Содержание
Электродвигатель переменного тока | Техника и человек
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться.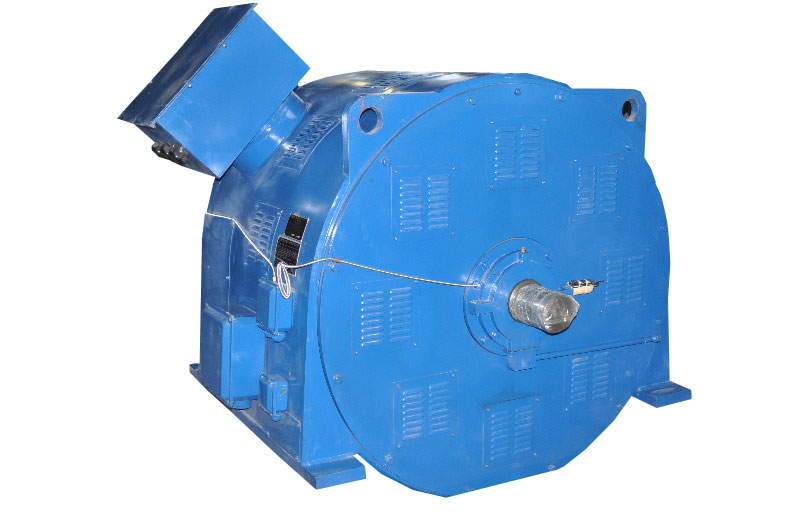 Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
ГЭУ переменного тока с синхронными гребными электродвигателями
Синхронные электродвигатели являются наиболее распространенным типом гребных двигателей в ГЭУ переменного тока. Это объясняется рядом существенных преимуществ синхронных гребных двигателей, таких, как более высокий к. п. д., достигающий 97,5%/т. е. на 3—5% выше, чем у асинхронных, меньшие масса и стоимость, работа в номинальных режимах при cos <р = 1. Большие воздушные зазоры синхронных двигателей, в несколько раз превытающие воздушные зазоры асинхронных электродвигателей, облегчают условия эксплуатации и ремонта подшипников ротора.
п. д., достигающий 97,5%/т. е. на 3—5% выше, чем у асинхронных, меньшие масса и стоимость, работа в номинальных режимах при cos <р = 1. Большие воздушные зазоры синхронных двигателей, в несколько раз превытающие воздушные зазоры асинхронных электродвигателей, облегчают условия эксплуатации и ремонта подшипников ротора.
Рис. 1. ГЭУ переменного тока с синхронным гребным электродвигателем.
На рис. 1 представлена принципиальная схема ГЭУ переменного тока с синхронным гребным электродвигателем. Для питания цепей возбуждения синхронного генератора Г и синхронного гребного электродвигателя Д предусматривается возбудительный агрегат, состоящий из возбудителя В и его приводного двигателя, в качестве которого обычно используются короткозамкнутые асинхронные электродвигатели АД, включаемые в судовую сеть переменного тока. Навешивание возбудителя на генераторный агрегат ГЭУ переменного тока недопустимо, так как синхронный генератор может работать с переменными угловыми скоростями для регулирования частоты тока в ГЭУ.
Помимо обмотки возбуждения, питаемой постоянным током от возбудителя, синхронные гребные электродвигатели имеют коротко-замкнутую пусковую обмотку, выполненную в виде беличьего колеса из медных или латунных стержней, замкнутых на кольцевые сегменты.
В период пуска гребного синхронного электродвигателя его обмотка возбуждения отключается от возбудителя — контакт К1 разомкнут. Вращающий момент в двигателе в период пуска обусловливается только пусковой обмоткой. Вследствие этого явления, протекающие при включении гребного синхронного двигателя на напряжение синхронного генератора, имеют полную аналогию с явлениями, протекающими при пуске асинхронного гребного электродвигателя, рассмотренными в предыдущем параграфе. Механическая характеристика в этот период аналогична механической характеристике асинхронного электродвигателя при Rpcr = О, так как пусковая обмотка ротора синхронного двигателя не имеет внешнего сопротивления, а замкнута накоротко.
Рассмотренный способ пуска гребного синхронного электродвигателя носит название асинхронного пуска синхронного двигателя.
После того как в процессе разгона с помощью пусковой обмотки синхронный двигатель достигнет угловой скорости, составляющей около 95% номинальной и носящей название подсинхронной скорости, контакт Д7 замыкается и обмотка возбуждения подключается на напряжение возбудителя. Магнитный поток обмотки возбуждения, расположенной на полюсах ротора, сцепляется с вращающимся магнитным потоком статора, и ротор втягивается в синхронизм: начинает вращаться с той же угловой скоростью, с какой вращается магнитное поле статора, т. е. с синхронной скоростью. На этом пуск гребного синхронного двигателя заканчивается.
На период пуска, когда гребной синхронный электродвигатель развивает вращающий момент только благодаря работе пусковой обмотки, обмотка возбуждения двигателя отключается контактом К1 от возбудителя, а контактом К2 включается на разрядное сопротивление R. В противном случае при больших скольжениях, т. е. при малых угловых скоростях ротора, в обмотке возбуждения двигателя будет наводиться недопустимо большое напряжение, опасное для изоляции.
Так как по окончании процесса пуска ротор синхронного двигателя, а следовательно, пусковая обмотка двигателя, вращается с той же скоростью, что и поле статора, то в пусковой обмотке э. Д. с. не наводится, ток не протекает и ее вращающий момент равен нулю.
Рис. 2. Векторная диаграмма синхронного двигателя.
Рис. 3. Угловая (о) и механическая (б) характеристики синхронного электродвигателя.
Угол в формуле вращающего момента синхронного двигателя носит название угла нагрузки. Действительно, с увеличением нагрузки на валу двигателя растет его ток, падение напряжения в сопротивлении статора и угол увеличиваются, как это видно из векторных диаграмм, приведенных на рис. 88. Зависимость вращающего момента синхронного двигателя от угла нагрузки, т. е. зависимость М = f (0), называется угловой характеристикой синхронного двигателя. Следует учесть, что вектор э. д. с. Е связан с полем ротора, а вектор напряжения U — с полем статора. Тогда из анализа угловой характеристики видно, что если ротор двигателя сместится относительно поля статора на угол более 90 эл. град, то его момент начнет убывать и двигатель выпадет из синхронизма. Максимальный момент, развиваемый синхронным двигателем в синхронном режиме работы, наступает при 0 = 90°.
град, то его момент начнет убывать и двигатель выпадет из синхронизма. Максимальный момент, развиваемый синхронным двигателем в синхронном режиме работы, наступает при 0 = 90°.
Описанные соотношения справедливы для неявнополюсного высокооборотного синхронного двигателя, однако без значительной погрешности они могут быть приняты и для явнополюсных двигателей, какими обычно являются гребные синхронные электродвигатели.
Таким образом, в синхронном режиме синхронный двигатель работает с постоянной угловой скоростью, равной синхронной угловой скорости поля статора. Механическая характеристика синхронного двигателя представлена на рис. 3, б.
Из этого уравнения видно, что скорость гребного синхронного двигателя можно регулировать только двумя способами: изменением числа пар полюсов р и изменением частоты напряжения, подводимого к двигателю.
Первый способ практически не применяется, так как он связан с усложнением конструкции гребного двигателя. Кроме того, этот способ дает возможность регулировать угловую скорость только ступенями при малом количестве ступеней.
Второй способ регулирования угловой скорости — изменением частоты — широко используется на практике. Однако, как уже известно, он связан с необходимостью изменения угловой скорости приводного двигателя синхронного генератора или установки преобразователя частоты.
Реверс гребного синхронного электродвигателя осуществляется путем переключения двух фаз обмотки статора с помощью реверсивного переключателя. В период реверсирования двигателя он работает с выключенным возбудителем ротора и все процессы протекают точно так же, как в ГЭУ с асинхронным гребным электродвигателем.
Из указанных для гребных асинхронных электродвигателей трех способов увеличения вращающего момента в период реверса для синхронного гребного электродвигателя приемлемы лишь два: уменьшение частоты и увеличение подводимого напряжения. Изменение формы механической характеристики с помощью сопротивления в цепи ротора для синхронного гребного электродвигателя неприемлемо, так как пусковая обмотка его замкнута накоротко.
В результате реверсирование гребного синхронного электродвигателя с короткозамкнутой пусковой обмоткой осуществляется в следующем порядке:
1) снижается угловая скорость приводных двигателей синхронных генераторов, тем самым снижается частота напряжения, подводимого к гребному электродвигателю;
2) снимается напряжение с обмотки возбуждения генераторов и гребного электродвигателя;
3) с помощью реверсивного переключателя переключаются две фазы гребного двигателя;
4) при снятом возбуждении на двигателе подается увеличенное возбуждение на генераторы;
5) после реверсирования вала гребного двигателя и разгона ротора двигателя до подсинхронной скорости, соответствующей пониженной частоте напряжения, в цепь возбуждения двигателя подается номинальное напряжение и двигатель втягивается в синхронизм;
6) напряжение возбуждения генераторов снижается до номинального, угловая скорость приводных двигателей и частота тока доводятся до номинальных значений.
Описанный порядок соответствует реверсированию гребного синхронного электродвигателя с полной угловой скорости в одном направлении до полной угловой скорости в обратном направлении.
В отдельных системах ГЭУ с синхронными гребными электродвигателями перед реверсированием, т. е. непосредственно перед переключением фаз статора двигателя, осуществляется его динамическое торможение. С этой целью статор гребного электродвигателя, отключенный от шин электродвижения, подключается на тормозное сопротивление, а в цепь возбуждения двигателя подается напряжение возбуждения. В таком режиме гребной двигатель работает как генератор, приводимый во вращение гребным валом, причем энергия вращения вала превращается в тепловую энергию в тормозном сопротивлении и рассеивается. Использование динамического торможения гребного синхронного электродвигателя перед реверсированием снижает величину тормозных моментов, потребных для изменения направления вращения гребного вала. Однако, как видно из описания процесса динамического торможения, система управления гребным двигателем в этом случае усложняется, так же как усложняются операции при реверсировании.
Обладая более высоким к. п. д., меньшими массой и стоимостью, чем другие ГЭУ переменного тока, гребные установки с синхронными электродвигателями наряду с этими положительными качествами имеют существенные недостатки. К ним относятся худшие, чем у асинхронных электродвигателей, пусковые характеристики гребных синхронных двигателей, меньшая перегрузочная способность. —
д., меньшими массой и стоимостью, чем другие ГЭУ переменного тока, гребные установки с синхронными электродвигателями наряду с этими положительными качествами имеют существенные недостатки. К ним относятся худшие, чем у асинхронных электродвигателей, пусковые характеристики гребных синхронных двигателей, меньшая перегрузочная способность. —
Давая общую оценку ГЭУ переменного тока с гребными синхронными электродвигателями, следует отметить, что этот тип ГЭУ более экономичен и надежен в эксплуатации, но имеет худшие маневренные качества, чем ГЭУ с гребными асинхронными электродвигателями.
Читать далее: Параллельная работа синхронных генераторов ГЭУ переменного тока
Категория
Судовые электростанции
9.
 3. Электродвигатели переменного тока — Энергетика: история, настоящее и будущее
3. Электродвигатели переменного тока — Энергетика: история, настоящее и будущее
Поскольку направление вращения электродвигателя не зависит от направления доставляемого ему тока, то каждый электродвигатель можно приводить в движение и переменным током. Однако в этом случае значительно уменьшается его мощность. Причина этого заключается в том, что переменный ток, проходя по обмотке электромагнитов, создает в сплошных сердечниках так называемые токи Фуко, на образование которых уходит значительная часть доставляемой к двигателю электрической энергии. Кроме того, у двигателей постоянного тока энергия возбуждения электромагнитов расходуется только один раз в начале действия, после чего намагничивание сердечников остается неизменным. В двигателе же переменного тока сердечники перемагничиваются при каждой перемене направления тока, на что затрачивается часть энергии. Уменьшить потери от токов Фуко пытались, делая сердечник не сплошным, а состоящим из отдельных изолированных друг от друга металлических полос. Однако это не дало приемлемого результата, а практическое применение поначалу получили лишь синхронные двигатели переменного тока.
Однако это не дало приемлемого результата, а практическое применение поначалу получили лишь синхронные двигатели переменного тока.
Особенность действия первых синхронных электродвигателей переменного тока состояла в том, что для поддержания вращения двигателя ему предварительно необходимо сообщить определенный вращательный момент, величина которого определялась частотой переменного тока. После этого переменный ток будет поддерживать частоту вращения двигателя, синхронную с частотой переменного тока. Если после этого придать двигателю тормозной момент, то в зависимости от величины этого момента вращение может либо восстановиться, либо постепенно затухнуть. Именно такой синхронный двигатель переменного тока «Ганца и К о» приведен на рис. 9.24.
Он состоит из кольцеобразного многополюсного магнита с изменяющимися под действием переменного тока полярностями, а также расположенного на оси вращающегося звездообразного электромагнита. Для возбуждения этого подвижного электромагнита рабочий переменный ток двигателя преобразуется в постоянный с помощью расположенного на оси специального коммутатора с токосъемными угольными щетками. В момент начального пуска такой двигатель приходит в действие как двигатель постоянного тока. И лишь при достижении им скорости, соответствующей синхронному ходу, начинает работать как синхронный двигатель переменного тока. Такая конструкция обеспечивала, по данным фирмы «Ганца и К о», коэффициент полезного действия до 80%, чего двигатели постоянного тока не достигали даже приблизительно. Кроме того, двигатель «Ганца и К о» не изменял своей скорости вращения при перемене нагрузки на валу, изменялась лишь величина потребляемого тока.
В момент начального пуска такой двигатель приходит в действие как двигатель постоянного тока. И лишь при достижении им скорости, соответствующей синхронному ходу, начинает работать как синхронный двигатель переменного тока. Такая конструкция обеспечивала, по данным фирмы «Ганца и К о», коэффициент полезного действия до 80%, чего двигатели постоянного тока не достигали даже приблизительно. Кроме того, двигатель «Ганца и К о» не изменял своей скорости вращения при перемене нагрузки на валу, изменялась лишь величина потребляемого тока.
Рис. 9.24. Синхронный двигатель переменного тока «Ганца и Ко»
Тем не менее, таким синхронным двигателям переменного тока присущ тот недостаток, что синхронность хода должна быть установлена до принятия нагрузки, после чего двигатель готов начать работу. При значительных перегрузках синхронность хода нарушалась, вплоть до полной остановки двигателя, что весьма ограничивало область его применения.
В 1870 г. была разработана конструкция асинхронных двигателей переменного тока, лишенных вышеуказанного недостатка. Появление такого двигателя, еще называемого индукционным, позволило при наличии систем распределения и трансформации переменного тока необыкновенно расширить сферу практического применения электрической энергии. В очень упрощенном виде принцип действия индукционных двигателей переменного тока основан на эффекте возникновения вращающегося магнитного поля, получаемого от действия двух переменных токов, сдвинутых по фазе на 1/4 часть периода (рис. 9.25).
Появление такого двигателя, еще называемого индукционным, позволило при наличии систем распределения и трансформации переменного тока необыкновенно расширить сферу практического применения электрической энергии. В очень упрощенном виде принцип действия индукционных двигателей переменного тока основан на эффекте возникновения вращающегося магнитного поля, получаемого от действия двух переменных токов, сдвинутых по фазе на 1/4 часть периода (рис. 9.25).
К открытию эффекта вращающегося магнитного поля в современном его понимании пришли независимо друг от друга итальянский ученый Галилео Феррарис и сербский ученый и изобретатель Николо Тесла. Способ получения вращающегося магнитного поля Феррарис нашел в 1885 году, а впервые сообщил о своем открытии в докладе Туринской академии наук в марте 1888 года. Двумя месяцами позже, в мае того же года, с изложением существа своих открытий в Американском институте инженеров-электриков выступил Тесла, хотя идея бесколлекторного электродвигателя переменного тока у него появилась ещё в 1882 году.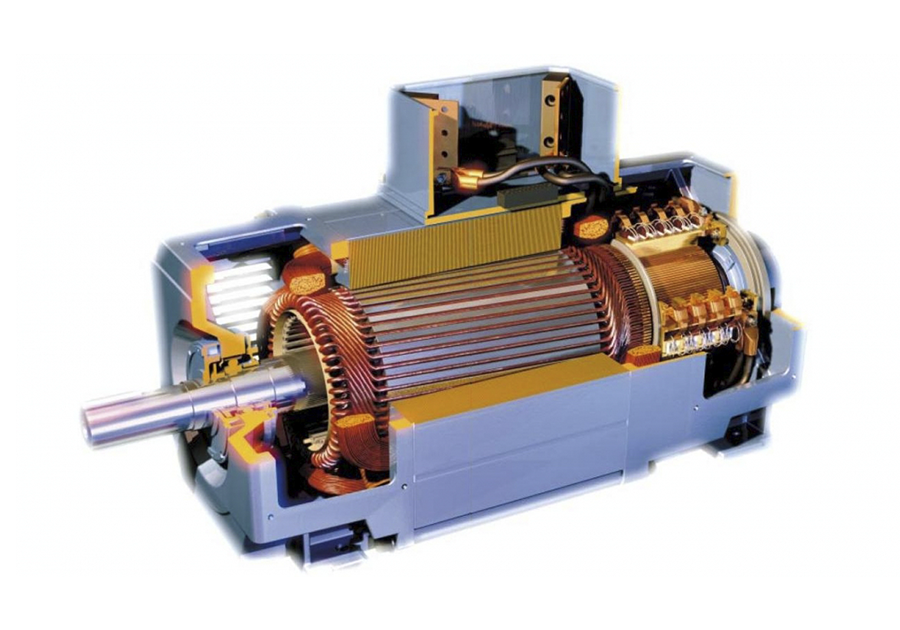
Николо Тесла (1856–1943) родился 10 июля 1856 года в селе Смиляны (ранее Австро-Венгрия, теперь Хорватия). В 1878 году окончил Политехнический институт в Граце и в 1880 году – Пражский университет. Работал инженером в Будапеште и Париже. Уехав в 1884 году в Нью-Йорк, Тесла организовал лабораторию и в 1888 году, исходя из принципа вращающегося магнитного поля, построил двухфазные генератор и электродвигатель переменного тока. В 1891 году сконструировал резонансный трансформатор трансформатор Тесла), позволяющий получать высокочастотные колебания напряжения, и первым указал на физиологическое воздействие токов высокой частоты. Он исследовал возможность беспроволочной передачи сигналов и энергии на значительные расстояния. В 1899 году публично продемонстрировал лампы и двигатели, работающие на высокочастотном токе без проводов. Построил радиостанцию в Колорадо и радиоантенну в Лонг-Айленде. Именем Теслы названа единица измерения плотности магнитного потока (магнитной индукции).
