Содержание
Схема управления бесколлекторным двигателем постоянного тока. В чем разница между коллекторными и бесколлекторными моторами
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Рисунок 2. Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).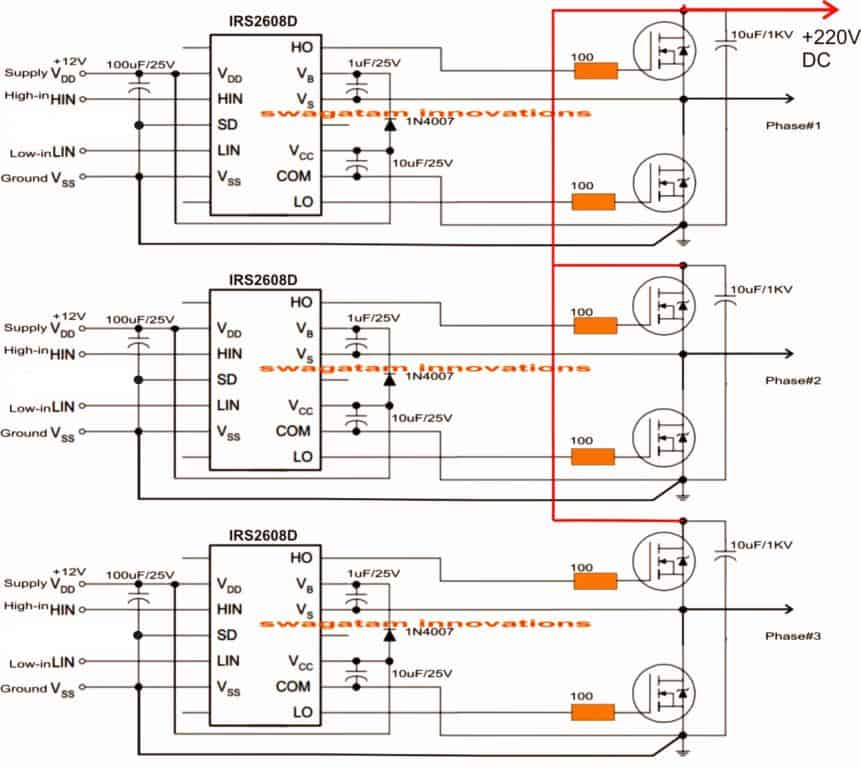
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
а. б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).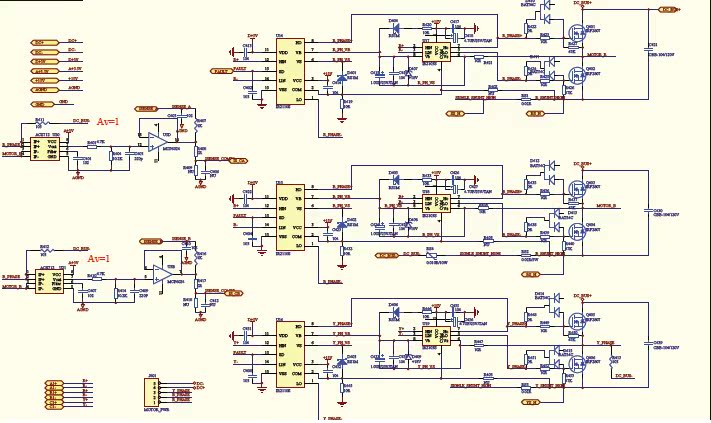
Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | + | 2 | |
| 2 | — | + | 3 | |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.
Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.
Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.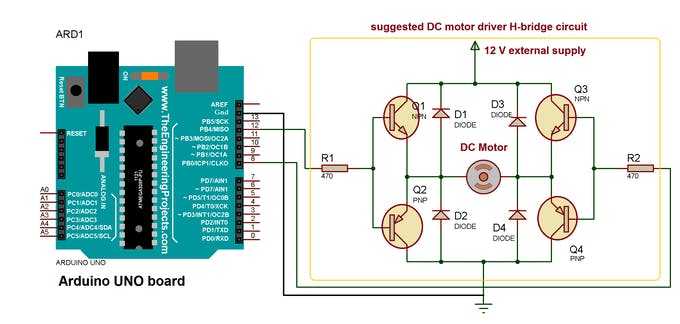
Схема со средней точкой
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
бесколлекторный двигатель
Добавить метки
Как только я начал заниматся авиамоделизмом, мне сразу стало интересно почему у двигателя три провода, почему он такой маленький и в то же время такой мощный и зачем ему нужен регулятор скорости. .. Прошло время, и я во всем разобрался. И дальше поставил перед собой задачу сделать своими руками бесколлекторный двигатель.
.. Прошло время, и я во всем разобрался. И дальше поставил перед собой задачу сделать своими руками бесколлекторный двигатель.
Принцип работы электрического двигателя:
В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера
, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора
и подвижной части — Ротора
. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор
(щетки).
Бесколлекторный двигатель
— это двигатель ПОСТОЯННОГО ТОКА
без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
Устройство бесколлекторного двигателя:
Inrunner
(произносится как «инраннер»).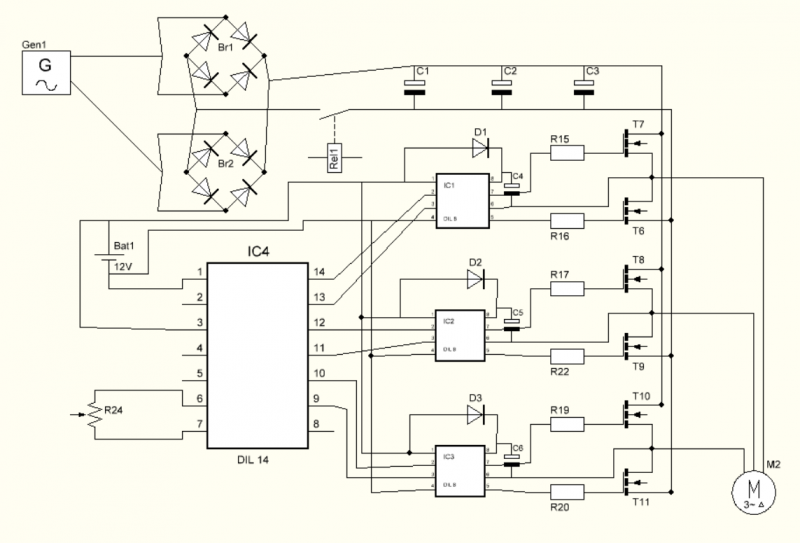 Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner
(произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами.
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток:
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.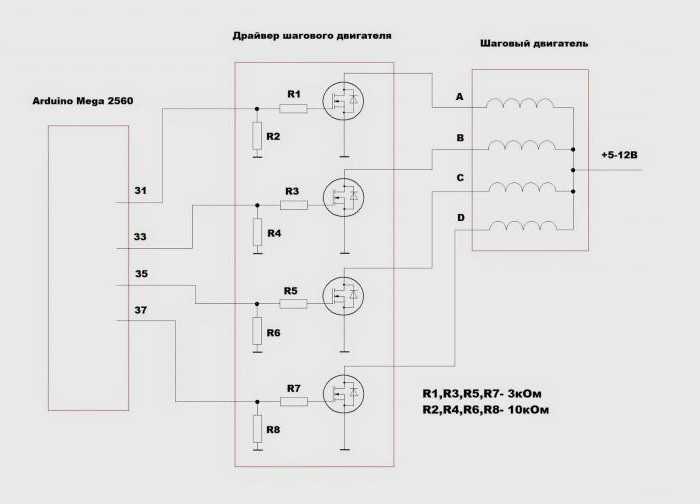
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки:)
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1. 73 раз. (впоследствии было выбрано соединение треугольник)
73 раз. (впоследствии было выбрано соединение треугольник)
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея.
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки:
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм.
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД – это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.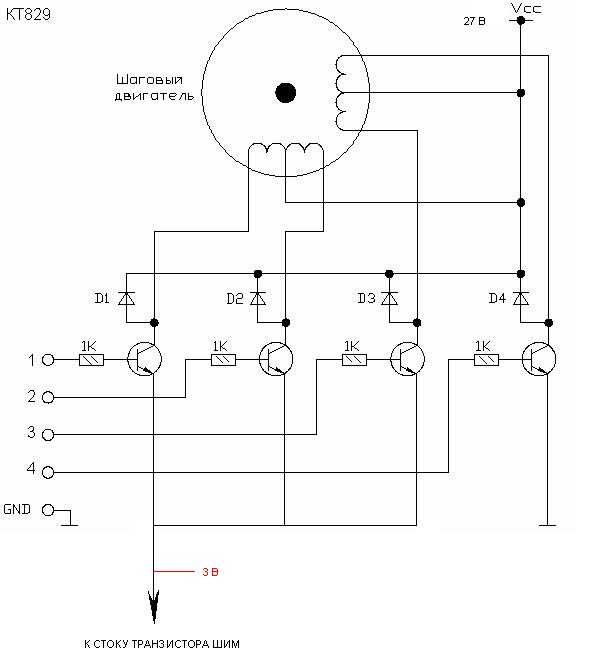
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.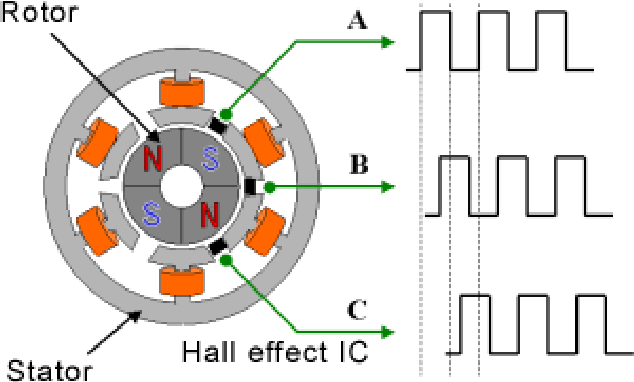
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне).
 Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm. - Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
 Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» – отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» – положительный, «А» – отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Наверняка задавался вопросом, чем же отличается такой двигатель от других двигателей, например от тех, что стоят в сверлильных станках. Двигатели, установленные в не очень мощных станках, обычно не искрят, и работают они не так шумно, как та же дрель, обладающая меньшей чем станок мощностью.
В чем же дело? Дело в том, что двигатель с щетками — это коллекторный двигатель, а двигатель без щеток — бесколлекторный
. Для решения разных задач подойдет свой тип двигателя — где-то лучше подойдет коллекторный, а где-то можно установить только бесколлекторный.
Для решения разных задач подойдет свой тип двигателя — где-то лучше подойдет коллекторный, а где-то можно установить только бесколлекторный.
Коллекторный двигатель
Двигатель коллекторный имеет, как правило, всего два провода питания, он прост в управлении, достаточно регулировать постоянное или переменное напряжение питания и обороты станут соответственно меняться. Управлять коллекторным двигателем можно даже при помощи нехитрого диммера. Главное достоинство коллекторного двигателя — высокие обороты (десятки тысяч в минуту) при высоком крутящем моменте.
Принцип работы коллекторного двигателя очень прост. По сути, ротор его представляет собой набор медных рамок в магнитопроводе, которые поочередно коммутируются к источнику питания на коллекторно-щеточном узле. Статор может быть как из постоянных магнитов, так и с обмоткой, питаемой от того же источника, что и ротор, или от отдельного источника, а иногда статор и ротор включены в единую последовательную цепь (как например двигатели стиральных машинок-автоматов).
На каждую из секций обмотки ротора, через коллекторно-щеточный узел, поочередно, в процессе вращения ротора, подается электрический ток, в результате ротор перемагничивается, приобретая четко выраженные северный и южный магнитные полюсы, благодаря которым и происходит вращение ротора внутри статора (полюсы ротора выталкиваются полюсами статора, затем ротор дальше перемагничивается и вновь выталкивается). Поскольку ротор каждый раз коммутируется к источнику питания очередной секцией, вращение не останавливается, пока на коллектор подается питание.
Основной недостаток коллекторного двигателя
Обороты коллекторного двигателя очень удобно регулировать, но когда они достаточно высоки, щетки дают о себе знать. Поскольку щетки все время плотно прилегают к коллектору, на высоких оборотах они быстро изнашиваются, со временем так или иначе засоряются, и в конце концов начинают искрить.
Износ щеток, и вообще коллекторно-щеточного узла, ведет к снижению эффективности коллекторного двигателя.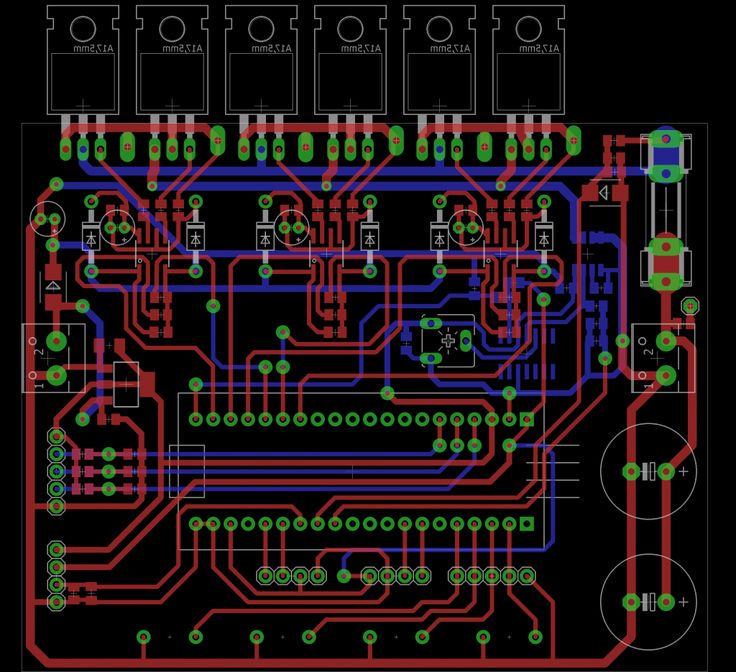 Таким образом, сам коллекторно-щеточный узел — это и есть главный недостаток коллекторных двигателей
Таким образом, сам коллекторно-щеточный узел — это и есть главный недостаток коллекторных двигателей
. Сегодня от коллекторных двигателей стараются отказываться в пользу бесщеточных шаговых.
У бесколлекторного двигателя нет ни коллектора, ни щеток. Простейший пример бесколлекторного двигателя — асинхронный трехфазный двигатель с ротором типа «беличья клетка». Еще один пример бесколлекторного двигателя — более современный — шаговый двигатель с магнитным ротором
. Обмотки статора бесколлекторного двигателя сами перемагничиваются так, чтобы ротор все время разворачивался и непрерывно таким образом вращался.
Чаще всего современные бесколлекторные двигатели оснащаются датчиком положения ротора, по сигналам с которого работает регулятор скорости вращения двигателя. Сигнал с датчика положения ротора передается на процессор более 100 раз в секунду, в результате получается точное позиционирование ротора и высокий крутящий момент. Бывают, конечно, бесколлекторные двигатели и без датчика положения ротора, яркий пример — тот же асинхронный трехфазный мотор. Моторы без датчика положения стоят дешевле чем с датчиком.
Моторы без датчика положения стоят дешевле чем с датчиком.
Достоинства бесколлекторных двигателей
Поскольку ресурс подшипников ротора крайне велик, можно сказать, что в бесколлекторном двигателе практически отсутствуют изнашиваемые со временем детали, и он вообще не требует обслуживания в процессе эксплуатации. Здесь сведено к минимуму трение, отсутствует проблема перегрева коллектора, в целом надежность и эффективность бесколлекторных двигателей очень высоки.
Нет искрящих щеток, датчик положения ротора поможет сделать управление точным, — недостатков практически нет, одни достоинства. Разве что цена качественных шаговых двигателей выше чем у коллекторных (плюс драйвер), но это ничто по сравнению с регулярной заменой пружин, щеток и коллекторов у коллекторных двигателей.
Бесколлекторные двигатели на сегодняшний день являются довольно распространенными. Применяются данные устройства чаще всего с электроприводами. Также их можно встретить на различном холодильном оборудовании. В промышленной сфере они задействованы в системах нагрева.
