Содержание
Типы шаговых двигателей
Шаговый двигатель постоянного тока – это электромеханическое устройство, преобразующее сигнал управления в угловое (или линейное) перемещение
ротора с фиксацией его в заданном положении без устройств обратной связи. При проектировании конкретных систем
приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное
управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель
является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован
понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у
котрых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же,
шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что
ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые
Готовые шаговые
двигатели с редукторами хотя и существуют, однако являются экзотикой.
купить шаговый двигатель
купить блок управления шаговым двигателем
Виды шаговых двигателей:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
- биполярные и униполярные шаговые двигатели
Способы управления фазами шагового двигателя:
- полношаговый режим
- полушаговый режим
- микрошаговый режим
Зависимость момента от скорости, влияние нагрузки:
Момент, создаваемый шаговым двигателем, зависит от скорости, тока в обмотках и схемы драйвера. У идеального
У идеального
шагового двигателя эта зависимость …далее ➠
Разгон шагового двигателя:
Для того, чтобы работать на большой скорости из области разгона, необходимо стартовать на низкой скорости
из области
старта, а затем выполнить …далее ➠
Резонанс шагового двигателя:
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде
внезапного
падения момента на некоторых …далее ➠
Недостатки шагового двигателя:
- шаговым двигателям присуще явление резонанса
- возможна потеря контроля положения ввиду работы без обратной связи
- потребление энергии не уменьшается даже без нагрузки
- затруднена работа на высоких скоростях
- невысокая удельная мощность
- относительно сложная схема управления
Преимущества шагового двигателя:
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- прецизионное позиционирование и повторяемость.
 Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу
Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу - возможность быстрого старта/остановки/реверсирования
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к
валу двигателя без промежуточного редуктора - может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных
импульсов
 Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу
Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагуОригинал этой статьи можно прочитать в журнале «Основы схемотехники», №6-7/2001. Автор — Л.Ридико
Есть идея? Шаговый привод: быстрый и точный.
Личные дневники
Подпишитесь на автора
Подписаться
Не хочу
3
«Недавно российским стартапом ‘SDencity’ (1) был представлен привод сочетающий в себе немыслимое для шаговых двигателей сочетание скорости и точности позиционирования. Добиться увеличения скорости в 2 раза и точности в десятки раз удалось путём объединения двух шаговых двигателей зубчатой ремённой передачей. В тестовой модели были применены зубчатые шкивы с 36-ю и 37-ю зубьями. Малая разница в количестве зубьев и определяет конечную точность (степень дискретизации) выходного вала привода.
Из кинематической схемы понятно, что шаговый двигатель 1 закреплён неподвижно, а вот корпус шагового двигателя 2 является выходным валом привода.Работой всей системы управляет микроконтроллер, обеспечивая два основных режима работы шаговых двигателей:
— попутное вращение: оба мотора вращаются в одну сторону обеспечивая удвоение скорости.
— встречное вращение: моторы вращаются навстречу друг другу обеспечивая высокую дискретность.
Стандартный двигатель за один шаг (в полношаговом режиме) поворачивает вал на угол 1.8 градуса. В представленной модели один шаг ШД1 обеспечит поворот ведомого шкива (37 зубьев) и корпуса ШД2 на угол примерно 1.75 градуса за счёт разности диаметров шкивов. Одновременно с этим шаговый двигатель ШД2 совершает поворот во встречном направлении на стандартный угол 1.8 градуса. Не трудно посчитать, что суммарный угол поворота выходного вала (корпуса ШД2) привода равен 1.8 — 1.75 = 0.05 градуса, т.е. дискретность привода возросла в 36 раз по сравнению с применением одиночного ШД . И это в полношаговом режиме. Микрошаговый режим обеспечивает гораздо более высокую дискретность.
Микроконтроллер принимает решение о режиме работы (встречное — попутное) в зависимости от текущей необходимости: быстрое перемещение или разгон/торможение и точное позиционирование.
