Содержание
УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
Двигатели постоянного тока нашли множество применений, но непрерывное и плавное вращение ротора не всегда требуется. Естественная особенность двигателя BLDC, заключающаяся в том, что для его вращения необходимо постоянно переключать напряжения между обмотками, способствовала развитию шаговых двигателей. Их ротор может вращаться с определенными приращениями и оставаться стабильным в этих состояниях даже если управление прерывается. Возобновление подачи напряжения на катушки вызывает продолжение вращения.
Шаговые двигатели не имеют коммутаторов и щеток. Это синхронные двигатели постоянного тока с электронно-коммутируемым магнитным полем, вызывающим вращение якоря (его магнитов). Можно считать, что шаговые двигатели управляются цифровыми импульсами, и в шаговом двигателе полный угол поворота ротора разделен на дискретное количество шагов. Количество этих ступеней (фаз) равно количеству магнитов, расположенных вокруг центрального сердечника.
Конструкция шагового двигателя
Теория работы шаговых двигателей. В отличие от двигателей постоянного или переменного тока, для шаговых двигателей требуется последовательное питание, то есть они должны получать фиксированную последовательность импульсов для отдельных катушек. Также бывают биполярные и униполярные двигатели. Униполярный шаговый двигатель отличается от биполярного тем, что имеет дополнительный отвод обмотки, который разделяет обмотку на две части. Обычно биполярный шаговый двигатель имеет 4 или 8 контактов, а униполярный – 5 или 6 контактов.
Схема униполярных и биполярных шаговых двигателей
Вначале рассмотрим униполярный шаговый двигатель, ввиду простоты управления. В таком моторе ток в обмотке всегда течет в одном направлении. Это упрощает метод управления, в отличие от биполярного, где управление должно обеспечивать изменение полярности катушек шагового двигателя путем изменения направления тока через обмотку на противоположное.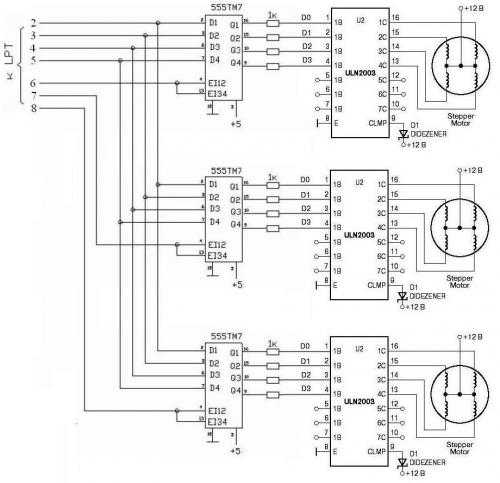
Двух переключателей достаточно, чтобы построить простейший драйвер шагового двигателя, как показано на рисунке. Здесь используем 6-проводный униполярный двигатель. Также можно сказать, что двигатель в этом случае управляется однополярно, за счет использования средней обмотки катушки и постоянного напряжения питания на нее.
Переключая данные переключатели в последовательности S1, S2, S1, S2, S1, S2… заметим, что двигатель вращается. Рисунок выше иллюстрирует важный принцип управления: обе обмотки не могут питаться от одной пары одновременно. Каждое изменение переключателя поворачивает ротор на один шаг. Чем быстрее начнем переключать переключатели в последовательности S1, S2, S1, S2…, тем быстрее начнет вращаться ротор.
Подключение переключателей к катушкам шагового двигателя
Скорость шагового двигателя зависит не от величины напряжения, а от скорости подключения питания к отдельным обмоткам. Чтобы добиться полного вращения ротора с 200-шаговым двигателем, надо изменить положение каждого переключателя 100 раз, то есть выполнить до 200 последовательностей для двух переключателей. Это уже говорит о том, что шаговые двигатели не могут работать на высокой скорости. Из этого следует, что шаговые двигатели можно назвать «цифровыми двигателями», поскольку для вращения ротора необходимо переключать переключатели в соответствующей последовательности.
Это уже говорит о том, что шаговые двигатели не могут работать на высокой скорости. Из этого следует, что шаговые двигатели можно назвать «цифровыми двигателями», поскольку для вращения ротора необходимо переключать переключатели в соответствующей последовательности.
В нашем случае последовательность переключений также определяет направление вращения шагового двигателя. Когда меняем последовательность включения переключателей, то меняем и направление вращения, например S2, S1, S2, S1, S2, S1… влево, S1, S2, S1, S2, S1, S2… вправо. В этом примере есть двухпозиционные переключатели, которые всегда обеспечивают питание двух из четырех обмоток шагового двигателя в данный момент. Но использование трехпозиционных переключателей дает гораздо больше возможностей.
Опять же, обе обмотки никогда не питаются от одной пары, что является обязательным принципом управления шаговым двигателем. Благодаря трехпозиционным переключателям можно реализовать, например, полушаговое управление, благодаря разнообразию переключений. Одновременно могут быть под напряжением две, одна или ни одной из обмоток.
Одновременно могут быть под напряжением две, одна или ни одной из обмоток.
На практике вместо переключателей используются биполярные транзисторы, чаще можно встретить драйверы на основе полевых МОП-транзисторов, благодаря возможности пропускания большего тока, а также возможности их перегрузки. Транзистор здесь действует как переключатель, он либо закрыт, либо полностью открыт.
Упрощенная схема управления униполярным шаговым двигателем
Чтобы управлять таким мотором, надо обеспечить соответствующую последовательность импульсов. Например, только одна из четырех обмоток шагового двигателя находится под напряжением одновременно (это своего рода волновое управление). На каждый цикл двигателя подается питание на одну из четырех катушек униполярного шагового двигателя. Вращение его будет выглядеть так:
Вращение униполярного шагового двигателя в последовательных тактах цикла управления волной
Управляющая последовательность A +, B +, A-, B- повторяется каждые четыре импульса тактового генератора. Этот тип управления называется однофазным или волновым. Это полный шаг управления, потому что двигатель выполняет один полный ход (шаг) с одним импульсом генератора.
Этот тип управления называется однофазным или волновым. Это полный шаг управления, потому что двигатель выполняет один полный ход (шаг) с одним импульсом генератора.
Последовательность импульсов A +, B +, A -, B – вращает двигатель в одном направлении. Смена полюсов статора (N, S) заключается в питании соответствующей катушки (A + или A -).
Самый простой способ изменить направление – поменять местами одну пару проводов катушки (поменять местами, например, B + с B – и B – с B +), затем дадим последовательность A +, B -, A -, B + импульсы, он вращает двигатель в противоположном направлении. Так управление направлением реализовано в некоторых контроллерах шаговых двигателей. Самый простой способ изменить последовательность импульсов – использовать, например, реле.
Форма волны (однофазная) импульсная последовательность драйвера
Упрощенная схема однофазного (волнового) регулятора с изменением направления вращения
Несомненное преимущество униполярных шаговых двигателей – простота управления. Но это связано с волновым управлением, с использованием только половины обмотки за раз, одна из них всегда не используется. Используется только 1/4 всех обмоток шагового двигателя, что значительно снижает максимальную производительность.
Но это связано с волновым управлением, с использованием только половины обмотки за раз, одна из них всегда не используется. Используется только 1/4 всех обмоток шагового двигателя, что значительно снижает максимальную производительность.
Двухфазное управление шаговым мотором
Гораздо лучшей альтернативой однофазному управлению будет двухфазное, при котором работают две из четырех обмоток шагового двигателя. В таком управлении используем 1/2 всех обмоток. Тогда мотор станет более эффективен.
Вращение двигателя при двухфазном полноступенчатом управлении
Две катушки шагового двигателя всегда находятся под напряжением. Опять же, мы никогда не питаем две катушки из одной пары одновременно. С каждым импульсом от генератора переключается только одна катушка из отдельных пар (последовательно). В первом цикле катушки A и B находятся под напряжением, во втором катушка A все еще находится под напряжением, в то время как катушка B переключается на B +, в третьем цикле катушка B + находится под напряжением из второго цикла, и катушка A переключается на A + и так далее.
Двухфазная последовательность управляющих импульсов
Формы сигналов A + и B + сдвинуты друг к другу (две из четырех обмоток всегда работают в заданном цикле), а сигналы A + и B- инвертируются с сигналами A + и B +. Такие формы сигналов (смещенные относительно друг друга) легко генерируются, например, благодаря интегральной микросхеме 4013, которая имеет два D-триггера. Также можно использовать микроконтроллер. Изменение направления вращения в таком контроллере, как и при однофазном (волновом) управлении, может быть реализовано путем изменения направления проводов одной пары концов катушки (изменение с A + на A – и A – на A +). Чаще всего изменение скорости основано на изменении логики последовательности управляющих импульсов. Мы можем сделать это, например, используя логические элементы XOR, которые будут отрицать сигналы (инвертировать их).
Упрощенная схема двухфазного контроллера с изменением направления вращения, D-триггерами для создания смещенных сигналов и логическими вентилями XOR
Оба типа управления представленные выше: однофазный (волновой) и двухфазный (инвертированные сигналы, управляющие транзисторами), в просторечии, являются униполярными типами управления, потому что используем униполярные шаговые двигатели с дополнительными ответвлениями обмотки. Также в биполярных шаговых двигателях, где работает вся обмотка, мы встречаемся с однофазным и двухфазным управлением, там идея работы аналогична.
Также в биполярных шаговых двигателях, где работает вся обмотка, мы встречаемся с однофазным и двухфазным управлением, там идея работы аналогична.
Также стоит упомянуть моторы VR (реактивного сопротивления). Двигатели VR обычно имеют три обмотки. Чтобы управлять таким двигателем, нам нужно подавать отдельные обмотки одну за другой в последовательности A, B, C, A, B, C… это заставит двигатель вращаться в одном направлении, в то время как последовательность питания обмотки A, C, B, A, C, B… заставит его вращаться в противоположном направлении. Самый простой способ изменить направление – поменять местами концы двух обмоток шагового двигателя VR, и проще всего это сделать с помощью реле.
Упрощенная схема драйвера резистивного шагового двигателя
Последовательность импульсов управления шаговым двигателем
Последовательность импульсов драйвера реактивного шагового двигателя очень похожа на волновое управление.
Биполярное управление обеспечивает более эффективное использование шагового двигателя, при котором всегда работает вся обмотка шагового двигателя, что дает гораздо лучшую производительность на низких и средних скоростях. А крутящий момент примерно на 30 – 40% больше. Но для этого требуется изменить полярность питания катушки, изменив направление тока в обмотках (например поменяв местами концы катушек). Для этого используются два транзисторных моста H (название происходит от сходства с буквой H на схеме), которые состоят из двух ветвей, а каждая ветвь состоит из двух транзисторов. Чаще всего для построения такого моста используются биполярные транзисторы NPN или MOSFET N.
А крутящий момент примерно на 30 – 40% больше. Но для этого требуется изменить полярность питания катушки, изменив направление тока в обмотках (например поменяв местами концы катушек). Для этого используются два транзисторных моста H (название происходит от сходства с буквой H на схеме), которые состоят из двух ветвей, а каждая ветвь состоит из двух транзисторов. Чаще всего для построения такого моста используются биполярные транзисторы NPN или MOSFET N.
Биполярный драйвер требует более сложного управления из-за того, что нужно управлять каждым из восьми транзисторов индивидуально. Взамен получаем все возможности шагового двигателя, хотя реализация такого типа управления не самая простая.
Принцип работы такого моста основан на том, что если верхний транзистор проводит в одной ветви, а нижний транзистор в другой, и наоборот, то через катушку шагового двигателя будет протекать ток. Если два верхних или два нижних транзистора проводят одновременно в двух ветвях одного моста, то ток через катушку не будет протекать. Путем соответствующего управления транзисторами получаем изменение направления тока, протекающего через катушку, и, таким образом, изменение полярности катушки.
Путем соответствующего управления транзисторами получаем изменение направления тока, протекающего через катушку, и, таким образом, изменение полярности катушки.
Также в биполярных контроллерах имеем дело с однофазным (волновым) и двухфазным управлением. Оба элемента управления являются полношаговыми. При однофазном управлении, как и в униполярных шаговых двигателях, в следующем цикле запитывается только одна катушка,
Вращение биполярного шагового двигателя в последовательных тактах однофазного (волнового) цикла управления
Вращение биполярного шагового двигателя в последовательных тактах двухфазного цикла управления
Упрощенная схема драйвера для биполярных двигателей с транзисторными Н-мостами
Последовательность импульсов для питания катушек идентична униполярному двигателю, но в этом случае нет четырех сигналов на транзисторы, только восемь сигналов на восемь транзисторов. Каждым из них нужно управлять индивидуально, переключая соответствующие транзисторы в нужный момент. Ток протекает через катушку, когда один верхний транзистор и один нижний транзистор включены «крест-накрест», то есть 1 и 3 на схеме, другие 2 и 4 в катушке A шагового двигателя закрыты. Но когда выключаем 1 и 3 и включаем 2 и 4, то меняем направление тока в катушке.
Ток протекает через катушку, когда один верхний транзистор и один нижний транзистор включены «крест-накрест», то есть 1 и 3 на схеме, другие 2 и 4 в катушке A шагового двигателя закрыты. Но когда выключаем 1 и 3 и включаем 2 и 4, то меняем направление тока в катушке.
Включаем транзисторы «крестом» в катушке A и B. Напряжение питания катушки задается как в униполярном управлении, в то время как «массовый» транзистор подключается крест-накрест к присоединенному верхнему силовому транзистору. Можем если надо изменить скорость, изменив управление двумя концами одной катушки, что приведет к другой последовательности импульсов. Самый простой способ – использовать реле, как при униполярном управлении, также можно реверсировать сигналы, управляющие транзисторами.