В промышленной сфере они задействованы в системах нагрева.
Дополнительно бесколлекторные модификации устанавливаются в обычные вентиляторы для кондиционирования воздуха. В наше время на рынке представлено множество моделей с датчиками и без них. При этом по типу регуляторов модификации довольно сильно отличаются. Однако чтобы разобраться в данном вопросе более подробно, необходимо изучить устройство простого двигателя.
Устройство бесколлекторной модели
Если рассматривать обычный трехфазный бесколлекторный двигатель, то катушка индуктивности у него устанавливается медного типа. Статоры используются как широтные, так и импульсные. Зубцы у них применяются разного размера. Как говорилось ранее, существуют модели с датчиками, а также без них.
Для фиксации статора используются колодки. Непосредственно процесс индукции происходит за счет обмотки статора. Роторы чаше всего применяются двухполюсного типа. Сердечники у них устанавливаются стальные. Для закрепления магнитов на моделях имеются специальные пазы. Непосредственно управление бесколлекторным двигателем происходит при помощи регуляторов, которые располагаются у статора. Для подачи напряжения на внешнюю обмотку в устройствах устанавливаются изолирующие затворы.
Непосредственно управление бесколлекторным двигателем происходит при помощи регуляторов, которые располагаются у статора. Для подачи напряжения на внешнюю обмотку в устройствах устанавливаются изолирующие затворы.
Двухразрядные модели
Безколлекторные эл. двигатели данного типа часто используются в морозильном оборудовании. При этом компрессоры для них подходят самые разнообразные. В среднем мощность модели способна достигать 3 кВт. Схема бесколлекторного двигателя катушки чаще всего включает двойного типа с медной обмоткой. Статоры устанавливаются только импульсные. В зависимости от производителя длина зубцов может меняться. Датчики используются как электрического, так и индуктивного типа. Для систем нагрева указанные модификации походят плохо.
Также следует учитывать, что сердечники в бесколлекторных двигателях встречаются в основном стальные. При этом пазы для магнитов используются довольно широкие, а расположены они очень близко друг к другу. За счет этого частотность у устройств может быть высокой.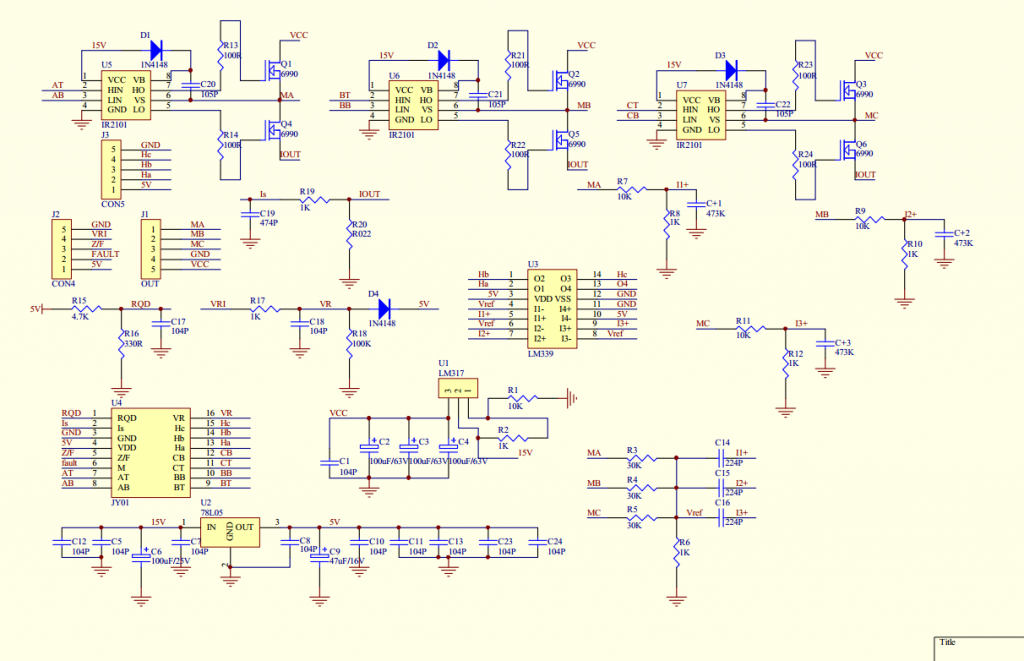 Регуляторы для таких модификаций подбираются чаще всего одноканального типа.
Регуляторы для таких модификаций подбираются чаще всего одноканального типа.
Трехразрядные модификации
Трехразрядный бесколлекторный двигатель отлично подходит для систем вентилирования. Датчики у него используются, как правило, электрического типа. При этом катушки устанавливаются довольно широкие. За счет этого процесс индукции осуществляется быстро. В данном случае частотность устройства зависит от статора. Обмотка у него чаще всего встречается медного типа.
Предельное напряжение трехразрядные бесколлекторные двигатели способны выдерживать на уровне 20 В. Тиристорные модификации в наше время встречаются довольно редко. Также следует отметить, что магниты в таких конфигурациях могут устанавливаться как на внешней, так и на внутренней стороне роторной пластины.
Четырехразрядные модификации своими руками
Сделать четырехразрядный бесколлекторный двигатель своими руками можно абсолютно просто. Для этого необходимо в первую очередь заготовить пластину с пазами. Толщина металла в данном случае должна составлять примерно 2.3 мм. Пазы в этой ситуации обязаны находиться на расстоянии в 1.2 см. Если рассматривать простую модель, то катушку следует подбирать диаметром в 3.3 см. При этом пороговое напряжение она обязана выдерживать на уровне 20 В.
Толщина металла в данном случае должна составлять примерно 2.3 мм. Пазы в этой ситуации обязаны находиться на расстоянии в 1.2 см. Если рассматривать простую модель, то катушку следует подбирать диаметром в 3.3 см. При этом пороговое напряжение она обязана выдерживать на уровне 20 В.
Колодки для устройства чаще всего подбираются стальные. В данном случае многое зависит от размеров роторной пластины. Непосредственно статор надо использовать с двойной обмоткой. При этом сердечник важно заготавливать стального типа. Если рассматривать модификации без регуляторов, то закончить сборку бесколлекторного двигателя можно установкой изолирующего затвора. При этом контакты устройства необходимо вывести на внешнюю сторону пластины. Для обычного вентилятора такие бесколлекторные модели подойдут идеально.
Устройства с регулятором АВР2
Бесколлекторный двигатель с регуляторами данного типа на сегодняшний день является весьма востребованным. Подходят указанные системы больше всего для приборов кондиционирования. Также они в промышленной сфере широко используются для холодильного оборудования. Они способны работать с электроприводами различной частотности. Катушки у них чаще всего устанавливаются двойного типа. При этом статоры можно встретить только импульсные. В свою очередь, широтные модификации являются не сильно распространенными.
Также они в промышленной сфере широко используются для холодильного оборудования. Они способны работать с электроприводами различной частотности. Катушки у них чаще всего устанавливаются двойного типа. При этом статоры можно встретить только импульсные. В свою очередь, широтные модификации являются не сильно распространенными.
Датчики в бесколлекторных двигателях с регуляторами данной серии используются только индуктивные. При этом частотность устройства можно отслеживать по системе индикации. Колодки, как правило, устанавливаются контактного типа, и крепиться они могут непосредственно на статорной пластине. Регулятор бесколлекторного двигателя в данном случае позволяет менять частотность довольно плавно. Происходит данный процесс за счет изменения параметра выходного напряжения. В целом эти модификации являются очень компактными.
Двигатели с регуляторами АВР5
Бесколлекторный двигатель с регулятором данной серии часто применяется в промышленной сфере для управления различными электроприборами. В бытовых устройствах он устанавливается довольно редко. Особенностью таких бесколлекторных модификаций можно назвать повышенную частотность. При этом параметр мощности у них менять просто. Катушки в данных модификациях встречаются самые разнообразные. Также следует отметить, что магниты чаще всего устанавливаются на внешней стороне роторной коробки.
В бытовых устройствах он устанавливается довольно редко. Особенностью таких бесколлекторных модификаций можно назвать повышенную частотность. При этом параметр мощности у них менять просто. Катушки в данных модификациях встречаются самые разнообразные. Также следует отметить, что магниты чаще всего устанавливаются на внешней стороне роторной коробки.
Затворы в основном используются изолированного типа. Монтироваться они могут как у статорной коробки, так и сердечника. В целом регулировка устройства происходит довольно быстро. Однако следует учитывать также и недостатки таких систем. В первую очередь они связаны с перебоями питания при низких частотах. Также важно упомянуть, что у моделей данного типа потребление электроэнергии довольно большое. При этом для управления интегральными электроприводами устройства не подходят.
Использование регуляторов АВТ6
Данного типа регулятор скорости бесколлекторного двигателя на сегодняшний день пользуется большим спросом. Отличительной его особенностью можно смело назвать универсальность. Устанавливаются регуляторы, как правило, на бесколлекторные двигатели, мощность которых не превышает 2 кВт. При этом для управления системами вентилирования указанные устройства подходят идеально. Контроллеры в данном случае могут устанавливаться самые разнообразные.
Устанавливаются регуляторы, как правило, на бесколлекторные двигатели, мощность которых не превышает 2 кВт. При этом для управления системами вентилирования указанные устройства подходят идеально. Контроллеры в данном случае могут устанавливаться самые разнообразные.
Скорость передачи сигнала в данном случае зависит от типа системы управления. Если рассматривать тиристорные модификации, то они обладают довольно высокой проводимостью. При этом проблемы с магнитными помехами у них возникают редко. Самостоятельно собрать модель данного типа довольно сложно. В этой ситуации затворы чаще всего подбираются неизолированные.
Модели с датчиками Холла
Бесколлекторные двигатели с датчиками Холла широко используются в приборах нагрева. При этом подходят они для электроприводов различного класса. Непосредственно регуляторы используются только одноканальные. Катушки в устройстве устанавливаются медного типа. При этом величина зубцов модели зависит исключительно от производителя. Непосредственно колодки для устройств подбираются контактного типа. На сегодняшний день датчики чаще всего устанавливаются со стороны статора. Однако на рынке представлены также модели с нижним их расположением. В таком случае габариты бесколлекторного двигателя будут немного большими.
Непосредственно колодки для устройств подбираются контактного типа. На сегодняшний день датчики чаще всего устанавливаются со стороны статора. Однако на рынке представлены также модели с нижним их расположением. В таком случае габариты бесколлекторного двигателя будут немного большими.
Низкочастотные модификации
Низкочастотный бесколлекторный двигатель на сегодняшний день активно используется в промышленной сфере. При этом для морозильных камер он подходит идеально. В среднем параметр полезного действия у него находится на уровне 70%. Затворы у моделей чаще всего используются с изоляторами. При этом тиристорные модификации в наше время встречаются довольно часто.
Системы управления используются серии АВР. При этом частотность модели зависит от типа сердечника и не только. Также следует учитывать, что существуют модели с двойными роторами. В данном случае магниты располагаются вдоль пластины. Статоры чаще всего используются с медной обмоткой. При этом низкочастотные бесколлекторные двигатели с датчиками встречаются очень редко.
Высокочастотные двигатели
Указанные модификации наиболее востребованными считаются для резонансных электроприводов. В промышленности такие модели встречаются довольно часто. Датчики у них устанавливаются как электронного, так индуктивного типа. При этом катушки чаще всего имеются на внешней стороне пластины. Роторы монтируют как в горизонтальном, так и вертикальном положении.
Непосредственно изменение частотности у таких устройств осуществляется через контроллеры. Устанавливаются они, как правило, со сложной контактной системой. Непосредственно стартеры используются только двойного типа. В свою очередь, системы управления зависят от мощности бесколлекторного устройства.
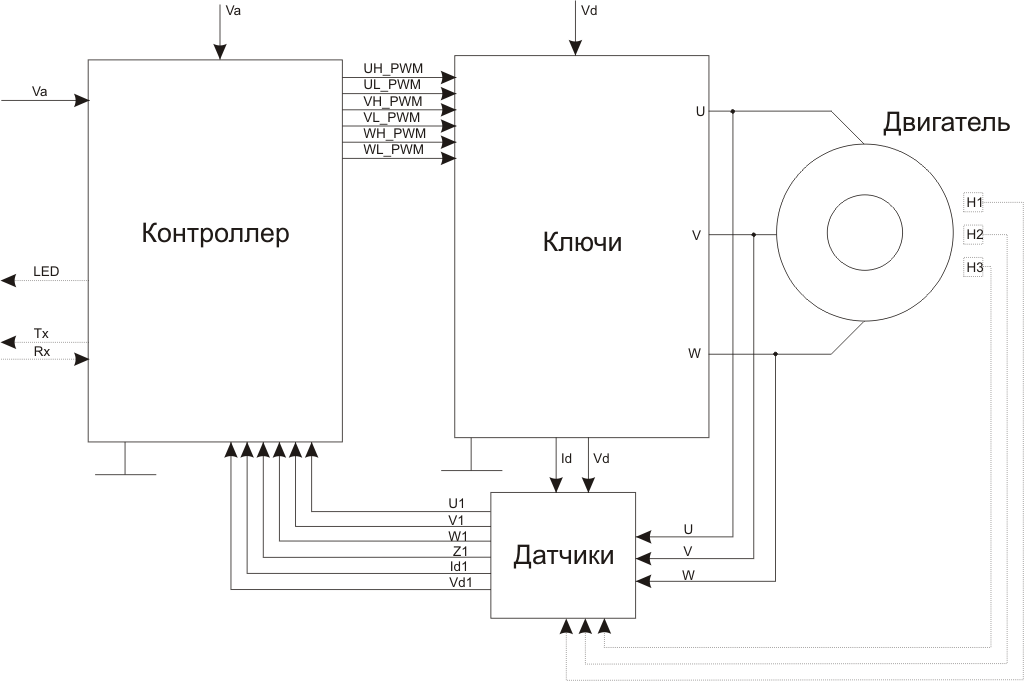
Управление бесколлекторным двигателем схема
Данная статья сфокусирована на применении микроконтроллера с минимальными ресурсами для управления вентильным двигателем и скорости его вращения. Как микроконтроллер может управлять трехфазным БДПТ двигателем? Для того, чтобы ответить на этот вопрос требуется, чтобы были определены ресурсы микросхемы, которые в данном приложении будут взаимодействовать с внешней топологией и функциями управления двигателя БДПТ.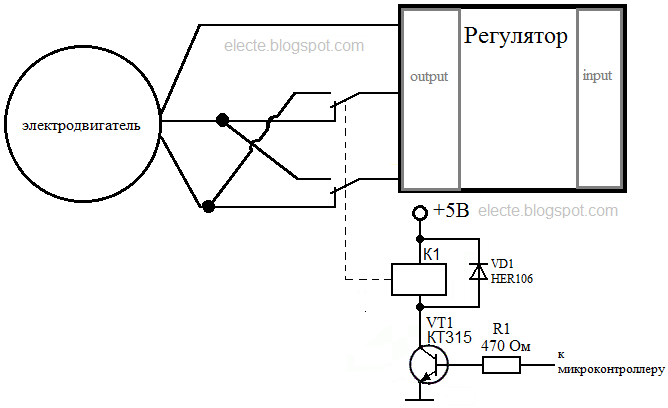 Существуют сенсорные и безсенсорные конфигурации двигателей для определения положения ротора , которые имеют свои за и против.
Существуют сенсорные и безсенсорные конфигурации двигателей для определения положения ротора , которые имеют свои за и против.
Поиск данных по Вашему запросу:
Управление бесколлекторным двигателем схема
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Бесколлекторный двигатель постоянного тока
- Блок управления бесколлекторным двигателем BLSD
- Контроллер трехфазного бесколлекторного двигателя постоянного тока с минимальными ресурсами
- Бесколлекторный электродвигатель — что это такое?