Рис. 9.25. Эффект возникновения вращающегося магнитного поля от действия двух переменных токов, сдвинутых по фазе на 1/4 часть периода
9.25. Эффект возникновения вращающегося магнитного поля от действия двух переменных токов, сдвинутых по фазе на 1/4 часть периода
Замечательным свойством двухфазных электрических машин (рис. 9.26) является возможность сообщить движение якорю без непосредственного подвода к нему переменного тока. Тем самым исчезает потребность в использовании скользящих контактов, коммутатора или коллектора. Фирма «Вестингауз», где работал Тесла, построила несколько станций по его системе. Наибольшей по масштабам была Ниагарская гидроэлектростанция, построенная в 1896 году, где были установлены такого рода двухфазные машины переменного тока. Однако экономические и технические трудности использования двухфазной системы привели через некоторое время к полной ее замене на трехфазную.
Недостатком электродвигателей Тесла было то, что они имели большое магнитное сопротивление и крайне неблагоприятное распределение намагничивающей силы вдоль воздушного зазора, что приводило к ухудшению характеристик машины. Неудачным оказался и выбор двухфазной системы токов из всех возможных многофазных систем. Встретившиеся экономические и технические трудности задерживали внедрение двухфазной системы в практику.
Неудачным оказался и выбор двухфазной системы токов из всех возможных многофазных систем. Встретившиеся экономические и технические трудности задерживали внедрение двухфазной системы в практику.
Рис. 9.26. Асинхронный электродвигатель переменного тока конструкции Тесла
Михаил Осипович Доливо-Добровольский (1862–1919), блестяще окончив курс Одесского реального училища, в 1880 году становится студентом Рижского политехнического института, решив посвятить себя деятельности инженера-механика. За участие в политических выступлениях студентов в марте 1881 года он был исключен из института без права поступления в какое-либо русское высшее учебное заведение. Электротехникой М.О. Доливо-Добровольский заинтересовался ещё в Рижском политехническом институте и при решении вопроса о продолжении своего обучения за пределами России он остановился на Дармштадтском высшем техническом училище. С осени 1881 г. по 1884 г. М.О. Доливо-Добровольский учился на машиностроительном факультете в Дармштадте, специально изучая электротехнику. Уже в ранних студенческих работах проявились выдающиеся инженерные способности ДоливоДобровольского. Он в совершенстве изучил постоянный ток и его применение и на последнем курсе в Дармштадте впервые предложил пусковую схему для шунтового двигателя постоянного тока, что оказало непосредственное и сильное влияние на развитие электрического привода на постоянном токе. В 1884 году, окончив с отличными оценками Дармштадтское высшее техническое училище, он поступил на работу конструктором на заводы электротехнической компании Т. Эдисона (впоследствии фирма AEG; с 1909 г. – директор этой фирмы). В 1887–1888 годах работал над усовершенствованием электромагнитных амперметров и вольтметров для измерения постоянного и переменного токов. Для различного рода измерительных приборов удачно применил принцип двигателя с вращающимся магнитным полем, создал приборы для устранения в телефонах помех от электрических сетей сильных токов, изобрел способ деления напряжения постоянного тока, основанный на применении неподвижной катушки индуктивности, которую назвал делителем напряжения.
Уже в ранних студенческих работах проявились выдающиеся инженерные способности ДоливоДобровольского. Он в совершенстве изучил постоянный ток и его применение и на последнем курсе в Дармштадте впервые предложил пусковую схему для шунтового двигателя постоянного тока, что оказало непосредственное и сильное влияние на развитие электрического привода на постоянном токе. В 1884 году, окончив с отличными оценками Дармштадтское высшее техническое училище, он поступил на работу конструктором на заводы электротехнической компании Т. Эдисона (впоследствии фирма AEG; с 1909 г. – директор этой фирмы). В 1887–1888 годах работал над усовершенствованием электромагнитных амперметров и вольтметров для измерения постоянного и переменного токов. Для различного рода измерительных приборов удачно применил принцип двигателя с вращающимся магнитным полем, создал приборы для устранения в телефонах помех от электрических сетей сильных токов, изобрел способ деления напряжения постоянного тока, основанный на применении неподвижной катушки индуктивности, которую назвал делителем напряжения. Последние годы своей жизни М.О. Доливо-Добровольский был занят мыслью о передаче энергии на большие расстояния. Свои взгляды по этому вопросу он изложил в обстоятельном докладе «О пределах возможности передачи энергии на расстояние переменным током». Смерть М.О. Доливо-Добровольского 15 ноября 1919 года прервала его работы в самом разгаре.
Последние годы своей жизни М.О. Доливо-Добровольский был занят мыслью о передаче энергии на большие расстояния. Свои взгляды по этому вопросу он изложил в обстоятельном докладе «О пределах возможности передачи энергии на расстояние переменным током». Смерть М.О. Доливо-Добровольского 15 ноября 1919 года прервала его работы в самом разгаре.
Рис. 9.27. Двигатель трехфазного переменного тока мощностью в 100 л.с. конструкции Доливо-Добровольского
Рис. 9.28. Отделение электродвигателей переменного тока на заводе Шуккерта в Нюрнберге
Более совершенной электрической системой оказалась трехфазная. Наибольшая заслуга среди ученых и инженеров разных стран (немец Ф. Хазельвандер, француз М. Депре, американец Ч. Бредли) принадлежит русскому электротехнику Михаилу Осиповичу ДоливоДобровольскому, сумевшему придать своим работам практический характер, создавшему трехфазные асинхронные двигатели, трансформаторы, разработавшему четырехи трехпроводную цепи. Его по праву считают основоположником трехфазных систем.
Доливо-Добровольский усовершенствовал двигатель Тесла, используя три сдвинутых по фазе переменных тока вместо двух. В 1888 году он построил первый трехфазный генератор переменного тока мощностью около 3 кВт, от которого привел в действие свой первый трехфазный двигатель со статором в виде кольца Грамма и ротором в виде сплошного медного цилиндра. Дальнейшие работы привели его к построению асинхронного трехфазного двигателя с ротором из литого железа с насаженным полым медным цилиндром. В 1889 году конструкция асинхронного электродвигателя была значительно улучшена применением ротора типа «беличьего колеса». Опытная установка такой машины поражала всех электротехников своими небольшими размерами при заданной мощности трехфазного электродвигателя. На рис. 9.27 показан двигатель трехфазного переменного тока мощностью в 100 л.с. конструкции ДоливоДобровольского.
Одновременно М.О. Доливо-Добровольский исследовал соединения звездой и треугольником, экспериментировал с токами различных напряжений и с машинами, имеющими разное число пар полюсов, разработал все элементы трехфазных цепей переменного тока: трансформаторы трехфазного тока (1890), пусковые реостаты, измерительные приборы, схемы включения генераторов и двигателей звездой и треугольником.
На рис. 9.28 приведен общий вид цеха по производству электродвигателей переменного тока на заводе Шуккерта в Нюрнберге. С изобретением трехфазной системы переменного тока такие электродвигатели в дальнейшем получили массовое распространение во всем мире.
Синхронный и асинхронный двигатель. Что такое синхронный двигатель
Синхронный двигатель, в отличии от своего асинхронного собрата, имеет постоянную частоту вращения при разнообразных нагрузках. Часто такие приборы применяют для приводов машин, которые работают с постоянной неизменной скоростью (например, компрессоры, вентиляторы, насосы и прочее).
Как устроен синхронный двигатель?
В статоре такого электроприбора имеется обмотка, которая подключается к сетям трехфазного тока. Она образует собой магнитное поле, которое вращается. Ротор у такой электроэнергетической машины, как синхронный двигатель, состоит из сердечника и обмотки возбуждения. Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле. Синхронная машина (а двигатель довольно просто переделать в генератор, так как двигатель преобразует электрическую энергию в механическую, а генератор — наоборот, механическую в электроэнергию) обычно работает на переменном токе. На сегодняшний день есть разработки такого устройства, как синхронный двигатель переменного тока. Однако в большинстве случаев для его собственных нужд используют аккумуляторные батареи переменного тока, благодаря которым постоянный ток выпрямляется специальными приборами до состояния, аналогичного постоянному (то есть неизменному во времени значению).
Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле. Синхронная машина (а двигатель довольно просто переделать в генератор, так как двигатель преобразует электрическую энергию в механическую, а генератор — наоборот, механическую в электроэнергию) обычно работает на переменном токе. На сегодняшний день есть разработки такого устройства, как синхронный двигатель переменного тока. Однако в большинстве случаев для его собственных нужд используют аккумуляторные батареи переменного тока, благодаря которым постоянный ток выпрямляется специальными приборами до состояния, аналогичного постоянному (то есть неизменному во времени значению).
Синхронный двигатель и его разновидности
В основном все отличия в конструктивном исполнении такого устройства — это модификации вращающейся детали. Ротор синхронной машины может быть с явно выраженными полюсами (его обычно называют «явнополюсный»), и с неявно выраженными полюсами (так называемый «неявнополюсный»). Явнополюсный ротор обычно имеет ярко выраженные, выступающие полюса, на которых размещаются катушки возбуждения. Неявнополюсный ротор обычно представляет собой цилиндр из ферромагнитного сплава, на поверхности которого фрезеруют пазы в осевом направлении. Впоследствии именно в эти пазы укладывают обмотки возбуждения.
Синхронный двигатель и принцип его работы
Магнитное поле статора, которое вращается, намагничивает ротор. Синхронный двигатель с постоянными магнитами имеет разное электромагнитное сопротивление по поперечной и продольной осям полюсов. Силовые линии у магнитного поля обмотки статора начнут изгибаться, потому что они будут как бы стремиться найти пути с наименьшим сопротивлением. Вследствии специфических свойств силовых магнитных линий поля, в свою очередь, такая деформация его вызовет реактивный момент. Именно поэтому ротор будет вращаться синхронно вместе с магнитным полем статора.
Синхронный двигатель и его особенности
Нельзя не упомянуть о некоторых специфических моментах. Например, о том, что у таких машин нет пускового момента. Это происходит по той причине, что из-за своей инертности ротор просто не успевает развить нужное количество оборотов. Поэтому в настоящее время часто применяют асинхронный пуск таких двигателей.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это . Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети. Ниже дана формула синхронной скорости:
Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети. Ниже дана формула синхронной скорости:
В принципе, его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока (в этом мы разберёмся позже). А пока рассмотрим основное строение данного типа двигателя.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.

- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.

Видео: Строение и принцип работы синхронного двигателя
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – –), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя.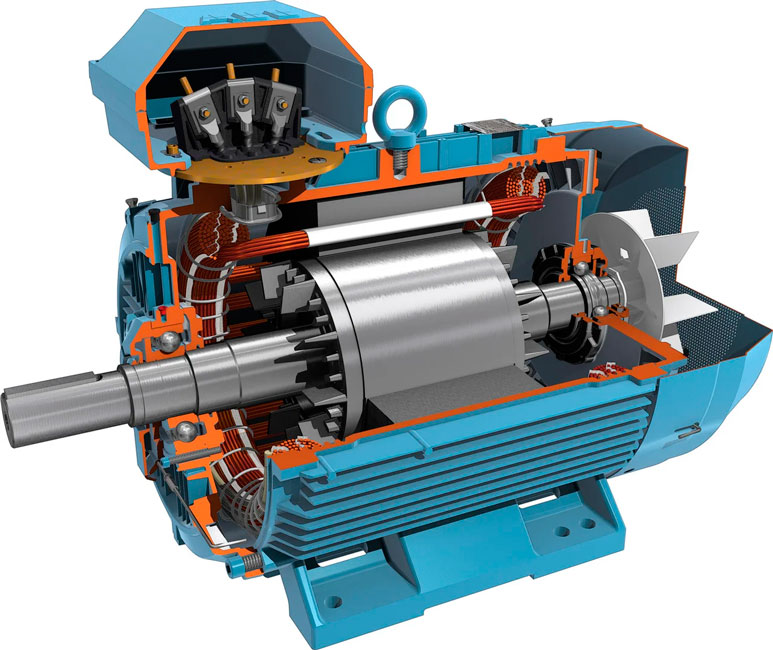 Он не самозапускающийся.
Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
 Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
 Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.

В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также моторы отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть .
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения.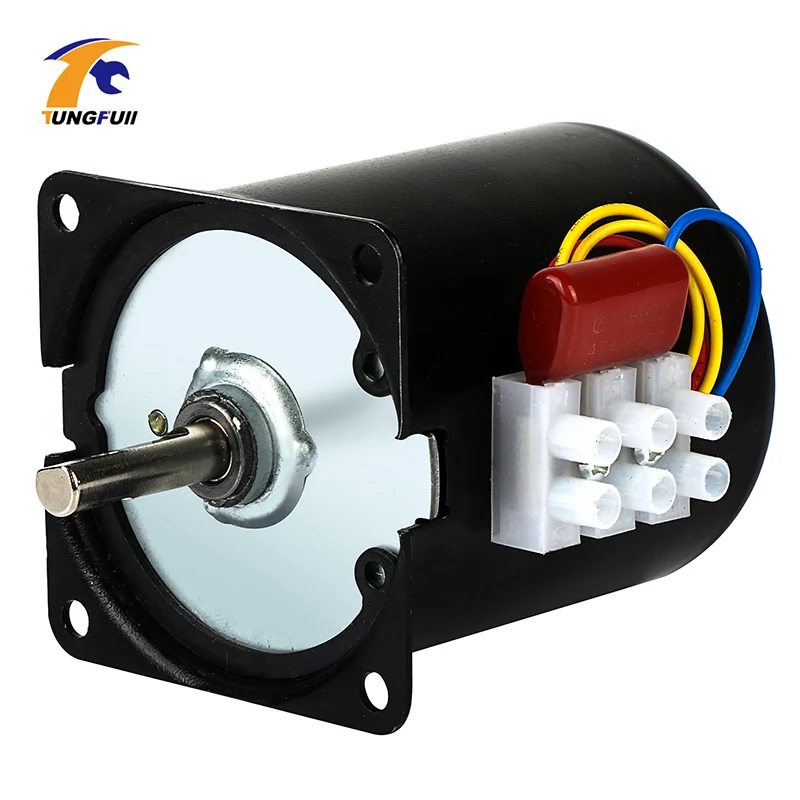 Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Чем синхронный двигатель от асинхронного отличается такой вопрос часто задают на различных форумах.
Чем синхронный от асинхронного двигателя отличается
Основное отличие в том, что у асинхронного двигателя скорость вращения ротора всегда меньше, скорости вращения магнитного поля в то время как у синхронного же двигателя скорость ротора или равна или в особенных случаях конструкции кратна скорости ротора.
А так много отличий на самомм деле, но это самые основные из-за них они собственно говоря так и называются.
Асинхронные
двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
Т.е это достаточно дешевый двигатель/, который применяется везде, синхронную машину найти крайне тяжело.
В отличие от асинхронного двигателя частота вращения синхронного
двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы) ими легко управлять.
Отличить можно по количеству оборотав на табличке (если там явно неуказан тип машины), у ассинхронников не круглое число оборотов, 950 об/мин у синхронной машины 1000 об/мин.
электродвигател- Все, что вам следует знать об электрических двигателях
Двигатели используются в широком спектре применений, таких как вентиляторы, электроинструменты, бытовая техника, электромобили и гибридные автомобили. Электродвигатель — это устройство, используемое для преобразования электроэнергии в механическую энергию, противоположную электрическому генератору. Существует множество вариантов и опций электродвигателей; например, двигатели постоянного тока – щеточные или бесщеточные, а двигатели переменного тока – асинхронные (или асинхронные) и синхронные.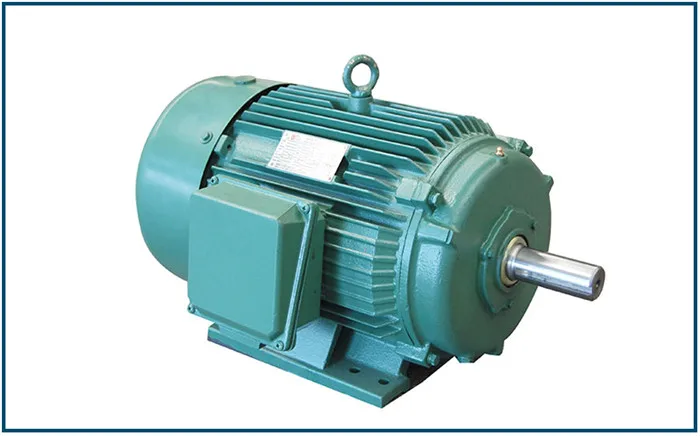 Двигатели могут работать при различных напряжениях в зависимости от области применения и доступных источников питания.
Двигатели могут работать при различных напряжениях в зависимости от области применения и доступных источников питания.
Электродвигатель — это устройство, используемое для преобразования электроэнергии в механическую энергию, противоположную электрическому генератору. Они работают, используя принципы электромагнетизма, который показывает, что сила прилагается, когда в магнитном поле присутствует электрический ток. Эта сила создает крутящий момент на проволочной петле, находящейся в магнитном поле, что заставляет двигатель вращаться и выполнять полезную работу. Двигатели используются в широком спектре применений, таких как вентиляторы, электроинструменты, бытовая техника, электромобили и гибридные автомобили.