Ход управления катушками в биполярном шаговом двигателе волнового управления
Чтобы понять идею, можно сказать что на схеме показано питание проводов биполярного шагового двигателя, т.е. высокое состояние означает напряжение на конкретном проводе (A +, B +, A -, B -), а низкое состояние – появление заземления на отдельных проводах в заданном цикле.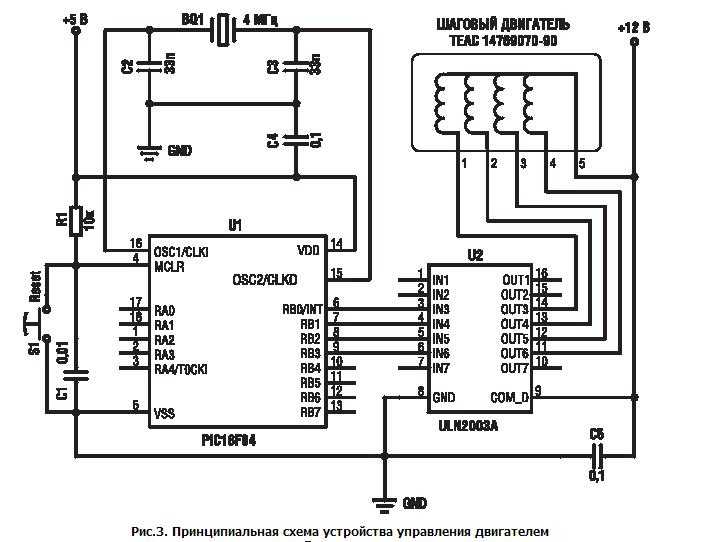 Здесь меняем направление тока в катушках, в первом импульсе (в первом цикле) генератор A + земля A – питается от генератора, а в третьем A – земля A + подается, меняя «полярность» источника питания так, чтобы меняли полярность катушек, например N на S.
Здесь меняем направление тока в катушках, в первом импульсе (в первом цикле) генератор A + земля A – питается от генератора, а в третьем A – земля A + подается, меняя «полярность» источника питания так, чтобы меняли полярность катушек, например N на S.
Фактически, форма сигналов управления транзисторами в H-мосте будет выглядеть как на схеме ниже. Это биполярное однофазное (волновое) управление.
Ход транзисторной последовательности управления в биполярном волновом контроллере
Идея управления катушками двухфазного биполярного двигателя аналогична управлению двухфазным униполярным шаговым мотором. Здесь также нужно управлять каждым транзистором отдельно, как в случае управления биполярной волной. Можем изменить скорость на реле, как при управлении волнами, или использовать логические вентили, меняющие сигналы.
Ход управления катушками в биполярном двигателе двухфазного управления
Эта схема, что касается управления биполярной волной, показывает соответствующий источник питания проводов биполярного шагового двигателя. Низкое состояние означает основное высокое напряжение питания катушки. В первом цикле проводники A – и B – земли A + и B + находятся под напряжением, во втором цикле проводники A – и B + земли A + и B- находятся под напряжением и так далее.
Низкое состояние означает основное высокое напряжение питания катушки. В первом цикле проводники A – и B – земли A + и B + находятся под напряжением, во втором цикле проводники A – и B + земли A + и B- находятся под напряжением и так далее.
Последовательность импульсов управления транзистором будет выглядеть примерно так:
Последовательность управления транзистором в двухфазном биполярном контроллере
Как правило, биполярные шаговые двигатели требуют сложной схемы управления. Эта проблема была решена с появлением специализированных интегральных схем (A3977, A4988, L297), которые используются для генерации соответствующей последовательности импульсов для управления транзисторами в H-мосте.
Также можем использовать логические элементы или D-триггеры для генерации этой последовательности, но чаще существуют драйверы, построенные на микроконтроллерах или специализированных интегральных схемах.
Самым большим преимуществом управления биполярным шаговым двигателем является хорошо используемый крутящий момент, благодаря тому что вся обмотка находится в текущем состоянии после получения импульса (в течение одного цикла).
Двигатели PM (с постоянным магнитом) и HB (гибридные), несмотря на их различную конструкцию, управляются одинаково. Каждый двигатель с 4 контактами может управляться только биполярно, в то время как униполярный шаговый двигатель с 6 контактами может работать как биполярный, так и униполярный.
Двигатели с 8 выводами дают гораздо больше возможностей, они могут работать как однополярные, так и биполярные. Кроме того, шаговый двигатель можно подключить последовательно, где нужно подавать на него более высокое напряжение, но в то же время он будет потреблять меньше тока, что приведет к снижению мощности на более высоких скоростях.
Также можем подключить его параллельно и запитать от более низкого напряжения, но с более высоким током. Это даст меньше потерь мощности на более высоких скоростях. На низких скоростях, как при последовательном, так и при параллельном подключении, двигатель будет иметь одинаковый крутящий момент (мощность).
Схема последовательного и параллельного подключения 8-проводного шагового двигателя
Идея последовательного и параллельного подключения также может быть использована с 6-проводным униполярным двигателем.
Схема последовательного и параллельного подключения 6-проводного шагового двигателя
Следует отметить, что при управлении шаговым двигателем мы переключаем обмотки, имеющие некоторую индуктивность. Когда ток прерывается в индуктивности, генерируется напряжение самоиндукции, которое может быть большим и повредить транзистор. Чтобы исключить это явление, необходимо правильно обеспечить протекание тока в катушке даже после выключения транзистора. Наиболее распространены быстродействующие диоды, которые срезают всплески, возникающие при открытии транзистора. Также можете найти драйверы с конденсаторами вместо диодов.
Схема подключения диодов к униполярному драйверу на биполярных транзисторах
Верхние диоды на схеме отсекают положительные импульсы, образовавшиеся в результате отключения тока от катушек шагового двигателя. С другой стороны, нижние диоды тоже нужны, потому что две обмотки одной пары образуют автотрансформатор. Когда в одной катушке есть положительное перенапряжение, отсекаемое верхним диодом, в другой катушке той же пары происходит отсечение отрицательного перенапряжения нижним диодом.
Иная ситуация с использованием MOSFET-транзисторов, потому что транзистор уже имеет в своей структуре переход сток-исток, который в данном случае действует как диод. При использовании небольших двигателей верхние диоды можно не устанавливать. Положительная энергия вывода не очень велика и может быть поглощена транзистором, который кратковременно работает в разрешенном режиме лавинного пробоя и действует как стабилитрон.
Схема униполярного шагового двигателя с MOSFET транзисторами
Также используем тот же принцип для биполярного управления. При использовании MOSFET-транзисторов можем использовать встроенные «диоды» в транзисторе.
Схема использования диодов в биполярных драйверах
Схема биполярного шагового двигателя с MOSFET транзисторами
Ещё стоит упомянуть инерцию обмоток, ограничивающую скорость нарастания тока. Каждая из катушек шагового двигателя имеет определенную индуктивность L и сопротивление R. После подачи напряжения на катушку ток I определяется напряжением питания катушки (VCC) и ее сопротивлением, то есть I = VCC / R. Он не сразу достигает значения, определяемого L iR. Ток постепенно увеличивается, а постоянная времени нарастания составляет T = L / R. Обычно это 10 мс, поэтому период прямоугольной волны должен составлять 20 мс или 50 Гц, чтобы обеспечить 10 мс высокого состояния длительности импульса для катушки для достижения полного тока.
На низких частотах (скоростях) это значения не имеет, а на более высоких частотах ток не успеет увеличиться до нужного значения. Следовательно, двигатель будет значительно терять крутящий момент при увеличении оборотов, из-за того что ток не успевает увеличиться до номинального тока мотора.
Лучшее решение этой проблемы – подать на двигатель напряжение, намного превышающее номинальное напряжение его работы. Из-за более высокого напряжения ток нарастает быстрее. Правда для этого требуется специальная схема, ограничивающая ток протекающий по обмоткам.
Среди других решений – использование резистора, который выбирается так, чтобы ток в установившемся режиме был равен номинальному току двигателя. Недостатком такой системы являются большие потери мощности на резисторе.
Схема использования резистора для ограничения тока в обмотках шагового двигателя
Иное решение – заменить резисторы на источник тока, который будет поддерживать заданное значение. Сначала на катушку подается высокое напряжение, которое ускоряет нарастание тока, затем источник будет поддерживать заданное значение тока катушки. Правда потери мощности по-прежнему являются большим недостатком, на этот раз на транзисторах, из-за высокого напряжения питания.
Схема использования источника тока для ограничения тока в обмотках шагового двигателя
Другой способ – работать от двух источников питания. В первые моменты импульса катушка питается от более высокого напряжения, которое ускоряет рост тока, затем она переключается на второй источник с номинальным напряжением питания шагового двигателя.
Недостатком такого решения является необходимость использования двух источников, что связано с дополнительными преобразователями. На схеме ниже переключатели используются для иллюстрации идеи переключения источников напряжения.
Упрощенная схема использования двух источников питания для регулирования тока в обмотках шагового двигателя
Самый эффективный метод – чопперский. Он заключается в подаче на катушку двигателя не одиночных импульсов, а серии импульсов по форме напоминающих сигнал ШИМ. В первый момент импульса от генератора прикладывается более высокое напряжение, которое ускоряет нарастание тока, позже оно ограничивается циклической работой транзистора.
Фрагмент схемы биполярного контроллера с технологией чоппера
Форма сигнала прерывателя для управления транзистором
Напоминаем, что в первые моменты управляющего импульса продлеваем включение транзистора, что позволяет быстрее увеличить ток, благодаря гораздо более высокому напряжению VCC, чем номинальное напряжение мотора. В следующие моменты импульса значительно сокращаем время транзистора, он работает циклически и тем самым ограничивает напряжение до номинального рабочего напряжения шагового двигателя. Компаратор, который будет сравнивать напряжения решает, когда сигнал управления транзистора должен быть переключен с постоянного на прерывистый. Благодаря этому есть возможность регулировать ток, подаваемый на катушку шагового двигателя.
Схема использования компаратора в биполярном контроллере
Эта схема очень эффективна и позволяет регулировать ток катушки независимо от напряжения питания, изменяя напряжение Vs.
Напряжение питания катушки VCC намного выше, чем рабочее напряжение обмотки, а это означает что после включения транзистора ток достигает своего рабочего значения намного быстрее, за гораздо более короткое время чем постоянная времени L / R. После достижения порогового значения (установленного Vs) компаратор сравнивает падение напряжения на управляющем резисторе Rs с напряжением Vs. Если ток двигателя и, следовательно, падение напряжения на Rs увеличиваются выше напряжения Vs, компаратор запускает моностабильный триггер, который излучает один импульс и на короткое время отключает напряжение питания катушки, что снижает ток, а затем цикл повторяется с начала.
В результате компаратор и триггер циклически открывают и закрывают транзистор, что предотвращает повышение напряжения катушки до напряжения питания VCC. За счет циклической работы транзистора ограничивается напряжение питания катушки шагового двигателя. Тогда течение имеет пилообразную волну. Ниже представлена диаграмма тока в обмотке прерывателя.
График импульсов тока в обмотке
Этот управляющий сигнал с прерывистой катушкой позволяет увеличить крутящий момент шагового двигателя, особенно при более высоких скоростях вращения. Конечно потребуется еще более интеллектуальная система управления (эта проблема была решена с появлением встроенных драйверов шаговых двигателей и микроконтроллеров), но она позволяет ускорить процесс увеличения тока благодаря подаче гораздо более высокого напряжения на более высокие частоты от генератора, без значительных потерь энергии или использования двух разных источников питания. Тут понадобится только один блок питания с относительно высоким напряжением.
Очень хорошая альтернатива, особенно в тех случаях когда драйвер не нуждается в специальных функциях, – использовать готовые интегральные микросхемы драйверов шаговых двигателей. Многие производители предлагают широкий спектр специализированных чипов, разработанных специально для управления шаговыми двигателями.
Обмотки шаговых двигателей чаще всего управляются формой сигнала ШИМ через H-мосты, по одному на обмотку. Угол поворота пропорционален количеству импульсов, а скорость вращения – их частоте. При работе с полными ступенями довольно много шума и вибрации. К сожалению, также могут быть случаи пропуска ступеней («выход») и, как следствие, потеря контроля над положением ротора. Эта проблема решается за счет использования микрошагов, таким образом питая обмотки так, что ротор проходит через промежуточные положения за один полный шаг.
Если для быстрой остановки двигателя требуется еще несколько шагов, важно правильно определить состояние перехода и остановки.
В этом случае желательно управление с обратной связью в отличие от абсолютного позиционирования с обратной связью, основанного на подсчете шагов. Существует адаптивное управление скоростью шагового двигателя, позволяющее остановить его как можно скорее, несмотря на возможное увеличение нагрузки на этом этапе.
Это возможно на основании наблюдения увеличения BENF и соответствующего увеличения частоты импульсов, питающих двигатель. Вышеописанный алгоритм реализован в интегрированном однокристальном контроллере AMIS-30624. Он настроен для работы с различными типами шаговых двигателей, диапазонами позиционирования и такими параметрами, как скорость, ускорение и замедление.
Схема контроллера AMIS-30624
Он имеет встроенный бессенсорный детектор потери шага, который предотвращает потерю шагов позиционером и быстро останавливает двигатель при его остановке. Это обеспечивает тихую, но точную калибровку во время эталонного прогона и позволяет работать с полузамкнутым контуром. AMIS-30624 включает в себя как аналоговые цепи высокого напряжения, так и цифровые блоки управления. Чип разработан для применений в автомобильной, промышленной и строительной отраслях.
Форум
Схемы управления шаговыми двигателями
-
6-ти выводные шаговые двигатели -
8-ми выводные шаговые двигатели
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным. Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем.
Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
|
Параметр |
Значение |
|---|---|
|
Ток обмотки, А |
Iбиполяр. = 0.707 * Iуниполяр. |
|
Сопротивление обмотки, Ом |
Rбиполяр. = 2 * Rуниполяр. |
|
Индуктивность обмотки, мГн |
Lбиполяр. = Lуниполяр. |
|
Крутящий момент, кг×см |
Tбиполяр. = 1.4 * Tуниполяр. |
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Униполярное подключение шагового двигателя (схема электрическая)
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное последовательное подключение шагового двигателя (схема электрическая)
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
|
Параметр |
Значение |
|---|---|
|
Ток обмотки, А |
Iбиполяр. = 0.707 * Iуниполяр. |
|
Сопротивление обмотки, Ом |
Rбиполяр. = 2 * Rуниполяр. |
|
Индуктивность обмотки, мГн |
Lбиполяр. = Lуниполяр. |
|
Крутящий момент, кг×см |
Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение шагового двигателя (схема электрическая)
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
|
Параметр |
Значение |
|---|---|
|
Ток обмотки, А |
Iбиполяр.= 1.4 * Iуниполяр. |
|
Сопротивление обмотки, Ом |
Rбиполяр.. = 0.5 * Rуниполяр. |
|
Индуктивность обмотки, мГн |
Lбиполяр.. = 4 * Lуниполяр. |
|
Крутящий момент, кг×см |
Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
|
Параметр |
униполярное |
параллельное |
последовательное |
|---|---|---|---|
|
Ток/ фаза, А |
2 |
2. 8 |
1.4 |
|
Сопротивление обмотки, Ом |
1.5 |
0.75 |
3 |
|
Индуктивность обмотки, мГн |
3 |
1.5 |
6 |
|
Крутящий момент, кг×см |
22 кг х см |
31 кг х см |
31 кг х см |
|
Преимущества / недостатки |
Средний момент при среднем энергопотреблении |
Высокий момент при высоком потреблении тока |
Высокий момент на низких скоростях при низком энергопотреблении |
|
Максимальная эффективность |
средний скоростной диапазон |
высокоскоростной диапазон |
низкоскоростной диапазон |
Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения
Теория управления шаговыми двигателями
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики
обратной
связи по углу или положению выходного вала исполнительного двигателя
Система отработки угла выходного вала двигателя с использованием датчика обратной связи.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без
датчика
обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость
использования в ней
цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в
фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков
обратной
связи.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных
или
двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол
соответствует
числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного
коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами),
реактивного типа и
индукторные.
Шаговые синхронные двигатели активного типа. В отличие от синхронных машин непрерывного вращения шаговые
двигатели
имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.
Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
купить блок управления шаговым двигателем
купить шаговый двигатель
Принципиальная схема управления шаговым двигателем
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления
Симметричная система коммутации
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных
обмоток
управления
Несимметричная система коммутации
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов
больше 1,
выполненный в виде «звездочки» .
Число тактов КТ системы управления называют количеством состояний коммутатора на периоде его работы T. Как
видно из
рисунков для симметричной системы управления КТ =4, а для несимметричной КТ =8.
В общем случае число тактов КТ зависит от числа обмоток управления (фаз статора) mу и может быть посчитано
по
формуле:
KT=myn1n1,
где n1=1 при симметричной системе коммутации;
n1=2 при несимметричной системе коммутации;
n2=1 при однополярной коммутации;
n2=2 при двуполярной коммутации.
Схемы, иллюстрирующие положения ротора шагового двигателя с постоянными магнитами при
подключении к
источнику питания одной (а) и двух обмоток (б)
При однополярной коммутации ток в обмотках управления протекает в одном направлении; при двуполярной — в
обеих.
Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с
дискретно
вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в
пространстве
машины, при котором оси потоков ротора и статора совпадают.
Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели
являются
многополюсными (р>1).
Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль
окружности 2р
постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар
полюсов
связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р= 4…6. Обычно величина
шага ротора
активных шаговых двигателей составляет десятки градусов.
Реактивные шаговые двигатели. У активных шаговых двигателей есть один существенный недостаток: у них
крупный шаг,
который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить
шаговые
двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах
статора
Принцип действия реактивного редукторного шагового двигателя: (а) — исходное положение
устойчивого
равновесия; (б) — положение устойчивого равновесия. cдвинутое на один шаг
Если зубцы ротора соосны с одной диаметрально расположенной парой полюсов статора, то они сдвинуты
относительно
каждой из оставшихся трех пар полюсов статора соответственно на ј, Ѕ и ѕ зубцового деления.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
В выражении для КТ величину n2 следует брать равной 1, т. к. изменение направления поля не влияет на
положение
ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного
синхронного
двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при
обесточенных
обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь
применением двух,
трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть
зубцового
деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то
же время
роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью
совпадают.
Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного
коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя
(большой
удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового
двигателя
(малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом
фаз,
размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях
индукторных шаговых
двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора
и
постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового
индукторного
двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный
магнит,
расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в
заданном
положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине
шага
больше синхронизирующий момент, лучшие энергетические и динамические характеристики.
Линейные шаговые синхронные двигатели. При автоматизации производственных процессов весьма часто необходимо
перемещать
объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится
применять
преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это
позволяет
упростить кинематическую схему различных электроприводов
Схема, иллюстрирующая работу линейного шагового двигателя
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание
магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного
магнитопровода ротора
сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно
зубцовых
делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку
подмагничивания не
зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового
двигателя.
Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока
подмагничивания
создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов
данного
магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
где
KТ — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые
двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами
магнитного
притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу
отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор
подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное
сопротивление движению
ротора и высокая точность позиционирования.
Режимы работы синхронного шагового двигателя. Шаговый двигатель работает устойчиво, если в процессе
отработки угла при
подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в
процессе
отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору
результирующей
магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового
двигателя,
при котором шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это
значит, что в
начале каждого шага угловая скорость вращения двигателя равна 0
Процесс отработки шагов шаговым двигателем
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания
обусловлены
запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая
энергия
преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь,
тем быстрее
заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение
между
числом шагов ротора и потока статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и
приемистость.
Предельная механическая характеристика- это зависимость максимального синхронизирующего момента от частоты
управляющих
импульсов
Предельная механическая характеристика шагового двигателя
Приемистость- это наибольшая частота управляющих импульсов, при которой не происходит потери или
добавления шага при
их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с
увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно
перемещаемых) частей и статического момента сопротивления
Предельная динамическая характеристика шагового двигателя
Приемлемость падает с увеличением нагрузки.
Продолжение статьи (на англ. языке)
Система управления шаговым двигателем ZETLAB
В современном мире всё большую роль играет автоматизация процессов. Для этого необходимо преобразовывать сигналы управления в механические движения. Одним из способов достижения данной цели является использование шаговых двигателей.
Шаговый двигатель — это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Преимущества применения шаговых двигателей
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
- если обмотки запитаны, то двигатель в режиме остановки обеспечивает полный момент;
- хорошие шаговые двигатели обеспечивают точность 3-5% от величины шага, при этом ошибка не накапливается от шага к шагу;
- возможность быстрого старта/остановки/реверсирования;
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников;
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи;
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора;
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Недостатки применения шаговых двигателей
- шаговым двигателем присуще явление резонанса;
- из-за работы без обратной связи возможна потеря контроля положения, поэтому рекомендуется дополнять системы управления шаговым двигателем энкодером;
- потребление энергии не уменьшается даже без нагрузки;
- затруднена работа на высоких скоростях;
- невысокая удельная мощность;
- относительно сложная схема управления.
Применение шаговых двигателей:
- приводы осей координатных столов и манипуляторов;
- системы линейного перемещения;
- упаковочные и конвейерное оборудование;
- оборудование для текстильного и пищевого производств;
- полиграфическое оборудование;
- устройство подачи, дозирования;
- сварочные автоматы.
Принцип работы шагового двигателя
Основной принцип работы шагового двигателя заключается в следующем — двухполюсный ротор электродвигателя, сделанный из специальной магнитомягкой стали, располагается в четырехполюсном статоре. Первая полюсная пара сделана из магнитов (постоянных), на второй паре имеется обмотка управления шаговым электродвигателем. В то время, когда ток в обмотках управления отсутствует, ротор двигателя располагается вдоль магнитов и стабильно удерживается с некоторым усилием (зависящее от силы магнитного потока).
Как только осуществляется подача напряжения (постоянного) на обмотку управления шаговым электродвигателем, появляется магнитный поток, что больший магнитного потока имеющихся постоянных магнитов. Под воздействием усилия (электромагнитного) ротор начинает менять угол, стараясь войти в положение соосное с полюсами обмотки управления. Последующий импульс управления полностью отключает электрическое напряжение с обмотки управления. Вследствие этого ротор движка движется под воздействием магнитного потока магнитов.
В данной работе описывается алгоритм управления шаговыми двигателями двухфазного (биполярного) и четырёхфазного (униполярного) типа с помощью модуля управления шаговым двигателем с интерфейсом CAN ZET 7160-S StepMotor-CAN или интерфейсом RS-485 ZET 7060-S StepMotor-485.
Биполярный (двухфазный) шаговый двигатель
Двухфазный шаговый двигатель (биполярный шаговый двигатель) имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
| Рис. 1 Внутренняя схема биполярного Ш.Д. | Рис. 2 Схема выводов биполярного Ш.Д. | Рис. 3 Схема подключения биполярного Ш.Д. к ZET7X60-S |
Униполярный (четырёхфазный) шаговый двигатель
Четырёхфазный шаговый двигатель (униполярный шаговый двигатель) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов.
| Рис. 4 Внутренняя схема униполярного Ш.Д. | Рис. 5 Схема выводов униполярного Ш.Д. | Рис. 6 Схема подключения униполярного Ш.Д. к ZET7X60-S |
Режимы работы шагового двигателя
Существует несколько способов управления фазами шагового двигателя. Наиболее распространёнными из них являются полношаговый и полушаговый режим. Существуют также режимы управления с 1/4, 1/8, 1/16 шага. Но эти режимы нужны только для узкого круга задач, и они требуют значительного усложнения схемы микроконтроллера и алгоритма управления. Ниже приводится последовательность генерируемых импульсов для различных режимов работы шагового двигателя, на примере униполярного двигателя.
Рис. 7 Полношаговый режим, с 1-ой активной обмоткой на каждом шаге
Рис. 8 Полношаговый режим, с 2-мя активными обмотками на каждом шаге
Рис. 9 Полушаговый режим
Разгон и торможение шагового двигателя
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 10а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 10б).
Рис. 10 Зависимость тока в обмотках Ш.Д. от частоты
Таким образом, для работы с шаговым двигателем на большой скорости необходимо выполнять его разгон и замедление, в противном случае произойдёт потеря синхронности между шаговым двигателем и контроллером, и положение ротора шагового двигателя будет утеряно.
Управление шаговым двигателем с помощью модуля ZET7X60-S StepMotor
Перед началом работы с шаговым двигателем необходимо выставить необходимые параметеры на вкладке «Настройки»:
- Частота опроса — частота, с которой будет обновляться информация в канале о количестве проделанных шагов;
- Тип двигателя — тип двигателя, подключенного к модулю ZET 7X60-S StepMotor.
После этого с помощью вкладки «Управление» можно начинать управление шаговым двигателем.
- Старт/Стоп — начать /остановить движение шагового двигателя;
- Направление вращения — задаём направление вращения шагового двигателя, по или против часовой стрелки;
- Кол-во шагов до остановки — количество шагов, которое проделает шаговый двигатель после запуска;
- Время одного шага — скорость вращения шагового двигателя.
| Рис. 11 Вкладка «Настройки» в программе MODBUS-ZETLAB | Рис. 12 Вкладка «Управление» в программе MODBUS-ZETLAB |
Во время выполнения команды, контроллер сообщает о количестве проделанных шагов на данный момент с частотой заданной в настройках (Настройки —> Частота опроса).
Рис. 13 Отображение количества проделанных шагов в программе ZETLAB «Многоканальный осциллограф»
Система управления шаговым двигателем с обратной связью
Система управления шаговым двигателем с обратной связью строится на базе модуля управления шаговым двигателем ZET 7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) и интеллектуального энкодера ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Для подключения к системе ZETLAB используется преобразователь интерфейса ZET 7070. Управление шаговым двигателем осуществляется подачей сигналов с модуля ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN). Контроль состоянием шагового двигателя осуществляется энкодером, сигнал с которого обрабатывается модулем ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Обработка сигналов с интеллектуального энкодера и программное управление модулем ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) осуществляется с помощью программного обеспечения ZETLAB.
Схема системы управления шаговым двигателем с обратной связью
Состав системы управления шаговым двигателем с обратной связью
| Описание |
| Управляющий модуль ZET 7060-S StepMotor-485 или ZET 7160-S StepMotor-CAN Цифровой модуль управления шаговым двигателем с интерфейсом RS-485 или CAN. |
| Датчик углового перемещения Преобразование углового перемещения в последовательность электрических сигналов, содержащих информацию о величине и направлении этого перемещения. Диаметр корпуса 50 мм. Разрешающая способность до 320000 дискрет на оборот. |
| Измерительный модуль ZET 7060-E Encoder-485 или ZET 7160-E Encoder-CAN Преобразование сигнала с датчика в значения углового перемещения и передача этих данных по протоколу Modbus по интерфейсу RS-485 или CAN 2.0. |
| ZET 7070 RS-485↔USB или ZET 7174 CAN-USB Модуль передачи данных с измерительных модулей на ПК |
| MODBUS OPC Сервер Программа «Сервер данных интеллектуальных датчиков» |
| Кабели для подключения измерительных и управляющих модулей к ZET 7070 или ZET 7174 |
| Программное обеспечение ZETLAB Программы для отображения результатов измерений интеллектуальных датчиков в численном и графическом виде на плоскости и в объеме. |
| SCADA ZETVIEW Графическая среда разработки приложений для автоматизации измерений |
УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Originally posted 2018-11-23 11:47:42. Republished by Blog Post Promoter
Управляй любым электродвигателем Драйвера для шаговых моторов своими руками
В ассортименте полупроводниковых компонентов производства компании Texas Instruments
широко представлены микросхемы драйверов для управления всеми типами электродвигателей
, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных
, бесколлекторных
и шаговых двигателей
с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов. Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах.
