Содержание
8. Синхронные двигатели. Технические средства автоматизации и управления. Учебное пособие
8.1. Принцип действия и виды синхронных двигателей
8.2. Специальные синхронные двигатели
8.2.1. Гистерезисные двигатели
8.2.2. Шаговые двигатели
8.3. Бесконтактные двигатели переменного тока
8.1. Принцип действия и виды синхронных двигателей
Синхронные двигатели СД небольшой мощности применяются в системах автоматики. Поскольку в синхронных двигателях частота вращения жестко связана с частотой питания, такие двигатели применяются либо в системах, требующих строго постоянной частоты вращения, либо при частотном управлении скоростью.
В цифровых системах автоматики находят широкое применение шаговые двигатели, в обмотки статора которых поступают импульсы тока и при поступлении каждого импульсов происходит поворот ротора на определенный угол — двигатель совершает шаг. К группе синхронных двигателей можно отнести также двигатели, частота питания которых зависит от частоты вращения — это так называемые вентильные двигатели.
К группе синхронных двигателей можно отнести также двигатели, частота питания которых зависит от частоты вращения — это так называемые вентильные двигатели.
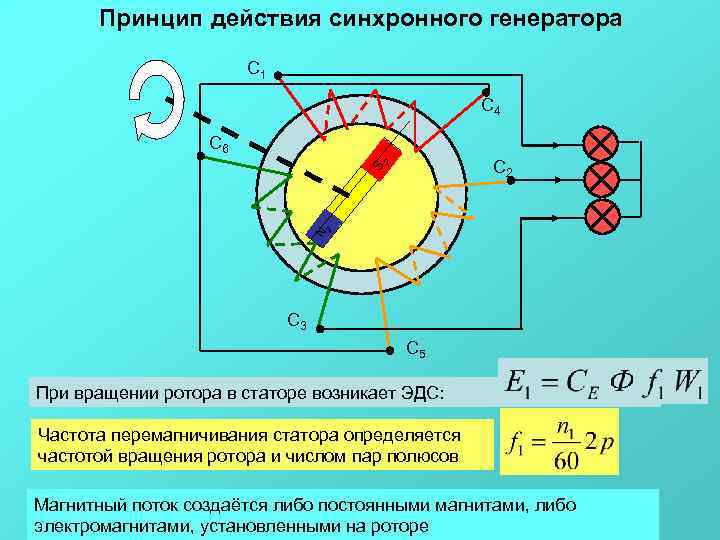
Статор синхронной машины выполнен аналогично статору асинхронной машины. На нем расположена -фазная (обычно трехфазная) обмотка.. Она создают вращающееся магнитное поле. У синхронной машины может быть ротор различного типа. В любом случае ротор СД создает постоянный по величине вектор магнитного потока, направление которого меняется в зависимости от положения ротора. Взаимодействие полей ротора и статор создает вращающий момент двигателя. Наибольший момент возникает тогда, когда угол между векторами полей ротора и статора близок к нулю. Ротор вращается синхронно с полем статора, поэтому двигатель называется синхронным.
|
nр = nс= (60f)/p.
|
(3.1.2)
|
Где f – частота напряжения статора, а p – число пар полюсов.
1. У СД с обмоткой на роторе ротор состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор. Роторы таких машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). Электромагнитная схема синхронной машины имеет вид (рис90):
Рис. 90. Электромагнитная схема СД (а), схема ее включения (б), характеристика (с)
Обмотка ротора 4 состоит из одной или нескольких катушек, образующих многополосную систему с тем же числом пар полюсов р, что и обмотка статора 3. Обмотка ротора соединяется с внешним источником питания Uв посредством контактных колец 5 и щеток 6.
2. Синхронный двигатель, на роторе которого отсутствует обмотка возбуждения, называется синхронным реактивным двигателем.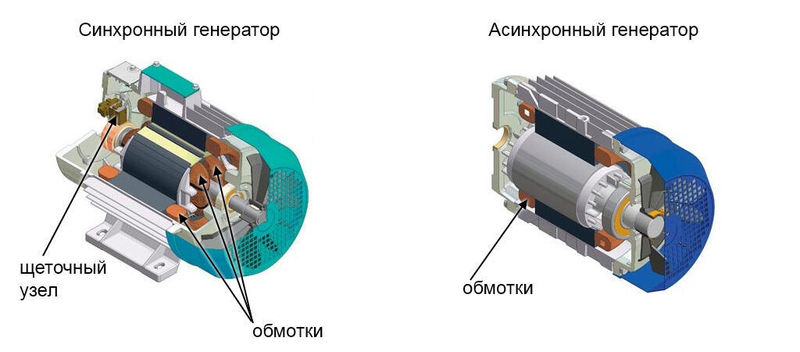 Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Рис. 91.
Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Рис. 91.
Рис. 91. Роторы синхронных реактивных микродвигателей
Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса. Силовые линии магнитного поля статора изгибаются, стремясь пройти по пути с меньшим магнитным сопротивлением. Деформация магнитного поля вызовет, вследствие упругих свойств силовых линий, реактивный момент, вращающий ротор синхронно с полем статора. Если к вращающемуся ротору приложить тормозной момент, ось магнитного поля ротора повернется на угол θ относительно оси магнитного поля статора. С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма. Рис 92..