Электродвигатель
Существует множество вариантов и опций электродвигателей; например, двигатели постоянного тока – щеточные или бесщеточные, а двигатели переменного тока – асинхронные (или асинхронные) и синхронные. Двигатели могут работать при различных напряжениях в зависимости от области применения и доступных источников питания.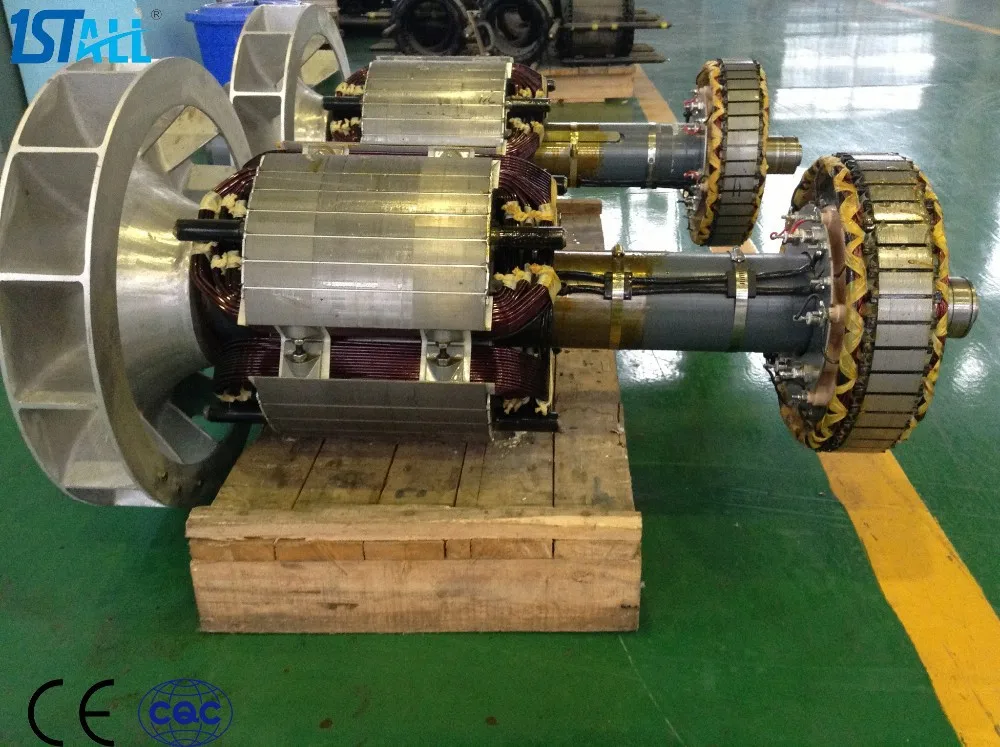
Работа двигателя зависит от двух свойств электрического тока. Первый заключается в том, что электрический ток, протекающий по проводу или катушке, создаст магнитное поле.
Во-вторых, изменение тока в проводнике, например, от источника переменного тока, вызовет напряжение в проводнике (самоиндуктивность) или во вторичном проводнике (взаимная индуктивность). Ток, протекающий в цепи вторичного проводника, также создает магнитное поле, как описано выше.
Для магнита подобные полюса отталкиваются, а непохожие полюса притягиваются. Во всех двигателях конструкция использует это свойство для обеспечения непрерывного вращения ротора.
🔰 Различные части электродвигателя и их функции
- Катушка якоря: Она помогает двигателю работать.
- Коммутатор: Это вращающийся интерфейс катушки якоря с неподвижной цепью.
- Сердечник якоря: Удерживает катушку якоря на месте и обеспечивает механическую поддержку.
- Источник питания: Простой двигатель обычно имеет источник питания постоянного тока. Он подает питание на якорь двигателя или катушки возбуждения.
- Полевой магнит: Магнитное поле помогает создавать крутящий момент на вращающейся катушке якоря в силу правила левой руки Флеминга.
- Щетки: Это устройство, которое проводит ток между неподвижными проводами и движущимися частями, чаще всего вращающимся валом
 Он подает питание на якорь двигателя или катушки возбуждения.
Он подает питание на якорь двигателя или катушки возбуждения.🔰 Как Работают Электродвигатели
Узнайте, как работает электродвигатель, основные детали, почему и где они используются, а также примеры работы. Это электрический двигатель. Это одно из самых важных устройств, когда-либо изобретенных. Эти двигатели используются повсюду — от перекачки воды, которую мы пьем, до питания лифтов и кранов, даже охлаждения атомных электростанций. Итак, мы собираемся заглянуть внутрь одного из них и подробно узнать, как именно они работают в этой статье.
элементы Электродвигатели
Чтобы лучше понять работу электродвигателя, сначала мы рассмотрим, как работает электродвигатель — в теории, затем мы проверим его на практике.
🔸 Как работает электродвигатель — в теории
Предположим, мы согнем наш провод в квадратную U-образную петлю, так что фактически через магнитное поле проходят два параллельных провода. Один из них отводит от нас электрический ток по проводу, а другой возвращает ток обратно. Поскольку ток в проводах течет в противоположных направлениях, правило левой руки Флеминга говорит нам, что два провода будут двигаться в противоположных направлениях. Другими словами, когда мы включаем электричество, один из проводов будет двигаться вверх, а другой — вниз.
Если бы катушка провода могла продолжать двигаться таким образом, она вращалась бы непрерывно — и мы были бы на пути к созданию электродвигателя.
Но этого не может произойти при нашей нынешней настройке: провода быстро запутаются. И не только это, но если бы катушка могла вращаться достаточно далеко, произошло бы что-то еще. Как только катушка достигнет вертикального положения, она перевернется, так что электрический ток будет проходить через нее в противоположную сторону. Теперь силы с каждой стороны катушки поменялись бы местами. Вместо того, чтобы непрерывно вращаться в одном и том же направлении, он будет двигаться назад в том направлении, в котором только что пришел! Представьте себе электрический поезд с таким двигателем: он будет постоянно двигаться вперед и назад на месте, фактически никуда не двигаясь.
Теперь силы с каждой стороны катушки поменялись бы местами. Вместо того, чтобы непрерывно вращаться в одном и том же направлении, он будет двигаться назад в том направлении, в котором только что пришел! Представьте себе электрический поезд с таким двигателем: он будет постоянно двигаться вперед и назад на месте, фактически никуда не двигаясь.
🔸 Как работает электродвигатель — на практике
Есть два способа решить эту проблему. Один из них — использовать электрический ток, который периодически меняет направление, известный как переменный ток (AC). В небольших двигателях с батарейным питанием, которые мы используем дома, лучшим решением является добавление компонента, называемого коммутатором, к концам катушки.
В своей простейшей форме коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины, и его задача — реверсировать электрический ток в катушке каждый раз, когда катушка вращается на пол-оборота. Один конец катушки прикреплен к каждой половине коммутатора. Электрический ток от аккумулятора подключается к электрическим клеммам двигателя.
Электрический ток от аккумулятора подключается к электрическим клеммам двигателя.
Они подают электроэнергию в коммутатор через пару незакрепленных соединителей, называемых щетками, сделанных либо из кусочков графита (мягкий углерод, похожий на «грифель» карандаша), либо из тонких кусков упругого металла, который (как следует из названия) «задевает» коммутатор. Когда коммутатор установлен, при прохождении электричества по цепи катушка будет постоянно вращаться в одном и том же направлении.
как работает электродвигатель
Такой простой экспериментальный мотор, как этот, не способен вырабатывать большую мощность. Мы можем увеличить вращающую силу (или крутящий момент), которую может создать двигатель, тремя способами: либо у нас может быть более мощный постоянный магнит, либо мы можем увеличить электрический ток, текущий через провод, либо мы можем сделать катушку так, чтобы она много «витков» (петель) очень тонкой проволоки вместо одного «витка» толстой проволоки. На практике в двигателе постоянный магнит также имеет изогнутую круглую форму, поэтому он почти касается катушки с проволокой, которая вращается внутри него. Чем ближе друг к другу магнит и катушка, тем большую силу может создать двигатель.
Чем ближе друг к другу магнит и катушка, тем большую силу может создать двигатель.
Хотя мы описали несколько различных деталей, вы можете представить себе двигатель как состоящий всего из двух основных компонентов:
- По краю корпуса двигателя расположен постоянный магнит (или магниты), который остается неподвижным, поэтому он называется статором двигателя.
- Внутри статора находится катушка, установленная на оси, которая вращается с высокой скоростью — и это называется ротором. Ротор также включает в себя коллектор.
🔰 Как выбрать между двигателем переменного тока и двигателем постоянного тока?
Эти два типа двигателей построены по-разному:
Наиболее принципиальным отличием является источник питания: переменный ток (однофазный или трехфазный) и постоянный ток, например, для батарей.
Скорость — еще одно отличие. Скорость двигателя постоянного тока регулируется изменением тока в двигателе, в то время как скорость двигателя переменного тока регулируется изменением частоты, обычно с помощью преобразователя частоты (вы можете читать о двухскоростью двигатели в другой стати) .
Двигатель постоянного и переменного тока
🔸 Двигатели переменного тока
Двигатели переменного тока являются наиболее популярными в отрасли, так как они обладают рядом преимуществ:
- Они просты в постройке
- Они более экономичны из-за более низкого пускового потребления
- Они также более прочные и поэтому, как правило, имеют более длительный срок службы
- Они не требуют особого ухода
Из-за того, как они работают, что включает синхронизацию между вращением ротора и частотой тока, скорость двигателей переменного тока остается постоянной. Они особенно подходят для применений, требующих непрерывного движения и небольшого количества переключений передач. Поэтому этот тип двигателя идеально подходит для использования в насосах, конвейерах и вентиляторах.
Их также можно интегрировать в системы, не требующие высокой точности, если они используются с регулируемой скоростью.
С другой стороны, функции управления скоростью делают их более дорогими, чем другие двигатели.
Есть два типа двигателей переменного тока: однофазные и трехфазные.
🔷 Однофазные двигатели характеризуются:
⭕ Эффективность.
⭕ Их можно использовать в бытовой электросети.
⭕ Менее промышленные, поскольку они менее мощные.
⭕ Количество полюсов, которое даст скорость вращения.
⭕ Способ крепления: фланец (B14, B5) или кронштейны (B3).
⭕ Электрическая мощность (в кВт), которая будет определять крутящий момент.
🔷 Трехфазные двигатели характеризуются:
⭕ Их использование в промышленных условиях (около 80 %)
⭕ Их использование для инфраструктуры и оборудования, требующего высокой электрической мощности
⭕ Архитектура, которая позволяет передавать гораздо большую электрическую мощность, чем двигатель с однофазным напряжением
🔸 Двигатели постоянного тока
✔️ Двигатели постоянного тока также очень распространены в промышленных условиях, поскольку они обладают значительными преимуществами в зависимости от формата:
🟢 Они точны и быстры.
🟢 Пусковой момент высок.
🟢 Запуск, остановка, ускорение и разворот выполняются быстро.
🟢 Их скорость можно регулировать, изменяя напряжение питания.
🟢 Они просты в установке, даже в мобильных (работающих на батарейках) системах.
Они очень хорошо подходят для динамических применений, требующих высокой точности, особенно с точки зрения скорости, как в случае лифтов, или с точки зрения положения, как в случае роботов или станков. Они также могут быть полезны для применений, требующих высокой мощности (например, 10 000 кВт).
❌ Однако они имеют определенные недостатки в зависимости от их конструкции по сравнению с двигателями переменного тока:
🔴 Они состоят из множества деталей, которые изнашиваются и требуют дорогостоящей замены.
🔴 Они менее распространены, потому что они менее подходят для применений, требующих высокой мощности.
🔰 Наиболее распространенный тип двигателя
Существует много типов двигателей постоянного тока, но наиболее распространенными являются щеточные или бесщеточные. Существуют также вибрационные двигатели, шаговые двигатели и серводвигатели. мы должни сказат здест что бесщетоный двигатель лучше у аккумуляторного шуруповерта.
Существуют также вибрационные двигатели, шаговые двигатели и серводвигатели. мы должни сказат здест что бесщетоный двигатель лучше у аккумуляторного шуруповерта.
Щеточный и бесщеточный двигатель.
🔸 Бесщеточные двигатели постоянного тока
Бесщеточные двигател постоянного тока используют постоянные магниты в своем роторном узле. Они популярны на рынке хобби для применения в самолетах и наземных транспортных средствах. Они более эффективны, требуют меньшего обслуживания, производят меньше шума и имеют более высокую плотность мощности, чем двигатели постоянного тока с щеткой.
Они также могут быть серийного производства и напоминать двигатель переменного тока с постоянной частотой вращения, за исключением питания от постоянного тока. Однако есть несколько недостатков, которые включают в себя то, что ими трудно управлять без специального регулятора, и они требуют низких пусковых нагрузок и специализированных коробок передач в приводных приложениях, что приводит к более высоким капитальным затратам, сложности и экологическим ограничениям.
🔸 Щеточные двигатели постоянного тока
Щеточные двигатели براشпостоянного тока являются одними из самых простых и встречаются во многих бытовых приборах, игрушках и автомобилях.
Они используют контактные щетки, которые соединяются с коммутатором для изменения направления тока.
Они недороги в производстве, просты в управлении и обладают отличным крутящим моментом на низких скоростях (измеряется в оборотах в минуту или оборотах в минуту).
Несколько недостатков заключаются в том, что они требуют постоянного технического обслуживания для замены изношенных щеток, имеют ограниченную скорость из-за нагрева щетки и могут генерировать электромагнитный шум от дугового разряда щетки.
🔰 Каковы стандарты энергоэффективности для электродвигателей?
Производители все чаще задумываются об энергоэффективности. Более зеленая и экологически чистая экономика — одна из целей Конференции Организации Объединенных Наций по изменению климата 2015 года, которую взяли на себя многие государства. Но прежде всего в целях ограничения потребления и экономии в последние годы промышленность приобретает более энергоэффективное оборудование.
Но прежде всего в целях ограничения потребления и экономии в последние годы промышленность приобретает более энергоэффективное оборудование.
Согласно исследованию Европейской комиссии, на двигатели приходится 65% промышленного потребления энергии в Европе. Поэтому принятие мер в отношении двигателей является важным шагом на пути к сокращению выбросов CO2. Комиссия даже прогнозирует, что к 2020 году можно повысить энергоэффективность двигателей европейского производства на 20–30%. В результате будет на 63 миллиона тонн меньше CO2 в атмосфере и на 135 миллиардов киловатт-часов.
Стандартные электродвигатели
Если вы также хотите интегрировать энергоэффективные двигатели и получать экономию, внося свой вклад в развитие планеты, вам сначала нужно будет ознакомиться со стандартами энергоэффективности для двигателей в вашей стране или географическом регионе. Но будьте осторожны, эти стандарты применимы не ко всем двигателям, а только к асинхронным электродвигателям переменного тока.
🔰 Международные стандарты
Международная электротехническая комиссия (МЭК) определила классы энергоэффективности для электродвигателей, представленных на рынке, известные как код IE, которые обобщены в международном стандарте МЭК
МЭК определил четыре уровня энергоэффективности, которые определяют энергетические характеристики двигателя:
- IE1 относится к СТАНДАРТНОЙ-эффективности
- IE2 относится к ВЫСОКОЙ-эффективности
- IE3 означает ПРЕМИУМ-эффективность
- IE4, все еще находящийся в стадии изучения, обещает СУПЕР-ПРЕМИАЛЬНУЮ эффективность
МЭК также внедрила стандарт IEC 60034-2-1: 2014 для испытаний электродвигателей. Многие страны используют национальные стандарты испытаний, а также ссылаются на международный стандарт IEC 60034-2-1.
Товары из категорий🛠
✔️ В Европе
ЕС уже принял несколько директив, направленных на снижение энергопотребления двигателей, включая обязательство производителей размещать на рынке энергоэффективные двигатели:
Поэтому с 2011 года класс IE2 является обязательным для всех двигателей.
Класс IE3 является обязательным с января 2015 года для двигателей мощностью от 7,5 до 375 кВт (или IE2, если эти двигатели имеют преобразователь частоты).
Класс IE3 является обязательным с января 2017 года для двигателей мощностью от 0,75 до 375 кВт (или IE2, если эти двигатели имеют преобразователь частоты).
✔️ В Соединенных Штатах
В Соединенных Штатах действуют стандарты, определенные Американской ассоциацией NEMA (Национальная ассоциация производителей электротехники). С 2007 года минимальный требуемый уровень установлен на уровне IE2.
Та же классификация применима к Австралии и Новой Зеландии.
✔️ Азия
В Китае корейские стандарты MEPS (Минимальный стандарт энергоэффективности) применяются к малым и средним трехфазным асинхронным двигателям с 2002 года (GB 18693). В 2012 году стандарты MEPS были согласованы со стандартами IEC, перейдя от IE1 к IE2, а теперь и к IE3.
Япония согласовала свои национальные правила с классами эффективности IEC и включила электродвигатели IE2 и IE3 в свою программу Top Runner в 2014 году. Представленная в 1999 году программа Top Runner заставляет японских производителей постоянно предлагать на рынке новые модели, которые являются более энергоэффективными, чем предыдущие поколения, тем самым стимулируя эмуляцию и инновации в области энергетики.
Представленная в 1999 году программа Top Runner заставляет японских производителей постоянно предлагать на рынке новые модели, которые являются более энергоэффективными, чем предыдущие поколения, тем самым стимулируя эмуляцию и инновации в области энергетики.
В Индии с 2009 года действует знак сравнительной эффективности, а с 2012 года — национальный стандарт на уровне IE2.
Каковы критерии выбора электродвигателя?
Электродвигатели позволяют выполнять различные типы движения: быстрое, точное, непрерывное, с переключением передач или без него и т. Д. Для всех этих приложений требуются собственные двигатели.
Применение электродвигателей
Во-первых, вы должны выбрать одну из трех основных групп электродвигателей:
💠 Асинхронный двигатель переменного тока (однофазный или трехфазный)
💠 Синхронный двигатель: двигатель постоянного тока (постоянного тока), бесщеточный и др.