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Типы электродвигателей, способы управления и возникающие сложности
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.
Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.
Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.
Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Бесколлекторные двигатели
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4). Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем.
Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).
Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.
Преимущества двигателей BLDC:
- высокая эффективность;
- отсутствие щеток, обеспечивающее повышенную надежность, снижение затраты на обслуживание;
- линейность тока/крутящего момента;
- упрощенный отвод тепла.
Особенности применения двигателей BLDC:
- более сложная система управления с обратной связью по положению ротора;
- пульсации крутящего момента.
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.
Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).
Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.
Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.
Достоинства шаговых двигателей:
- невысокая стоимость благодаря отсутствию схем контроля скорости вращения и позиционирования;
- высокая точность позиционирования;
- широкий диапазон скоростей вращения;
- простой интерфейс управления с цифровыми контроллерами;
- очень высокая надежность;
- хороший удерживающий момент.
Особенности применения шаговых двигателей:
- ШД присуще явление резонанса;
- из-за отсутствия обратной связи возможна потеря контроля положения;
- потребление энергии не уменьшается даже при работе без нагрузки;
- затруднена работа на очень высоких скоростях;
- невысокая удельная мощность;
- достаточно сложная схема управления.
Традиционные решения для управления электродвигателями
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.
Так, у интегрированного драйвера TI максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера этот показатель не превышает 37°С.
Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).
Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста. На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
Решения для управления электродвигателями от TI
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.
TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).
Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы ,
и . Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Драйверы TI для BDC
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов , ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.
Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера для управления одним коллекторным двигателем.
Драйверы TI для BLDC
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом. Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.
Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.
Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Драйвер шагового двигателя на транзисторах
Представляю Вашему вниманию драйвер биполярного шагового двигателя на биполярных транзисторах серии «КТ».
Драйвер работает по принципу эмиттерного повторителя. Сигнал управления поступает на каскад усиления собранного на транзисторе кт315. После чего попадет на Н мост из комплементарной пары КТ815 и КТ 814.
Каскад усиления необходим, так как мощности тока на выходе из микроконтроллера недостаточно для открытия силовых транзисторов. После силовых транзисторов установлены диоды гашения самоиндукции мотора.
Так же в схеме предусмотрено гашение помех в виде конденсаторов на 3 на 0,1 мкф и 1 на 100 мкф. Так как драйвер проектировался для работы с двигателем от CD привода на 150 ватт, охлаждение на транзисторах не
Шаговый двигатель из CD привода подключенный к драйверу на транзисторах
устанавливалось, но максимальный ток эмиттера транзисторов КТ814 и КТ815 составляет 1,5 а, благодаря чему данным драйвером можно крутить моторы и по мощнее. Для этого всего необходимо установить пластины охлаждения на силовые транзисторы.
— хотя биполярные шаговые двигатели относительно дороги, для своих физических размеров они обеспечивают высокий вращающий момент. Однако для двух обмоток мотора требуется восемь управляющих транзисторов, соединенных в четыре Н-моста. Каждый транзистор должен выдерживать перегрузки и короткие замыкания и быстро восстанавливать работоспособность. А драйверу, соответственно, требуются сложные схемы защиты с большим количеством пассивных компонентов.
Рисунок 1
Рисунок 1. Одна микросхема в корпусе для поверхностного монтажа и несколько пассивных компонентов могут управлять биполярным шаговым двигателем.
Управление биполярным шаговым двигателем
Драйвер шагового двигателя своими руками
— на Рисунке 1 показана альтернативная схема драйвера двигателя, основанная на аудио усилителе класса D компании Maxim. Микросхема МАХ9715 в миниатюрном корпусе для поверхностного монтажа может отдавать мощность до 2.8 Вт в типичную нагрузку 4 или 8 Ом. Каждый из двух выходов микросхемы образован Н-мостами из мощных MOSFET, управляющими парами линий OUTR+, OUTR- и OUTL+, OUTL-, которые подключаются к обмоткам А и В шагового двигателя, соответственно. Каждая пара формирует дифференциальный широтно-модулированный импульсный сигнал с номинальной частотой переключения 1.22 МГц. Малый уровень помех, создаваемых схемой, исключает необходимость в выходных фильтрах.
Конденсаторы развязки
Конденсаторы С1, С3, С4 и С6 служат развязкой для входов питания и смещения, а С5 и С7 выполняют накопительные функции для мощных выходных усилителей класса D. Конденсаторы С8 и С9 ограничивают полосу пропускания усилителя до 16 Гц, а ферритовые бусины L2 и L3 ослабляют электрические помехи, наводимые на длинные кабели. П-образный фильтр C1, C2, L1 подавляет помехи на входе питания микросхемы IС1. Входные сигналы микросхемы Шаг_А и Шаг_В, управляющие, соответственно, правым и левым каналами двигателя, могут формироваться любым подходящим контроллером. Внутренние цепи защищают усилитель от коротких замыканий и перегрева в случае неисправности шагового двигателя или неправильного подключения его выводов.
Таблица 1
Иллюстрация последовательности импульсов
Таблица 1 иллюстрирует последовательность импульсов Шаг_А и Шаг_В, управляющих вращением типичного шагового двигателя в одном направлении путем непрерывной подачи комбинаций сигналов от 0 до 4. Шаг 4 возвращает вал двигателя в исходное положение, завершая оборот в 360°. Чтобы изменить направление вращения мотора, начинайте формировать временную диаграмму импульсов снизу таблицы и последовательно двигайтесь по ней вверх. Подав напряжение низкого логического уровня на вход SHDN микросхемы (вывод 8), можно отключить оба канала усилителя. Формы сигналов на входах и выходах схемы представлены на Рисунке 2.
Краткое введение в теорию и типы драйверов, советы по подбору оптимального драйвера для шагового двигателя.
Если вы хотите
купить драйвер шагового двигателя
, нажмите на информер справа
Некоторые сведения, которые могут помочь вам выбрать драйвер шагового двигателя
.
Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя.
Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach4 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
2) Двухуровневые драйверы
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
3) Драйверы с ШИМ.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Как выбрать драйвер шагового двигателя (ШД)
Первый параметр
, на который стоит обратить внимание, когда вы решили выбрать драйвер шагового двигателя – это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но стоит драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя. Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15-40% больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель, с другой – не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Второй момент
– это напряжение питания. Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно – напряжение питания влияет на динамику(момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8-10. Если максимальное указанное напряжение питания драйвера резко отличается от данных величин – стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя — тем большее напряжение требуется для драйвера. Существует эмпирическая формула U = 32 * sqrt(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера: U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы EM706, AM882, YKC2608M-H.
Третий аспект
– наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер – устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Четвертый аспект
– наличие механизмов подавления резонанса. Резонанс шагового двигателя – явление, которое проявляется всегда, разница только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и – встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга – такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Пятый аспект
– протокольная часть. Надо убедиться, что драйвер работает по нужному вам протоколу, а уровни входных сигналов совместимы с требуемыми Вам логическими уровнями. Эта проверка идет пятым пунктом, потому что за редким исключением подавляющее число драйверов работает по протоколу STEP/DIR/ENABLE и совместимо с уровнем сигналов 0..5 В, вам надо только лишь на всякий случай убедиться.
Шестой аспект
– наличие защитных функций. Среди них защита от превышения питающего напряжения, тока обмоток(в т.ч. от короткого замыкания обмоток), от переполюсовки питающего напряжения, от неправильного подключения фаз шагового мотора. Чем больше таких функций — тем лучше.
Седьмой аспект
– наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако, из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако, практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, при прочих равных условиях стоит использовать деление чем больше, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов – так, для драйвера со входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Восьмой аспект
– наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т.п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Девятый, и самый важный аспект
– качество драйвера. Оно практически не связано с характеристиками и т.п. На рынке существует множество предложений, и иногда характеристики драйверов двух производителей совпадают практически до запятой, а установив их по очереди на станок, становится ясно, что один из производителей явно занимается не своим делом, и в производстве недорогих утюгов ему больше повезет. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом — ориентироваться на бренды.
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д.
Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т. д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5″ дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер.
В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т. е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
Если присмотреться к этой диаграмме (слева), то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:
Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, чтобы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
Схема
:
Готовый девайс
:
Программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Собственно говоря, можно прикрутить сюда и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
Схема драйвера шагового двигателя
Краткое описание
Введение
Драйвер шагового двигателя представляет собой схему или устройство, которое обеспечивает необходимый ток и напряжение для шагового двигателя, чтобы он работал плавно. Шаговый двигатель — это тип двигателя постоянного тока, который вращается ступенчато.
[adsense1]
Основное различие между простым двигателем постоянного тока и шаговым двигателем заключается в том, что с помощью шагового двигателя мы можем добиться точного позиционирования с помощью цифрового управления.
Шаговый двигатель вращается точно за счет синхронизации импульсных сигналов от контроллера, которые подаются через драйвер. Драйвер шагового двигателя — это схема, которая принимает импульсные сигналы от контроллера и преобразует их в движение шагового двигателя.
В этом проекте мы разработали простую схему драйвера шагового двигателя на 12 В, используя микросхему таймера 555 (действующую как контроллер), счетчик декад CD4017 (действующий как драйвер) вместе с несколькими другими компонентами.
[адсенс2]
Принципиальная схема
Необходимые компоненты
- 555 Таймер IC
- CD4017 Счетчик декад Джонсона (10 декодированных выходов)
- 4 транзистора 2N2222 NPN
- 4 соединительных диода 1N4007 PN
- Резисторы 4 x 1 кОм (1/4 Вт)
- Резистор 2,2 кОм (1/4 Вт)
- Резистор 470 Ом (1/4 Вт)
- Потенциометр 100 кОм (ручка)
- Керамический дисковый конденсатор 100 пФ (код — 101) (также читается как 0,1 нФ)
- 1 мкФ, 16 В, поляризованный конденсатор
- Шаговый двигатель 12 В (униполярный, 5 проводов)
- Соединительные провода
- Макетная плата (макетная плата)
- Блок питания 12 В
Компонент Описание
555 ИС таймера
IC 555 — очень известная ИС таймера, которая часто используется для временных задержек, генерации импульсов и многих приложений генератора. IC 555 имеет три режима работы, а именно нестабильный мультивибратор (генератор импульсов), моностабильный мультивибратор (временные задержки) и бистабильный мультивибратор (флип-флоп). В этом проекте мы использовали эту микросхему 555 для генерации импульса, т.е. в нестабильном режиме работы.
CD4017 ИС счетчика декад
CD4017 представляет собой ИС счетчика, которая производит 10 декодированных выходов и, следовательно, счетчик декад. Эти счетчики часто используются в дисплеях, операциях деления частоты, двоичных счетчиках и т. д.
Но в этом проекте мы используем микросхему счетчика CD4017 в качестве драйвера шагового двигателя. И, следовательно, эта схема драйвера шагового двигателя по сути является схемой двоичного счетчика.
Шаговый двигатель
В этом проекте используется шаговый двигатель 12 В. Это шаговый двигатель униполярного типа с 5-проводной конфигурацией. В основном, шаговые двигатели классифицируются на униполярные шаговые двигатели и биполярные шаговые двигатели, основанные на обмотках статора. На следующем изображении показан биполярный шаговый двигатель с его обмоткой.
Схема драйвера для униполярного шагового двигателя может быть построена с помощью нескольких транзисторов или микросхемы на транзисторе Дарлингтона, такой как ULN2003.
Но для схемы драйвера биполярного шагового двигателя требуется соединение по типу Н-мост. Следовательно, мы используем микросхемы H-моста, такие как L293D, для управления биполярными шаговыми двигателями.
Схема
Мы начнем с генератора прямоугольных импульсов, т.е. 555 IC в нестабильном режиме. Резистор 2,2 кОм подключен между VCC и выводом разрядки 555 (вывод 7).
Потенциометр на 100 кОм подключается между выводом разрядки (вывод 7) и выводом порога (вывод 6), который, в свою очередь, замыкается на контакт триггера (вывод 2).
Конденсатор емкостью 1 мкФ подключается между выводом триггера (вывод 2) и заземлением. Байпасный конденсатор емкостью 100 пФ подключен к выводу управляющего напряжения (вывод 5). Другие контакты, то есть VCC (контакт 8), подключены к источнику питания 12 В, контакт сброса (контакт 4) к источнику питания 12 В, а контакт заземления (контакт 1) к GND.
Выход микросхемы таймера 555, т. е. контакт 3, используется как тактовый вход для микросхемы счетчика CD4017, т. е. ее 14-го контакта. Контакты VDD и VSS CD4017, то есть контакты 16 и 8, подключены к источнику питания 12 В и заземлению соответственно. Контакт включения (контакт 13) подключен к земле.
Нам нужно контролировать 4 клеммы двух катушек шагового двигателя. Следовательно, нам нужно всего 4 выхода от драйвера. Эти выходы от Q0 до Q3, т.е. контакты 3, 2, 4 и 7 соответственно. Выходы счетчика подключены к базовым выводам 4-х транзисторов через отдельные резисторы 1 кОм.
Счетчик должен сбрасываться при пятом импульсе, и, следовательно, Q4 (вывод 10), который ни что иное, как пятый выход, подключен к выводу сброса CD4017, т.е. к выводу 15, и этот вывод подключен к GND через резистор 470 Ом.
Шаговый двигатель униполярного типа с 5-проводной конфигурацией. Центральный контакт закорочен внутри и подключен к источнику питания (здесь 12 В).
Остальные 4 вывода шагового двигателя являются концами двух катушек. Они должны быть подключены к выводам коллектора четырех транзисторов.