Конечно привод не лишён недостатков коими можно считать:
— низкую жёсткость системы: эластичный ремень нивелирует высокую дискретность
— ограничение на угол поворота выходного вала: не более нескольких оборотов»
Так могла бы начинаться статья на 3DToday если бы нам удалось создать команду для реализации этого интересного проекта.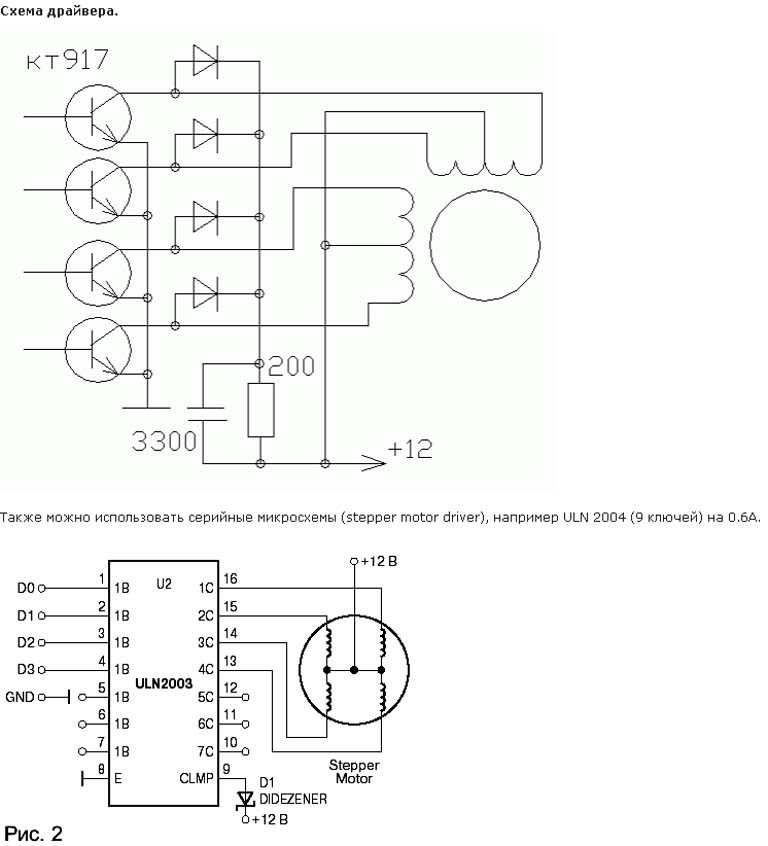
(1) Название вымышленное, все возможные совпадения случайны.
Подпишитесь на автора
Подписаться
Не хочу
3
Комментарии к статье
Еще больше интересных статей
Blatsk
Загрузка
06.03.2023
745
5
Подпишитесь на автора
Подписаться
Не хочу
Вкратце… работаю с программой Cinema 4D достаточно времени, что бы называть себя «опытным пользова…
Читать дальше
4
Подпишитесь на автора
Подписаться
Не хочу
Не знаю, что это за дневник.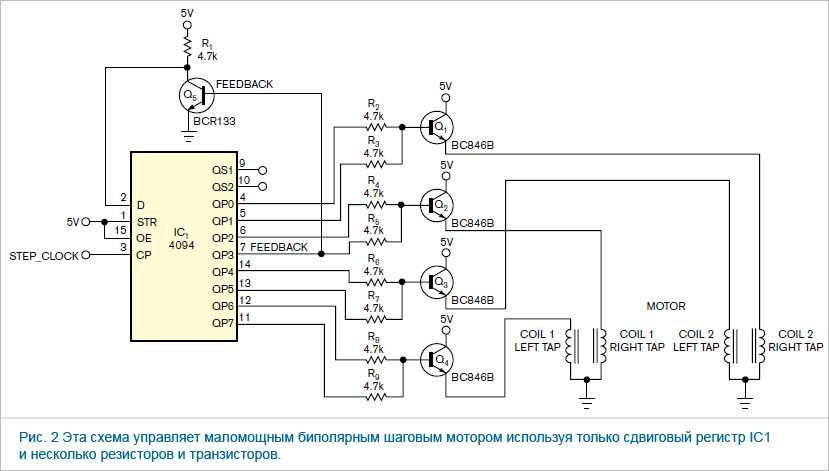 Я тут пока новичок.
Я тут пока новичок.