Чтобы выбрать между этими группами, необходимо определить тип требуемого приложения, поскольку это повлияет на ваш выбор:
Если вы хотите, чтобы ваш двигатель работал непрерывно и с небольшим количеством переключений передач, вам следует выбрать асинхронный двигатель.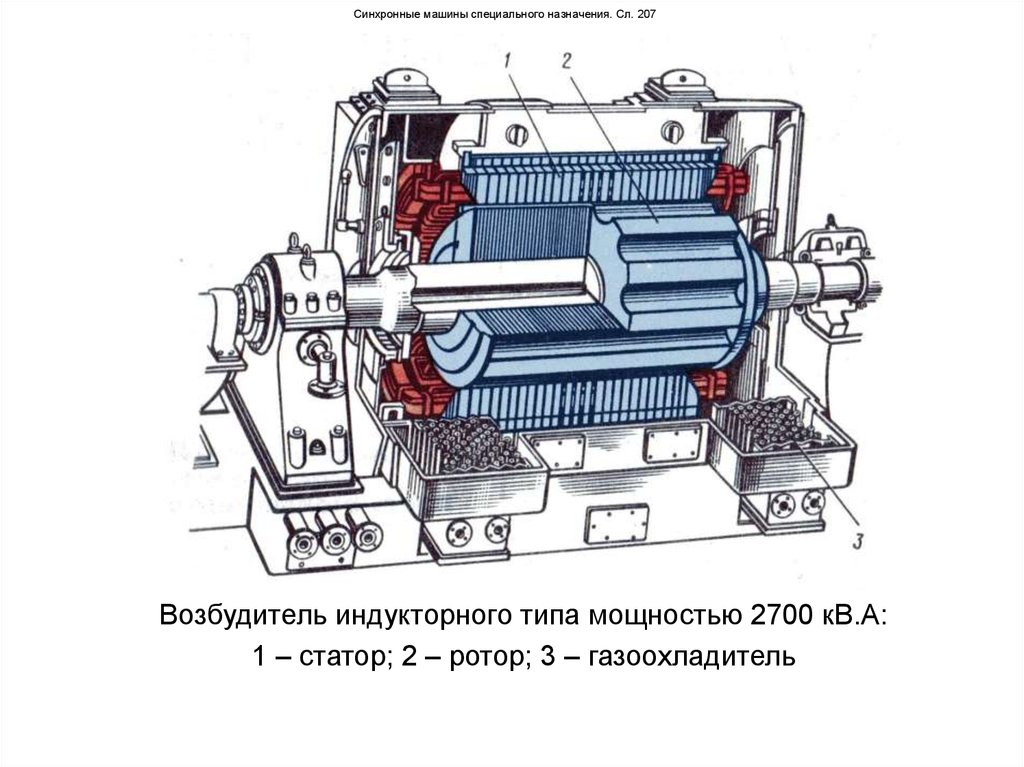 Для динамических приложений очень важно иметь синхронный двигатель.Наконец, если вам требуется точное позиционирование, вам следует выбрать шаговый двигатель.
Для динамических приложений очень важно иметь синхронный двигатель.Наконец, если вам требуется точное позиционирование, вам следует выбрать шаговый двигатель.
В зависимости от требуемого движения вам также потребуется определить технические характеристики и размер двигателя:
💠 Для определения технических характеристик потребуется определить мощность, крутящий момент и скорость двигателя.
💠 Чтобы определить размер, вы должны знать, сколько места займет двигатель и как он будет установлен (то есть как он будет закреплен в системе).
При выборе размеров и прочности двигателя вы также должны учитывать производственную среду, в которой двигатель будет работать:
Существует формат, адаптированный для любого типа среды (взрывоопасная, влажная, коррозионная, высокая температура и т. Д.). Для суровых условий окружающей среды существуют двигатели с усиленным, водонепроницаемым, ударопрочным или грязеотталкивающим корпусом.
Наконец, в последние годы энергоэффективность стала важным фактором, который необходимо учитывать при выборе двигателя. Электродвигатель, который потребляет меньше энергии, будет иметь низкое энергетическое воздействие, что снизит его стоимость энергии.
Электродвигатель, который потребляет меньше энергии, будет иметь низкое энергетическое воздействие, что снизит его стоимость энергии.
Использование электродвигателя
Электродвигатели используются в самых разных областях применения. Некоторые из них перечислены ниже:
💠 Дрели
💠 Жесткие Диски
💠 Водяные Насосы
💠 Стиральные Машины
💠 Промышленное Оборудование
Вы можете ожидать, что эффективность работающего двигателя составит около 70-85%, так как оставшаяся энергия тратится на производство тепла и издаваемые звуки.
Что следует учитывать при покупке двигателя:
При выборе двигателя необходимо обратить внимание на несколько характеристик, но наиболее важными являются напряжение, ток, крутящий момент и скорость (об / мин).
✔️ Ток
это то, что питает двигатель, и слишком большой ток приведет к его повреждению. Для двигателей постоянного тока важны рабочий ток и ток останова. Рабочий ток — это средняя величина тока, которую двигатель может потреблять при типичном крутящем моменте. Ток останова обеспечивает достаточный крутящий момент для двигателя, чтобы работать со скоростью останова, или 0 об / мин. Это максимальный ток, который двигатель может потреблять, а также максимальная мощность, умноженная на номинальное напряжение. Радиаторы важны, если двигатель постоянно работает или работает с напряжением выше номинального, чтобы катушки не плавились.
Ток останова обеспечивает достаточный крутящий момент для двигателя, чтобы работать со скоростью останова, или 0 об / мин. Это максимальный ток, который двигатель может потреблять, а также максимальная мощность, умноженная на номинальное напряжение. Радиаторы важны, если двигатель постоянно работает или работает с напряжением выше номинального, чтобы катушки не плавились.
✔️ Напряжение
Напряжение используется для поддержания тока сети, протекающего в одном направлении, и для преодоления обратного тока. Чем выше напряжение, тем выше крутящий момент. Номинальное напряжение двигателя постоянного тока указывает наиболее эффективное напряжение во время работы. Обязательно подавайте рекомендуемое напряжение. Если вы подадите слишком мало вольт, двигатель не будет работать, в то время как слишком много вольт может привести к короткому замыканию обмоток, что приведет к потере мощности или полному разрушению.
✔️ Значения работы и остановки/ крутящий момент
Значения работы и остановки также необходимо учитывать с учетом крутящего момента.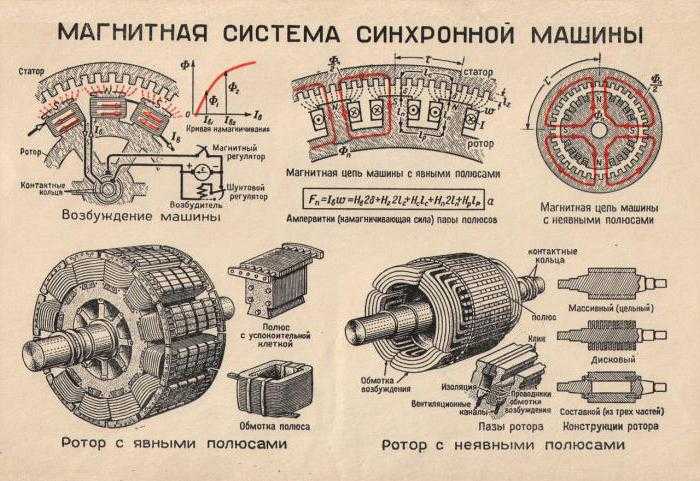 Рабочий крутящий момент — это величина крутящего момента, на которую был рассчитан двигатель, а крутящий момент остановки — это величина крутящего момента, создаваемого при подаче мощности от скорости остановки. Вы всегда должны обращать внимание на необходимый рабочий крутящий момент, но в некоторых приложениях вам потребуется знать, как далеко вы можете продвинуть двигатель. Например, для колесного робота хороший крутящий момент равен хорошему ускорению, но вы должны убедиться, что крутящий момент остановки достаточно силен, чтобы поднять вес робота. В данном случае крутящий момент важнее скорости.
Рабочий крутящий момент — это величина крутящего момента, на которую был рассчитан двигатель, а крутящий момент остановки — это величина крутящего момента, создаваемого при подаче мощности от скорости остановки. Вы всегда должны обращать внимание на необходимый рабочий крутящий момент, но в некоторых приложениях вам потребуется знать, как далеко вы можете продвинуть двигатель. Например, для колесного робота хороший крутящий момент равен хорошему ускорению, но вы должны убедиться, что крутящий момент остановки достаточно силен, чтобы поднять вес робота. В данном случае крутящий момент важнее скорости.
✔️ Скорость (об/мин)
Скорость (об / мин) может быть сложной для двигателей. Общее правило заключается в том, что двигатели наиболее эффективно работают на самых высоких скоростях, но это не всегда возможно, если требуется передача. Добавление шестерен снизит эффективность двигателя, поэтому примите во внимание снижение скорости и крутящего момента.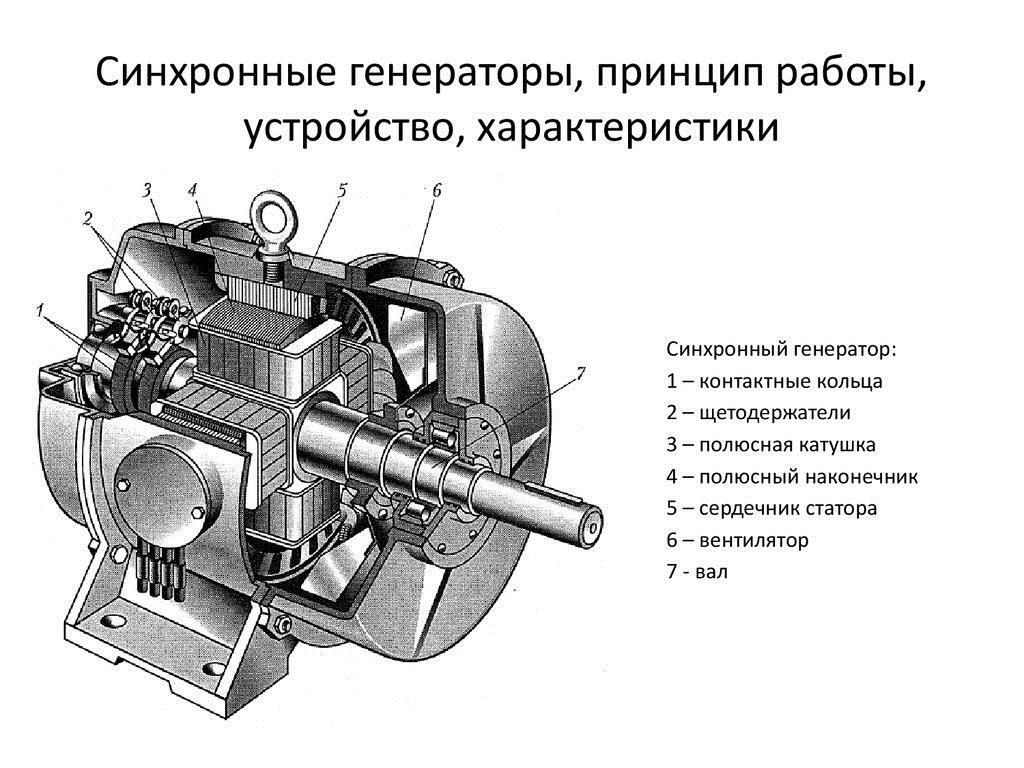
Это основные принципы, которые следует учитывать при выборе двигателя. Подумайте о назначении приложения и о том, какой ток он использует, чтобы выбрать подходящий тип двигателя. Технические характеристики приложения, такие как напряжение, ток, крутящий момент и скорость, будут определять, какой двигатель является наиболее подходящим, поэтому обязательно обратите внимание на его требования.
💠 Какие основные качества следует учитывать в двигателе электроинструмента?
Что важно учитывать при работе с двигателями электроинструментов, так это: щетки, крутящий момент, скорость и род тока.
FAQ❓
🔘 Какие основные качества следует учитывать в двигателе электроинструмента?
Что важно учитывать при работе с двигателями электроинструментов, так это: щетки, крутящий момент, скорость и род тока.
🔘 В чем разница между двигателями переменного и постоянного тока?
Двигатель постоянного или постоянного тока работает от батареи или накопленной
энергии, а двигатель переменного тока подключается к электрической сети.
🔘 Какие преимущества предлагают двухскоростные двигатели?
Они практически более эффективны и производительны, более универсальны и многофункциональны.
🔘 Какой момент затяжки?
В основном это означает силу, прилагаемую к затяжке болта или гайки.
Заключение🧾
Здесь изложены основные принципы, которые следует учитывать при выборе двигателя. Подумайте о назначении приложения и о том, какой ток он использует, чтобы выбрать правильный тип двигателя.
Электромеханика: Электродвигатели Parker Hannifin | VSP-Co.org
Электродвигатели Parker Hannifin
Приводы переменного тока
Приводы постоянного тока
Сервоприводы
Электродвигатели Parker Hannifin представлены двигателями постоянного тока, коллекторныыми двигателями с постоянными магнитами, и двигателями переменного тока, синхронными и асинхронными с короткозамкнутым ротором.
Синхронные двигатели
Серия GVM
Двигатели GVM являются синхронными серводвигателями переменного тока на постоянных магнитах. Достаточно большая величина крутящего момента, быстродействие и эффективность двигателей Parker Hannifin серии GVM обеспечивают требуемые условия для достижения впечатляющих рабочих характеристик во множестве платформ транспортных средств. Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Достаточно большая величина крутящего момента, быстродействие и эффективность двигателей Parker Hannifin серии GVM обеспечивают требуемые условия для достижения впечатляющих рабочих характеристик во множестве платформ транспортных средств. Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Одним из знаковых применений двигателей серии GVM является использование в мотоциклах-прототипах фирмы Victory в гонке 2015 года на острове Мэн. Гонка на острове Мэн — самая длинная гонка для электромотоциклов в мире.
Двигатель Parker Hannifin серии GVM выдерживает очень высокие средние скорости порядка 200 км/ч
и обеспечивает длительную беспрерывную работу
в экстремальных температурных условиях.
Питание: 24 — 800 В DC.
Тип: синхронный, с редкоземельными магнитами.
Количество полюсов: 12.
Крутящий момент: до 376 Н·м.
Номинальная мощность: до 170 кВт.
Частота вращения: до 9800 Об/мин.
Обратная связь: резольвер, SinCos энкодер, бессенсорный.
Типоразмер: 142, 210.
Исполнение: IP67, IP6K9K (опц.).
Особенности: Отличное решения для мобильных приложений (электрокары, электромотоциклы и т.д.).
Серия NV
Серия NV — синхронные двигатели с постоянными магнитами разработанные для высокоскоростных приложений. Высокая точность, низкий уровень вибрации и долгий срок службы обеспечивают работу при максимальной скорости вращения до 17000 об/мин. Уровень защиты корпуса: IP64, IP65, IP67 (по запросу).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 11,5 Нм.
Номинальная мощность: 0,7 — 11 кВт.
Частота вращения: 7000 — 17000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 60, 80, 110, 130.
Исполнение: IP64, IP65 (опц.).
Особенности: Подходят для высокоскоростных приложений.
Серия SMB/H/E, MB/H/E, NX
Серии двигателей SMB/H/E, MB/H/E, NX представляют линейку синхронных двигателей с постоянными или редкоземельными магнитами.
Благодаря инновационной технологии «Salient Pole» (использование неодимового магнита — мощного постоянного магнита, состоящего из сплава редкоземельного элемента неодима, бора и железа) двигатели серии SMB/H/E, MB/H/E достигают высоких ускорений и выдерживают большие перегрузки без риска размагничивания или отрыва магнита. Совместимы со следующими сериями приводов: SLVD-N, TPD-M, HiDrive, ViX, TWIN-N/SPD-N.
Двигатели серии NX — компактные, с низкой пульсацией момента и плавным ходом, являются эффективной альтернативой традиционным индукционным двигателям. Бессенсорная версия двигателя была разработана в качестве альтернативного решения для минимизации затрат в сочетании с приводом Parker Hannifin AC650S.
Питание: 230, 400 — 480 В AC.
Тип: синхронный, с постоянными / редкоземельными магнитами.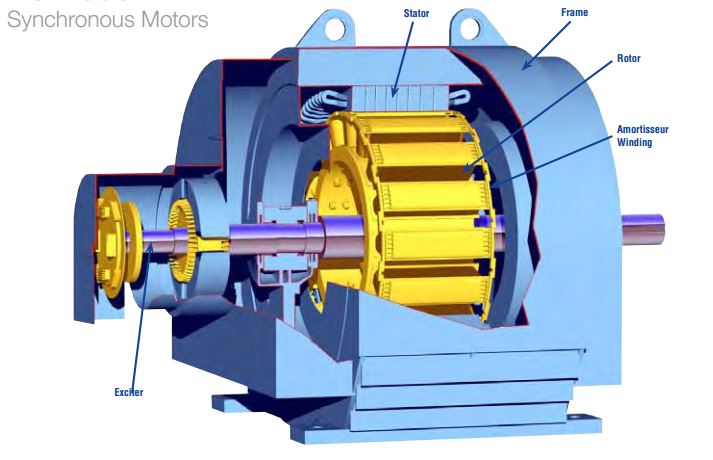
Количество полюсов: 4 — 10.
Крутящий момент: 0,35 — 269 Нм.
Номинальная мощность: 0,2 — 67 кВт.
Частота вращения: 0 — 10000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), инк. энкодер.
Типоразмер: 40, 42, 56, 60, 70, 82, 92, 100, 105, 115, 120, 142, 145, 155,170, 205, 265.
Исполнение: IP44, IP64, IP65, IP67.
Особенности: Компактные с низкой пульсацией момента и плавным ходом.
Серия AC M2n
Серия AC M2n — компактные синхронные электродвигатели для приложений, требующих быстрого ускорения. Благодаря использованию высокоэффективных магнитных материалов и тщательно оптимизированной конструкции ротора, двигатели обладают низким моментом инерции, а стабильность магнитов позволяет использовать максимальные токи четырехкратно превышающие номинальные. В качестве датчика обратной связи двигатели используют встроенный в конструкцию револьвер.
Питание: 230, 400 — 480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 6.
Крутящий момент: 0,13 — 34 Нм.
Номинальная мощность: 0,04 — 8,37 кВт.
Частота вращения: 4000 — 6000 Об/мин.
Обратная связь: резольвер.
Типоразмер: 40, 55, 88, 105, 145.
Исполнение: IP45, IP65.
Особенности: Компактные с низкой инерцией.
Серия NK
Серия NK — встраиваемые компактные бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений, обеспечивают работу при максимальной скорости вращения до 15000 об/мин.
Питание: 230, 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 90 Нм.
Номинальная мощность: 0,2 — 34 кВт.
Частота вращения: 1000 — 15000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 42, 56, 62, 80, 110, 143.
Исполнение: IP00.
Особенности: Встраиваемые, компактные, для высокоскоростных приложений.
Серия TM/TK
Серии синхронных двигателей с постоянными магнитами TM/TK обладают высокой прочностью и обеспечивают работу в жестких условиях. Высокий крутящий момент на малых оборотах предоставляет пользователю решение для следующих приложений: прессы, миксеры, намоточные машины, экструдеры. Серия TM имеет бескорпусное исполнение.
Питание: 400 — 480 В AC.
Тип: синхронный, с постоянными магнитами / +бескорпусной.
Количество полюсов: 24 — 120.
Крутящий момент: 90 — 22100 Нм.
Номинальная мощность: 6,9 — 394 кВт.
Частота вращения: 29 — 2500 Об/мин.
Обратная связь: Endat энкодер, бессенсорный, резольвер (опц.).
Типоразмер, мм: 398, 600, 830 / 230, 385, 565, 795.
Исполнение: IP54 / IP00.
