением 4—10 кОм и медным сердечником.
Зазор между электродами свечи — 1,0—1,1 мм.
Размер шестигранника под ключ — 21 мм.
В связи с постоянным направлением тока во вторичных обмотках катушки, ток искрообразования у каждой пары свечей, работающих одновременно, всегда протекает с центрального электрода на боковой — для одной свечи и с бокового электрода на центральный — для другой.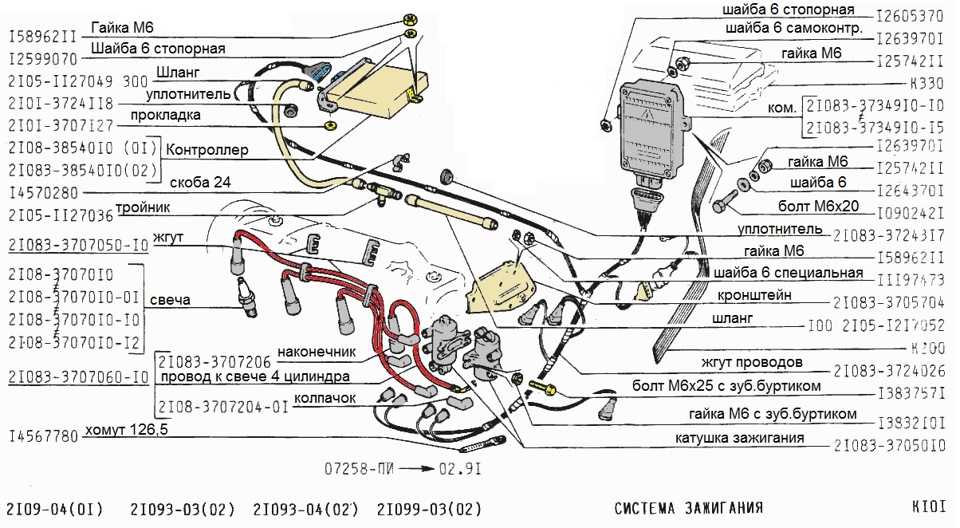
Электроэрозионный износ свечей пары будет разным.
Три предохранителя (по 15 А каждый) и диагностический разъем системы управления расположены под крышкой туннеля пола.
Кроме предохранителя в цепи питания системы управления двигателем предусмотрена плавкая вставка на конце провода красного цвета (подсоединенного к выводу «+» аккумуляторной батареи), выполненная в виде отрезка провода серого цвета сечением 1 мм.
Блок реле системы управления, состоящий из главного реле, реле электробензонасоса и реле электровентилятора системы охлаждения расположен под консолью панели приборов рядом с контроллером.
При включении зажигания контроллер на 2 с запитывает реле электробензонасоса для создания необходимого давления в топливной рампе.
Если в течение этого времени проворачивание коленчатого вала стартером не началось, контроллер отключает реле и вновь включает после начала проворачивания.
Если зажигание включалось три раза подряд без проворачивания стартера коленчатого вала, то следующее включение реле электробензонасоса произойдет только с началом проворачивания.
При работе двигателя состав смеси регулируется длительностью управляющего импульса, подаваемого на форсунки (чем длиннее импульс, тем больше подача топлива).
При пуске двигателя контроллер обрабатывает сигнал датчика температуры охлаждающей жидкости для определения необходимой для пуска длительности импульсов впрыска.
Во время пуска двигателя топливо подается в цилиндры двигателя «асинхронно» — независимо от положения коленчатого вала.
Как только обороты коленчатого вала двигателя достигнут определенной величины (зависящей от температуры охлаждающей жидкости), контроллер формирует фазированный импульс включения форсунок — топливо подается в цилиндры «синхронно» ( в зависимости от положения коленчатого вала).
При этом контроллер по информации, полученной от датчиков рассчитывает момент включения каждой форсунки: топливо впрыскивается один раз за один полный цикл соответствующего цилиндра.