- Драйверы от TI: Управляй любым электродвигателем
- Драйверы от TI: Управляй любым электродвигателем
- Бесколлекторные двигатели со встроенным блоком управления FL42BLS-IE
- Что такое бесколлекторный двигатель постоянного тока и его принцип работы
- Управление бесколлекторными двигателями
- AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Мотор колесо & СИНУС. Пример для STM32
Пример для STM32
Бесколлекторный двигатель постоянного тока
Бесколлекторные моторы рис. При этом конструкция двигателя проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Поэтому они практически не изнашиваются.
Двигатели inrunner имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Двигатели outrunner имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами.
Коммутация в бесколлекторном двигателе БД осуществляется и контролируется с помощью электроники. Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору.
Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды.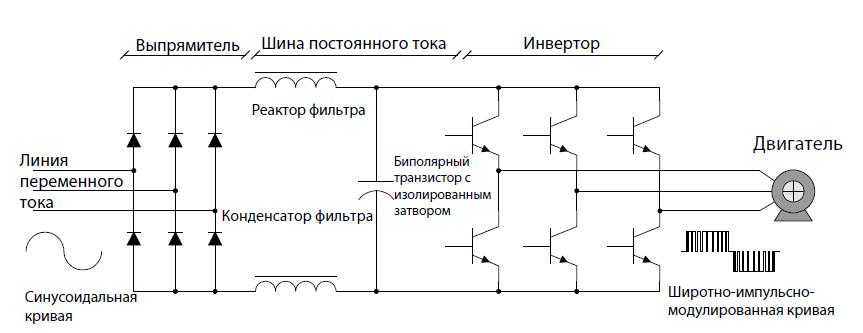 Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно. За переключением фаз следит микроконтроллер регулятора.
Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно. За переключением фаз следит микроконтроллер регулятора.
Функциональная схема ESC регулятора показана на рис. Схема подключения бесколлекторного двигателя с ESC-регулятором к плате Arduino показана на рис.
Для подключения регулятора к плате Arduino используется 2 провода:. Подключение бесколлекторного двигателя с ESC-регулятором к плате Arduino. Для управления регулятором будем использовать Arduino-библиотеку Servo. Минимальные и максимальные значения управляющего сигнала мксек и мксек. После загрузки скетча на плату Arduino видим что мотор не запускается и не реагирует на повороты потенциометра. Регулятор необходимо откалибровать, чтобы он знал минимальные и максимальное значения.
Для этого перед подачей питания на регулятор, выставляем потенциометр в максимальное значение. Подаем питание. Слышим «пиканье» двигателя. Переводим потенциометр в минимальное значение, слышим 3 «пика». Регулятор откалиброван. Теперь поворотом потенциометра можем регулировать скорость двигателя. В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino.
Регулятор откалиброван. Теперь поворотом потенциометра можем регулировать скорость двигателя. В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino.
Нам потребуются следующие компоненты:. Для калибровки в процедуре setup производим эмуляцию перевода потенциометра м максимальное и минимальное положение. Содержимое скетча показано в листинге 2. После запуска Arduino в процедуре setup происходит калибровка регулятора, и в процедуре loop мотор крутится со скоростью, соответствующей положению потенциометра. База знаний. Вконтакте Instagram YouTube. Бесколлекторные моторы. Обзор бесколлекторных двигателей, подключение и пример использования одного из них.
К сожалению, раздел пуст В данный момент нет активных товаров. Содержание Обзор Подключение к Arduino Пример использования Часто задаваемые вопросы Обзор бесколлекторных моторов для Arduino Бесколлекторные моторы рис.
ESC регуляторы Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для подключения регулятора к плате Arduino используется 2 провода: черный — «земля; белый — управляющий. Показания потенциометра будем использовать для управления скоростью мотора. Подключение бесколлекторного двигателя с ESC-регулятором к плате Arduino Для управления регулятором будем использовать Arduino-библиотеку Servo.
Для подключения регулятора к плате Arduino используется 2 провода: черный — «земля; белый — управляющий. Показания потенциометра будем использовать для управления скоростью мотора. Подключение бесколлекторного двигателя с ESC-регулятором к плате Arduino Для управления регулятором будем использовать Arduino-библиотеку Servo.
Содержимое скетча представлено в листинге 1. Листинг 1. Пример использования В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino. Листинг 2. Часто задаваемые вопросы 1. Проведите калибровку ESC-регулятора. Назад к списку Следующий проект. Услуги 3D печать Ремонт 3D принтеров. Блог 3D-печать 3D-принтеры.
Контакты Как до нас добраться.
Блок управления бесколлекторным двигателем BLSD
Преимущества бесколлекторных двигателей по сравнению с бензиновыми двигателями. Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока. Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками.
Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками.
Примером бесколлекторного двигателя-маховика постоянного тока, Так как напряжения датчиков Холла пропорциональны возбуждающему их току управления то Конструктивная схема двигателя-маховика показана на рис.
Контроллер трехфазного бесколлекторного двигателя постоянного тока с минимальными ресурсами
Бесколлекторные моторы рис. При этом конструкция двигателя проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Поэтому они практически не изнашиваются. Двигатели inrunner имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Двигатели outrunner имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами.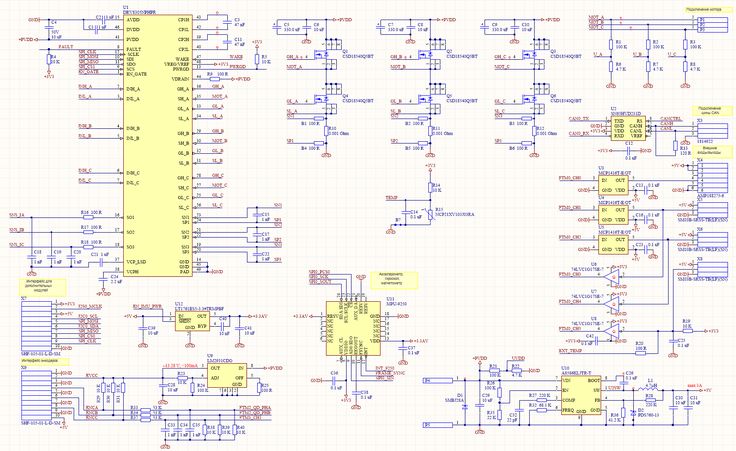 Коммутация в бесколлекторном двигателе БД осуществляется и контролируется с помощью электроники. Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды. Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно.
Коммутация в бесколлекторном двигателе БД осуществляется и контролируется с помощью электроники. Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды. Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно.
Бесколлекторный электродвигатель — что это такое?
Хочу им управлять с помощью ардуино. Но главное пока просто его запустить от розетки. У меня волосы дыбом встали когда я узнал что такое бесколлекторные надеюсь правильно написал двигатели и способы их управления. Это очень сложно, засим и прошу помощи. Думаю можно распаять заводскую схему управления кондиционером, но я не знаю вообще не шарю как.
На роторе бесколлекторного двигателя установлены постоянные магниты,.
Драйверы от TI: Управляй любым электродвигателем
Информацию о положении ротора электродвигателя можно передавать магнитным полем, используя для этого гальваномагнитные приборы, например магнитодиоды, или датчики Холла. Однако использование датчиков Холла приводит к усложнению конструкции электродвигателя, так как для формирования крутого фронта импульсов датчика положения датчики Холла должны быть расположены в специальном магнитопроводе с отдельным магнитом. Очень малкй к. Значительная зависимость параметров гальваномагнитных приборов от температуры резко уменьшает температурный диапазон работы электродвигателя. Тем не менее свойство датчиков Холла реагировать на знак и величину магнитного поля, на полярность питающего напряжения, а также практически неограниченное время работы определяют в некоторых случаях целесообразность их применения.
Однако использование датчиков Холла приводит к усложнению конструкции электродвигателя, так как для формирования крутого фронта импульсов датчика положения датчики Холла должны быть расположены в специальном магнитопроводе с отдельным магнитом. Очень малкй к. Значительная зависимость параметров гальваномагнитных приборов от температуры резко уменьшает температурный диапазон работы электродвигателя. Тем не менее свойство датчиков Холла реагировать на знак и величину магнитного поля, на полярность питающего напряжения, а также практически неограниченное время работы определяют в некоторых случаях целесообразность их применения.
Драйверы от TI: Управляй любым электродвигателем
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов — это далеко не полный перечень областей применения бесколлекторных двигателей БД постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.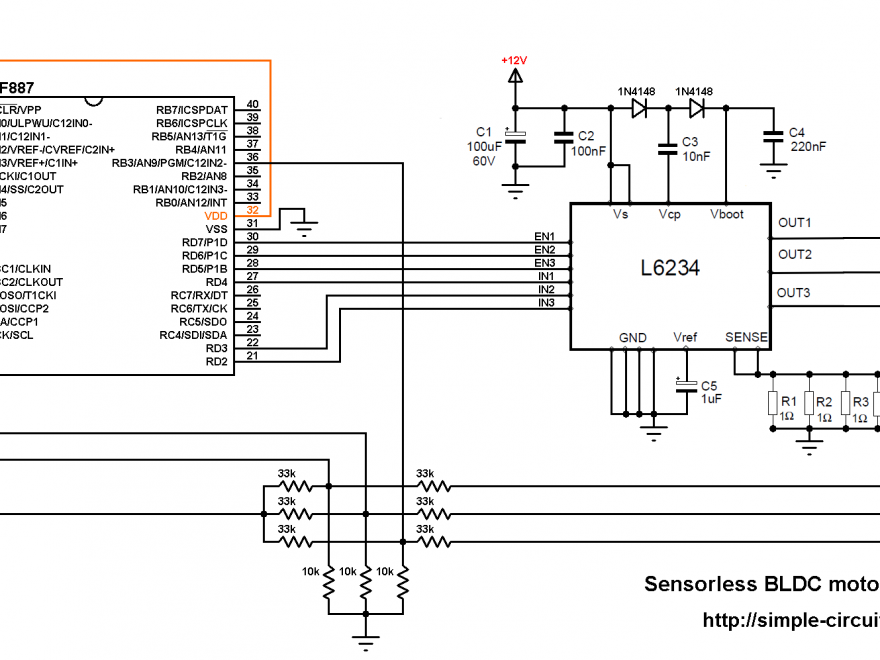 Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2. Как видите, конструкция представляет собой ротор якорь и статор, на первом имеется постоянный магнит или несколько магнитов, расположенных в определенном порядке , а второй оборудован катушками В для создания магнитного поля. Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем именно такой тип конструкции можно увидеть на рисунке 2 , так и внешним см. Соответственно, каждая из конструкций имеет определенную сферу применения.
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2. Как видите, конструкция представляет собой ротор якорь и статор, на первом имеется постоянный магнит или несколько магнитов, расположенных в определенном порядке , а второй оборудован катушками В для создания магнитного поля. Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем именно такой тип конструкции можно увидеть на рисунке 2 , так и внешним см. Соответственно, каждая из конструкций имеет определенную сферу применения.
Brushless controller schematic mc Принципиальная Схема, Управление бесколлекторным двигателем постоянного тока(IR) Ардуино.
Бесколлекторные двигатели со встроенным блоком управления FL42BLS-IE
Управление бесколлекторным двигателем схема
Запросить склады. Перейти к новому. Управление бесколлекторным двигателем.
Что такое бесколлекторный двигатель постоянного тока и его принцип работы
ВИДЕО ПО ТЕМЕ: Бесколлекторный электродвигатель своими руками
Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора. Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока БДПТ эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера , за счет действия этой силы и образуется крутящий момент на валу электрических машин.
Двигателем постоянного тока называют электрический двигатель, питание которого обеспечивает постоянный ток. При необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами.
При необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами.
Управление бесколлекторными двигателями
Изобретение относится к бесколлекторным двигателям постоянного тока. Технический результат заключается в разработке схемы автоматического управления бесколлекторным двигателем, обеспечивающей режимы перестраиваемой стабилизированной скорости вращения двигателя и устойчивую его работу при запуске и колебаниях нагрузочного момента. Поставленная цель достигается тем, что в устройство автоматического управления двигателем, содержащее датчик положения ротора, регулятор длительности импульсов, электронный коммутатор и цепь обратной связи, в цепь обратной связи введены схема сравнения, формирователь напряжения установки, регулятор глубины обратной связи и интегратор, а выходы цепи обратной связи подсоединены к входам введенных в регулятор длительности импульсов компараторов, выходы которых через детекторы подключены к входам электронного коммутатора якорных обмоток двигателя. Изобретение относится к области средств автоматизации и робототехники и может быть использовано как в этих областях, так и в ряде других, где в качестве исполнительного элемента применяются управляемые бесколлекторные двигатели. Регистрация патентов.
Изобретение относится к области средств автоматизации и робототехники и может быть использовано как в этих областях, так и в ряде других, где в качестве исполнительного элемента применяются управляемые бесколлекторные двигатели. Регистрация патентов.
AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3
Высокопроизводительное AVR-ядро микроконтроллера, которое содержит контроллер силового каскада, позволяет реализовать устройство управления высокоскоростным бесколлекторным электродвигателем постоянного тока. В данном документе дается короткое описание принципа действия бесколлекторного электродвигателя постоянного тока, а в деталях рассматривается управление БКЭПТ в сенсорном режиме, а также приводится описание принципиальной схемы опорной разработки ATAVRMC , на которой основаны данные рекомендации по применению. Обсуждается также программная реализация с программно-реализованным контуром управления на основе ПИД-регулятора.
Бесколлекторный двигатель схема управления датчик холла
Принцип работы электрического двигателя:В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент.
Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент.
Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
Устройство электрического двигателя:Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель
— это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
Устройство бесколлекторного двигателя:Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами.
Принцип работы:Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе.
Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной.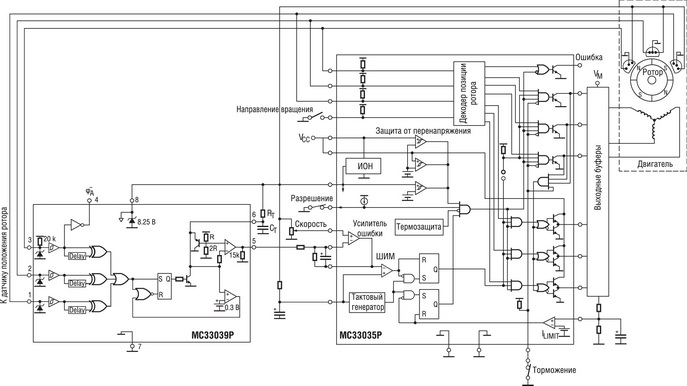 Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке.
Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке.
По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток:Регулятор скорости бесколлекторного двигателя:Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:1) Определять начальное положение ротора для запуска электродвигателя2) Управлять электродвигателем на низких скоростях3) Разгонять электродвигатель до номинальной (заданной) скорости вращения4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
- Достоинства и недостатки бесколлекторных двигателей:Достоинства:
- Недостатки:
- Список материалов и оборудования:
- Ход работы:1) С самого начала решаем:
-Частота вращения изменяется в широком диапазоне-Возможность использования во взрывоопасной и агрессивной среде-Большая перегрузочная способность по моменту-Высокие энергетические показатели (КПД более 90 %)-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов-Относительно сложная система управления двигателем-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.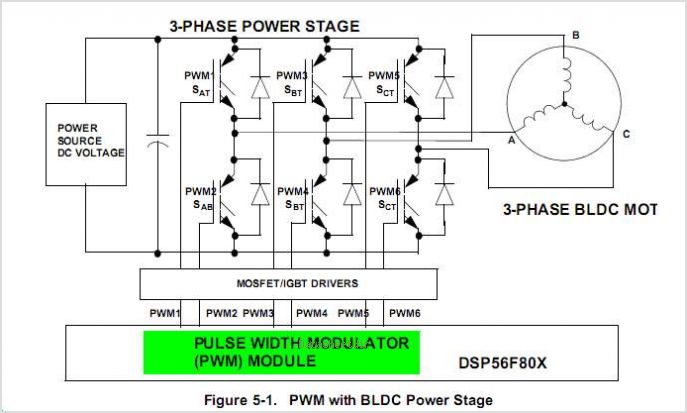 1) Проволока (взятая из старых трансформаторов)2) Магниты (купленные в интернете)3) Статор (барашек)4) Вал5) Подшипники6) Дюралюминий 7) Термоусадка 8) Доспуп к неограниченному техническому хламу9) Доступ к инструментам10) Прямые руки 🙂 Для чего делаем двигатель? На что он должен быть рассчитан? В чем мы ограничены? В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя.