Особенности: Высокий крутящий момент на малых оборотах, для прессов, миксеров, намоточных машин, экструдеров.
Серия HKW/SKW
Серия HKW/SKW — бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений мощностью до 230 кВт.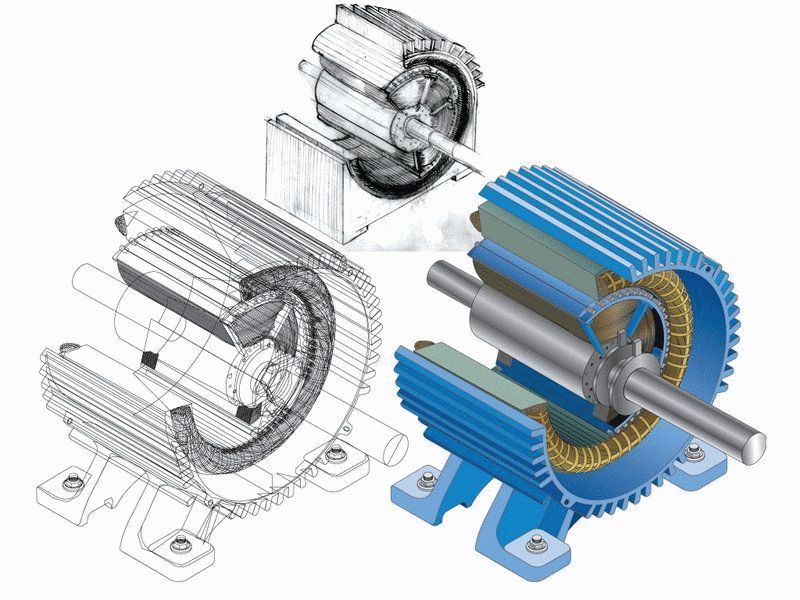 Электродвигатели используются в приложениях, где высокий крутящий момент на низкой скорости и высокая скорость при постоянной мощности являются критичными характеристиками.
Электродвигатели используются в приложениях, где высокий крутящий момент на низкой скорости и высокая скорость при постоянной мощности являются критичными характеристиками.
Питание: 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 4 — 16.
Крутящий момент: 3,5 — 1250 Нм.
Номинальная мощность: 2,0 — 230 кВт.
Частота вращения: 260 — 23200 Об/мин.
Обратная связь: бессенсорный, резольвер (опц.).
Типоразмер: 73, 82, 85, 91, 96, 108, 155.5, 195, 242, 310.
Исполнение: IP00.
Особенности: Встраиваемые, решения для высокоскоростных приложений.
Серия MGV
Синхронный двигатель MGV на постоянных магнитах обеспечивает работу при максимальной скорости вращения до 45000 об/мин, используется во многих компонентах автомобильных или авиационных испытательных установок.
Питание: 400 — 480 В AC.
Тип: синхронный, на постоянных магнитах.
Количество полюсов: 4 — 16.
Крутящий момент: 6,8 — 1500 Нм.
Номинальная мощность: 15 — 500 кВт.
Частота вращения: 5000 — 45000 Об/мин.
Обратная связь: резольвер.
Типоразмер: 430, 635, 840, 860, 950, 966, A50, B40, B50.
Исполнение: IP40.
Особенности: Для высокоскоростных приложений тестовых стендов.
Серия EX/EY
Синхронные электродвигатели EX/EY с постоянными магнитами обеспечивают работу в Зоне 2 при окружающей температуре от 40 ºC до 60 º. Оборудование соответствует стандартам ATEX, IECEx (Зона 1, 2).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 1,75 — 41 Нм.
Номинальная мощность: до 6,3 кВт.
Частота вращения: 0 — 7600 Об/мин.
Обратная связь: резольвер, энкодер (опц.) (EnDat, Hiperface), бессенсорный.
Типоразмер:, 70, 92, 120, 121, 155.
Исполнение: IP64, IP65.
Особенности: ATEX, IECEx (зона 1, 2).
Коллекторные двигатели. Серия RS, RX / AXEM
Сервомоторы серии RS — малоинерционные двигатели с магнитом из редкоземельных металлов.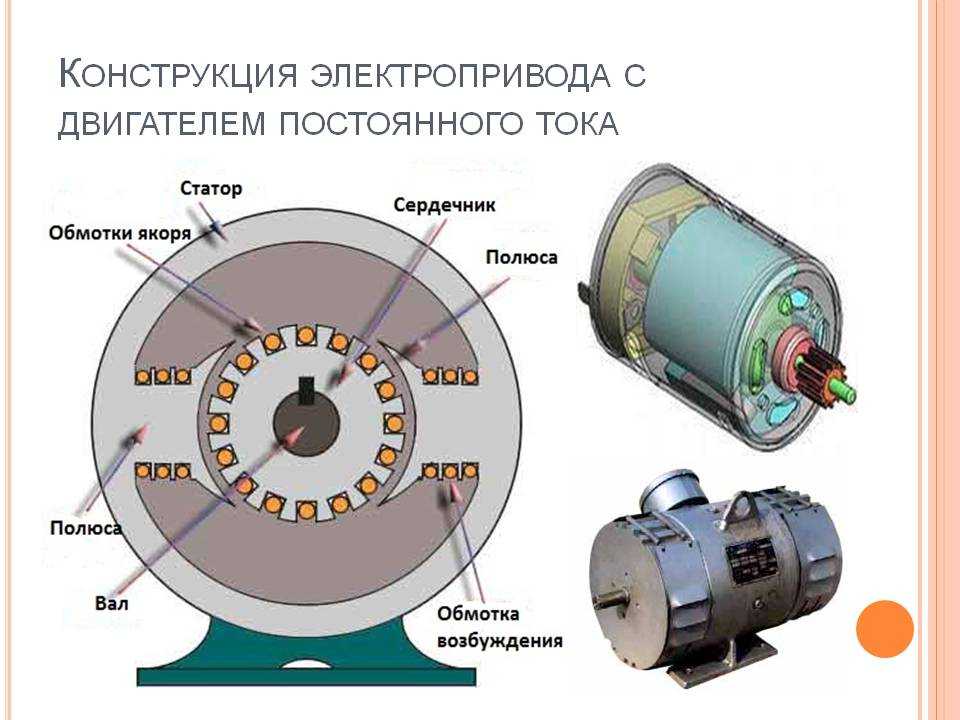
Серия RX представляет собой высокоинерционные двигатели с ферритовым магнитом, которые демонстрируют высокие характеристики при работе на холостом ходу. Двигатель RX является экономически эффективным решением для различных серво-приложений. Серия RX также обеспечивает работу маломощных систем в Чистых помещениях.
Сервомоторы RS/RX постоянного тока в сочетании с приводами серии RTS полностью подходят для применений, где требуется компактное решение или высокий динамический уровень.
Двигатели серии AXEM являются одними из самых распространенных серводвигателей во всем мире — парк установленного оборудования насчитывает более 2 000 000 единиц. Сервомотор обеспечивает высокую динамику и управление на низкой скорости, а также работу без шума и вибраций. Надежное и эффективное решение с низкими эксплуатационными расходами.
Питание: 14 — 178 В DC.
Тип: коллекторный с редкоземельными магнитами / с плоским ротором.
Количество полюсов: 4 / нет.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальный ток: 1,5 — 28 А.
Частота вращения: 2000 — 4800 Об/мин.
Обратная связь: тахогенератор, энкодер, резольвер.
Типоразмер: 39, 52, 58, 68, 83, 84, 97, 100, 110, 120, 140, 160, 211, 278.
Исполнение: IP20, IP40, IP54.
Особенности: Отличное управление на низкой скорости вращения, компактность, для медицинских приложений.
Видеоролик ВСП: Электромеханика Parker Hannifin.
Приводы переменного тока
Приводы постоянного тока
Сервоприводы
Новостные блоки по электродвигателям Parker Hannifin
Простой и эффективный серводвигатель Parker Hannifin серии SMB / SMH / SME — применение в фармацевтическом производстве …>>
Электромеханика: серводвигатель Parker Hannifin серии AXEM …>>
Брошюра: Электромеханика Parker Hannifin (PDF, RU) …>>
Информационный бюллетень: Электродвигатели Parker Hannifin (PDF, RU) . .>>
.>>
Информационный бюллетень: Электромеханика Parker Hannifin (PDF, RU) …>>
Информационный бюллетень: Серводвигатели серии SMB / SMH / SME Parker Hannifin (PDF, RU) …>>
Информационный бюллетень: Серводвигатели серии MB / MH / ME Parker Hannifin (PDF, RU) …>>
Информационный бюллетень: Бескорпусные двигатели Parker Hannifin серии HKW (PDF, RU) …>>
Информационный бюллетень: Высокоскоростные двигатели Parker Hannifin серии MGV (PDF, RU) …>>
Информационный бюллетень: Серводвигатели Parker Hannifin серии AXEM (PDF, RU) ..>>
Каталог: Решения для управления движением (26 MB, PDF, EN) …>>
Семейство синхронных двигателей переменного тока с постоянными магнитами
NIDEC-MOTOR.COM
ГЛАВНАЯ
|
ГДЕ КУПИТЬ
|
СВЯЖИТЕСЬ С НАМИ
|
НОВОСТИ И СОБЫТИЯ
|
О НАС
|
ПОДДЕРЖИВАТЬ
|
ПОСМОТРЕТЬ КОРЗИНУ
Нажмите, чтобы увеличить
Семейство синхронных двигателей
Синхронные двигатели HURST ® с постоянными магнитами являются реверсивными
конденсаторные двигатели с постоянными конденсаторами, идентичные по конструкции
ХЕРСТ 9Шаговые двигатели 0012 ® .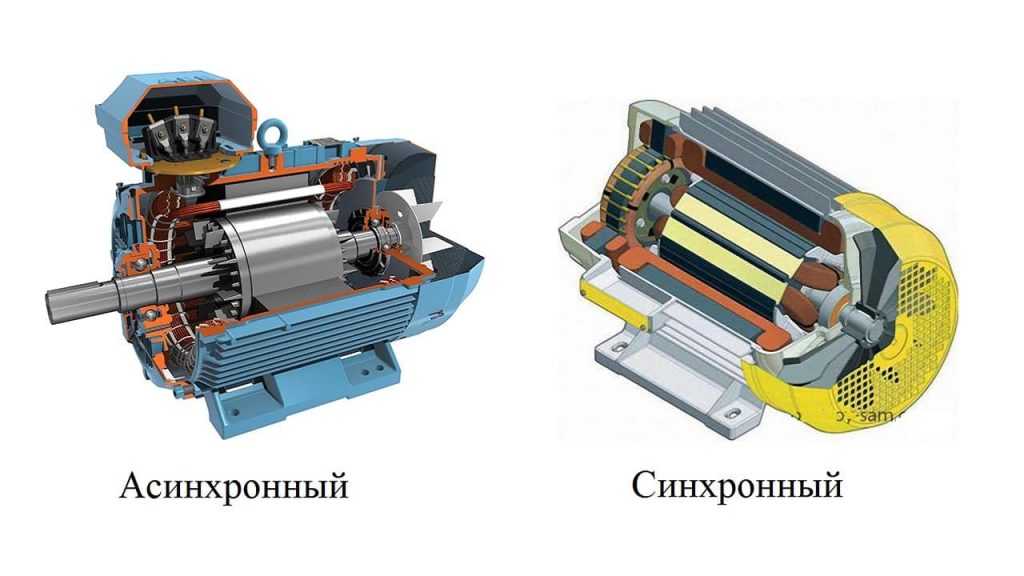 Двигатели для штабелирования с частотой 60 Гц работают при
Двигатели для штабелирования с частотой 60 Гц работают при
синхронные скорости 300 и 600 об/мин. Высококачественная передача
доступны для двигателей с возможностью штабелирования. Керамический магнит ротора
материал обеспечивает относительно высокий поток, что приводит к хорошему крутящему моменту
соотношение размеров при умеренной стоимости. Кроме того, постоянный магнит
конструкция обеспечивает динамическое торможение и низкую скорость вращения ротора
для тихой работы и быстрого ускорения. Недостатки
двигатели с постоянными магнитами имеют ограниченную способность ускорять инерционные
нагрузок и высокой чувствительностью к параметрам напряжения и
фазирующий конденсатор. Первая из этих проблем может быть минимизирована путем
зубчатые передачи или, в некоторых случаях, гибкие муфты. Чувствительность к
напряжение и фазирующий конденсатор напрямую влияют на направленность
надежность как запуска, так и работы под нагрузкой. В ХЕРСТ ® двигатель
Направленная надежность конструкции является основным соображением и
гарантируется, когда двигатели работают с рекомендуемым конденсатором
в диапазоне напряжения 10% от номинального.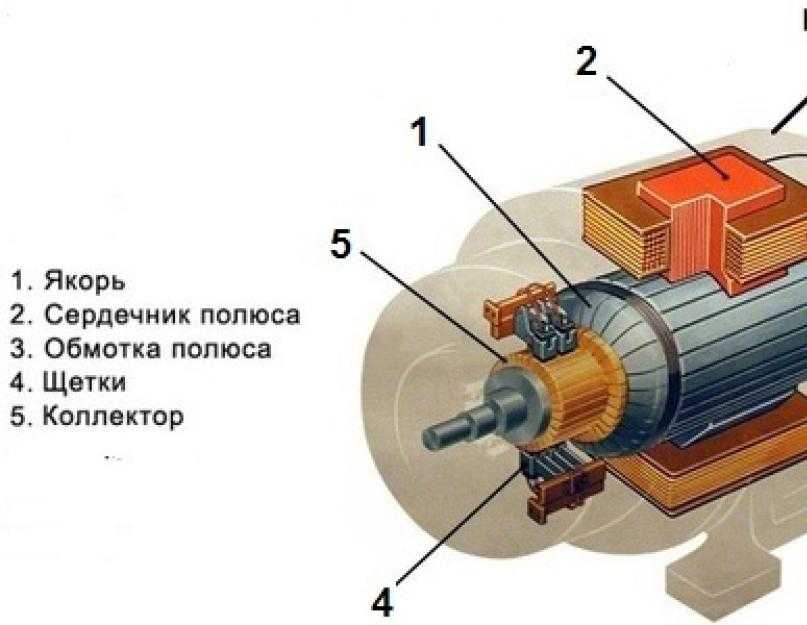
Нажмите, чтобы увеличить
Серия
, 35 мм (LYD35), прямой привод
Синхронный двигатель
- 24 или 115 В переменного тока, 50/60 Гц
- Размер 35 мм
- Скорость 300 об/мин
Нажмите, чтобы увеличить
Серия
35 мм (LYG35) Синхронный двигатель с редуктором
- 24 или 115 В переменного тока, 50/60 Гц
- Размер 35 мм
- Крутящий момент до 150 унций-дюйм
- Диапазон скоростей от 0,3 до 300 об/мин
- До 900 Редуктор для мотор-редукторов
Нажмите, чтобы увеличить
Серия
, 42 мм (LYD42), прямой привод
Синхронный
Двигатель
- 24 или 115 В переменного тока, 50/60 Гц
- Размер 42 мм
- Скорость 300 об/мин
Нажмите, чтобы увеличить
Серия 42 мм (LYG42) Синхронный двигатель с редуктором
- 24 или 115 В переменного тока, 50/60 Гц
- Размер 42 мм
- Крутящий момент до 150 унций-дюйм
- Диапазон скоростей от 0,3 до 300 об/мин
- До 900 Редуктор для мотор-редукторов
Нажмите, чтобы увеличить
Серия
49 мм (A, AB) Синхронный двигатель с прямым приводом
- 24, 115 или 230 В переменного тока 50/60 Гц
- Скорость 300 или 600 об/мин
- Размер 49 мм
Нажмите, чтобы увеличить
Серия 49 мм (A, AB) Синхронный двигатель с редуктором
- 24, 115 или 230 В переменного тока, 50/60 Гц
- Диапазон скорости от 1 до 600 об/мин
- Крутящий момент до 150 унций-дюйм
- Размер 49 мм
- До 900 Редуктор для мотор-редукторов
_
Нажмите, чтобы увеличить
9Серия 0002 55 мм (LYD55) с прямым приводом
Синхронный двигатель
- 24, 115 или 230 В переменного тока, 50/60 Гц
- Размер 55 мм
- Скорость 300 об/мин
Нажмите, чтобы увеличить
Серия
55 мм (LYG55) Синхронный редуктор
Двигатель
- 24, 115 или 230 В переменного тока, 50/60 Гц
- Размер 55 мм
- Крутящий момент до 200 унций-дюйм
- Диапазон скорости от 0,5 до 300 об/мин
- До 600 Редуктор для мотор-редукторов
Нажмите, чтобы увеличить
Серия
59 мм (PA, PB) Синхронный двигатель с прямым приводом
- 24, 115 или 230 В переменного тока 50/60 Гц
- Размер 59 мм
- Скорость 300 или 600 об/мин
Нажмите, чтобы увеличить
Серия
Синхронный мотор-редуктор, 59 мм (PA, PB)
- 24, 115 или 230 В переменного тока, 50/60 Гц
- Размер 59 мм
- Крутящий момент до 200 унций-дюйм
- Диапазон скорости от 1 до 600 об/мин
- До 600 Редуктор для мотор-редукторов
Нажмите, чтобы увеличить
Серия
Синхронный двигатель с прямым приводом, 60 мм (T)
- 24, 115 или 230 В переменного тока, 50/60 Гц
- Размер 24
- Скорость 300 об/мин
Нажмите, чтобы увеличить
Серия 60 мм (T) Синхронный двигатель с редуктором
- 24, 115 или 230 В переменного тока 50/60 Гц
- Размер 24
- Крутящий момент до 250 унций-дюйм
- Диапазон скорости от 0,25 до 300 об/мин
- До 600 Редуктор для мотор-редукторов
Синхронный двигатель с прямым приводом серии 73 мм (RA)
- 115 В переменного тока, 60 Гц
- Крутящий момент до 20 унций-дюйм
- 300 об/мин синхронная скорость
Нажмите, чтобы увеличить
Серия DA, DB Реверсивный синхронный двигатель с гистерезисом
- 115 В переменного тока, 60 Гц
- Диапазон скорости от 24 об/день до 120 об/мин
- Крутящий момент до 100 унций-дюйм
- До 7200 Редуктор для мотор-редукторов
Нажмите, чтобы увеличить
Серия AR-DA Реверсивный синхронный двигатель с гистерезисом
- 115 В переменного тока, 60 Гц
- Диапазон скорости от 1 до 120 об/мин
- Крутящий момент до 100 унций-дюйм
- Включает встроенную муфту
- Увеличенный срок службы сцепления
Нажмите, чтобы увеличить
Серия
PC-DA Реверсивный синхронный двигатель с гистерезисом
- 115 В переменного тока, 60 Гц
- Диапазон скорости от 1 до 120 об/мин
- Крутящий момент до 100 унций-дюйм
- Включает встроенную муфту
- Увеличенный срок службы сцепления
Синхронный реактивный двигатель с прямым приводом серии KS
- 115 В переменного тока, 60 Гц
- 1800 об/мин
- Монтаж NEMA 2-11
Синхронный реактивно-редукторный двигатель серии KS
- 115 В перем. тока, 60 Гц
- Диапазон скорости от 1 до 300 об/мин
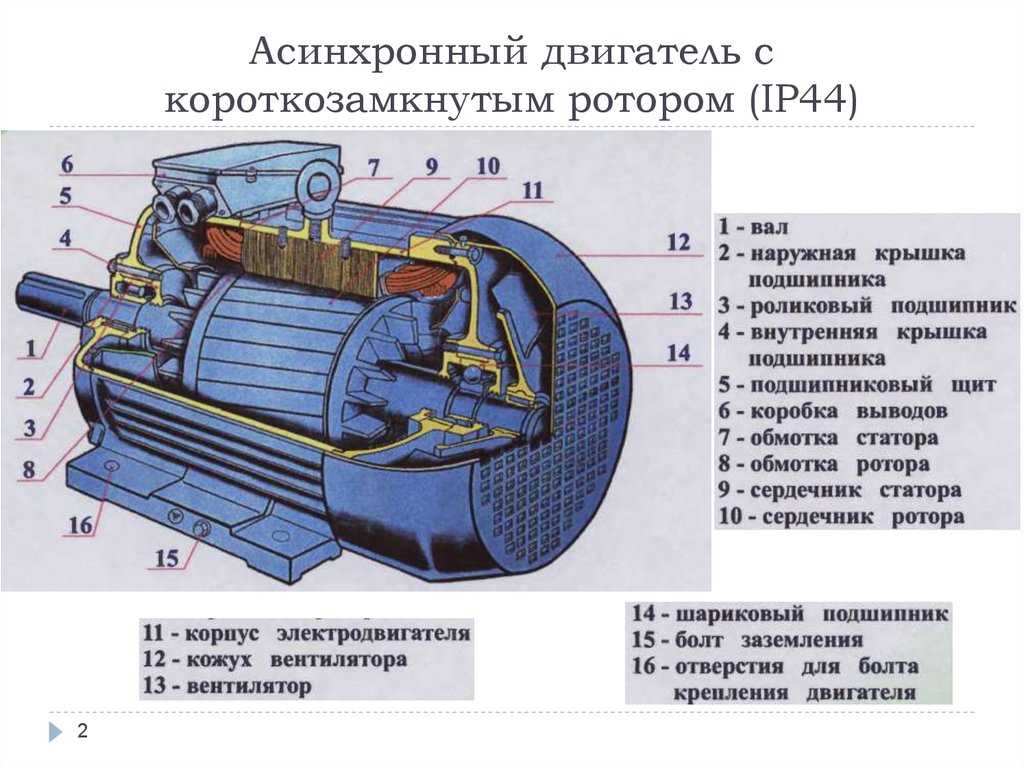 тока, 60 Гц
тока, 60 Гц- Монтаж NEMA 2-11
- Крутящий момент до 250 унций-дюйм
Снятый с производства двигатель Заменен на LYD55
Только для справки
Синхронный двигатель с прямым приводом серии 57 мм (SA)
- 24, 115 или 230 В переменного тока, 50/60 Гц
- Размер 57 мм
- Крутящий момент до 200 унций-дюйм
- Скорость 300 об/мин
Снят с производства Двигатель Заменен на LYG55
Только для справки
Серия 57 мм (SA) Синхронный двигатель с редуктором
- 24, 115 или 230 В перем.