При отсутствии сигнала датчика положения коленчатого вала (вал не вращается или неисправен датчик и его цепи) контроллер отключает подачу топлива в цилиндры.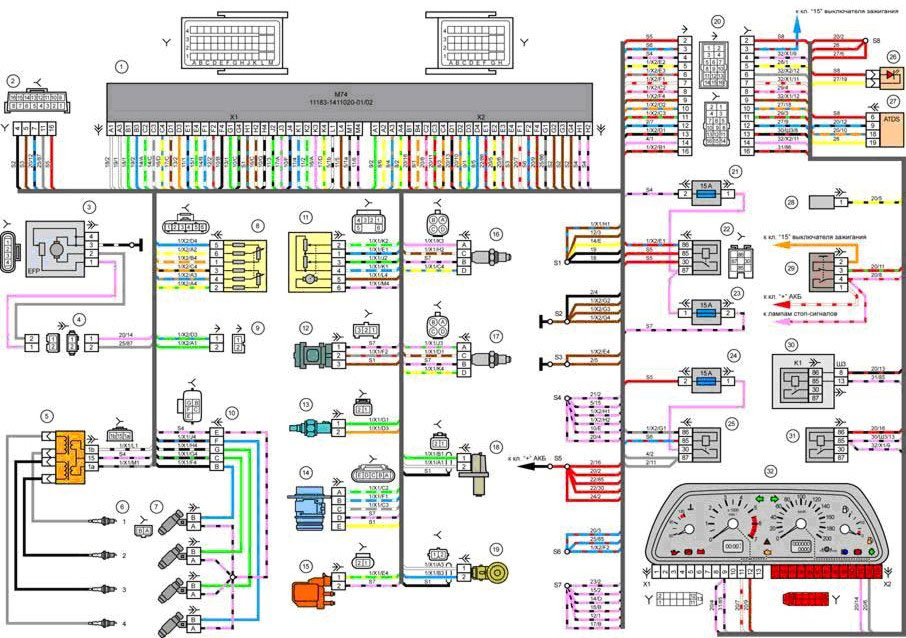
Подача топлива отключается и при выключенном зажигании, что предотвращает самовоспламенение смеси в цилиндрах двигателя.
В случае определения контроллером пропусков воспламенения топливовоздушной смеси в одном или нескольких цилиндрах, подача топлива в эти цилиндры прекращается, и сигнализатор неисправности системы управления начинает мигать.
Во время торможения двигателем (при включенных передаче и сцеплении), когда дроссельная заслонка полностью закрыта, а частота вращения коленчатого вала двигателя велика, впрыск топлива в цилиндры не производится для снижения токсичности отработавших газов.
При падении напряжения в бортовой цепи автомобиля контроллер увеличивает время накопления энергии в катушке зажигания (для надежного поджигания горючей смеси) и длительности импульса впрыска (для компенсации увеличения времени открытия форсунки).
При возрастании напряжения в бортовой сети время накопления энергии в катушке зажигания и длительность импульса уменьшаются.
Контроллер управляет включением электровентилятора системы охлаждения (через реле) в зависимости от температуры двигателя, частоты вращения коленчатого вала и работы кондиционера (если он установлен).
Электровентилятор системы охлаждения включается, если температура охлаждающей жидкости превысит допустимое значение.
В системе управления двигателем выполненной под нормы токсичности Euro-3, используется два реле включения электровентилятора.
В зависимости от условий работы двигателя и кондиционера контроллер может включить электровентилятор на высокую скорость или на низкую — через другое реле и дополнительный резистор
При обслуживании и ремонте системы управления двигателем всегда выключайте зажигание (в некоторых случаях необходимо отсоединить клемму провода от минусового вывода аккумуляторной батареи).
При проведении сварочных работ на автомобиле отсоединяйте жгуты проводов системы управления двигателем от контроллера. Перед сушкой автомобиля в сушильной камере (после покраски) снимите контроллер.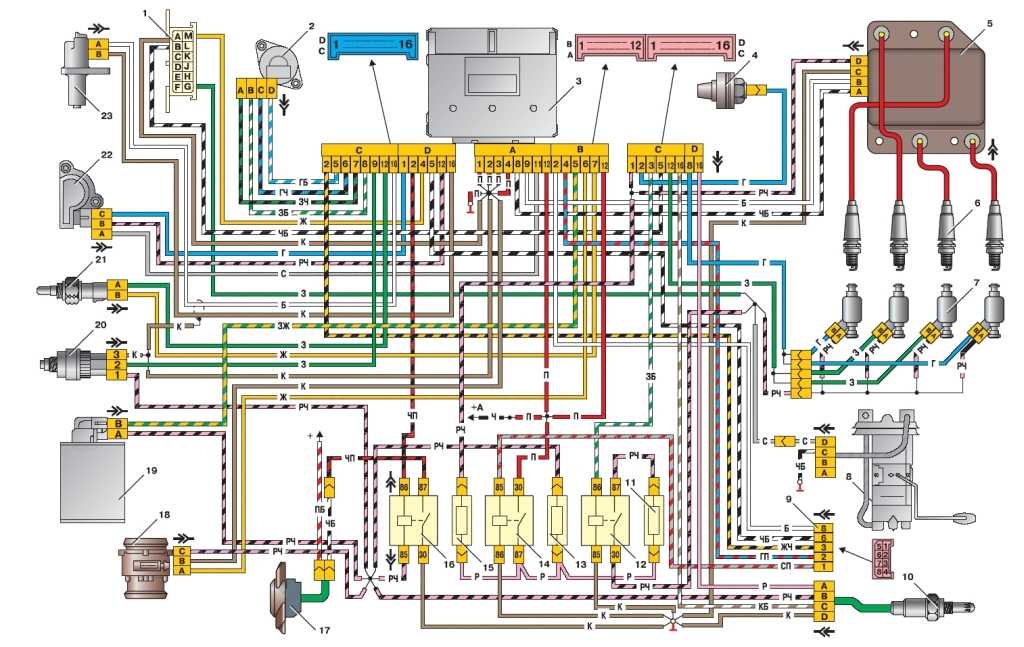
На работающем двигателе не отсоединяйте и не поправляйте колодки жгута проводов системы управления двигателем, а также клеммы проводов на выводах аккумуляторной батареи.