1) Проволока (взятая из старых трансформаторов)2) Магниты (купленные в интернете)3) Статор (барашек)4) Вал5) Подшипники6) Дюралюминий 7) Термоусадка 8) Доспуп к неограниченному техническому хламу9) Доступ к инструментам10) Прямые руки 🙂 Для чего делаем двигатель? На что он должен быть рассчитан? В чем мы ограничены? В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя.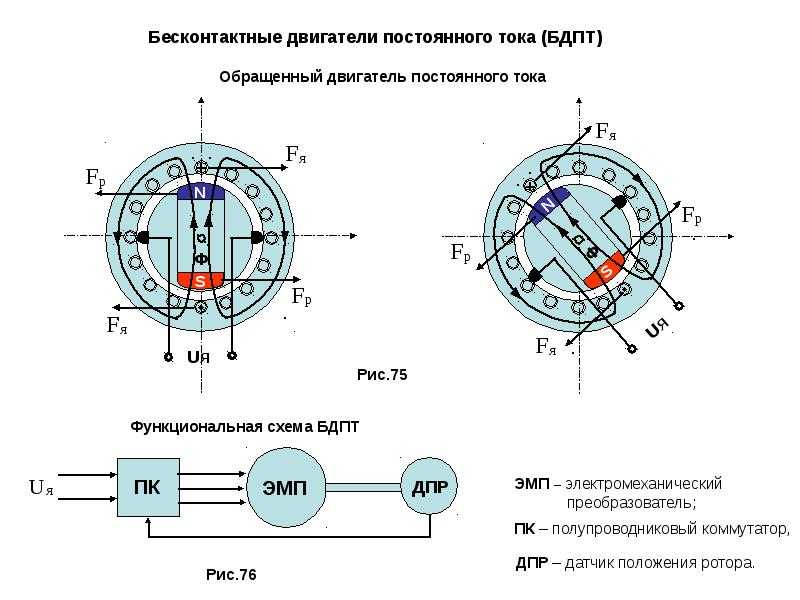 Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения: 1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм 3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения: 1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм 3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение. 4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник) 5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея.
Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея.
- Характеристики полученного двигателя:
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки:В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм. Потребляемый ток: 34.1АТок холостого хода: 2.1АСопротивление обмоток: 0.02 ОмКоличество полюсов: 14Обороты: 8400 об/мин Видеоотчет испытания двигателя на самолете… Мягкой посадки 😀
- Выводы:
- Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
- Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)
 Удачи всем)
Удачи всем)Расчет КПД двигателя:Очень хороший показатель… Хотя можно было еще выше добиться…1) У бесколлекторных двигателей высокая эффективность и КПД2) Бесколлекторные двигатели компактны3) Бесколлекторные двигатели можно использовать во взрывоопасных средах4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Бесколлекторные двигатели bldc
Бесколлекторные двигатели постоянного тока (BLDC — Brushless DC electric motor) часто используется в мотор-колесе электросамокатов и электровелосипедов. Его первые версии появились в 1960-х годах. Двигатели BLDC намного эффективнее и имеют гораздо больший крутящий момент.
Размещение постоянного магнита в роторе (внутренняя конфигурация) и управление окружающими катушками через транзисторы, позволило устранить самый важный недостаток щеточных (коллекторных) двигателей постоянного тока, которым являются сами щетки.
В альтернативной конфигурации (внешний ход) катушки якоря могут образовывать твердый сердечник, вокруг которого вращается ротор с постоянным магнитом, приводящий в движение вал двигателя. В обоих случаях катушки неподвижны.
В обоих случаях катушки неподвижны.
Двигатели BLDC считаются двигателями с электронной коммутацией (ECM) в отличие от щеточных двигателей с механической коммутацией.
Общий принцип управления двигателем BLDC
Для двигателей BLDC требуются современные электронные контроллеры, которые могут определять положение ротора.
Для этой цели можно использовать датчик Холла, реагирующий на положение каждой из катушек якоря при работающем двигателе.
Скорость двигателя BLDC больше не может регулироваться напряжением, как в щеточных двигателях, а только путем изменения частоты переключения. Эти двигатели питаются от сигнала ШИМ, как показано на рисунке.
Двигатели BLDC делятся на 1-фазные, 2-фазные и 3-фазные, но принцип работы является общим для всех типов. Вместо механического коммутатора, изменяющего направление магнитного поля катушек ротора, используются транзисторы, которые непрерывно изменяют фазу напряжения подаваемого на катушку статора, что заставляет ротор непрерывно вращаться.
Однофазные бесколлекторные (бесщеточные) двигатели используются в устройствах с низким энергопотреблением, в то время как двухфазные чаще в устройствах средней мощности. Типичные области применения 3-фазных двигателей — устройства чтения компакт-дисков.
Управление однофазными двигателями BLDC
Однофазные двигатели BLDC имеют две параллельные обмотки якоря, управляемые напряжением ШИМ через мост H.
Выходной сигнал одного датчика Холла постоянно меняет полярность тока, протекающего через обмотку якоря, таким образом поддерживая непрерывное вращение ротора. Однофазные двигатели BLDC очень просты в управлении.
Для их работы достаточно одной интегральной микросхемы, например LB11970RV (однофазный двухполупериодный драйвер).
Принцип управления однофазным двигателем BLDC
Управление двухфазными двигателями BLDC
Двухфазные двигатели немного сложнее в управлении. Якорь состоит из 4 катушек, а магнитное поле создается 4 парами постоянных магнитов.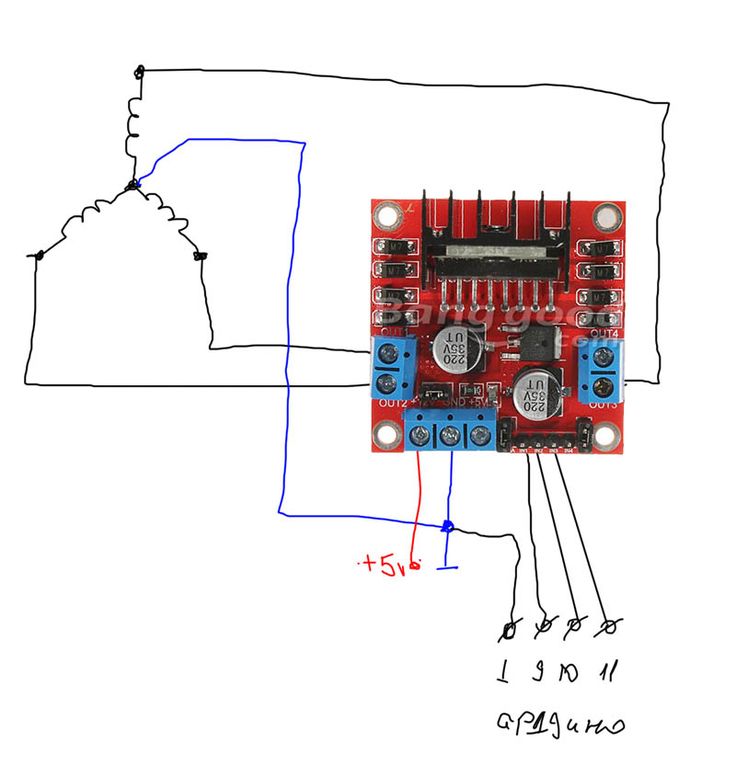 Катушки якоря сгруппированы попарно, поэтому двухфазные двигатели имеют больший крутящий момент, чем однофазные.
Катушки якоря сгруппированы попарно, поэтому двухфазные двигатели имеют больший крутящий момент, чем однофазные.
Двухфазные двигатели обычно используются в некритических низкоуровневых устройствах, таких как большие вентиляторы, поэтому там не требуются сложные контроллеры. В результате двухфазные двигатели мощнее и дешевле. Драйверы, такие как например LB1668M, могут использоваться для их управления.
Управление 3-фазными двигателями BLDC
Трехфазные двигатели BLDC имеют 3 катушки якоря, соответствующие 6 состояниям коммутации. В каждую из катушек обычно помещают датчики Холла, которые реагируют на прохождения над ними постоянных магнитов, которые являются элементами ротора. Принцип использования сигналов от датчиков Холла показан на рисунке.
Конструкция двигателя BLDC с датчиками Холла
Тут тоже сигналы от датчиков Холла определяют моменты переключения. Эти сигналы через соответствующую систему подключения включают транзисторы, которые напрямую управляют катушками двигателя.
Конечно, переключение в трехфазных двигателях происходит в 3 раза быстрее, чем в однофазных. Это приводит к снижению вибрации (дёргания) и более точному контролю скорости.
Примером трехфазного драйвера двигателя BLDC с датчиками Холла является микросхема LB1976.
Принцип управления мотором BLDC с использованием датчиков Холла
Двигателями также можно управлять без датчиков Холла, используя сигнал BEMF (Back EMF) от каждой катушки. Этот сигнал получается путем сравнения напряжения, индуцированного в каждой из трех катушек, с центральным напряжением (точка COM). Результат такой связи усиливается и передается в систему определения положения ротора.
Сигналы от трех катушек преобразуются в формы импульсов, сдвинутых друг относительно друга на 120 °.
Некоторые контроллеры используют простые компараторы для определения фазы каждой обмотки, другие требуют использования внешних микроконтроллеров.
Трехфазный интегрированный бессенсорный контроллер LB11983 включает в себя датчик положения ротора со схемами запуска, синхронизации, переключения, тепловой защиты и контроля насыщения и не требует внешнего микроконтроллера.
Принцип управления двигателем BLDC с помощью сигнала BEMF
Драйверы двигателей BLDC, использующие сигналы BEMF, имеют проблему с определением положения ротора во время запуска, потому что эти сигналы еще не генерируются.
В этом случае двигатель запускается с неизвестного положения, то есть неизвестно положение статора относительно ротора.
Это положение необходимо быстро распознать во время работы, потому что включение неправильной фазы может изменить направление вращения двигателя и даже сделать невозможной работу.
Форум
Форум по обсуждению материала Бесколлекторные двигатели bldc
Управление бесколлекторным двигателем с датчиками Холла (Sensored brushless motors)
| Главная | Контакты | Настройки | СМЕНИТЬ ПАЛИТРУ: |
Главная > Отдых > Хобби > Радиоуправляемые модели > Бесколлекторный двигатель
Мы уже ознакомились с устройством бесколлекторного двигателя и теперь разберемся, как ним управлять.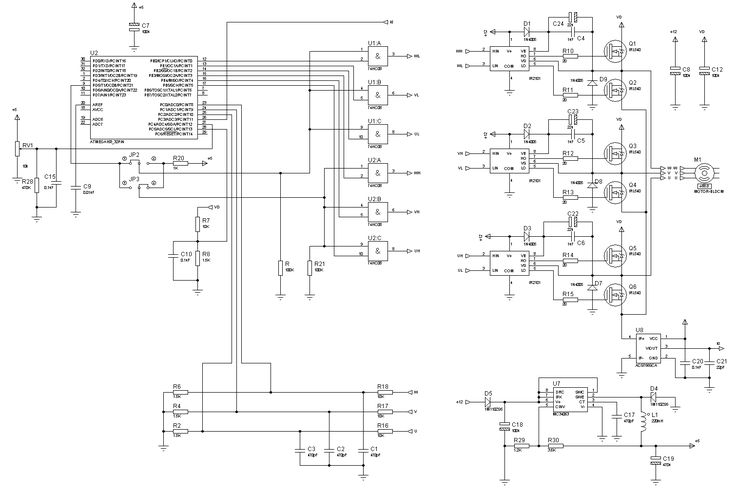
Мостовая схема ключей
Двигатель имеет три вывода (три фазы) на которые нам придется подавать в разные моменты времени «+» или «-» питания. Это реализуется с помощью электронных ключей, включенных по мостовой схеме:
Замыкая ключ SW1 подаем «+» на фазу А, а замыкая SW6 подаем «-» на фазу С. Таким образом, ток потечет от «+» батареи через фазы А и С. Для обеспечения обратного направления, открываем SW5 и SW2.
В этом случае ток потечет от «+» батареи через фазы С и А в обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний ключ и один нижний ключ.
При смене состояния нужно сразу выключить пару ключей, выждать время, необходимое для закрытия ключей, и только после этого включить другую пару ключей.
Диаграмма включения ключей
Напряжение на обмотки нужно подавать в зависимости от положения двигателя. Рассмотрим управление двигателем, где в качестве датчиков положения используются датчики Холла. Всего используют 3 датчика с дискретными выходами. Ниже приведена схема, согласно которой нужно подавать напряжение на обмотки в зависимости от сигналов с датчиков.
Рассмотрим управление двигателем, где в качестве датчиков положения используются датчики Холла. Всего используют 3 датчика с дискретными выходами. Ниже приведена схема, согласно которой нужно подавать напряжение на обмотки в зависимости от сигналов с датчиков.
Временная диаграмма:
Таблица включения ключей в зависимости от сигналов датчиков Холла:
Анимированная демонстрация работы 4 полюсного двигателя:
Шим (pwm), частота, переходные процессы
При включении ключей, как показано выше, на двигатель подается полное напряжение питания. При этом двигатель развивает максимальные обороты (мощность). Чтобы обеспечить управление двигателем нужно регулировать напряжение питания двигателя.
Изменение действующего напряжения осуществляется с помощью широтно-импульсной модуляции (ШИМ). Т.е. ключи открыты не все время, а открываются, и закрываются с фиксированной частой, но изменяемой скважностью:
Таким образом, изменяется действующее напряжение от нулевого до напряжения питания. Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ на сигналы, подаваемые на ключи. Это можно реализовать, например, такой схемой:
Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ на сигналы, подаваемые на ключи. Это можно реализовать, например, такой схемой:
Некоторые микроконтроллеры могут аппаратно формировать ШИМ сигнал на нескольких своих выводах. Можно формировать ШИМ для каждого из ключей программно. В этом случае схему можно упростить, и не использовать логических элементов. Частота ШИМ сигнала обычно бывает от 4 до 80 килогерц.
Во время включения и выключения ключей происходят переходные процессы, вследствие чего на ключах выделяется дополнительное тепло. Чем выше частота ШИМ сигнала, тем больше количество переходных процессов за единицу времени, и тем выше потери на ключах. Слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования.
В случае с двигателями без датчиков, которые будут рассматриваться в следующих статьях, выбор частоты ШИМ сигнала играет очень важную роль.
Потери на ключах
- Для уменьшения потерь вследствие переходных процессов на ключах ШИМ сигнал можно подавать только на нижние или только на верхние ключи. Прямые потери на ключах (без учета переходных процессов) можно рассчитать по формуле:
- P=R*I2
- где:
- P — теряемая мощность, которая выделяется в виде тепла
R — прямое сопротивление открытого ключа
I — ток, протекаемый через ключ.
 Прямые потери на ключах (без учета переходных процессов) можно рассчитать по формуле:
Прямые потери на ключах (без учета переходных процессов) можно рассчитать по формуле:Очевидно, что чем меньше сопротивление ключей, тем меньше потери на ключах. Уменьшение сопротивления ключей ведет к повышению общего КПД и уменьшению тепловыделения на ключах.