Когда то, давно, образовалась фирм…
Читать дальше
104
Подпишитесь на автора
Подписаться
Не хочу
Итак у меня была возможность попробовать реализовать все на базе MMU2 (1ч, 2ч, 3ч, 4ч, 5ч,). У меня…
Читать дальше
Читайте в блогах
Схема шагового двигателя
— онлайн-курс по цифровой электронике
На следующей схеме показаны различные блоки схемы для управления униполярным шаговым двигателем. Два блока:
- 2-битный синхронный счетчик. Входы: D (направление) и CLK. D будет определять направление вращения, а частота CLK будет устанавливать скорость вращения.
- Схема привода двигателя и униполярный шаговый двигатель — схема привода двигателя переводит Q A и Q B цифровые сигналы для соответствующих управляющих токов, требуемых шаговым двигателем.
2-битный синхронный счетчик
Следующая диаграмма состояний описывает последовательность шаговых двигателей.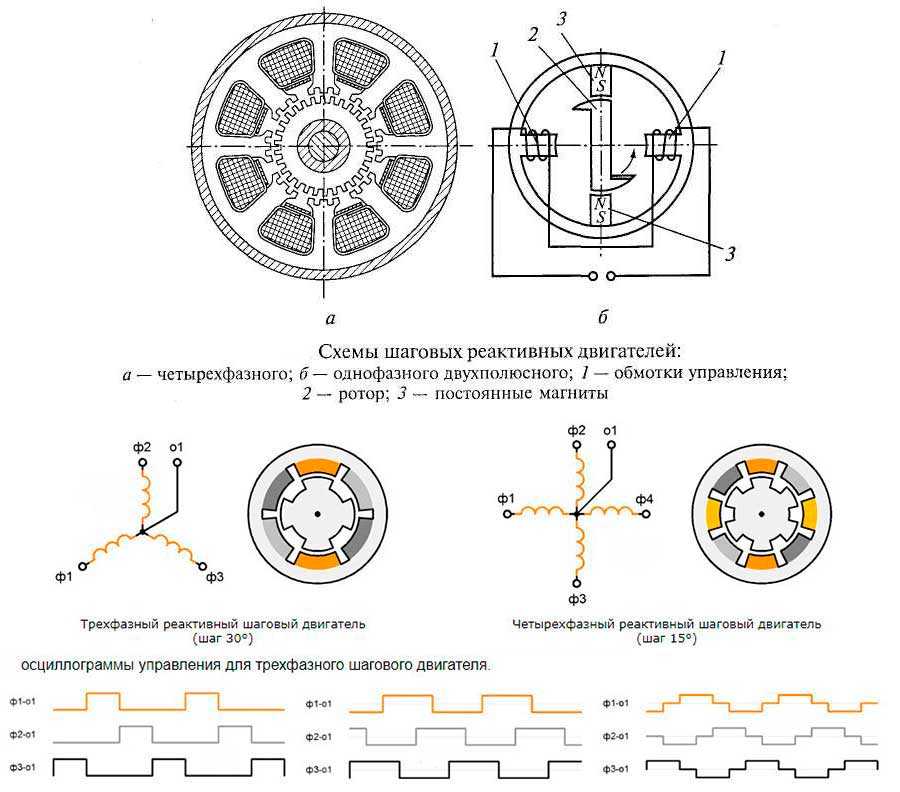
Получается из таблицы ниже. С диаграммой состояний перейдите к проектированию синхронных цепей, чтобы получить схему.
Схема драйвера двигателя и униполярный шаговый двигатель
Обычный шаговый двигатель представляет собой униполярный двигатель с четырьмя катушками. Они называются униполярными, потому что требуют только включения и выключения их катушек.
Показан шаговый двигатель PF443-03A от Mycom. Он указан при напряжении питания 12В и токе катушки 0,31А. Каждый шаг составляет 1,8 градуса. Для прототипирования можно поставить шаговый двигатель от 5В.
Шаговый двигатель не может управляться напрямую с выхода триггеров. ULN2003, высоковольтный, сильноточный драйвер Дарлингтона, состоящий из семи пар Дарлингтона NPN, используется для привода двигателя. Все они оснащены встроенными фиксирующими диодами для переключения индуктивных нагрузок. ULN2003 имеет максимальное поддерживаемое выходное напряжение 50 В и максимальный выходной ток 0,5 А на канал, что легко соответствует требованиям шагового двигателя Mycom PF443.