Не пускайте двигатель, если клеммы проводов на выводах аккумуляторной батареи и наконечники массовых проводов на двигателе не закреплены или загрязнены.
Особенности ЭБУ с электронной педалью газа ВАЗ-2123
С 2015 года на автомобиль ВАЗ-2123 устанавливается электронная система управления двигателем с контроллером МЭ17.9.71 2123-1411020-50 для соответствия токсичности ЕВРО-5 стандарты.
Электронная система управления двигателем (ECM) состоит из контроллера, датчиков параметров работы двигателя и автомобиля, а также исполнительных механизмов.
Контроллер представляет собой мини-ЭВМ специального назначения, состоит из оперативной памяти (RAM), программируемой постоянной памяти (PROM) и электрически перепрограммируемой памяти (EPROM).
Оперативная память используется микропроцессором для временного хранения текущей информации о работе двигателя (измеренные параметры) и расчетных данных.
Также в ОЗУ записываются коды неисправностей.
Эта память энергозависимая, т.е. при отключении питания (отключение аккумулятора или отсоединение блока жгута проводов от контроллера) ее содержимое стирается.
EPROM хранит программу управления двигателем, содержащую последовательность рабочих команд (алгоритмы) и калибровочные данные (настройки).
ППЗУ определяет важнейшие параметры работы двигателя: характер изменения крутящего момента и мощности, расход топлива, угол опережения зажигания, состав выхлопных газов и др. ППЗУ является энергонезависимым, т.е. содержимое его памяти не изменяется когда питание отключено.
ERPROM хранит идентификаторы контроллера, двигателя и транспортного средства.
Записывает рабочие параметры, а также неисправности двигателя и автомобиля. Это энергонезависимая память.
Контроллер является центральным блоком системы управления двигателем. Он получает информацию от датчиков и управляет исполнительными механизмами, обеспечивая оптимальную работу двигателя при заданном уровне производительности автомобиля.
Контроллер расположен в районе ног пассажира и крепится к перегородке.
Контроллер управляет приводами, такими как топливные форсунки, дроссельная заслонка с электроприводом, катушка зажигания, нагреватель кислородного датчика, клапан продувки адсорбера и различные реле.
Контроллер управляет включением и выключением главного реле (реле зажигания), через которое питающее напряжение от аккумуляторной батареи подается на элементы системы (кроме электробензонасоса, электровентилятора, блока управления и состояния АПС индикатор).
Контроллер включает главное реле при включении зажигания.
При выключении зажигания контроллер задерживает выключение главного реле на время, необходимое для подготовки к следующему включению (завершение расчетов, установка дроссельной заслонки в положение перед запуском двигателя).
При включении зажигания контроллер, помимо выполнения указанных выше функций, осуществляет обмен информацией с АПС (если включена функция иммобилизации).
Если обмен определяет, что доступ к транспортному средству разрешен, то контроллер продолжает выполнять функции управления двигателем. В противном случае двигатель будет заблокирован.
Контроллер также выполняет функцию диагностики системы.
Определяет наличие неисправностей элементов системы, включает сигнализацию и сохраняет в памяти коды, указывающие на характер неисправности и помогающие механику в проведении ремонта.
В системе управления двигателем используется датчик массового расхода воздуха с термоконтактом и частотной характеристикой цифрового выходного сигнала.
Находится между воздушным фильтром и шлангом впускной трубы.
Сигнал MAF представляет собой частотный (Гц) сигнал, частота повторения импульсов которого зависит от количества воздуха, проходящего через датчик (увеличивается с увеличением расхода воздуха).
Сканер считывает данные датчика как расход воздуха в килограммах в час.
Датчики положения дроссельной заслонки (TPS)
В системе EAF используются два датчика положения дроссельной заслонки. ДПДЗ входят в состав дроссельного патрубка с электроприводом.
ДПДЗ входят в состав дроссельного патрубка с электроприводом.
ТПДЗ — резистор потенциометрического типа, на один из выводов которого подается опорное напряжение (5 В) от контроллера, а на второй — заземление от контроллера.