Уровень потерь на ключах имеет квадратичную зависимость от тока. Уменьшить ток, сохранив при этом общую мощность, можно повысив напряжение питания двигателя. В качестве примера рассмотрим два варианта:
1. Питание: 50В, ток: 100А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 1002 = 10 Вт
2. Питание: 100В, ток: 50А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 502 = 2,5 Вт
Т.е. снизив ток вдвое потери на ключах падают в 4 раза.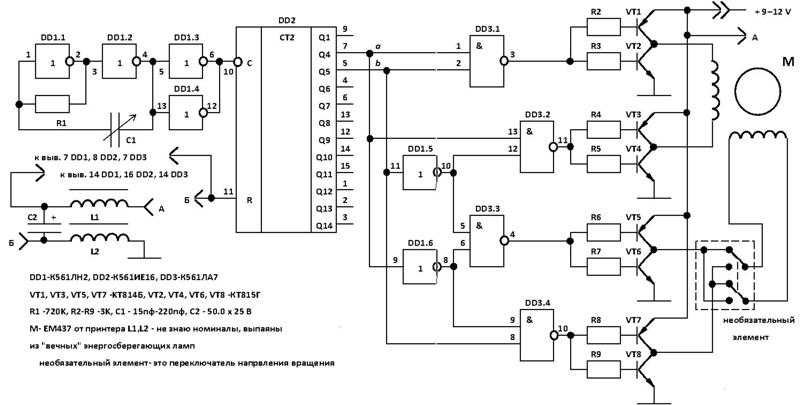
Угол опережения фаз (timing)
При приложении напряжения к обмотке двигателя, ток в обмотке не может вырасти мгновенно, поскольку обмотка двигателя представляет собой индуктивность. От момента подачи напряжения до достижения тока максимального значения пройдет некоторое время.
Аналогично при снятии напряжения понадобится некоторое время пока ток будет уменьшаться до нуля. Это время зависит от индуктивности обмотки двигателя и других конструктивных особенностей двигателя.
Таким образом, действие обмотки двигателя несколько запаздывает за управляющим сигналом.
Чтобы компенсировать эту задержку управляющий сигнал на ключи подают с опережением. Опережение управляющего сигнала выражают в угле опережения. Угол опережения может быть от 0 до 30 градусов. Речь идет об электрических градусах (см.
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя). Угол опережения может отличаться для каждой модели двигателя.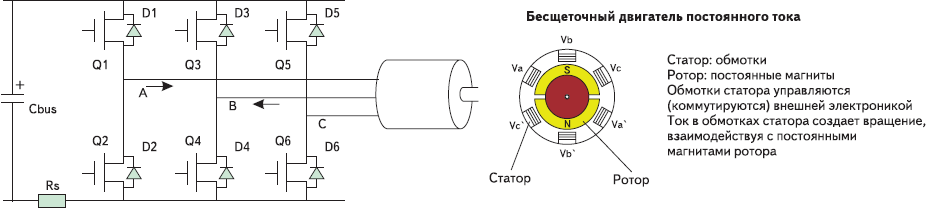 Точность установки угла опережения сильно влияет на работу высоко-оборотистых двигателей.
Точность установки угла опережения сильно влияет на работу высоко-оборотистых двигателей.
На малых скоростях точность установки угла опережения не столь критична.
Настройка угла опережения (timing) выполняется либо перемещением датчиков (некоторые двигатели оборудованы специальным приспособлением) либо корректируется программно средствами регулятора. Если двигатель имеет реверсивный режим (должен обеспечивать вращение в обе стороны), разумнее прибегнуть к программному методу.
Для лучшего понимания смысла угла опережения можно провести аналогию с двигателем внутреннего сгорания, где после подачи искры проходит некоторое время до воспламенения топлива. За это время вал двигателя успевает провернуться на некоторый угол. Для компенсации такой задержки устанавливают угол опережения зажигания.
Материал взят с сайта: http://www.avislab.com/blog/brushless03/ Главная > Отдых > Хобби > Радиоуправляемые модели > Бесколлекторный двигатель
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, применение
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения.
Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д.
Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Бесколлекторный двигатель в компьютерном дисководе
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Фазы работы бесколлекторного привода
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа.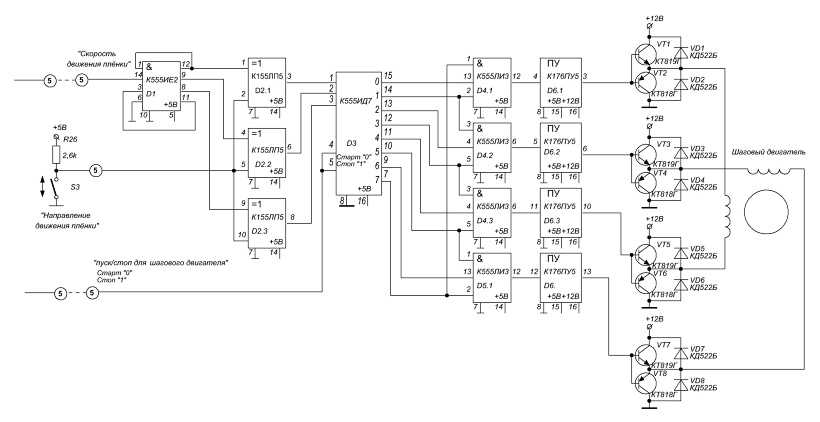 Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению.
То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность.
Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла.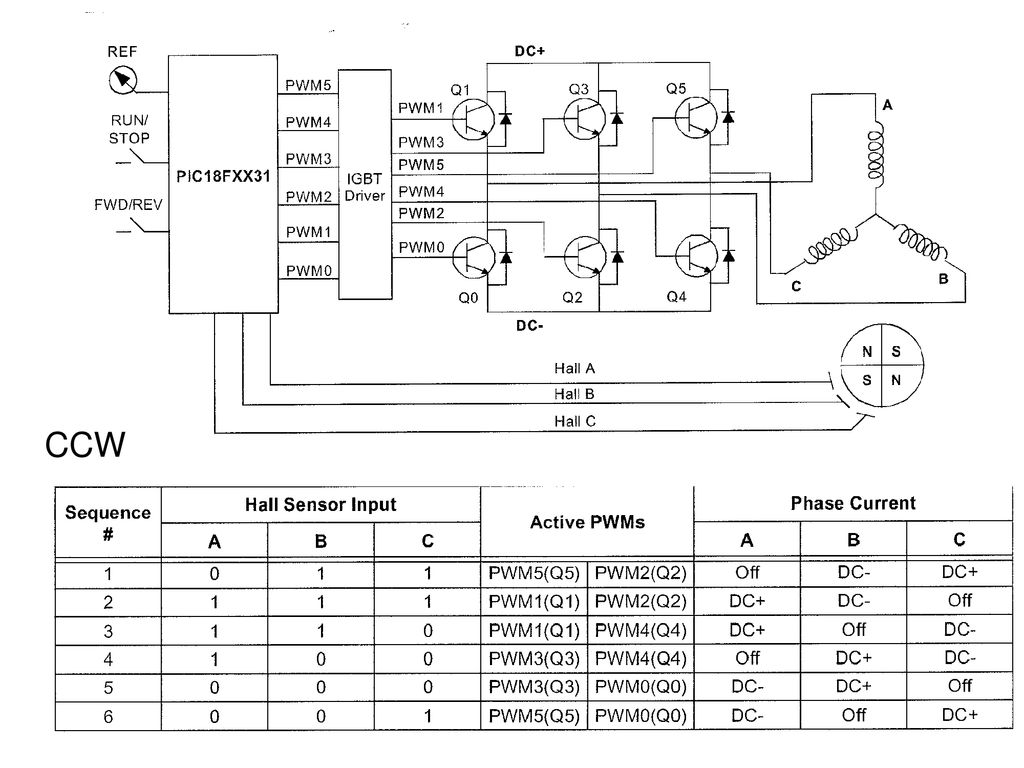 Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
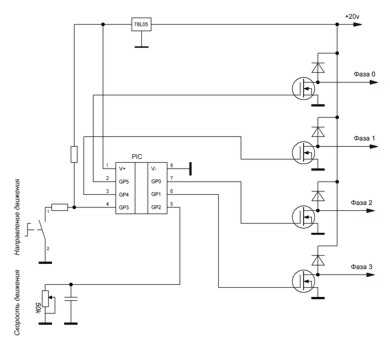
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла.
Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора.
Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.

В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках.
Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой.
Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.

Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Управление бесколлекторным двигателем постоянного тока с датчиками Холла
AntonChip
Создано: 30 апреля 2017 Просмотров: 36097
ATmega48 Бесколлекторный двигатель IR2101 Датчик Холла
Бесколлекторные двигатели с датчиками Холла(Sensored brushless motors) применяются как тяговые, в электроприводах, где нужен высокий крутящий момент при низких оборотах.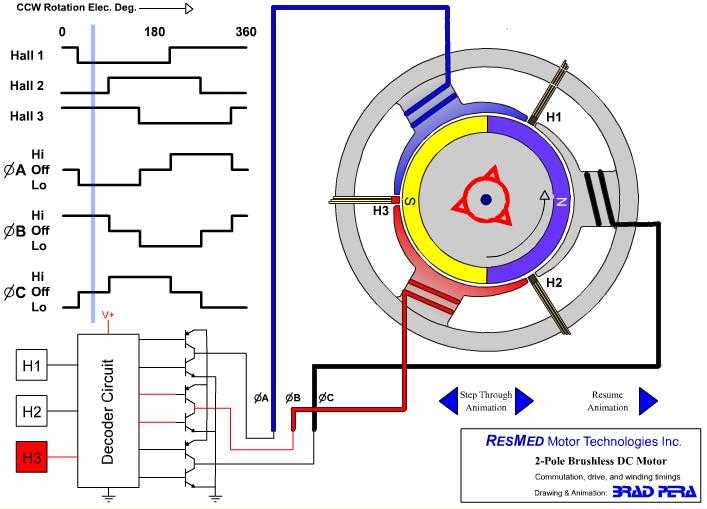
Переключение обмоток двигателя происходит по сигналу датчиков. Обычно они встроены в корпус двигателя. В зависимости от типа они могут быть аналоговыми или цифровыми, это следует учесть при написании программы.
В моем двигателе датчики цифровые.
Силовая часть схемы остается прежней. Вместо сигналов обратной ЭДС мы будем обрабатывать сигналы с датчиков Холла. В большинстве случаев датчики Холла подключают к выводам внешних прерываний микроконтроллера.
В этом примере мы используем контроллер ATmega48, так как у него внешние прерывания можно организовать на всех портах, в отличие от Atmega8. Тактирование осуществляется от внешнего кварца частотой 8МГц.
Ниже показана схема контроллера:
Регулировку частоты вращения вала двигателя сделаем при помощи переменного резистора, т.е. используем АЦП микроконтроллера. Потенциометр подключается к выводу ADC3.
Результат преобразования напряжения записываем в регистры сравнения OCR0A, OCR0B и OCR2B, тем самым меняя значение ШИМ на выходе.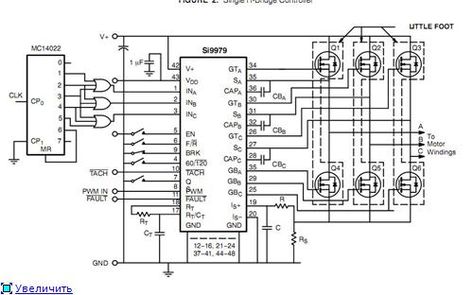 Переключение обмоток двигателя происходит в обработчике внешнего прерывания.
Переключение обмоток двигателя происходит в обработчике внешнего прерывания.
При считывании датчиков их значения записываются в переменную position, исходя из этого какая позиция будет записана в эту переменную, происходит переключение выходов согласно таблице ниже:
На схеме не показаны светодиоды(подключены к PC2..0), которые сигнализируют о состоянии каждого датчика, но в программе они задействованы.
// Подключение бесколлекторного двигателя к AVR(с датчиками Холла)
#include
#include
// Фаза U(Верхнее плечо)
#define UH_ON TCCR0A |= (1
Управление бесколлекторным двигателем — вступление
Как-то для перемешивающего устройства мне потребовалось выбрать двигатель, долговечный и компактный. Идеальным тогда мне показался бесколлекторный (вентильный) двигатель с датчиками холла. Замечательный двигатель, но он имеет главный недостаток — дороговизну блока управления этим двигателем. И тогда у меня появилась идея — попробовать сделать дешевую плату управления этим двигателем.
Этим и занимался в свободное время. Перемешивающее устройство в итоге так и не было сделано, но зато я накопил некоторый объем знаний и сделал плату управления этим двигателем. В процессе работы пришлось пойти на некоторое усложнение и удорожание — добавил токовую защиту, интерфейс связи RS485. но что-то можно будет и убрать потом, был бы спрос.
Также для дешевизны нужен серийный выпуск, но об этом думать пока рано, сперва нужно довести разработку до ума, поэтому буду благодарен за любые советы и подсказки. Также могу поделиться своим опытом.Вот что получилось в результате:
- на фото 2 платы — плата дисплея 101х45мм и плата управления двигателем 98х50мм.
и эти же платы снизу:Основные характеристики платы управления бесколлекторным двигателем:
- Напряжение питания 24..44В
- Максимальный ток 10А
- режимы работы: контроль напряжения / контроль скорости
- управление: RS485 MODBUS / потенциометр и кнопки
- встроенный источник +5V 1A
- Себестоимость единичного изготовления — 2000р. (+1000р. — плата индикации)
 (+1000р. — плата индикации)
(+1000р. — плата индикации)Немного пояснений:1. Нестандартное напряжение питания 44В может пригодиться, чтобы питать 36В двигатели от 48В блоков питания, имеющих подстройку напряжения. В принципе можно расширить диапазон до 48В, немного потеряв в параметрах.2. Ток в 10А подходит для работы самого мощного 36В двигателя FL56BLS04 в номинальном режиме. Допускается повышение тока при принудительном охлаждении. Можно ставить транзисторы мощнее в больших корпусах, но тогда потребуется и мощный дорогой блок питания. Целесообразность можно обсудить.3. Поддержание скорости хорошо работает только с малоинерционной нагрузкой и частотой вращения до половины номинальной.4. К блоку разработана панель управления с интерфейсом RS485. При необходимости можно внести в панель изменения, либо могу выложить её схему и программу для контроллера attiny2313.5. Изготовление корпусов для платы планируется только при положительных отзывах и наличии спроса. Без корпуса эта плата — источних мощных помех, тест на электромагнитную совместимость она не пройдет.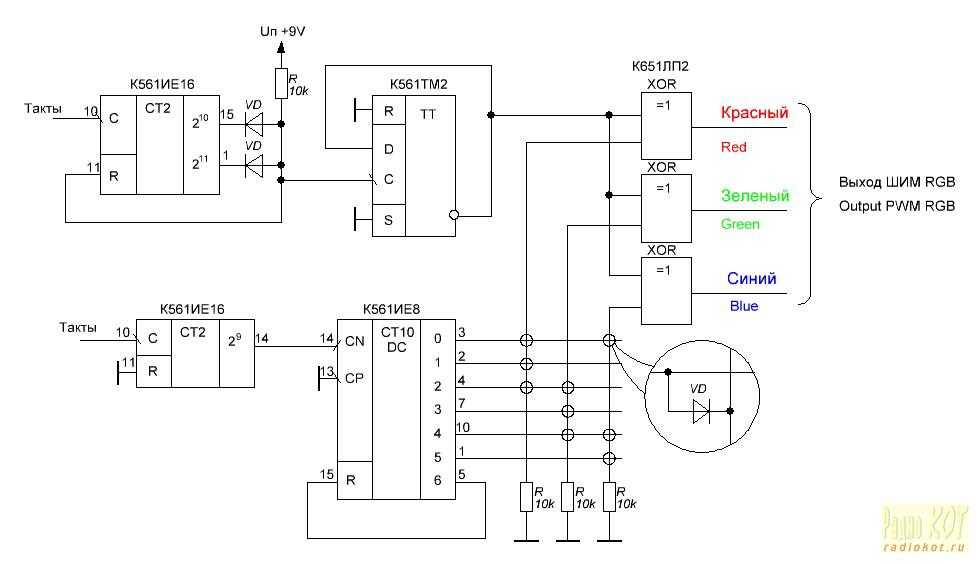 6. Отсутствует опторазвязка логической части схемы, правда за всё время разработки необходимости в ней не возникало. Таже отсутствует защита от переполюсовки входного питания. Отсутствуют выходные фильтры на фазы двигателя, поэтому силовые провода от платы управления до двигателя должны быть как можно короче.Вобщем эта разработка — попытка найти компромисс между ценой драйвера и его возможностями. Китайские блоки управления наверняка имеют все защиты и проходят тест на электромагнитную совместимость, но ситуация, когда для управления двигателем ценой в 2000р. нужен блок ценой в 5000р., мне кажется неправильной. Цель — получить блок управления стоимостью 2500р. (добавится ещё корпус) и плату индикации стоимостью 1000р.А теперь немного теории.