Показана пошаговая последовательность для униполярного шагового двигателя с четырьмя катушками. Если вы запускаете пошаговую последовательность вперед, степпер вращается по часовой стрелке; запустить его назад, и степпер вращается против часовой стрелки. Скорость двигателя зависит от того, насколько быстро контроллер выполняет последовательность шагов.
Поскольку доходы от рекламы падают, несмотря на увеличение числа учащихся, нам нужна ваша помощь, чтобы поддерживать и улучшать этот сайт, что требует времени, денег и тяжелой работы. Благодаря щедрости наших учеников, которые пожертвовали ранее, вы можете пользоваться этим сайтом бесплатно.
Если вы воспользовались этим сайтом и можете, пожалуйста, отправьте через Paypal . Это позволит нам
продолжаться в будущем. Это займет всего минуту. Спасибо!
2 доллара США 5 долларов США 10 долларов США
Если вы хотите повеселиться с акустической гитарой, наша веб-гитара гарантирует вам быстрый старт.
Играть
Комбинационные логические схемы
- Анализ комбинационной логики
- Стандартные формы логических выражений
- Упростить логические выражения
- Булева алгебра
- Карта Карно
- Проектирование комбинационной логики
Приложения комбинационной логики
- Арифметические схемы
- Компараторы
- Кодировщики и дешифраторы
- Мультиплексоры и демультиплексоры
- Средства проверки четности
Полное руководство и многое другое!
Что такое драйвер двигателя? Двигатель — это электронное устройство, которое помогает преобразовывать электрическую энергию в механическую. Таким образом, мотор-драйвер позволяет проводить автоматические работы с использованием электроэнергии. У нас есть несколько различных типов электродвигателей. Эти типы включают двигатели постоянного тока, шаговые двигатели и серводвигатели. Их принципы работы и характеристики являются отличительными факторами среди этих двигателей. Выбор правильного типа драйвера двигателя очень важен, поскольку он позволяет вашему двигателю эффективно работать с выбранным вами микроконтроллером. Эта статья поможет вам понять, как работает драйвер двигателя, характеристики, типы и основные компоненты при выполнении соединений. Давай начнем!
Выбор правильного типа драйвера двигателя очень важен, поскольку он позволяет вашему двигателю эффективно работать с выбранным вами микроконтроллером. Эта статья поможет вам понять, как работает драйвер двигателя, характеристики, типы и основные компоненты при выполнении соединений. Давай начнем!
Кто такой моторист?
Судя по названию, драйвер двигателя означает устройство, которое приводит в движение двигатели. Однако микросхемы драйверов двигателей не могут работать без микроконтроллера.
Драйвер двигателя представляет собой интерфейс между двигателем и микроконтроллером. Причина в том, что микроконтроллер и двигатель работают в разных диапазонах напряжений. Двигатель будет потреблять более высокий уровень тока, чем микроконтроллер.
Модуль драйвера двигателя требуется при подключении двух устройств, работающих при разных уровнях тока, к источнику питания. В этом случае двигатель действует как третье устройство, повышающее или понижающее напряжение питания.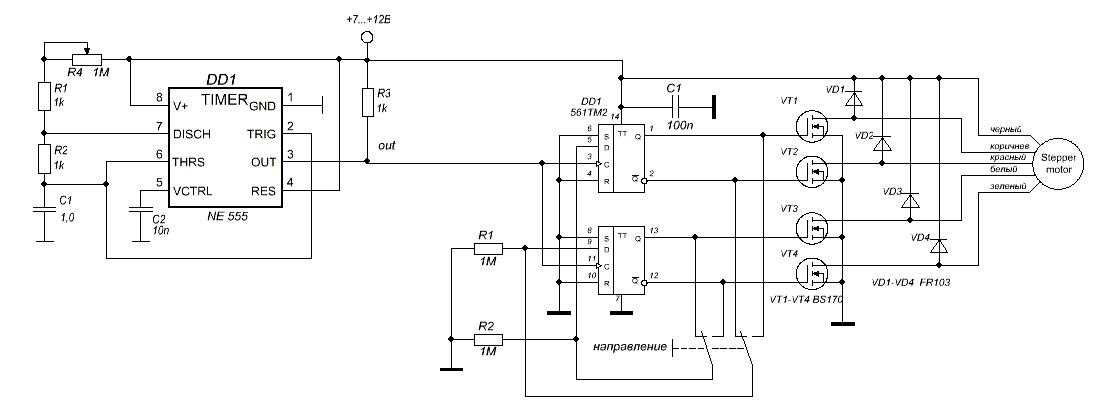
В настоящее время большинство драйверов двигателей на рынке представлены в виде интегральных схем. Существуют разные приводные двигатели; следовательно, они имеют другие характеристики. Затем вы подключаете эти микросхемы драйвера двигателя к контроллеру двигателя через мостовую схему H.