Рис. 92. Принцип действия синхронного реактивного двигателя
92. Принцип действия синхронного реактивного двигателя
Электромагнитный момент синхронного реактивного двигателя без учета активного сопротивления статора r1 выражается следующей зависимостью:
|
,
|
(3.2.1)
|
где xd и xq — синхронные индуктивные сопротивления по продольной и поперечной осям машины. Начальный пусковой момент у этих двигателей равен 0. Поэтому в них применяется асинхронный способ пуска, для чего используется короткозамкнутая обмотка на роторе. Реактивные двигатели проще по конструкции, дешевле и надежнее в эксплуатации, чем обычные синхронные машины с обмоткой возбуждения на роторе.
Основные недостатки двигателей: низкий cosφ и КПД, большие размеры, малая величина максимального момента. В двигателе мощностью несколько десятков ватт КПД составляет 0,3. ..0,4, а мощностью до 10 ватт — менее 0,2. Так как момент двигателя пропорционален U2, то двигатель чувствителен к колебаниям питающего напряжения.
..0,4, а мощностью до 10 ватт — менее 0,2. Так как момент двигателя пропорционален U2, то двигатель чувствителен к колебаниям питающего напряжения.
3. СД постоянными магнитами. По способу пуска эти двигатели делятся: на самозапускающиеся двигатели и двигатели с асинхронным пуском. Самозапускающиеся двигатели выполняются на небольшие мощности (обычно доли ватта) и низкие частоты вращения (не более 400 об/мин). Они рассчитываются на работу от однофазной сети переменного тока. Их магнитное поле либо пульсирует, либо имеет резко выраженный эллиптический характер. Пуск этих двигателей происходит за полпериода изменения тока за счет всегда существующего в синхронных двигателях пульсирующего момента. Нагрузка должна быть малоинерционной. В противном случае они пускаются в холостую а затем нагружаются. Для пуска используются различные устройства, обеспечивающие вращение двигателя в заданном направлении, например . клювообразные полюса статора -. КПД таких двигателей невелик – 3÷5 % и менее.
КПД таких двигателей невелик – 3÷5 % и менее.
Синхронные микродвигатели с асинхронным пуском имеют на роторе короткозамкнутую обмотку типа «беличьей клетки», которая выполняется в полюсных наконечниках. Эта обмотка во время пуска участвует в создании асинхронного момента и разгоняет двигатель до скорости, близкой к синхронной. В синхронном режиме она демпфирует колебания ротора при резких изменениях нагрузки.
4. Пуск и вход в синхронизм СД.
Недостатком СД является то, что управление скоростью возможно только через изменение частоты вращения поля, а следовательно, частоты питающего напряжения. Недостатком СД является то, что двигатель должен войти в синхронизм, недостатком является также малый пусковой момент, поэтому, чтобы запустить двигатель, необходимы дополнительные меры. У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
Подавляющее большинство синхронных микродвигателей пускается как асинхронные, для чего они или снабжаются пусковой обмоткой или используется схема включения СД с асинхронным запуском. Рис. 93.
Рис. 93. Схема включения СД с асинхронным запуском
Здесь, на роторе находится обмотка, которая в момент запуска замыкается либо накоротко, либо на внешнее сопротивление. В этом случае двигатель ведет себя как асинхронный и у него есть значительный пусковой момент. Когда ротор разгоняется до скорости, близкой к скорости поля, ключ переключается в другое положение и на ротор подается постоянное напряжение. Такой СД при пуске асинхронно разгоняется до 90-95% от скорости поля, затем входит в синхронизацию и далее ведет себя, как синхронный. Есть другая модификация, у которой на роторе есть дополнительная короткозамкнутая обмотка, например, беличья клетка. Эти обмотки работают лишь при запуске. Когда частота вращения ротора приближается к частоте вращения поля, и двигатель вращается с синхронной скоростью, короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Эти обмотки работают лишь при запуске. Когда частота вращения ротора приближается к частоте вращения поля, и двигатель вращается с синхронной скоростью, короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Процесс входа в синхронизм является сложным и ответственным моментом в работе синхронных микродвигателей. Ротор, достигший скорости близкой к синхронной должен за счет взаимодействия полей статора и ротора (в двигателе с постоянными магнитами) или упругих свойств линий поля (в синхронном реактивном двигателе) скачком втянуться в синхронизм. Поэтому момент входа в синхронизм в сильной степени зависит от момента инерции ротора и момента нагрузки.
8.2. Специальные синхронные двигатели
В автоматике используется СД малой мощности, от 0,1 до 500 Вт, Есть различные типы СД: редукторные, гистерезисные, бесконтактные, различные виды шаговых двигателей.
8.2.1. Гистерезисные двигатели
Гистерезисным двигателем называется синхронный двигатель, в котором вращающий момент создается за счет явления гистерезиса при перемагничивания ферромагнитного материала ротора. Статор гистерезисного двигателя подобен статору обычной машины переменного тока. Ротор представляет собой стальной цилиндр из ферромагнитного магнитотвердого материала (имеющего широкую петлю гистерезиса) без обмотки. С целью удешевления ротор делают сборным: кольцо из ферромагнитного материала и немагнитная или магнитомягкая втулка (рис.94).
Рис. 94. Ротор гистерезисного двигателя и схема возникновения гистерезисного момента
В гистерезисном двигателе ротор, вращающийся с синхронной скоростью, представляет собой постоянный магнит. Так как ротор выполнен из магнита твердого материала, то элементарные магнитики перемагничиваются не мгновенно, а с отставанием из-за гистерезиса, это и создает гистерезисный момент. Ось магнита из-за явления гистерезиса отстает от оси вращающегося магнитного поля на угол θг гистерезисного сдвига, вследствие чего возникает тангенциальная составляющая fг сил взаимодействия между полюсами ротора и потоком статора. Величина силы fг и создаваемый ею момент не зависят от скорости вращения, а определяются шириной петли гистерезиса ферромагнитного материала.