6. Отсутствует опторазвязка логической части схемы, правда за всё время разработки необходимости в ней не возникало. Таже отсутствует защита от переполюсовки входного питания. Отсутствуют выходные фильтры на фазы двигателя, поэтому силовые провода от платы управления до двигателя должны быть как можно короче.Вобщем эта разработка — попытка найти компромисс между ценой драйвера и его возможностями. Китайские блоки управления наверняка имеют все защиты и проходят тест на электромагнитную совместимость, но ситуация, когда для управления двигателем ценой в 2000р. нужен блок ценой в 5000р., мне кажется неправильной. Цель — получить блок управления стоимостью 2500р. (добавится ещё корпус) и плату индикации стоимостью 1000р.А теперь немного теории.
1. Что такое бесколлекторный двигатель и зачем он нужен.
Если кто-нибудь нашел эту запись, то он уже в общих чертах представляет, что это такое. Поэтому я лучше начну с фотографий внутренностей обычных китайских двигателей и расскажу, в каких случаях стоит его использовать.
- Главные достоинства бесколлекторного двигателя, которые и определяют применение — долговечность, высокие динамические характеристики, высокая мощность и крутящий момент при небольших габаритах.
На фотографии 2 китайских двигателя FL42BLS01 и FL57BLS04. Характеристики их легко найти в яндексе или гугле. Именно FL42BLS01 я изначально выбрал для привода мешалки, а FL57BLS04 приобрел потом как более мощный для проверки платы. Есть ещё более мощная серия FL86, но пока я не вижу, где её можно применить.А вот и разобранный FL42BLS01. Как видно, качество исполнения довольно неплохое для китайского двигателя. Крышки аллюминиевые с посадочными местами под подшипники, в задней крышке располагается плата с 3 датчиками холла. Датчики никак не выравниваются, просто торчат из платы, что не очень хорошо. Небольшое пояснение — для переключения обмоток статора нужно знать угол поворота ротора — датчики холла нахотятся вблизи ротора и срабатывают(или выключаются) при изменении направления магнитного поля. Это самые распостраненные датчики. Статор набран из стальных пластин, вообще в его конструкции нет ничего необычного. Ротор точеный, с наклеенным на него магнитным кольцом, которое выкрашено черной краской.А это уже фото FL57BLS04, здесь датчики холла находятся в пластиковой обойме и на роторе для них сделано отдельное магнитное кольцо, что лучше ) Передний подшипник на роторе больше заднего, и это тоже правильно. Магнит ротора набран из 4 штук, унификация однако. Например в младшей модели FL57BLS01 на роторе будет только 1 такой магнит.Теперь неплохо бы разместить фото коллекторного двигателя для сравнения, но оказалось довольно сложно найти небольшой качественный коллекторный двигатель с подшипниками. Дорогую экзотику от Maxon motor я не рассматривал. Правда есть советские двигатели типа ДПР и ДПМ, но они давно не выпускаются и закладывать их в новые конструкции нежелательно. Хотя потом наверное размещу фотографию его устройства.Недостаток один и самый главный — цена связки двигатель+блок управления+блок питания.
Это самые распостраненные датчики. Статор набран из стальных пластин, вообще в его конструкции нет ничего необычного. Ротор точеный, с наклеенным на него магнитным кольцом, которое выкрашено черной краской.А это уже фото FL57BLS04, здесь датчики холла находятся в пластиковой обойме и на роторе для них сделано отдельное магнитное кольцо, что лучше ) Передний подшипник на роторе больше заднего, и это тоже правильно. Магнит ротора набран из 4 штук, унификация однако. Например в младшей модели FL57BLS01 на роторе будет только 1 такой магнит.Теперь неплохо бы разместить фото коллекторного двигателя для сравнения, но оказалось довольно сложно найти небольшой качественный коллекторный двигатель с подшипниками. Дорогую экзотику от Maxon motor я не рассматривал. Правда есть советские двигатели типа ДПР и ДПМ, но они давно не выпускаются и закладывать их в новые конструкции нежелательно. Хотя потом наверное размещу фотографию его устройства.Недостаток один и самый главный — цена связки двигатель+блок управления+блок питания.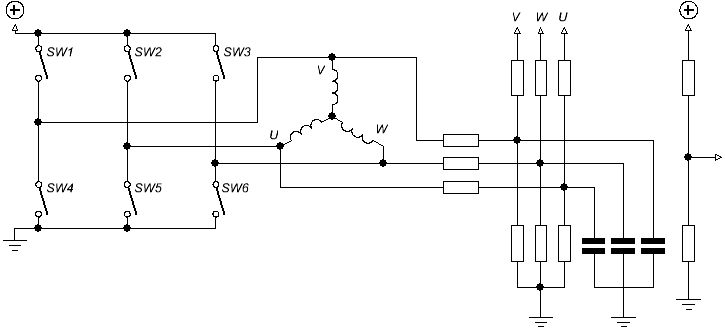 В тех случаях, когда не нужна долговечность — лучше использовать коллекторные двигатели, что и делают производители электроинструмента, и совершенно правы. В стационарном оборудовании, где не важны габариты и динамические характеристики лучше использовать асинхронные двигатели. Но в диапазоне малых мощностей асинхронные двигатели существенно крупнее бесколлекторных, вот почему для привода мешалки я остановился на бесколлекторнике.Наиболее известная область, где бесколлекторные двигатели вне конкуренции — авиамоделизм.
В тех случаях, когда не нужна долговечность — лучше использовать коллекторные двигатели, что и делают производители электроинструмента, и совершенно правы. В стационарном оборудовании, где не важны габариты и динамические характеристики лучше использовать асинхронные двигатели. Но в диапазоне малых мощностей асинхронные двигатели существенно крупнее бесколлекторных, вот почему для привода мешалки я остановился на бесколлекторнике.Наиболее известная область, где бесколлекторные двигатели вне конкуренции — авиамоделизм.
Какими бывают бесколлекторные двигатели:
— бездатчиковые, с датчиками холла, с энкодером. На самом деле для работы двигателя всё равно нужно как-либо определять положение ротора и бездатчиковые двигатели не совсем бездатчиковые — положение ротора определяется по напряжениям в обмотках(противоЭДС), возникающих при вращении ротора и зависящих от его скорости и положения. Главная проблема — раскрутить ротор, стабильно определять положение таким методом можно только на высокой скорости. Про высокие динамические характеристики при таком управление можно забыть. Плюс такого решения — уменьшение цены. Именно такие двигатели используются в авиамоделизме, в шпинделе жестких дисков, в вентиляторах.Датчики Холла устанавливаются на двигатели, от которых требуется уверенный старт, возможность работать на небольших оборотах и высокий момент с начала движения, но к точности положения ротора требования невысоки. Такие двигатели можно найти в капстанах видеомагнитофонов, в сидиромах, в транспортных средствах.И наконец по энкодеру положение ротора определяют, когда важна точность разгона, позиционирования и торможения. Это сервоприводы станков. Энкодер в простейшем виде можно увидеть в старой мышке с шариком. Диск с множеством прорезей и оптопара дают несколько десятков срабатываний за один оборот. Промышленные энкодеры выполняются с высокой точностью, поэтому стоят дорого. Точность нужна для расчета ускорений привода, к электронике также высокие требования.
Про высокие динамические характеристики при таком управление можно забыть. Плюс такого решения — уменьшение цены. Именно такие двигатели используются в авиамоделизме, в шпинделе жестких дисков, в вентиляторах.Датчики Холла устанавливаются на двигатели, от которых требуется уверенный старт, возможность работать на небольших оборотах и высокий момент с начала движения, но к точности положения ротора требования невысоки. Такие двигатели можно найти в капстанах видеомагнитофонов, в сидиромах, в транспортных средствах.И наконец по энкодеру положение ротора определяют, когда важна точность разгона, позиционирования и торможения. Это сервоприводы станков. Энкодер в простейшем виде можно увидеть в старой мышке с шариком. Диск с множеством прорезей и оптопара дают несколько десятков срабатываний за один оборот. Промышленные энкодеры выполняются с высокой точностью, поэтому стоят дорого. Точность нужна для расчета ускорений привода, к электронике также высокие требования.
-Инраннеры и аутраннеры.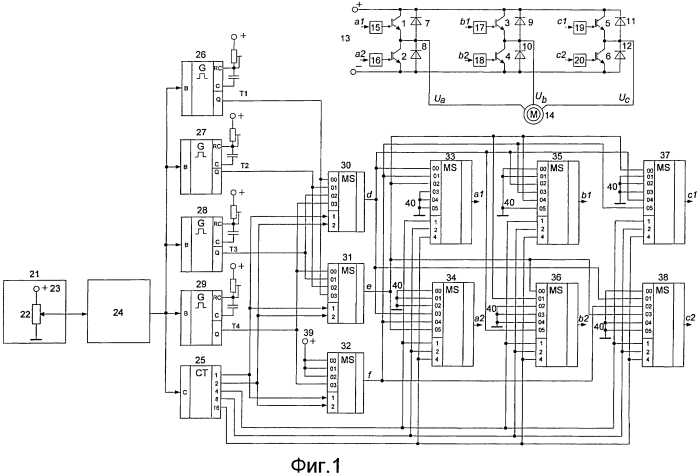 Термины пришли из моделизма. Инраннер — цилиндрический ротор находится внтри двигателя(как на фотографях выше).
Термины пришли из моделизма. Инраннер — цилиндрический ротор находится внтри двигателя(как на фотографях выше).
Аутраннер — ротор в виде чашки вращается снаружи, а внутри расположен статор с обмотками. Аутраннеры имеют больше момент, но несколько меньшую мощность.
Практически все промышленные двигатели — инраннеры, я знаю только линейку аутраннеров от Japan Servo. Но в моделизме аутраннеры распространены.
Кстати шаговые двигатели — это разновидность бесколлекторных двигателей, но с очень большим числом полюсов. Поэтому они имеют больше момент, но меньшую мощность.
Бесколлекторый двигатель также можно использовать как шаговый, но шаг будет значительно больше, а момент удержания значительно меньше.
Если же шаговый двигатель оснастить энкодером — можно значительно улучшить его динамические характеристики, получится дешевая альтернатива серводвигателям.
О контроллерах бесколлекторных двигателей и их схемотехнике я написал в следующей записи.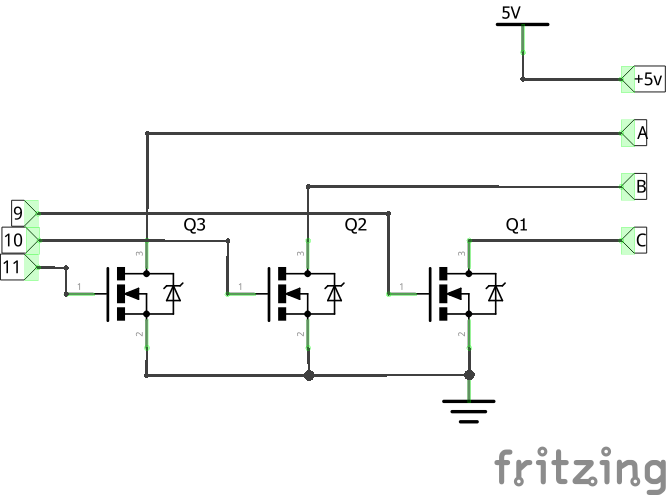
15–60 В — предварительный драйвер трехфазного бесщеточного двигателя постоянного тока
Представленный здесь проект представляет собой трехфазный предварительный привод двигателя BLDC . Проект состоит из 3-х полумостовых драйверов IR2101 и 6-канальных сильноточных N-MOSFETS. Проект может быть сконфигурирован как 3 независимых полумоста Н-мост для коллекторного двигателя постоянного тока или один драйвер сильноточного бесщеточного двигателя . Положение ротора можно определить с помощью 3 датчиков Холла, встроенных в двигатель. Датчики положения вала на эффекте Холла используются для управления последовательностью переключения трех 1/2-мостовых выходов. Напряжение моста может варьироваться от 15 В до 60 В , а максимальный суммарный ток моста составляет 10 А с радиатором большого размера и достаточным потоком воздуха с использованием вентилятора.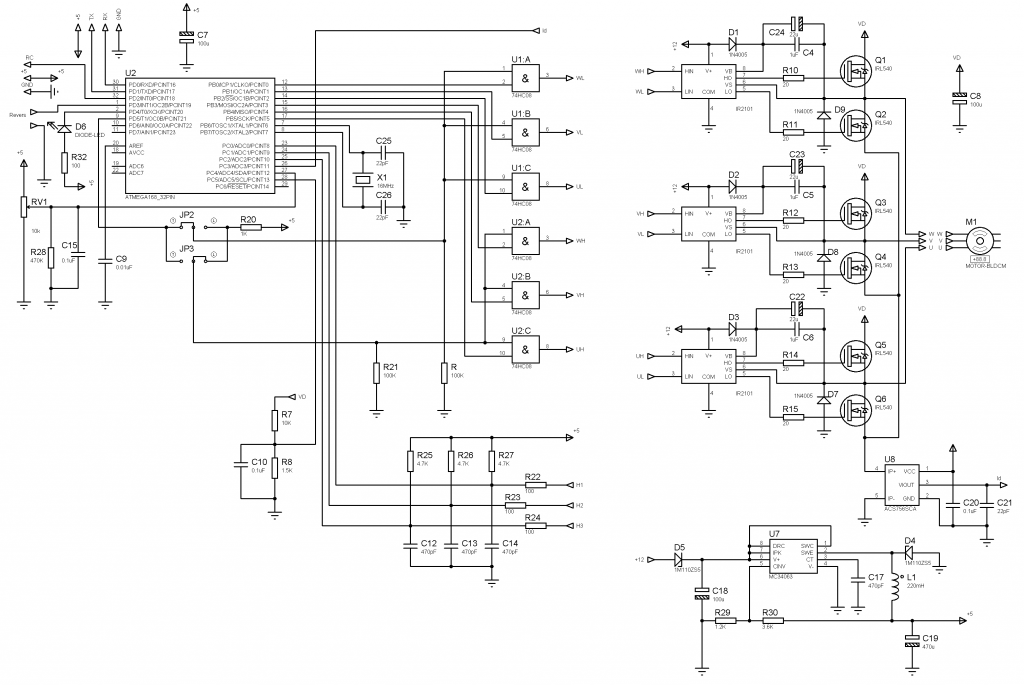 Этот драйвер двигателя можно использовать для различных приложений, включая электронные велосипеды, инструменты с батарейным питанием, электроусилитель руля, инвалидные кресла или любое другое приложение, где используется двигатель BLDC. Мотор пуск/стоп , вперед/назад вращение, торможение с замкнутым контуром управление скоростью . Проект также включает в себя 3-х фазную схему измерения тока, которую можно использовать для обнаружения 3-х независимых фазных токов. Регулятор LM317 подает 5 В постоянного тока на схему операционного усилителя. Все входы и выходы обратной связи предназначены для простого микроконтроллера или интерфейса DSP.
Этот драйвер двигателя можно использовать для различных приложений, включая электронные велосипеды, инструменты с батарейным питанием, электроусилитель руля, инвалидные кресла или любое другое приложение, где используется двигатель BLDC. Мотор пуск/стоп , вперед/назад вращение, торможение с замкнутым контуром управление скоростью . Проект также включает в себя 3-х фазную схему измерения тока, которую можно использовать для обнаружения 3-х независимых фазных токов. Регулятор LM317 подает 5 В постоянного тока на схему операционного усилителя. Все входы и выходы обратной связи предназначены для простого микроконтроллера или интерфейса DSP.