Важно, чтобы они были подключены в порядке срабатывания выходов. Наконец, четыре диода подключены между клеммами коллектора и питания. Диоды очень важны, так как они защищают транзисторы от индуктивных выбросов.
Работа схемы драйвера шагового двигателя
Работа этой схемы драйвера шагового двигателя очень проста. Мы увидим пошаговое рабочее объяснение. Во-первых, микросхема таймера 555 сконфигурирована как нестабильный мультивибратор, т. е. действует как генератор прямоугольных импульсов.
В зависимости от положения потенциометра частота прямоугольной волны будет варьироваться от 7 Гц до 340 Гц.
Этот прямоугольный импульс подается на микросхему счетчика CD4017 в качестве входного сигнала тактового сигнала. Для каждого положительного перехода тактового сигнала, т. е. перехода с низкого уровня на высокий, выход счетчика увеличивается на один счет.
Для первого положительного перехода на тактовой частоте Q0 будет высоким, для второго положительного перехода Q1 будет высоким и так далее.
Поскольку нам нужно только 4 выхода, пятый выход, т.е. Q4, подключается к контакту Reset, так что счетчик сбрасывается и счет начинается снова.
Выходы микросхемы счетчика CD4017 подключены к 4 различным транзисторам, которые, в свою очередь, подключены к 4 выводам катушки шагового двигателя. Мы можем лучше понять это из следующей диаграммы.
Предположим, что точки A, B, C и D являются контактами катушек, подключенных к транзисторам. Общий провод в шаговом двигателе подается на питание 12В.
Когда на CD4017 подается первый тактовый сигнал, Q0 становится ВЫСОКИМ. Это включит соответствующий транзистор.
В результате питание от общего провода идет через точку А на землю. Это возбуждает катушку и действует как электромагнит. Ротор притянется и повернется в это положение.
Во время второго тактового импульса выход Q1 становится ВЫСОКИМ, и в результате связанный с ним транзистор включается. Теперь ток течет от общего провода к GND через точку B.
Следовательно, эта катушка будет под напряжением и превратится в электромагнит. Это приведет к дальнейшему вращению ротора. Этот процесс продолжается и в зависимости от частоты тактового сигнала изменяется скорость вращения шагового двигателя.
Преимущества
- Самодельный драйвер шагового двигателя предназначен для управления униполярными шаговыми двигателями.
- Используя этот драйвер шагового двигателя, мы можем избежать дорогостоящих специализированных плат драйвера шагового двигателя.
Недостатки
- Эта конструкция неэффективна.
- Требуется много сложной проводки для небольшого приложения.
Видео конструкции и вывода0003
Содержание
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя (или привод шагового двигателя ) представляет собой схему, используемую для управления шаговым двигателем. Драйвер шагового двигателя обычно состоит из контроллера, драйвера и соединений шагового двигателя.
Сегодня на рынке доступно множество схем драйверов.
Со временем их стало проще и проще подключать к шаговому двигателю.
Вы можете почти мгновенно запустить двигатель, как только подключите к нему цепи драйвера.
Эти цепи имеют номинальные значения тока и напряжения, поэтому важно выбрать правильную схему драйвера в соответствии с номиналами двигателя.
Основные компоненты привода шагового двигателя
- Контроллер (обычно микроконтроллер или микропроцессор)
- ИС драйвера для управления током двигателя
- Блок питания
Контроллер шагового двигателя
Выбор контроллера — это первый шаг к созданию драйвера. Он должен иметь как минимум 4 выходных контакта для шагового двигателя. Кроме того, он должен содержать таймеры, АЦП, последовательный порт и т. д. в зависимости от приложения, в котором будет использоваться драйвер.
Драйвер шагового двигателя
В настоящее время люди переходят от дискретных компонентов драйвера, таких как транзисторы, к более компактным интегральным микросхемам.
Эти микросхемы драйверов доступны по разумной цене и их легче реализовать при сборке, что сокращает общее время проектирования схемы.
Драйверы должны быть выбраны в соответствии с номиналами двигателя по току и напряжению. Драйверы серии ULN2003 наиболее популярны в приложениях, отличных от H Bridge, и подходят для привода шагового двигателя .
Каждая пара Дарлингтона внутри ULN может обрабатывать до 500 мА, а максимальное напряжение может достигать 50 В постоянного тока.
Блок питания для привода шагового двигателя
Шаговый двигатель может работать при напряжении от 5 до 12 В, и, аналогично, потребляемый ток будет в диапазоне от 100 мА до 400 мА.
Поставщик предоставит технические характеристики двигателя. Соответственно, мы должны спроектировать поставку. Мощность должна регулироваться таким образом, чтобы можно было избежать колебаний скорости и крутящего момента.
Блок питания
Поскольку регулятор напряжения 7812 может работать только с током до 1 А, здесь используется внешний транзистор. Выдерживает ток 5 А. В зависимости от общего потребляемого тока должен быть обеспечен надлежащий радиатор.
На приведенной выше блок-схеме показана последовательность соединений и взаимосвязь между различными компонентами платы драйвера.
Прочие компоненты
- Переключатели, потенциометры
- Радиатор
- Соединительные провода
Комплексный привод шагового двигателя
Привод шагового двигателя — это тупая часть, которая подает сигналы микроконтроллеру электроники, если вы не запрограммируете его правильно. через драйвер.
Шаговый двигатель может работать во многих режимах, таких как полношаговый, волновой или полушаговый (см. последовательность шагов в статье о шаговом двигателе).
Следовательно, мы должны сделать драйвер достаточно интерактивным, чтобы он мог принимать команды от пользователя и выполнять необходимые действия. Также мы должны контролировать скорость вращения. Команда пуска/останова должна запускать или останавливать вращение двигателя.
Для выполнения вышеуказанных функций нам необходимо использовать дополнительные выводы на микроконтроллере. Два контакта необходимы для выбора типа шага и для запуска или остановки двигателя.
Один контакт требуется для подключения потенциометра, который будет действовать как регулятор скорости. АЦП внутри микроконтроллера будет использоваться для управления скоростью вращения.
Алгоритм программы
- Инициализировать контакты порта в режимах ввода/вывода.
- Инициализировать модуль АЦП.
- Создайте отдельные функции для полушага, полного шага, волнового привода и задержки.
- Проверьте два контакта порта на рабочий режим (00-стоп, 01-волновой привод, 10-полный шаг, 11-полушаг).
- Перейти к соответствующей функции.
- Считайте значение потенциометра через АЦП и соответственно установите значение задержки.
- Завершить один цикл последовательности.
- Перейдите к шагу 4.
Плата драйвера
Если вы планируете изготовить собственную плату с помощью программного обеспечения САПР, такого как EAGLE, убедитесь, что вы обеспечиваете достаточную толщину для прохождения тока двигателя без перегрева платы.
Кроме того, поскольку двигатели являются индуктивными компонентами, необходимо соблюдать осторожность, чтобы не мешать другим путям прохождения сигнала из-за помех. Должны быть выполнены надлежащие проверки ERC и DRC.
Примечание:
Сборка драйвера шагового двигателя больше касается выбора правильного блока питания и драйвера, а выбор микроконтроллера вторичен.
Многие микроконтроллеры могут выполнять простую работу по вращению двигателя. Тем не менее, конструктивные соображения относительно напряжений и токов, на которые вы должны обратить внимание при разработке драйвера.
Кроме того, одна плата драйвера должна обрабатывать напряжения и токи в широком диапазоне, а не только для одного двигателя. Это позволит вам использовать одну и ту же плату во многих разных проектах, а не создавать каждый раз новую.
Хотите учиться быстрее? 🎓
Каждую неделю получайте электротехнические товары на свой почтовый ящик.
Кредитная карта не требуется — это абсолютно бесплатно.
О Electrical4U
Electrical4U посвящен обучению и распространению всего, что связано с электротехникой и электроникой.
…
Как управлять шаговыми двигателями для точных движений роботов
Во многих технологиях, которые движут современным миром, шаговые двигатели активно работают. Эти относительно простые, но высокоэффективные двигатели являются отличным выбором для многих различных применений, включая производственные приложения, в которых используются роботизированные компоненты.
Шаговые двигатели, однако, требуют систем управления, которые могут обеспечить степень точного оперативного контроля, которая создает точные и точные роботизированные движения. И когда инженер проектирует эти системы управления, ему необходимо уделять особое внимание конструкции контроллера и электрической коробки, используемой для его размещения.
В сегодняшнем выпуске блога Polycase TechTalk мы углубимся в основы шагового двигателя и его применения. Затем мы поговорим о том, как управлять шаговыми двигателями для инженеров-механиков и электриков, проектирующих и определяющих системы управления двигателями.
Частично разобранный шаговый двигатель. Обратите внимание на магнитные катушки, окружающие зубчатый ротор.
Что такое шаговый двигатель?
Шаговый двигатель — это распространенный тип бесщеточного двигателя с питанием от постоянного тока. Чтобы понять, как работают шаговые двигатели и почему мы их используем, вы должны сначала понять несколько вещей о том, как работают электрические двигатели.
Основным назначением электродвигателя является преобразование электрической энергии в механическую. Для этого в электродвигателе используются различные типы магнитов, которые взаимодействуют друг с другом и заставляют физические компоненты двигателя двигаться. Движение компонентов вращает вал двигателя, который передает механическую энергию от двигателя для питания других частей системы.
Существует два широко используемых типа электродвигателей: коллекторные и бесщеточные. В каждом из них используется свой метод преобразования электрической энергии в механическую:
- Коллекторный двигатель использует электрические контакты, называемые щетками, которые передают ток на якорь, намотанный металлическими катушками. Два постоянных магнита статора, один положительный и один отрицательный, окружают якорь и заставляют якорь, находящийся под напряжением, вращаться. Когда якорь вращается, его кинетическая энергия вращает вал двигателя.
- В бесщеточном двигателе используется несколько электромагнитов статора, расположенных по кольцу вокруг намагниченного ротора. Электромагниты можно активировать и деактивировать последовательно, чтобы управлять вращением ротора и точно совмещать его с каждым магнитом. Здесь вращение ротора создает кинетическую энергию, вращающую вал двигателя.
Коллекторные двигатели по-прежнему используются в различных устройствах, например, в бытовой технике. Однако бесщеточные двигатели вытеснили щеточные во многих других областях, в том числе во многих цифровых технологиях, которые управляют нашим миром.
Таким образом, важно понимать, как управлять шаговыми двигателями и как создавать системы управления, которые управляют ими безопасно и эффективно. Прежде чем мы углубимся в то, как они работают, давайте лучше поймем, как используются шаговые двигатели, рассмотрев преимущества, которые могут предложить шаговые двигатели, и приложения, в которых они обычно используются.
конструкция шагового двигателя. Каждая из катушек активируется последовательно, чтобы обеспечить постоянное и предсказуемое движение ротора.
Преимущества шаговых двигателей
Итак, почему шаговые двигатели часто выбирают для робототехники? Вот некоторые из основных преимуществ шаговых двигателей, благодаря которым они идеально подходят для робототехники:
- Чрезвычайно точное управление движением и позиционированием двигателя
- Значительно более низкие требования к техническому обслуживанию по сравнению с коллекторными двигателями
- Высокоэффективная и надежная работа при номинальных скоростях и нагрузках
- Значительно меньшая занимаемая площадь, чем у большинства коллекторных двигателей
- Генерирует гораздо меньше тепла и электрических шумов, чем коллекторные двигатели.
Униполярные шаговые двигатели, которые одновременно питают только одну сторону кольца катушки статора, также относительно недороги, что делает их популярными как среди любителей электроники, так и среди профессионалов. Биполярные шаговые двигатели, которые также передают обратный ток на катушку, противоположную катушке статора, которая находится под напряжением, сложнее и дороже. Однако их более плавная и точная работа делает их более подходящими для промышленного применения.
Шаговый двигатель подходит не для всех задач. Если ваш проект требует непрерывного вращения двигателя на очень высоких скоростях (обычно более 2000 об/мин), многочисленные полюса в шаговом приводе могут вызвать такие условия, как потери на вихревые токи, которые снижают эффективность двигателя. Кроме того, износ ротора на таких высоких скоростях может сократить срок его службы.
Закажите корпус ЧПУ для вашего проекта обработки с ЧПУ
Применение робототехники для шаговых двигателей
Шаговые двигатели используются в самых разных областях, особенно в робототехнике. Поскольку шаговые двигатели обеспечивают точное позиционирование и надежные повторяющиеся движения, они идеально подходят для приложений, требующих длинных последовательностей быстрых и точных движений. Распространенные применения шаговых двигателей в робототехнике включают:
- Обработка с ЧПУ
- 3D- и 2D-печать
- Текстильное производство
- Медицинские устройства визуализации
- Системы хранения данных на жестких дисках
Каждое из этих приложений требует точного управления роторами, лазерами, печатающими головками, стилусами и другими автоматизированными роботизированными компонентами. Шаговые двигатели обеспечивают точное управление и надежность, необходимые инженерам при проектировании робототехнических систем. Однако для того, чтобы шаговые двигатели реализовали свой потенциал в этих приложениях, важно иметь четкое представление о том, как управлять шаговыми двигателями с использованием различных доступных методов управления напряжением.
Основы управления шаговым двигателем
По сути, основным методом управления шаговым двигателем является включение и выключение катушек, окружающих шестерню, в правильной последовательности. Изменение последовательности и времени активации катушки — это то, как инженеры настраивают работу шагового двигателя в соответствии с потребностями своих приложений.
Изменения в подаче тока на шаговый двигатель могут привести к чрезвычайно тонким и точным различиям в позиционировании. Точность шагового двигателя зависит от количества его шагов, то есть от количества различных позиций, которые он занимает в течение полного цикла вращения. Шаговый двигатель с большим количеством шагов будет в большей степени способен создавать более точные различия в позиционировании. Уровень точности, которого может достичь шаговый двигатель, известен как разрешение двигателя.