Ось магнита из-за явления гистерезиса отстает от оси вращающегося магнитного поля на угол θг гистерезисного сдвига, вследствие чего возникает тангенциальная составляющая fг сил взаимодействия между полюсами ротора и потоком статора. Величина силы fг и создаваемый ею момент не зависят от скорости вращения, а определяются шириной петли гистерезиса ферромагнитного материала.
Если нагрузочный момент больше Мг, то двигатель перейдет в асинхронный режим работы, т.е. появится дополнительный асинхронный момент Ма. Движущий момент ротора создается двумя составляющими: моментом вихревых токов и гистерезисным моментом. Рис. 95.
Рис. 95. Механическая характеристика гистерезисного двигателя
Асинхронный момент Ма есть результат взаимодействия вращающегося магнитного поля с вихревыми токами, которые индуктируются этим полем в сердечнике ротора. Т к. ротор имеет большое активное сопротивление, то характеристика Ма=f(s) практически линейна и асинхронный гистерезисный момент максимален при s=1.Рис. 95.
ротор имеет большое активное сопротивление, то характеристика Ма=f(s) практически линейна и асинхронный гистерезисный момент максимален при s=1.Рис. 95.
,
где П2Н — потери на перемагничивание ротора при неподвижном роторе; Пвихр.Н — потери на вихревые токи при неподвижном роторе;
Двигатель используется в приводах небольшой мощности до 2000 Вт, частота f=50, 400 и 500 Гц.
Достоинства гистерезисного двигателя: простота, надежность, плавность входа в синхронизм, значительный пусковой момент, бесшумность, малый пусковой ток, сравнительно высокий КПД (до 60%).
Недостатки: дороговизна, склонность к качаниям при резких изменениях нагрузки, значительный нагрев ротора.
8.2.2. Шаговые двигатели
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по числу фаз и типу магнитных системна ШД с активным ротором (с постоянными магнитами), ШД реактивного типа и индукторные.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
1. Шаговые двигатели с активным ротором. В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления. Ротор обычно представляет собой многополюсную звездочку из специального сплава. Есть варианты двух-, трех- и четырехфазных двигателей. Трехфазные двигатели имеют лучшие динамические характеристики и более равномерный ход. Управление ШД производится однополярными импульсами, поочередно подаваемыми на обмотки статора. Каждый импульс вызывает поворот ротора на единичный шаг.
Есть варианты двух-, трех- и четырехфазных двигателей. Трехфазные двигатели имеют лучшие динамические характеристики и более равномерный ход. Управление ШД производится однополярными импульсами, поочередно подаваемыми на обмотки статора. Каждый импульс вызывает поворот ротора на единичный шаг.
Рассмотрим принцип действия простейшего двухфазного двухполюсного ШД с активным ротором в виде постоянного магнита. При включении фазы под постоянное напряжение (условно положительной полярности) вектор намагничивающей силы НС статора совпадет с осью фазы А. В результате взаимодействия НС статора с полем постоянного магнита ротора возникнет синхронизирующий момент Мс = Mmaxsinq, где q — угол между осью ротора и вектором НС. Рис. 96.
Рис. 96. Принцип работы ШД
При отсутствии тормозного момента ротор займет положение, при котором его ось совпадет с осью фазы А (рис. 96, первый такт). Если теперь отключить фазу А и включить фазу В, вектор НС и ротор повернуться на 90о(второй такт).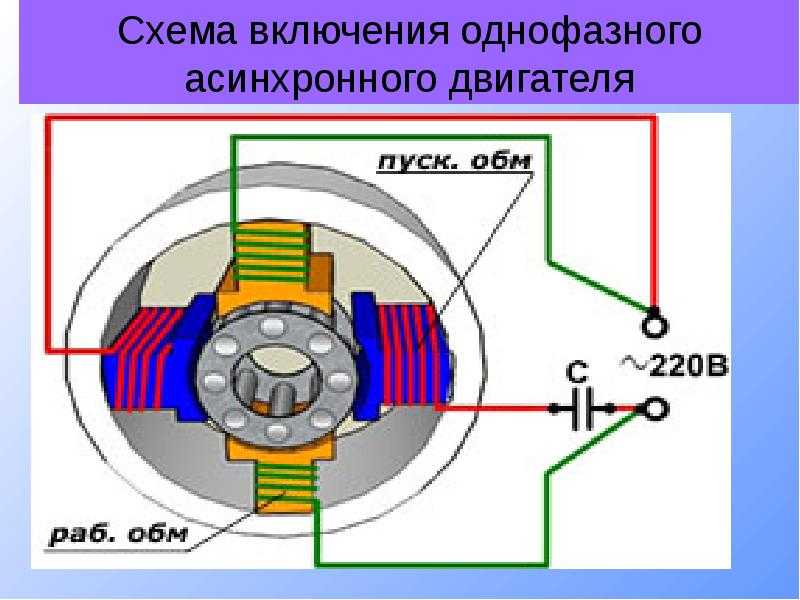 При включении фазы А на напряжение обратной полярности (третий такт) НС и ротор повернутся еще на 90о и т.д.
При включении фазы А на напряжение обратной полярности (третий такт) НС и ротор повернутся еще на 90о и т.д.
Если к ротору ШД приложен момент нагрузки, то при переключении фаз ротор будет отставать от вектора НС на некоторый угол qн = arcsin(Mн/Mmax).