Цепь измерения тока: Цепь измерения тока измеряет ток по всем 3 полумостам и обеспечивает 3 независимых выхода обратной связи по току, которые можно использовать для измерения перегрузки по току или конфигурации без чувствительности FOC, выход по умолчанию 0A составляет 1,45 В и обеспечивает прибл.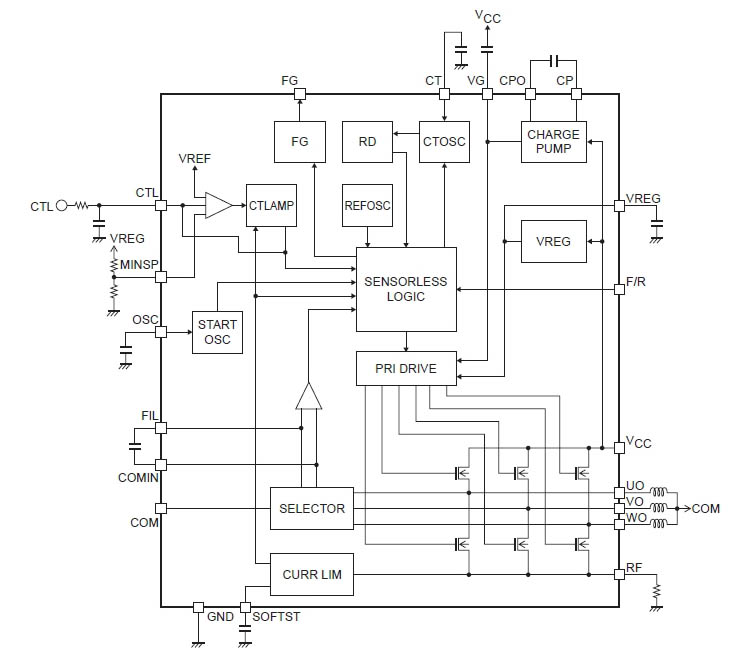 100 мВ/Ампер. Пользователь может изменить коэффициент усиления операционного усилителя, токовые шунтирующие резисторы в соответствии с требованиями, питание LM317 5 В для схемы операционного усилителя.
100 мВ/Ампер. Пользователь может изменить коэффициент усиления операционного усилителя, токовые шунтирующие резисторы в соответствии с требованиями, питание LM317 5 В для схемы операционного усилителя.
Пользователю необходимо сгенерировать последовательность из 6 импульсов ШИМ для управления двигателем, плата принимает ввод TTL, более подробная информация о драйвере бесколлекторного двигателя доступна здесь:
- https://www.digikey.com/en/articles/why-and -как-синусоидально-управлять-трехфазными-бесщеточными-двигателями постоянного тока
- https://www.microchip.com/wwwappnotes/appnotes.aspx?appnote=en1001927
Особенности
- Рабочий двигатель 15–60 В
- Нагрузка 5 А (максимум 10 А)
- Питание драйвера затвора 12–15 В пост. тока
- 3 Независимый полумост
- H-мост (драйвер щеточного двигателя постоянного тока)
- Драйвер трехфазного коллекторного двигателя постоянного тока
- Обратная связь по напряжению шины постоянного тока (питание нагрузки)
- Светодиод питания драйвера затвора
- 3-фазный выход датчика тока 100 мВ/А
- Частота ШИМ до 20 кГц.
- Требуется 6 сигналов ШИМ
- Размеры печатной платы 143,69 x 52,40 мм
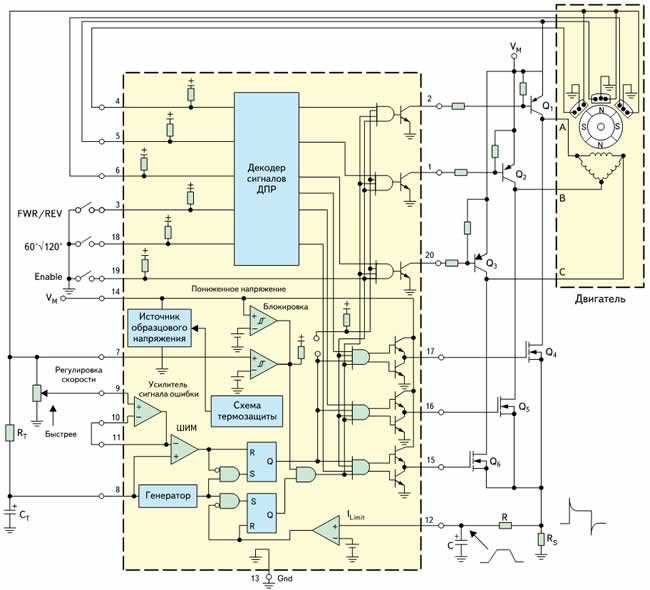
Схема
Список деталей
| №. | КОЛ-ВО. | ПОЗ. | ИСХ. | ПРОИЗВОДИТЕЛЬ | ПОСТАВЩИК | ПОСТАВЩИК АРТИКУЛ № | |
|---|---|---|---|---|---|---|---|
| 1 | 1 | CN1 | 14-ШТЫРЬКОВАЯ НАРУЖНАЯ ГОЛОВКА ШАГ 2,54 ММ0108 | ||||
| 2 | 2 | CN2 | 2-контактная винтовая клемма, шаг 5,08 мм | PHOENIX | DIGIKEY | 710-9044 | |
| 3 | 1 | CN3 | 3-ШТЫРЬКОВАЯ ВИНТОВАЯ КЛЕММА ШАГ 5,08 ММ | PHOENIX | DIGIKEY | ||
| 4 | 1 | CN4 | 3-ШТЫРЬКОВАЯ ВТУЛКА ШАГ 2,54 ММ | WURTH | DIGIKEY | 732-5316-НД | |
| 5 | 3 | C1,C3,C5 | 10 мкФ/25 В SMD РАЗМЕР 1210 | MURATA/YAGEO | |||
| 6 | 3 | C2,C4,C6 | 4,7 мкФ/25 В SMD РАЗМЕР 1210 | MURATA/YAGEO | |||
| 7 | 8 | C7,C8,C9,C21,C26,C27,C29,C34 | 0,1 мкФ/50 В SMD РАЗМЕР 0805 | 09 Мурата/10189 YAGEO 81107 | |||
| 8 | 6 | C10,C12,C14,C15,C16,C18 | 1K PF/50V SMD РАЗМЕР 0805 | MURATA/YAGEO | |||
| 9 | 3 | C11,C13,C17 | ПРОПУСТИТЬ | ||||
| 10 | 1 | C19 | 100PF/50V SMD РАЗМЕР 0805 | MURATA/YAGEO | |||
| 11 | 1 | C20 | 100 мкФ/16 В SMD РАЗМЕР 1210 | MURATA/YAGEO | |||
| 12 | 2 | C22,C24 | 470 мкФ/100 В | RUBYCON | DIGIKEY | 1189-1189-1189-1189-11 | |
| 13 | 7 | ПР1,С23,С28,С30,С31,С32,С33, | ДНП | ||||
| 7 | Р34,Р38,Р40,Р41,Р42,Р43,Р46, | ДНП | |||||
| 4 | Р48,Р49,Р50,Р52 | ДНП | |||||
| 14 | 3 | D1,D2,D3 | SS34 ИЛИ MBRS240 | НА ПОЛУ | DIGIKEY | ||
| 15 | 6 | D4,D5,D6,D7,D8,D9 | 1N4148 | МИКРОЧИП | DIGIKEY | ||
| 16 | 1 | D10 | РАЗМЕР СИД SMD 0805 | OSRAM | DIGIKEY | 475-1495-1-ND0108 | |
| 17 | 6 | Q1,Q2,Q3,Q4,Q5,Q6 | FDh4632 | НА ПОЛУ | DIGIKEY 8 FDh 846307 | ||
| 18 | 6 | R1,R2,R3,R4,R5,R6 | 10E 5% SMD РАЗМЕР 0805 | MURATA/YAGEO | |||
| 19 | 3 | R7,R8,R9 | 0. 01E/3W THT 01E/3W THT | VISHAY | DIGIKEY | LVRB-0. | |
| 20 | 6 | R10,R12,R16,R19,R22,R28 | 40.02E 1% SMD РАЗМЕР 0805 | MURATA/YAGEO | |||
| 21 | 6 | R11,R13,R17,R20,R23,R30 | 560E 1% SMD РАЗМЕР 0805 | MURATA/YAGEO | 19 | ||
| 22 | 6 | R14,R15,R18,R21,R24,R31 | 6.04K 1% SMD РАЗМЕР 0805 | MURATA/YAGEO | 08 | ||
| 23 | 1 | R25 | 10K 5% SMD РАЗМЕР 1206 | MURATA/YAGEO | |||
| 24 | 2 | R26,R27 | 39K 5% SMD РАЗМЕР 1206 | MURATA/YAGEO | |||
| 25 | 1 | R28 | РАЗМЕР 100K 5% SMD 1206 | MURATA/YAGEO | |||
| 26 | 3 | 8-КОНТАКТНЫЙ DIP | 8-КОНТАКТНЫЙ DIP-РАЗЪЕМ IC | TE | DIGIKEY | А120347-НД | |
| 27 | 4 | R32, R53, R54, R55 | 1K 5% SMD РАЗМЕР 0805 | MURATA/YAGEO | 110107 | ||
| 28 | 1 | R33 | 220E 1% SMD РАЗМЕР 0805 | MURATA/YAGEO | DIGIKEY | ||
| 29 | 1 | R35 | 680E 1% SMD SIZE 0805 | MURATA/YAGEO | DIGIKEY | ||
| 30 | 6 | R36, R37, R39, R44, R45, R47 | 10K 5% SMD РАЗМЕР 0805 | MURATA/YAGEO | |||
| 31 | 1 | R51 | 0E РАЗМЕР SMD 0805 | MURATA/YAGEO | DIGIKEY | ||
| 32 | 3 | U1,U2,U3 | IR2101 DIP8 | INFINION | DIGIKEY | IR2109P 1F-ND 109P | |
| 33 | 1 | U4 | MCP6024-I/SL | MICROCHIP | DIGIKEY | MCP6024-I/SL-ND | |
| 34 | 1 | U5 | LM317M DPAK | ST | DIGIKEY | 497-1574-10-ND |
Соединения
Gerber View
Photos
Video
 youtube.com/embed/0xTJNQ6hJZU» frameborder=»0″ allowfullscreen=»allowfullscreen»/>
youtube.com/embed/0xTJNQ6hJZU» frameborder=»0″ allowfullscreen=»allowfullscreen»/>
IR2101 Datasheet
Infineon-ir2101-DS-v01_00-EN
How does an electronic speed controller for a brushless DC motor work? И что нужно учитывать при выборе подходящего?
При управлении скоростью вращения бесщеточного двигателя постоянного тока (BLDC) существует несколько методов, которые можно применять в зависимости от решаемых задач. Проблемы управления скоростью двигателя BLDC различаются в зависимости от конкретного применения. В этой статье обсуждается, как регуляторы скорости для бесщеточных двигателей постоянного тока регулируют скорость вращения, их типичные методы, преимущества и основные области применения.
Основы управления скоростью бесщеточного двигателя постоянного тока
В бесщеточном двигателе постоянного тока соотношение между приложенным напряжением и крутящим моментом нагрузки определяет скорость вращения.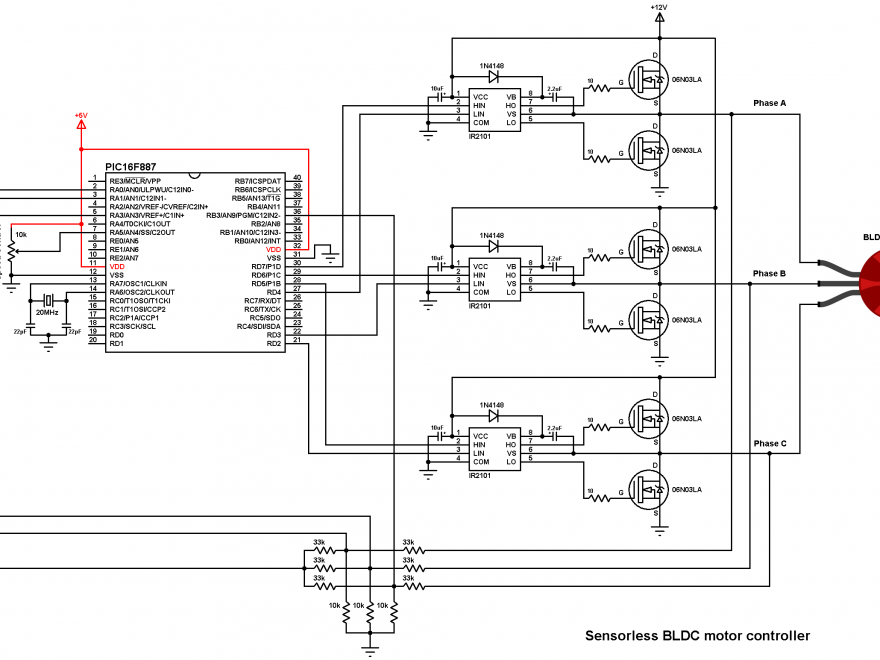 Это означает, что при использовании двигателя вы можете управлять скоростью вращения двигателя, изменяя приложенное напряжение.
Это означает, что при использовании двигателя вы можете управлять скоростью вращения двигателя, изменяя приложенное напряжение.
Каждый бесщеточный двигатель постоянного тока имеет приводную цепь для вращения двигателя, и скорость бесщеточного двигателя постоянного тока изменяется путем управления приводной цепью.
Управление напряжением с обратной связью является типичным методом управления скоростью двигателей постоянного тока
Метод управления напряжением широко используется для управления скоростью двигателей постоянного тока.
Схематически управление напряжением двигателя постоянного тока состоит из цепи привода двигателя, контроллера и датчика скорости. Сигнал от датчика скорости возвращается к контроллеру для управления скоростью двигателя на уровне заданной (опорной) скорости или близкой к ней.
Принципиальная схема управления скоростью двигателя постоянного тока с помощью управления напряжением
Два типа управления напряжением привода двигателей постоянного тока
Существует несколько методов изменения напряжения привода двигателя постоянного тока — ШИМ и PAM.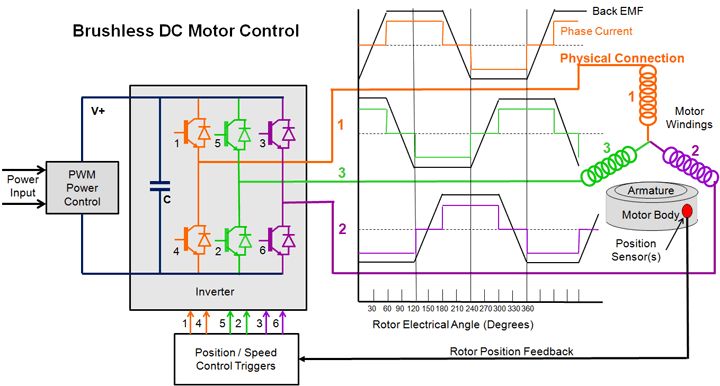
Метод ШИМ
ШИМ означает широтно-импульсную модуляцию. Этот метод подает напряжение на двигатель постоянного тока в виде импульсов. Путем модуляции ширины импульса (величины нагрузки) изменяется напряжение (среднее напряжение), управляющее двигателем.
ШИМ реализуется с относительно простой конфигурацией схемы и обычно используется в двигателях постоянного тока.
Метод PAM
PAM расшифровывается как амплитудно-импульсная модуляция. Этот метод изменяет напряжение, подаваемое на двигатель, путем модуляции уровня напряжения импульсов.
Метод PAM имеет более сложную конфигурацию схемы, чем метод PWM. Он часто используется в двигателях постоянного тока большого размера, которые приводятся в действие высоковольтными двигателями или двигателями постоянного тока со скоростью 100 000 об/мин или выше, чтобы повысить эффективность этих двигателей.
Вопросы, о которых следует помнить при управлении скоростью двигателей постоянного тока
Проблема при проектировании устройства или продукта с использованием двигателя постоянного тока заключается в том, насколько близко вы можете достичь и поддерживать заданную скорость во время работы устройства или продукта.