С выхода, подключенного к подвижному контакту потенциометра, выходной сигнал ДПДЗ поступает на контроллер.
Контроллер электрически управляет положением дроссельной заслонки в зависимости от положения педали акселератора.
По показаниям ДПДЗ контроллер контролирует положение дроссельной заслонки.
При включении зажигания контроллер устанавливает заслонку в предпусковое положение, степень открытия которой зависит от температуры охлаждающей жидкости.
В предпусковом положении дроссельной заслонки выходной сигнал ДПДЗ 1 должен быть в пределах 0,65…0,79 В, выход ДПДЗ 2 должен быть в пределах 4,21…4,35 В.
Если не запустить двигатель и не нажимать педаль акселератора в течение 15 секунд, контроллер обесточивает электропривод дроссельной заслонки и дроссельная заслонка устанавливается в положение 7-8% открытия дроссельной заслонки.
В обесточенном состоянии (LIMP HOME) привода дроссельной заслонки выходной сигнал ДПДЗ 1 находится в диапазоне 0,80…0,85 В, выходной сигнал ДПДЗ 2 находится в диапазоне 4,15…4,20 В.
Далее, если в течение 15 секунд не предпринимать никаких действий, наступит режим проверки («обучения») 0-положения дроссельной заслонки — полное закрытие и открытие дроссельной заслонки в предпусковое положение, а затем дроссельная заслонка привод снова перейдет в обесточенный режим.
При любом положении дроссельной заслонки сумма сигналов TPS 1 и TPS 2 должна быть равна (5 ± 0,1) В.
При возникновении неисправности в цепях ДПДЗ контроллер обесточивает привод дроссельной заслонки, сохраняет в памяти его код и включает сигнализатор. При этом дроссельная заслонка устанавливается в положение 7-8% открытия дроссельной заслонки.
В автомобилях с электронной дроссельной заслонкой используется электронная педаль акселератора, которая электрически передает сигнал положения педали акселератора на контроллер.
Электронная педаль газа расположена на кронштейне под правой ногой водителя.
Электронная педаль газа использует два датчика положения педали акселератора (APPS). DPPA представляют собой резисторы потенциометрического типа с питанием от контроллера 5 В.
РЗА механически связан с приводом рычага педали. Две независимые пружины между рычагом педали и корпусом создают возвратную силу.
Получая аналоговый электрический сигнал от ЭСУ, контроллер формирует сигнал для управления положением дроссельной заслонки.
Выходное напряжение DPPA изменяется пропорционально нажатию педали акселератора.
При отпускании педали акселератора сигнал DPPA 1 должен быть в пределах 0,46…0,76 В, сигнал DPPA 2 должен быть в пределах 0,23…0,38 В.
При полном нажатии педали акселератора сигнал DPPA 1 сигнал должен быть в пределах 2,80…3,10 В, сигнал ДППУ 2 должен быть в пределах 1,40…1,55 В.
При любом положении педали акселератора сигнал РЗА 1 должен быть в два раза больше сигнала РЗА 2.
Датчик температуры охлаждающей жидкости (СТОЖ)
Датчик устанавливается в поток охлаждающей жидкости двигателя, на выходной патрубок водяной рубашки двигателя.
Чувствительным элементом датчика температуры охлаждающей жидкости является термистор, т. е. резистор, электрическое сопротивление которого изменяется в зависимости от температуры.
Высокая температура вызывает низкое сопротивление, а низкая температура охлаждающей жидкости вызывает высокое сопротивление. Контроллер выдает напряжение 5 В на цепь датчика температуры охлаждающей жидкости.
Датчик детонации (КД) установлен на блоке цилиндров (рис. 10).
Пьезокерамический чувствительный элемент ДД формирует сигнал переменного напряжения, амплитуда и частота которого соответствуют параметрам вибрации двигателя.
При детонации увеличивается амплитуда колебаний определенной частоты.
Контроллер одновременно корректирует угол опережения зажигания для гашения детонации.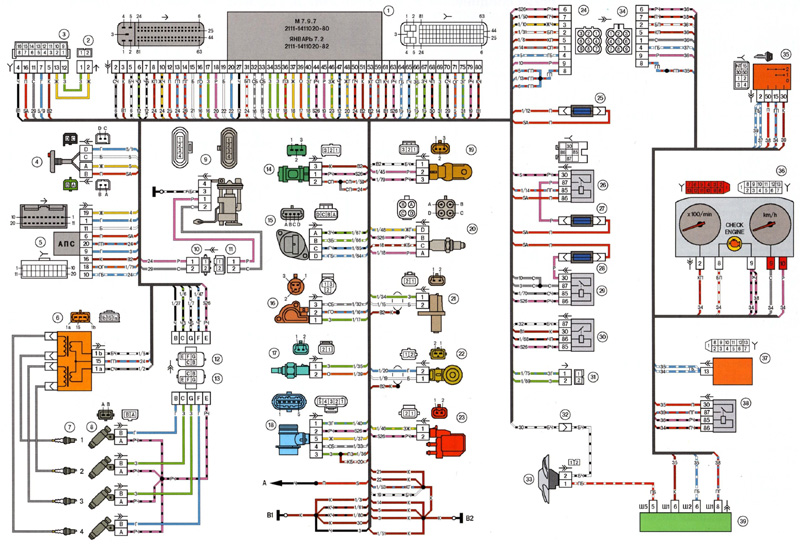
Датчик кислорода контрольный (УДК)
Наиболее эффективное снижение токсичности выхлопных газов бензиновых двигателей достигается при массовом соотношении воздуха и топлива в смеси (14,5…14,6): 1.