(микроконтроллер типа Arduino)
Критические характеристики драйверов двигателей
Совместимые двигатели
Невозможно найти моторные приводы, подходящие ко всем электродвигателям. Некоторые производители изготавливают драйверы двигателей специально для определенных типов двигателей. Однако производители облегчают вам задачу, поскольку они предоставляют драйверам список всех совместимых двигателей.
Примечательно, что большинство драйверов совместимы с двигателями постоянного тока и шаговыми двигателями. Тем не менее, серводвигатель заслуживает большего внимания при выборе драйвера двигателя.
Интерфейс
Многие электроприводы прекрасно работают, если их поместить на интерфейс платы драйвера Arduino. Однако для некоторых беспроводных проектов требуется драйвер беспроводного двигателя. Например, плата контроллера Bluetooth — хорошая плата управления для беспроводного проекта.
Напряжение и ток
Напряжение и ток являются наиболее важными характеристиками, на которые следует обращать внимание при выборе идеального привода двигателя. При работе над проектом вы уже должны знать, какое напряжение питания и рабочий ток требуется вашему проекту. Драйвер, который вы собираетесь использовать, должен соответствовать необходимому уровню функциональности.
(раздел проекта Arduino.)
Основные компоненты с приводом от двигателя
Вам потребуются серводвигатель, контроллер, блок питания и необходимые соединения для серводвигателя. Для двигателя постоянного тока вам понадобится контроллер, схема драйвера двигателя, двигатель постоянного тока, блок питания и необходимые прямые соединения.
Для двигателя постоянного тока вам понадобится контроллер, схема драйвера двигателя, двигатель постоянного тока, блок питания и необходимые прямые соединения.
Этот контроллер может быть микроконтроллером или микропроцессором. Схема управления драйвером двигателя представляет собой усилитель тока, который увеличивает ток от микроконтроллера, помогая управлять двигателем.
Кроме того, двигатель вызывает движение. Процесс сопряжения двигателя с контроллером, бесщеточным двигателем и шаговым двигателем часто требует контроллера привода двигателя. Кроме того, блок питания обеспечивает двигатель только необходимым током.
(шаговый электродвигатель)
Различные типы драйверов двигателей
Мы различаем драйверы в зависимости от типа управления, которое они обеспечивают. Например, некоторые обеспечивают управление без скорости, а другие предлагают управление с высокой скоростью. Примечательно, что один двигатель может использовать разные типы драйверов. Однако некоторые специфические драйверы работают для одного двигателя. В таблице ниже показано это явление.
Однако некоторые специфические драйверы работают для одного двигателя. В таблице ниже показано это явление.
| Двигатель | Привод двигателя |
| Шаговый двигатель | А4988, Л293, ДРВ8833, УЛН2003 |
| Двигатель постоянного тока | А4988, Л293, ДРВ8833 |
| Серводвигатель | Л293 |
(серводвигатель крупным планом)
Как работает драйвер двигателя?
Сначала микроконтроллер посылает сигналы двигателю. Затем полученные знаки интерпретируются и затем активизируются в двигателе. Двигатель имеет два входа напряжения. Первый контакт включает драйвер, тогда как контакт 2 подает напряжение на двигатель через микросхему двигателя.