Основные режимы управления шаговым двигателем:
- Волновой привод/Однофазный: последовательно активируется одна катушка. Это самый простой режим работы шагового двигателя, дающий самое низкое разрешение.
- Полный шаг: Две катушки последовательно активируются одновременно, поэтому полярные положения ротора фактически находятся между каждой катушкой. Этот режим полезен для улучшения крутящего момента и скорости двигателя, но он не увеличивает разрешение двигателя, поскольку число шагов остается прежним.
- Полушаг: Активируется одна катушка, а затем одновременно активируются две катушки на следующем этапе. Таким образом, ротор перемещается на полшага за раз от положения прямого выравнивания, когда активна одна катушка, до положения раздельного выравнивания, когда активны две катушки. Этот режим фактически добавляет дополнительные шаги к вращению двигателя, поэтому он существенно увеличивает разрешение.
- Микрошаг: Катушки активируются серией синусоидальных импульсов, которые перемещают ротор очень маленькими шагами. Этот метод дает самое высокое разрешение из всех перечисленных здесь, благодаря его способности подразделять полный цикл ротора на 256 шагов. Микрошаг также перемещает ротор очень плавно и последовательно, что помогает снизить вибрацию, шум и износ компонентов двигателя. Благодаря этим преимуществам микрошаговый режим является наиболее распространенным режимом активации шаговых двигателей в современных приложениях.
Также можно увеличить разрешение шагового двигателя, увеличив количество катушек и полюсов. Большинство шаговых двигателей, используемых профессиональными инженерами, имеют большое количество катушек, которые обеспечивают около 200 шагов до микрошага. В совокупности эти параметры дают инженерам, использующим шаговые двигатели, множество различных возможностей для повышения точности разрешающей способности двигателя.
Каждый шаговый двигатель управляется через схему драйвера, которая передает ток на катушки, чтобы активировать их. Поскольку весь механизм, управляющий шаговым двигателем, начинается с контроллера двигателя, очень важно, чтобы элементы управления шаговым двигателем были разработаны тщательно и в соответствии с передовыми методами. В следующих разделах мы кратко рассмотрим основы, которые вам необходимо знать при разработке схемы драйвера шагового двигателя.
Основы выбора привода шагового двигателя
Схема привода шагового двигателя обычно подключается к микроконтроллеру, который обеспечивает оператору двигателя контроль над импульсами напряжения, посылаемыми на катушки. Для схем шагового привода доступно множество различных вариантов, в том числе некоторые модели, предназначенные для готового использования в качестве контроллера шагового двигателя. Другие используют программируемые микроконтроллеры, такие как Arduino Uno, которые можно запрограммировать с помощью библиотеки управления шаговыми двигателями с открытым исходным кодом.
При выборе схемы драйвера шагового двигателя начните с четырех основных факторов:
- Напряжение: Драйвер должен быть рассчитан на самые разные уровни напряжения, так как вам, вероятно, придется протестировать различные напряжения, чтобы найти наилучший вариант. Ваш шаговый двигатель.
- Ток: Драйвер должен быть рассчитан как минимум в 1,4 раза выше номинального максимального тока шагового двигателя.
- Микрошаг: Драйвер должен иметь несколько вариантов разрешения шага, чтобы вы могли экспериментировать с различными настройками микрошага.
- Максимальный импульс шага: Драйвер должен быть рассчитан на достаточное количество импульсов шага для вращения ротора со скоростью, требуемой вашим приложением.
Другие факторы при выборе шагового привода
Несмотря на относительно простую конструкцию шаговых двигателей, определение правильного шагового двигателя и разработка соответствующей системы управления могут быть сложной задачей. На четыре фактора, которые мы только что обсудили, может влиять множество других факторов, заслуживающих внимания.
При проектировании системы, включающей шаговый двигатель, обязательно учитывайте следующее:
- Если в вашем приложении требуются определенные скорости вращения и крутящий момент, подобрать правильный двигатель и привод может быть непросто, даже если вышеуказанные условия соблюдены. считается. Как правило, наиболее точным методом согласования двигателя и привода является использование инженерного программного обеспечения с соответствующими кривыми скорость-момент. Начните с привода с требуемыми характеристиками напряжения и тока, а затем сопоставьте его с двигателем, используя кривую скорость-момент.
- Несоответствие крутящего момента является распространенной проблемой в конструкции привода шагового двигателя, которая может вызвать остановку (из-за недостаточного крутящего момента) или вибрацию и шум (из-за чрезмерного крутящего момента). Чтобы получить правильный крутящий момент, начните с расчета крутящего момента нагрузки для желаемой задачи, которую должен выполнить двигатель. После того, как вы определили требуемый крутящий момент нагрузки, используйте методы согласования нагрузки и крутящего момента двигателя, чтобы убедиться, что крутящий момент вашего двигателя находится в оптимальном диапазоне.
- Помните, что шаговому двигателю требуется полный ток для создания удерживающего момента, а это означает, что шаговый двигатель может сильно нагреться, если он удерживается в одном положении в течение длительного времени. Обязательно учитывайте это при проектировании систем охлаждения.
- Биполярные шаговые двигатели требуют несколько более сложных схем управления, чем униполярные шаговые двигатели, потому что они должны одновременно передавать отрицательный ток на противоположную катушку. Если вы используете биполярный шаговый двигатель, убедитесь, что ваш привод рассчитан на управление биполярными двигателями.
- Блок управления шаговым двигателем должен быть защищен электрическими шкафами, чтобы защитить его от опасностей окружающей среды. В зависимости от условий эксплуатации двигателя проводка его распределительной коробки может загрязняться пылью и мусором или повреждаться брызгами воды (среди многих других возможных опасностей).
Корпуса Polycase для блоков управления шаговыми двигателями
Электрические шкафы Polycase — отличный выбор для инженеров, разрабатывающих блоки управления шаговыми двигателями. Инженеры выбирают корпуса Polycase, когда им нужна производительность с рейтингом UL, элегантный дизайн и материалы высочайшего качества для корпусов шаговых двигателей. Кроме того, мы предлагаем варианты индивидуальной настройки корпуса, которые позволяют невероятно быстро и легко модифицировать корпус с помощью вырезов на станке с ЧПУ и цифровой печати.
Ниже приведены некоторые из наиболее популярных электрических шкафов для наших промышленных клиентов, которые используют их для защиты оборудования, такого как блоки управления шаговыми двигателями:
- Серия ZH: Прочные навесные поликарбонатные шкафы, подходящие для использования внутри и вне помещений.
- Серия SA: Корпуса для наружного применения из нержавеющей стали с характеристиками, соответствующими их элегантному внешнему виду.
- Серия EX: Корпуса из экструдированного алюминия с красивой отделкой и встроенными направляющими для удобного монтажа на печатной плате.
Прочный и доступный корпус из поликарбоната
Полностью собранный шаговый двигатель, включая металлический корпус.
Вам нужен идеальный электрический шкаф для размещения шагового двигателя и/или блока управления двигателем? Наши специалисты по электромонтажным шкафам всегда рады помочь вам выбрать модель, соответствующую вашим потребностям. Позвоните в Polycase по телефону 1-800-248-1233, чтобы поговорить со специалистом по корпусам, или свяжитесь с нами через Интернет в любое время.
Кредиты изображений
Alexlmx/shutterstock.com
Fouad A. Saad/Shutterstock.com
Deardiamond67/shutterstock.com
112
12912912912912912912912912911291129112911262ock..com
12629..com
1126SLOCK.com
92929126SLOCK. .com
ашаркью/Shutterstock.com
sspopov/Shutterstock.com
sfam_photo/Shutterstock.com
/Shutterstock Starod.comub 3 20292
similis/Shutterstock.com
luchschenF/Shutterstock.com
ValeriaES/Shutterstock.com
Схемы управления на шаговых двигателях 90 Элементы управления на шаговых двигателях
Часть Шаговые двигатели по T HE U НИВЕРСИТИ |
- Введение
- Двигатели с переменным сопротивлением
- Униполярные двигатели с постоянными магнитами и гибридные двигатели
- Практичные драйверы с униполярным и переменным магнитным сопротивлением
- Биполярные моторы и Н-образные мосты
- Практические схемы биполярного привода
Этот раздел учебника по степперу посвящен основному заключительному этапу.
схемы управления шаговыми двигателями. Эта схема сосредоточена на одном
проблема, включение и выключение тока в каждой обмотке двигателя и управление
его направление. Схема, обсуждаемая в этом разделе, подключается напрямую
к обмоткам двигателя и источнику питания двигателя, и эта схема
управляется цифровой системой, которая определяет, когда переключатели повернуты
включено или выключено.
В этом разделе рассматриваются все типы двигателей, начиная с элементарной схемы, необходимой
для управления двигателем с переменным сопротивлением, к схеме Н-моста, необходимой для
управлять биполярным двигателем с постоянными магнитами. Каждый класс схемы привода
проиллюстрированы практическими примерами, но эти примеры не предназначены для
исчерпывающий каталог коммерчески доступных схем управления, а также
информация, представленная здесь, предназначена для замены информации, найденной
в паспортах компонентов производителя для упомянутых деталей.
В этом разделе рассматриваются только самые элементарные схемы управления для каждого
класс мотора. Все эти схемы предполагают, что питание двигателя
обеспечивает напряжение привода не выше номинального напряжения двигателя, и это
существенно ограничивает двигательную активность. Следующий раздел, посвященный текущим ограниченным
схема привода, охватывает практические высокопроизводительные схемы привода.
Типовые контроллеры для шаговых двигателей с переменным сопротивлением
являются вариациями контура, показанного на рис. 3.1:
Рисунок 3.1
На рис. 3.1 прямоугольники используются для обозначения переключателей; контроль
блок, не показанный, отвечает за подачу управляющих сигналов на открытие
и замкните выключатели в соответствующее время, чтобы раскрутить моторы.
Во многих случаях блоком управления будет компьютер или программируемый интерфейс.
контроллер с программным обеспечением, непосредственно генерирующим выходные данные, необходимые для управления
переключатели, но в других случаях вводится дополнительная схема управления,
иногда безвозмездно!
Обмотки двигателя, соленоиды и подобные устройства являются индуктивными нагрузками. В качестве
таким образом, ток через обмотку двигателя не может быть включен или выключен
мгновенно без привлечения бесконечных напряжений! Когда переключатель
управляющая обмотка двигателя замкнута, позволяя току течь, результат
это медленное нарастание тока. Когда переключатель, управляющий двигателем
обмотка разомкнута, результатом этого является всплеск напряжения, который может серьезно
повредить переключатель, если не принять меры по обращению с ним должным образом.
Есть два основных способа справиться с этим скачком напряжения. Один из них
шунтировать обмотку двигателя диодом, а другой шунтировать двигатель
обмотка с конденсатором. Рисунок 3.2 иллюстрирует оба подхода:
Рисунок 3.2
Диод, показанный на рис. 3.2, должен выдерживать полный ток.
через обмотку двигателя, но он будет проводить только кратковременно каждый раз, когда
выключатель выключается, так как ток через обмотку затухает. Если
относительно медленные диоды, такие как обычное семейство 1N400X, используются вместе
с быстрым переключателем может потребоваться добавить небольшой конденсатор в
параллельно диоду.
Конденсатор, показанный на рис. 3.2, имеет более сложную конструкцию!
Когда переключатель замкнут, конденсатор разряжается через переключатель
на землю, и коммутатор должен быть в состоянии справиться с этим кратким всплеском
разрядный ток. Резистор последовательно с конденсатором или последовательно
с блоком питания будет ограничивать этот ток. Когда переключатель открыт,
накопленная энергия в обмотке двигателя зарядит конденсатор до
напряжение значительно выше напряжения питания, и переключатель должен быть
способен выдержать это напряжение. Чтобы определить размер конденсатора,
приравняем две формулы запасенной энергии в резонансном контуре:
Р = С В 2 / 2
P = L I 2 / 2
Где:
P — накопленная энергия в ватт-секундах или кулон-вольтах
C — емкость, в фарадах
В — напряжение на конденсаторе
L — индуктивность обмотки двигателя, в генри
I — ток через обмотку двигателя
Решение для минимального размера конденсатора, необходимого для предотвращения перенапряжения
на коммутаторе довольно легко:
С > L I 2
/ ( В б — В с ) 2
Где:
В б — напряжение пробоя выключателя
В с — напряжение питания
Двигатели с переменным сопротивлением имеют переменную индуктивность, которая зависит от
угол вала. Поэтому для выбора нужно использовать схему наихудшего случая.
конденсатор. Кроме того, индуктивность двигателя часто плохо документируется.
если вообще.
Конденсатор и обмотка двигателя вместе образуют резонансный контур.
Если система управления управляет двигателем на частотах, близких к резонансным
частота этой цепи, ток двигателя через обмотки двигателя,
и, следовательно, крутящий момент, создаваемый двигателем, будет совсем другим
от установившегося крутящего момента при номинальном рабочем напряжении! Резонансный
частота:
ф = 1 /
( 2π ( Л С ) 0,5 )
Опять же, электрическая резонансная частота для двигателя с переменным сопротивлением
будет зависеть от угла вала! Когда работают двигатели с переменным сопротивлением
с возбуждающими импульсами, близкими к резонансу, колебательный ток в
обмотка двигателя приведет к магнитному полю, которое удваивается до нуля
резонансной частоты, и это может сильно снизить доступный крутящий момент!
Типовые контроллеры для униполярных шаговых двигателей
являются вариациями контура, показанного на рис. 3.3:
Рисунок 3.3
На рис. 3.3, как и на рис. 3.1, прямоугольники используются для представления переключателей;
блок управления, не показанный, отвечает за подачу управляющих сигналов
открывать и закрывать переключатели в нужное время, чтобы вращаться
моторы. Блок управления обычно представляет собой компьютер или программируемый
контроллер интерфейса с программным обеспечением, непосредственно генерирующим необходимые выходные данные
для управления переключателями.