Это соотношение называется стехиометрическим.
При таком соотношении воздух-топливо каталитический нейтрализатор наиболее эффективно снижает количество углеводородов, моноксида углерода и оксидов азота, выбрасываемых с отработавшими газами.
Для оптимизации состава выхлопных газов с целью достижения наибольшей эффективности катализатора используется замкнутый контур управления подачей топлива с обратной связью по наличию кислорода в выхлопных газах.
Диагностический датчик кислорода (DOC)
Каталитический нейтрализатор используется для снижения содержания углеводородов, угарного газа и оксидов азота в выхлопных газах.
Нейтрализатор окисляет углеводороды и окись углерода, в результате чего они превращаются в пары воды и углекислый газ.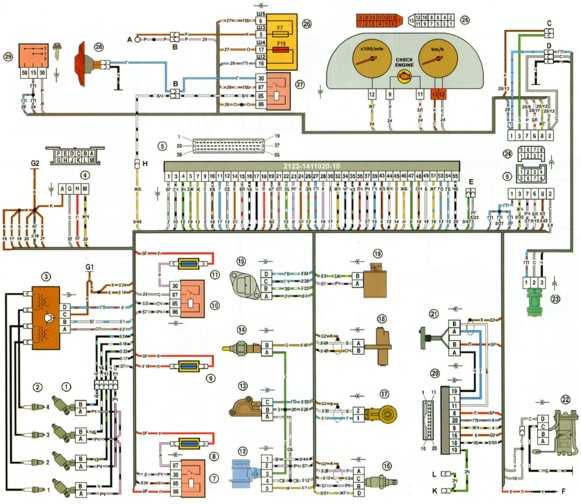
Нейтрализатор также извлекает азот из оксидов азота.
Контроллер контролирует окислительно-восстановительные свойства нейтрализатора, анализируя сигнал диагностического датчика кислорода, установленного после нейтрализатора.
Датчик скорости автомобиля выдает импульсный сигнал, информирующий контроллер о скорости автомобиля. ДСА устанавливается на первичный вал раздаточной коробки.
При вращении ведущих колес DSA формирует 6 импульсов на каждый метр движения автомобиля.
Контроллер определяет скорость автомобиля по частоте импульсов.
Датчик положения коленчатого вала устанавливается на крышке привода распределительного вала на расстоянии около 1 ± 0,4 мм от вершины зуба ведущего диска, установленного на коленчатом валу двигателя.
Ведущий диск интегрирован со шкивом привода генератора и представляет собой зубчатое колесо с 58 зубьями с шагом 6° и «длинной» зубчатой полостью, образованной двумя отсутствующими зубьями.
При совмещении середины первого зуба зубчатого сектора диска после «длинной» полости с осью ДПКВ коленчатый вал двигателя находится в положении 114° (19 зубьев) к ВМТ 1-й и 4-й цилиндры.
При вращении задающего диска магнитный поток в магнитопроводе датчика изменяется, вызывая в его обмотке импульсы напряжения переменного тока.
Контроллер определяет положение и частоту вращения коленчатого вала по количеству и частоте этих импульсов и рассчитывает фазу и длительность импульсов управления форсунками и катушкой зажигания.
Датчик фаз крепится на выступе головки блока цилиндров.
Принцип работы датчика основан на эффекте Холла.
На распредвале двигателя есть специальный штифт.
При прохождении штифта у торца датчика датчик выдает на контроллер импульс напряжения низкого уровня (около 0 В), что соответствует положению поршня 1-го цилиндра в такте сжатия.
Сигнал датчика фаз используется контроллером для организации последовательного впрыска топлива в соответствии с порядком работы цилиндров двигателя.
Выключатель стоп-сигнала является частью узла педали тормоза и предназначен для подачи соответствующих сигналов в ECM, когда водитель нажимает/отпускает педаль тормоза.