- Размер 57 мм
- Крутящий момент до 200 унций-дюйм
- Диапазон скорости от 1 до 600 об/мин
- До 600 Редуктор для мотор-редукторов
Снятый с производства мотор
только для справки
Серия 57 мм (SC) Синхронный двигатель с прямым приводом
- Опции 24 или 115 60 Гц
- Размер 57 мм
- Крутящий момент до 116 унций-дюйм
- Скорость 300 об/мин
Снятый с производства мотор
только для справки
Серия 57 мм (SC) Синхронный мотор-редуктор
- 24 или 115 60 Гц Опции
- Размер 57 мм
- Крутящий момент до 116 унций-дюйм
- Диапазон скорости от 15 до 300 об/мин
- До 20 Редуктор для мотор-редукторов
Снятый с производства мотор
только для справки
Серия
CA Синхронный двигатель с прямым приводом/редукторным гистерезисом
- 115 В переменного тока, 60 Гц
- Крутящий момент до 100 унций-дюйм
- Диапазон скорости от 1/3 до 1200 об/мин
Снятый с производства мотор
только для справки
Серия EA, синхронный двигатель с прямым приводом/гистерезисным редуктором EF
- 115 В переменного тока, 60 Гц
- Открытая рама, заштрихованная стойка
- Диапазон скорости от 1 до 3600 об/мин
- Крутящий момент до 100 унций-дюйм
Снятый с производства двигатель Заменен на серию T
только для справки
Серия GA Синхронный двигатель с прямым приводом/гистерезисным редуктором
- 115 В перем. тока, 60 Гц
- Размер 70 мм
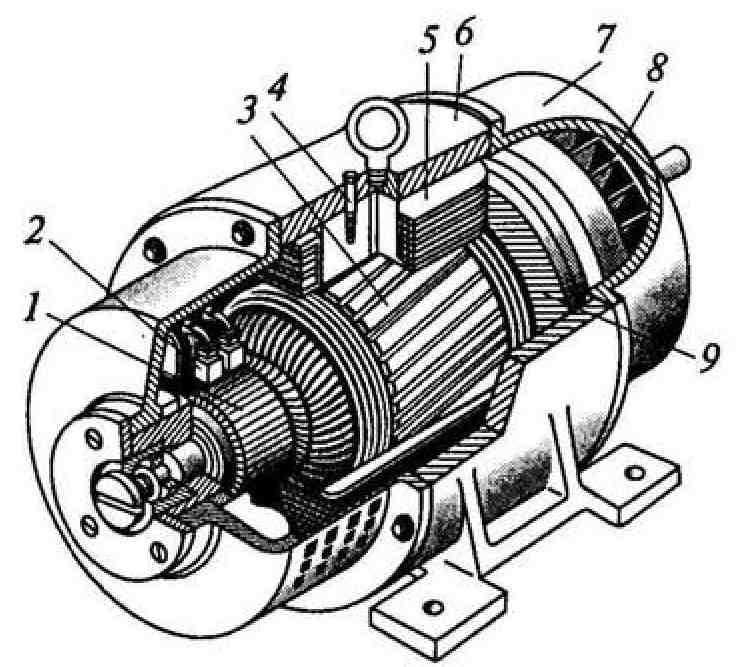 тока, 60 Гц
тока, 60 Гц- Диапазон скорости от 1 до 300 об/мин
- Крутящий момент до 600 унций-дюйм
Снятый с производства мотор
только для справки
Серии MB (Mini-Bee), HB (Honey-Bee) Синхронные двигатели с прямым приводом и гистерезисом
- 115 В переменного тока, 60 Гц
- Реверсивный, перевернутый ротор
- Диапазон скорости от 900 до 1800 об/мин
- Момент затяжки до 16,8 унций/момент вытягивания 17,0 унций
Все о синхронных двигателях: что это такое и как они работают
Большинство людей понимают, что электродвигатели используют электрическую энергию для создания движения, но мало кто знает, сколькими способами это можно сделать.
Может показаться ненужным создавать новые способы выполнения одной и той же задачи, но у инженеров есть веские причины для этого. Некоторые двигатели питаются от постоянного тока, другие — от переменного тока, третьи — от их комбинации, и их конкретный метод передачи энергии уникален для каждого двигателя. В результате существует множество типов двигателей постоянного тока и двигателей переменного тока, каждый из которых имеет свои преимущества в определенных приложениях. В этой статье основное внимание будет уделено двигателям, использующим как переменный, так и постоянный ток, известным как синхронные двигатели, которые используют электромагнетизм для создания точной выходной энергии вращения. Эта статья призвана объяснить структуру, функции и области применения синхронных двигателей, чтобы любой, кто хочет использовать одно из этих устройств, имел для этого соответствующую информацию.
В результате существует множество типов двигателей постоянного тока и двигателей переменного тока, каждый из которых имеет свои преимущества в определенных приложениях. В этой статье основное внимание будет уделено двигателям, использующим как переменный, так и постоянный ток, известным как синхронные двигатели, которые используют электромагнетизм для создания точной выходной энергии вращения. Эта статья призвана объяснить структуру, функции и области применения синхронных двигателей, чтобы любой, кто хочет использовать одно из этих устройств, имел для этого соответствующую информацию.
Что такое синхронные двигатели?
Синхронные двигатели
считаются типом двигателя переменного тока, созданным специально для устранения ограничений асинхронных двигателей, еще одного распространенного класса двигателей переменного тока (дополнительную информацию об этих двигателях можно найти в нашей статье об асинхронных двигателях). Асинхронные двигатели, как следует из их названия, используют электромагнитную индукцию для выработки механической энергии; однако их основным недостатком является то, что они испытывают явления «скольжения».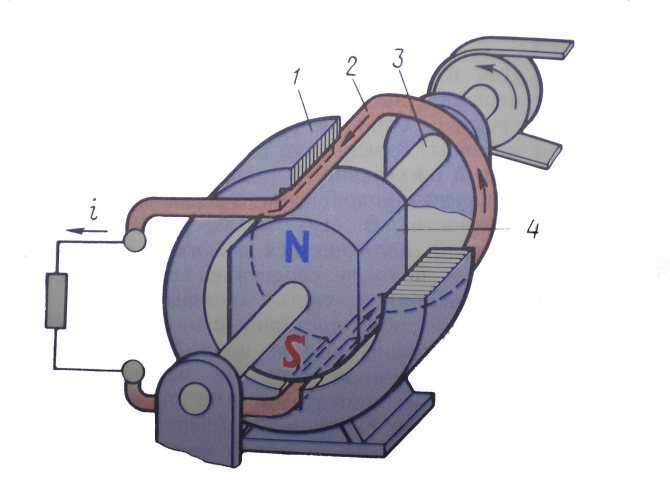 Это «скольжение» представляет собой несоответствие между частотой колебаний переменного тока (вход) и частотой вращения (выход) и является прямым результатом использования эффекта индукции для создания вращения. Хотя это и не относится к большинству приложений, обычные асинхронные двигатели не могут использоваться для точно рассчитанных приложений из-за этого скольжения и известны как «асинхронные» двигатели.
Это «скольжение» представляет собой несоответствие между частотой колебаний переменного тока (вход) и частотой вращения (выход) и является прямым результатом использования эффекта индукции для создания вращения. Хотя это и не относится к большинству приложений, обычные асинхронные двигатели не могут использоваться для точно рассчитанных приложений из-за этого скольжения и известны как «асинхронные» двигатели.
Синхронные двигатели, с другой стороны, были сконструированы таким образом, что выходная частота вращения точно равна входной частоте переменного тока. Их можно использовать для часов, прокатных станов и даже проигрывателей, потому что их скорость точно пропорциональна переменному току, питающему двигатель. Хотя синхронные двигатели не такие мощные и разнообразные, как асинхронные двигатели, они играют жизненно важную роль в любом проекте, требующем точной синхронизации и точных оборотов.
Как работают синхронные двигатели?
Подобно другим асинхронным двигателям, синхронные двигатели состоят из внешнего статора и внутреннего ротора, которые магнитно взаимодействуют друг с другом, создавая выходной крутящий момент. Как и другие двигатели переменного тока, синхронные двигатели могут питаться от однофазного входа (например, настенные розетки) или многофазного входа (промышленные источники/источники более высокого напряжения), в зависимости от размера и области применения. Более подробную информацию об однофазных двигателях можно найти в нашей статье об однофазных двигателях.
Как и другие двигатели переменного тока, синхронные двигатели могут питаться от однофазного входа (например, настенные розетки) или многофазного входа (промышленные источники/источники более высокого напряжения), в зависимости от размера и области применения. Более подробную информацию об однофазных двигателях можно найти в нашей статье об однофазных двигателях.
Статор синхронного двигателя такой же, как и у других асинхронных двигателей, где катушки из меди/алюминия проходят через ламинированные листы металла. Эти катушки несут переменный ток (ток) для создания вращающегося магнитного поля (RMF). Больше всего они отличаются своими роторами, которые содержат постоянное магнитное поле, создаваемое либо реальными магнитами, либо источником постоянного тока через катушки ротора. Это постоянное поле имеет свой собственный набор полюсов север-юг, которые в конечном итоге совпадут с полюсами RMF (в парах север-юг), что приведет к точному выходному вращению, пропорциональному частоте статора. Эти полюса могут выступать из поверхности ротора или содержаться в пазах на роторе, и они известны как роторы с явно выраженными полюсами и роторы с неявнополюсными полюсами соответственно. Однако для запуска должно быть некоторое возбуждение, поскольку разница скоростей между неподвижным ротором и быстрым RMF не позволит их полюсам заблокироваться при запуске. Это достигается разными способами, и в результате синхронные двигатели были разделены на синхронные двигатели без возбуждения и синхронные двигатели с возбуждением током.
Эти полюса могут выступать из поверхности ротора или содержаться в пазах на роторе, и они известны как роторы с явно выраженными полюсами и роторы с неявнополюсными полюсами соответственно. Однако для запуска должно быть некоторое возбуждение, поскольку разница скоростей между неподвижным ротором и быстрым RMF не позволит их полюсам заблокироваться при запуске. Это достигается разными способами, и в результате синхронные двигатели были разделены на синхронные двигатели без возбуждения и синхронные двигатели с возбуждением током.
Типы синхронных двигателей
Как описано ранее, синхронные двигатели можно различать по тому, как их роторы возбуждаются до синхронных скоростей. Существуют синхронные двигатели без возбуждения и синхронные двигатели с возбуждением током, и в этом разделе кратко рассматриваются различные двигатели в каждой из этих категорий.
Синхронные двигатели без возбуждения
Этим синхронным двигателям не требуется напряжение возбуждения для запуска, а в их роторах используются ферромагнитные материалы для взаимодействия со статорами. Они бывают трех основных конструкций: гистерезисные двигатели, синхронные реактивные двигатели и двигатели с постоянными магнитами, каждая из которых будет кратко описана ниже.
Они бывают трех основных конструкций: гистерезисные двигатели, синхронные реактивные двигатели и двигатели с постоянными магнитами, каждая из которых будет кратко описана ниже.
В двигателях с гистерезисом
используется вал ротора, заключенный в какой-либо немагнитный материал (обычно алюминий), на который нанесен слой ферромагнитного материала, образующий «кольцо гистерезиса». СМП статора наводит в этом кольце полюса, но из-за некоторых потерь на гистерезис — или потери энергии из-за отставания между намагничиванием ферромагнетика и изменяющимся магнитным потоком — магнитный поток ротора будет отставать от потока статора. Это отставание вызывает угловое разделение между полем ротора и полем статора, вызывая крутящий момент. Это относительно бесшумные двигатели, которые лучше всего подходят для проигрывателей, магнитофонов и другого звукового оборудования.
Реактивные двигатели используют магнитное притяжение и явление нежелания генерировать движение. По конструкции они похожи как на шаговые, так и на асинхронные двигатели, в которых статор состоит из явно выраженных полюсов катушек, создающих магнитное поле. Ротор изготовлен из ферромагнитного металла в форме модифицированной беличьей клетки. Ротор имеет выемки, барьеры или прорези, которые совпадают с линиями магнитного поля статора, когда полюса ротора и статора совпадают. При несоответствии магнитное поле проходит более длинный путь через ротор и вызывает увеличение сопротивления — магнитного аналога электрического сопротивления. Это создает реактивный крутящий момент на двигателе, поскольку ротор хочет достичь некоторого более низкого сопротивления или вернуться в свое выровненное положение. Это позволяет «втягивать» ротор до синхронных скоростей в некоторых конструкциях, обеспечивая точное выходное вращение. Более подробную информацию можно найти в нашей статье все о реактивных двигателях.
Ротор изготовлен из ферромагнитного металла в форме модифицированной беличьей клетки. Ротор имеет выемки, барьеры или прорези, которые совпадают с линиями магнитного поля статора, когда полюса ротора и статора совпадают. При несоответствии магнитное поле проходит более длинный путь через ротор и вызывает увеличение сопротивления — магнитного аналога электрического сопротивления. Это создает реактивный крутящий момент на двигателе, поскольку ротор хочет достичь некоторого более низкого сопротивления или вернуться в свое выровненное положение. Это позволяет «втягивать» ротор до синхронных скоростей в некоторых конструкциях, обеспечивая точное выходное вращение. Более подробную информацию можно найти в нашей статье все о реактивных двигателях.
Неудивительно, что в роторах двигателей с постоянными магнитами используются постоянные магниты. которые создают постоянный магнитный поток. Это взаимодействует с полюсами RMF статора, которые вызывают вращательное движение. Эти двигатели должны управляться частотно-регулируемым приводом (VFD), поскольку единственный способ изменить их скорость и крутящий момент — это изменить частоту переменного тока статора. Более подробную информацию можно найти в нашей статье о двигателях с постоянными магнитами.
Более подробную информацию можно найти в нашей статье о двигателях с постоянными магнитами.
Синхронные двигатели с возбуждением током
Единственным основным доступным синхронным двигателем с возбуждением током является синхронный двигатель с возбуждением постоянным током, для которого требуется вход постоянного тока, а также вход переменного тока. Источник постоянного тока поступает на ротор, который содержит обмотки, подобные статору, и эти обмотки будут создавать постоянное магнитное поле, индуцируемое источником питания постоянного тока. Это возбудит двигатель и заставит его полюса выровняться с RMF статора, вызывая синхронность. Эти двигатели обычно имеют мощность> 1 л.с. и часто называются синхронными двигателями, поскольку такая конструкция ротора очень распространена.