В зависимости от типа электронного коммутатора управление ШД может быть:
- одноплярным или разнополярным;
- симметричным или несимметричным;
- потенциальным или импульсным.
При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U.
Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
При потенциальном управлении напряжение на обмотках изменяется только в моменты поступления управляющих импульсов. При отсутствии управляющего сигнала обмотка или группа обмоток находятся под напряжением, а положение ротора фиксируется полем обмоток. При импульсном управлении напряжение на обмотки подается только на время отработки шаг, после чего оно снимается и ротор удерживается в заданном положении либо реактивным моментом, либо внешним фиксирующим устройством.
При импульсном управлении напряжение на обмотки подается только на время отработки шаг, после чего оно снимается и ротор удерживается в заданном положении либо реактивным моментом, либо внешним фиксирующим устройством.
В двухполюсной машине число устойчивых положений в пределах одного оборота ротора n при разных способах коммутации может быть равно 1, 2, 4m, где m — число фаз: В многополюсных ШД число устойчивых положений возрастает пропорционально числу пар полюсов р.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол поворота ротора, соответствующий одному управляющему импульсу (угол между двумя соседними устойчивыми состояниями): a = 360/pn.
ШД с активным ротором удается выполнить с шагом до 15о. Дальнейшее уменьшение шага ограничено технологическими трудностями создания ротора в виде постоянного магнита с числом пар полюсов больше шести.
2. Реактивные шаговые двигатели. Гораздо более мелкий шаг (до долей градуса) можно получить в реактивных редукторных ШД. Редукторные ШД выполняются с числом фаз m = 2 — 4. Они имеют ферромагнитный зубчатый ротор с равномерно расположенными zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2p/(mzp) рис.97. Число пазов статора и ротора, их геометрические размеры выбираются такими, чтобы обеспечить необходимую величину шага и синхронизирующего момента при заданном виде коммутации токов.
Реактивные шаговые двигатели. Гораздо более мелкий шаг (до долей градуса) можно получить в реактивных редукторных ШД. Редукторные ШД выполняются с числом фаз m = 2 — 4. Они имеют ферромагнитный зубчатый ротор с равномерно расположенными zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2p/(mzp) рис.97. Число пазов статора и ротора, их геометрические размеры выбираются такими, чтобы обеспечить необходимую величину шага и синхронизирующего момента при заданном виде коммутации токов.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и у обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя. Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора. Величина углового шага редукторного шагового двигателя определится выражением: a = 360/Zp. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора. Величина углового шага редукторного шагового двигателя определится выражением: a = 360/Zp. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Индукторные (гибридные) шаговые двигатели. совмещают преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага).
Рис. 96. Конструкция реактивного ШД
Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
3. Режимы работы ШД.
1. Статический режим – это режим, при котором ротор фиксируется в одной из позиций, а по обмоткам статора протекает постоянный ток, создающий неподвижное в пространстве магнитное поле.
2. Квазистатический режим – это режим отработки единичных шагов, при котором переходные процессы от предыдущего такта коммутации полностью затухли и скорость ротора в начале следующего шага равна нулю.
3. Установившийся режим – это режим, соответствующий постоянной частоте следования управляющих импульсов. При частоте управляющих импульсов f1, меньшей частоты собственны колебаний двигателя f0, движение ротора носит колебательный характер, что увеличивает динамическую ошибку при отработке заданного перемещения. При частоте управляющих импульсов f1 = f0/k, где k – целое число, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может привести к нарушению нормального движения ротора и выпадению его из синхронизма.
При f1 > f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты.
4. Переходный режим — это основной эксплуатационный режим работы ШД. Он включает в себя пуск, реверс, торможение, переход с одной управляющей частоты на другую. Основное требование к ШД в переходных режимах заключается в отсутствии потери шага, т.е. сохранение синхронизма при любом характере изменения управляющих импульсов.
 При f1 > f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты.
При f1 > f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты.Предельная механическая характеристика – это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы (рис.97). С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю. Предельную механическую характеристику рассматривают обычно при f>f0.
Рис. 97. Механические характеристики ШД
97. Механические характеристики ШД
Максимальная частота управляющих импульсов, при которой возможен пуск без потери шага, называется частотой приемистости fпр. Частота приземистости является важным показателем переходного режима ШД Частота приемистости растет с увеличением максимального синхронизирующего момента, уменьшением шага, снижением постоянной времени обмоток, нагрузки и момента инерции. Для современных ШД fпр = 100-1000 Гц.
Предельная динамическая характеристика – зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки. Такие характеристики называются предельными динамическими характеристиками пуска. Существуют также предельные динамические характеристики реверса и торможения
8.3. Бесконтактные двигатели переменного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 98):
- двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
- датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
- коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.

Рис. 98. Состав бесконтактного двигателя постоянного тока
Принцип действия подобен ДПТ:: при включении транзисторов Т1 и Т2 по обмотке статора потечет ток i в указанном направлении. В статоре возбудится магнитное поле, появится движущий момент, ротор повернется таким образом, чтобы векторы Fc и Fp совместились. Когда векторы совместятся, сигнал с ДПР закроет Т1 и Т2 и откроет Т3 и Т4. Ток в обмотке статора поменяет направление, движущий момент заставит ротор вращаться дальше и повернуться на 180°.