В системах управления дроссельной заслонкой по проводам (E-gas) сигналы переключателя педали тормоза играют важную роль, поскольку они используются функцией безопасности программного обеспечения ECM.
По этой причине очень важно следить за тем, чтобы выключатель стоп-сигнала всегда был в рабочем состоянии.
При несоответствии его функциональных характеристик переключения, например, при самопроизвольном изменении значений регулировок, указанных в инструкции (из-за вибраций педали тормоза, износа переключателя и педальный узел), двигатель автомобиля может перейти в аварийный режим с принудительно сниженной мощностью.
Датчик положения педали сцепления является частью узла педали сцепления и используется для подачи сигнала ECM о том, что педаль сцепления нажата.
Выключатель имеет одну группу контактов, коммутирующих напряжение с вывода «15» замка зажигания.
При нажатии на педаль сцепления контакты разомкнуты.
Сигнал переключателя положения педали сцепления используется программным обеспечением ECM для улучшения характеристик автомобиля.
Домашняя страница Маркоса Васа Саллеса
Постдокторская Проверьте блог Big Red Data |
Мой
исследования нацелены на создание масштабируемых систем, управляемых данными. я особенно люблю
внедрения методов управления данными в новые области, такие как поведенческие
симуляции, компьютерные игры и управление личной информацией. С точки зрения
С точки зрения
подход, я системно-ориентированный ученый-экспериментатор. В других
словами, я люблю создавать новые системы и использовать эксперименты для проверки их
характеристики.
От
Август 2011 года, я присоединяюсь в качестве доцента кафедры вычислительной техники
науки в Копенгагенском университете (DIKU).
Проекты
Компьютер
Игры и поведенческие симуляции : В этом проекте Cornell Database Group мы
разработка новой скриптовой платформы для игр и агентов
симуляции. Моя недавняя работа в этом проекте была связана с эффективным восстановлением контрольной точки.
методы для массовых многопользовательских онлайн-игр (MMO) и автоматических
методы распараллеливания для крупномасштабных поведенческих симуляций. в
первой линии работы, мы выполнили экспериментальную оценку нескольких
методы восстановления контрольной точки основной памяти с учетом всплесков задержки
которые они вводят в игру.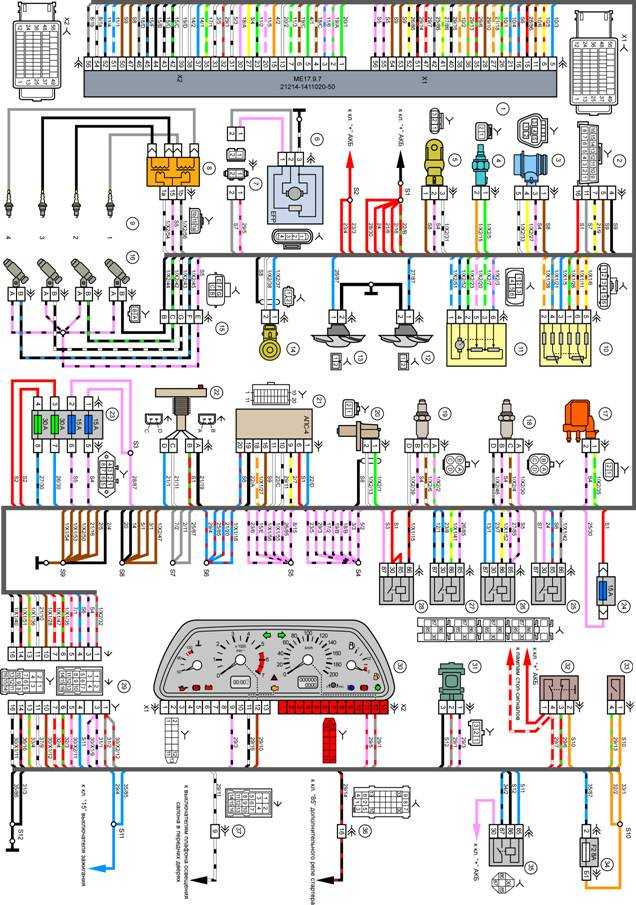 Для различных частот обновления нет
Для различных частот обновления нет
универсальный метод выигрыша, и мы изучаем новые методы для решения
Эта проблема. Во второй строке работы мы строим новый скрипт
движок для поведенческого моделирования под названием BRACE, основанный на Big Red Agent.
Вычислительный движок. BRACE сочетает в себе простоту программирования с простым
язык сценариев с масштабируемостью с помощью методов баз данных, таких как данные
параллелизм и индексация.