Применение и критерии выбора
Обсуждаемые различные синхронные двигатели — это просто разные средства для создания синхронной скорости, и их обычно можно использовать в приложениях, где требуется точная скорость. Они не являются самозапускающимися по своей природе, и их не следует выбирать, если требуется самозапуск. Все они имеют повышенный КПД по сравнению с большинством других двигателей переменного и постоянного тока с КПД> 90%. Синхронные двигатели являются предпочтительным выбором для низкоскоростных, высокомощных нагрузок и отлично подходят в качестве источников энергии для дробилок, мельниц и измельчителей. Их скорость остается постоянной независимо от нагрузки, и их скорость может быть изменена только с помощью частотно-регулируемого привода, поскольку входной ток напрямую зависит от скорости на выходе. Если желательны регулируемые скорости, почитайте о двигателях с фазным ротором.
Они не являются самозапускающимися по своей природе, и их не следует выбирать, если требуется самозапуск. Все они имеют повышенный КПД по сравнению с большинством других двигателей переменного и постоянного тока с КПД> 90%. Синхронные двигатели являются предпочтительным выбором для низкоскоростных, высокомощных нагрузок и отлично подходят в качестве источников энергии для дробилок, мельниц и измельчителей. Их скорость остается постоянной независимо от нагрузки, и их скорость может быть изменена только с помощью частотно-регулируемого привода, поскольку входной ток напрямую зависит от скорости на выходе. Если желательны регулируемые скорости, почитайте о двигателях с фазным ротором.
Асинхронные двигатели с такой же мощностью и номинальным напряжением, как правило, дешевле, чем синхронный двигатель с такими же характеристиками. Это означает, что асинхронные двигатели в большинстве случаев являются предпочтительным выбором для привода машин. Синхронные двигатели способны компенсировать потери при распределении электроэнергии и очень полезны для регулирования напряжения. Синхронные двигатели чаще всего используются в больших генераторах или параллельно с асинхронными двигателями, предназначенными для компенсации потерь мощности. Их также намного сложнее обслуживать, чем асинхронные двигатели, и они требуют более частого обслуживания.
Синхронные двигатели чаще всего используются в больших генераторах или параллельно с асинхронными двигателями, предназначенными для компенсации потерь мощности. Их также намного сложнее обслуживать, чем асинхронные двигатели, и они требуют более частого обслуживания.
Может показаться, что синхронные двигатели второстепенны по сравнению с асинхронными двигателями, но без них у нас не было бы часов, проигрывателей, дворников, жестких дисков, сигнальных устройств, записывающих устройств, микроволновых плит или любых других устройств с таймером. Точно так же эффективность этих двигателей помогает скорректировать неэффективность асинхронных двигателей и обеспечивает средства коррекции потерь при распределении. Они бесценны для промышленности как по своим способностям корректировать мощность, так и по своей точности, и, хотя они дороже и сложнее, чем асинхронный двигатель, синхронные двигатели являются еще одной машиной, которую могут использовать конструкторы.
Резюме
В этой статье представлено понимание того, что такое синхронные двигатели и как они работают.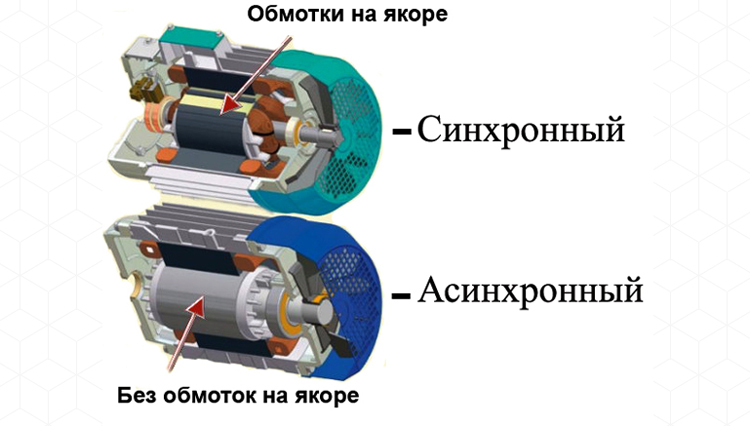 Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http://www.electricalmastar.com/synchronous-motor/
- https://electricalfundablog.com/synchronous-motor/
- http://www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.pdf
Другие товары для двигателей
- Все о бесщеточных двигателях постоянного тока: что это такое и как они работают
- Все о двигателях с постоянными магнитами — что это такое и как они работают
- Все о двигателях постоянного тока с обмоткой серии — что это такое и как они работают
- Все о шунтирующих двигателях постоянного тока — что это такое и как они работают
- Все о шаговых двигателях — что это такое и как они работают
- и серводвигатели — в чем разница?
- Все о контроллерах двигателей переменного тока — что это такое и как они работают
- и асинхронные двигатели — в чем разница?
- и щеточные двигатели — в чем разница?
- Кто изобрел паровой двигатель? Урок промышленной истории
- Все о двигателях с электронным управлением — что это такое и как они работают
- и серводвигатели — в чем разница?
- и двигатели постоянного тока — в чем разница?
- Все о контроллерах серводвигателей — что это такое и как они работают
- Что такое трехфазный двигатель и как он работает?
- ECM Motors и PSC Motors — в чем разница?
- Все о устройствах плавного пуска двигателей: что это такое и как они работают
- Все о контроллерах двигателей постоянного тока — что это такое и как они работают
- Основы тестирования двигателя (и ротора)
- Что такое штамповка двигателя и как она работает?
- Все о двигателях с дробной мощностью
Шаговые двигатели
Синхронные двигатели
Бесщеточные двигатели
Двигатели постоянного тока
Шаговые двигатели
Больше из Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Синхронные двигатели переменного тока
DS2 | Baumüller
Синхронные двигатели Baumüller называются DS. «DS» относится к немецкому языку трехфазного синхронного двигателя («Drehstrom-Synchronmotor»).
Серия DS2 доступна в версиях с воздушным и водяным охлаждением. северный и южный полюса).
Если ток подается на обмотки U, V и W в подставке (также называемой корпусом), этот ток создает магнитное поле вокруг обмоток. Это магнитное поле и постоянное магнитное поле на роторе вызывают непосредственное притяжение между северным и южным полюсами и отталкивание одноименных полюсов. Это, в свою очередь, вызывает вращательное движение двигателя.
Благодаря такой конструкции двигателя частота вращающегося поля корпуса и ротора всегда остается неизменной. Поэтому это называется частотой синхронного вращающегося поля, и поэтому двигатель называется синхронным двигателем. Напротив, частота корпуса и ротора асинхронного двигателя никогда не должны быть одинаковыми. Поэтому это называется частотой асинхронного вращающегося поля, и поэтому двигатель называется асинхронным двигателем.
Анимация синхронного двигателя
Анимация показывает трехфазную систему обмотки. Для большей наглядности на эскизе вместо ротора показан простой постоянный магнит. Как только ток протекает в обмотках, в корпусе двигателя создается вращающееся магнитное поле, как описано выше. Он также проходит через постоянные магниты ротора, вызывая крутящий момент. Ротор совершает вращательное движение и следует за вращением магнитного поля.
Крутящий момент наибольший, когда магнитные полюса ротора образуют прямой угол с магнитным полем корпуса. Положение ротора определяется и передается на привод. Это необходимо для формирования токов с оптимальным углом 90 градусов в обмотки корпуса. Это также позволяет изменять силу крутящего момента.
Резольверы или энкодеры используются для определения положения и одновременно служат фактическим значением для регулятора положения.
Для применений с максимальными требованиями к энергоэффективности
Baumüller предлагает синхронные двигатели с высотой оси от 100 до 200 мм и различными способами охлаждения. Серводвигатель идеально подходит для всех применений с максимальными требованиями к энергоэффективности, например. в:
- Печатные машины
- Упаковочные машины
- Текстильные машины
- Машины для производства пластмасс
- Манипуляторы
- Специальные машины
- Общее машиностроение
Высокопроизводительные синхронные главные приводы
Благодаря инновационной концепции водяного охлаждения с улучшенной теплопередачей компания Baumüller смогла повысить номинальную мощность своих двигателей DS2. В серии DS2 компания Baumüller предлагает синхронные двигатели мощностью до 300 кВт. . Благодаря инновационной концепции водяного охлаждения с улучшенной теплопередачей компания Baumüller смогла повысить номинальную мощность своих двигателей DS2. В результате производители пластиковых и формовочных машин особенно выигрывают от возможности сократить дополнительное пространство для установки. Дополнительным преимуществом водяного охлаждения является снижение шума водяной рубашкой, что делает ненужными меры по шумоподавлению.
Серводвигатели Baumüller DS2 были еще больше оптимизированы для работы с пластиком и резиной, а также для печатных, формовочных и текстильных машин за счет увеличения скорости и повышения производительности
Если качество воды на объекте недостаточно для целей охлаждения, Baumüller предлагает двигатели с дополнительное воздушное охлаждение. В этой версии, отвечающей, в частности, требованиям азиатского рынка, синхронные двигатели Baumüller имеют степень защиты до IP54, как и в конструкции с водяным охлаждением.
Серводвигатели Baumüller DS2 были еще больше оптимизированы для работы с пластиком и резиной, а также для печатных, формовочных и текстильных машин за счет увеличения скорости и повышения производительности. В дополнение к концепции охлаждения Baumüller предлагает номинальные скорости до 3000 об/мин . Что касается использования двигателей DS2 в сервонасосах, то нюрнбергский производитель проложил путь к новым разработкам насосов с внутренним зацеплением с повышенной скоростью. Использование комбинаций двигатель/насос с более высокой скоростью вращения позволяет уменьшить размеры как насоса, так и двигателя. Это позволяет повысить как экономическую эффективность, так и за счет меньшей инерционности системы производительность машины.
Благодаря инновациям в концепции охлаждения и увеличению скорости, поколение трехфазных синхронных двигателей Baumüller DS2 предлагает мощный, динамичный синхронный двигатель мощностью до 300 кВт, который дает пользователю повышение производительности, экономию средств и, следовательно, главное конкурентное преимущество.
Синхронные двигатели трехфазного тока серии DS2
Синхронные двигатели трехфазного тока серии DS2 имеют очень высокую удельную мощность, очень высокий КПД и высокую динамику и поэтому идеально подходят для самых требовательных применения в машиностроении. В настоящее время доступны двигатели типоразмеров 100, 132, 160 и 200. Прочные и компактные двигатели практически не требуют технического обслуживания, что является еще одним плюсом для экономичной эксплуатации.
Ваши преимущества:
- Большой диапазон мощностей
- Номинальная скорость до 3000 об/мин в зависимости от типоразмера
- Высокий максимальный крутящий момент для улучшения ускорения
- Сокращение времени цикла для повышения производительности
- Отсутствие муфт или опор насоса благодаря валу с внутренними зубьями
- Экономия места и затрат благодаря компактной конструкции
- Очень высокая удельная мощность
- Ультрадинамичные, прочные и компактные трехфазные синхронные двигатели DS2
- Низкий уровень шума
- Высокая точность крутящего момента
- Неизнашиваемый и необслуживаемый
- Хорошие характеристики ускорения
- Очень хорошие характеристики концентричности
- Высокая вариативность благодаря модульному принципу
- Энергоэффективность благодаря высокому КПД
- Синхронные двигатели с постоянным возбуждением
- Вентилируемый IP23, IP54
- С водяным охлаждением IP54
- Энкодеры: Резольвер, SinCos-энкодер
- Опционально с тормозом
Более высокие скорости для оптимальной работы
DS2-132 с воздушным охлаждением Благодаря более высоким скоростям двигатели DS2 оптимальны для использования в качестве сервопривода насоса в машинах для литья под давлением, производства резины и формовки, а также в качестве главного привода в полиграфии и текстильной промышленности. машины. Благодаря увеличенной номинальной скорости DS2 обеспечивает максимальный крутящий момент, доступный в широком диапазоне скорости, что улучшает ускорение. Это позволяет сократить время цикла и повысить производительность машины. Увеличение производительности, обеспечиваемое повышенной скоростью, приводит к оптимальным размерам мотор-трансмиссии и, таким образом, к повышению экономической эффективности.
Дополнительный вал с внутренними зубьями является еще одним усовершенствованием серводвигателей серий DSC, DSP, DSD2 и DS2. Этот вариант интерфейса не требует никаких других дорогостоящих элементов передачи, таких как муфты или опоры насоса. Это снижает затраты и оптимизирует пространство для установки. Предлагается для двигателей DS2 типоразмеров 100 и 132 в качестве опции / по запросу.
Версия интерфейса с внутренним зубчатым зацеплением позволяет отказаться от дорогостоящих передаточных элементов, таких как муфты и опоры насоса. Эта опция доступна для серводвигателей серий DS2, DSP, DSD2 и DSC и позволяет сократить расходы при оптимизации монтажного пространства
Пример применения: Комплект приводов для машин для литья под давлением
Короткое время цикла, максимальная точность и энергоэффективные приводы. Для гибридных и полностью электрических машин для литья под давлением мы напрямую задаем важные промышленные тенденции вместе с производителем машин посредством совместно разработанных концепций. Для этого мы используем наш обширный опыт работы в вашем сегменте рынка.
Сокращение времени цикла и снижение затрат на электроэнергию
- Система промежуточного звена постоянного тока, состоящая из отдельных приводов, оптимизированная для приложений с пиковыми нагрузками
- Компактные синхронные двигатели с различными вариантами охлаждения, широким диапазоном регулирования скорости и высокой плотностью мощности и крутящего момента
- Возможное использование параллельных функций (разблокировка инструмента и процедура дозирования)
Для повышения точности и качества продукции
- Высокосинхронное позиционирование благодаря полевой шине EtherCAT с поддержкой реального времени
- Очень короткое время цикла шины обеспечивает оптимальный контроль и толщину материала в процессе впрыска
- Передискретизация при оценке сигнала энкодера для максимальной точности позиционирования асинхронных служебных данных и стандартных протоколов Ethernet
Повышение доступности оборудования
- Возможности удаленного обслуживания и диагностики благодаря полевой шине EtherCAT и туннелированию TCP/IP
- Параметры целевой диагностики и анализ контуров управления с помощью функций быстрого преобразования Фурье и осциллографа в реальном времени, интегрированных в программное обеспечение для параметризации ProDrive
- Мягкое и контролируемое падение крутящего момента после торможения до нулевой скорости предотвращает резкое высвобождение предварительно затянутых винтов, тем самым предотвращая разрушение головок винтов
Технические характеристики DS2
| P N [kW] | n N [min -1 ] | J [kgm²] | M 0 [Nm] | М 0max [Нм] | ||
|---|---|---|---|---|---|---|
| ||||||
| ДС2-100 | 1000 — 3000 | 0,01 — 0,02 | 48 — 165 | 120 — 340 | ||
| ДС2+-100 | 23-66 | 4000 — 4500 | 0,01 — 0,02 | 61 — 165 | 130 — 325 | |
| ДС2-132 | 14 — 105 | 1000 — 3000 | 0,045 — 0,08 | 130 — 375 | 305 — 710 | |
| ДС2+-132 | 56 — 123 | 4000 — 4500 | 0,045 — 0,08 | 180 — 365 | 340 — 680 | |
| ДС2-160 | 30 — 155 | 1000 — 3000 | 0,15 — 0,25 | 320 — 695 | 690 — 1210 | |
| ДС2-200 | 39 — 295 | 500 — 2700 | 0,44 — 0,79 | 570 — 1340 | 1130 — 2190 | |
Возможны изменения. Указанные значения являются максимальными значениями.
Подробную информацию см. в технической документации.
Мы будем рады помочь вам
Свяжитесь с нами.
Страна*
Please selectGermanyUnited StatesUnited KingdomIndiaItalyAfghanistanAland IslandsAlbaniaAlgeriaAmerican SamoaAndorraAngolaAnguillaAntarcticaAntigua and BarbudaArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahamasBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBermudaBhutanBoliviaBonaire, Sint Eustatius and SabaBosnia and HerzegovinaBotswanaBouvet IslandBrazilBritish Indian Ocean TerritoryBruneiBulgariaBurkina FasoBurundiCambodiaCameroonCanadaCape VerdeCayman IslandsCentral African RepublicChadChileChinaChristmas IslandCocos (Keeling) IslandsColombiaComorosCongoCook IslandsCosta RicaCote d’ivoire (Ivory Coast)CroatiaCubaCuracaoCyprusCzech RepublicDemocratic Republic of the CongoDenmarkDjiboutiDominicaDominican RepublicEcuadorEgyptEl SalvadorEquatorial GuineaEritreaEstoniaEthiopiaFalkland Islands (Malvinas )Фарерские островаФиджиФинляндияФранцияФранцузская ГвианаФранцузская ПолинезияФранцузские Южные ТерриторииГабонГамбияГрузияГерманияГанаГибралтарГрецияГренландияГренадаГваделупаГуамГватемалаГернсиГуи neaGuinea-BissauGuyanaHaitiHeard Island and McDonald IslandsHondurasHong KongHungaryIcelandIndiaIndonesiaIranIraqIrelandIsle of ManIsraelItalyJamaicaJapanJerseyJordanKazakhstanKenyaKiribatiKosovoKuwaitKyrgyzstanLaosLatviaLebanonLesothoLiberiaLibyaLiechtensteinLithuaniaLuxembourgMacaoMacedoniaMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMartiniqueMauritaniaMauritiusMayotteMexicoMicronesiaMoldavaMonacoMongoliaMontenegroMontserratMoroccoMozambiqueMyanmar (Burma)NamibiaNauruNepalNetherlandsNew CaledoniaNew ZealandNicaraguaNigerNigeriaNiueNorfolk IslandNorth KoreaNorthern Mariana IslandsNorwayOmanPakistanPalauPalestinePanamaPapua New GuineaParaguayPeruPhillipinesPitcairnPolandPortugalPuerto RicoQatarReunionRomaniaRussiaRwandaSaint BarthelemySaint HelenaSaint Kitts and NevisSaint LuciaSaint MartinSaint Pierre and MiquelonSaint Vincent and the GrenadinesSamoaSan MarinoSao Tome and PrincipeSaudi ArabiaSenegalSerbiaSeychellesSierra LeoneSingaporeSint MaartenSlovakiaSloveniaSolomon I slandsSomaliaSouth AfricaSouth Georgia and the South Sandwich IslandsKorea, Republic ofSouth SudanSpainSri LankaSudanSurinameSvalbard and Jan MayenSwazilandSwedenSwitzerlandSyriaTaiwanTajikistanTanzaniaThailandTimor-Leste (East Timor)TogoTokelauTongaTrinidad and TobagoTunisiaTurkeyTurkmenistanTurks and Caicos IslandsTuvaluUgandaUkraineUnited Arab EmiratesUnited KingdomUnited StatesUruguayUzbekistanVanuatuVatican CityVenezuelaViet NamVirgin Islands, BritishVirgin Islands, USWallis and FutunaWestern SaharaYemenZambiaZimbabwe
Ваш локальный контакт
Синхронные двигатели: проектор / магнитная машина
Моторные моторы на домашних страницах: проектор / магнитная машина
Подробнее изображения
Нажмите здесь для файла PDF
(MOT) SP3949
Hurst (MOT) SP3949
. двигатель с прямым приводом. Синхронный переменный ток с постоянным магнитом. 115 В переменного тока, 300 об/мин, 60 Гц, 14,5 Вт. крутящий момент 20 унций/дюйм. Шарикоподшипники. Серия 73мм. Вал 1/4″ x 9/16″ «D». 2-7/8″Д x 1,84″Д (73мм x 46мм). 2-1/4″ ушки c-c-mount на четырех углах. Модель RA-ET. Колпачок 1,3 мкФ в комплекте. 30 шт./упаковка.