Вот примеры проблем с регулированием скорости двигателей постоянного тока.
Изменения момента нагрузки
Момент нагрузки изменяется при изменении состояния нагрузки или внешних/внутренних условий (температура, влажность, старение двигателя). Эти изменения повлияют на фактическую скорость двигателя.
Остаточное отклонение
Остаточное отклонение — это разница между заданной скоростью и фактической скоростью, которая может возникнуть, даже если скорость постоянно контролируется.
Это становится проблемой, когда требуется высокая точность скорости.
Реакция (латентность)
Момент инерции двигателя вызывает разность фаз, при которой скорость вращения реагирует на крутящий момент привода с задержкой. Когда вы увеличиваете входное напряжение, чтобы получить более высокую скорость вращения, скорость изменяется с задержкой из-за этой характеристики.
Это становится проблемой, когда фактическая скорость должна быстрее достичь заданной скорости.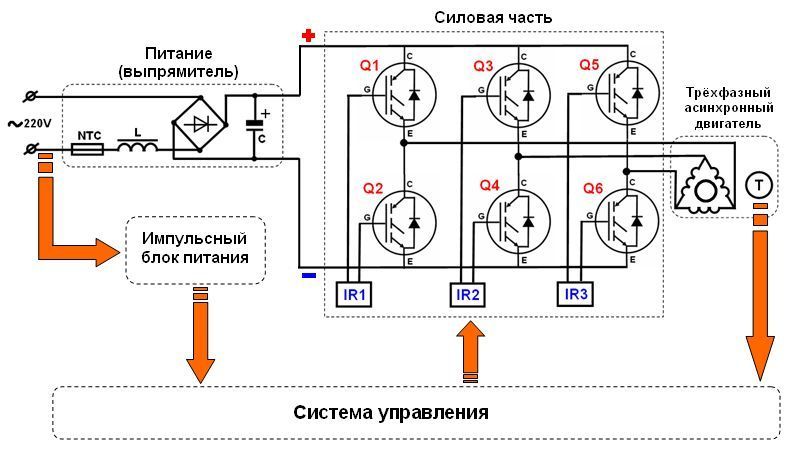
Высокоточные методы управления для решения проблем управления скоростью двигателей постоянного тока
Ниже приведены методы более точного контроля напряжения, их преимущества, соображения и области применения. Какой метод применить, зависит от проблемы, которую вы должны решить.
Аппаратное управление скоростью
Аппаратное управление скоростью двигателей постоянного тока реализовано в конфигурации схемы с использованием ИС и использует два типа обратной связи: обратную связь по скорости и обратную связь по фазе.
Обратная связь по скорости применяет сервопривод FG или дискриминатор скорости. Оба выполняют управление с обратной связью, вычисляя разницу между скоростью, измеренной датчиком, и заданной скоростью.
PLL — это типичный метод управления фазовой обратной связью. PLL расшифровывается как Phase Locked Loop. Он определяет приложенное напряжение путем оценки разности фаз между импульсным сигналом положения, обнаруженным датчиком, и импульсным сигналом целевого положения.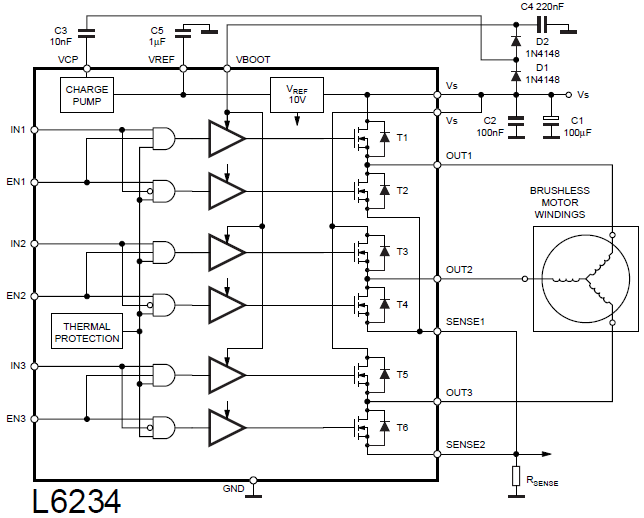
Причина, по которой аппаратное управление использует как обратную связь по скорости, так и обратную связь по фазе, заключается в том, что остаточное отклонение все еще слишком велико при использовании только обратной связи по скорости. Поэтому фазовая обратная связь включена для уменьшения остаточного отклонения.
Сигналы обратной связи по скорости/фазе преобразуются в аналоговое напряжение с помощью контурного фильтра, и напряжение подается на двигатель методом ШИМ или PAM. Контурный фильтр также отвечает за определение характеристик управления, а характеристики регулируются аппаратными компонентами, составляющими схему фильтра, такими как резисторы и конденсаторы. Таким образом, характеристики управления являются фиксированными и должны быть заранее правильно отрегулированы для продукта, в котором используется двигатель.
Этот метод управления можно использовать только в приложениях, где регулируемая переменная задана заранее. Поскольку этот метод можно реализовать при относительно низких затратах, он используется в большинстве продуктов на рынке, которые не регулируют регулируемую переменную индивидуально.
- Приложения
- Устройства, работающие с постоянной скоростью, такие как копировальные аппараты и т. д.
Блок-схема управления PLL с сервоприводом FG или дискриминатором скорости
Программное управление скоростью
При программном управлении скоростью контроллер, сконфигурированный с микрокомпьютером, выполняет ПИД-регулирование. ПИД — это аббревиатура от «Пропорциональный, интегральный и дифференциальный». Он возвращает три управляющих элемента — разницу между фактической скоростью и заданной скоростью, ее интеграл и дифференциал. Интеграл соответствует разности положений (разнице фаз) и играет роль в уменьшении остаточного отклонения. Дифференциал соответствует разнице ускорений и работает на улучшение реакции. Использование микрокомпьютера означает, что характеристики управления являются переменными. Поэтому вы можете настроить их на каждом отдельном устройстве, использующем двигатель.
Двигатель с этим методом стоит относительно дорого, потому что в нем используется микрокомпьютер. Однако в последние годы стали широко доступны недорогие микрокомпьютеры, и многие двигатели используют этот метод.
Однако в последние годы стали широко доступны недорогие микрокомпьютеры, и многие двигатели используют этот метод.
- Приложения
- Устройства, требующие дополнительной настройки параметров. Роботы и т. д.
Блок-схема ПИД-регулятора
Выберите бесколлекторный двигатель постоянного тока, который имеет методы регулирования скорости, соответствующие вашей проблеме и области применения
Как уже говорилось, существует множество методов управления скоростью бесщеточных двигателей постоянного тока. Выберите двигатель с соответствующими методами управления скоростью, учитывая требования к скорости (максимальная/минимальная, изменения, точность и т. д.), нагрузки, условия окружающей среды и стоимость двигателя.
Драйвер 3-фазного двигателя BLDC 50 В
Последнее обновление by Swagatam 58 Комментарии
Это еще одно универсальное 3-фазное драйверное устройство в виде ИС L6235 от ST Microelectronics позволяет управлять 50-вольтовым 3-фазным двигателем постоянного тока с чрезвычайной эффективностью.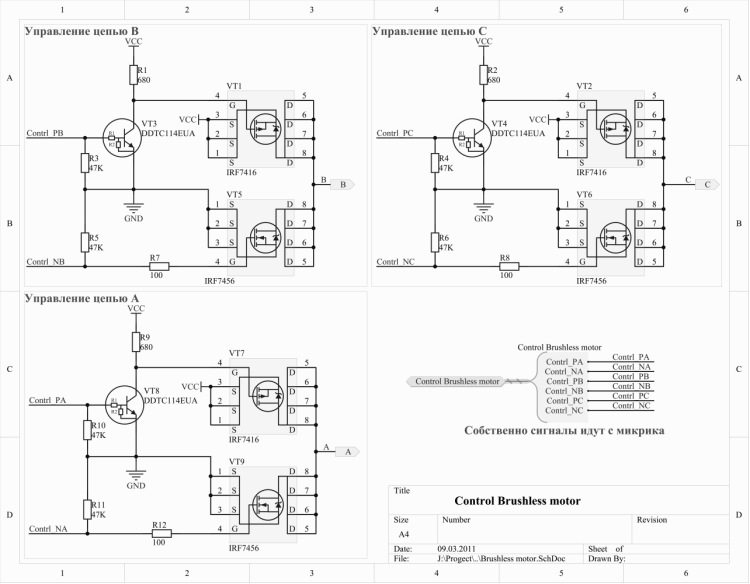 Микросхема также включает в себя все необходимые встроенные функции защиты, а также простая в настройке внешняя ступень управления скоростью.
Микросхема также включает в себя все необходимые встроенные функции защиты, а также простая в настройке внешняя ступень управления скоростью.
Содержание
Как работает драйвер IC L6235 BLDC
IC L6235 представляет собой встроенный DMOS-драйвер трехфазного двигателя со встроенной защитой от перегрузки по току. Разработанное с использованием технологии BCD, устройство сочетает в себе преимущества изолированных мощных транзисторов DMOS с CMOS и биполярными схемами в одном устройстве.
Внутренняя структура микросхемы
Чипы объединяют все схемы, необходимые для эффективного управления 3-фазным двигателем BLDC, как описано ниже: логика для несимметричных датчиков Холла для генерации необходимой последовательности фазового сдвига на 120 градусов для силового каскада.
Что касается встроенных защит, устройство L6235 предлагает нерассеивающую защиту от перегрузки по току на мощных полевых МОП-транзисторах, защиту от электростатического разряда и автоматическое отключение при перегреве в случае перегрева устройства выше номинального значения.
Схема драйвера BLDC 50 В
Типичная схема L6235 50 В 3-фазного драйвера BLDC двигателя показана выше, которая выглядит довольно просто с ее процедурами реализации.
Вам просто нужно соединить показанные элементы на месте и использовать конструкцию для управления любым двигателем BLDC с датчиками, рассчитанными на напряжение от 8 до 50 В при токе 3 ампера.
Детали распиновки
Функцию распиновки для указанной схемы можно изучить по следующим данным:
Контакт № 6, 7, 18, 19 = (GND) Это клеммы заземления микросхемы.
Контакт № 8 = (TACHO) Обозначается как выход с открытым стоком. Выходное значение отношения частоты к напряжению с открытым стоком. здесь каждый одиночный импульс от контакта h2 измеряется в виде импульса фиксированной и регулируемой длины.
Контакт № 9 = (RCPULSE) Сконфигурирован как параллельная RC-цепочка, подключенная между этим контактом и землей, которая фиксирует период моностабильного импульса, отвечающего за преобразователь частоты в напряжение.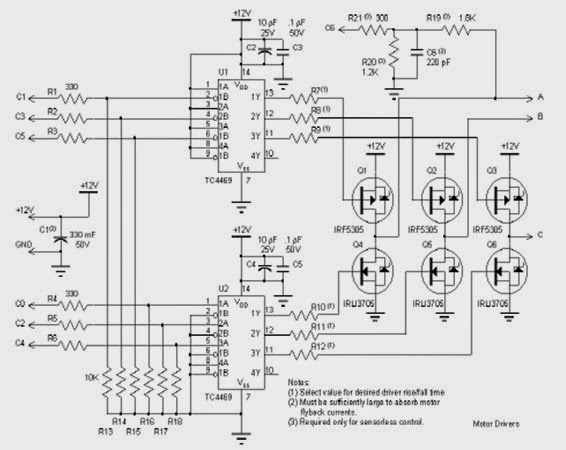
Контакт № 10 = (SENSEB) Этот контакт должен быть соединен вместе с контактом SENSEA для питания заземления через резистор мощности считывания. Здесь также необходимо подключить инвертирующий вход смыслового компаратора.
Контакт № 11 = (ВПЕРЕД/НАЗАД) Этот вывод можно использовать для изменения направления вращения двигателя BLDC. ВЫСОКИЙ логический уровень на этой схеме контактов вызовет движение вперед, а НИЗКИЙ логический уровень позволит двигателю BLDc вращаться в противоположном обратном направлении. Для включения фиксированного направления по часовой стрелке или против часовой стрелки эта распиновка может быть соответствующим образом подключена к +5 В или к линии заземления..
Контакт № 12 = (EN) Низкий логический сигнал отключит все внутренние силовые полевые МОП-транзисторы и остановит двигатель BLDC. В случае, если эта распиновка не предназначена для использования, она должна быть подключена к шине питания +5 В.
Контакт № 13 = (VREF). Вы можете увидеть операционный усилитель, сконфигурированный с этой распиновкой.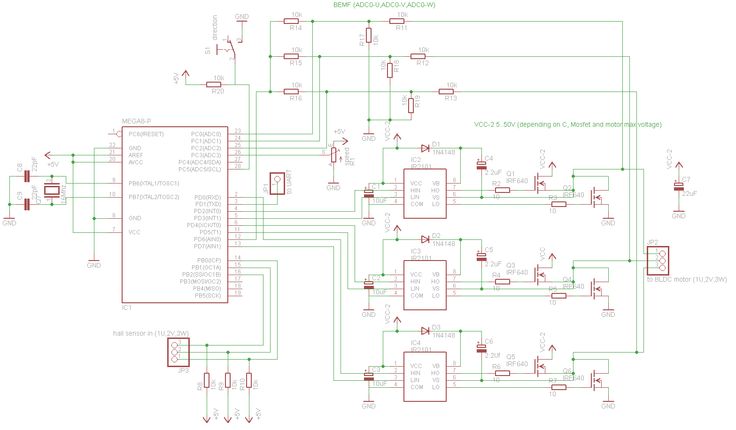 На вход Vref операционного усилителя, подключенного к этой распиновке, можно подать линейно регулируемое напряжение от 0 до 7 В для изменения скорости двигателя BLDC от 0 до макс. Если он не используется, обязательно подключите эту распиновку к GND.
На вход Vref операционного усилителя, подключенного к этой распиновке, можно подать линейно регулируемое напряжение от 0 до 7 В для изменения скорости двигателя BLDC от 0 до макс. Если он не используется, обязательно подключите эту распиновку к GND.
Контакт № 14 = (ТОРМОЗ) НИЗКИЙ логический уровень на этой схеме контактов включает все силовые полевые МОП-транзисторы высокого уровня, мгновенно приводя в действие функцию торможения/останова. В случае, если он не используется, эту распиновку можно оставить подключенной к +5 В.
Контакт № 15 = (VBOOT) Это просто входная распиновка для начального напряжения, необходимого для управления силовыми МОП-транзисторами. Просто подключите детали, как указано
Контакт № 5, 21, 16 = (3-фазный ВЫХОД на двигатель BLDC) Выход питания, который подключается к двигателю BLDC и питает двигатель.
Контакт № 17 = (VSB) Просто подключите его, как показано на схеме. Контакт № 20 = (VSA) То же, что и выше, необходимо подключить, как показано на схеме.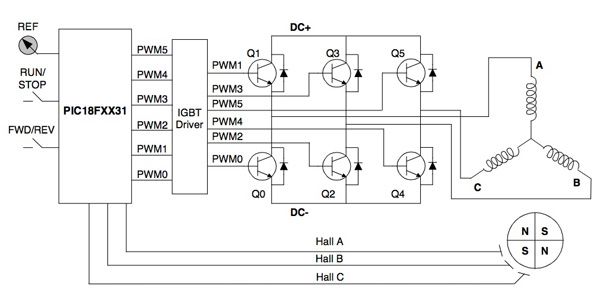
Контакт № 22 = (VCP) Это выход внутреннего генератора подкачки заряда, соедините части, как показано на схеме.
Контакты № 1, 23, 24 = 3-фазный последовательный сигнал от одностороннего датчика Холла BLDC можно настроить с помощью этих контактов. распиновка по уровню +5В.
Список деталей для приведенного выше обсуждаемого 3-фазного двигателя BLDC. = 10 NF
.
2 для общего числа. см. следующий лист данных из ST
О компании Swagatam
Я инженер-электронщик (dipIETE), любитель, изобретатель, разработчик схем/печатных плат, производитель.