Пространства данных
и управление личной информацией : во время моей докторской диссертации в ETH Zurich Systems Group я работал
в системе управления пространством данных iMeMex,
гибридная архитектура интеграции информации, которая позволяет пользователям переходить
от поиска до интеграции данных с оплатой по мере использования. В отличие от традиционных
реляционная СУБД, iMeMex не берет на себя полный контроль над данными, но предлагает
услуги в сложном личном пространстве данных. Мы исследовали несколько
интересные темы в дизайне iMeMex, такие как определение единой модели данных для личной информации,
новая техника, основанная на картографических подсказках
(называемые тропами) для повышения уровня интеграции личной информации
со временем, а поиск по графикам
пользовательских данных, созданных определениями представлений.
Индексация : I
также рассмотрели более традиционные проблемы управления данными, в частности
изучение структур индексов для интенсивного чтения или записи
рабочие нагрузки. Для первого класса нагрузок я изучил экспериментально вместе с
сотрудников из Саарского университета и ETH Zurich, выступление одного
специфическая структура индекса, индекс Dwarf. Для второго класса рабочих нагрузок я
изучили, как отвечать на запросы по коллекциям движущихся объектов, например,
для отслеживания транспортных средств или моделирования на основе пространственных агентов. Проблема в
сложной задачей, потому что эти приложения имеют очень высокую скорость обновления, что приводит
от постоянного движения. Наша техника, ФИЛЬМЫ,
основан на частом перестроении моментальных снимков индекса в основной памяти. Использование данных
разбиение на несколько узлов в небольшом кластере, мы увеличили масштаб ФИЛЬМОВ
до 100 миллионов движущихся объектов по дорожной сети Германии, сохраняя при этом
задержка моментального снимка менее нескольких секунд.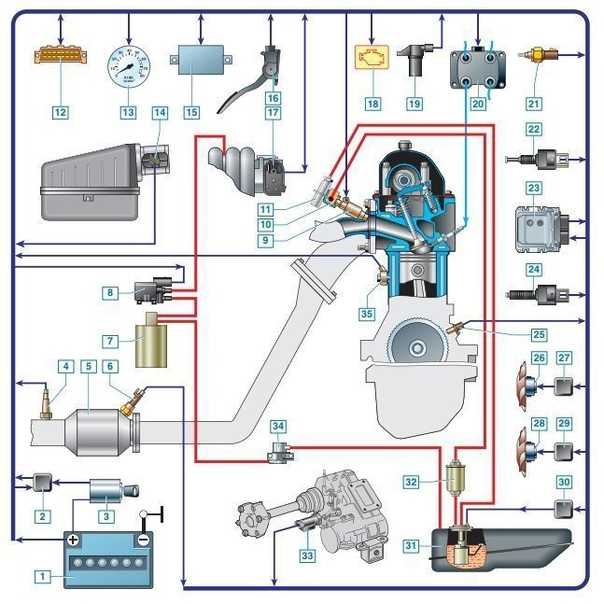
Выбранные публикации
Туан Цао, Маркос Вас Саллес,
Бенджамин Соуэлл, Яо Юэ, Алан Демерс, Йоханнес Герке, Уокер Уайт.
Алгоритмы быстрого восстановления контрольной точки для
Часто согласованные приложения.
SIGMOD 2011, Афины, Греция.
На конференции мы также
представить следующую демонстрацию в нашей библиотеке восстановления.
Туан Цао, Бенджамин Соуэлл, Маркос
Ваз Саллес, Алан Демерс, Йоханнес Герке.
BRRL: библиотека восстановления основной памяти
Приложения в облаке (демонстрационный документ).
SIGMOD 2011, Афины, Греция.
Йенс Диттрих, Лукас Блански,
Маркос Ваз Саллес.
ФИЛЬМЫ:
Индексирование движущихся объектов путем съемки индексных изображений.
GeoInformatica 2011, появится. Этот
бумага является расширенной версией SSTD 2009конференция
бумага.
Гуочжан Ван, Маркос Вас Саллес,
Бенджамин Соуэлл, Сюнь Ван, Туан Цао, Алан Демерс, Йоханнес Герке, Уокер
Белый.
Моделирование поведения в MapReduce .
VLDB 2010, Сингапур.
Маркос Антонио Вас Саллес, Йенс
Диттрих, Лукас Блански.
Преднамеренные ассоциации в пространствах данных .
[Полная версия].
ICDE 2010, Лонг-Бич, США.
Маркос Вас Саллес, Туан Цао,
Бенджамин Соуэлл, Алан Демерс, Йоханнес Герке, Кристоф Кох, Уокер Уайт.
Оценка восстановления контрольной точки для
Многопользовательские онлайн-игры .
VLDB 2009, Лион, Франция.
Йенс Диттрих, Маркос Антонио Вас Саллес,
Лукас Блански.
iMeMex: от поиска к интеграции информации
и Назад .
IEEE Data Engineering Bulleting
2009 г., Том. 32 № 2 (приглашенный доклад).