Для плавного хода число обмоток обычно 3 и выше. В этой схеме транзисторы и коммутатор работают в ключевом режиме. Транзисторами управляют схемы формирования Фа, Фб, Фс. На эти схемы подаются управляющие импульсы с датчика положения ротора. ДПР имеет и статор и ротор. На статоре имеются полюса, на которых поочередно располагаются обмотки управления а, б, с и обмотки возбуждения (5-30 кГц). Ротор ДПР имеет сектор из магнита мягкого материала. При повороте этот сектор замыкает два соседних полюса и в соответствующей обмотке управления наводится ЭДС, включается соответствующая статорная обмотка и роторы двигателя и ДПР поворачиваются на 120°. Затем сектор замыкает два следующих полюса, в результате роторы поворачиваются еще на 120° и т.д.
Ротор ДПР имеет сектор из магнита мягкого материала. При повороте этот сектор замыкает два соседних полюса и в соответствующей обмотке управления наводится ЭДС, включается соответствующая статорная обмотка и роторы двигателя и ДПР поворачиваются на 120°. Затем сектор замыкает два следующих полюса, в результате роторы поворачиваются еще на 120° и т.д.
Рис. 99. Схема бесконтактного двигателя постоянного тока.(а) и его механические характеристики (б)
На рис. 99 показаны схема и механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
Схема подключения синхронного двигателя переменного тока
Содержание
- Устройство синхронного двигателя
- Как работает синхронный двигатель
- Схема запуска двигателя и его регулировка
- Различия синхронных и асинхронных двигателей
- Конструктивные особенности и принцип работы
- Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
- Достоинства и недостатки
- Синхронные электродвигатели имеют и другие достоинства:
- Недостатками являются следующие отрицательные моменты:
- Выбор двигателя
- К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Сфера применения
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Устройство синхронного двигателя
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала.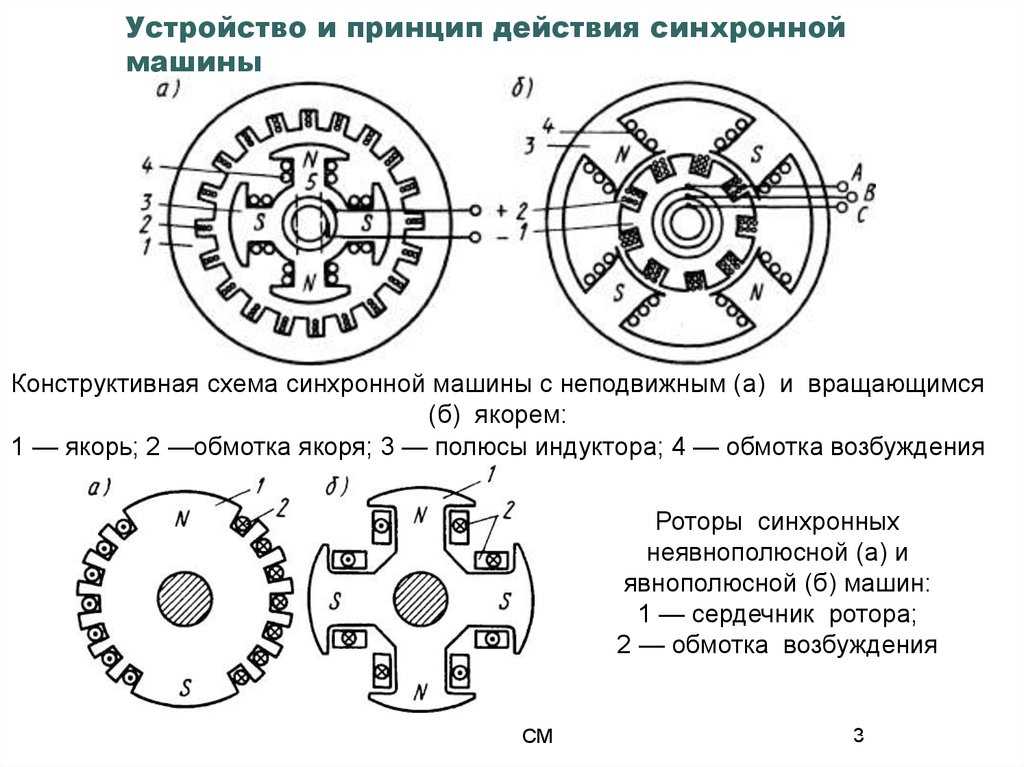 В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
 Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.
Схемы управления синхронными двигателями можно условно разделить на релейно-контакторные, применяемые для пуска, синхронизации с сетью и останова нерегулируемых по скорости электроприводов, и схемы с силовыми преобразователями, предназначенные для регулирования переменных ЭП с синхронными двигателями.
Релейно-контакторные схемы управления двигателей кроме операций по включению и отключению двигателя, ограничению пусковых токов и его синхронизации с сетью должны обеспечивать и соответствующее регулирование тока возбуждения. Электротехническая промышленность выпускает широкую номенклатуру типовых панелей и шкафов управления для синхронных двигателей различных мощностей и уровней номинального напряжения.
Типовая схема управления возбуждением двигателя в функции скорости. Подключение обмотки возбуждения к источнику питания UB осуществляется контактором КМ2 (рис. 6.10, а), который управляется реле скорости KR. Катушка этого реле связана с частью разрядного резистора Rp через диод VD.
Катушка этого реле связана с частью разрядного резистора Rp через диод VD.
При включении контактора КМ1 (его цепи управления на рисунке не показаны) обмотка статора двигателя подключается к сети переменного тока и образует вращающееся магнитное поле, под действием которого он начнет разбег и которое наведет ЭДС в обмотке возбуждения двигателя. Под действием ЭДС по катушке реле KR начнет протекать выпрямленный ток, оно включится и разомкнет цепь питания контактора КМ2. Разбег двигателя будет происходить без тока возбуждения с закороченной на разрядный резистор Rp обмоткой возбуждения.