39 долл. США за штуку — 35 долл. США (6+), 31,60 долл. США (30+)
Другие изображения
Щелкните здесь, чтобы просмотреть файл в формате PDF Синхронный переменный ток с постоянным магнитом. 115 В переменного тока, 300 об/мин, 60 Гц, 9 Вт. крутящий момент 10,2 унции/дюйм. Шарикоподшипники. Серия 59мм. Круглый вал 1/4″ x 2″. 2,62″ c-c- монтажные отверстия на алмазной пластине. Стиль ZP, модель SC. 0,85 мкФ, 250 В переменного тока с крышкой. 30 шт./упаковка.0003
Щелкните здесь для просмотра файла в формате PDF
(MOT) SP3951
Реверсивный двигатель Hurst с прямым приводом. Синхронный переменный ток с постоянным магнитом. 115 В переменного тока, 300 об/мин, 60 Гц, 9 Вт. крутящий момент 10,2 унции/дюйм. Шарикоподшипники. Серия 59мм. Вал 1/4″ x 3/4″ «D». 2,62″ c-c- монтажные отверстия на алмазной пластине. Стиль ZP, модель SC. 0,85 мкФ, 250 В переменного тока с крышкой. 30 шт./кор.
(ТО) 34101-61-200-01
Мотроникс Гистерезис синхронного двигателя. 1800 об/мин. 115 В, 60 Гц, 0,007 л.с. Корпус диаметром 3-5/16 дюйма и длиной 4-1/8 дюйма. Ступенчатый вал — диаметр 0,21 дюйма, 0,275 дюйма, 0,479 дюйма. Общая длина 2,125 дюйма. Харрис P/N: 436-0117-000.
*** ПРОДАНО ***
Увеличить изображение | Увеличить изображение |
(ТО) 43H-92
Beau Motor Div . синхронный лентопротяжный двигатель. 117 В переменного тока, 60 Гц, 40 Вт, 1 фаза. 3 скорости (450 — 1800 об/мин) реверсивные. Требуется конденсатор 2,5 мкФ. Корпус диаметром 4 дюйма x вал 5/16 дюйма x 1 дюйм. Harris P/N: 436-0126-000.
$275 шт.
Увеличить изображение
(ТО) 43H-87
Beau Синхронный двигатель с гистерезисом. 450 об/мин. 117 В переменного тока, 60 Гц, 28 Вт. Корпус диаметром 3-7/8 дюйма и длиной 2-1/4 дюйма. Вал имеет диаметр 0,332 дюйма и длину 1,25 дюйма.
350 долларов за штуку
Увеличить изображение
(ТО) 31761R
Synchron Моторы проигрывателя от некогда известного проигрывателя Weathers. Синхронный двигатель достигает
его предопределенные обороты и остается там. В данном случае 600 об/мин. Вал вращается по часовой стрелке, если смотреть на конец вала. Совершенно новый избыток от Compass Technical, последнего производителя продуктов Weathers с 19 века.60-е годы.
- об/мин : 600
- Питание : 110 В переменного тока, 60 Гц, 5 Вт
- Вал : длина 0,062″ x 15/16″
- Корпус : латунь
- Крепление : 4 выступа, по 2 с каждой стороны на расстоянии 2 дюймов от центра к центру
$19 за штуку
Увеличить изображение | Вид сзади
(MOT) K35R
Synchron Синхронный двигатель модели 630. 10 об/мин, 110 В при 60 Гц. Корпус размером 1,48 «Д x 0,83» В. 0,120 «D x 1,14» L «D» вал. 1,53 «х 0,29»
Увеличить изображение
(MOT) S0097080
Bodine проектов, не последним из которых является замена двигателей театральных проекторов.Они достигают и фиксируются при 1200 об/мин!При работе в обратном направлении или когда вал приводится в движение ветряным винтом, как только достигается 1200 об/мин, выходное напряжение и частота постоянна, независимо от небольших изменений скорости. Большинство генераторов имеют трансмиссию для преобразования вращения винтов в соответствии с требованиями генератора. Корпус диаметром 5,5 дюйма и длиной 7,5 дюйма.
Тип 48Y6BFYP, 1200 об/мин, 1/5 л.с., 230 В переменного тока, 3 фазы, 60 Гц, 2,3 А. Вал имеет диаметр 5/8 дюйма и длину 2-1/2 дюйма. Отлично подходит для ветрогенераторов!
$125 за штуку
— $107 (3+)
(MOT) S1210097
Двигатель проектора Bodine идентичен
налево но 208в, 3 фазы. 1200 об/мин, 2,3 ампер. Вал имеет диаметр 5/8 дюйма и длину 2-1/2 дюйма. Отлично подходит для ветрогенераторов!
100 долл. США за штуку — 89 долл. США (3+)
(MOT) 48Y8BFYP
Двигатель проектора Bodine физически
идентичен левому, но 1000 об/мин, непрерывный режим, 380 В, 1,3 А, 50 Гц, 1/5
л.с., 3 фазы. Вал плоский, диаметр 5/8 дюйма. Отлично подходит для ветрогенераторов!
125 долларов за штуку
— $107 (3+)
(MOT) 707884
Сельсин или синхронизатор представляет собой двигатель, который при соединении проводами друг с другом и валом вращается, а другой вал вращается синхронно,
поддержание постоянного углового положения относительно первого вала. Упаковано в вакуумные банки с 1954 года! 90/55 В переменного тока, 60 Гц. Синхронный для «Управления вооружений ВМС США», может торпеда или радар? Производитель Magnovox. Банка с маркировкой «Type 1 HCT Mark II Mod 5». Резьбовой вал 3/16″ с гайкой можно установить на что угодно. Диаметр 2-1/8″, корпус длиной 3-3/8″. Вес 1,25 фунта каждый. Мы были очень рады найти их. Осталось всего около 60 штук.
79 долларов за штуку —
69 долл. США (3+)
(MOT) 7HG
Синхронный преобразователь 115/90 В переменного тока, 3 А, 22 Вт, 60 Гц. МК. 9 MOD 1 Type 7HG, диаметр 5-7/8 дюйма, длина 9 дюймов, 18 фунтов. Конический вал с резьбовым концом 1/4 дюйма.
Двигатели б/у/демонтированы. Государственная цена 1570 долларов за штуку.
Продается как есть, без испытаний.
150 долларов за штуку MOT) D60KBU-1FZ
Гистерезисный синхронный двигатель Ashland . 1500 об/мин, 230 В переменного тока, 50 Гц, 1 фаза, 1/100 л. с. Требуется конденсатор 0,5 мкФ, 460 В переменного тока. 3-1/4″D x 3-1 /2″L. 2″L вал. 3 дюйма по центру резьбового монтажного отверстия. Снова в наличии! Мы продали их дважды!
149 долларов за штуку
Увеличить изображение
(MOT) 1121D0111
Woodward Governor Co . синхронный дифференциальный двигатель. 1964 г. Корпус: 2-1/4″ Д x 3-3/4″ Д. Шлицевой вал 0,193 «D x 0,5» L.
$25 за штуку
Увеличить изображение
(CFO) 0003R00.09.A
Sprague синхронный конденсатор. 3 мкФ
х 3 (тройной), 90В, 60 циклов с двумя монтажными кронштейнами. Мк
19, Мод 0, Тип 4С. 2-1/4″ Ш x 3-3/8″ Д x 3-3/4″ В. NSN: 5910-00-052-5876.
35 долл. США за штуку
(MOT) 2J5h2
General Electric Генератор сельсина. Модель 2Ж5х2. 115-105В @ 60Гц. Шестерня диаметром 4-1/2″, 69 зубьев. 3-1/2″Д x 6″Д.
*** ПРОДАНО ***
Асинхронные двигатели переменного тока и синхронные двигатели с постоянными магнитами
*Изображение предоставлено New Energy and Fuel. com – NE, AC Drives/HMI Department, Fuji Electric Corp. of America, и Sun Y. Kim (Sean), старший региональный менеджер, ACDR/HMI, Fuji Electric Corp. of America
Большинство насосов и вентиляторов, используемых в промышленных и коммерческих целях, в настоящее время приводятся в действие асинхронными двигателями переменного тока. «ACIM», что означает «асинхронный двигатель переменного тока», представляет собой асинхронный тип двигателя, который использует электрический ток для вращения ротора. Крутящий момент создается электрическим током в роторе. Электрический ток генерируется за счет электромагнитной индукции из магнитного поля обмоток статора. В ACIM ротор всегда вращается с меньшей скоростью, чем магнитное поле. «PMSM», что означает «синхронный двигатель с постоянными магнитами», использует магниты для вращения ротора, который вращается с той же скоростью, что и внутреннее вращающееся магнитное поле PMSM.
Существует несколько ключевых различий между асинхронными двигателями переменного тока и синхронными двигателями с постоянными магнитами.
Двигатели с постоянными магнитами ДОЛЖНЫ работать с приводом.
Асинхронные двигатели переменного тока могут использоваться без ЧРП для привода насоса или вентилятора, но часто устанавливаются с частотно-регулируемыми приводами (ЧРП) в насосных системах или системах вентиляторов для повышения эффективности системы. Для работы синхронных двигателей с постоянными магнитами требуется привод. PMSM не может работать без привода. ЧРП требуется для точного управления скоростью СДПМ в соответствии с требованиями приложения по давлению, расходу, объему и т. д. Некоторые новые ЧРП уже поставляются с опциями управления двигателем с постоянными магнитами в качестве стандартной функции, что позволяет операторам управлять двигателем с постоянными магнитами. для более эффективного привода вентилятора и/или насоса.
Двигатели с постоянными магнитами обеспечивают значительное повышение эффективности по сравнению с асинхронными двигателями переменного тока.
КПД двигателя с постоянными магнитами при полной нагрузке выше, чем у асинхронного двигателя переменного тока. На рисунке 1 ниже показаны диапазоны эффективности между двумя стандартами асинхронных двигателей переменного тока и известными опубликованными двигателями с постоянными магнитами.
Рисунок 1 . КПД двигателя с постоянными магнитами по мощности частотно-регулируемого привода. ACIM на синусоиде. Двигатели ACIM теряют от 0,5 до 1,5 балла эффективности при работе от частотно-регулируемого привода.
Важно отметить, что частотно-регулируемые приводы не повышают КПД двигателя; ЧРП помогают повысить эффективность системы в диапазоне рабочих скоростей, поскольку большинство систем не работают постоянно на максимальной скорости. Добавление частотно-регулируемого привода повышает эффективность вашей системы, поскольку он может замедлять двигатель и вентилятор или насос, а не поворачивать клапан, чтобы дросселировать насос, или закрывать заслонку, чтобы блокировать поток воздуха.
Взгляните на рис. 2, на котором сравнивается синхронный двигатель с постоянными магнитами мощностью 10 л. Вы можете видеть, что в обоих случаях КПД обоих типов двигателей падает. КПД NEMA Premium Motor падает примерно с 9от 0% до примерно 72% при 600 об/мин, а ECPM падает примерно с 94% до 83%. Хотя работа системы влияет на эффективность оборудования, было доказано, что двигатели с постоянными магнитами демонстрируют более высокий КПД по сравнению с асинхронными двигателями переменного тока.
Рисунок 2 . Сравнение относительной эффективности двигателей PMSM и ACIM с динамическим диапазоном 3:1.
Преимущества и недостатки двигателей с постоянными магнитами
Хотя асинхронные двигатели переменного тока чаще используются в системах с электроприводом, они часто больше по размеру и менее эффективны, чем двигатели с постоянными магнитами. Хотя решения для двигателей с постоянными магнитами, как правило, имеют более высокую начальную стоимость, они могут предлагать меньшие размеры для более компактных механических блоков и, что более важно, более высокую эффективность.
Двигатели с постоянными магнитами, как правило, дороже, чем асинхронные двигатели переменного тока, и известно, что их сложнее запустить, чем асинхронные двигатели переменного тока. Однако преимущества двигателей с постоянными магнитами включают в себя более высокий КПД (как обсуждалось выше), меньшие размеры (двигатели с постоянными магнитами могут составлять до одной трети размеров большинства двигателей переменного тока, что значительно упрощает установку и обслуживание) и способность СДПМ поддерживать полный крутящий момент на низких скоростях.
Тенденция меняется
Использование СДПМ в сочетании с ЧРП не является чем-то новым; однако инженеры-конструкторы и владельцы оборудования начинают устанавливать больше двигателей с постоянными магнитами для вентиляторов и насосов из-за их меньшего размера и более высокой эффективности. До этого момента частотно-регулируемым приводам требовалась специальная формула для привода двигателя с постоянными магнитами; теперь на рынке доступно несколько новых частотно-регулируемых приводов, которые имеют встроенную стандартную функцию для управления двигателями с постоянными магнитами без дополнительных затрат.
Поскольку все больше производителей VFD начинают добавлять функции для более эффективного управления PMSM, владельцы и операторы будут устанавливать системы двигателей, которые работают более эффективно, в меньших размерах и с меньшими затратами.
Srijan Control
Наша продукция
- Шаговый двигатель постоянного тока
- Синхронные двигатели переменного тока
- Дополнительные аксессуары для коробки передач
- Радиатор
Синхронные двигатели переменного тока
ОБЩИЕ ХАРАКТЕРИСТИКИ
Параметр | Допуск |
Шаг | 1,8°±0,5% некумулятивный |
Сопротивление | ±10% |
Индуктивность | ±30% |
Рост температуры | 65°C макс. |
Диапазон температуры окружающей среды | -10°С + 50°С |
Диапазон температур хранения | -10°С+ 50°С |
Изоляционное сопротивление | 100 М мин. 500 В постоянного тока |
Электрическая прочность штампа | 1500 В переменного тока 1 мин. |
Радиальная игра | 0,50 мм |
Осевой люфт | 0,50 мм Макс. |
- Преимущества синхронного двигателя в системе управления движением
- Экономичное решение при проектировании системы управления движением
- Нет перегорания Низкие обороты.
ПРИМЕНЕНИЕ СИНХРОННОГО ДВИГАТЕЛЯ:
- Сервостабилизатор
- Машина для испытания конденсаторов
- Проектор слайдов
- Дегустационная машина для эмалированной проволоки
- Машина для тестирования бумаги
- Станки для алмазной резки
- Конвейерная система
- Пищевая промышленность
- Фотопечатная машина
- 3-фазный регулируемый трансформатор
- Станок для сверления печатных плат
- Оборудование для показа рекламы
- Автомобильная промышленность
- Отвод фазы перегрузки для масляного трансформатора
ХАРАКТЕРИСТИКИ :
- Мгновенные пусковые, остановочные и реверсивные характеристики.
- Низкая скорость вращения вала 60 об/мин при 50 Гц.
- DC может магнитно заблокировать ротор.
- Нет прогаров из-за блокировки ротора.
- Может быть перегружен без каких-либо повреждений.
- 60 об/мин при 50 Гц.
- Специальная конструкция — 72 об/мин при 60 Гц и 110 В или 230 В переменного тока.
- Отсутствие перегораний на 230 вольт даже при перегрузке или заклинивании вала.
- Мгновенный пуск, останов, реверс.
- Держите двигатель переменного тока.
- Предпочтительная муфта; гибкий, прорезиненный.
- Однофазный и трехфазный с трансформатором Скотта.
- . Однако рекомендуется использовать две фазы.
- Трансформатор для двигателей с большим крутящим моментом.
- Испытано на трансформаторе Скотта на заводе.
При работе этих двигателей от однофазного питания необходимо использовать фазосдвигающий резистор и конденсаторы
КАТАЛОГ СИНХРОННЫХ ДВИГАТЕЛЕЙ:
| Тип | Крутящий момент кг см | Напряжение Вольт | Ток Ампер/Фаза | Сопротивление | Индуктивность мГн | ø мм | Длина мм | Масса кг. (прибл.) | Вт |
| СИН 601 | 2 | 240 | 0,085 | 1,1 кОм | 4,3 | 56,50 | 59 | 0,6 | 1,25 |
| СИН 980 | 3 | 240 | 0,110 | 840 Ом | 3,3 | 86,20 | 65 | 1,3 | 1,85 |
| СИН 981 | 7 | 240 | 0,120 | 840 Ом | 3,2 | 86,20 | 65 | 1,5 | 4. |
| СИН 982 | 14 | 240 | 0,135 | 770 Ом | 4,2 | 86,20 | 78 | 2.0 | 8,60 |
| СИН 983 | 20 | 240 | 0,170 | 770 Ом | 3,2 | 86,20 | 78 | 2.0 | 12.30 |
| СИН 1100 | 10 | 240 | 0,18 | 850 Ом | 6,8 | 108 | 77 | 3,2 | 6.15 |
| СИН 1101 | 20 | 240 | 0,25 | 172 Ом | 1,6 | 108 | 92 | 3,5 | 12. |
| SYN1101(S) | 28 | 240 | 0,32 | 200 Ом | 1,7 | 108 | 110 | 4,5 | 17,27 |
| СИН 1102 | 40 | 240 | 0,425 | 97 Ом | 1 | 108 | 140 | 5,4 | 24.61 |
| СИН 1103 | 60 | 240 | 0,665 | 92 Ом | 1,3 | 108 | 165 | 7,3 | 36,93 |
Дополнительные аксессуары/специальные модели:
- Разъем
- Задний вал
- Увеличенная длина вала
- Дополнительная длина кабеля
- Цилиндрический редуктор
- Радиатор
УСЛОВИЯ:
- Вышеуказанные цены указаны за вычетом наших работ, в Пуне, без учета пересылки,
Страхование и фрахт.