Йенс Диттрих, Лукас Блански, Маркос Антонио
Ваз Саллес.
Индексирование движущихся объектов с помощью краткосрочного
Одноразовые индексы .
SSTD 2009, Ольборг, Дания.
Йенс Диттрих, Лукас Блански, Маркос Антонио
Ваз Саллес.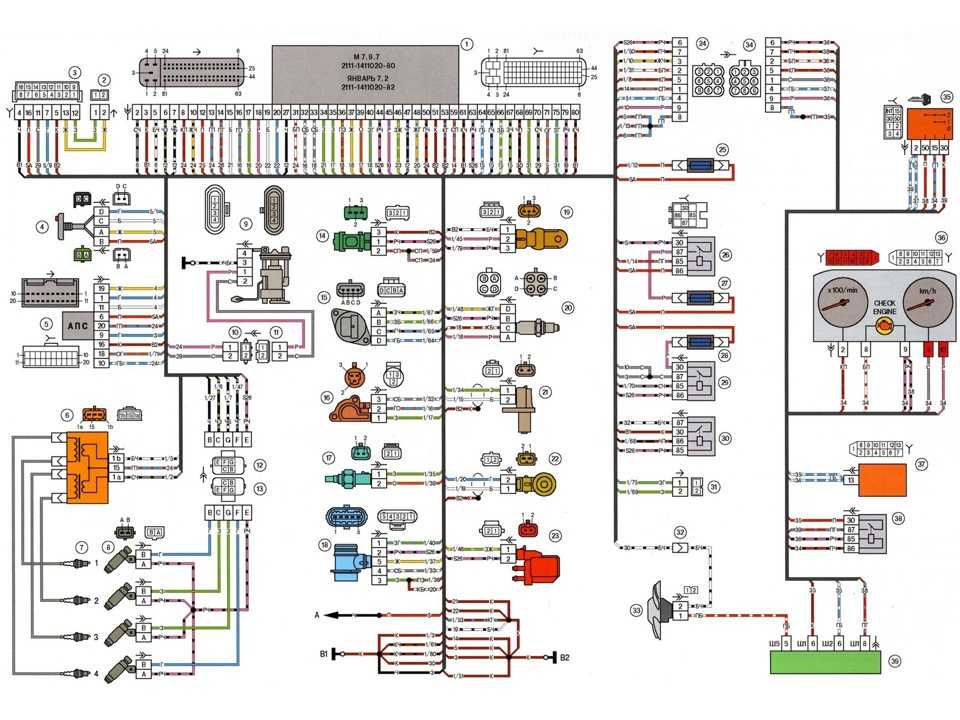
Карлики в зеркале заднего вида: насколько они велики
В самом деле?
VLDB 2008, Окленд, Новая Зеландия.
Маркос Антонио Вас Саллес, Йенс-Питер
Диттрих, Шант Киракос Каракашян, Оливье Рен Жирар, Лукас Блански.
iTrails: интеграция информации с оплатой по мере использования
в пространствах данных . [Слайды][Видео]
VLDB 2007, Вена, Австрия.
Лукас Блански, Йенс-Питер Диттрих, Оливье
Рен Жирар, Шант Киракос Каракашян, Маркос Антонио Вас Саллес.
Одиссея пространства данных: iMeMex Personal
Система управления пространством данных (демонстрационный документ) .
CIDR 2007, Асиломар, США.
Йенс-Питер Диттрих, Маркос Антонио Ваз
Саллес.
iDM: унифицированная и универсальная модель данных для
Управление персональным пространством данных .
VLDB 2006, Сеул, Южная Корея.
Йенс-Питер Диттрих, Маркос Антонио Ваз
Саллес, Дональд Коссманн, Лукас Блански.
iMeMex: побег из личной информации
Джунгли (демонстрационная статья) . [Плакат]
VLDB 2005, Тронхейм, Норвегия.
Обучение и наставничество
Прошлой осенью я преподавал Введение в базу данных
Системы (CS4320/1) в Корнельском университете. Раньше я преподавал
ассистент курсов по внедрению баз данных и хранению данных в ETH
Цюрих. Дома я также вел дополнительные курсы по настройке баз данных.
в Бразилии.
Я помогаю Йоханнесу Герке консультировать группу
талантливые аспиранты Корнелла, работающие над управлением данными для игр и
симуляции. Находясь в ETH Zurich, я совместно консультировал семь магистерских диссертаций и
10 семестровых проектов.
Здесь признательность моим наставникам:
Йоханнес Герке в Корнелле
Университет (постдок), Йенс
Диттрих (сейчас в Саарском университете) и Дональд Коссманн в ETH Zurich
(доктор философии), Сржио Лифшиц в
PUC-Rio (MSc) и Клаудия Баузер
Медейрос в UNICAMP (бакалавр наук).