По мере роста скорости ротора его ЭДС и ток в катушке реле KR, снижаются. При подсинхронной скорости ток в катушке реле KR станет меньше тока отпускания, реле отключится и вызовет тем самым включение контактора КМ2. Контактор КМ2 подключит обмотку возбуждения к источнику питания. Далее происходит процесс синхронизации СД с сетью.
Схема управления возбуждением двигателя в функции тока (рис. 6.10, б) содержит реле тока КА, обмотка которого питается от трансформатора тока ТА, и реле времени КТ. При подключении двигателя к сети контактором КМ1 в цепи обмотки статора возникает бросок пускового тока, что приводит к срабатыванию реле КА. Контакт этого реле замыкает цепь питания реле времени КТ, что вызывает отключение контактора возбуждения КМ2. Разбег двигателя, как и в предыдущем случае, осуществляется с закороченной на разрядный резистор Rp обмоткой возбуждения.
Рис. 6.10. Схемы управления пуском двигателя с использованием принципа
скорости (а) и тока (б)
В конце пуска при подсинхронной скорости двигателя и уменьшении тока в статоре реле КА отключается и катушка реле времени КТ теряет питание. Через заданную выдержку времени включается контактор КМ2, и через его контакты обмотка возбуждения подключается к источнику питания U , после чего двигатель втягивается в синхронизм.
Отметим, что в рассмотренных схемах после срабатывания контактора возбуждения КМ2 разрывается цепь разрядного резистора Rp, что облегчает тепловой режим его работы и повышает экономичность схемы.
Электротехническая промышленность выпускает типовые панели и шкафы управления синхронными двигателями разных типов. Рассмотрим в качестве примера схему одной из таких панелей.
Схема типовой панели ПУ 7502управления низковольтным синхронным двигателем приведена на рис. 6.11. Панель управления обеспечивает прямой (без токоограничения) пуск с глухоподключенным возбудителем G и форсировку возбуждения при снижении уровня питающего напряжения. В схеме предусмотрены также защиты: тепловая (реле КК и трансформаторы тока ТА1 и ТА2), токовая (автоматы QF1 и QF2), от снижения напряжения сети переменного тока (реле KV2, KV3) и постоянного тока (реле KV1).
Пуск двигателя может быть осуществлен только при нормальных уровнях питающих схему напряжений постоянного и переменного тока. В этом случае, если рукоятка командоконтроллера SA находится в среднем положении и включены автоматы QF1 и QF2, срабатывают реле напряжения KV2, KV3 и реле времени КТ, что подготавливает схему к пуску двигателя.
В этом случае, если рукоятка командоконтроллера SA находится в среднем положении и включены автоматы QF1 и QF2, срабатывают реле напряжения KV2, KV3 и реле времени КТ, что подготавливает схему к пуску двигателя.
При переводе рукоятки SA в положение «Включено» срабатывает реле KV1 и катушка линейного контактора КМ1 подключается к ис-
Рис. 6.11. Схема синхронного электропривода с использованием типовой панели управления
точнику питания, к обмотке статора двигателя подводится напряжение переменного тока, и он начинает разбег. При подсинхронной скорости происходит возбуждение возбудителя G и соответственно двигателя, который втягивается в синхронизм.
При резком снижении питающего напряжения происходит включение контактора КМ2, который при этом шунтирует резистор форсировки /?ф. В результате возрастают токи возбуждения возбудителя и двигателя, увеличивается его ЭДС, что приводит к увеличению максимального момента и соответственно перегрузочной способности двигателя.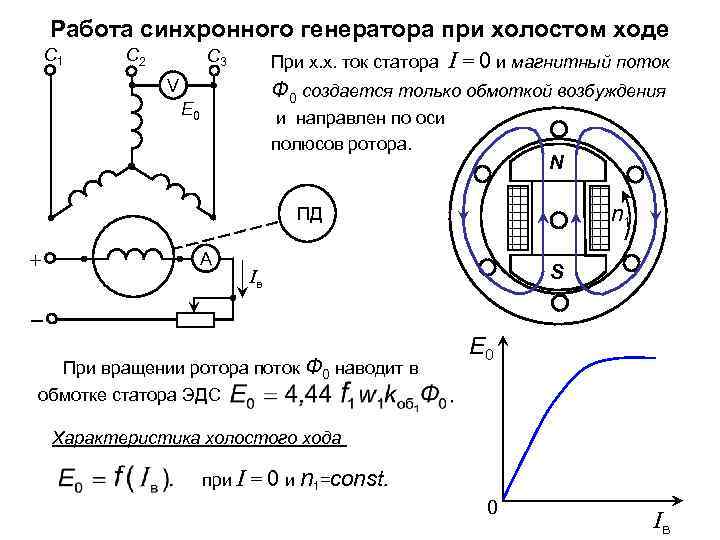 О включении контактора форсировки КМ2 сигнализирует указательное реле КН.
О включении контактора форсировки КМ2 сигнализирует указательное реле КН.
Для контроля тока статора двигателя в схеме предусмотрен амперметр РА1, а тока возбуждения — амперметр РА2, питаемый от шунта RS.