Как и в случае со схемой привода для двигателей с переменным сопротивлением, мы должны иметь дело с
индуктивный толчок, возникающий при выключении каждого из этих переключателей.
Опять же, мы можем шунтировать индуктивный удар с помощью диодов, но теперь 4 диода
требуются, как показано на рисунке 3.4:
Рисунок 3.4
Дополнительные диоды необходимы, потому что обмотка двигателя не является двумя независимыми.
катушки индуктивности, это одна катушка индуктивности с центральным отводом с центральным выводом на
фиксированное напряжение. Это действует как автотрансформатор! Когда один конец двигателя
обмотка опущена, другой конец взлетит вверх, и наоборот. Когда
переключатель размыкается, индуктивная отдача приводит в действие этот конец обмотки двигателя.
к плюсу питания, где он зажат диодом. Противоположный конец
полетит вниз, и если бы он не плавал при напряжении питания на
время, он упадет под землю, инвертируя напряжение на переключателе в
что конец. Некоторые переключатели невосприимчивы к таким реверсам, но другие могут быть
серьезно поврежден.
Конденсатор также можно использовать для ограничения напряжения отдачи, как показано на рис.
Рисунок 3.5:
Рисунок 3.5
Правила выбора конденсатора, показанные на рис. 3.5, такие же, как и для
правила выбора конденсатора, показанные на рис. 3.2, но влияние
резонанс совсем другой! С двигателем с постоянными магнитами, если конденсатор
вращается на резонансной частоте или около нее, крутящий момент увеличится до
вдвое больше крутящего момента на низких оборотах! Результирующая кривая зависимости крутящего момента от скорости
может быть довольно сложным, как показано на рис. 3.6:
Рисунок 3.6
На рис. 3.6 показан пик располагаемого крутящего момента при электрическом резонансе.
частоте и долине на механической резонансной частоте. Если
электрическая резонансная частота помещается соответственно выше того, что было бы
была скорость отсечки для двигателя с использованием драйвера на основе диода, эффект
может значительно увеличить эффективную скорость отсечки.
Механическая резонансная частота зависит от крутящего момента, поэтому, если
механическая резонансная частота близка к электрическому резонансу,
он будет сдвинут электрическим резонансом! Кроме того,
ширина механического резонанса зависит от локального наклона
кривая зависимости крутящего момента от скорости; если крутящий момент падает со скоростью, механический
резонанс будет острее, а если крутящий момент будет расти с увеличением скорости, то
быть более широким или даже разделенным на несколько резонансных частот.
В приведенных выше схемах детали необходимых переключателей были
намеренно игнорируется. Любая коммутационная техника, от тумблеров до
силовые МОП-транзисторы будут работать! Рисунок 3.7 содержит некоторые предложения по
реализация каждого переключателя с обмоткой двигателя и защитным диодом
включено для целей ориентации:
Рисунок 3.7
Каждый из переключателей, показанных на рис. 3.7, совместим с входом TTL.
Источник питания 5 вольт, используемый для логики, включая 7407 с открытым коллектором.
Драйвер, используемый на рисунке, должен быть хорошо отрегулирован. Мощность двигателя,
обычно от 5 до 24 вольт, требует минимальной регулировки. это
Стоит отметить, что эти силовые схемы переключения подходят для
соленоидов, двигателей постоянного тока и других индуктивных нагрузок, а также для управления
шаговые двигатели.
Транзистор SK3180, показанный на рис. 3.7, представляет собой силовой дарлингтон с
текущий прирост свыше 1000; таким образом, 10 мА, протекающие через 470 Ом
резистора смещения более чем достаточно, чтобы транзистор мог переключаться на несколько
ток через обмотку двигателя. Буфер 7407, используемый для управления
Дарлингтон можно заменить любой высоковольтной микросхемой с открытым коллектором, которая
может поглотить по крайней мере 10 миллиампер. В случае выхода из строя транзистора
высоковольтный драйвер с открытым коллектором служит для защиты
остальная часть логической схемы от источника питания двигателя.
IRC IRL540, показанный на рис. 3.7, представляет собой силовой полевой транзистор.
Это может выдерживать токи до 20 ампер и ломается.
неразрушающий при 100 вольт; в результате этот чип может поглощать индуктивное
шипы без защитных диодов, если он подключен к достаточно большому накалу
раковина. У этого транзистора очень быстрое время переключения, поэтому защита
диоды должны быть сравнительно быстродействующими или зашунтированы небольшими конденсаторами. Это
особенно важно с диодами, используемыми для защиты транзистора
против обратного смещения! В случае выхода из строя транзистора стабилитрон
диод и резистор 100 Ом защищают схему ТТЛ. Резистор 100 Ом
также несколько замедляет время переключения транзистора.
Для приложений, где каждая обмотка двигателя потребляет менее 500 миллиампер,
в
ULN200x
семейство массивов Дарлингтона из
Аллегро Микросистемс,
также доступен как
DS200x
из
National Semiconductor и как
Массив Дарлингтона Motorola MC1413 будет управлять
несколько обмоток двигателя или другие индуктивные нагрузки непосредственно с логических входов.
На рис. 3.8 показана разводка контактов широко доступного чипа ULN2003, массива
из 7 транзисторов Дарлингтона с TTL-совместимыми входами:
Рисунок 3.8
Базовый резистор на каждом транзисторе Дарлингтона соответствует стандарту.
биполярные ТТЛ выходы. Каждый дарлингтон NPN подключен к своему эмиттеру.
подключен к контакту 8, предназначенному для заземления, каждый
транзистор в этом корпусе защищен двумя диодами, один закорачивающий
эмиттер к коллектору, защищая от обратного напряжения на
транзистор, и один, соединяющий коллектор с выводом 9; если контакт 9 подключен
к плюсу двигателя, этот диод защитит транзистор от
индуктивные шипы.
Микросхема ULN2803 по сути такая же, как описанная микросхема ULN2003.
выше, за исключением того, что он находится в 18-контактном корпусе и содержит 8 дарлингтонов,
позволяет использовать один чип для управления парой обычных однополярных
двигатели с постоянными магнитами или с переменным сопротивлением.
Для двигателей с током менее 600 мА на обмотку
УДН2547Б
Quad Power Driver производства
Аллегро Микросистемс
будет обрабатывать все 4 обмотки общего униполярного
шаговые двигатели. Для двигателей с током менее 300 мА на обмотку:
Texas Instruments SN7541, 7542 и 7543 с двойным питанием
водители — хороший выбор; обе эти альтернативы включают некоторую логику
с силовыми драйверами.
С биполярными шаговыми двигателями с постоянными магнитами все сложнее.
потому что у них нет центральных отводов на их обмотках. Поэтому, чтобы обратить
направление поля, создаваемого обмоткой двигателя, нам нужно изменить на противоположное
ток через обмотку. Мы могли бы использовать двойной бросок с двойным полюсом
переключатель, чтобы сделать это электромеханически; электронный эквивалент такого
коммутатор называется H-мостом и показан на рис. 3.9:
Рисунок 3.9
Как и в униполярных приводных схемах, которые обсуждались ранее, используемые переключатели
в H-мосте должны быть защищены от скачков напряжения, вызванных поворотом
пропадание питания в обмотке двигателя. Обычно это делается с помощью диодов, как показано на рисунке.
на рисунке 3.9.
Стоит отметить, что Н-мосты применимы не только для управления
биполярные шаговые двигатели, но и для управления двигателями постоянного тока, двухтактные
соленоиды (с плунжерами на постоянных магнитах) и многие другие применения.
С 4 переключателями базовый H-мост предлагает 16 возможных
режимов работы, 7 из которых коротит по питанию! Следующее
Интересуют режимы работы:
- Прямой режим , переключатели A и D замкнуты.
- Реверсивный режим , переключатели B и C замкнуты.
- Это обычные рабочие режимы, позволяющие току течь от
питания, через обмотку двигателя и далее на землю.
Рисунок 3.10 иллюстрирует прямой режим:Рисунок 3.
10 - Режим быстрого затухания или режим выбега , все переключатели разомкнуты.
- Любой ток, протекающий через обмотку двигателя, будет работать против
полное напряжение питания плюс два падения диода, поэтому ток будет затухать
быстро. Этот режим практически не оказывает динамического тормозного эффекта на
ротор двигателя, так что ротор будет свободно вращаться по инерции, если все обмотки двигателя
питается в этом режиме.
На рис. 3.11 показано течение тока сразу после переключения с
прямой режим работы в режим быстрого затухания.Рисунок 3.11
- Режимы медленного затухания или режимы динамического торможения .
- В этих режимах ток может рециркулировать через обмотку двигателя
с минимальным сопротивлением. В результате, если ток течет в двигателе
обмотка при входе в один из этих режимов ток будет медленно затухать,
и если ротор двигателя вращается, он индуцирует ток, который будет действовать
как тормоз ротора. На рис. 3.12 показан один из многих полезных
режимы медленного затухания при замкнутом переключателе D; если обмотка двигателя недавно
находился в режиме прямого хода, состояние переключателя B может быть либо разомкнуто, либо
закрыто:Рисунок 3.12
Большинство H-мостов сконструированы таким образом, что логика, необходимая для предотвращения короткого
схема включена в конструкцию на очень низком уровне. Рисунок 3.13
иллюстрирует то, что, вероятно, является лучшим расположением:
Рисунок 3.13
Здесь доступны следующие режимы работы:
XY ABCD Режим 00 0000 быстрый распад 01 1001 вперед 10 0110 реверс 11 0101 медленный распад
Преимущество такой компоновки в том, что все полезные режимы работы
сохраняются и кодируются минимальным количеством битов; последний
важно при использовании микроконтроллера или компьютерной системы для управления
H-мост, потому что многие такие системы имеют только ограниченное количество доступных битов.
для параллельного вывода. К сожалению, немногие из интегрированных чипов H-моста на
рынке есть такая простая схема управления.
На рынке имеется ряд встроенных драйверов Н-моста, но
по-прежнему полезно взглянуть на реализацию дискретных компонентов для понимания
как работает Н-мост. Антонио Рапозо
([email protected]) предложил схему H-моста, показанную на рис. 3.14;
Рисунок 3.14
Входы X и Y этой схемы могут управляться открытым коллектором.
Выходы TTL, как в схеме униполярного возбуждения на основе Дарлингтона.
на рисунке 3.7. Обмотка двигателя будет находиться под напряжением, если ровно один из
входы X и Y высокие, и ровно один из них низкий. Если оба
низкий уровень, оба понижающих транзистора будут выключены.
Если оба имеют высокий уровень, оба подтягивающих транзистора будут выключены.
В результате эта простая схема переводит двигатель в режим динамического торможения.
как в состоянии 11, так и в состоянии 00, и не предлагает режим движения по инерции.
Схема на рис. 3.14 состоит из двух одинаковых половинок, каждая из которых
может быть правильно описан как двухтактный драйвер. Термин половинный H-мост
иногда применяется к этим схемам! Также стоит отметить, что
полуH-мост имеет схему, очень похожую на схему выходного привода
используется в логике TTL. Фактически, линейные драйверы TTL с тремя состояниями, такие как 74LS125A,
а 74LS244 можно использовать как полуH-мост для небольших нагрузок, как показано на рисунке.
на рисунке 3.15:
Рисунок 3.15
Эта схема эффективна для управления двигателями сопротивлением до 50 Ом на
обмотки при напряжении примерно до 4,5 вольт с использованием источника питания 5 вольт.
Каждый буфер с тремя состояниями в LS244 может потреблять примерно в два раза больше тока, чем он
может быть источником, а внутреннее сопротивление буферов достаточно, когда
источник тока, чтобы равномерно разделить ток между драйверами, которые
выполняются параллельно. Этот моторный привод допускает все полезные состояния
достигается драйвером на рис. 3.13, но эти состояния не кодируются как
эффективно:
XYE Режим —1 быстрый распад 000 более медленное затухание 010 вперед 100 реверс 110 медленный распад
Второй режим динамического торможения, XYE=110, обеспечивает несколько более слабое торможение.
эффект, чем первый из-за того, что драйверы LS244 могут больше просадить
ток, чем они могут получить.
Микрочип (ранее Telcom Semiconductor)
TC4467
Драйвер Quad CMOS — еще один пример драйвера общего назначения.
которые можно использовать как 4 независимых полупроводниковых моста. В отличие от предыдущих драйверов,
техпаспорт этого драйвера даже предлагает использовать его для управления двигателем
приложений, с напряжением питания до 18 вольт и
до 250 миллиампер на обмотку двигателя.
Одна из проблем с серийно выпускаемым управлением шаговым двигателем
чипов заключается в том, что многие из них имеют относительно короткий срок жизни на рынке. За
например, серия микросхем Seagate IPxMxx с двойным H-мостом (от IP1M10 до
IP3M12) были очень хорошо продуманы, но, к сожалению, оказалось, что
Seagate делала их только тогда, когда они использовали шаговые двигатели для позиционирования головы.
в дисководах Seagate. Тошиба ТА7279двойной драйвер H-моста будет
еще один отличный выбор для двигателей до 1 ампера, но опять же, это
судя по всему, сделано только для внутреннего пользования.
SGS-Томпсон
(и другие)
L293
двойной H-мост — близкий конкурент
для вышеперечисленных микросхем, но в отличие от них не содержит защитных диодов.
L293D
Чип, представленный позже, совместим по выводам и включает в себя эти диоды.
Если используется более ранняя версия L293, каждая обмотка двигателя должна быть подключена через перемычку.
выпрямитель (аналог 1N4001). Использование внешних диодов позволяет
резистор, который нужно поместить в текущий путь рециркуляции, чтобы ускорить распад
ток в обмотке двигателя при его выключении; это может быть желательно
в некоторых приложениях. L29Семейство 3 предлагает отличный выбор для вождения
небольшие биполярные шаговые двигатели, потребляющие до одного ампера на обмотку двигателя при напряжении до 36
вольт. На рис. 3.16 показана общая для микросхем L293B и L293D разводка выводов:
Рисунок 3.16
Этот чип можно рассматривать как 4 независимых полупроводниковых моста, включенных попарно.