Если микропроцессор передает входной сигнал высокого уровня на ИС драйвера, ИС драйвера отправит тот же входной сигнал. Следовательно, это объясняет, что ИС не меняет тип принимаемого сигнала.
Следовательно, это объясняет, что ИС не меняет тип принимаемого сигнала.
(когда двигатель движется по часовой стрелке) (когда двигатель движется против часовой стрелки.)
Источник: Wiki Commons . Затем S1 позволит своему напряжению проходить через двигатель непосредственно к S4. Во время протекания этого тока цепь становится полностью замкнутой. Далее этот ток будет течь из точки V в точку М через переключатели S1 и S4. В результате двигатель остается включенным и вращается по часовой стрелке.
Сначала мы подаем на переключатели входное напряжение. В результате переключатели S1 и S4 в конце концов замкнутся. Более того, это формирует положительное соединение, поскольку мы подключаем два параллельных переключателя. Следовательно, двигатель будет вращаться против часовой стрелки. С другой стороны, чтобы двигатель повернулся против часовой стрелки, мы активируем переключатели S3 и S2.
(интегральная схема)
Зачем нужен драйвер двигателя?
Примечательно, что драйвер необходим, потому что микроконтроллеру требуется более низкое напряжение, чем двигателям.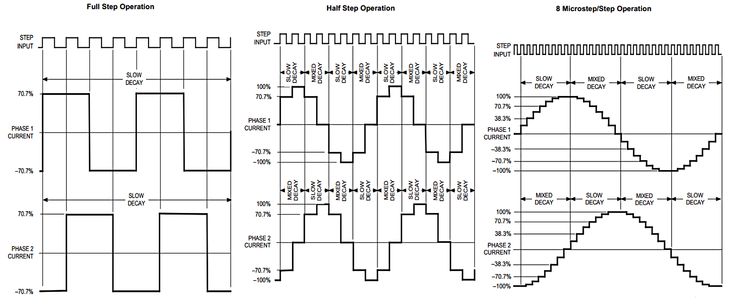 Из-за этого мы не можем подавать питание напрямую от микроконтроллера к двигателю. На данный момент нам нужен драйвер двигателя между этими электрическими компонентами. Драйвер увеличивает ток от микропроцессора, чтобы он соответствовал току двигателя.
Из-за этого мы не можем подавать питание напрямую от микроконтроллера к двигателю. На данный момент нам нужен драйвер двигателя между этими электрическими компонентами. Драйвер увеличивает ток от микропроцессора, чтобы он соответствовал току двигателя.
Что такое схема Н-моста?
Соединение двух пар транзисторов в цепь образует Н-образную схему, которую мы называем Н-мостом.
На противоположном конце двигателя разместите каждую пару транзисторов с разной функциональностью. Одна команда получает входное напряжение, а другая пара остается заземленной.
(схема Н-моста)
Источник: Wiki Commons
При положительной полярности переключайте по одной паре транзисторов за раз. Теперь ток течет от источника напряжения к положительной клемме. Затем ток от клеммы +VE течет к клемме -VE, которая, наконец, течет на землю.
Однако при отрицательной полярности происходит обратное, и включается другая пара транзисторов. Во-первых, ток будет течь прямо к отрицательной клемме от источника напряжения. Затем ток от отрицательной клеммы течет прямо к положительной клемме, а затем попадает на землю.
Во-первых, ток будет течь прямо к отрицательной клемме от источника напряжения. Затем ток от отрицательной клеммы течет прямо к положительной клемме, а затем попадает на землю.
Этот переменный поток тока образует схему Н-моста.
(фото транзисторов.)
Сборка схем драйвера двигателя
Для создания схемы драйвера вам потребуются следующие материалы.
- Батарея 9В.
- Ардуино УНО.
- Колеса
- Фактический двигатель постоянного тока.
- Перемычки.
- Доска для хлеба
Драйвер L293D представляет собой 16-канальный драйвер двигателя. В нем есть; 4 контакта заземления, четыре входных контакта, четыре выходных контакта, 2 контакта включения и два контакта напряжения.
(схема драйвера двигателя L293D с шаговым двигателем.)
Источник: Wiki Commons
Чтобы построить схему, следуйте приведенной выше схеме.