Замкнутая схема ЭП с вентильным двигателем, предназначенная для регулирования его скорости (рис. 6.12), построена по принципу подчиненного регулирования координат и включает в себя управляемый выпрямитель УВ, коммутатор (инвертор) К, реактор L, регуляторы тока РТ и скорости PC, датчики тока ДТ, скорости ДС и положения ДП. Схема обеспечивает механические характеристики ЭП, аналогичные показанным на рис. 5.36, б.
По замкнутым структурам построены схемы автоматического регулирования возбуждения (АРВ) синхронных двигателей.
Рис. 6.12. Замкнутая схема вентильного двигателя
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме.
 При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
 КПД синхронного мотора выше при той же мощности асинхронного двигателя.
КПД синхронного мотора выше при той же мощности асинхронного двигателя.Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю.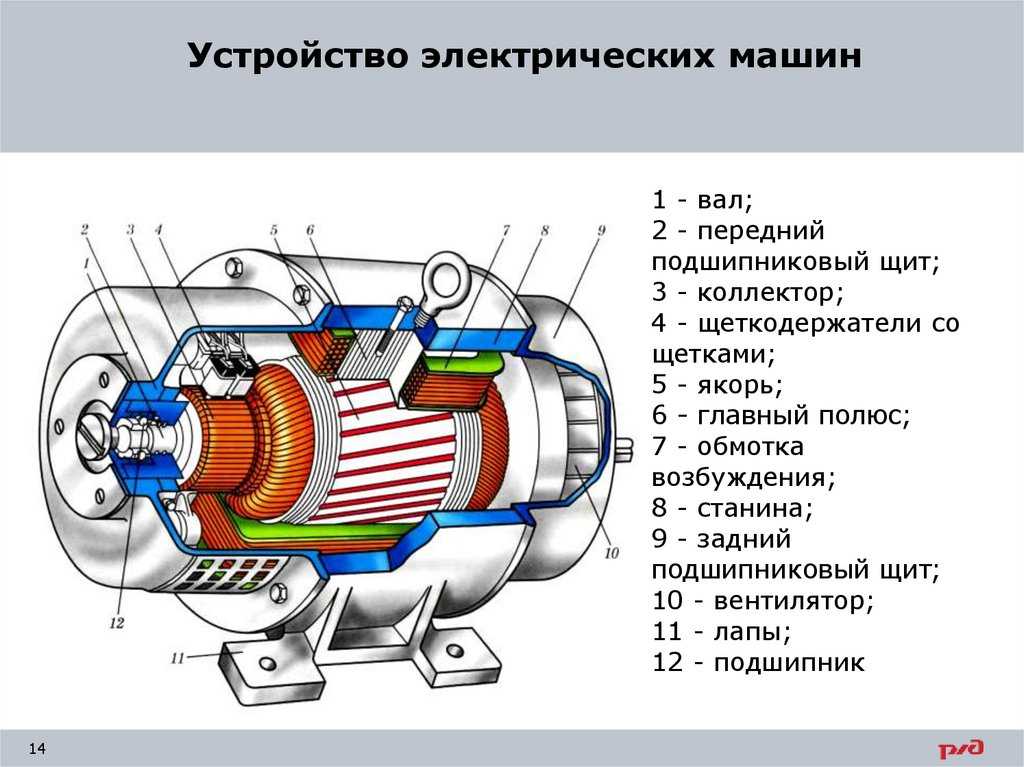 Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Синхронные двигатели NORD DRIVESYSTEMS
Наши синхронные двигатели работают чрезвычайно эффективно. Поэтому они идеально подходят для использования в энергоемких приложениях, таких как интралогистика.
Синхронные двигатели IE5+ (TEFC)
Эффективный и компактный
- Производительность:
0,35 кВт — 4,00 кВт - Новый уровень энергоэффективности: IE5+
- Сертификаты и признание во всем мире
- Компактный дизайн
- Постоянный крутящий момент и КПД в широком диапазоне скоростей
Подробная информация о продукте
Синхронные двигатели IE5+ (TENV)
Эффективный. Гигиенический. Компактный.
- Производительность:
0,35 кВт — 2,2 кВт - Класс защиты:
IP69K - Класс эффективности: IE5+
- Дополнительная обработка поверхности nsd tupH™ и IP69K
- Сертификаты и признание во всем мире
- Компактный, гигиеничный дизайн
- Постоянный крутящий момент и КПД в широком диапазоне скоростей
Подробная информация о продукте
Стандартные синхронные двигатели
Синхронные двигатели
- Производительность:
1,1 кВт — 5,5 кВт - Класс эффективности IE4
- Глобальные одобрения и приемки
Подробная информация о продукте
Синхронные двигатели
Максимальная эффективность
Синхронные двигатели NORD отличаются чрезвычайно высоким КПД и очень высокой удельной мощностью. Благодаря этим превосходным свойствам может быть достигнута значительная экономия энергии, особенно при непрерывном режиме работы.
Благодаря этим превосходным свойствам может быть достигнута значительная экономия энергии, особенно при непрерывном режиме работы.
Двигатели NORD IE4 используются во всем мире, особенно во внутренней логистике (например, в распределительных центрах и аэропортах), а также в насосах, вентиляторах и т. д.
Наши двигатели переменного тока: высокая эффективность, низкое энергопотребление Эффективность
Наши двигатели переменного тока имеют очень высокий КПД. В отличие от обычно используемых асинхронных двигателей, этот КПД остается неизменным даже при работе с частичной нагрузкой и на низких скоростях.
Синхронные двигатели NORD DRIVESYSTEMS обеспечивают впечатляющий крутящий момент и высокую перегрузочную способность до 300 %.
Синхронные двигатели NORD доступны в версии с промывкой без вентилятора, и при необходимости они также могут быть защищены высокоэффективной защитой от коррозии nsd tupH.