или как два полных Н-моста. Это силовой DIP-пакет с контактами 4, 5, 12.
и 13 предназначены для отвода тепла к печатной плате или внешнему радиатору.
SGS-Томпсон
(и другие)
L298
двойной H-мост очень похож на
выше, но способен выдерживать до 2 ампер на канал и упакован как
силовой компонент; как и в случае с LS244, безопасно подключать два H-моста.
в корпусе L298 в один 4-амперный H-мост (в паспорте на эту микросхему
дает конкретные советы о том, как это сделать). Одно предупреждение уместно
относительно L298; этот чип очень быстро переключается, достаточно быстро, чтобы
банальные защитные диоды (эквивалент 1N400X) не работают. Вместо,
используйте диод, такой как BYV27. Национальный полупроводник LMD18200
H-мост — еще один хороший пример; это обрабатывает до 3 ампер и имеет встроенный
защитные диоды.
В то время как встроенные H-мосты недоступны для очень больших токов или очень
высоким напряжением, на рынке есть хорошо спроектированные компоненты, упрощающие
построение Н-мостов из дискретных коммутаторов. Например,
International Rectifier продает линейку
драйверы половинного Н-моста; два таких чипа плюс 4 переключающих транзистора MOSFET
достаточно построить H-мост.
ИР2101,
ИР2102
а также
ИР2103
являются основными драйверами половины Н-моста. Каждая из этих микросхем имеет 2 логических входа для
напрямую управлять двумя переключающими транзисторами на одной ноге H-моста.
ИР2104
а также
ИР2111
имеют аналогичную логику на стороне выхода для управления переключателями H-моста, но
они также включают логику на стороне ввода, которая в некоторых приложениях может уменьшить
потребность во внешней логике. В частности, 2104 включает в себя вход включения, поэтому
что 4 микросхемы 2104 плюс 8 переключающих транзисторов могут заменить L293 без
нужна дополнительная логика.
Технический паспорт для
Микрочип (ранее Telcom Semiconductor)
TC4467
семейство четырехъядерных CMOS-драйверов включает информацию о том, как использовать драйверы в этом
семейство для управления силовыми полевыми МОП-транзисторами Н-моста, работающими от напряжения до 15 вольт.
Ряд производителей выпускают сложные микросхемы Н-моста, включающие ток
схема ограничения; они являются предметом следующего раздела.
Также стоит отметить наличие ряда 3-х фазных мостовых драйверов на
рынок, подходящий для привода Y или треугольника, 3-фазный, постоянный
магнитные степперы. Таких моторов мало, и фишек этих не было
разработан с учетом степперов. Тем не менее, Toshiba TA7288P,
GL7438, TA8400 и TA8405 — чистые конструкции, и 2 таких чипа, с
один из 6 игнорируемых полумостов будет чисто управлять 5-обмоточной 10
шаг на оборот двигателя.
Схема контроллера шагового двигателя
Главная » Схемы
Шаговые двигатели доступны в нескольких версиях и размерах с различными рабочими напряжениями. Преимущество этого универсального контроллера в том, что его можно использовать с широким диапазоном рабочих напряжений, примерно от 5 В до 18 В. Он может управлять двигателем с пиковым напряжением, равным половине напряжения питания, поэтому он может легко работать с шаговыми двигателями, рассчитанными на напряжение от 2,5 В до 9 В.V.
Схема также может обеспечивать ток двигателя до 3,5 А, что означает, что ее можно использовать для управления относительно большими двигателями. Цепь также защищена от короткого замыкания и имеет встроенную защиту от перегрева. Для управления шаговым двигателем необходимы два сигнала. С точки зрения логики, они представляют собой код Грея, что означает, что они представляют собой два сигнала прямоугольной формы с одинаковой частотой, но с постоянной разностью фаз в 90 градусов.
IC1 генерирует прямоугольный сигнал с частотой, которую можно установить с помощью потенциометра P1. Эта частота определяет скорость вращения шагового двигателя. Код Грея генерируется десятичным счетчиком в виде 4017. Выходы Q0–Q9счетчика последовательно становятся высокими в ответ на нарастающие фронты тактового сигнала. Код Грея может быть сгенерирован из выходов с помощью двух логических элементов ИЛИ, которые здесь сформированы с использованием двух диодов и резистора для каждого вентиля, для получения сигналов I и Q.
Здесь «I» означает «синфазный», а «Q» — «квадратурный», что означает сдвиг фазы на 90 градусов относительно сигнала I. Общепринятой практикой является управление обмотками шагового двигателя с помощью пары двухтактных цепей для каждой обмотки, что называется «Н-мост». Это позволяет изменить направление тока через каждую обмотку, что необходимо для правильной работы биполярного двигателя (того, обмотки которого не имеют отводов от центра).
Конечно, его также можно использовать для управления униполярным двигателем (с обмотками с отводом от середины). Вместо того, чтобы использовать двухтактную схему такого рода, здесь мы решили использовать микросхемы аудиоусилителя (типа TDA2030), хотя это может показаться немного странным. С функциональной точки зрения TDA2030 на самом деле является своего рода силовым операционным усилителем. Он имеет дифференциальный усилитель на входе и двухтактный драйвер на выходе.
Схема цепи:
Схема цепи контроллера шагового двигателя
IC3, IC4 и IC5 относятся к этому типу (по экономичной цене). Здесь IC3 и IC4 подключены как компараторы. Их неинвертирующие входы управляются ранее упомянутыми сигналами I и Q, а инвертирующие входы настроены на потенциал, равный половине напряжения питания. Этот потенциал обеспечивает третий TDA2030. Таким образом, выходы IC3 и IC4 отслеживают их неинвертирующие входы, и каждый из них управляет одной обмоткой двигателя.
Другие концы обмоток в свою очередь подключены к половинному напряжению питания, обеспечиваемому IC5. Поскольку один конец каждой обмотки подключен к прямоугольному сигналу, который попеременно колеблется между 0 В и потенциалом, близким к напряжению питания, а другой конец находится на половине напряжения питания, всегда прикладывается напряжение, равное половине напряжения питания. к каждой обмотке, но меняет полярность в соответствии с состояниями сигналов I и Q.
Это именно то, что нам нужно для привода биполярного шагового двигателя. Скорость вращения можно изменять с помощью потенциометра P1, но фактическая скорость различна для каждого типа двигателя, поскольку она зависит от количества шагов на оборот. Двигатель, использованный в прототипе, продвигался примерно на 9° за шаг, а его скорость можно было регулировать в диапазоне примерно от 2 до 10 секунд на оборот.
В принципе, любую желаемую скорость можно получить, регулируя значение C1, если двигатель может это выдержать. Диапазон регулировки Р1 можно увеличить, уменьшив номинал резистора R5. Диапазон регулировки составляет 1:(1000 + R5)/R5, где R5 дается в k. Если шаговый двигатель выключается путем отключения напряжения питания от цепи, двигатель может продолжать вращаться некоторое время из-за собственная инерция или механическая нагрузка на двигатель (эффект маховика).
Также возможно, что положение двигателя не соответствует состояниям сигналов I и Q при первом включении питания в цепь. В результате двигатель иногда может «запутаться» при запуске, в результате чего он делает шаг в неправильном направлении, прежде чем начать движение в направлении, определяемом сигналами привода. Этих эффектов можно избежать, добавив дополнительный переключатель S1 и резистор 1 кОм, которые затем можно использовать для запуска и остановки двигателя. Когда S1 замкнут, тактовый сигнал прекращается, но IC2 сохраняет свои выходные уровни в этот момент, поэтому непрерывные токи через обмотки двигателя магнитно «запирают» ротор в нужном положении.
TDA2030 имеет внутреннюю защиту от перегрева, поэтому выходной ток автоматически уменьшается, если микросхема становится слишком горячей. По этой причине рекомендуется устанавливать IC3, IC4 и IC5 на радиатор (возможно, общий радиатор), когда используется относительно мощный двигатель. Выступ корпуса TO220 электрически соединен с выводом отрицательного напряжения питания, поэтому ИС можно прикрепить к общему радиатору без использования изолирующих шайб.
Автор: Герт Баарс — Copyright: Elektor Electronics Magazine
Схема драйвера шагового двигателя с использованием IC 555
Узнайте, как сделать простую схему драйвера униполярного шагового двигателя, используя микросхему таймера 555. Помимо таймера 555 нам также понадобится микросхема CD 4017, представляющая собой микросхему счетчика декад.
By Ankit Negi
Любой униполярный двигатель может быть подключен к этой схеме для выполнения конкретной задачи, хотя сначала необходимо внести небольшие изменения.
Скорость шагового двигателя можно контролировать с помощью потенциометра, подключенного между разрядным и пороговым выводами таймера 555.
Содержание
Основы работы с шаговыми двигателями
Шаговые двигатели используются в областях, где требуется определенное число оборотов, недостижимое при использовании обычных двигателей постоянного тока. Типичное применение шагового двигателя — 3D-ПРИНТЕР. Вы найдете два типа популярных шаговых двигателей: UNIPOLAR и BIPOLAR.
Как следует из названия, униполярный шаговый двигатель содержит обмотки с общим проводом, на которые можно легко подавать питание одну за другой.
В то время как биполярный шаговый двигатель не имеет общей клеммы между катушками, из-за чего он не может управляться просто с помощью предложенной схемы. Для управления биполярным шаговым двигателем нам нужна схема h-моста.
Компоненты:
1. 555 Таймер IC
2. CD 4017 IC
3. Резисторы 4.7K, 1K
4. Потенциометр 220K
5. 1 UF Конденсатор
6. 4 Diodes 1N4007
7 4 ТРАНЗИСТОРЫ 2N2222
8. УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ
9. ИСТОЧНИК ПИТАНИЯ ПОСТОЯННОГО ТОКА
НАЗНАЧЕНИЕ ТАЙМЕРА 555:
Таймер 555 требуется здесь для генерации тактовых импульсов определенной частоты (может быть изменена с помощью потенциометра 220k), которая определяет скорость шагового двигателя.
IC 555 Детали распиновки
НАЗНАЧЕНИЕ CD4017:
Как уже упоминалось выше, это ИС декадного счетчика, т.е. она может считать до 10 тактовых импульсов. Что делает эту микросхему особенной, так это то, что она имеет собственный встроенный декодер. Благодаря чему вам не придется добавлять дополнительную ИС для декодирования двоичных чисел.
4017 подсчитывает до 10 тактовых импульсов от таймера 555 и выдает высокий выходной сигнал, соответствующий каждому тактовому импульсу один за другим с его 10 выходных контактов. Единовременно только один штифт высокий.
НАЗНАЧЕНИЕ ТРАНЗИСТОРОВ:
Здесь транзисторы используются для двух целей:
1. Транзисторы действуют здесь как переключатели, таким образом возбуждая одну катушку за раз.
2. Транзисторы позволяют большому току проходить через них, а затем через двигатель, таким образом полностью исключая таймер 555, так как он может обеспечить очень небольшое количество тока.
ЭЛЕКТРИЧЕСКАЯ СХЕМА:
Выполните соединения, как показано на рисунке.
1. Подключите контакт 3 или выходной контакт таймера 555 к контакту 14 (тактовый контакт) микросхемы 4017.
2. Подключите контакт включения или 13-й контакт 4017 к земле.
3. Подключить контакты 3,2,4,7 по одному к транзисторам 1,2,3,4 соответственно.
4. Подключите 10-й и 15-й контакты к земле через резистор 1 кОм.
5. Подключите общий провод шагового двигателя к плюсу питания.
6. Подсоедините другие провода шагового двигателя таким образом, чтобы обмотки запитывались одна за другой, чтобы правильно совершить один полный оборот (см. техпаспорт двигателя, предоставленный производителем)
ПОЧЕМУ ВЫХОДНОЙ КОНТАКТ 10 IC 4017 СОЕДИНЕН С ЕГО КОНТАКТОМ 15 (КОНТАКТ СБРОСА)?
Как уже упоминалось выше, 4017 считает тактовые импульсы один за другим до 10-го тактового импульса и соответственно выдает высокий уровень на выходных контактах, каждый выходной контакт становится высоким.
Это приводит к некоторой задержке вращения двигателя, которая не является необходимой. Поскольку нам требуются только первые четыре контакта для одного полного оборота двигателя или первые четыре десятичных счета от 0 до 3, номер контакта. 10 подключен к контакту 15, так что после 4-го счета IC сбрасывается и счет начинается снова с начала. Это гарантирует отсутствие прерывания вращения двигателя.
РАБОТАЕТ:
После правильного подключения, если вы включите цепь, двигатель начнет вращаться ступенчато. Таймер 555 выдает тактовые импульсы в зависимости от номиналов резистора, потенциометра и конденсатора.
При изменении значения любой из этих трех составляющих частота тактового импульса изменится.
Эти тактовые импульсы подаются на IC CD 4017, который затем считает тактовые импульсы один за другим и выдает 1 в качестве вывода на выводы № 3, 2, 4, 7 соответственно и повторяет этот процесс непрерывно.
Поскольку транзистор Q1 подключен к контакту 3, он включается первым, затем транзистор Q2, затем Q3 и Q4. Но когда один транзистор включен, все остальные остаются выключенными.
Когда Q1 включен, он действует как замкнутый переключатель, и ток течет по общему проводу к проводу 1, а затем к земле через транзистор Q1.
Это подает питание на катушку 1, и двигатель вращается под некоторым углом, который зависит от тактовой частоты. Затем то же самое происходит с Q2, который возбуждает катушку 2, затем катушку 3 и катушку 4. Таким образом, получается один полный оборот.
При вращении потенциометра:
Предположим, изначально положение потенциометра таково, что между разрядным и пороговым контактом имеется максимальное сопротивление (220 кОм).