Благодаря высокой удельной мощности наши синхронные двигатели имеют компактную конструкцию и поэтому могут быть легко установлены в ограниченном пространстве.
Эффективнее, чем предписано: энергосберегающие двигатели NORD
Чрезвычайно эффективная работа двигателей переменного тока NORD достигается за счет использования постоянных магнитов, которые устраняют необходимость во внешнем источнике энергии для создания магнитного поля. Благодаря этой технологии наши синхронные двигатели IE4 значительно более эффективны, чем это требуется в настоящее время по мировым стандартам. Энергосберегающие двигатели NORD значительно снижают ваши эксплуатационные расходы. Инвестиции в эти диски часто окупаются менее чем за два года (ROI).
Хотите узнать больше о наших высокоэффективных двигателях IE4?
Нажмите здесь
Двигатели NORD IE4 Уменьшите количество вариантов
Благодаря использованию постоянных магнитов и превосходному рассеиванию тепла наши синхронные двигатели имеют высокую удельную мощность и более высокий максимально достижимый крутящий момент, чем аналогичные приводы.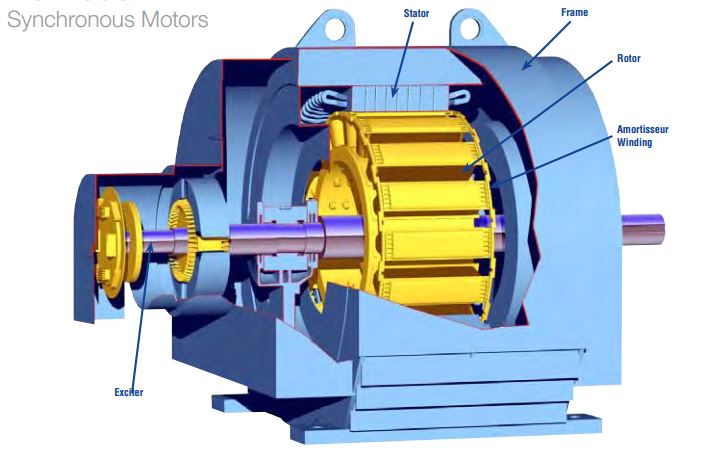
Благодаря своей компактной конструкции асинхронные двигатели NORD легко интегрируются в ограниченное пространство. Благодаря широкому частотному диапазону наших двигателей IE4 (до 70 Гц) пользователи также могут уменьшить количество используемых версий привода.
Двигатели NORD с гладким корпусом идеально подходят для пищевой промышленности
Асинхронные двигатели NORD не только компактны и мощны, но и легко чистятся. Благодаря своей гигиеничной, легко моющейся поверхности моющийся вариант, как плавный двигатель, идеально подходит для использования в пищевой промышленности. Коррозионностойкий алюминиевый корпус имеет класс защиты IP69K и может подвергаться очистке под давлением. При необходимости мы можем опционально герметизировать двигатели с помощью инновационной обработки поверхности nsd tupH.
Узнайте о преимуществах синхронных двигателей NORD.
Узнать больше
Разница между синхронным двигателем и асинхронным двигателем
Электродвигатели переменного тока можно разделить на две основные категории: (i) Синхронный двигатель и (ii) Асинхронный двигатель . Асинхронный двигатель обычно называют асинхронным двигателем. Оба типа сильно отличаются друг от друга. Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже.
Асинхронный двигатель обычно называют асинхронным двигателем. Оба типа сильно отличаются друг от друга. Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже.
Конструктивное отличие
- Синхронный двигатель : Статор имеет осевые пазы, которые состоят из обмотки статора, намотанной на определенное количество полюсов. Как правило, используется ротор с явно выраженными полюсами, на котором установлена обмотка ротора. Обмотка ротора питается от источника постоянного тока с помощью контактных колец. Можно также использовать ротор с постоянными магнитами.
Синхронный двигатель - Асинхронный двигатель : Обмотка статора аналогична обмотке синхронного двигателя. Наматывается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой. В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко концевыми кольцами. В фазном роторе обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
Асинхронный двигатель
 В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко концевыми кольцами. В фазном роторе обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко концевыми кольцами. В фазном роторе обмотки также постоянно закорочены, поэтому контактные кольца не требуются. Разница в работе
- Синхронный двигатель : Полюса статора вращаются с синхронной скоростью (Ns) при трехфазном питании. Ротор питается от источника постоянного тока. Ротор должен вращаться со скоростью, близкой к синхронной скорости во время запуска. В этом случае полюса ротора магнитно соединяются с вращающимися полюсами статора, и, таким образом, ротор начинает вращаться с синхронной скоростью.
- Синхронный двигатель всегда работает со скоростью, равной его синхронной скорости.
т. е. фактическая скорость = синхронная скорость
или N = Ns = 120f/P - Узнайте больше о работе синхронного двигателя здесь.
- Асинхронный двигатель : когда статор питается от двух- или трехфазного переменного тока, создается вращающееся магнитное поле (RMF). Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора. Ток ротора вызывает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его возникновения, то есть относительной скорости между RMF статора и ротора. Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.
- Асинхронный двигатель всегда работает со скоростью, которая меньше синхронной скорости.
т. е. N < Ns - Узнайте больше о работе асинхронного двигателя здесь.
Другие отличия
- Для синхронных двигателей требуется дополнительный источник постоянного тока для питания обмотки ротора. Асинхронные двигатели не требуют дополнительного источника питания.
